chapter 3 fuzzy logic controller based...
TRANSCRIPT

33
CHAPTER 3
FUZZY LOGIC CONTROLLER BASED ACTIVE
SUSPENSION SYSTEM
3.1 INTRODUCTION
Vehicle suspension system is complex and highly nonlinear.
Suspension parameters (suspension deflection, sprung mass velocity, sprung
acceleration) will change when a vehicle rides on various road conditions.
Conventional control strategies depend on accurate system model and cannot
adapt to environmental conditions. Optimal controller discussed in the earlier
chapter is based on the linearized state space model. It suffers from the
limitation of accurate sensing and estimation of state variables for practical
implementation of suspension system. Hence a new controller is proposed to
overcome the above drawback of model dependency. Fuzzy Logic Controller
(FLC) design is discussed in this chapter as it is successful in kinds of
situation like (i) very complex models where understanding is strictly limited
or quite judgmental and (ii) processes where human reasoning, human
perception is inextricably involved.
FLC is used for disturbance rejection control to reduce unwanted
vehicle’s motion in active suspension system (Ting et al (1995)). Nonlinearity
is handled by rules, membership functions and the inference process which
results in improved performance. Literatures point that lot of work has been
done on FLC based active suspension system where the membership
functions are determined by trial and error method. Literatures have already

34
discussed about FLC and binary GA optimization (Kuo and Tzuu-Hseng
(1999)) and hence an alternate algorithm is sought for tuning the FLC
parameters which can overcome the drawback (converge to a local optima
rather than global optima) of GA. Real coded GA is used as it is very popular for
solving real valued optimization problems. Particle Swarm Optimization (PSO) is
a population based stochastic optimization technique and is becoming popular
due to its simplicity of implementation and ability to quickly converge to a
reasonably good solution (Chatterjee et al (2005)). Hence, it is proposed to
optimize the membership functions and scaling factors of FLC by PSO, real
coded GA and compare their performance in terms of ride comfort of the
vehicle suspension system.
3.2 FUZZY LOGIC CONTROL
FLC is based on the general principles of fuzzy set theory and
introduced by Zadeh (1965). Fuzzy set theory provides a means for
representing uncertainties. Fuzzy concept has been widely used in control
system design.
3.2.1 Structure of Fuzzy Logic Controller
Figure 3.1 shows the block diagram of FLC and is composed of the
following four elements
Figure 3.1 Block diagram of a fuzzy logic controller

35
1. A fuzzification interface, which converts controller inputs into
information that the inference mechanism can easily use to
activate and apply rules.
2. A rule-base (a set of If-Then rules), which contains a fuzzy
logic quantification of the expert’s linguistic description of
how to achieve good control.
3. An inference mechanism (also called an “inference engine” or
“fuzzy inference” module), which emulates the expert’s
decision making in interpreting and applying knowledge about
how best to control the plant.
4. A defuzzification interface, which converts the conclusions of
the inference mechanism into actual inputs for the process.
The number of necessary fuzzy sets and their ranges are designed
based upon the experience gained on the process.
3.2.2 GA/PSO Optimized Fuzzy Logic Controller
The controller structure adopted in this study is shown in
Figure 3.2. Suspension deflection and sprung mass velocity are provided as
the inputs to the fuzzy controller and actuator force is taken as the controller
output. GE, GV and GU are the scaling factors of the FLC. Position of the
Vertex (VP) of the triangular membership function to be optimized by
GA/PSO techniques are shown in Figure 3.3. Vp1 to Vp5 refers to the
suspension deflection membership function, Vp6 to Vp10 represents sprung
mass velocity membership function and Vp11 to Vp15 corresponds to output
force membership function. RMS value of the body acceleration is taken as
the performance index as it reflects the ride comfort of the suspension system.
GA/PSO algorithm tunes the scaling factors and the membership functions of
the input and output variables.

36
Figure 3.2 Block diagram of the GA/PSO FLC structure
Figure 3.3 Vertex points in membership functions
3.2.3 Fuzzy Inputs and Output variables
The universe of discourse for the input variables are found by
subjecting the passive suspension to different input conditions and viewing
the maximum and minimum values for each particular input variable. The
universe of discourse for the output variable is chosen by using engineering
judgment and reasonable maximum force for an actuator.

37
The universe of discourse for both the input and output variables are
classified into five fuzzy sets namely Negative Large (NL), Negative Small
(NS), Zero (Z), Positive Small (PS) and Positive Large (PL). Triangular
membership functions are used in the control design as there exist an
appreciable change in the output for slight variations in the input variable and
are shown in Figure 3.4. Both the input and output variables are defined on
the normalized domain of [-1 1].
GE, GV and GU are the scaling factors of suspension deflection,
sprung mass velocity and actuator force respectively. Fuzzy rule base is in the
form of the linguistic variables using the fuzzy conditional statement. It is
composed of the antecedent (If-clause) and the consequence (Then - clause).
For example, “IF suspension deflection is NS and the sprung mass velocity is
PS, THEN the actuator force is ZE ". Each rule is derived from the
characteristic of the active suspension system. Fuzzy rule base is a
combination of all possible control rules and it is summarized in Table 3.1.
Mamdani's minimum operation is used as a fuzzy implication function. Centre
of gravity method is used to defuzzify the inferred output.
Figure 3.4 Membership functions - input/output variables

38
Table 3.1 FLC Rule base
Suspension
Deflection
Sprung MassVelocity
NL NS Z PS PL
NL PL PL PS PS Z
NS PL PS PS Z NS
Z PS PS Z NS NS
Ps PS Z NS NS NL
PL Z NS NS NL NL
3.3 OPTIMIZATION TECHNIQUES
The design of a FLC is not straightforward, because of the
heuristics involved in control rules and membership functions. Currently,
there are no systematic methods for the design of the fuzzy knowledge base or
for the tuning of the fuzzy controller’s parameters. Therefore, the designers
have to devise a fuzzy knowledge base using heuristic methods and
experience. The parameters of a fuzzy control system are tuned by means of a
trial and error method. In this work, scaling factors and membership functions
of the FLC are tuned using GA and PSO techniques. Tunable parameters are
the three scaling factors GE, GV, GU and Vp of the triangular membership
functions.
3.3.1 GA tuning of FLC
Genetic algorithms are adaptive search techniques based on the
“survival of the fittest” biological concept. They can yield an efficient and
effective way for optimization applications by searching for a global
minimum without the need of derivative of a cost function (Lin and Huang

39
(2003)). GA consists of three main operations namely Selection, Crossover
and Mutation and create a new individual which may be better than their
parents. This algorithm repeats for many generations and finally stops while
reaching individuals that represent the optimum solution to the problem. The
flowchart of GA is shown in Figure 3.5.
Figure 3.5 GA flow chart
Due to its effectiveness in searching nonlinear, multi-dimensional
search spaces, GA is applied to the tuning of the scale factors and

40
membership functions of the FLC to ensure optimal control performance at
nominal operating conditions. Since the tuned parameters are real numbers,
real coded GA is applied for evolution. Real coded numbers are combined
together as a string or structure and are called as a chromosome while each
number of the chromosome is a gene. GA starts with a population of n
randomly generated structures, where each structure encodes a solution of the
problem. The cost function used to evaluate the individuals of each generation
is chosen as the RMS of sprung mass acceleration. During the search process
GA looks for the optimal solution which minimizes the cost function. The
overall fitness which the GA aims to maximize is computed as
F= 1000 / (1+J) (3.1)
where J is the cost function. The effectiveness of the technique is shown by
simulation. The GA parameters are given in Table 3.2.
Table 3.2 Parameters of GA algorithm
No. of generations 70
Population size 12
Type of crossover Single point
cross over
mutation rate 0.15
Upper and lower bounds of GE,GV and
GU
[0 5]
Upper and lower bounds of VP1 – VP15 [-1 1]
3.3.2 PSO tuning of FLC
Particle Swarm Optimization (PSO) is a population based
stochastic optimization technique developed by Kennedy and Eberhart (1995)
inspired by the social behaviour of bird flocking or fish schooling. PSO shares

41
many similarities with evolutionary computation techniques. However, unlike
GA, PSO has no evolution operators such as crossover and mutation. In PSO,
the potential solutions, called particles, fly through the problem space by
following the current optimum particles.
The PSO algorithm is becoming popular due to its simplicity of
implementation and ability to quickly converge to a reasonably good solution
(Eberhart and Shi (2001)). PSO has been successfully applied in many areas
like function optimization, artificial neural network and fuzzy logic control
etc. In this algorithm, the individual is called particle and the trajectory of
each individual in the search space is adjusted dynamically by altering the
velocity of each particle, according to its own flying experience and the flying
experience of the other particles in the search space.
Modification of the searching point of a PSO algorithm is shown in
Figure 3.6. Let x and v denote a particle coordinates (position) and its
corresponding flight speed (velocity) in a search space, respectively.
k
iv
1k
iv
1k
ix
pbest
iv
gbesti
pbestik
ix
gbest
iv
Figure 3.6 Modification of a searching point by PSO
x : current position, x : modified position
v : current velocity, v : modified velocity,
v : velocity based on pbest,
v : velocity based on gbest.

42
PSO is initialized with a group of random particles (solutions) and
then searches for optima by updating generations. In every iteration, each
particle is updated by following two "best" values. The first one is the best
solution (fitness) it has achieved so far and is represented as pbest. Another
“best” value is the best solution obtained by any particle in the population.
This is represented as gbest. Each particle knows the best value so far (pbest)
and best value in the group (gbest). The particle tries to modify its position
using the current velocity and the distance from pbest and gbest. The
modified velocity and position of each particle is evaluated using the
following expression (Gaing (2004))
v = w v + c rand (pbest x ) + c rand (gbest x ) (3.2)
x = x + v (3.3)
w - inertia weight parameter
c1, c
2 - weight factors
rand1, rand
2- random number between 0 and 1
v - velocity of particle i in kth
iteration
x - position of particle i in kth
iteration
Suitable selection of w provides a balance between global and local
explorations and it is set according to the following equation
w = wmax
– ((wmax
- wmin
)* t / T) (3.4)
where w is an adjustable parameter between wmax
and wmin
wmax - maximum inertia weight

43
wmin - minimum inertia weight
t - current iteration number
T - maximum number of iterations
Start
Calculate parameters of Fuzzy logic
controller GE,GV and GU
Calculate the fitness
function
Update Velocity, Position
Gbest and Pbest of particles
Calculate Pbest of each particle and
gbest of population
Maximum iteration
number reached ?
Stop
No
Yes
Generate initial populations
Figure 3.7 Flow chart of PSO algorithm
The flowchart of PSO algorithm is shown in Figure 3.7. Generating
initial populations is the first step of PSO. The population is composed of the
particles that are real codes. The corresponding evaluation of a population is
the “fitness function”. The RMS value of sprung mass acceleration is taken
as the performance index and the fitness function is given by Equation (3.1).
44
After the fitness function has been calculated, the fitness value and
the number of the iterations determine the stopping condition. The pbest of
each particle and gbest of population (the best movement of all particles) are
calculated. Updating the velocity, position, gbest and pbest of particles give a
new best position.
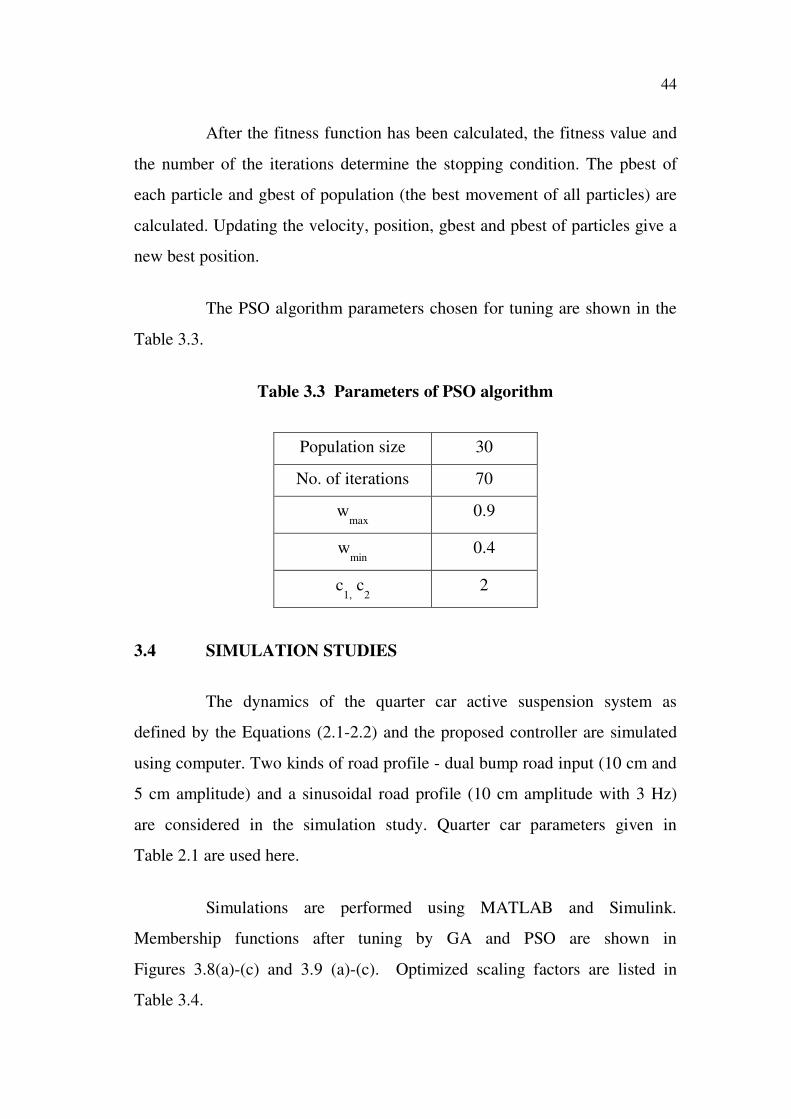
The PSO algorithm parameters chosen for tuning are shown in the
Table 3.3.
Table 3.3 Parameters of PSO algorithm
Population size 30
No. of iterations 70
wmax
0.9
wmin
0.4
c1,
c2
2
3.4 SIMULATION STUDIES
The dynamics of the quarter car active suspension system as
defined by the Equations (2.1-2.2) and the proposed controller are simulated
using computer. Two kinds of road profile - dual bump road input (10 cm and
5 cm amplitude) and a sinusoidal road profile (10 cm amplitude with 3 Hz)
are considered in the simulation study. Quarter car parameters given in
Table 2.1 are used here.
Simulations are performed using MATLAB and Simulink.
Membership functions after tuning by GA and PSO are shown in
Figures 3.8(a)-(c) and 3.9 (a)-(c). Optimized scaling factors are listed in
Table 3.4.

45
Table 3.4 Optimized scaling factors
Optimization
algorithmGE GV GU
GA 1.0387 4.9373 3.9011
PSO 0.1001 4.9813 1.4962
Figure 3.8 (a) GA tuned suspension deflection
Figure 3.8 (b) GA tuned sprung mass velocity
Figure 3.8 (c) GA tuned force

46
Figure 3.9 (a) PSO tuned Suspension deflection
Figure 3.9 (b) PSO tuned Sprung mass velocity
Figure 3.9 (c) PSO tuned force

47
Simulations are conducted for open loop passive, active
suspension with FLC, GA tuned FLC and PSO tuned FLC. All the relevant
parameters and conditions are maintained the same for all the schemes to
ensure a realistic and a fair one-to-one comparison.
Figures 3.10-3.13 illustrates the simulation results for the passive,
FLC, GAFLC and PSOFLC based active suspension system for the bump
road input. Figure 3.10 indicates the reduction in sprung mass displacement
by both PSOFLC and GAFLC. The minimum sprung mass displacement is
exhibited by real coded GA tuned FLC. Figure 3.11 shows that the body
acceleration is reduced by 100% by the GAFLC compared to its counterparts.
Figure 3.12 indicates that the suspension deflection controlled by GAFLC and
PSOFLC exceed the limit of ± 8cm. Figure 3.13 illustrates the road holding
ability maintained by the PSOFLC scheme is superior to that of others. Tyre
deflection exhibited by GAFLC is worst than passive.
Figure 3.10 Sprung mass displacement – bump input

48
Figure 3.11 Sprung mass acceleration – bump input
Figure 3.12 Suspension deflection– bump input
Figure 3.13 Tyre deflection – bump input

49
Figures 3.14-3.17 present the simulation results for the sinusoidal
road input. Figure 3.14 demonstrate that the sprung mass position of the
vehicle body by PSOFLC scheme oscillates around 1cm and its displacement
is completely brought down by the GAFLC. Figure 3.15 shows that the body
acceleration is reduced by 95.8% compared to passive and 86.84% compared
to PSOFLC by the GAFLC. Thus the GAFLC scheme guarantees better ride
comfort. Figure 3.16 indicates that the suspension deflection controlled by
GAFLC and PSOFLC is of same magnitude but smaller than that of passive.
Figure 3.17 illustrates a smaller tyre deflection for PSOFLC and thus the road
holding ability is maintained by the same. The performance of the active
suspension system clearly indicates the superiority of the GAFLC scheme
over its counterparts.
Figure 3.14 Sprung mass displacement – sinusoidal input

50
Figure 3.15 Sprung mass acceleration – sinusoidal input
Figure 3.16 Suspension deflection– sinusoidal input
Figure 3.17 Tyre deflection – sinusoidal input
51
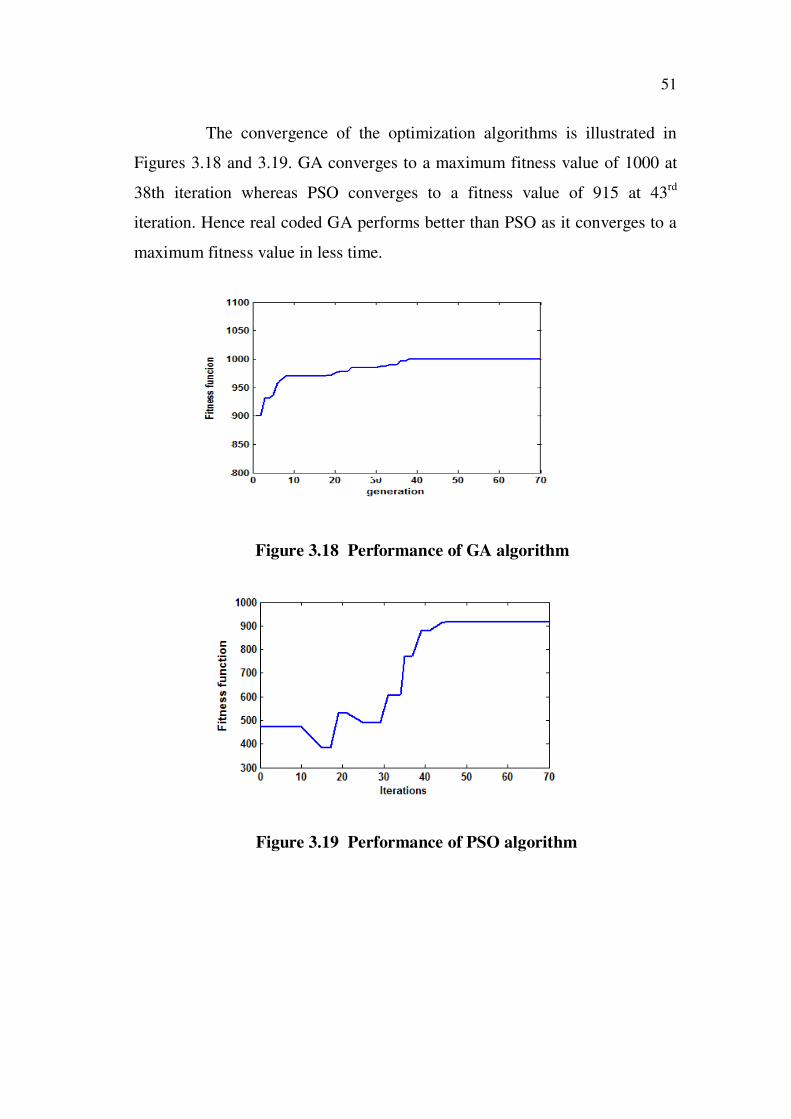
The convergence of the optimization algorithms is illustrated in
Figures 3.18 and 3.19. GA converges to a maximum fitness value of 1000 at
38th iteration whereas PSO converges to a fitness value of 915 at 43rd
iteration. Hence real coded GA performs better than PSO as it converges to a
maximum fitness value in less time.
Figure 3.18 Performance of GA algorithm
Figure 3.19 Performance of PSO algorithm

52
3.4.1 Comparison of GAFLC with PSOFLC
The comparison of the controllers is presented in Table 3.5, which
shows the RMS value of the body acceleration, suspension deflection, body
displacement and tyre deflection. The results show that proposed GAFLC
scheme outperforms the conventional passive, FLC and PSOFLC in providing
desired ride comfort. However road handling is best exhibited by PSOFLC.
Table 3.5 RMS values of the time responses of the Quarter car model
Input Controller
Sprung Mass
Displacement
10-3
(m)
Suspension
Deflection
10-2
(m)
Body
Acceleration
(m/s2)
Tyre
deflection
10-3
(m)
Bump
Input
Passive 19.56 1.776 1.571 2.667
FLC 8.693 1.32 0.9229 2.32
GAFLC2.836 1.505 0 2.776
PSOFLC4.3 1.476 0.2179 2.357
Sinusoidal
Road profile
Passive 25.57 8.307 8.46 11.61
FLC13.57 7.541 4.767 11.32
GAFLC0.7259 7.599 0.3499 11.42
PSOFLC6.798 7.663 2.666 8.149
3.4.2 Power Spectral Density of Sprung Mass Acceleration
Power Spectral Density (PSD) describes how the power of a signal
or time series is distributed with frequency. The power here can be the actual
physical power, or more often can be defined as the squared value of the

53
signal. This instantaneous power (the mean or expected value of which is the
average power) is then given by
P(t) = s(t) (3.5)
for a signal s(t). In the evaluation of vehicle ride quality, the PSD of the
sprung mass acceleration as a function of frequency is of prime interest and is
shown in Figures 3.20 and 3.21 for both inputs.
Figure 3.20 PSD of sprung mass acceleration – bump input
Figure 3.21 PSD of sprung mass acceleration – sinusoidal input

54
Both GA and PSO tuned FLC have significantly suppressed the
acceleration of sprung mass effectively in the low frequency band. It can be
observed from the PSD plot that the sprung mass acceleration has been
brought down within the frequency range of 0.4 Hz to 8 Hz for sinusoidal
input and the entire low frequency region for bump input by the GAFLC
scheme. Both optimization techniques perform much better than passive and
FLC. GAFLC exhibits superior performance especially in the human sensitive
frequency range of 4 Hz to 8 Hz.
Table 3.6 Comparison of ride characteristics
Seok-il and Isik
(1996)
Bump input
(20km/hr)FLC
65 % reduction in Body acceleration.
43% reduction in Tyre Deflection.
Dae and Nizar
(1995)
Sinusoidal with
random noiseFLC
47% reduction in Body acceleration
35% reduction in Tyre Deflection.
Author
Bump input
(20km/hr)
PSOFLC86% reduction in Body acceleration
13.7% reduction in Tyre Deflection
GAFLC100% reduction in Body acceleration
Poor Tyre deflection
FLC41% reduction in Body acceleration
13% reduction in Tyre Deflection
Sinusoidal, 3Hz.
PSOFLC68.5% reduction in Body acceleration
30% reduction in Tyre deflection
GAFLC 95.8 % reduction in Body acceleration
Poor Tyre deflection
FLC 44% reduction in Body acceleration
3% reduction in Tyre deflection
Table 3.6 gives the comparison of ride characteristics for the
proposed PSOFLC with the previous results available for FLC of active
suspension system. In the entire cases quarter car model is used. For similar

55
simulation parameters, ride comfort is enhanced by GAFLC whereas road
handling is improved by the FLC by Seok-il and Isik (1996). For sinusoidal
road profile, ride comfort improved by GAFLC and PSOFLC scheme is
around 48.8% and 12% respectively more than the method by Dae and Nizar
(1995). But the tyre deflection is more pronounced in the case of GAFLC
compared to FLC. This table proves the effectiveness of the GAFLC in
improving the ride comfort of the vehicle suspension system.
3.5 CONCLUSION
This chapter discussed the design of FLC for active suspension
system. Performance of FLC is optimized with GA and PSO algorithms for
enhancement in ride comfort and their performances are compared. From the
simulation results it is obvious that there is an enhancement in the ride-
comfort by the GAFLC based active suspension system. Compared with PSO,
real coded GA algorithm also has significant performance of convergence.
Contrast to full state LQR, proposed FLC applies only two states for control
and attains a better performance.