comparison of different classifiers for automatic target ... · sistemas de raa são utilizados...
TRANSCRIPT

Abstract— Within unmanned aerial vehicles on-going research topics, automatic target recognition is acquiring relevance. This is due to the easiness with which it is possible to acquire such devices. To do so, signal processing and classification techniques could be used. Many signal processing techniques can be used, and the literature usually rely on the use of time-frequency distributions. But, since there is a high computational cost involved, the authors worry about the use of such mathematical techniques, and a low computationally expensive technique is applied to create an automatic target recognition system. To accomplish this, a monostatic K-band radar system is used to send and receive continuous electromagnetic signals, which are processed with fast Fourier transform for feature extraction to, finally, be applied on an artificial neural network and a support vector machine approach. The classification results between both techniques are analyzed and the best solution is selected.
Keywords— Classifiers, Artificial neural networks, Support
Vector Machines, Signal processing, Electromagnetic signals.
I. INTRODUÇÃO 1
ECONHECIMENTO automático de alvos (RAA) está adquirindo relevância dentro dos tópicos atuais de
veículos aéreos não tripulados (VANT, ou drones). Os sistemas de RAA são utilizados não apenas para identificar alvos, mas também para classificá-los como pessoas, veículos, animais e assim por diante. De acordo com Smith [1], isto permite diferentes aplicações, tais como direção automática de veículos, sistemas de segurança e até aplicações militares. De acordo com Molchanov [2], o mercado global de sistemas aéreos não tripulados vai aumentar para até 140 bilhões de dólares até o ano 2023. Este fato, em conjunto com a facilidade em adquirir tais equipamentos, é de grande interesse para o desenvolvimento de sistemas de segurança. Pode-se recordar dois incidentes: primeiro, a perturbação de uma reunião oficial no Grande Hall de Binenhof, na Holanda, em 2010; e a segunda, o voo e queda de um quadricóptero muito próximo à chanceler da Alemanha, Angela Merkel, em 2013.
RAA é uma tarefa complexa, que pode ser resolvida utilizando processamento de sinal de radares e técnicas de classificação. Diferentes técnicas podem ser utilizadas para solucionar tal problema, como técnicas complexas para extração de um vetor de características e classificação. Em contrapartida, tais técnicas podem possuir um alto custo de
V. H. A. Ribeiro, Pontifical Catholic University of Parana
(PUCPR/PPGEPS), [email protected] G. R. Meza, Pontifical Catholic University of Parana (PUCPR/PPGEPS),
[email protected] L. d. S. Coelho, Federal University of Parana (UFPR), Pontifical Catholic
University of Parana (PUCPR/PPGEPS), [email protected]
poder computacional, o que pode impedir o uso em aplicações com menor disponibilidade de poder computacional. Com isto, os autores se preocupam em desenvolver uma solução de baixo custo computacional, que possa ser embarcada em aplicações de baixo consumo, como os próprios VANTs. Técnicas tais como wavelets e a transformada rápida de Fourier (FFT) podem auxiliar no desenvolvimento de algoritmos para extração de características. Porém, em comparação com técnicas mais complexas, menos informações sobre os alvos se tornam disponíveis. Com isto, torna-se necessário o uso de técnicas consagradas de classificação, como redes neurais artificiais (RNAs) e máquinas de vetor de suporte (MVS).
FFT foi utilizada por Jahangir, Ponting & Loghlen [3] para distinguir pedestres, veículos sobre rodas e veículos sobre esteira. Tal técnica também foi utilizada por Javed, Liaqat & Bin Ihsan [4], onde os autores alcançaram um índice de classificação acima de 94% entre pedestres, veículos e ruído.
Uma RNA foi utilizada por Darwish, El-latif, & Morsy [5], após o uso de diferentes técnicas de extração de características. Molchanov et al. [6] também utilizou tal técnica em sua pesquisa, onde a transformada discreta de cosseno foi utilizada para extrair características de alvos terrestres.
MVS foi validado por Du, Wang & Liu [7], onde os autores realizaram a classificação de veículos em movimento e pessoas. Javed, Liaqat & Bin Ihsan [4], onde foi realizada a classificação de pedestres, veículos e ruído; Molchanov et al. [8], onde um índice de classificação acima de 95% foi alcançado para classificação de diferentes tipos de VANTs e pássaros. Além disso, Li, Du & Liu [9] utilizaram a técnica para classificação de veículos terrestres com rodas ou esteiras (lagarta).
Neste contexto, este artigo realiza a comparação de dois modelos de classificadores para a tarefa de RAA. Um kit de desenvolvimento de radar de banda K foi utilizado para coletar dados de três modelos diferentes de VANT, além de ruído ambiente, que são utilizados para treinar dois sistemas de RAA, um com uma RNA e outro com uma MVS.
O restante deste artigo está dividido conforme segue. A seção II descreve a teoria necessária sobre RAA. Após, a seção III apresenta a metodologia aplicada. Em seguida, a seção IV apresenta os resultados para a classificação de três diferentes drones; e, finalmente, as conclusões são apresentadas.
II. REFERENCIAL TEÓRICO
Como o trabalho proposto trata do desenvolvimento de um Sistema de RAA, é importante descrever tais tópicos e seus
R
Comparison of Different Classifiers for Automatic Target Recognition Systems
V. H. A. Ribeiro, G. R. Meza, Member, IEEE, and L. d. S. Coelho
IEEE LATIN AMERICA TRANSACTIONS, VOL. 16, NO. 1, JAN. 2018 13
assuntos relatos, como: radar, processamento de sinais e técnicas de classificação de sinais.
A. Reconhecimento automático de alvos RAA é a área que estuda a habilidade dos algoritmos de
reconhecer alvos em função de informações coletadas de sensores. Tais técnicas podem ser utilizadas para identificar pessoas, máquinas e até mesmo vegetação. Os maiores objetivos da aplicação de RAA, segundo Smith [1], são sistemas de segurança.
Smith [1] também descreve que, para detectar alvos automaticamente, é necessário (1) realizar aquisição do sinal, (2) seu processamento para extração de características e (3) usar um algoritmo de classificação de dados. De acordo com Molchanov [2], para a primeira tarefa, os sistemas mais utilizados são ondas mecânicas e eletromagnéticas. A primeira é composta por sons (acústica), enquanto a última é composta por radiação eletromagnética. A aplicação desenvolvida faz uso de sistemas de radar e, portanto, ondas eletromagnéticas.
Para realizar o processamento de sinais, vários algoritmos podem ser utilizados, tanto no domínio do tempo quanto no domínio da frequência. Tais técnicas são utilizadas para extração do vetor de características do sinal. Nesta etapa, também é possível utilizar filtros de ruído para reduzir a relação sinal ruído.
Após a extração de características, tais dados são alimentados em sistemas de soft computing para realizar a classificação dos sinais. Existem diversas técnicas diferentes, e parte delas é baseada em leis da natureza e traços de inspiração biológica. Tais técnicas necessitam de um processo de aprendizado e, para que possam ser aplicadas, deve ser utilizada uma coleção de dados, conhecida como dados de treinamento.
B. Processamento de sinais de radar Radar, acrônimo de radio detection and ranging (detecção
e telemetria por rádio), são equipamentos eletrônicos que emitem ondas eletromagnéticas em uma determinada largura de banda que, no caso de presença de algum objeto na área observada, são refletidas e retornadas à sua antena. Com tal equipamento, é possível detectar a presença de objetos, suas velocidades e suas distâncias. A tese de Smith [1] é rica em informações sobre os conceitos básicos de sistemas de radar.
De acordo com Chen [10], o efeito Doppler é um fenômeno físico causado pela emissão ou reflexão de ondas a partir de objetos em movimento. As ondas mecânicas e eletromagnéticas, quanto emitidas ou refletidas por objetos em movimento, são recebidas pelo observador com uma frequência diferente do sinal original, tal diferença é conhecida como frequência Doppler, a qual permite a detecção dos objetos e seu movimento. Nos radares monoestáticos, onde transmissor e receptor se encontram no mesmo equipamento, como a velocidade da onda eletromagnética é muito alta (velocidade da luz), a frequência Doppler é aproximada pela equação a seguir dada por:
!" = 2. !! .!"! (1)
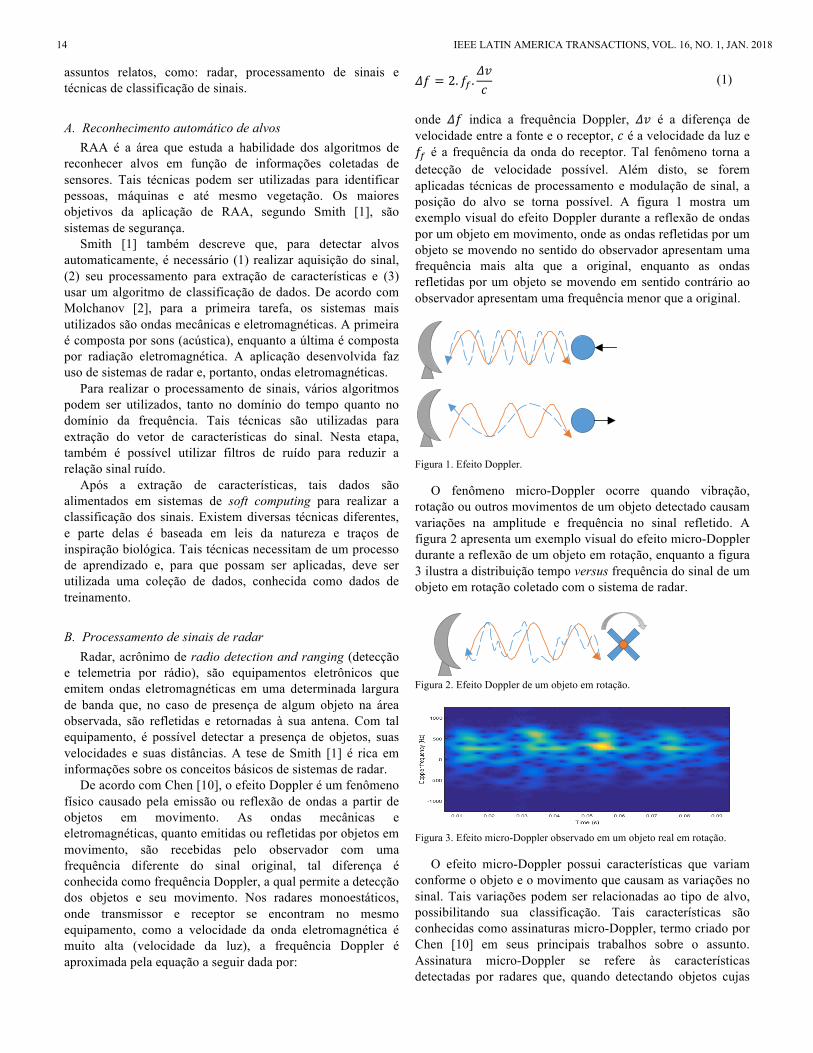
onde !" indica a frequência Doppler, !" é a diferença de velocidade entre a fonte e o receptor, ! é a velocidade da luz e !! é a frequência da onda do receptor. Tal fenômeno torna a detecção de velocidade possível. Além disto, se forem aplicadas técnicas de processamento e modulação de sinal, a posição do alvo se torna possível. A figura 1 mostra um exemplo visual do efeito Doppler durante a reflexão de ondas por um objeto em movimento, onde as ondas refletidas por um objeto se movendo no sentido do observador apresentam uma frequência mais alta que a original, enquanto as ondas refletidas por um objeto se movendo em sentido contrário ao observador apresentam uma frequência menor que a original.
Figura 1. Efeito Doppler.
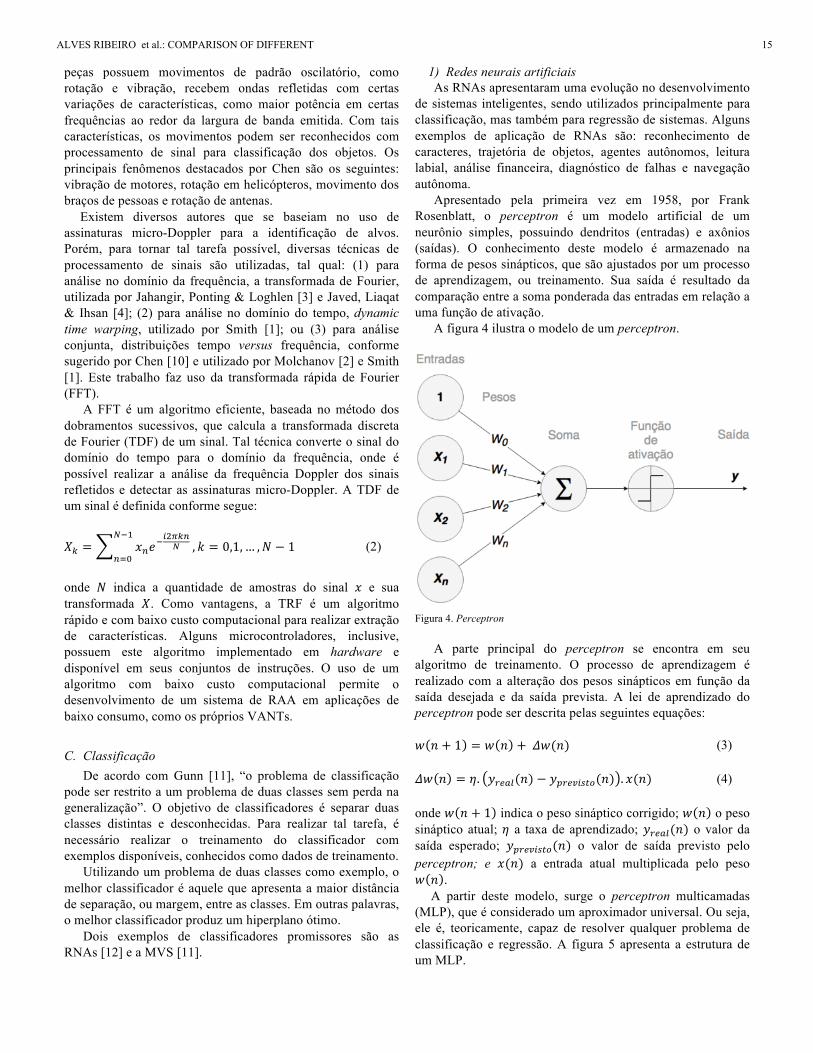
O fenômeno micro-Doppler ocorre quando vibração, rotação ou outros movimentos de um objeto detectado causam variações na amplitude e frequência no sinal refletido. A figura 2 apresenta um exemplo visual do efeito micro-Doppler durante a reflexão de um objeto em rotação, enquanto a figura 3 ilustra a distribuição tempo versus frequência do sinal de um objeto em rotação coletado com o sistema de radar.
Figura 2. Efeito Doppler de um objeto em rotação.
Figura 3. Efeito micro-Doppler observado em um objeto real em rotação.
O efeito micro-Doppler possui características que variam conforme o objeto e o movimento que causam as variações no sinal. Tais variações podem ser relacionadas ao tipo de alvo, possibilitando sua classificação. Tais características são conhecidas como assinaturas micro-Doppler, termo criado por Chen [10] em seus principais trabalhos sobre o assunto. Assinatura micro-Doppler se refere às características detectadas por radares que, quando detectando objetos cujas
14 IEEE LATIN AMERICA TRANSACTIONS, VOL. 16, NO. 1, JAN. 2018
peças possuem movimentos de padrão oscilatório, como rotação e vibração, recebem ondas refletidas com certas variações de características, como maior potência em certas frequências ao redor da largura de banda emitida. Com tais características, os movimentos podem ser reconhecidos com processamento de sinal para classificação dos objetos. Os principais fenômenos destacados por Chen são os seguintes: vibração de motores, rotação em helicópteros, movimento dos braços de pessoas e rotação de antenas.
Existem diversos autores que se baseiam no uso de assinaturas micro-Doppler para a identificação de alvos. Porém, para tornar tal tarefa possível, diversas técnicas de processamento de sinais são utilizadas, tal qual: (1) para análise no domínio da frequência, a transformada de Fourier, utilizada por Jahangir, Ponting & Loghlen [3] e Javed, Liaqat & Ihsan [4]; (2) para análise no domínio do tempo, dynamic time warping, utilizado por Smith [1]; ou (3) para análise conjunta, distribuições tempo versus frequência, conforme sugerido por Chen [10] e utilizado por Molchanov [2] e Smith [1]. Este trabalho faz uso da transformada rápida de Fourier (FFT).
A FFT é um algoritmo eficiente, baseada no método dos dobramentos sucessivos, que calcula a transformada discreta de Fourier (TDF) de um sinal. Tal técnica converte o sinal do domínio do tempo para o domínio da frequência, onde é possível realizar a análise da frequência Doppler dos sinais refletidos e detectar as assinaturas micro-Doppler. A TDF de um sinal é definida conforme segue:
!! = !!!!!!!"#!
!!!
!!!, ! = 0,1,… ,! − 1 (2)
onde ! indica a quantidade de amostras do sinal ! e sua transformada !. Como vantagens, a TRF é um algoritmo rápido e com baixo custo computacional para realizar extração de características. Alguns microcontroladores, inclusive, possuem este algoritmo implementado em hardware e disponível em seus conjuntos de instruções. O uso de um algoritmo com baixo custo computacional permite o desenvolvimento de um sistema de RAA em aplicações de baixo consumo, como os próprios VANTs.
C. Classificação De acordo com Gunn [11], “o problema de classificação
pode ser restrito a um problema de duas classes sem perda na generalização”. O objetivo de classificadores é separar duas classes distintas e desconhecidas. Para realizar tal tarefa, é necessário realizar o treinamento do classificador com exemplos disponíveis, conhecidos como dados de treinamento.
Utilizando um problema de duas classes como exemplo, o melhor classificador é aquele que apresenta a maior distância de separação, ou margem, entre as classes. Em outras palavras, o melhor classificador produz um hiperplano ótimo.
Dois exemplos de classificadores promissores são as RNAs [12] e a MVS [11].
1) Redes neurais artificiais As RNAs apresentaram uma evolução no desenvolvimento
de sistemas inteligentes, sendo utilizados principalmente para classificação, mas também para regressão de sistemas. Alguns exemplos de aplicação de RNAs são: reconhecimento de caracteres, trajetória de objetos, agentes autônomos, leitura labial, análise financeira, diagnóstico de falhas e navegação autônoma.
Apresentado pela primeira vez em 1958, por Frank Rosenblatt, o perceptron é um modelo artificial de um neurônio simples, possuindo dendritos (entradas) e axônios (saídas). O conhecimento deste modelo é armazenado na forma de pesos sinápticos, que são ajustados por um processo de aprendizagem, ou treinamento. Sua saída é resultado da comparação entre a soma ponderada das entradas em relação a uma função de ativação.
A figura 4 ilustra o modelo de um perceptron.
Figura 4. Perceptron
A parte principal do perceptron se encontra em seu
algoritmo de treinamento. O processo de aprendizagem é realizado com a alteração dos pesos sinápticos em função da saída desejada e da saída prevista. A lei de aprendizado do perceptron pode ser descrita pelas seguintes equações:
! ! + 1 = ! ! + !"(!) (3)
!" ! = !. !!"#$(!) − !!"#$%&'((!) . !(!) (4)
onde ! ! + 1 indica o peso sináptico corrigido; ! ! o peso sináptico atual; ! a taxa de aprendizado; !!"#$(!) o valor da saída esperado; !!"#$%&'((!) o valor de saída previsto pelo perceptron; e !(!) a entrada atual multiplicada pelo peso ! ! .
A partir deste modelo, surge o perceptron multicamadas (MLP), que é considerado um aproximador universal. Ou seja, ele é, teoricamente, capaz de resolver qualquer problema de classificação e regressão. A figura 5 apresenta a estrutura de um MLP.
ALVES RIBEIRO et al.: COMPARISON OF DIFFERENT 15

Figura 5. Perceptron multicamadas
O MLP é um conjunto de diversos perceptrons, dispostos em uma camada de entrada, uma ou mais camadas ocultas e uma camada de saída. Neste modelo, os sinais são aplicados na camada de entrada e propagados, camada por camada, até a saída.
Assim como o perceptron, o MLP possui uma técnica para treinamento, conhecida por algoritmo de retropropagação de erro. Neste processo de aprendizagem, o erro encontrado na saída é propagado no sentido oposto às conexões, para corrigir os pesos sinápticos dos perceptrons camada por camada.
2) Máquina de vetor de suporte
MVS é um algoritmo de aprendizado supervisionado que é capaz de resolver problemas lineares e não lineares binários. Ele utiliza dados disponíveis para treinar e adaptar um classificador para otimizar um hiperplano.
Problemas lineares, mostrados na figura 6, são simples de separar. Porém, quando há a necessidade de classificar problemas não lineares, a tarefa se torna mais complexa.
Figura 6. Exemplo de um problema linearmente separável.
Para realizar a separação de classes em um problema não
linear, a MVS mapeia o problema em uma dimensão superior à dimensão original, onde os dados podem, então, ser separados linearmente. As funções Kernel são utilizadas pelas MVS para calcular o produto interno entre os dados. A figura 7 apresenta a aplicação de uma função Kernel em um problema de uma dimensão, onde a MVS monta o hiperplano linear para separação das classes no espaço resultante.
Figura 7. Aplicação de função Kernel para problema não linearmente separável.
A MVS, porém, realiza apenas a classificação binária.
Portanto, para seu uso em um problema de várias classes, é necessário utilizar a técnica de modelo multiclasse por correção de erro de saída. Tal técnica separa o problema em diversos problemas binários, que são resolvidos, cada um, por uma MVS.
III. METODOLOGIA
Este artigo propõe o desenvolvimento de um sistema de RAA. Para tal aplicação, é necessário obter sinais de radar de alvos, utilizar técnicas de processamento de sinais para extração do vetor de características e implementar um classificador robusto. Os dados para este trabalho são obtidos a partir de um kit de desenvolvimento ST200, da empresa RFbeam, conforme apresentado na figura 8.
Figura 8. Kit de desenvolvimento para radar de banda K.
O kit utilizado é composto por: (A) uma antena, que realiza a transmissão e recepção das ondas eletromagnéticas na faixa de frequência da banda K (24 GHz). Tal antena apresenta a saída do sinal recebido na forma complexa, ou seja, em fase e quadratura, e permite a modulação do sinal transmitido. Porém, esta aplicação faz uso de onda de frequência contínua; (B) circuitos de amplificação de 100 dB; e (C) um sistema de aquisição de dados de 16 bits, taxa de aquisição de 250 kHz e comunicação USB, posicionado no inferior no kit.
Para realizar a interface com este radar, uma aplicação foi desenvolvida no ambiente computacional MATLAB R2015a, onde também foram aplicadas técnicas de processamento de sinal e classificação aos dados capturados. A figura 9 apresenta o diagrama de blocos do sistema desenvolvido.
16 IEEE LATIN AMERICA TRANSACTIONS, VOL. 16, NO. 1, JAN. 2018

Figura 9. Diagrama de blocos do sistema desenvolvido.
Ao total, quatro situações foram gravadas, ruído ambiente
e o vôo de três VANTs (Spider e AR.Drone 2.0, da Parrot, e Mikokopter), e os sinais foram separados em conjuntos de treinamento e validação. As amostras utilizadas apresentam duração de 0,55 s e foram capturadas a uma taxa de 41,6 kHz. Ao total, foram gravadas 376 amostras de treinamento e 142 amostras de validação. A figura 10 apresenta o espectrograma dos sinais capturados.
Freq
uênc
ia D
oppl
er (H
z)
Tempo (ms)
Figura 10. Espectrogramas de sinais Doppler para Parrot Spider (1), Parrot AR.Drone 2.0 (2), Mikrokopter (3) e ruído ambiente (4).
Para realizar a extração do vetor de características dos sinais, é utilizada a FFT, para então obter os picos de frequência, que são utilizados como vetor de entrada do classificador.
A partir dos dados coletados, dois classificadores diferentes são aplicados, uma RNA e uma MVS, cujos resultados são analisados.
A RNA utilizada possui 88 entradas, uma camada oculta com 46 perceptrons e 4 saídas. A função de ativação tangente hiperbólica é utilizada na camada oculta, enquanto a função softmax é utilizada na camada de saída. O processo de aprendizagem é realizado pelo algoritmo de retropropagação de erro por gradiente conjugado escalonado. Além disso, é definido um número máximo de 1000 épocas para realizar o cálculo.
A MVS utiliza a função kernel polinomial de terceira ordem e, da mesma forma que a RNA, possui 88 entradas, 4 saídas e um número máximo de 1000 iterações. Porém, como MVS são separadores binários, é utilizado um modelo
multiclasse um-versus-um, onde treinam-se 6 classificadores (um para cada par de classes) e a saída é definida pela classe mais vezes selecionada.
IV. RESULTADOS
Ambos classificadores foram testados com os mesmos dados de entrada, que são 376 conjuntos de treinamento e 142 de validação. Assim, é possível comparar os resultados e decidir pelo uso de RNA ou MVS em aplicações futuras.
As figuras 11 e 12 trazem as matrizes de confusão resultantes para cada classificador, onde é possível verificar a especificidade e a precisão para cada classe, assim como o índice de classificação geral.
Cla
sse
prev
ista
Classe real
Figura 11. Matriz de confusão da RNA.
Cla
sse
prev
ista
Classe real
Figura 12. Matriz de confusão da MVS.
É possível verificar que o índice de classificação geral é muito parecido entre os dois classificadores, a RNA apresenta 85,2%, enquanto a MVS apresenta 86,6%. Além disto, também é possível observar um baixo resultado na precisão do Spider e especificidade do AR.Drone 2.0 em ambos classificadores. Isto ocorre devido à grande similaridade no sinal doppler de ambos VANTs, visto que os dois são compostos por quatro hélices. Já a especificidade e a precisão das demais classes apresentam melhores resultados tanto na RNA quanto na MVS.
MATLAB
Processamento de sinal
Classificador
Radar
VANT
sinal
características ondas
classe
1 2
3 4
ALVES RIBEIRO et al.: COMPARISON OF DIFFERENT 17
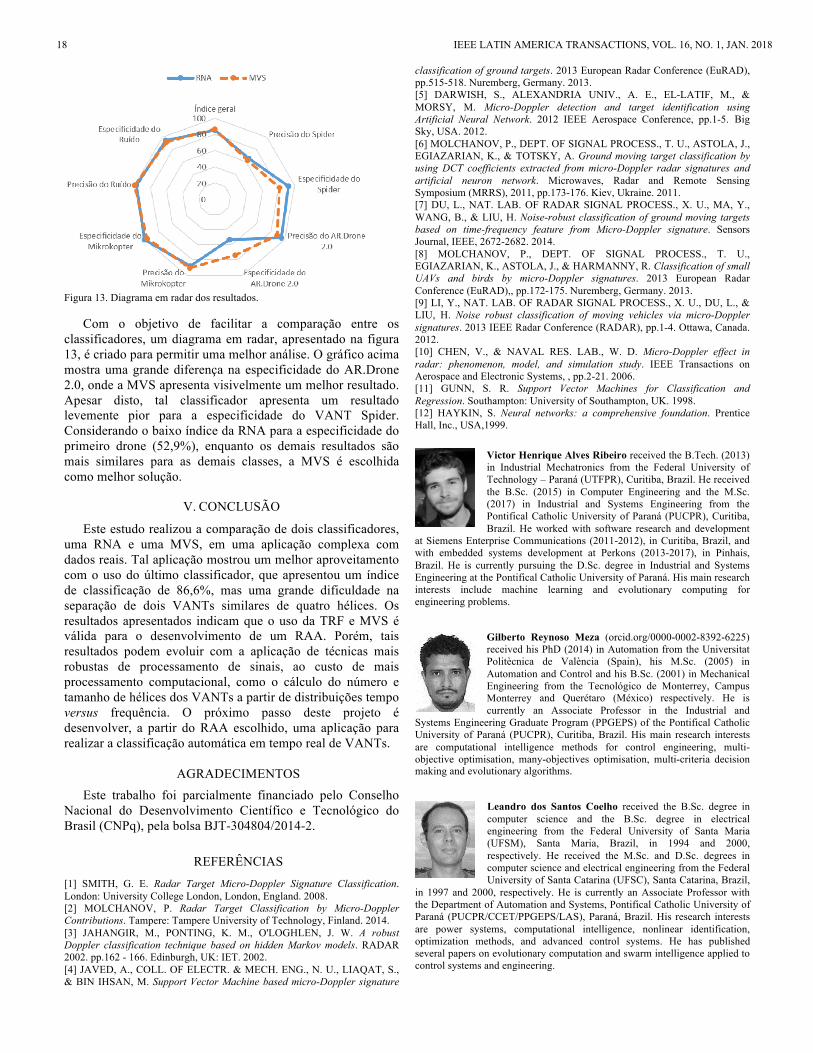
Figura 13. Diagrama em radar dos resultados.
Com o objetivo de facilitar a comparação entre os
classificadores, um diagrama em radar, apresentado na figura 13, é criado para permitir uma melhor análise. O gráfico acima mostra uma grande diferença na especificidade do AR.Drone 2.0, onde a MVS apresenta visivelmente um melhor resultado. Apesar disto, tal classificador apresenta um resultado levemente pior para a especificidade do VANT Spider. Considerando o baixo índice da RNA para a especificidade do primeiro drone (52,9%), enquanto os demais resultados são mais similares para as demais classes, a MVS é escolhida como melhor solução.
V. CONCLUSÃO
Este estudo realizou a comparação de dois classificadores, uma RNA e uma MVS, em uma aplicação complexa com dados reais. Tal aplicação mostrou um melhor aproveitamento com o uso do último classificador, que apresentou um índice de classificação de 86,6%, mas uma grande dificuldade na separação de dois VANTs similares de quatro hélices. Os resultados apresentados indicam que o uso da TRF e MVS é válida para o desenvolvimento de um RAA. Porém, tais resultados podem evoluir com a aplicação de técnicas mais robustas de processamento de sinais, ao custo de mais processamento computacional, como o cálculo do número e tamanho de hélices dos VANTs a partir de distribuições tempo versus frequência. O próximo passo deste projeto é desenvolver, a partir do RAA escolhido, uma aplicação para realizar a classificação automática em tempo real de VANTs.
AGRADECIMENTOS
Este trabalho foi parcialmente financiado pelo Conselho Nacional do Desenvolvimento Científico e Tecnológico do Brasil (CNPq), pela bolsa BJT-304804/2014-2.
REFERÊNCIAS
[1] SMITH, G. E. Radar Target Micro-Doppler Signature Classification. London: University College London, London, England. 2008. [2] MOLCHANOV, P. Radar Target Classification by Micro-Doppler Contributions. Tampere: Tampere University of Technology, Finland. 2014. [3] JAHANGIR, M., PONTING, K. M., O'LOGHLEN, J. W. A robust Doppler classification technique based on hidden Markov models. RADAR 2002. pp.162 - 166. Edinburgh, UK: IET. 2002. [4] JAVED, A., COLL. OF ELECTR. & MECH. ENG., N. U., LIAQAT, S., & BIN IHSAN, M. Support Vector Machine based micro-Doppler signature
classification of ground targets. 2013 European Radar Conference (EuRAD), pp.515-518. Nuremberg, Germany. 2013. [5] DARWISH, S., ALEXANDRIA UNIV., A. E., EL-LATIF, M., & MORSY, M. Micro-Doppler detection and target identification using Artificial Neural Network. 2012 IEEE Aerospace Conference, pp.1-5. Big Sky, USA. 2012. [6] MOLCHANOV, P., DEPT. OF SIGNAL PROCESS., T. U., ASTOLA, J., EGIAZARIAN, K., & TOTSKY, A. Ground moving target classification by using DCT coefficients extracted from micro-Doppler radar signatures and artificial neuron network. Microwaves, Radar and Remote Sensing Symposium (MRRS), 2011, pp.173-176. Kiev, Ukraine. 2011. [7] DU, L., NAT. LAB. OF RADAR SIGNAL PROCESS., X. U., MA, Y., WANG, B., & LIU, H. Noise-robust classification of ground moving targets based on time-frequency feature from Micro-Doppler signature. Sensors Journal, IEEE, 2672-2682. 2014. [8] MOLCHANOV, P., DEPT. OF SIGNAL PROCESS., T. U., EGIAZARIAN, K., ASTOLA, J., & HARMANNY, R. Classification of small UAVs and birds by micro-Doppler signatures. 2013 European Radar Conference (EuRAD),, pp.172-175. Nuremberg, Germany. 2013. [9] LI, Y., NAT. LAB. OF RADAR SIGNAL PROCESS., X. U., DU, L., & LIU, H. Noise robust classification of moving vehicles via micro-Doppler signatures. 2013 IEEE Radar Conference (RADAR), pp.1-4. Ottawa, Canada. 2012. [10] CHEN, V., & NAVAL RES. LAB., W. D. Micro-Doppler effect in radar: phenomenon, model, and simulation study. IEEE Transactions on Aerospace and Electronic Systems, , pp.2-21. 2006. [11] GUNN, S. R. Support Vector Machines for Classification and Regression. Southampton: University of Southampton, UK. 1998. [12] HAYKIN, S. Neural networks: a comprehensive foundation. Prentice Hall, Inc., USA,1999.
Victor Henrique Alves Ribeiro received the B.Tech. (2013) in Industrial Mechatronics from the Federal University of Technology – Paraná (UTFPR), Curitiba, Brazil. He received the B.Sc. (2015) in Computer Engineering and the M.Sc. (2017) in Industrial and Systems Engineering from the Pontifical Catholic University of Paraná (PUCPR), Curitiba, Brazil. He worked with software research and development
at Siemens Enterprise Communications (2011-2012), in Curitiba, Brazil, and with embedded systems development at Perkons (2013-2017), in Pinhais, Brazil. He is currently pursuing the D.Sc. degree in Industrial and Systems Engineering at the Pontifical Catholic University of Paraná. His main research interests include machine learning and evolutionary computing for engineering problems.
Gilberto Reynoso Meza (orcid.org/0000-0002-8392-6225) received his PhD (2014) in Automation from the Universitat Politècnica de València (Spain), his M.Sc. (2005) in Automation and Control and his B.Sc. (2001) in Mechanical Engineering from the Tecnológico de Monterrey, Campus Monterrey and Querétaro (México) respectively. He is currently an Associate Professor in the Industrial and
Systems Engineering Graduate Program (PPGEPS) of the Pontifical Catholic University of Paraná (PUCPR), Curitiba, Brazil. His main research interests are computational intelligence methods for control engineering, multi-objective optimisation, many-objectives optimisation, multi-criteria decision making and evolutionary algorithms.
Leandro dos Santos Coelho received the B.Sc. degree in computer science and the B.Sc. degree in electrical engineering from the Federal University of Santa Maria (UFSM), Santa Maria, Brazil, in 1994 and 2000, respectively. He received the M.Sc. and D.Sc. degrees in computer science and electrical engineering from the Federal University of Santa Catarina (UFSC), Santa Catarina, Brazil,
in 1997 and 2000, respectively. He is currently an Associate Professor with the Department of Automation and Systems, Pontifical Catholic University of Paraná (PUCPR/CCET/PPGEPS/LAS), Paraná, Brazil. His research interests are power systems, computational intelligence, nonlinear identification, optimization methods, and advanced control systems. He has published several papers on evolutionary computation and swarm intelligence applied to control systems and engineering.
18 IEEE LATIN AMERICA TRANSACTIONS, VOL. 16, NO. 1, JAN. 2018