cga/qolt/old/forlizzi.docx · web viewherb interaction design, 2009-2010 three efforts: 1)...
TRANSCRIPT
HERB interaction design, 2009-2010Three efforts: 1) industrial and interaction design for HERB, 2) iPhone application for ordering drinks, 3) study about how robots recover from failures.
1) Industrial and interaction design for HERB (summer 2009)Two goals of this work: Develop a design-centered “story” — scenarios, interaction, and potential interface designs for the robot in a real world context of use. Design and create a housing to make the robot more aesthetically and functionally suitable for real world environments.
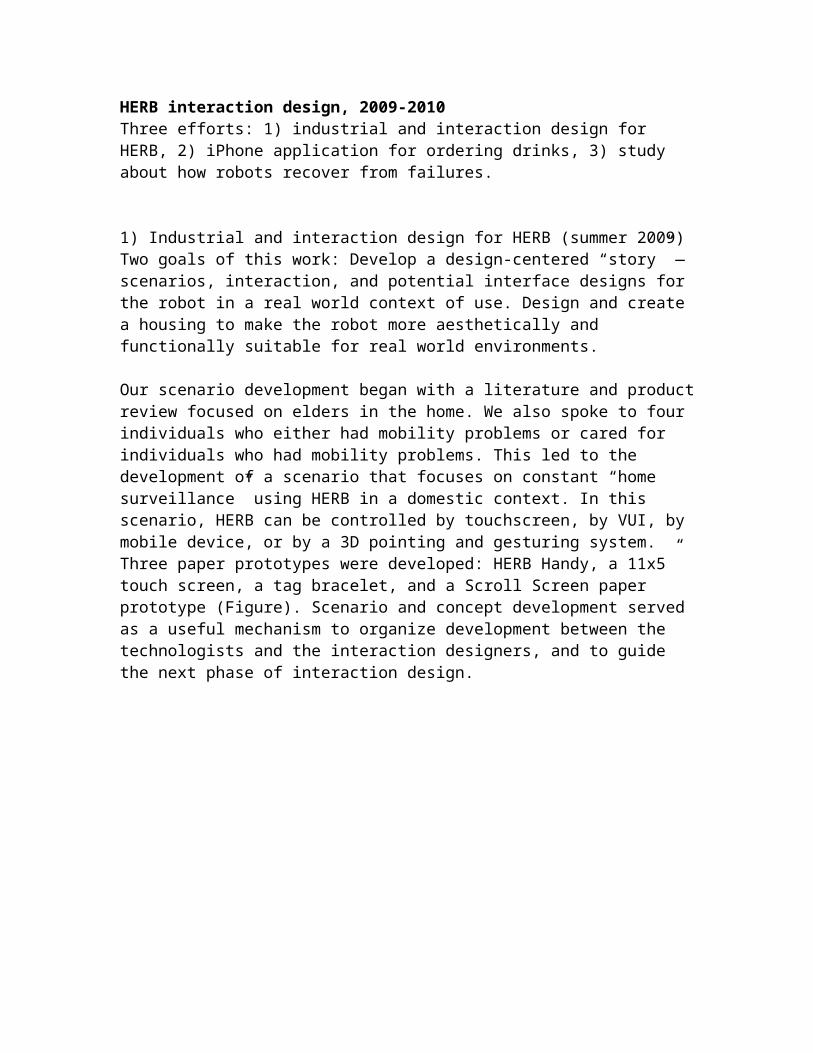
Our scenario development began with a literature and product review focused on elders in the home. We also spoke to four individuals who either had mobility problems or cared for individuals who had mobility problems. This led to the development of a scenario that focuses on constant “home surveillance” using HERB in a domestic context. In this scenario, HERB can be controlled by touchscreen, by VUI, by mobile device, or by a 3D pointing and gesturing system. Three paper prototypes were developed: HERB Handy, a 11x5” touch screen, a tag bracelet, and a Scroll Screen paper prototype (Figure). Scenario and concept development served as a useful mechanism to organize development between the technologists and the interaction designers, and to guide the next phase of interaction design.
Figure. Page from context setting scenario.
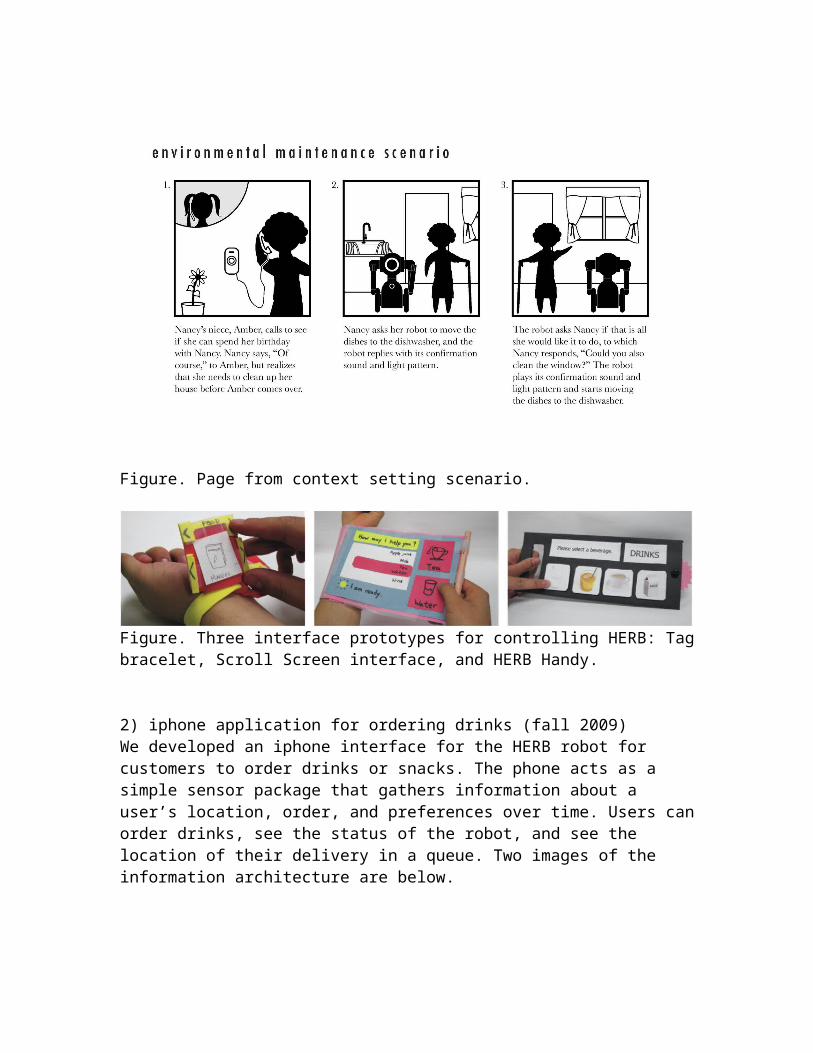
Figure. Three interface prototypes for controlling HERB: Tag bracelet, Scroll Screen interface, and HERB Handy.
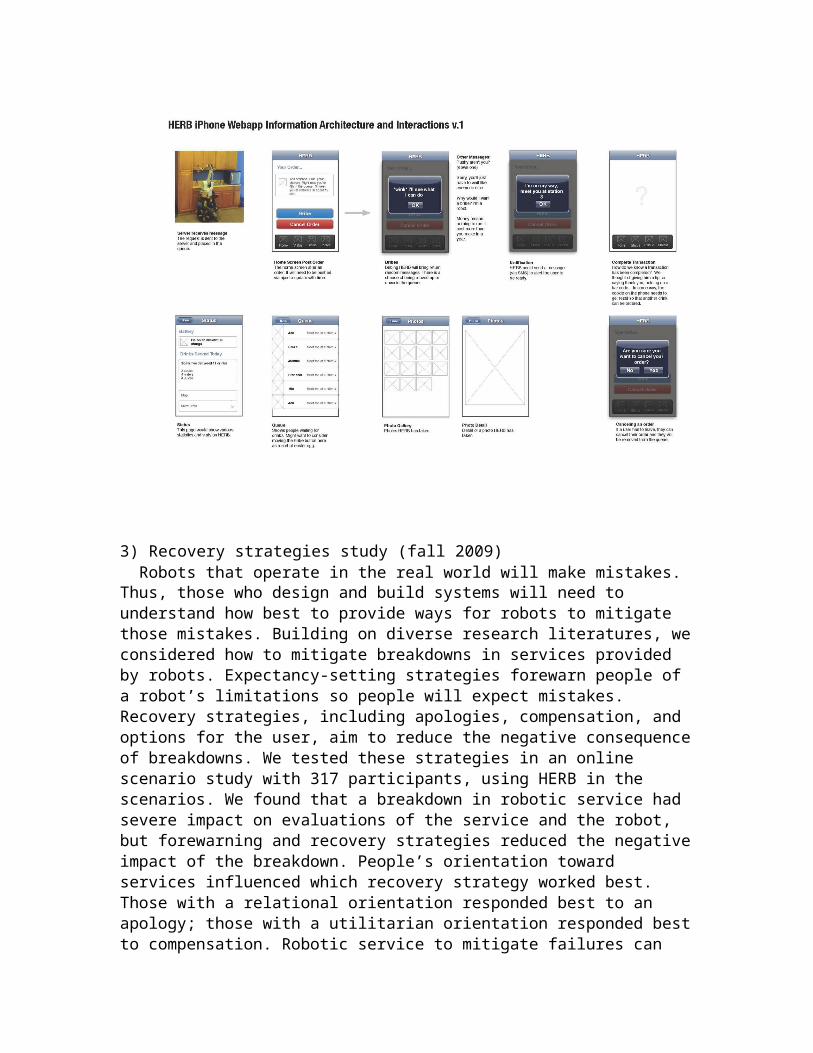
2) iphone application for ordering drinks (fall 2009)We developed an iphone interface for the HERB robot for customers to order drinks or snacks. The phone acts as a simple sensor package that gathers information about a user’s location, order, and preferences over time. Users can order drinks, see the status of the robot, and see the location of their delivery in a queue. Two images of the information architecture are below.

3) Recovery strategies study (fall 2009)Robots that operate in the real world will make mistakes. Thus, those
who design and build systems will need to understand how best to provide ways for robots to mitigate those mistakes. Building on diverse research literatures, we considered how to mitigate breakdowns in services provided by robots. Expectancy-setting strategies forewarn people of a robot’s limitations so people will expect mistakes. Recovery strategies, including apologies, compensation, and options for the user, aim to reduce the negative consequence of breakdowns. We tested these strategies in an online scenario study with 317 participants, using HERB in the scenarios. We found that a breakdown in robotic service had severe impact on evaluations of the service and the robot, but forewarning and recovery strategies reduced the negative impact of the breakdown. People’s orientation toward services influenced which recovery strategy worked best. Those with a relational orientation responded best to an apology; those with a utilitarian orientation responded best to compensation. Robotic service to mitigate failures can rely on these expectation setting (warning a user beforehand that a task will be hard) and recovery strategies. Apologies are the most effective in increasing people to use a robot’s service again. Options were most effective in increasing satisfaction with the robotic service. One implication of this finding is to employ the compensation strategy for a robot that provides a one-time service (e.g., a guide robot in a
tourist area or in a museum). The apology and the options strategies could be used in services where repeated visits are important (e.g., a personal care or a hospital delivery robot). There are also various ways to design for appropriate expectations. One possible design direction would build on the work on robot helpers, which suggests that if a robot gives advice or helps someone, and exhibits some speech disfluencies, then it is perceived as less controlling without detracting from its perceived expertise. These findings suggest ways to gracefully mitigate errors by humanizing the robot and making it seem competent but far from perfect.
Figure. Results of forewarning and compensation strategies.
This paper will be published in HRI 2010:Lee, M.K., Kiesler, S., Forlizzi, J., Srinivasa, S., and Rybski, P. (2010). Gracefully Mitigating Breakdowns in Robotic Services. To be published in Proceedings of HRI10.