continuous dynamic systems from transients - …dx01/bridge_material/biswas.pdf · discrete methods...
TRANSCRIPT

1
Vanderbilt University/MACS LabBridge Workshop – 03/01
TRANSCEND: Diagnosis ofContinuous Dynamic Systems
from TransientsGautam BiswasMACS Laboratory
Dept. of EECS Vanderbilt University
http://www.vuse.vanderbilt.edu/~biswas
Collaborators:Pieter Mosterman, Eric Manders, Joel Barnett,
Sriram Narasimhan, Philippus Feenstra, Liguo Yu
This project supported by: HP Labs (Agilent Labs), USA, PNC, Japan, the DARPA Software-enabled Control program (#
F33615-99-C-3611), and the NASA-IS program.
Vanderbilt University/MACS LabBridge Workshop – 03/01
Model-Based Diagnosis of Dynamic Systems
• Values: Qualitative vs. Quantitative� qualitative models do not require numerical
parameter values but diagnosis is less precise� computational complexity of qualitative
methods may be less
• Temporal Behavior: Discrete vs. Continuous
� discrete methods may be easier to design but are less precise, coarser
� spurious results
FDI Models: examples
GDEState EstimationParameter Estimation
Quantitative
Sampath, et al.Lunze, et al.
Fault Signatures & TCGs(Mosterman and Biswas)
Qualitative
DiscreteContinuous

2
Vanderbilt University/MACS LabBridge Workshop – 03/01
Qualitative ApproachFault Isolation
• Why Qualitative ?� Accuracy of models -- structural +
difficulty in estimating parameters � Imprecision of real world numeric
models� computational issues, e.g.,
convergence problems
Additional Reasons:
Vanderbilt University/MACS LabBridge Workshop – 03/01
Model-Based Approaches
• Qualitative Constraints� Dvorak and Kuipers � Struss and Dressler, et al.� Panatta and Theseider Dupre
• Topological methods� Trave-Massuyes, et al.� Mosterman and Biswas
Graph based, Compositional� System� Fault Models
Problem with traditional AI modeling approaches: underconstrained
Representative AI approaches

3
Vanderbilt University/MACS LabBridge Workshop – 03/01
Key Issues
• Dynamic, Continuous System• Abrupt Faults (not incipient or intermittent)
In theory, we are looking to characterize step response to abrupt change in a parameter value – called a transient.� Modeling Transients in Qualitative
Framework (Signatures) � Tracking dynamic effects of faults by
Progressive Monitoring
• Adequate Modeling Schemes(parameter to measurement relations)
•Work with Real Data���� Noisy, therefore, statistical techniques for change detection
Vanderbilt University/MACS LabBridge Workshop – 03/01
Key Issues
• Parallels from control theory and systems dynamics -- Loop Analysis (e.g., Mason’s Gain rule) in control theory and Frequency Response Analysis
• Parallels from AI MBD approaches: reasoning in two steps: hypothesis generation and hypothesis refinement
• Differences from traditional FDI approaches – Qualitative Reasoning Framework + Local Analysis + Local to Global Propagation (i.e., consistency checking) over time

4
Vanderbilt University/MACS LabBridge Workshop – 03/01
What are transients?Two Tank System --Response to Faults
Rb2
It seems one measurement is enough but not really….(especially if analysis is qualitative)& discontinuities not reliably detected...
f5:
Faults:Rb1, Rb2, R12
Discontinuity
Faults: C1, C2
Discontinuity
Vanderbilt University/MACS LabBridge Workshop – 03/01
Diagnosis System ArchitectureThe TRANSCEND System
Observer scheme (Kalman Filter) uses numeric simulation model to track behavior – operates till fault occurs
Statistical techniques for symbol generation – activated from point of failure
Diagnosis model - qualitative temporal causal graph

5
Vanderbilt University/MACS LabBridge Workshop – 03/01
Modeling for Diagnosis
• Dynamic, topological models• Need to describe both normal
and faulty system behavior.• Handle both qualitative and
quantitative information, if possible.� Qualitative Information -
magnitude deviations + higher order derivatives. (currently +, 0, -)
• Use Bond Graphs: Systematic modeling language, incorporates physical constraints in system models.
Vanderbilt University/MACS LabBridge Workshop – 03/01
Bond Graph and Temporal Causal Graph
Two-tank System
e2
f1
f5 f8f3
e7
C1 C2
Rb1 R12 Rb2e2
f1
f3 f5 f8
e7
Second OrderSecond OrderSystemSystem
Bond GraphBond GraphTCGTCG

6
Vanderbilt University/MACS LabBridge Workshop – 03/01
Two Tank SystemSteady State Model
e2
f1
f3 f5 f8
e7e2
f1
f5 f8f3
e7
C1 C2
Rb1 R12 Rb2
Vanderbilt University/MACS LabBridge Workshop – 03/01
Diagnosis from Transients
Assumption: Model parameters in TCG correspond to system components.
Fault – model parameter that is deviated from its normal operating value
Abrupt Fault – parameter value change much faster than the measurement sampling rate (modeled as a step change).
Abrupt Faults cause transients in observed measurements.
Goal: Isolate fault as quickly as possible after occurrence of transient.
Two primary tasks:Two primary tasks:1. Reliable detection of transient2. Isolation of fault based on transient
characteristics
7
Vanderbilt University/MACS LabBridge Workshop – 03/01
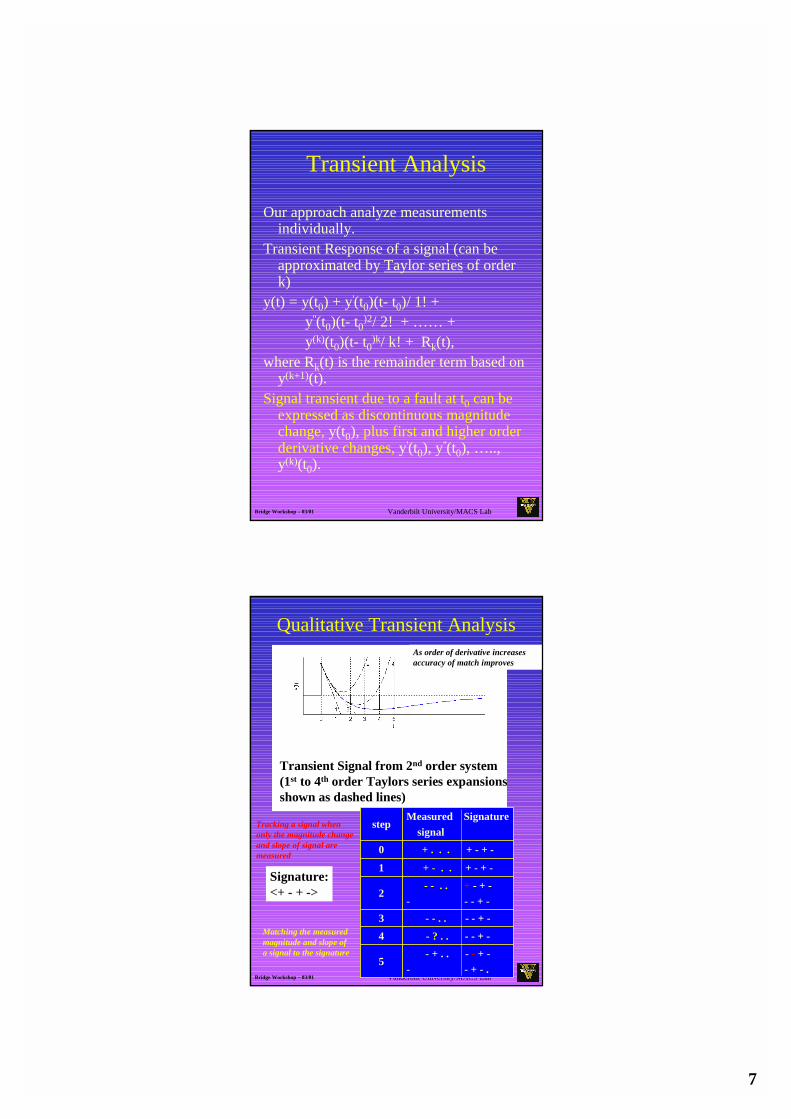
Transient Analysis
Our approach analyze measurements individually.
Transient Response of a signal (can be approximated by Taylor series of order k)
y(t) = y(t0) + y'(t0)(t- t0)/ 1! + y''(t0)(t- t0)2/ 2! + …… +y(k)(t0)(t- t0)k/ k! + Rk(t),
where Rk(t) is the remainder term based on y(k+1)(t).
Signal transient due to a fault at t0 can be expressed as discontinuous magnitude change, y(t0), plus first and higher order derivative changes, y'(t0), y''(t0), ….., y(k)(t0).
Vanderbilt University/MACS LabBridge Workshop – 03/01
Qualitative Transient Analysis
Transient Signal from 2nd order system(1st to 4th order Taylors series expansionsshown as dashed lines)
- + . . - -- + -- - + - .
5
- ? . . - - + -4- - . . - - + -3
- - . . ++ - + -- - - + -
2
+ - . . + - + -1
+ . . . + - + -0
Measured Signature signal
step
As order of derivative increases accuracy of match improves
Tracking a signal whenonly the magnitude changeand slope of signal aremeasured
Signature:<+ <+ -- + + -->>
Matching the measured magnitude and slope of a signal to the signature

8
Vanderbilt University/MACS LabBridge Workshop – 03/01
Fault SignatureSignal feature vector in response to a fault
expressed as a sequence of qualitative derivative values at the point of failure.
Qualitative Fault Signature of order k: fault signature that includes derivatives up to order k.
Assumption – The sampling rate of the measured signals is set to be fast enough so that no qualitative change in the transient dynamics is missed.
Fault Isolation Task:1. Detect transients and hypothesize
possible faults2. Generate fault signatures for all
measurements based on hypothesized faults.
3. Fault Isolation by Progressive Monitoring.
Vanderbilt University/MACS LabBridge Workshop – 03/01
The Diagnosis Process
1. Generate Fault Hypotheses -Backward Propagation
2. Predict Behaviors - Forward PropagationResult: Individual Fault Signatures
3. Prediction to the limit -Steady state analysis
4. Monitoring - compare signatures to observationsSchemes: Progressive Monitoring & Discontinuity Detection

9
Vanderbilt University/MACS LabBridge Workshop – 03/01
Generate Fault Hypotheses
-C2 -R12+Rb2 +Rb1-C1
+
+
-
e4
f3-e6
-e8+f6
+
+
++
-
-
-
--
+e7 C2f8
e7R12
Rb2f7
f5e2e5
e7
+
-
-
-
+
-
-C1
Rb1
f4e2
f2
e3
f5
Possible Faults:
Rb2e2
f1
f5 f8f3
e7
C1 C2
Rb1 R12 Rb2
f1
f3 f5 f8
e2 e7
Vanderbilt University/MACS LabBridge Workshop – 03/01
Prediction by Forward PropagationSignatures
Qualitative Signature: magnitude + first and higher order derivative changes expressed as +,0,- values.
How to generate signatures from TCG ?Temporal links imply integrating edges, affects
derivative of variable on the effect sideStart with 0-order changesEvery integrating edge increases order by one
Rb2+ 2nd Order signature of e7: < 0,+,- >

10
Vanderbilt University/MACS LabBridge Workshop – 03/01
Progressive Monitoringtrack system behavior after failure
• System Behavior Convolutes the Predicted Transient at Time of Failure� dynamically change the signature
Justified by Taylor’s series
Only Model Observable Behavior!
signature1k
0 0 + -
1 + + -
2 + + -
3 + + -
match!
signature2k
0 + - +
no match!
measurek
0 0
1 +
2 +
3 + +
4 + 0
5 + -
6 + - -
1 2 3 54 t6
Vanderbilt University/MACS LabBridge Workshop – 03/01
Monitoring for Dynamic Systems
When to suspend transient analysis.• (a) Compensatory Response• (b) Inverse Response: slope reverses• (c) Reverse Response: (overshoot)
slope and magnitude change sign
(a)
(b)
(c)
Temporal Behavior: Signal Transients

11
Vanderbilt University/MACS LabBridge Workshop – 03/01
Simulated Two Tank System• Using Progressive Monitoring• Rb2
+, e7, f3 measured
For each signal measuring magnitude change,slope, and eventual steady state value
R12 Rb2e2
f1
f5 f8f3
e7
C1 C2
Rb1
f1
f3 f5 f8
e2 e7
Vanderbilt University/MACS LabBridge Workshop – 03/01
(1) ACTUAL => f3: 0 . . . e7: 1 . . . ================C2- => f3: 0 1 -1 e7: 1 -1 1 Rb2+ => f3: 0 0 1 e7: 0 1 -1 R12- => f3: 0 -1 1 e7: 0 1 -1 C1- => f3: 1 -1 1 e7: 0 1 -1 Rb1+ => f3: -1 1 -1 e7: 0 0 1
(2) ACTUAL => f3: 1 1 . . e7: 1 -1 . 1 ============= ===C2- => f3: 0 1 -1 e7: 1 -1 1
(4) ACTUAL => f3: 1 0 . . (-> S) e7: 1 -1 . 1 ======== ========C2 - => f3: 0 1 -1 e7: 1 -1 1
(7) ACTUAL => f3: 1 0 . . (-> S) e7: 1 0 . 1 (-> S)======== ========C2 - => f3: 0 1 -1 e7: 1 -1 1
e7
f3
2
2
4
4
7
7
tf
tf
Simulated Two Tank System
• Using Discontinuity Detection• C2-, f3 and e7 measured
For each signal, measuring - magnitude change,slope, steady state value, initial change discontinuous
e2
f1
f5 f8f3
e7
C1 C2
Rb1
f1
f3 f5 f8
e2 e7R12 Rb2

12
Vanderbilt University/MACS LabBridge Workshop – 03/01
Three Tank Results
Measured Variables are p1, p2 and f12Faults Introduced Faults Identified Steps Taken
C1+ C1+ 6C2+ C2+ 5C3+ C3+ 8
R12+ R12+ 10R23+ R23+, Rb+ 14Rb+ R23+, Rb+ 21
f5 e7==
e3
e5
1dt dt
-1 -1= =
-1 =
=1 = 1e2
e1
e6e4 f4
f3 f7
f6F1 f21
R121
C11C2 f9 e11
e9
1dt
-1
=
-1
= 1 e10e8 f8 f11f101
R231Rb
=
1C3
Vanderbilt University/MACS LabBridge Workshop – 03/01
Secondary Sodium Cooling Loop
(Note: 6th order system)
Bond Graph Model
super heaterevaporator
mainmotor
sodiumoverflowtank
secondarysodium
pump
intermediateheat exchanger
sodium flow stopping valve(normally opened)
sodium flowstopping valve(normally opened)
feedwaterloop
feedwaterloop
CE V
CSH
GY
R4
R5
R3
COFC
R2
e33
R1
Vin
II H X
e19e22
f11
e14
13
Vanderbilt University/MACS LabBridge Workshop – 03/01
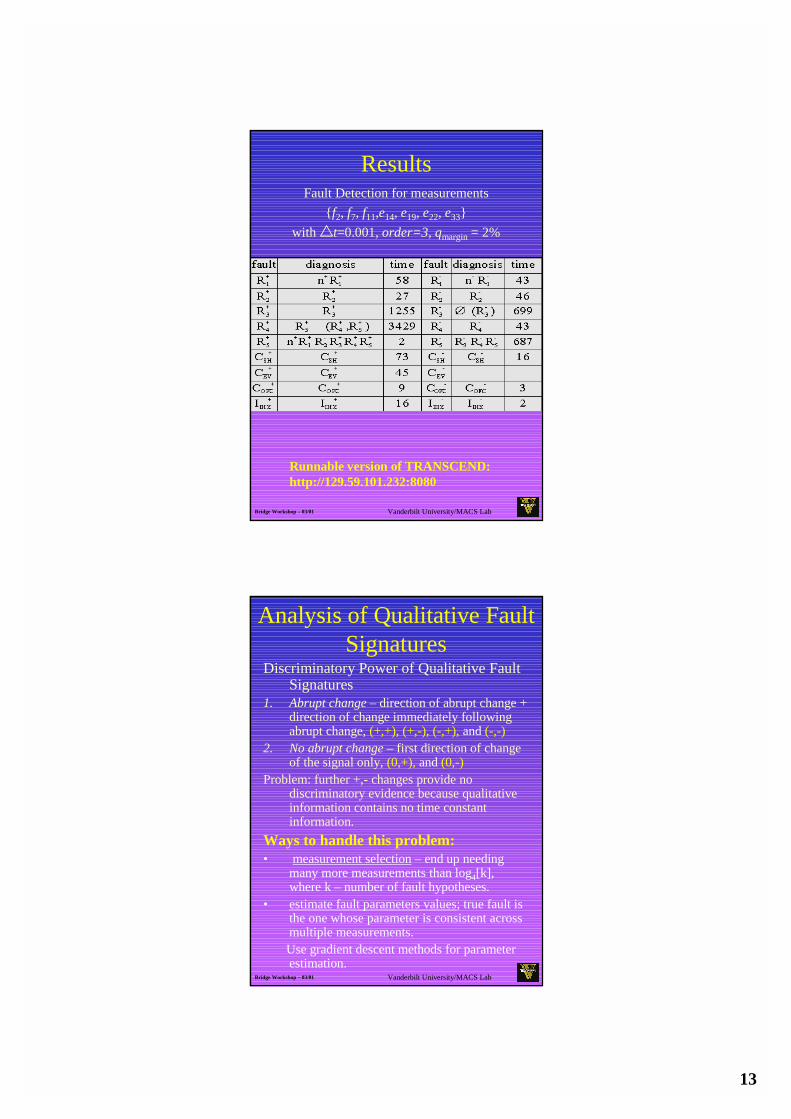
ResultsFault Detection for measurements
{f2, f7, f11,e14, e19, e22, e33}with ����t=0.001, order=3, qmargin = 2%
Runnable version of TRANSCEND: http://129.59.101.232:8080
Vanderbilt University/MACS LabBridge Workshop – 03/01
Analysis of Qualitative Fault Signatures
Discriminatory Power of Qualitative Fault Signatures
1. Abrupt change – direction of abrupt change + direction of change immediately following abrupt change, (+,+), (+,-), (-,+), and (-,-)
2. No abrupt change – first direction of change of the signal only, (0,+), and (0,-)
Problem: further +,- changes provide no discriminatory evidence because qualitative information contains no time constant information.
Ways to handle this problem:• measurement selection – end up needing
many more measurements than log4[k], where k – number of fault hypotheses.
• estimate fault parameters values; true fault is the one whose parameter is consistent across multiple measurements. Use gradient descent methods for parameter estimation.

14
Vanderbilt University/MACS LabBridge Workshop – 03/01
Parameter Estimation
GenerateParameterized
State Equation Model
Parameter Estimation
(System ID methods)Decision
Procedurefh
fh’
• Initiate a fault observer for every singlefault hypothesis, fh -- multiple observers
• Each observer has only one unknownparameter that is unknown -- simplifiedsystem ID methods can be employed
• For true fault, parameter estimate improvesas more measurement samples obtained --should converge to true value
• For other fault hypotheses, parameter estimate should diverge
Vanderbilt University/MACS LabBridge Workshop – 03/01
Extended Parameter Estimation
• Substitute numeric values for all parameter values except faulty parameter.
•Estimate parameter value using standard least square estimation techniques.
• Predict values for all measurements and check for divergence
11
3
2
1
1111111111
5242524232223222
3121312111
3
2
1
00
1
111110
11111111
011111
.
.
.
fC
hhh
RCRCRCRCRC
RCRCRCRCRCRCRCRC
RCRCRCRCRC
h
h
h
+�
���
�
�
−−−+
+−−−−+
+−−−
=
�������
������
�
�

15
Vanderbilt University/MACS LabBridge Workshop – 03/01
Parameter Estimation example
Convergence of predictionestimates for measurementsto 0 for true fault
Divergence of error in estimates for measurements for other hypothesized fault
Vanderbilt University/MACS LabBridge Workshop – 03/01
Conclusions• Developed a comprehensive methodology
for diagnosis based on transient analysis� FDI-based models to capture continuous
dynamics� Derived topological model (TCG) for localized
analysis of faults – dynamics captured as fault signatures
� Progressive Monitoring to match signatures to observations
• Dealing with real signals but processing them qualitatively – required signal to symbol transformation techniques (based on time-frequency analysis)
• Limitations of qualitative reasoning led to combined approach. Reduced set of fault hypotheses spawned fault observers for fault parameter estimation
• Now extended to diagnosis of hybrid systems

16
Vanderbilt University/MACS LabBridge Workshop – 03/01
The TRANSCEND SystemReferences
• P.J. Mosterman and G. Biswas, “Monitoring, Prediction, and fault Isolation in Dynamic Physical Systems, Proc. AAAI-97, pp. 100-105, Providence, RI, July 1997.
• P.J. Mosterman and G. Biswas, “Diagnosis of Continuous Valued Systems in Transient Operating regions,” IEEE Trans. On Systems, Man, and Cybernetics, vol. 29A, no. 6, pp 554-565, Nov. 1999.
• E.J. Manders, et al., “A combined Qualitative-Quantit-• ative for efficient Fault Isolation in Complex Dynamic
Systems, Safeprocess, pp. 1074-1079, 2000.
• E.J. Manders, P.J. Mosterman, and G. Biswas, “Signal to Symbol Transformation for Robust Diagnosis in TRANSCEND,” Tenth Intl. Workshop on Principles of Diagnosis, Loch Awe, Scotland, pp. 155-165, June 1999.
• S. McIlraith, G. Biswas, D. Clancy, and V. Gupta, “Towards Diagnosing Hybrid Systems,” Tenth Intl. Workshop on Principles of Diagnosis, Loch Awe, Scotland, pp. 193-203, June 1999.
• Narasimhan, et al., Safeprocess 2000• Narasimhan and Biswas, DX-01.
Fundamental Approach
Limitations of Qual. Reas./Combined Approach
Signal Analysis – Signal to Symbol Transformation
Hybrid Diagnosis
Vanderbilt University/MACS LabBridge Workshop – 03/01
Wavelet Transform• DWT applied to step function with
Gaussian noise.
• Nine level decomposition
Threshold at level 4 Threshold at level 5
σσσσ = 0.2 σσσσ = 0.4

17
Vanderbilt University/MACS LabBridge Workshop – 03/01
Feature Extraction from Transients
• Signal Magnitude (+,-): simple filter that avoids fluctuations around zero crossings
• Slope estimation:� first order difference operator� finite impulse response (FIR) filter FIR
coefficients: h(n) = (N-1)/2 - n ; n=0,….,N-1
k=0
N-1Differentiator: y(n) = S h(k)x(n-k)