automating graph-based motion synthesis lucas kovar michael gleicher university of wisconsin-madison
TRANSCRIPT
Automating Graph-Based Motion Automating Graph-Based Motion SynthesisSynthesis
Lucas KovarLucas Kovar
Michael GleicherMichael Gleicher
University of Wisconsin-MadisonUniversity of Wisconsin-Madison
Working with Large Data SetsWorking with Large Data Sets
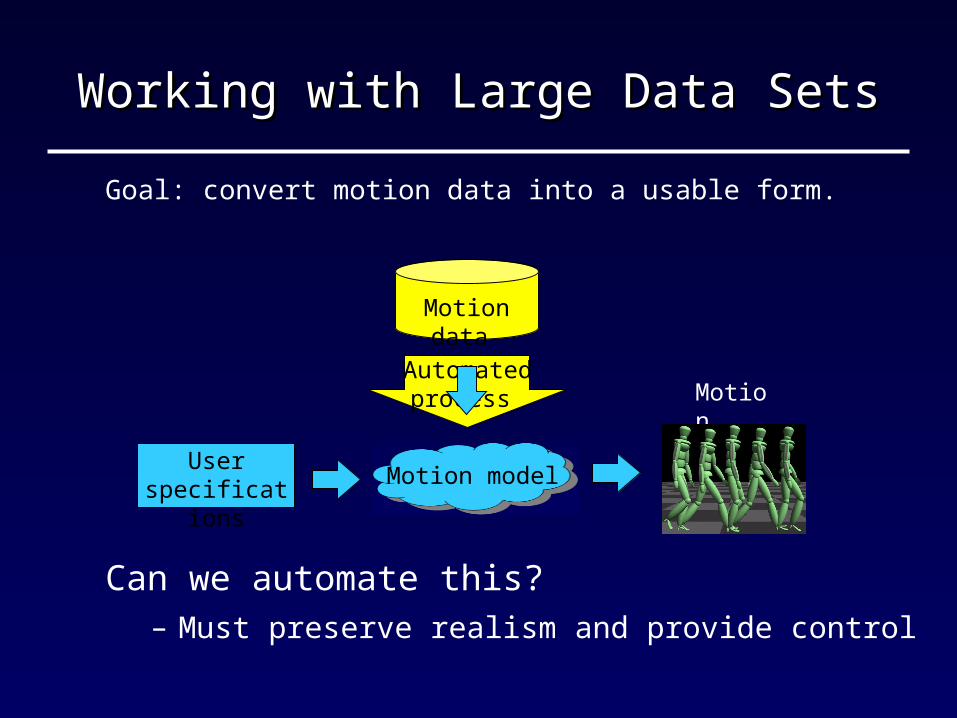
Goal: convert motion data into a usable form.
Can we automate this?– Must preserve realism and provide control
Motion model User
specifications
MotionAutomated process
Motion data
Graph-Based SynthesisGraph-Based Synthesis
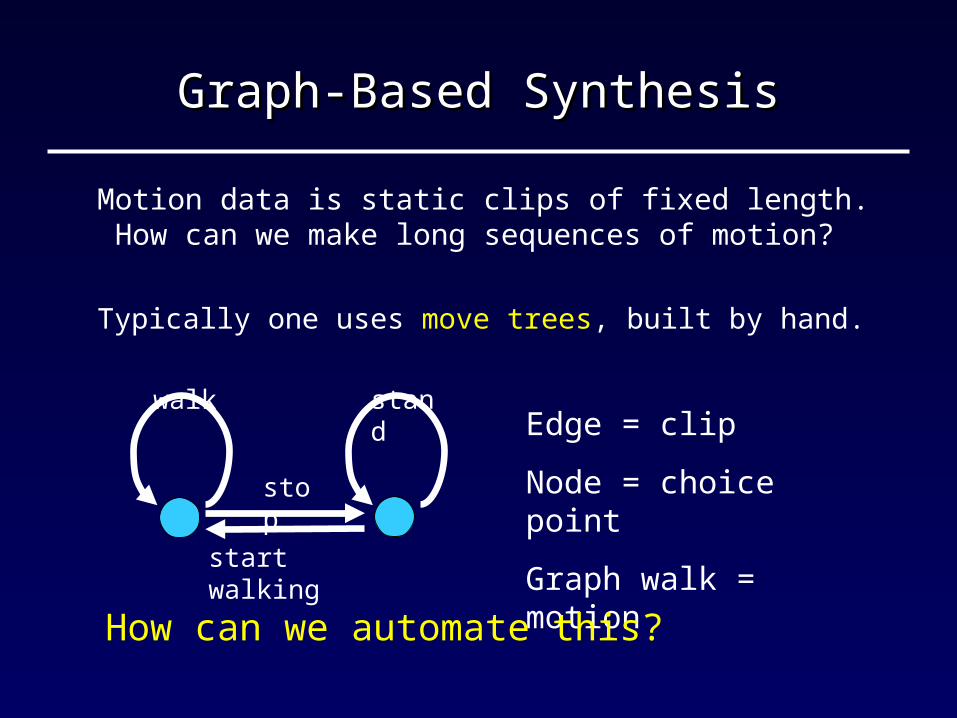
Motion data is static clips of fixed length. How can we make long sequences of motion?
walkEdge = clip
Node = choice point
Graph walk = motion
stand
stop
start walking
Typically one uses move trees, built by hand.
How can we automate this?
OutlineOutline
• Motion graphs
• Snap-together motion
OutlineOutline
• Motion graphs
– Building motion graphs
– Using motion graphs
• Snap-together motion
Motion GraphsMotion Graphs
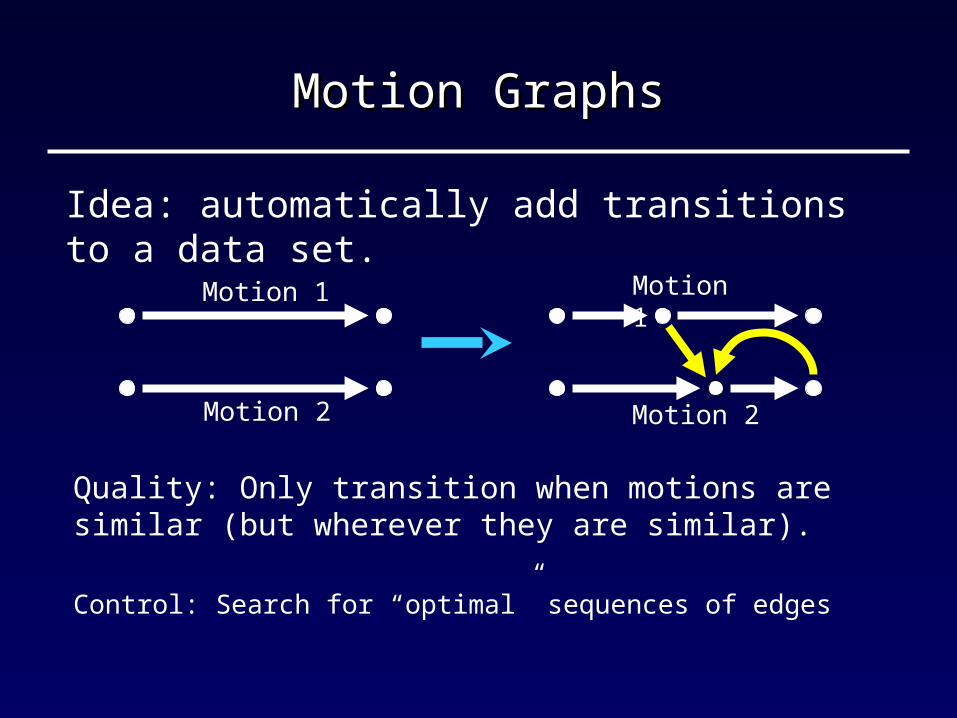
Idea: automatically add transitions to a data set.
Quality: Only transition when motions are similar (but wherever they are similar).
Motion 1
Motion 2
Motion 1
Motion 2
Control: Search for “optimal” sequences of edges
Related WorkRelated Work
• Statistical models
– Brand and Hertzmann ’01, Li et al. ’02
– Looser quality guarantees, less focus on control
• Other motion representations
– Simulation (Lamouret and van de Panne ’96)
– Video (Shödl et al. ’01, ‘02)
• Concurrent work
– Arikan and Forsyth ’02, Lee et al. ‘02
Motion Graphs: An ExampleMotion Graphs: An Example
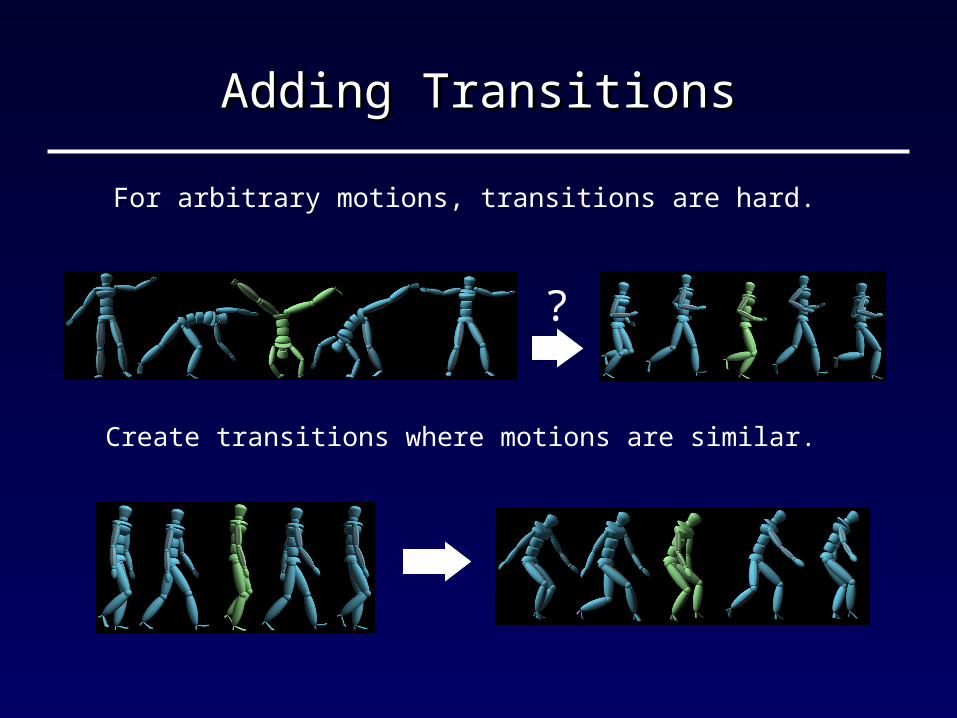
Adding TransitionsAdding Transitions
For arbitrary motions, transitions are hard.
Create transitions where motions are similar.
?
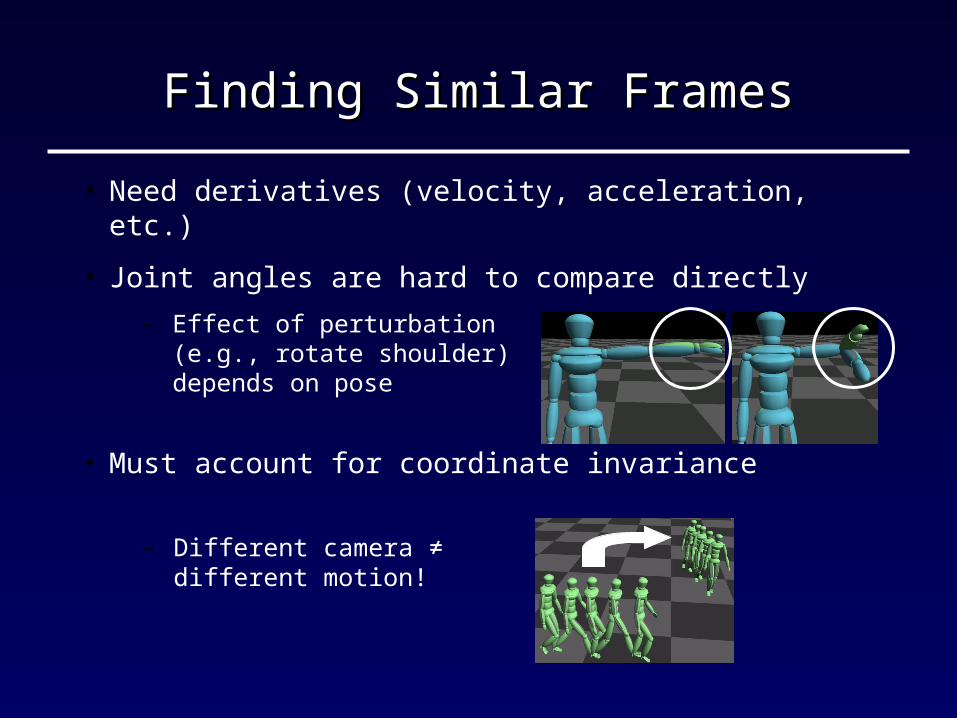
Finding Similar FramesFinding Similar Frames
• Need derivatives (velocity, acceleration, etc.)
• Joint angles are hard to compare directly
• Must account for coordinate invariance
– Effect of perturbation (e.g., rotate shoulder) depends on pose
– Different camera ≠ different motion!
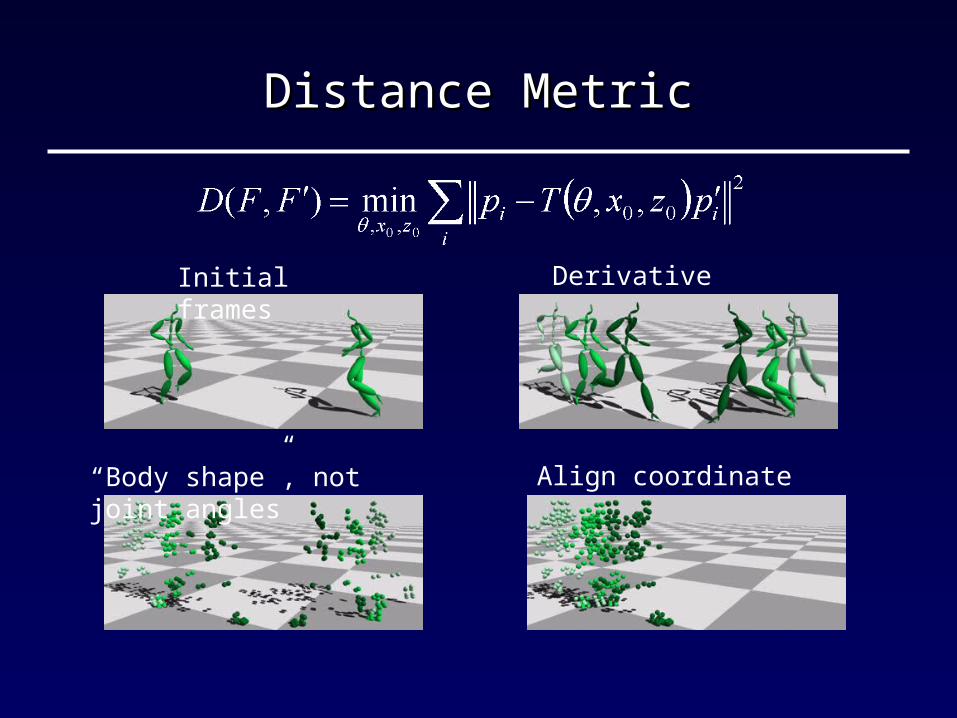
Distance MetricDistance Metric
Derivative information
Align coordinate systems“Body shape”, not joint angles
Initial frames
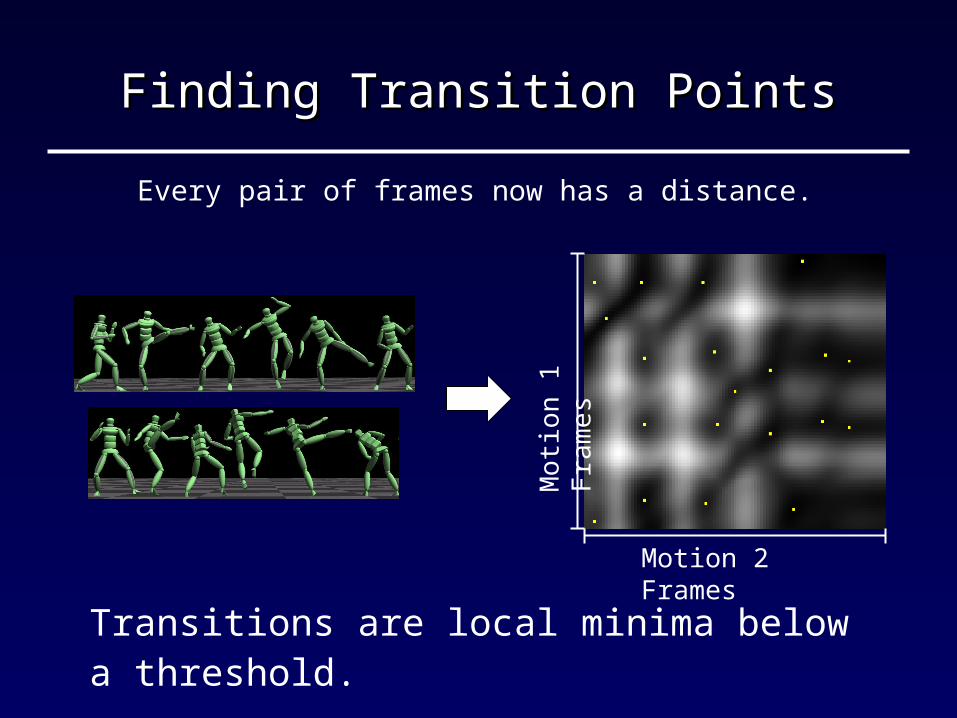
Finding Transition PointsFinding Transition Points
Every pair of frames now has a distance.
Transitions are local minima below a threshold.
Motion 2 FramesM
otio
n 1
Fra
me
s
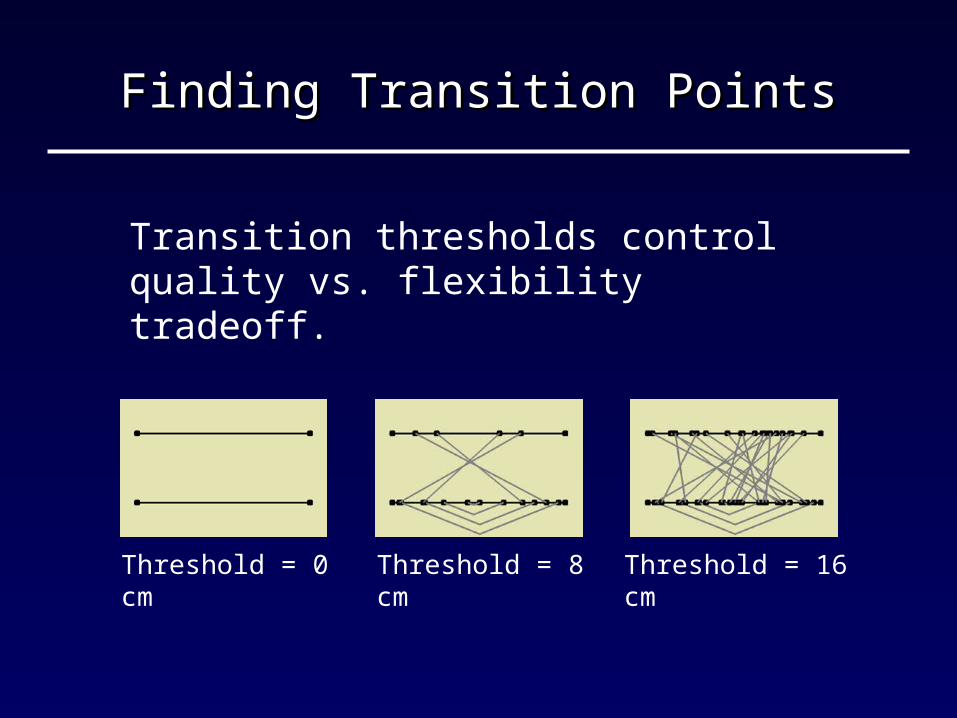
Finding Transition PointsFinding Transition Points
Transition thresholds control quality vs. flexibility tradeoff.
Threshold = 0 cm Threshold = 8 cm Threshold = 16 cm
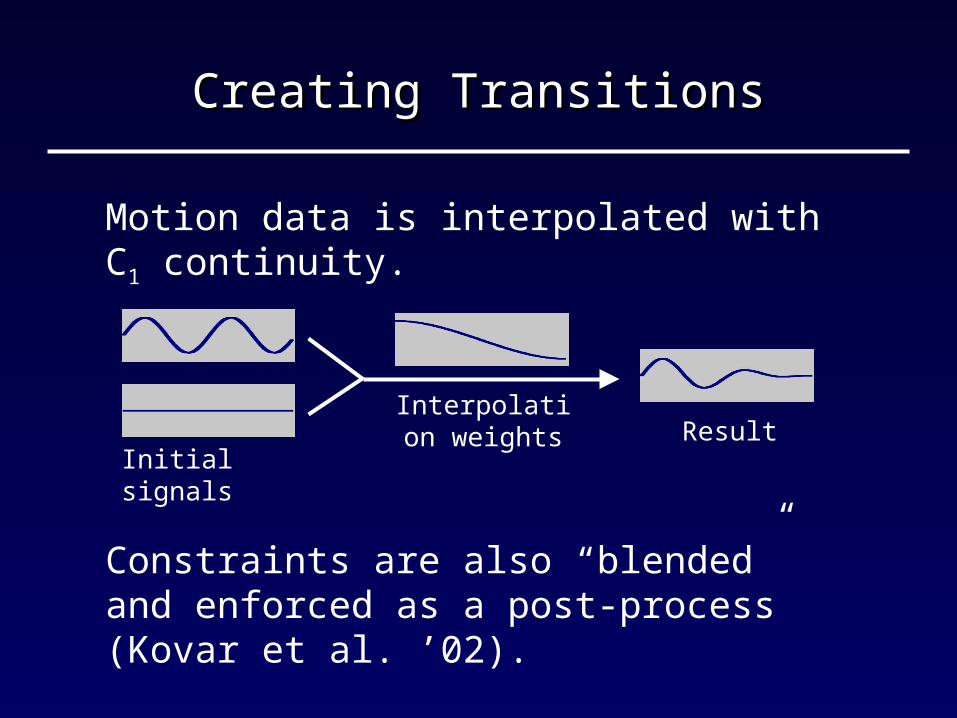
Creating TransitionsCreating Transitions
Motion data is interpolated with C1 continuity.
Initial signals
Interpolation weights Result
Constraints are also “blended” and enforced as a post-process (Kovar et al. ’02).
OutlineOutline
• Motion graphs
Building motion graphs
– Using motion graphs
• Snap-together motion
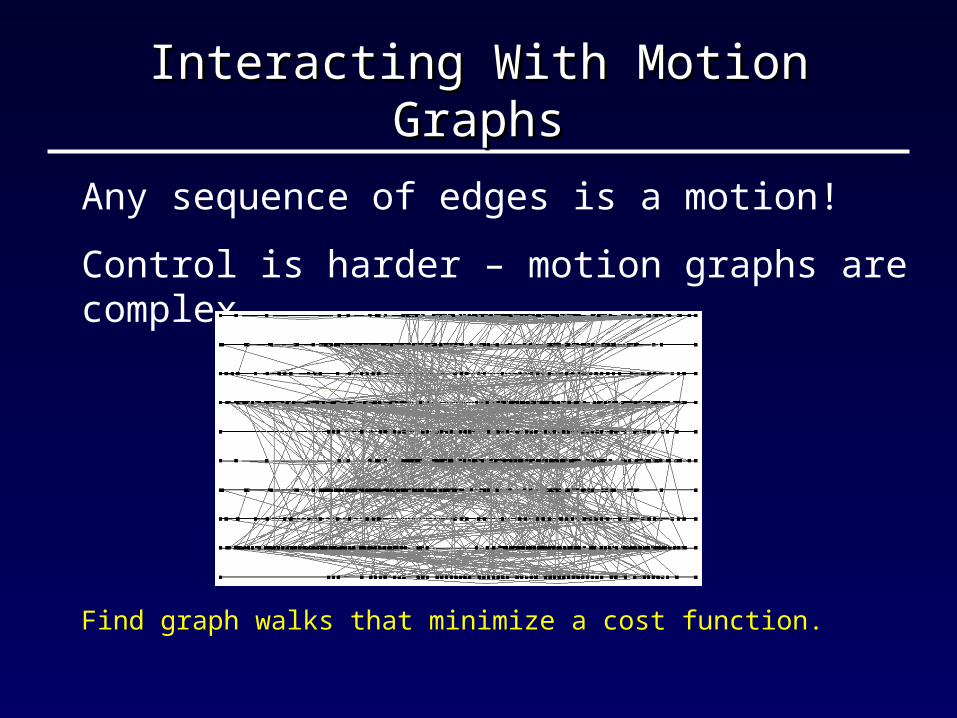
Interacting With Motion GraphsInteracting With Motion Graphs
Any sequence of edges is a motion!
Control is harder – motion graphs are complex.
Find graph walks that minimize a cost function.
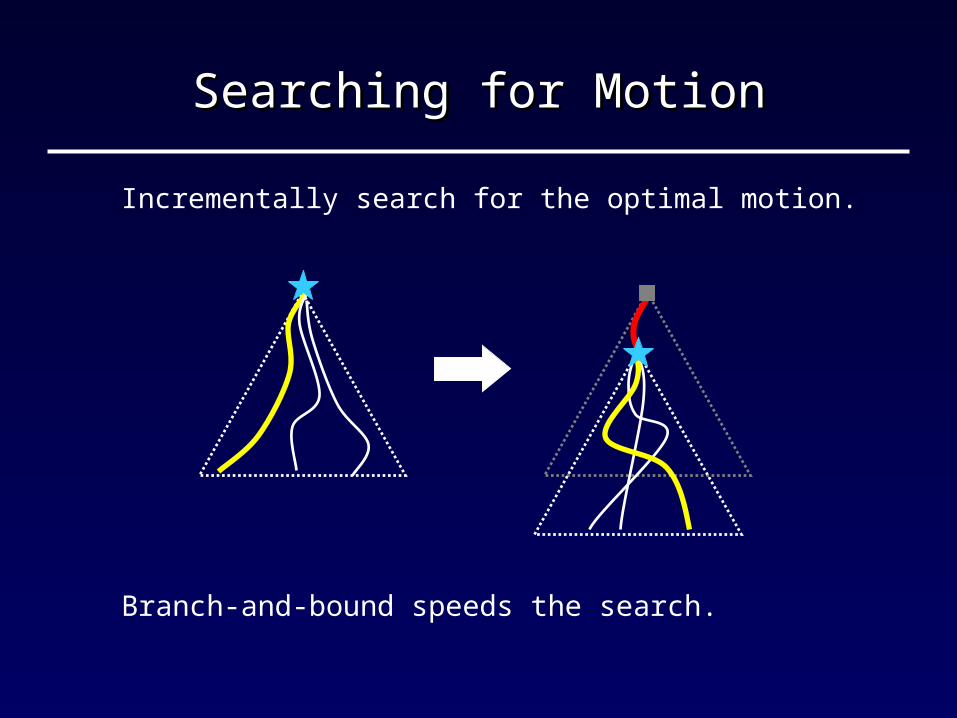
Searching for MotionSearching for Motion
Branch-and-bound speeds the search.
Incrementally search for the optimal motion.
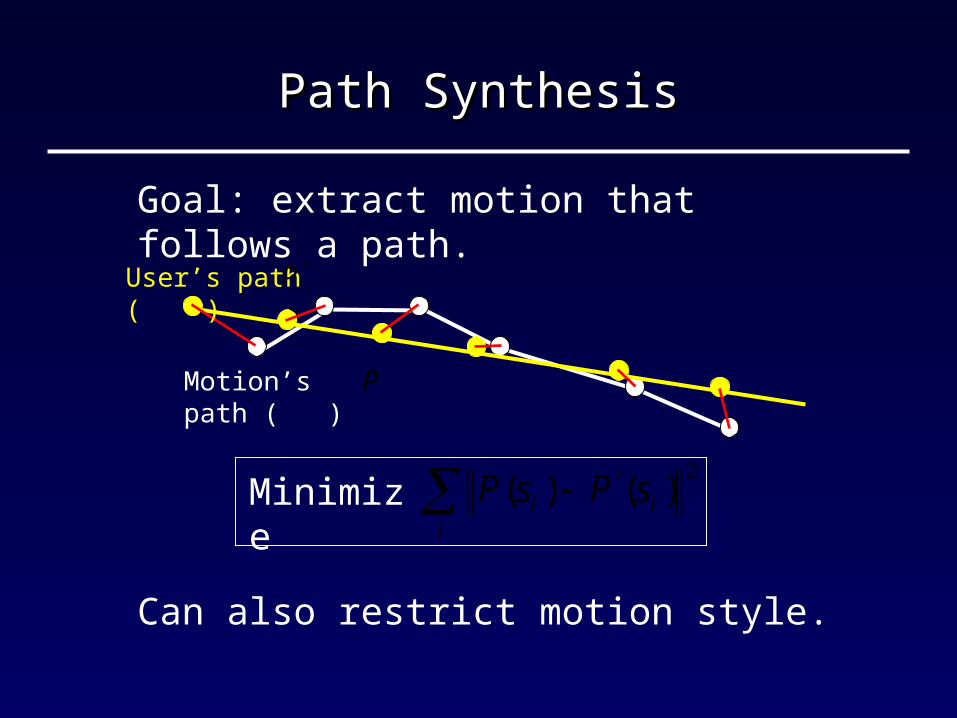
Path SynthesisPath Synthesis
Goal: extract motion that follows a path.
Can also restrict motion style.
User’s path ( )
Motion’s path ( )
Minimize
2)()(
iii sPsP
P
P
ResultsResults
OutlineOutline
Motion graphs
• Snap-together motion
Motion Graphs: Advantages/DrawbacksMotion Graphs: Advantages/Drawbacks
But, their complicated structure is problematic.
– Must use costly search methods
– Synthesized motion is only a “best fit”
– Graph is hard to reason about
Motion graphs allow one to create lengthy, complicated motions with little effort.
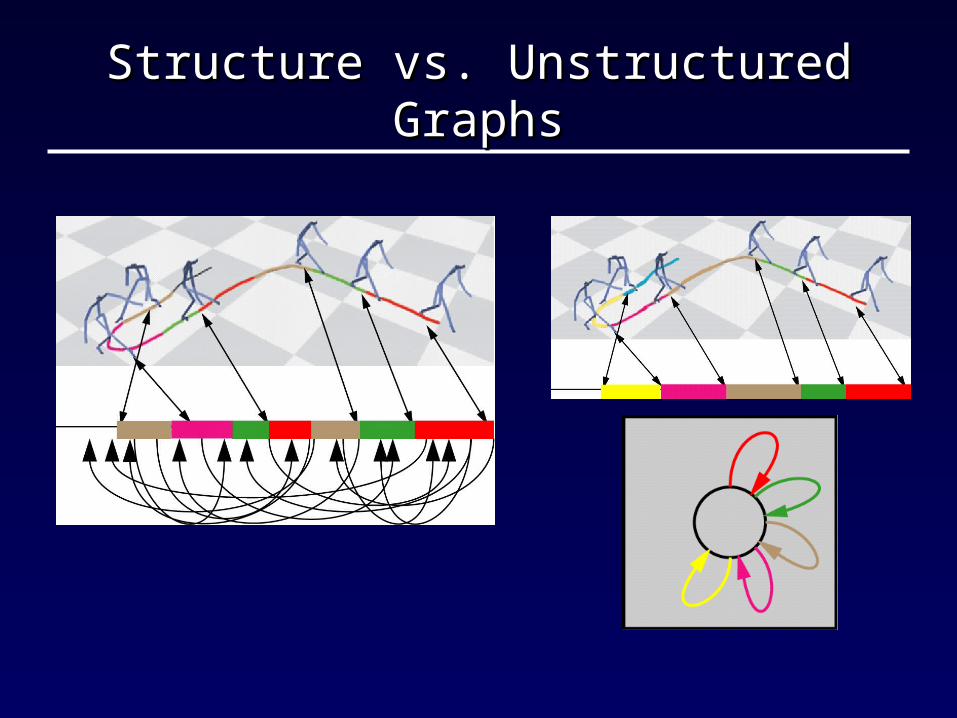
Structure vs. Unstructured GraphsStructure vs. Unstructured Graphs
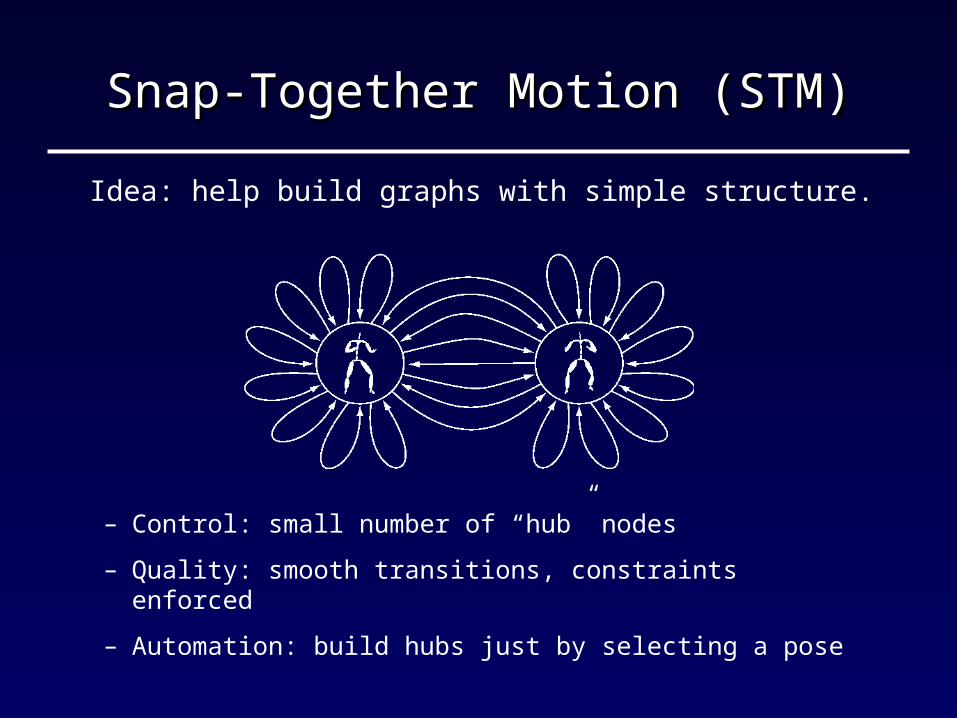
Snap-Together Motion (STM)Snap-Together Motion (STM)
Idea: help build graphs with simple structure.
– Control: small number of “hub” nodes
– Quality: smooth transitions, constraints enforced
– Automation: build hubs just by selecting a pose
STM: PreviewSTM: Preview
STM: OverviewSTM: Overview
Find groups of similar frames (match sets) and make multi-way transitions
1. Pick a “seed” frame or have the system suggest one
2. Find similar frames and add displacement maps so motions are identical
3. Ensure constraints remain enforced

STM: OverviewSTM: Overview
Snappable MotionSnappable Motion
Original MotionOriginal Motion
…
Synthesized MotionSynthesized Motion
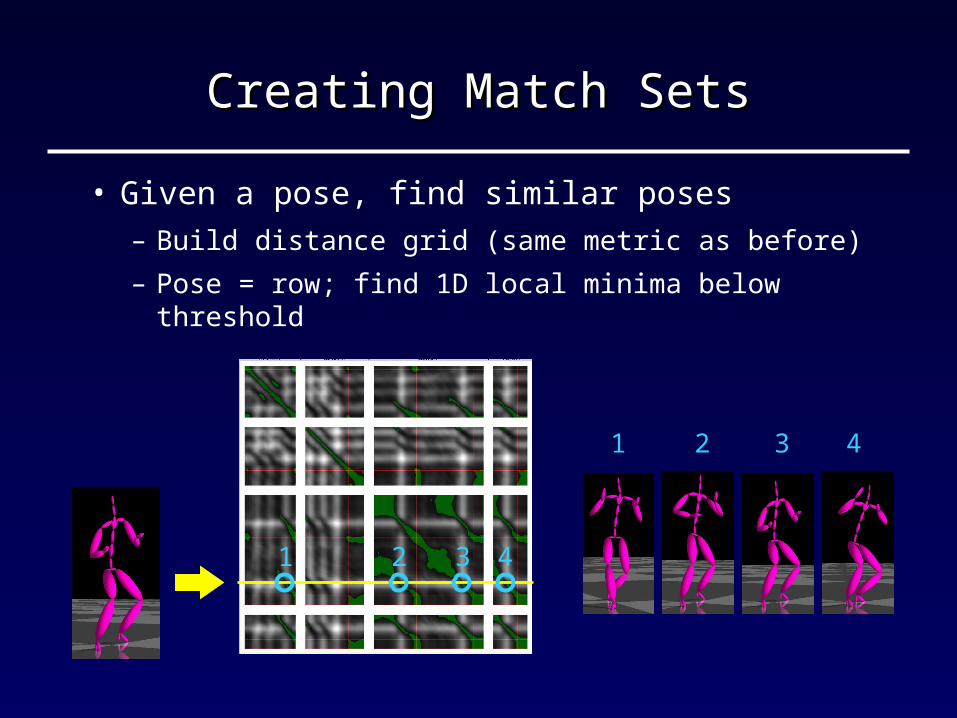
Creating Match SetsCreating Match Sets
• Given a pose, find similar poses– Build distance grid (same metric as before)
– Pose = row; find 1D local minima below threshold
1 2 3 4
1 2 3 4
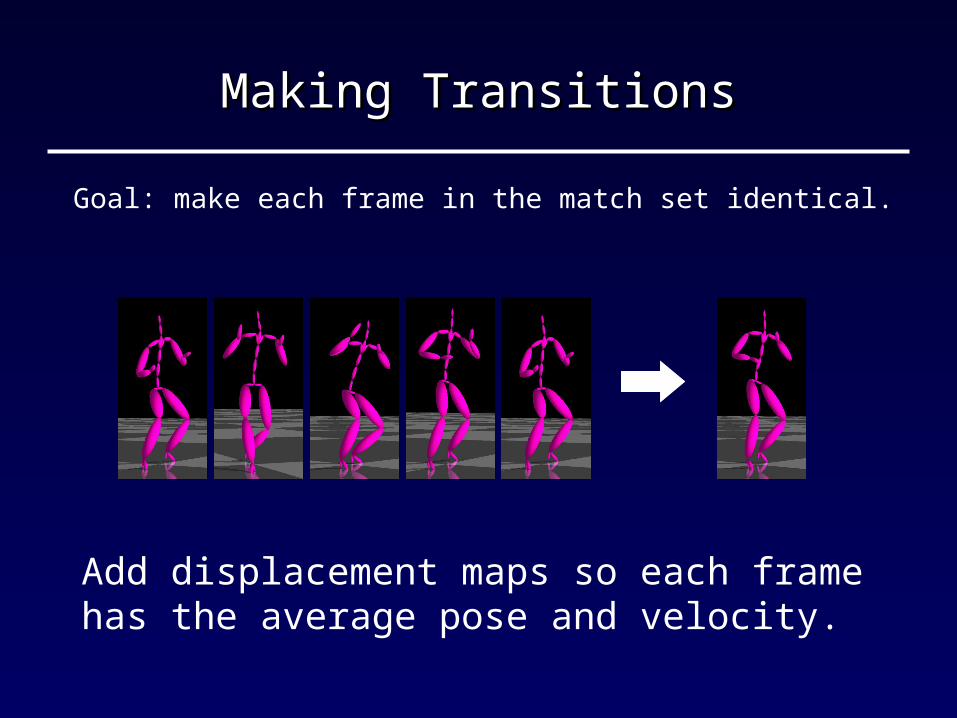
Making TransitionsMaking Transitions
Goal: make each frame in the match set identical.
Add displacement maps so each frame has the average pose and velocity.
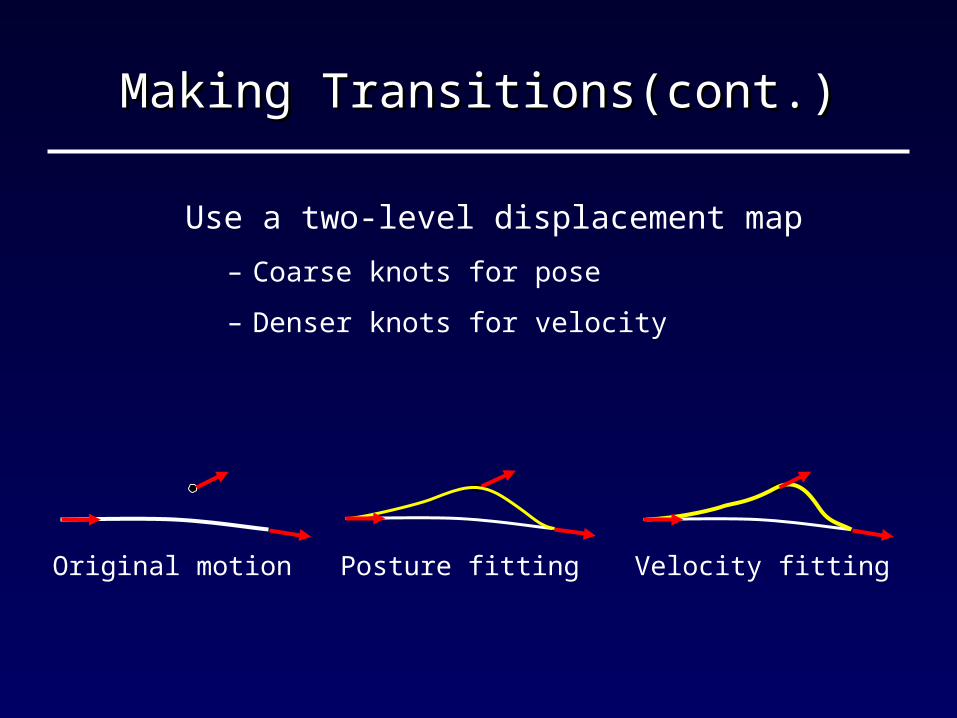
Making Transitions(cont.)Making Transitions(cont.)
Original motion Posture fitting Velocity fitting
Use a two-level displacement map
– Coarse knots for pose
– Denser knots for velocity

Enforcing ConstraintsEnforcing Constraints
Two-step process to preserve pose at each hub1. Enforce constraints on frames in the match set.
2. Fix these frames, enforce in rest of each clip.
Problem: conflicting constraints
Hub 1 Hub 2
Solution: group hub nodes with conflicts and find single constraint position over group.
Foot positions don’t match!
constraint spans clip
ResultsResults
ConclusionConclusion
Simplify graph-based synthesis by automating the identification and tuning of transitions.
Different strategies different kinds of graphs
– Motion graphs: “greedy” strategy is general and highly automated, but synthesis requires search
– STM: clustering makes simpler graphs for improved control, but assumes hub poses exist.