cellular automata for 3d morphing sudhanshu k semwal kaushal s chandrashekar department of computer...
Post on 21-Dec-2015
219 views
TRANSCRIPT

CELLULAR AUTOMATA FOR 3D CELLULAR AUTOMATA FOR 3D MORPHINGMORPHING
Sudhanshu K SemwalSudhanshu K Semwal
Kaushal S ChandrashekarKaushal S Chandrashekar
Department of Computer ScienceDepartment of Computer Science
University of Colorado at Colorado SpringsUniversity of Colorado at Colorado Springs
OutlineOutline
Introduction to MorphingIntroduction to Morphing BackgroundBackground Design of volume morphing algorithmsDesign of volume morphing algorithms ImplementationImplementation ResultsResults Future workFuture work ConclusionsConclusions

Introduction to MorphingIntroduction to Morphing
MorphingMorphing Given a source model S and a target Given a source model S and a target
model T, morphing constructs a series model T, morphing constructs a series of transformations {Wof transformations {Wt t | t є | t є [0,1]} such [0,1]} such that Wthat W0 0 = S and W= S and W1 1 = T= T

Introduction to MorphingIntroduction to Morphing
Applications of morphingApplications of morphing MoviesMovies 3D games3D games Study of evolutionStudy of evolution Understanding fetal and plant growthUnderstanding fetal and plant growth

Introduction to MorphingIntroduction to Morphing
Types of morphingTypes of morphing 2 dimensional2 dimensional 3 dimensional3 dimensional
Benefits of 3 dimensional morphingBenefits of 3 dimensional morphing Free from lighting and environmental Free from lighting and environmental
considerationsconsiderations Real-time camera view changesReal-time camera view changes
BackgroundBackground Types of 3D morphingTypes of 3D morphing
Polygonal meshPolygonal mesh VolumetricVolumetric
Polygonal mesh morphingPolygonal mesh morphing Uses polygonal or polyhedral meshes as inputUses polygonal or polyhedral meshes as input MeshMesh
Linear surface composed of polygons described as Linear surface composed of polygons described as Vertex/Face/Edge/Graph or verticesVertex/Face/Edge/Graph or vertices
Describes topology of surfaceDescribes topology of surface

Background contdBackground contd BenefitsBenefits
Very popular format, supported by many Very popular format, supported by many modeling packages modeling packages
Most approaches are of this formMost approaches are of this form DrawbacksDrawbacks
Datasets from medical and geological fields Datasets from medical and geological fields do not support polygonal datado not support polygonal data
Complex topologies difficult to handle, esp. Complex topologies difficult to handle, esp. with user controlwith user control
Complex implementations reqd for Complex implementations reqd for processing and rendering processing and rendering

Background contd.Background contd.
Two parts of the morphing problemTwo parts of the morphing problem Correspondence problemCorrespondence problem Interpolation problemInterpolation problem

Background contdBackground contd
Volumetric morphingVolumetric morphing Uses 3 dimensional volumes as source and Uses 3 dimensional volumes as source and
targettarget Volumes composed of voxelsVolumes composed of voxels Voxels – atomic unit of volume, short for Voxels – atomic unit of volume, short for
volume pixelvolume pixel

Background contdBackground contd Volume defined as a collection of scattered Volume defined as a collection of scattered
voxels, with each voxel being associated with a voxels, with each voxel being associated with a set of values of size S, i.e, the volume V is given set of values of size S, i.e, the volume V is given by:by:
V = {(xV = {(xii, v, vii ) | x ) | xi i Є RЄ R33 , v, vi i Є RЄ RSS, i = 1 .. n } , i = 1 .. n } [[Chen1995]Chen1995]
Common representation is a 3 dimensional gridCommon representation is a 3 dimensional grid
Each (i,j,k) either empty or containing one valueEach (i,j,k) either empty or containing one value

Background contdBackground contd BenefitsBenefits
FFree of restrictions of topology and geometries ree of restrictions of topology and geometries Can be easily be applied to meshes by Can be easily be applied to meshes by
converting them to volumetric data, while the converting them to volumetric data, while the reverse can result in topologies difficult to morph.reverse can result in topologies difficult to morph.
Data in the medical, geological and energy fields Data in the medical, geological and energy fields is generated in the volumetric format and needs is generated in the volumetric format and needs to be morphed directly.to be morphed directly.
Do not need a bijective mapping between Do not need a bijective mapping between vertices of the source and target formats.vertices of the source and target formats.
The simple format allows implementation ease.The simple format allows implementation ease.

Background contd.Background contd.
DrawbacksDrawbacksNot as popular as polygonal formats in the Not as popular as polygonal formats in the
entertainment industry, fewer test models entertainment industry, fewer test models available.available.
Computationally intensive to process and Computationally intensive to process and render.render.

Background contd.Background contd.
[Cohen-Or1998][Cohen-Or1998] Uses distance field Uses distance field transformation methodtransformation method
Uses user-defined control pointsUses user-defined control points Morphing done using warping and Morphing done using warping and
cross-dissolvingcross-dissolving Disadvantage – quality of morph Disadvantage – quality of morph
dependent on control pointsdependent on control points

Background contd.Background contd.
Problems with current 3D morphing Problems with current 3D morphing techniquestechniques CorrespondenceCorrespondence Require user-defined control pointsRequire user-defined control points
ExhibitExhibit
TO

Background contd.Background contd.
Our goalOur goal Less restrictive approachLess restrictive approach Minimal or no user controlMinimal or no user control Natural looking processNatural looking process

Background contdBackground contd Cellular AutomataCellular Automata
Dynamic system composed of discrete cells, Dynamic system composed of discrete cells, work in discrete steps of time and are work in discrete steps of time and are characterized by local interactionscharacterized by local interactions
Some of the characteristics of CA are Some of the characteristics of CA are [Wolfram1984]:[Wolfram1984]: They utilize a discrete lattice of sitesThey utilize a discrete lattice of sites Discrete time steps drive the simulation.Discrete time steps drive the simulation. Each site can only take a finite set of valuesEach site can only take a finite set of values Each site evolves according to same Each site evolves according to same
deterministic rulesdeterministic rules The evolution of a site only depends on the The evolution of a site only depends on the
neighborhood.neighborhood.

Design contdDesign contd
Characteristics of CA usedCharacteristics of CA used 3 dimensional lattice. 3 dimensional lattice. The dimension of the lattice is that of the The dimension of the lattice is that of the
volume. volume. Each cell can either be empty or contain one Each cell can either be empty or contain one
value.value. All cells are equalAll cells are equal The cellular automaton is non-circular.The cellular automaton is non-circular.

Design contdDesign contd
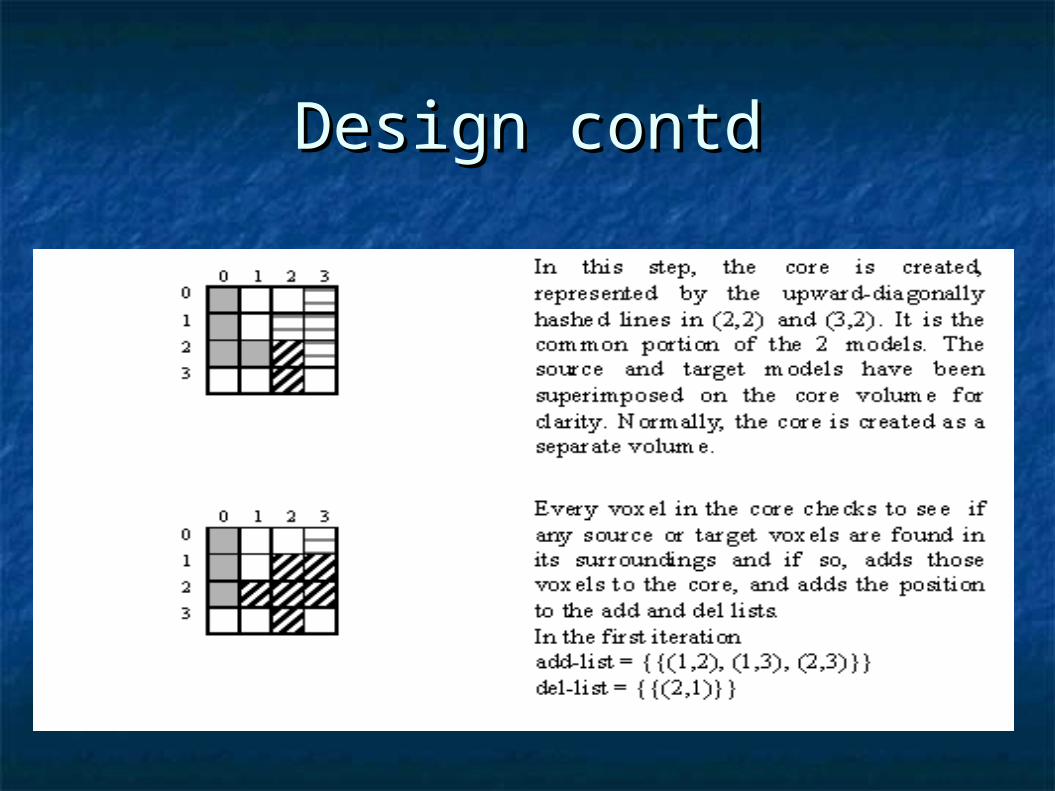
Core increment algorithmCore increment algorithm Source and target volumes overlaid within Source and target volumes overlaid within
same CAsame CA Uses intersection of 2 volumes as baseUses intersection of 2 volumes as base Intersection is called the Intersection is called the corecore Core incremented step-wise to fill both source Core incremented step-wise to fill both source
and target volumesand target volumes At each iteration, each voxel in the core At each iteration, each voxel in the core
checks its surroundings, if source or target checks its surroundings, if source or target voxel found, adds that voxel to the core.voxel found, adds that voxel to the core.

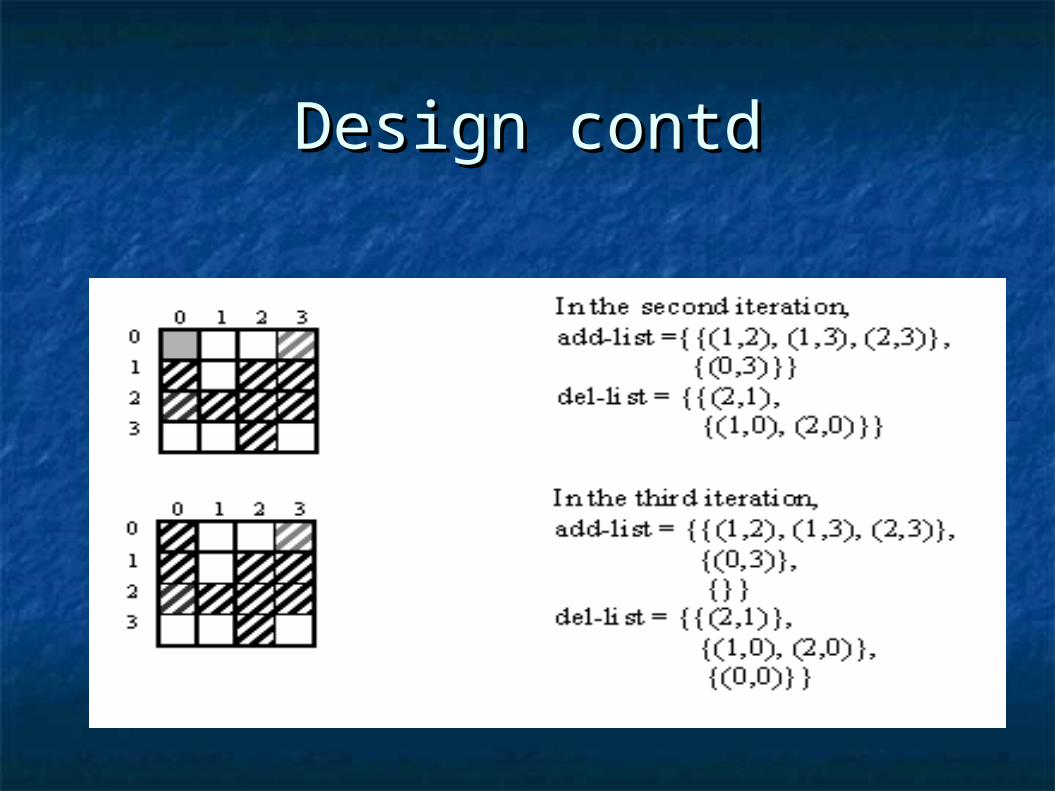
Design contdDesign contd Voxels required to start from core and fill both Voxels required to start from core and fill both
volumes recorded in add-array(target volume) and volumes recorded in add-array(target volume) and del-array (source volume) as separate sets.del-array (source volume) as separate sets.
Process continues until core cannot increment any Process continues until core cannot increment any moremore
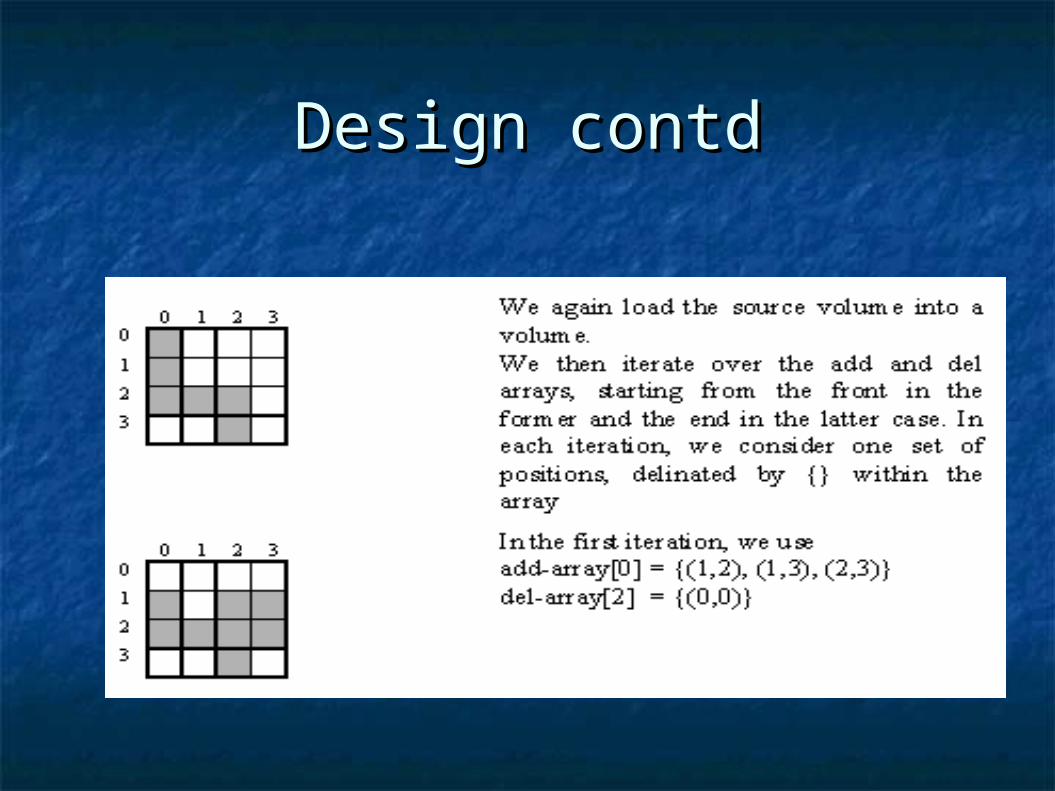
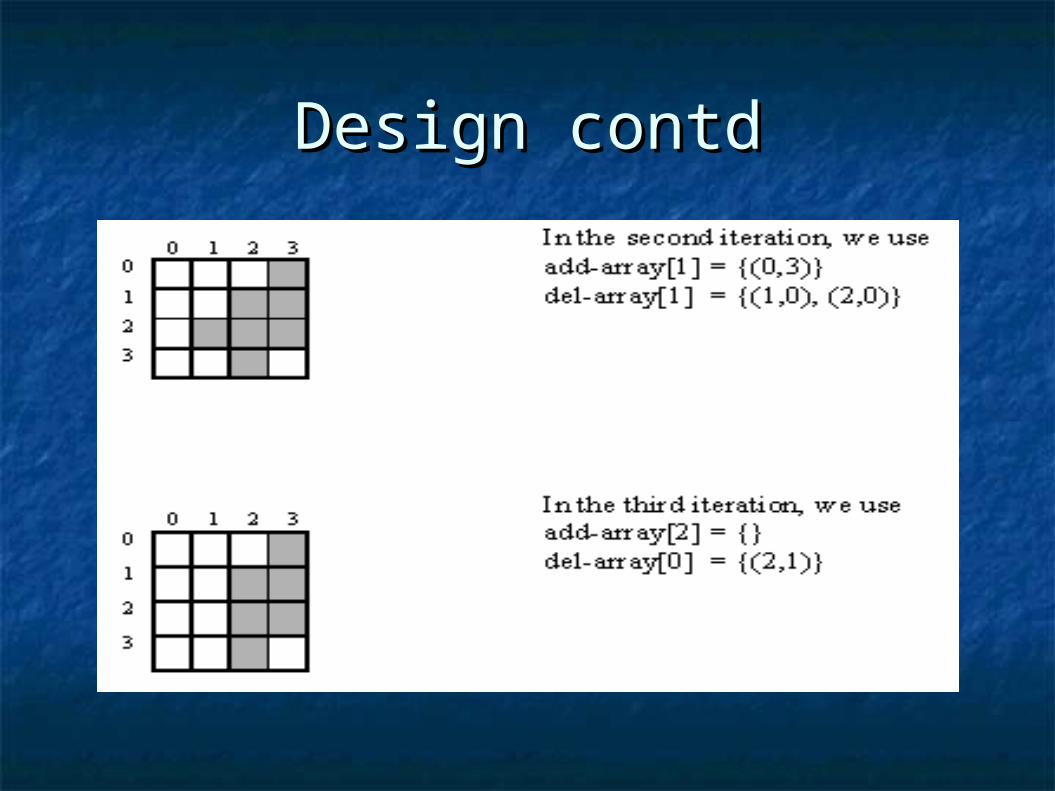
Source model loaded into new volumeSource model loaded into new volume Add and del arrays scanned, former forward and Add and del arrays scanned, former forward and
latter in reverselatter in reverse At each iteration, voxels for that iteration in the del-At each iteration, voxels for that iteration in the del-
array are removed from the source volume and array are removed from the source volume and voxels for that iteration in the add-array are addedvoxels for that iteration in the add-array are added
Source voxels not intersecting with target are Source voxels not intersecting with target are gradually removed and target voxels are gradually gradually removed and target voxels are gradually addedadded
Generates a smooth organic qualityGenerates a smooth organic quality

Design contdDesign contd
Design contdDesign contd
Design contdDesign contd
Design contdDesign contd
Design contdDesign contd

Design contdDesign contd
BenefitsBenefits Rules defining behavior of cellular automata are Rules defining behavior of cellular automata are
simple, hence easy to upgrade or replace. simple, hence easy to upgrade or replace. Uses 3 dimensional arrays as volumes. Popular Uses 3 dimensional arrays as volumes. Popular
formats can be used directly. formats can be used directly. No correspondence required between source No correspondence required between source
and target models.and target models. The morph can be controlled because of the add The morph can be controlled because of the add
and delete arrays containing the information of and delete arrays containing the information of each iteration as separate sets. each iteration as separate sets.
Organic quality of morphOrganic quality of morph
Design contdDesign contd
DisadvantagesDisadvantages Requires intersection of volumesRequires intersection of volumes 4 volumes are reqd to be created, 4 volumes are reqd to be created,
Source, Target, Core, Source for morphing iterationSource, Target, Core, Source for morphing iteration Volumes containing source and target have to be Volumes containing source and target have to be
of same size, no restrictions on models of same size, no restrictions on models themselvesthemselves
No attempt to preserve massNo attempt to preserve mass Color handling not solved, no solution elsewhereColor handling not solved, no solution elsewhere
Design contdDesign contd
Bacterial growth modelBacterial growth model Based on papers using CA for bacterial Based on papers using CA for bacterial
simulationsimulation Bacteria modeled as individual agents Bacteria modeled as individual agents
in lattice and rules govern its reaction in lattice and rules govern its reaction to environment and other bacteriato environment and other bacteria
Each non-empty voxel in source Each non-empty voxel in source volume is considered as a bacteriumvolume is considered as a bacterium

Design contdDesign contd Rules for bacteriaRules for bacteria
Non-motile.Non-motile. HomogenousHomogenous Have 2 needs, food and the need to reproduce, the Have 2 needs, food and the need to reproduce, the
latter being dependent on the former. latter being dependent on the former. Will reproduce if it finds food and has space to place Will reproduce if it finds food and has space to place
its offspring by making a copy of itself.its offspring by making a copy of itself. Creates only one offspring per iteration.Creates only one offspring per iteration. Will live and reproduce infinitely given enough space.Will live and reproduce infinitely given enough space. Will die if food is not present in its current position.Will die if food is not present in its current position. Cooperate to keep each other aliveCooperate to keep each other alive. .

Design contdDesign contd
Bacterial Growth ModelBacterial Growth Model Each voxel in target considered inexhaustible Each voxel in target considered inexhaustible
source of foodsource of food Target volume overlaid in 3 dimensions over Target volume overlaid in 3 dimensions over
sourcesource Effectively, food is provided to bacteria in sourceEffectively, food is provided to bacteria in source For each position (i,j,k) in source, if (i,j,k) in target For each position (i,j,k) in source, if (i,j,k) in target
is non-empty, then (i,j,k) in source has foodis non-empty, then (i,j,k) in source has food Each bacterium in source checks to see if food Each bacterium in source checks to see if food
present in current positionpresent in current position
Design contdDesign contd If food found, and space available, If food found, and space available,
reproduces with certain probability p1reproduces with certain probability p1 If food not found in current position, and If food not found in current position, and
not surrounded, dies with certain not surrounded, dies with certain probability p2probability p2
Bacteria in features that do not intersect Bacteria in features that do not intersect with target starve and die, thus removing with target starve and die, thus removing those featuresthose features
Bacteria are encouraged to grow into Bacteria are encouraged to grow into features of the target volume, thus features of the target volume, thus morphing into that shapemorphing into that shape

Design contdDesign contdProbability of bacteria dying = 0.5Probability of bacteria reproducing = 1.0

Design contdDesign contd

Design contdDesign contd

Design contd
BenefitsBenefits Extremely simple algorithm, easy to Extremely simple algorithm, easy to
implement.implement. The source and target volumes need to The source and target volumes need to
be loaded only once and morphing can be loaded only once and morphing can proceed.proceed.
No costly pre-processing steps required. No costly pre-processing steps required. Ideal as a quick and dirty method of Ideal as a quick and dirty method of
morphing, works well with models of morphing, works well with models of similar sizessimilar sizes

Design contdDesign contd
DisadvantagesDisadvantages Requires that input volumes be of same dimensions. Requires that input volumes be of same dimensions.
No restriction on the sizes of the models themselves.No restriction on the sizes of the models themselves. Computationally intensive because each voxel has Computationally intensive because each voxel has
to be considered. Can be alleviated to a certain to be considered. Can be alleviated to a certain extent by use of iso-surfaces of the source volumeextent by use of iso-surfaces of the source volume
Needs intersection of volumes to work.Needs intersection of volumes to work. No way to control the morphing process. No way to control the morphing process. No support for handling color No support for handling color

ImplementationImplementation
C++ used as implementation languageC++ used as implementation language Visualization ToolKit used for renderingVisualization ToolKit used for rendering

ResultsResults Test cases:Test cases:
a)a) Input.bin to Fuel.bin Input.bin to Fuel.bin• 64 X 64 X 64 volume size64 X 64 X 64 volume size• 17,000 non-empty voxels17,000 non-empty voxels• Large extent of intersectionLarge extent of intersection
b)b) Cube256x256x256.bin to aneurism.binCube256x256x256.bin to aneurism.bin::• 256 x 256 x 256 sized datasets256 x 256 x 256 sized datasets• 1.1 million non-empty voxels 1.1 million non-empty voxels • Target dissipated through volume, branch likeTarget dissipated through volume, branch like• Small amount of overlapSmall amount of overlap

Results contdResults contdc)c) Cube256x256x256.bin to MRI-head.bin:Cube256x256x256.bin to MRI-head.bin:
• 256 x 256 x 256 sized datasets.256 x 256 x 256 sized datasets.• 7.1 million non-empty voxels7.1 million non-empty voxels• Source model overlaps and is smaller than Source model overlaps and is smaller than
targettarget• Large number of voxel additionsLarge number of voxel additions
d) MRI-head.bin to bonsai.bind) MRI-head.bin to bonsai.bin• 256 x 256 x 256 sized datasets.256 x 256 x 256 sized datasets.• 7.3 million non-empty voxels7.3 million non-empty voxels• Source model overlaps and is larger than targetSource model overlaps and is larger than target• Large number of voxel deletionsLarge number of voxel deletions

Bacterial growth modelBacterial growth modelVolume
Dimensions:Source
non-emptyVoxelCount
Targetnon-empty
VoxelCount
No ofiterations
AvgMorphing Time periteration
(secs)
Total Timetaken formorphing
(secs)
AvgRendering
Time(secs)
a64 X 64 X 64
4096 13731 32 0.02 0.64 0.76
b256X256X256 1000000 168948
387 1.16 448.92 3.16
c 256X256X256 10000006198649
132 3.38 446.16 2.14
d 256X256X256 6176412 1298598 195 1.33 259.35 2.71
Results contdResults contd
ObservationsObservations
Complexity is nComplexity is n33 where n is the size of one where n is the size of one dimension of the source or target volume.dimension of the source or target volume.
In normal cases, the amount of time taken In normal cases, the amount of time taken for each iteration as well as the number of for each iteration as well as the number of iterations depend on the size of the volume iterations depend on the size of the volume and the number of non-empty voxels within and the number of non-empty voxels within it.it.
Results contdResults contd
In case of test (b), the small amount of overlap In case of test (b), the small amount of overlap leads to a large amount of additions and leads to a large amount of additions and deletions. deletions.
The performance of this algorithm is better than The performance of this algorithm is better than the core increment method due to iso-surfacingthe core increment method due to iso-surfacing
This algorithm seems to do well in cases where This algorithm seems to do well in cases where therethere is a large percentage of overlap is a large percentage of overlap betweenbetween volumesvolumes
The quality of the morphs is in general worse The quality of the morphs is in general worse than the core-increment algorithmthan the core-increment algorithm
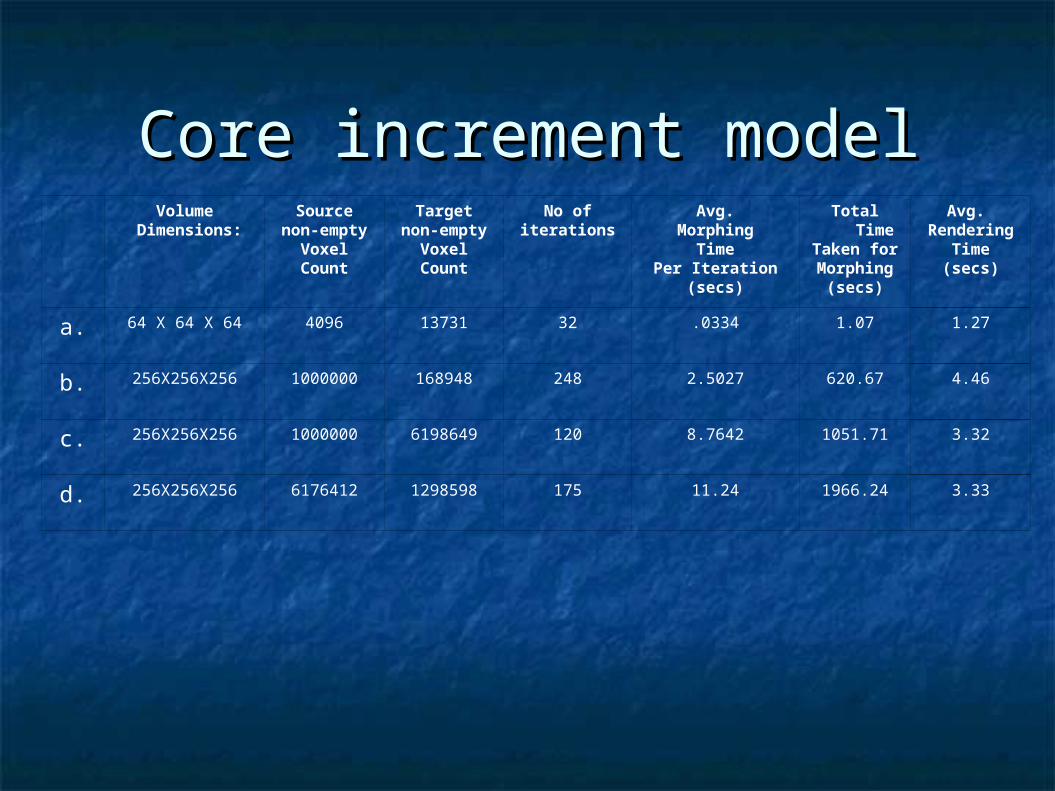
Core increment modelCore increment modelVolume
Dimensions:Source
non-emptyVoxelCount
Targetnon-empty
VoxelCount
No ofiterations
Avg.Morphing
TimePer Iteration
(secs)
Total TimeTaken for Morphing
(secs)
Avg. Rendering
Time(secs)
a. 64 X 64 X 64 4096 13731 32 .0334 1.07 1.27
b. 256X256X256 1000000 168948 248 2.5027 620.67 4.46
c. 256X256X256 1000000 6198649 120 8.7642 1051.71 3.32
d. 256X256X256 6176412 1298598 175 11.24 1966.24 3.33
Results contdResults contd ObservationsObservations
The complexity of this algorithm is of the order of nThe complexity of this algorithm is of the order of n33. .
The time taken to morph increases linearly with the The time taken to morph increases linearly with the
dimension of the volume.dimension of the volume. There is no performance hit even when the overlap There is no performance hit even when the overlap
in test (b) is significantly lower than the others. in test (b) is significantly lower than the others.
Tests suggest that the core increment algorithm is Tests suggest that the core increment algorithm is
more stable with a varied type of source and target more stable with a varied type of source and target
models than the bacterial growth models.models than the bacterial growth models.

Results contdResults contd
Movies of ResultsMovies of Results

Future Work
Handling non-intersecting volumes Multi-value volume support Parallelization Color handling Scripting language support

ConclusionConclusion Two algorithms for morphing Two algorithms for morphing
volumetric data developedvolumetric data developed Do not require any correspondence Do not require any correspondence
informationinformation Do not require any user control.Do not require any user control. Disparate models can be morphedDisparate models can be morphed ApplicationsApplications
EntertainmentEntertainment MedicineMedicine Evolution, geology, education etcEvolution, geology, education etc
Thank youThank you
Any Questions?Any Questions?

Introduction to MorphingIntroduction to Morphing
Desirable features of 3D morphing are:Desirable features of 3D morphing are: Intermediate transitions should undergo Intermediate transitions should undergo
continuous 3D transformationscontinuous 3D transformations SShould apply to a variety of shapes and hould apply to a variety of shapes and
topologiestopologies Should be able to use user input, but work Should be able to use user input, but work
well without it alsowell without it also

Background contd.Background contd.
Current researchCurrent research [Lee1999] simplify source and target [Lee1999] simplify source and target
meshes to form coarse base domainsmeshes to form coarse base domains Since base domains are simple meshes, Since base domains are simple meshes,
easy to find correspondenceeasy to find correspondence Allows user defined featuresAllows user defined features

Background contd.Background contd.
Current ResearchCurrent Research [He1994] use Direct interpolation[He1994] use Direct interpolation For a function s(x,y,z) representing the source For a function s(x,y,z) representing the source
volume in 3D space and a function t(x,y,z) volume in 3D space and a function t(x,y,z) representing the target volumerepresenting the target volume
IIgg(x,y,z) = (1 – g) s(x,y,z) + g t(x,y,z) , 0 <= g <= 1(x,y,z) = (1 – g) s(x,y,z) + g t(x,y,z) , 0 <= g <= 1
where Iwhere Ig g is a function that represents the is a function that represents the intermediate volumes.intermediate volumes.
Problems with high frequency componentsProblems with high frequency components
Background contdBackground contd
Volumetric morphing usedVolumetric morphing used Reason for using volumetric morphingReason for using volumetric morphing
FFertile area of research, allowing more room for ertile area of research, allowing more room for innovation.innovation.
Simple and unrestricted nature allow Simple and unrestricted nature allow unconventional approaches to be implemented unconventional approaches to be implemented with ease.with ease.
The cellular automata based algorithm fits the The cellular automata based algorithm fits the volumetric approach in comparison to other 3D volumetric approach in comparison to other 3D techniques such as polygonal morphingtechniques such as polygonal morphing

Background contd.Background contd.
ApplicationsApplications VLSI design [Sarkar2000]VLSI design [Sarkar2000] Fault tolerant computing [Sarkar2000]Fault tolerant computing [Sarkar2000] Ecological simulations[Bezzi2000]Ecological simulations[Bezzi2000] Medical simulations [Sloot2002]Medical simulations [Sloot2002] Crowd behavior and social interaction Crowd behavior and social interaction
models [Hamagami2003]models [Hamagami2003] Physics modeling in games [Forsyth2002]Physics modeling in games [Forsyth2002]
Background contd.Background contd.
Current ResearchCurrent Research [Droun2003] [Droun2003] simulate highly deformable simulate highly deformable
substancessubstances Concept of virtual clayConcept of virtual clay 3D CA used with integer in each cell 3D CA used with integer in each cell
representing amount of clayrepresenting amount of clay Based on input, amount of clay is Based on input, amount of clay is
redistributed as model is manipulatedredistributed as model is manipulated

Background contd.Background contd.
[Claudia2001] use CA to simulate [Claudia2001] use CA to simulate landslideslandslides
Use the Cellular Automata Network model Use the Cellular Automata Network model Each component of system represented by Each component of system represented by
a CA and interactions between a CA and interactions between components form network.components form network.
Dependency graph generated to satisfy Dependency graph generated to satisfy dependencies of one component on dependencies of one component on anotheranother

Implementation contdImplementation contd
Input File FormatInput File Format Count of rows: unsigned charCount of rows: unsigned char Count of columns: unsigned charCount of columns: unsigned char Count of depth: unsigned charCount of depth: unsigned char Raw data in horizontal slice fashion, with Raw data in horizontal slice fashion, with
(0,0,0) at the top front part of the volume (0,0,0) at the top front part of the volume and (row-max, col-max, depth-max) at the and (row-max, col-max, depth-max) at the bottom back part : unsigned char bottom back part : unsigned char
Dimensions have to be lesser than 1024Dimensions have to be lesser than 1024

DesignDesign
Basis of designBasis of design Search for simplicity – Occam's RazorSearch for simplicity – Occam's Razor Analyzed problem at most basic level, ignoring Analyzed problem at most basic level, ignoring
correspondence and interpolation problemscorrespondence and interpolation problems Looked at volumetric morphing as a collection of Looked at volumetric morphing as a collection of
voxels comprising the source model trying to voxels comprising the source model trying to achieve similarity with the voxels in the target achieve similarity with the voxels in the target modelmodel
Realized global control mechanisms not reqd.Realized global control mechanisms not reqd. Cellular automata was perfect answerCellular automata was perfect answer
Implementation contdImplementation contd Supporting ProgramsSupporting Programs
raw2nativeformat raw2nativeformat raw2nativeformat rows columns depth inputfilename raw2nativeformat rows columns depth inputfilename
outputfilenameoutputfilename resizevolumeresizevolume
resizevolume inputfilename rows colums depth resizevolume inputfilename rows colums depth outputfilenameoutputfilename
createtestcubecreatetestcube createtestcube volumerows volumecols volumedepth createtestcube volumerows volumecols volumedepth
cubeStartx cubeStarty cubeStartz width height depth cubeStartx cubeStarty cubeStartz width height depth valueToFill outputfilenamevalueToFill outputfilename
volviewervolviewer volviewer filenamevolviewer filename

Implementation contdImplementation contd VTK classes used in thesisVTK classes used in thesis
VtkRendererVtkRenderer VtkRenderWindowVtkRenderWindow VtkPiecewiseFunctionVtkPiecewiseFunction VtkVolumePropertyVtkVolumeProperty VtkVolumeRayCastCompositeFunctionVtkVolumeRayCastCompositeFunction VtkVolumeVtkVolume VtkColorTransferFunctionVtkColorTransferFunction VtkVolumeRayCastMapperVtkVolumeRayCastMapper VtkStructuredPointsVtkStructuredPoints VtkRenderWindowInteractorVtkRenderWindowInteractor vtkUnsignedCharArrayvtkUnsignedCharArray

VTK PipelineVTK Pipeline

Class StructureClass Structure

Implementation contdImplementation contd
Classes implementedClasses implemented CAVolumeCAVolume CAVDataCAVData CAFileReaderCAFileReader CADisplayEngineCADisplayEngine CABaseMorphCABaseMorph CACoreIncrementMorphCACoreIncrementMorph CABacterialGrowthMorphCABacterialGrowthMorph