controllers sensors actuatorshomel.vsb.cz/~tum52/publications/controllers-sensors-actuators.pdf ·...
TRANSCRIPT

Controllers sensors
actuators
Jiří Tůma
&
&

Mechanical clocks An escapement is a device in mechanical watches and clocks that transfers energy to the timekeeping element (the "impulse action") and allows the number of its oscillations to be counted (the "locking action"). Verge escapement showing (c) crown wheel, (v) verge, (p,q) pallets.
The verge probably evolved from the mechanism to ring a bell. There has been speculation that Villard de Honnecourt invented the verge escapement in 1237.
The second verge pendulum clock built by Christian Huygens, inventor of the pendulum clock, 1673. Huygens claimed an accuracy of 10 seconds per day.
2 (C) Jiří Tůma, 2018
The oldest working clock in Europe, and quite possibly the world, can be found in an English cathedral. The clock, which is located in Salisbury Cathedral in southern England, dates from about 1386. There was apparently a mechanical clock already working in Milan, Italy, by 1335, but the Salisbury clock is the oldest of its kind known to still be working.

Watt steam engine
A late version of a Watt double-acting steam engine, in the lobby of the Superior Technical School of Industrial Engineers of the UPM (Madrid). Steam engines of this kind propelled the Industrial Revolution in Great Britain and the world
Improving on the design of the 1712 Newcomen engine, the Watt steam engine, developed sporadically from 1763 to 1775, was the next great step in the development of the steam engine.
Watt or fly-ball centrifugal governor
Theory by James Clerk Maxwell, 1868
Steam regulator valve
3 (C) Jiří Tůma, 2018
Centrifugal force
Pivot
Levers

Newcomen engine
(C) Jiří Tůma, 2018 4

Mechanical controllers
Tank fill valve
feedback
Float
Lift arm
Flush valve
Flush toilet
Flush tube
weight
Cooking pot
valve
heating
Pressure regulator
5 (C) Jiří Tůma, 2018
Water level control

On-Off controllers
230 V~
Electric heaters Bimetallic strip
Set point
Output
Two stable positions
Hysteresis
Input
Off - On
Bimetallic switching thermostat
The first electric room thermostat was invented in 1883 by Warren S. Johnson
Boiler thermostat
A thermostat is a component of a control system which senses the temperature
6 (C) Jiří Tůma, 2018

Control systems
Logic control Linear control
7 (C) Jiří Tůma, 2018
Analog controller Digital controller
Controllers Sensors Actuators
A controller is a device, historically using
o mechanical, o hydraulic, o pneumatic o or electronic
techniques often in combination, but more recently in the form of microprocessors or computers

Block diagrams
System Input Output
S1 An input of S1
S2 An output of S1
An input of S2
An output of S2
The output of the System S1 becomes the input of the system S2
tx
ty
tytxtz tx
ty
tytxtz
tx ty
tx ty tz
Special blocks for adding and subtracting a pair of signals
Block Diagrams are a useful and simple method for analyzing a system
S1 ty1
S2 ty2
tx1
tx2
tytyty 21 S1
ty txS2
tz
Serial connection
Parallel connection
8 (C) Jiří Tůma, 2018

Feedback loops
S1 ty tx
S2
9
Positive feedback
tw
tz
+
+ S1
ty tx
S2
Negative feedback
tw
tz
+
-
Feedback signal Feedback signal
Self-regulating mechanisms have existed since antiquity, and the idea of feedback had started to enter economic theory in Britain by the eighteenth century, but it wasn't at that time recognized as a universal abstraction and so didn't have a name. The verb phrase "to feed back", in the sense of returning to an earlier position in a mechanical process, was in use in the US by the 1860s, and in 1909, Nobel laureate Karl Ferdinand Braun used the term "feed-back" as a noun to refer to (undesired) coupling between components of an electronic circuit. By the end of 1912, researchers using early electronic amplifiers (audions) had discovered that deliberately coupling part of the output signal back to the input circuit would boost the amplification (through regeneration), but would also cause the audion to howl or sing. This action of feeding back of the signal from output to input gave rise to the use of the term
"feedback" as a distinct word by 1920. [http://en.wikipedia.org/wiki/Feedback_control]
(C) Jiří Tůma, 2018

A feedback control loop
(C) Jiří Tůma, 2018 10
Comparator
Controller operating
on error e = w - y
tu te
tw
ty
+
-
Feedback loop
tySystem to be controlled
(Plant)
Controller output Measured response Error ywe
twty
tv tv
Disturbance
Desired value
Objectives

Automatic control
Controller Actuator System (plant)
Sensor 1
Sensor 2
Disturbance
Reference System output
Controller
Feesback
CO … Controller Output, control variable, manipulated variable PV … Process Variable, controlled variable, measured variable SP … Set Point, desired value, reference signal, command e = SP – PV (error) measured error
SP e CO PV
Feed-forward Unmeasurable
11 (C) Jiří Tůma, 2018

ISO 3511/1 versus textbooks
Fill valve
Control valve for draining
LCA 071
Level h hSP
H
Tank filled with liquid
S
Level of liquid h
Flow rate Qi
C
Flow rate Qo
hSP
Tank Controller
Feedback
Inflow
Drain
International standard ISO 3511/1 Process measurement control functions and instrumentation – Symbolic representation - Part 1: Basic requirements
Letter code for identification of instrument functions Example: LCA – Level, Control, Alarm, H-high
Textbooks on control theory - Analysis - Design
Closed loop for liquid level control
12 (C) Jiří Tůma, 2018

Piping and instrumentation diagrams
13 (C) Jiří Tůma, 2018
Point of measurement
Instrument (a devices or combination of devices used directly or indirectly to measure, display and/or control a variable)
Panel mounted instrument
Locally mounted instrument
Correcting unit (actuating and correcting elements which adjust the correcting conditions)
Actuating element (that part of the correcting unit which adjusts the correcting elements)
Correcting element (that part of the correcting unit which directly adjusts the value of the correcting conditions)
Alarm (a device which is intended to attract attention to a defined abnormal condition by means of a discrete audible and/or visible signal)
Set value (the value of the controlled condition to which the controller is set)
valve
H Integral manual Automatic Only manual H
H
valve general
general
(P&IDs)

Understanding the symbol system
14 (C) Jiří Tůma, 2018
Actuating element operation
- Control valve opens on failure of actuating energy
- Control valve closes on failure of actuating energy
- Control valve retains position on failure of actuating energy
Types of line
Instrument signal line
Direction of flowing information
Line used to delineate the plant
Position of function identifying letters
LCA
071
LCA
071
LCA
071
H
Instrument
Panel mounting instrument
Panel in control room
Local panel
Letter code Loop number
Crossing and junctions
(Alarm)

Letter code for identification of instrument functions
(C) Jiří Tůma, 2018 15
1 2 3 4 First letter Succeeding letter
Measured or initiating variable Modifier Display or output function
A Alarm B
C Controlling D Density Difference E All electric variables F Flow rate Ratio G Gauging, position or length H Hand (manually initiated) operated
I Indicating J Scan K Time or time programe L Level M Moisture or humidity N User’ choice O User’ choice P Pressure or vacuum Q Quality, for example
– analysis concentration conductivity
Integrate or totalize
Integrating or summating
R Nuclear radiation Recording
S Speed or frequency Switching
T Temperature Transmitting U Multivariable
V Viscosity
W Weight or force X Unclassified variables
Y User’ choice Z Emergency or safety acting

Process control
16 (C) Jiří Tůma, 2018
Flow rate Q2
Flow rate Q0
LCA 051
Level
Flow rate Q1
QIC 052
pH
FRQ 054
TIR 053
H
M A B
ISO 3511-1:1977, Process measurement control functions and instrumentation - Symbolic representation - Part 1: Basic requirements
TC
058
Product Steam
FC
057 Feed M
External
circulation
product
FC FC
Fuel Air
FY
1/λ
RSP
FY
FY >
<
SP
Low
selected
RSP High
selected
Fuel/air control
pH and level control
Coolant inlet
M
TC
TT Reactant A
Reactant B Product
Coolant outlet
Reactor (Exothermic Reaction in CSTR)
CSTR Continuous Stirred-Tank Reactor
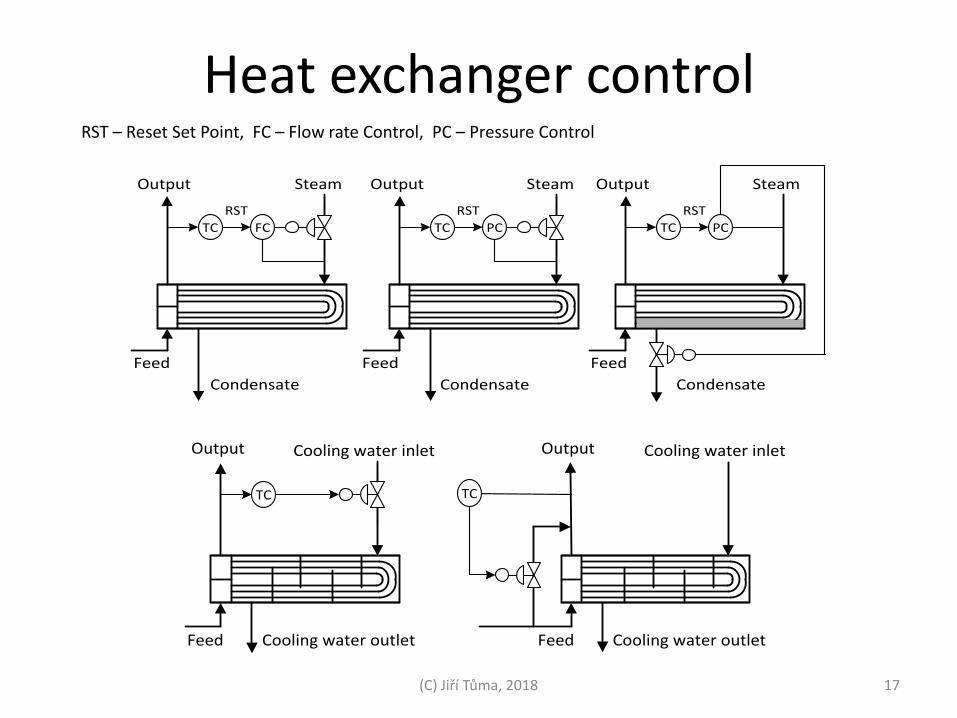
Heat exchanger control
17 (C) Jiří Tůma, 2018
RST – Reset Set Point, FC – Flow rate Control, PC – Pressure Control
Condensate
Steam
Feed
FC
Output
RST
TC
Condensate
Steam
Feed
PC
Output
TC
Condensate
Steam
PC
Output
TC
Feed
RSTRST
Cooling water outlet
Cooling water inlet
Feed
Output
TC
Cooling water outlet
Cooling water inlet
Feed
Output
TC

Standard ISO 3511-1 vs. 3511-2
(C) Jiří Tůma, 2018 18
FI 3
Impulse
pipe instruments
3 valves display
ISO 3511-1
Flow rate, Indicating Flow rate, Indication - details
ISO 3511-2
Piping system
Orifice
Flow rate measurement with display at process control console

Standard ISO 3511-2
(C) Jiří Tůma, 2018 19
Diaphragm actuator Rotary motor actuator
Solenoid actuator Diaphragm actuator, pressure-balanced
Solenoid actuator with reset
Piston actuator Orifice plate Venturi tube
Nozzle Variable area meter Turbine meter Volume meter
M
H
FQ
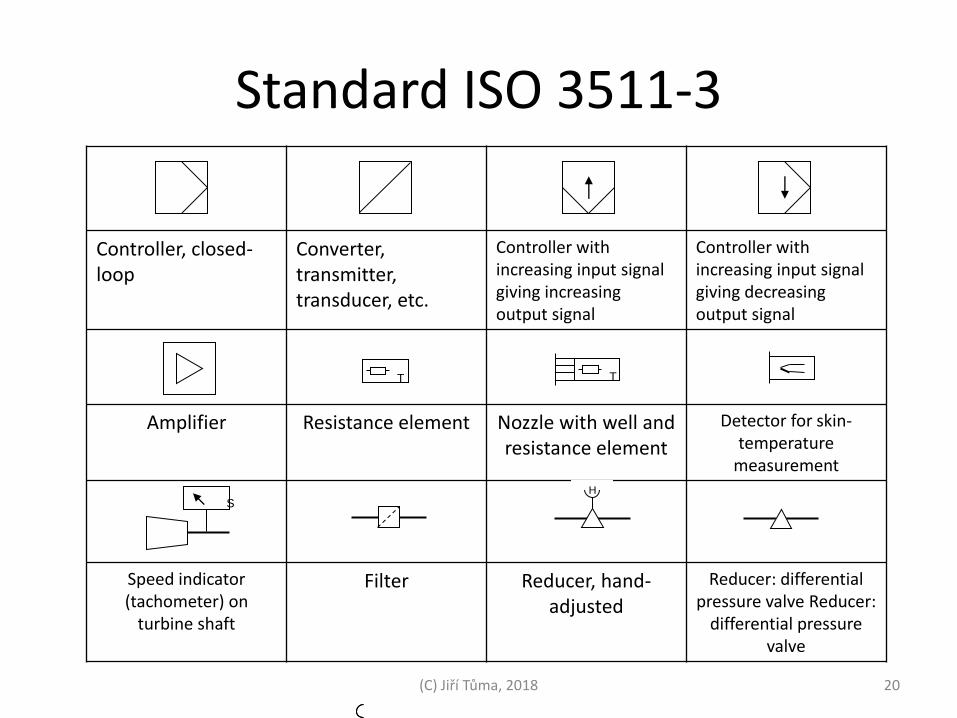
Standard ISO 3511-3
(C) Jiří Tůma, 2018 20
Controller, closed-loop
Converter, transmitter, transducer, etc.
Controller with increasing input signal giving increasing output signal
Controller with increasing input signal giving decreasing output signal
Amplifier Resistance element Nozzle with well and resistance element
Detector for skin-temperature
measurement
Speed indicator (tachometer) on
turbine shaft
Filter Reducer, hand-adjusted
Reducer: differential pressure valve Reducer:
differential pressure valve
H
S
T T
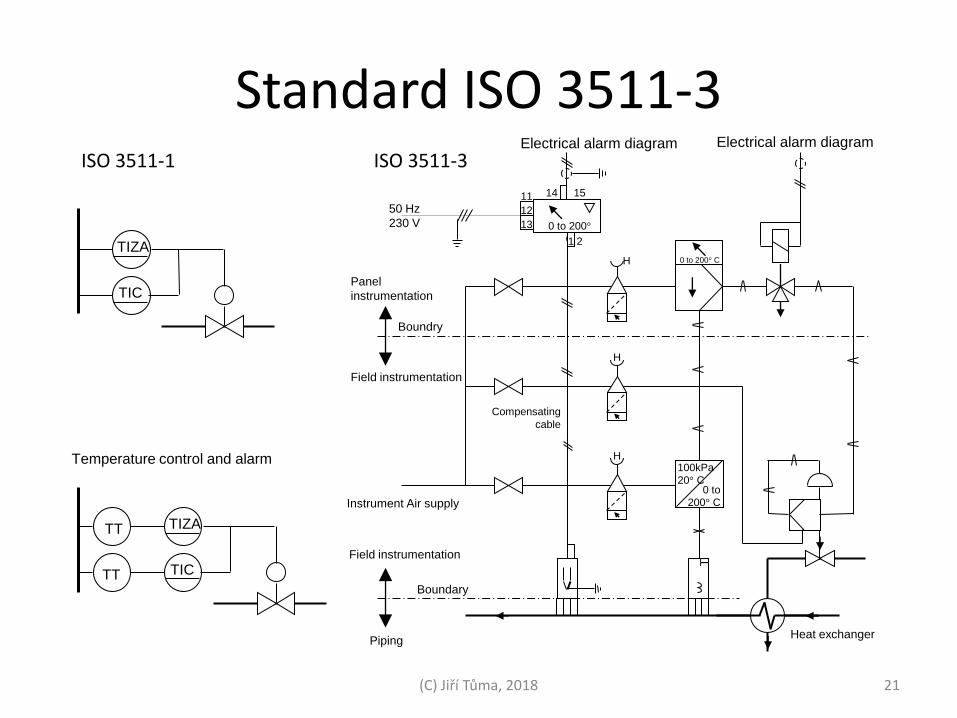
Standard ISO 3511-3
(C) Jiří Tůma, 2018 21
H
H
H
0 to 200° C
100kPa
20° C 0 to
200° C
T
0 to 200°
C
Electrical alarm diagram
Heat exchanger
Boundary
Boundry
Piping
Field instrumentation
Field instrumentation
Panel
instrumentation
Instrument Air supply
50 Hz
230 V
Compensating
cable
1 2
14 15 11
12
13
Electrical alarm diagram
TIZA
TIC
TIZA
TIC
TT
TT
Temperature control and alarm
ISO 3511-1 ISO 3511-3

FESTO Company
(C) Jiří Tůma, 2018 22
PI flow diagram for filling level control (open and closed loop control and process protection)

ISO Standards
(C) Jiří Tůma, 2018 23
ISO 3511-1:1977 Process measurement control functions and instrumentation -- Symbolic representation -- Part 1: Basic requirements
ISO 3511-2:1984 Process measurement control functions and instrumentation -- Symbolic representation -- Part 2: Extension of basic requirements
SO 3511-3:1984 Process measurement control functions and instrumentation -- Symbolic representation -- Part 3: Detailed symbols for instrument interconnection diagrams
ISO 3511-4:1985 Industrial process measurement control functions and instrumentation -- Symbolic representation -- Part 4: Basic symbols for process computer, interface, and shared display/control functions
This part of ISO 3511 specifies instrument symbols for use on interconnection diagrams used for the design, installation, and maintenance of process measurement and control systems. These detailed symbols are not normally intended for drawings that use the functional symbols given in ISO 3511/1 and ISO 3511/2. However, the symbols specified in this part of ISO 3511 show, by detailing the components, the external connections between units of equipment. Information on the internal connections in units is not normally included, but references to the appropriate circuit or wiring diagrams may be provided.

Servomechanism or position control
Position feedback
Velocity feedback Motor
RP RV Controller output
RP … position controller RV … velocity controller
Ball screw
Ball screw
Linear encoder
Servomechanism for positioning of the table of a machine tool
24 (C) Jiří Tůma, 2018
Reference velocity
Reference position

Digital control systems
Controller Amplifier Actuator Plant
S1
S2
Disturbance
w
Process variable e u
v
y DAC
ADC
ADC
Analog Digital
SP CO PV
ADC analog to digital convertor
DAC digital to analog convertor
25 (C) Jiří Tůma, 2018

Digital control systems
PrinterVideo Display
Unit
InterfacingHardware
Analog Control Subsytem
Alarming Functions
Supervisory Control Computer
Data Storage Acquisition
System
...
26 (C) Jiří Tůma, 2018
Controllers
o mechanical o hydraulic o pneumatic o electronic

PID controllers
Parallel connection
e u
1
I
D
+
+
+ P
The PID controller three-term control: the proportional, the integral and derivative values, denoted P, I, and D,
P I D
The controller output u(t) is a weighted sum of P, I and D:
kP … proportional gain TI … integrating time constant TD … derivative time constant
ID TT 4
28 (C) Jiří Tůma, 2018
Proportional action Integral action Derivative action
u(t) … controller output, control variable, manipulated variable
e(t) … error
Parameters:
t
teTe
Ttektu D
I
Pd
dd
1

29
Properties of transfer functions The transfer function of the linear time-invariant system is a ratio of two polynomials of the complex variable s is as follows
rdenominato
numerator
...
...
011
1
011
1
sN
sM
asasas
bsbsbsb
sU
sY
tuL
tyLsG
nn
n
mm
mm
nnn
nn
mmm
mm
pspspsasasassN
zszszsbbsbsbsbsM
211
1
1
2101
1
10
...
...
If the roots of the polynomial numerator are designated by and the polynomial denominator are designated by then
mzzz ,,, 21
nppp ,,, 21
mzzz ,,, 21
nppp ,,, 21 … are called zeros of the transfer function … are called poles of the transfer function
If the parameters of the transfer function are real then the poles and zeros are complex conjugate
Complex plane
Re
Im
1z1p
2p
3p 2z
(C) Jiří Tůma, 2014
a factored form in which the polynomial is written as a product of irreducible polynomials and a constant

Domains
(C) Jiří Tůma, 2014 30
Time domain
s-plane domain
Complex plane
Re
Im
1z1p
2p
3p 2z
Imaginary axis
Real axis
t 0
TtT
kty exp
The Laplace transform converts integral and differential equations into algebraic equations
0
dexp tsttftfLsF
Presentation of functions in the time domain means to show them as the function of time
Example
The time functions can be transformed into the s-plane domain with the use of Laplace transform. It concerns only the deterministic functions and the mathematical operations. The time functions are converted into the functions of the complex variable s.
A tool for demonstration positions of zeros and poles of the complex functions is a complex plane.

31
Elementary transfer functions
Static
0ksU
sYsG
k0 is a gain, TI is an integral time constant and TD is a derivative time constant.
Integral
ITssU
sYsG
1
Derivative
DTssU
sYsG
The first order system
10
0
Ts
k
sU
sYsG
The first order system
11 21
0
TsTs
k
sU
sYsG
12 0
22
0
0
sTsT
k
sU
sYsG
Linear transfer functions
(without overshot) (with overshot)
tukty 0
t
I
uT
ty0
d1
t
tuTty D
d
d
tuktytyT 00 tuktytyTTtyTT 02121 tuktytyTtyT 00
2
0 2
Time delay
dTtuty
dsTe
sU
sYsG
(C) Jiří Tůma, 2014

32
Step and impulse responses
input signal x(t) Linear system
output signal y(t)
Consider a linear time-invariant system with an input x(t) and an output y(t) as follows
Let the input signal be a Dirac delta function x(t) = δ(t), X(s) = 1, then
sGsXsGsY - an impulse response of a linear system
Let the input signal be a step function x(t) = 1, X(s) = 1 / s, then
ssGsXsGsY - a step response of a linear system
(forcing function) (response of the system)
thtgsGL 1
t
gthssGL0
1 d
The impulse response is defined for x(t) = δ(t), X(s) = 1
The step response is defined for x(t) = 1, t >= 0 and x(t) = 0, t < 0, X(s) = 1 / s
t 0
1
ttx
t 0
1
ttx
1
(Heaviside) step function
Dirac delta function
(C) Jiří Tůma, 2014

PID controllers – cont’
t
teTe
Ttektu D
I
Pd
dd
1
The PID controller three-term control:
Heuristically, these values can be interpreted in terms of time: P depends on the present error, I on the accumulation of past errors, and D is a prediction of future errors, based on current rate of change.
t
teTteT
t
teteTte DDD
d
d
The derivative term
The prediction of future errors Approximation using a Taylor series
sT
sTk
sE
sUsG D
I
PPID
11
The Laplace transform of the transfer function of the PID controller:
33 (C) Jiří Tůma, 2018

PID controllers – interacting parameters Parallel connection
e u
P
I
D
+
+
+
Transfer function of parallel connection
sT
sTksT
sTksG D
I
PD
I
PPID
11
1 *
*
e u P
D I
+ +
+ +
Serial connection
sT
sTksT
sTk
sE
sUsG D
I
PD
I
PPID
111
11 *
*
*
where PDDIPI kTTTkT **,
******** ,,1 DIDIDDIIIDP TTTTTTTTTTk
where
Transfer function of serial connection
e u kP
+
+
sTI1
1
Transfer function of a PI controller
sT
k
sT
ksGI
P
I
PPI
11
1
11
1Positive feedback
PI controller
34 (C) Jiří Tůma, 2018
Proportional mode
(C) Jiří Tůma, 2018 35
Proportional Band (PB) is another way of representing the same information and answers this question: PB = Δ Input (% Span) For 100% Δ Output
PROPORTIONAL ACTION
The proportional mode is used to set the basic gain value of the controller. The setting for the proportional mode may be expressed as either: 1. Proportional Gain 2. Proportional Band
PROPORTIONAL GAIN
In electronic controllers, proportional action is typically expressed as
proportional gain. Proportional Gain (Kc) answers the question: "What is the percentage change of the controller output relative to the percentage change in controller input?" Proportional Gain is expressed as: Gain, (Kc) = Δ Output% / Δ Input %
PROPORTIONAL BAND
https://www.youtube.com/watch?v=2Nrgms0cKs4

Step response of I and D terms of PID
Step function
t
0
1
e
t
0
1
e
t
0
1
e Step function Step function Step function
System t th
Step response
Dynamic system
t
0
1
(Heaviside) step function t
sTsE
sUsG
I
I
1
sTsE
sUsG DD
0
0
,1
TT
sT
sT
sE
sUsG
D
DPD
t
0
u
t
0
u
t
0
u Dirac function
Integrator output Ideal differentiator output Differentiator output
T0
36 (C) Jiří Tůma, 2018

Responses of PID, PD and PI
t
0
1
t
0
e
u
t
0
1
e
t
0
1
e Step function Step function Step function
sT
sTksG D
I
PPID
11
PID output
Ideal PID
Pkt
u PI output
Pk
sTksG
I
PPI
11
t
0
u PD output
Ideal PD
Pk
sTksG DPPD 1
dB
ω 0
ω
-π/2
0 phase
dB
ω 0
ω
π/2 phase
dB
ω 0
ω
-π/2
0
phase
0
+π/2
IT
1
DT
1
DT
1IT
1
37
0
(C) Jiří Tůma, 2018
Filtered derivative PD
Filtered derivative PID
Ideal PID Ideal PD
10 102 103 10 102 103
10 102 103

Phase lead and lag compensator
ps
zs
sE
sUsG lagLead
/
Transfer function of a compensator is as follows
Phase Lead compensator Phase Lag compensator
dB ω
0
ω
-π/2
0 phase
dB ω
0
ω
π/2 phase
0
where z is the zero and p is the pole of the transfer function. The pole and zero are both typically negative. In a lead compensator, the pole is left of the zero in the complex plane |p| > |z| , while in a lag compensator |z| > |p|
U1 U0
U0 R1
R0
C0 U1 U0
U0
R0 C1
R1
1000
00
1
0
1
1
RCRCs
RsC
sU
sU
38 (C) Jiří Tůma, 2018
10 102 103 10 102 103

Phase lead–lag compensator
21
21
psps
zszs
sE
sUsG lagLead
Transfer function of a compensator is as follows
Phase lead-lag compensator
dB ω
0
ω
π/2 phase
0
where z1 and z2 are the zeros and p1 and p2 are the poles of the transfer function. Typically |p 1| > |z 1|
> |z2| > |p2|
U1 U0
U0 R1
C1 R0
C0
-π/2
101100
1100
11100
00
1
0
11
11
11
1
RsCRsCRsC
RsCRsC
RsCRsCR
sCR
sU
sU
39 (C) Jiří Tůma, 2018
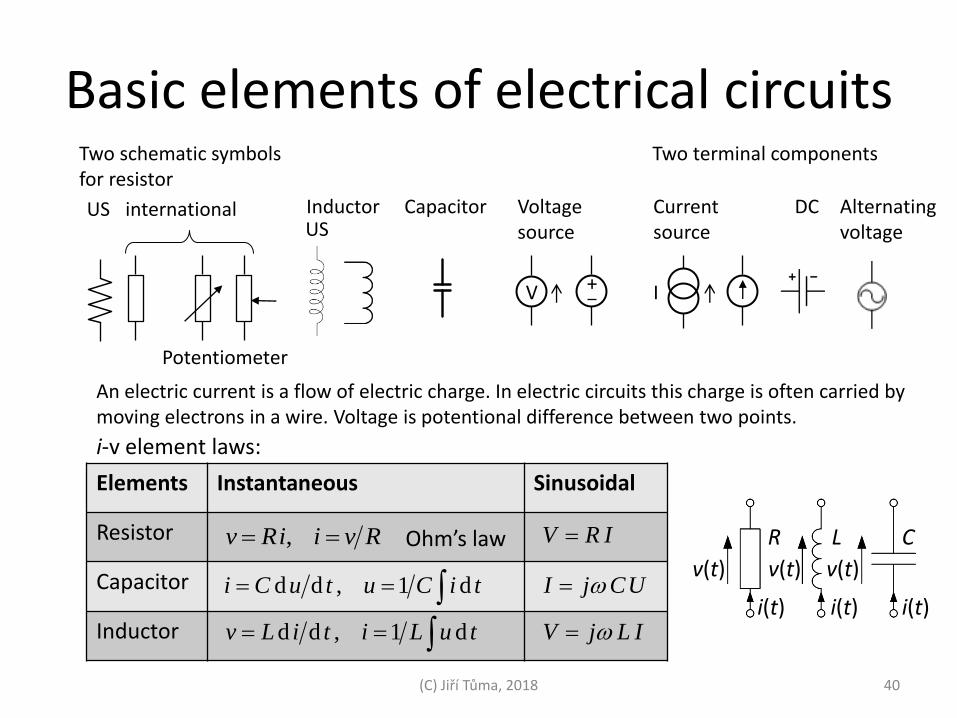
Basic elements of electrical circuits
(C) Jiří Tůma, 2018 40
Two schematic symbols for resistor
Inductor Capacitor
Elements Instantaneous Sinusoidal
Resistor
Capacitor
Inductor
RviiRv ,
tiCutuCi d1,dd
tuLitiLv d1,dd
IRV
UCjI
ILjV
Potentiometer
US international Voltage source
Current source
V I
DC Alternating voltage
i(t) i(t) i(t)
v(t) v(t) v(t)
R L C
US
An electric current is a flow of electric charge. In electric circuits this charge is often carried by moving electrons in a wire. Voltage is potentional difference between two points.
+
i-v element laws:
Two terminal components
Ohm’s law

Amplifiers and filters
(C) Jiří Tůma, 2018 41
RCjjV
jV
in
out
1
1
Amplifier
Vin Vout
Low pass filter High pass filter
RCj
RCj
jV
jV
in
out
1
Analog passive filters Digital filters
inoutout ykyky 11

Operational amplifiers
42 (C) Jiří Tůma, 2018
ΔV V0 = A ΔV
Operational amplifier (“opamp”)
high gain … A (105)
An operational amplifier (op-amp) is a DC-coupled high-gain electronic voltage amplifier with a differential input and, usually, a single-ended output.
V1
V0
Voltage follower (Unity Buffer Amplifier)
11
1
10
10
010
AVV
AAVV
VVAV
ΔV V0 = A ΔV
R1
R0
V1
I
1
0
1
0
0
0
1
1
R
R
V
V
R
V
R
VI
Inverting amplifier
10 VV
AFor
- High input impedance - Low output impedance
Impedance transformer
Virtual ground

Electronic PID controllers
ΔV V0 = A ΔV
R1
C0
V1
I Inverting integrator
t
VCR
Vt
VC
R
VI
0
1
01
000
1
1 1 d
d
d
43 (C) Jiří Tůma, 2018
ΔV V0 = A ΔV
C1
R0
V1
I
Ideal inverting differentiator
t
VCRV
R
V
t
VCI
d
d
d
d 1100
0
011
V0
C1
R0
V1 Filtr
Inverting differentiator

Electronic PID controllers – cont’
DIP
DIPDIP
VVVV
R
V
R
V
R
V
R
VIIII
0
0
0
R1P
R0P
V1
R1I
C0I
C1D
R0D
R
R0
I
R
R
V0
IP
ID II
VP
VI
vD
Addition of three signals
44 (C) Jiří Tůma, 2018
PID controller with interaction
V1 V0
Phase lead-lag controller
V1 V0
V0
Voltage follower
Passive PID controller

Switched-Capacitor Resistor Equivalent
45 (C) Jiří Tůma, 2018
Switched capacitors are replacing resistors. They also allow continuous variation of the resistance by changing the switching frequency. This circuit is composed of a capacitor and analog switches and can be realized in MOS technology (which is based on MOS transistors and capacitors with capacitance in range of farads) with low costs. The switched capacitors is used for tunable filters and tunable and for amplifiers, voltage-to-frequency converters, programmable capacitor arrays, oscillators, amplifiers.
Since the clock signal for the second MOSFET is inverted, one transistor is turned on (its resistance is around 1-10kΩ), and the second is turned off (its resistance is of the order of 1012 kΩ). Therefore MOSFETs can be considered as switches.
C
Clock1 Clock2 = Clock1
Vin Vout
Change of the capacitor charge
If the switching occurs N times per a second, then the amount of charge in the capacitor per the time interval of the Δt length, which is an electric current, is
The resistor equivalent of the circuit can be calculated as
where is a clock frequency. tNfclock

Switched-Capacitor Resistor Equivalent
46 (C) Jiří Tůma, 2018
C
Clock1= 1 Clock2 = Clock1 = 0
Vin Vout
C
Clock1= 0 Clock2 = Clock1 = 1
Vin Vout

Parasitic-Sensitive integrator
47 (C) Jiří Tůma, 2018
The resistance increases with decreasing capacitance or with decreasing switching frequency
Cs
Cfb
Vout Vin
Clock
Resistor
Inverted Clock
tNfclock
Often switched capacitor circuits are used to provide accurate voltage gain and integration by switching a sampled capacitor onto an op-amp with a capacitor Cfb in feedback. One of the earliest of these circuits is the parasitic-Sensitive integrator developed by the Czech engineer Bedrich Hosticka. The time constant of the integrator is adjustable through changes frequency of the clock signal
Req
Switched Capacitor Circuits, Swarthmore College course notes, accessed 2009-05-02.
Parasitic from fringing capacitors and bottom-plate to substrate
C1
Cp1 Cp2
12 %20 CCp
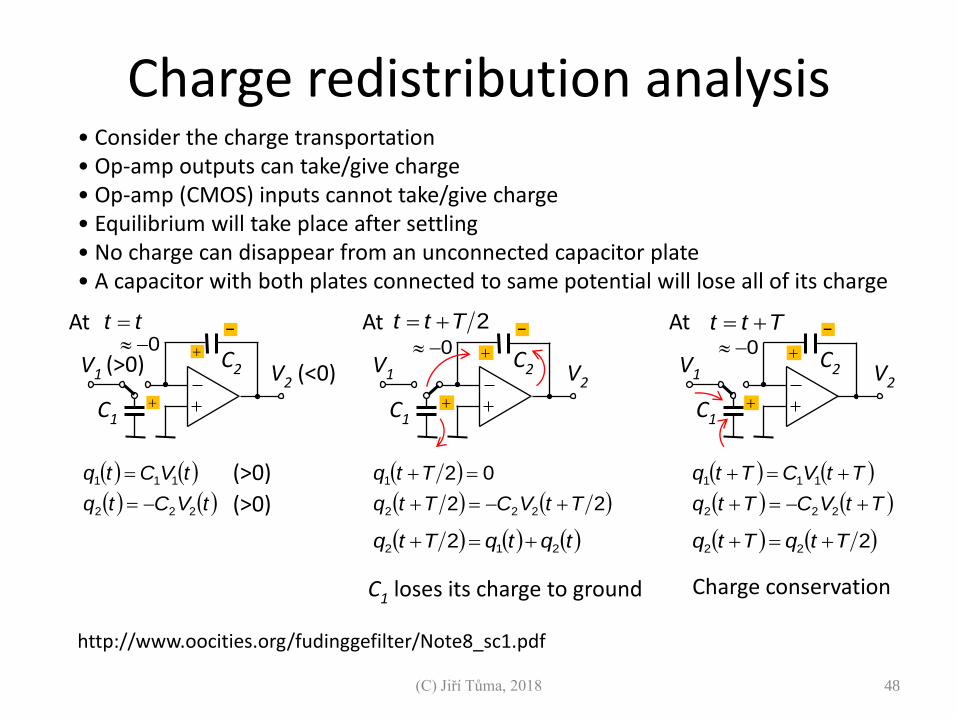
Charge redistribution analysis
48 (C) Jiří Tůma, 2018
http://www.oocities.org/fudinggefilter/Note8_sc1.pdf
• Consider the charge transportation • Op-amp outputs can take/give charge • Op-amp (CMOS) inputs cannot take/give charge • Equilibrium will take place after settling • No charge can disappear from an unconnected capacitor plate • A capacitor with both plates connected to same potential will lose all of its charge
C1
C2 V2 (<0) V1
tVCtq
tVCtq
222
111
C1
C2 V2 V1
2Ttt
22
02
222
1
TtVCTtq
Ttq
tt At At
tqtqTtq 212 2
C1
C2 V2 V1
Ttt
TtVCTtq
TtVCTtq
222
111
At
222 TtqTtq
C1 loses its charge to ground Charge conservation
(>0)
(>0)
(>0) 0 0 0

Transfer Function
49 (C) Jiří Tůma, 2018
http://www.oocities.org/fudinggefilter/Note8_sc1.pdf
Inverting Discrete-time Integrator
tqtqTtqTtq 2122 2
tVCtVCTtVC 221122
zVCzzVC
zVCzVCzzVC
1122
221122
1
1
1
2
1
2
1
1
2
11
1
z
z
C
C
zC
C
zV
zVzH
Z-transform
Transfer function
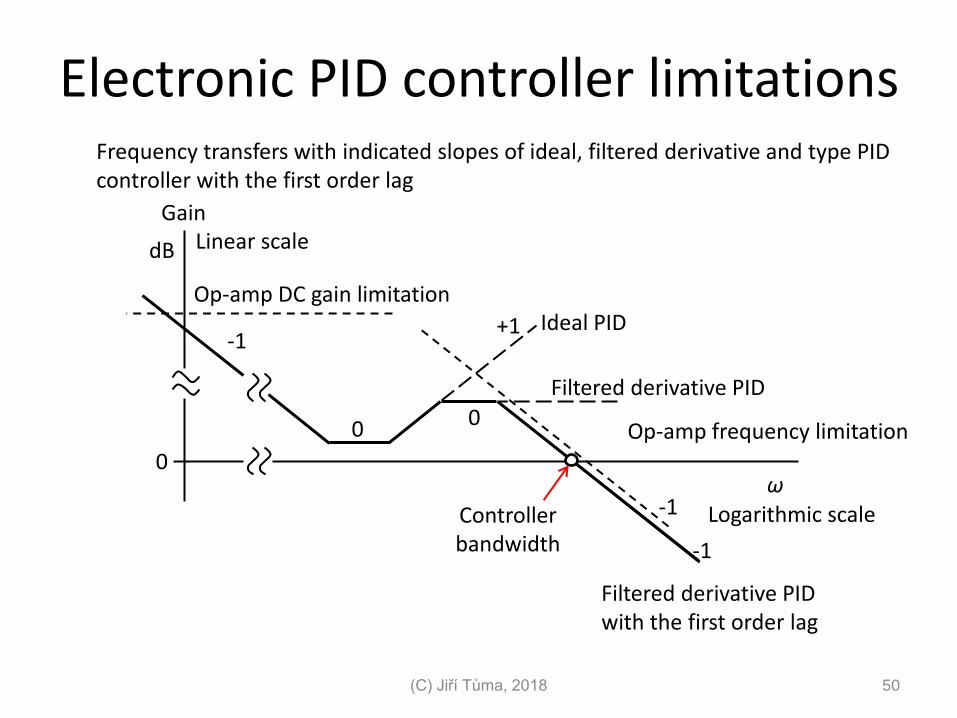
Electronic PID controller limitations
50 (C) Jiří Tůma, 2018
ω 0
dB
Op-amp DC gain limitation
Ideal PID
Filtered derivative PID
Op-amp frequency limitation
Controller bandwidth
Gain
Frequency transfers with indicated slopes of ideal, filtered derivative and type PID controller with the first order lag
-1
-1
-1
0 0
+1
Filtered derivative PID with the first order lag
Logarithmic scale
Linear scale

Programmable logic controllers - PLC
51 (C) Jiří Tůma, 2018
Programable Logic Controller
+24V
relays valves lamps, lights
Input binary signals
PLC acts as an electric switchboard which is a device that directs electricity from one source to another.
Output binary signals
E
Logic control
Linear control
PID control – 1 or 2 closed loops including frequency converter

PID controllers for PLC
P
I
D
+ P Slew Time Clamp Dead Band
CO Polarisation
Bias
SP
PV
-
P
I
D
+ P Slew Time Clamp Dead Band
CO Polarisation
Bias
SP
PV
-
Block diagram of PIDIND
Block diagram of PIDISA
CO … Controller Output, control variable, manipulated variable PV … Process Variable, controlled variable, measured variable SP … Set Point, desired value, reference signal, command Bias … a value added to the controller output.
Bias can be used as the offset for Feed-forward Control
52 (C) Jiří Tůma, 2018

Digital PID controllers
Biast
ektekekCO DIP d
dd
t
ektekekCO DIP
d
ddddd
21211 kekekeT
kkTekkekekkCOkCO D
IP
21211 kPVkPVkPVT
kkTekkekekkCOkCO D
IP
21211 kPVkPVkPVT
kkTekkPVkPVkkCOkCO D
IP
CO … Controller Output PV … Process Variable SP … Set Point e = SP – PV (error) measured error Bias … a value added to the controller output
Type A
Type B
Type C
PID controller
After differentiation
Parameters kP … proportional gain kI … integral gain kD … derivative gain T … sample period k … discrete time
T
keke
t
e
kekee
kCOkCOCO
1
d
d
1d
1d
53 (C) Jiří Tůma, 2018

PID controllers as a part of PLC Features • Bumpless transition between manual and automatic
mode • Bias can be used as the offset for Feed-forward Control
When PID is active, declared Sample Period is compared with elapsed time from the previous algorithm execution. If it is greater then successive iteration is carried out. If calculated CV is outside the range Lower Output Clamp − Upper Output Clamp, or it changes faster than declared Minimum Slew Time then CV is limited to appropriate value and value in buffer memory in integral term is adjusted (anti-reset windup).
Calculated CV is also stored in Manual Command register as well as in Internal CV register, assuming PID is in AUTO mode. If the block is in manual mode (Boolean 1 on the input MAN), then CV is equal to the value in Manual Command register, which can be incremented (1 on UP) or decremented (1 on DN). In manual mode the output value can be written manually from a programmer as well.
54 (C) Jiří Tůma, 2018

Distributed control systems
Process Transmitters and Actuators
Data Highway(Shared Communication Facilities)
......
DataStorage Unit
HostComputer
System Consoles
PLC
4-20 mA
LocalConsole
LocalControl
Unit
4-20 mA
LocalControl
Unit
LocalConsole
55 (C) Jiří Tůma, 2018

Industrial buses
Plant Optimization
.................
Smart Sensors
Smart ControlValves and Controllers
LocalArea
Network
Smart Sensors
Smart ControlValves and Controllers
LocalArea
Network
H1 Fieldbus Network H1 Fieldbus Network
H1 Fieldbus H1 Fieldbus
Data Storage
PLCs
High Speed Ethernet
56 (C) Jiří Tůma, 2018

Hydraulic and pneumatic controllers

Flapper – nozzle principle
Δx
p0
p
nozzle
flapper
p0
p
Δx
cca 0,02 mm
Air supply
output pressure
gap
p
pressure setting
p0 p
ress
ure
ve
ssel
spring bellows
pneumatic actuator
Nozzle-flapper
Schematic arrangement of the flapper – nozzle system
fulcrum
An equivalent of a simple operational amplifier (“opamp”) circuits with analogous pneumatic mechanisms
nozzle
Air pressure p
orifice
Pressure vs. width of gap
58 (C) Jiří Tůma, 2018
Approximate linear range

Hydraulic valves
p0 p1
p2
p0
p1 p2 Δx
Δp = p1 - p2
Δx Jet Pipe
Double-nozzle Flapper
Pressure difference
Δx
Receiver block
Fluid Supply
Chamber A
Leakage
path
Supply pressure
Δx > 0
Valve
spindle
Δx = 0
Chamber B
Lands Under
Lapped
Valve
Over
Lapped
Valve
Δx – valve position
Δx
Zero
Lapped
Valve
Control flow
Under Lapped Valve Zero Lapped Valve
Over Lapped Valve
A servo consists of a spool (two lands connected by a rod) and an outer sleeve (sometimes called a bushing) with flow ports drilled in the sleeve. The position of the spool determines the flow areas and hence controls the amount of flow through the valve. Cut-away drawing …
Servo lapping
Orifice
59
Spool valves
http://www.youtube.com/watch?v=U5iXiRxBcJo&list=PL8245A490BE8A8C9D
(C) Jiří Tůma, 2018
Valve types
60
https://www.qualityhydraulics.com/blog/what-proportional-valve/
(C) Jiří Tůma, 2018
Directional Control Valves Traditional hydraulic equipment designs used directional control valves almost exclusively. These valves are used to control flow direction. It can be referred to as either “switching” or “bang-bang” valves. Proportional Valves For solving the more complex circuits, proportional valves have been developed. These valves allow infinite positioning of spools, thus providing infinitely adjustable flow volumes. Either stroke-controlled or force-controlled solenoids are used to achieve the infinite positioning of spools. The proportional valve is any continuously variable, electrically modulated, directional control valve with more than 3% center overlap.
Servo Valves The third type of hydraulic directional control technology is the servo valve. The servo valves were first used in the 1940s. These valves operate with very high accuracy, very high repeatability, very low hysteresis, and very high frequency response. The servo valves are used in conjunction with more sophisticated electronics and closed loop systems.

Proportional valves
61
http://www.iranfluidpower.com/pdf/All%20hydraulics/Proportional%20Valves.pdf
(C) Jiří Tůma, 2018
Armature
x = 0
Coil
Coil
Pole piece
Force
x = xmax
Force Force
Working Stroke Working Stroke
Conventional solenoid Proportional solenoid
Current
Current
Spring Balance Positiom Feedback
Fa Fa Fk
i i
V ka
Vin
Vf
+V -V
Feedback Voltage
x x
F F
F
Control current Control Voltage
Force Balance Position
Sensor
Spring
Flux Paths
2
2
00
2n
lx
ii
f
AF
e
M
Wire turns
Force

Symbols in a hydraulic schematic 1
62 (C) Jiří Tůma, 2018
Continuous line - for flow line Dashed line - for pilot, drain
Envelope - for dashes around two or morecomponent symbols
Large Circle - pump, motor
Small Circle - measuring devices
Semi-circle - rotary actuator
Flow restriction (affected by viscosity)
Spring
Lines
Circles Square
One square - pressure control function
Two or three adjacent squares - directional control
Triangle Solid - Direction of Hydraulic Fluid Flow
Open - Direction of Pneumatic flow
Diamond
Diamond - Fluid conditioner (filter, separator, lubricator, heat exchanger)
Miscellaneous Symbols
Pump and Compressor Symbols
Unidirectional
Bidirectional
Compressor Symbol
Fixed Displacement Hydraulic Pump Symbol
Bidirectional
Semi-circle - rotary actuator
Variable Displacement Hydraulic Pump Symbols
Adjustable output flow – Needle Valve
Orifice (un-affected by viskosity)

Symbols in a hydraulic schematic 2
63 (C) Jiří Tůma, 2018
Cylinders Hydraulic Motor Symbols
Unidirectional Fixed Displacement Hydraulic Pump Symbol Bidirectional
Unidirectional Variable Displacement Hydraulic Pump Symbol
Bidirectional
Pneumatic Motor Symbols
Unidirectional
Bidirectional
Rotary Actuator Symbols
Hydraulic
Pneumatic
Single acting (returned by external force)
Double acting single rod end
Double acting double rod end
Single acting (returned by spring force)
Cylinders with Cushions Symbols
Single fixed cushion
Double fixed cushion

Symbols in a hydraulic schematic 3
2 position – 2 way valve
2 position – 3 way valve
2 position – 4 way valve
3 position – 4 way valve Closed Center Valve
Valve capable infinite positioning (indicated by horizontal lines drawn parallel to the envelope
Valves Check valve symbol-free flow one direction
On-Off manually shunt off
Manual Valve Control
Spring
Manual general symbol
Hydraulic actuated pilot
Pressure relief valve
Reservoir open to atmosphere
64 (C) Jiří Tůma, 2018
Open Center Valve
Push Button
Lever
Foot pedal
Mechanical Valve Control
Roller
Pilot Operation (uses pressure to actuate valve)
Solenoid (the one side's winding shown)
Pneumatic actuated pilot
Electrical/Solenoid Valve Control
P
T
Normally closed valve
Pilot port
Pressurized Reservoir

Symbols in a hydraulic schematic 4 Pilot operated two-stage valve (uses a second lesser force to actuate the pilot actuation of the valve)
Pressure relief valve
65 (C) Jiří Tůma, 2018
P
T
Normally closed valve
Pilot port
Pneumatic: Solenoid first stage
Hydraulic: Solenoid first stage
Pneumatic: Air pilot second stage
Hydraulic: Air pilot second stage
Single-stage direct operation unit which accepts an analog signal and provides a similar analog fluid power output
Electro-Hydraulic Servo Valve
Two-stage with mechanical feedback indirect pilot operation unit which accepts an analog signal and provides a similar analog fluid power output
Electro-Hydraulic Servo Valve
To isolate one part of a system from an alternate part of circuit.

Symbols in a hydraulic schematic 5 Filter, Water Trap, Lubricator, and Miscellaneous Apparatus Symbols
66 (C) Jiří Tůma, 2018
Filter or Strainer
Filter or Strainer
With manual drain
Water Trap
With automatic drained
With manual drain
Filter with Water Trap
With automatic drained
Refrigerant, or chemical removal of water from compressed air line
Air Dryer
Oil vapor is injected into air line
Lubricator
Conditioning Unit (FRL, Pressure Regulator)
Compound symbol of filter, regulator, lubricator unit (FRL symbol)
Simplified Symbol

Servovalves
http://www.daerospace.com/HydraulicSystems/
Flapper Nozzle Servovalve Jet Pipe Servovalve
67 (C) Jiří Tůma, 2018

Electro-hydraulic servo valves
A B
T P
A B
T P P P
p1 p2
T
A B
T P P P
p1 p2
T
Proportional valve
An Electro-Hydraulic Servo Valve or EHSV is an electrically operated valve that controls how hydraulic fluids is ported to an actuator. Servo valves can provide precise control of position, velocity, pressure and force with good post movement damping characteristics
Centering spring
Fixed orifis
Pilot or control line
Hydraulic: Solenoid first stage with internal pressure
Stage 1
Stage 2
To actuators
Supply pressure
Tank
Supply pressure
Spring
Steady-state position Transient position
68 (C) Jiří Tůma, 2018
P P

Directional control valves
Four Way, Three Position (4/3) Valve
Directional valves are valves that direct flow in response to external commands. These valves do not provide flow or pressure regulation and functional only to direct flow (much like a switch). They usually consist of a spool inside a cylinder which is mechanically or electrically controlled.
2-Positions, 3-Positions, 4-Positions
2-way On-Off for fluid supply
3-way Single acting cylinders
4-way Double acting cylinders
5-way Pneumatic system with dual air pressure
P T
A B spring
solenoid
Valve actuator
Double acting
cylinders Single rod end
a b 1 3
2 a b
1 3
2
Normally closed
Three Way, Two position (3/2) Valve
Normally open
Single acting pneumatic cylinders with return spring
Manually actuated
M
Hydraulic accumulator
Unidirectional pump
Double acting cylinder
4/3 valve
Pressure relief valve
motor
filter
Supply line
Port B Port A
Control valve
69 (C) Jiří Tůma, 2018

Three-way, two-position (3/2) valve, normally closed
(C) Jiří Tůma, 2018 70
a b
1 3
2
No oil flow to the cylinder chamber
Manually actuated
Initial position
a b
1 3
2
Oil starts to flow to the cylinder chamber
Manually actuated
After pressing the valve actuator
1 3
2
a b a b
3-way valve

Electro-pneumatic circuits
Electric circuits
Pneumatic actuator with return spring
a b
1 3
2
S
Q
Q Q
24V DC
0V 3/2 valve
Normally open button
Normally closed
Coil
contact
71 (C) Jiří Tůma, 2018

Sensors

Measurement systems Input
Sensor Output
Physical quantity (stimulus ): Displacement, speed, RPM, acceleration, pressure, temperature, force, flow rate, ……
Signal in observable form: Voltage, electric current, pressure, digital Signal type: Binary (true/false), (log 0/log 1), (low/high) Analog (0 to 10 V, -5V to +5V, 4 to 20 mA) Digital
73 (C) Jiří Tůma, 2018
A transducer is a device that converts one form of energy to another form of energy. The term transducer commonly implies sensor or detector or probe. Transducers are widely used in measuring instruments.

Principle of sensors
Sensor
Transducer 1
Stimulus
Jacob fraden: Handbook Of Modern Sensors Physics Designs And Applications
74 (C) Jiří Tůma, 2018
A sensor is a device that receives a stimulus and responds with an electrical signal.
Transducer 2 Direct sensor e2 e1 e3
Electric signal
e1 , e2 , e3 , and so on are various types of energy.
The term sensor should be distinguished from transducer. The latter is a converter of one type of energy into an other,whereas the former converts any type of energy into electrical. Transducers may be parts of complex sensors. This suggests that many sensors incorporate at least one direct-type sensor and a number of transducers. The direct sensors are those that employ such physical effects that make a direct energy conversion into electrical signal generation or modification. An example of a transducer is a loudspeaker which converts an electrical signal into a variable magnetic field and, subsequently, into acoustic waves. This is nothing to do with perception or sensing.
Transducers may be used as actuators in various systems. An actuator may be described as opposite to a sensor—it converts electrical signal into generally nonelectrical energy.

Performance terms - 1 Accuracy and error
Error = measured value – true value
Hysteresis error
Input: Physical quantity
Output signal
hysteresis
Non-linearity error
Input: Physical quantity
Output signal
Non-linearity error
Assumed relationship
Actual relationship
Insertion error due to the loading
Measurement range
Precision, repeatability and reproducibility
Measured values
True value
High precision, low accuracy
Measured values
True value
Low precision, low accuracy
Measured values
True value
High precision, high accuracy The range of variable of system is the limits between which the input can vary.
75 (C) Jiří Tůma, 2018
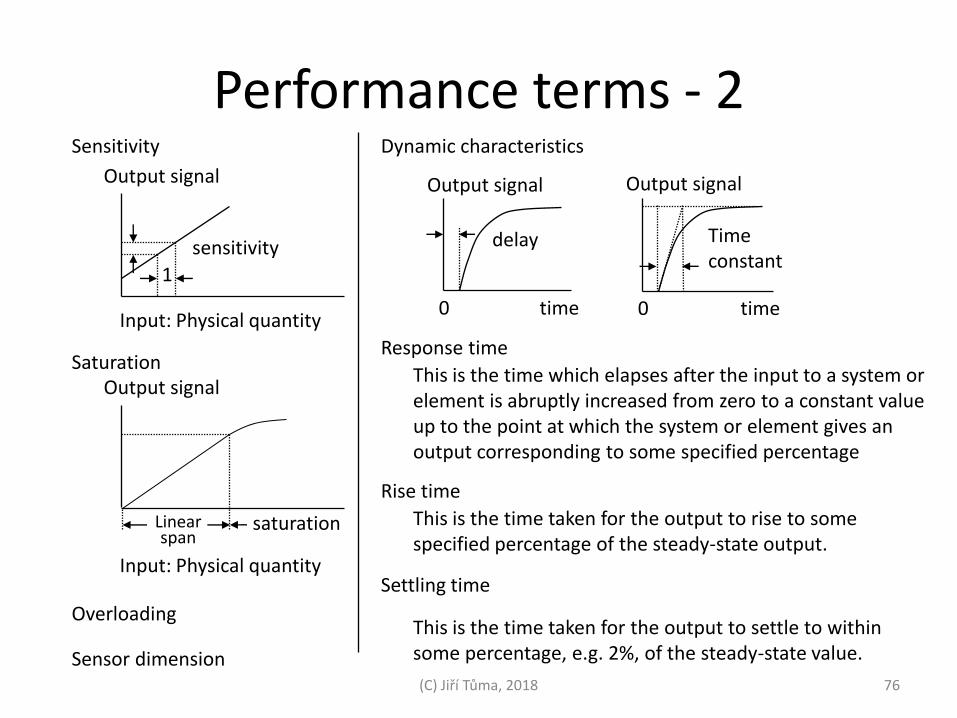
Performance terms - 2 Sensitivity
Input: Physical quantity
Output signal
sensitivity
1
Dynamic characteristics
Overloading
Sensor dimension
time
Output signal
delay
0 time
Output signal
Time constant
0
Response time
Rise time
Settling time
This is the time taken for the output to settle to within some percentage, e.g. 2%, of the steady-state value.
This is the time taken for the output to rise to some specified percentage of the steady-state output.
This is the time which elapses after the input to a system or element is abruptly increased from zero to a constant value up to the point at which the system or element gives an output corresponding to some specified percentage
76 (C) Jiří Tůma, 2018
Input: Physical quantity
Output signal
saturation Linear span
Saturation

Output impedance
77 (C) Jiří Tůma, 2018
Interface circuit Sensor Interface circuit
V Zout Zout
I
Zin
Zin
IS
VS
Sensor
Sensor has voltage output Sensor has current output
The output impedance Zout is important to know to better interface a sensor with the electronic circuit. This impedance is connected either in parallel with the input impedance Zin of the circuit (voltage connection) or in series (current connection). The output and input impedances generally should be represented in a complex form, as they may include active and reactive components. To minimize the output signal distortions, a current generating sensor should have an output impedance as high as possible and the circuit’s input impedance should be low. For the voltage connection, a sensor is preferable with lower Zout and the circuit should have Zin as high as practical.

Principles of sensors
78 (C) Jiří Tůma, 2018
Measuring chain in detail
Physical quantity → low voltage → electrical signal (voltage or current)
Physical quantity → electrical resistance → electrical signal
Physical quantity → force → electric current in the compensation electromagnet → electrical signal
Physical quantity → displacement → inductance → electrical signal
Strain → electrical resistence → the electrical signal
Velocity → V = B v l → electrical signal
Velocity → pulse frequency → electrical signal
Velocity → pulse frequency → length of time interval → the electrical signal
Velocity → difference frequency → electrical signal
Velocity → frequency schift (Doppler effect: sound, ultrasound or light) → electrical signal
The gas content with asymmetrical molecule (CO, CO2) → electrical resistance → electrical signal
The oxygen content in the gas → electrical resistance → electrical signal
kRRll ,

Wheatstone bridge
R1
R2
Rx
R3 Output voltage
Power supply 32
1
R
R
R
R xR1
R2
R4
R3 Output voltage
Power supply
A Wheatstone bridge is an electrical circuit used to measure an unknown electrical resistance by balancing two legs of a bridge circuit, one leg of which includes the unknown component. Its operation is similar to the original potentiometer.
Input: Detector Output: Physical quantity Wheatstone
bridge
Sensor
Voltage signal
strain gauge. resistance thermometer
R is the unknown resistance to be measured
R
The point of balance is the ratio
2
13
R
RRRx
VS
0V
V0
0V
S
x
xG V
RR
R
RR
RV
21
2
3
VG VG
0aI
0bI
0aV
0bV
Output voltage of the Wheastone bridge
VS 4-wire circuit
resistance
Line resistance
79 (C) Jiří Tůma, 2018

Sensors for Displacement
(C) Jiří Tůma, 2018 80
Linear variable differential transformer (LVDT)
Proximity sensors
Linear optical sensors
Confocal chromatic sensors
Strain gauges
Extensometers
Encoders
Magnetostrictive sensors
Draw-wire sensors

Displacement sensors
Δx
Δx
Δx
Δx
Δx
Δx
Δx ΔL
Δx ΔL1 ΔL2
Δx
ΔL Δx
ΔV
V0 Δx
V1
V1 V2
V0 V2
A) B) E)
C) D) F)
Capacitive sensing
where C is the capacitance, ε0 is the permittivity of free space constant, K is the dielectric constant of the material in the gap, A is the area of the plates, and d is the distance between the plates.
d
KAC 0
Inductive sensors
The inductance of the loop changes according to the material inside it and since metals are much more effective inductors than other materials the presence of metal increases the current flowing through the loop.
A, C) powered by AC
Δx ΔL
ΔL1 ΔL2
Δx
V = V1 - V2
Δx B, D)
Potentiometer
R1 Output voltage
Power supply R2
VL +VS
0V load
SL Vx
xV
Rx
xR
Rx
xR
12
1
81 (C) Jiří Tůma, 2018
wiper (slider)
(sliding contact)

Linear variable differential transformer
(C) Jiří Tůma, 2018 82
(LVDT)
V2
V1
Δx
Vout = V1 - V2
core
Vin LVDT’S AC Output Magnitude
Null Position
50% 100% 0%
AC Output Magnitude of Conventional LVDT Versus Core Displacement
Out Of Phase In Phase

Small-displacement sensors
Z
d
Oscilator Z d
Z0
u0 u
Demod
synchronisation
X
Y
Eddy-current sensor Capacitive sensor
Journal of a sleeve bearing
i ~ d
i2 H2
H1
Softmagnetic ferrite
Steel
Eddy current
magnetic field lines magnetic intensity
Proximity probe
83 (C) Jiří Tůma, 2018

Linear optical sensors
84 (C) Jiří Tůma, 2018
Light source lens
LED
Driver circuit
Amplifier circuit
Optical position detector element
Receiver lens
Design of a one-dimensional position-sensitive detector (PSD)
A PSD operates on the principle of photo effect.
The position of an object is determined by applying the principle of a triangular measurement.

Confocal chromatic sensors
85 (C) Jiří Tůma, 2018
The axial position of the focal point of an uncorrected lens depends on the color (wavelength) of the light to be focused. In the visible spectral region, the focal distance for blue light is minimal while it is maximal for red light. The focal points of other colors are located in between according to the row: red, orange, yellow, green, blue, violet. Depending on the distance of the target from the focusing lens, light of just a very small wavelength region Ȝ1 is focused on the target’s surface (Fig. 1). All other spectral components of the light source are illuminating a much wider area of the surface.
Halogen lamp
Fiber optics
Fiber coupler
Optical probe
Surface Measuring range
The focusing lens is also used to receive the backscattered light from the target’s surface and to focus it into an optical fiber. Due to that confocal arrangement, light having the wavelength λ1 is focused to the front of the fiber and enters it without clipping. All other spectral components are spread on a much bigger area. As a consequence, the light fed through the fiber to a spectrometer is almost monochromatic, it´s wavelength λ1 being a chromatic code about the axial position of the backscattering surface of the target.
http://armstrongoptical.co.uk/wp-content/uploads/2013/08/Chromatic-Confocal-Measurement-principles.pdf

Magnetostrictive sensors
(C) Jiří Tůma, 2018 86
http://www.mdpi.com/1424-8220/11/5/5508/htm
Linear position sensors based on magnetostrictive effect are widely used for position measurement. In accordance with the Wiedemann effect and the Villari effect, the magnetostrictive linear position sensor (MLPS) uses a ferromagnetic material waveguide to perform accurate position measurements.

Magnetostriction
(C) Jiří Tůma, 2018 87
http://www.instrumentation.co.za/article.aspx?pklarticleid=5195
Alignment of magnetic domains to the applied magnetic field H
The amount of magnetostriction in base elements and simple alloys is small, on the order of 1 µε

Wiedemann effect
(C) Jiří Tůma, 2018 88
Sensorland.com
Current
Current Waveguide twist
Ferromagnetic material
Position magnet (permanent)
An important characteristic of a wire made of a magnetostrictive material is the Wiedemann effect. When an axial magnetic field is applied to a magnetostrictive wire, and a current is passed through the wire, a twisting occurs at the location of the axial magnetic field. The twisting is caused by interaction of the axial magnetic field, usually from a permanent magnet, with the magnetic field along the magnetostrictive wire, which is present due to the current in the wire.

Magnetostrictive Linear-Position Sensors
(C) Jiří Tůma, 2018 89
https://www.controldesign.com/assets/wp_downloads/pdf/mts_sensors.pdf
Magnetostrictive Linear-Position sensor with sensing rod and position magnet.
A magnetostrictive position sensor measures the distance between a position magnet and the head end of the sensing rod. The position magnet does not touch the sensing rod, and therefore there are no parts to wear out.

Magnetostrictive sensors - principle
(C) Jiří Tůma, 2018 90
http://www.instrumentation.co.za/article.aspx?pklarticleid=5195
Mechanical strain pulse
Magnet field position magnet
Magnetostrictive sensing element (waveguide)
Magnet field of current probe
Movable position magnet
Strain (torsion) pulse convertor
Current interrogating pulse
In the transducer a strain pulse is induced in a magnetostrictive waveguide by the interaction of two magnetic fields. One field comes from a moving magnet, which passes along the outside of the transducer tube, and the other field is generated from a current pulse which is applied to the waveguide.
The interaction between these two magnetic fields produces a strain pulse which travels along the waveguide until the pulse is detected at the head of the transducer. The position of the moving magnet is precisely determined by measuring the elapsed time between the application of the current pulse and the arrival of the strain pulse.
The interrogation rate can be controlled from an external controller, or can be internally generated at a rate anywhere from one time per second to over 4000 times per second.
1 or 2 µs
Basic components of a Magnetostrictive Sensors
(C) Jiří Tůma, 2018 91
http://www.instrumentation.co.za/article.aspx?pklarticleid=5195
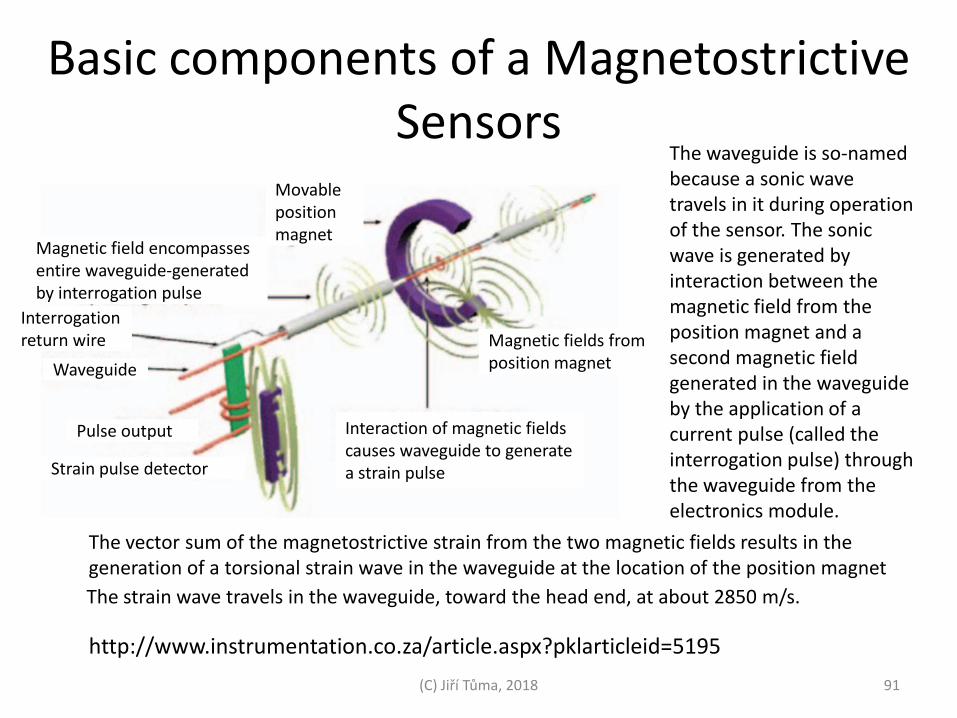
Interaction of magnetic fields causes waveguide to generate a strain pulse Strain pulse detector
Pulse output
Waveguide
Magnetic fields from position magnet
Interrogation return wire
Movable position magnet
Magnetic field encompasses entire waveguide-generated by interrogation pulse
The waveguide is so-named because a sonic wave travels in it during operation of the sensor. The sonic wave is generated by interaction between the magnetic field from the position magnet and a second magnetic field generated in the waveguide by the application of a current pulse (called the interrogation pulse) through the waveguide from the electronics module.
The vector sum of the magnetostrictive strain from the two magnetic fields results in the generation of a torsional strain wave in the waveguide at the location of the position magnet
The strain wave travels in the waveguide, toward the head end, at about 2850 m/s.

Installation into space-restricted cylinders
(C) Jiří Tůma, 2018 92
https://www.controldesign.com/assets/wp_downloads/pdf/mts_sensors.pdf
Strain (torsion) pulse convertor

Draw-wire sensors
(C) Jiří Tůma, 2018 93
https://www.micro-epsilon.com/displacement-position-sensors/draw-wire-sensor/MK_Serie/#!#WPS-MK60_analog
Measuring ranges (mm):
50 | 150 | 250 | 500 | 750 | 1,000 | 1,250 | 1,500 | 2,400 | … | 3,000 | 5,000 | 7,500 Linearity ± 0.1 % F.S.O. Signal output: Potentiometer
Signal output: Incremental encoder
Draw wire sensors are compact sensors which accurately measure the position or change in position of objects. Core components of a draw wire sensor are a precision measuring wire and a sensor element (e.g. potentiometer or encoder), which convert the path change into a proportional electrical signal.
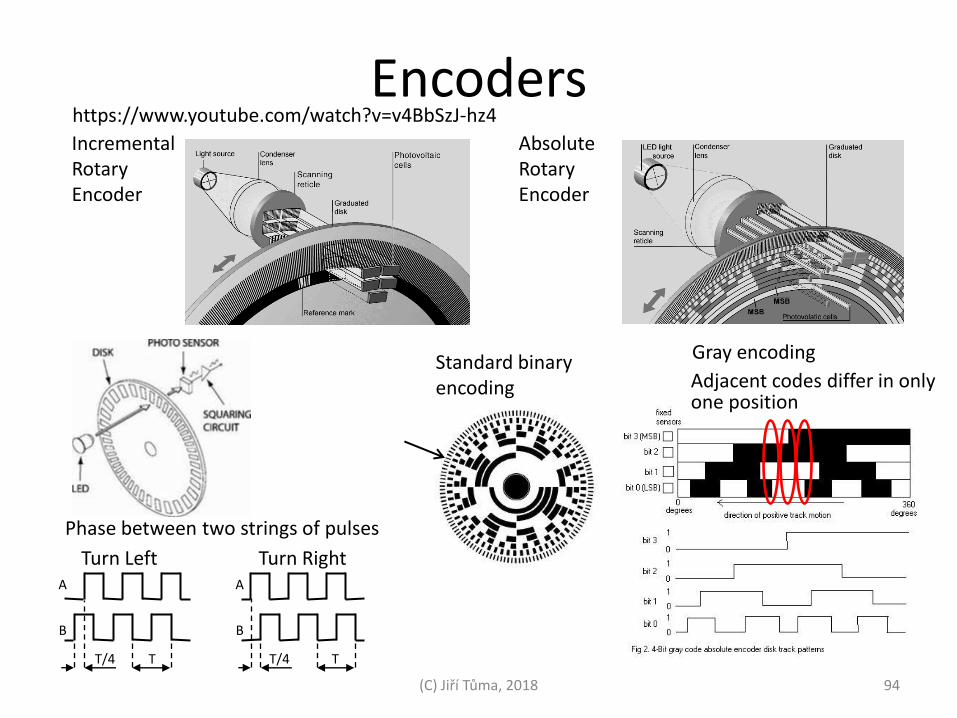
Encoders Incremental Rotary Encoder
T/4 T
A
B
Absolute Rotary Encoder
T/4 T
A
B
Turn Left Turn Right
Standard binary encoding
Gray encoding
Adjacent codes differ in only one position
Phase between two strings of pulses
94 (C) Jiří Tůma, 2018
https://www.youtube.com/watch?v=v4BbSzJ-hz4

Examples of encoders
(C) Jiří Tůma, 2018 95
Large Bore Hollow Shaft Encoders
Hollow Shaft Encoder Solid Shaft Encoders
Incremental Encoders Absolute Encoders
Parallel Output Format (Single Turn) with Semi Hollow Shaft
High Resolution Encoders They are available encoders with any value resolution from 1 to 65536 pulses per revolution, which in turn can be interpolated by 4 times if required for even greater resolution. A similar miracle can be provided with absolute technology too, up to as much as 20 bit resolution per turn.
Linear Encoders
Magnetic Type Optical Type

Uniformity of engine rotation
(C) Jiří Tůma, 2018 96

Definition of Strain
97 (C) Jiří Tůma, 2018
Hook’s Law StrainEStress
is the elastic modulus E
Microstrain µε = ΔL / L0 x 106
A microstrain equals the strain that produces a deformation of one part per million.
Strain ε = ΔL / L0
If ε equals to 0.1% then µε equals to 10-3 x 106 = 1000
American English use the word gage. British English is gauge. Except this, both gage and gauge mean the same.
Unstrained rod
Tensil strain Compressive strain
Metallic strain gauges are one of many devices, along with piezo resistors and devices based on interferometric techniques, that have been developed to measure microstrain. Invented by Edward E. Simmons in 1938, the metallic strain gauge consists of a fine wire or metallic foil with an electrical resistance (Ro) adhered to a flat rigid substrate. Ro typically varies from tens to thousands of ohms and the substrate is often referred to as the carrier.

Strain gauges
Metallic strain gauge Metal foil
Term
inal
s
Gauge factor
Semiconductor gauge
GFRR G
21
GRR
GFρ is resistivity
ν is Poisson’s ratio Change in strain gauge resistance
α is temperature coefficient Θ is temperature change
Material Gauge Factor Metal foil strain gauge 2-5
Thin-film metal 2 Single crystal silicon -125 to + 200 Polysilicon ±30 Thick-film resistors 100
98
Leads
(C) Jiří Tůma, 2018
120 Ω, 350 Ω, and 1,000 Ω Nominal resistance
Strain gauge type
Backing Encapsulation
Copper-coated tabs
Metallic grid pattern
Sold
er t
abs
Carrier
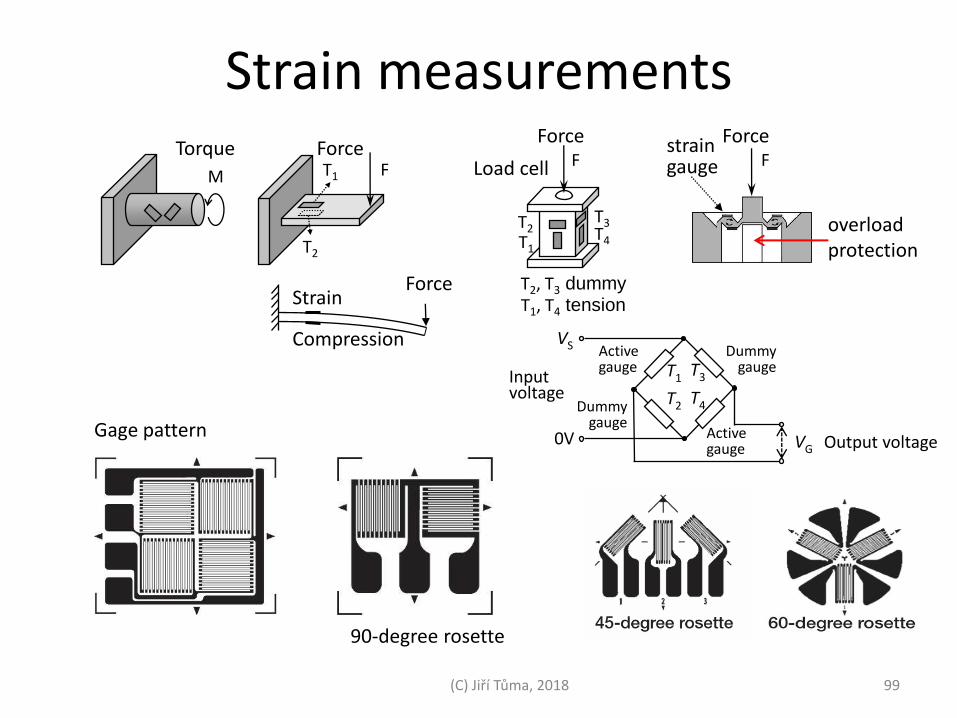
Strain measurements
Gage pattern
M F T1
T2 T1 T2 T4
T3
F
T2, T3 dummy T1, T4 tension
F Torque Force
overload protection
strain gauge
Force Force
Load cell
Strain
Compression
Force
99 (C) Jiří Tůma, 2018
90-degree rosette
T1
T2
T3
T4
Output voltage
Input voltage
VS
0V VG
Active gauge
Active gauge
Dummy gauge
Dummy gauge

Bridge strain gauge circuits Full-bridge strain gauge circuit
Half-bridge strain gauge circuit
Quarter -bridge strain gauge circuit
100 (C) Jiří Tůma, 2018
Signal conditioning for strain gages
• Amplification to increase measurement resolution and improve signal-to-noise ratio • Filtering to remove external, high-frequency noise • Offset nulling to balance the bridge to output 0 V when no strain is applied

Extensometers
(C) Jiří Tůma, 2018 101
An extensometer is a device that is used to measure changes in the length of an object. It is useful for stress-strain measurements and tensile tests. Its name comes from "extension-meter".
A Zwick Roell Clip-on Extensometer - Measuring Strain on a Metal Specimen.
Properties that are directly measured via a tensile test are ultimate tensile strength, maximum elongation and reduction in area.[
Istron

Pressure transducers
Wire
Measuring diaphragm
Isolating diaphragm
Glass Silicone oil Silicon
Strain gauge arrangement on a diaphragm
Strain gauges
Pressure
strain compression
The movement of the centre of a diaphragm can be monitored by some form of displacement sensor.
Diaphragm sensor
102 (C) Jiří Tůma, 2018

Force-to-current converters
R F
I
UR
F*
Force = surface area x pressure
ΔU
Δx Δx
Position sensor
pressure
coil A lever in balance
Pressure -
Pressure +
Current
Bellows
103 (C) Jiří Tůma, 2018
magnet
Impulse pipe
Bellow

Pressure difference measurements
104
Simple pitot tube
Pitot-static tube
(C) Jiří Tůma, 2018
Static pressure
Total pressure
Static pressure
Total pressure
Strain gages
Bellows Bellows
Pressure measurement with strain gauge on bellows

Liquid level sensors
Displacement
Float
Pressure Min Max Capacitive sensor Transmitter receiver
conductivity ultrasound hydrostatic pressure
ghp
105 (C) Jiří Tůma, 2018
Radionic gauges
Sou
rce
Det
ecto
r
Conductivity methods can be used to indicate when the level of a high liquid reaches a critical level.
The source of gamma radiation is generally cobalt-60, caesium-137 or radium~226. A detector is placed on one side of the container and the source on the other.
Load cell
Bin
Bulk material
Head
Head
Pressure
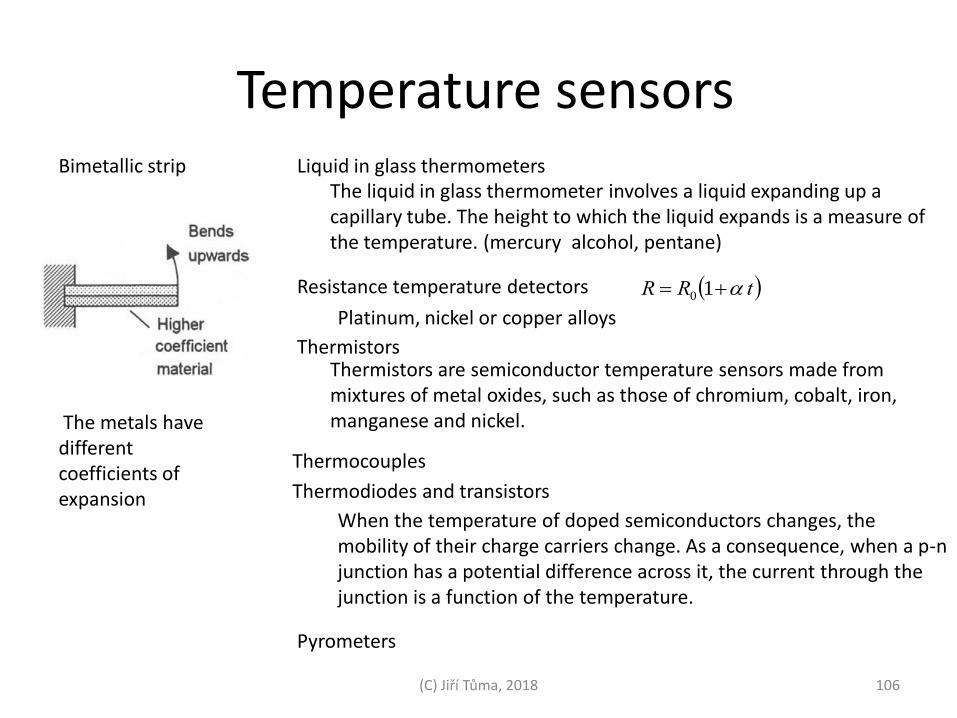
Temperature sensors
(C) Jiří Tůma, 2018 106
Bimetallic strip
The metals have different coefficients of expansion
Liquid in glass thermometers
Resistance temperature detectors
Thermistors
Thermocouples
Thermodiodes and transistors
Pyrometers
The liquid in glass thermometer involves a liquid expanding up a capillary tube. The height to which the liquid expands is a measure of the temperature. (mercury alcohol, pentane)
Platinum, nickel or copper alloys
tRR 10
Thermistors are semiconductor temperature sensors made from mixtures of metal oxides, such as those of chromium, cobalt, iron, manganese and nickel.
When the temperature of doped semiconductors changes, the mobility of their charge carriers change. As a consequence, when a p-n junction has a potential difference across it, the current through the junction is a function of the temperature.

Resistance thermometer
Pt 100 T
Vzdálená
instalace
Pt 100 T
I = konst
Pt 100 T
Four-wire configuration Three-wire configuration Two-wire configuration
Pt – 100, resistance for temperature of 0°C 100 Ω
107 (C) Jiří Tůma, 2018
(alternatively Pt – 500, Pt – 1000)

Temperature-dependent resistances
(C) Jiří Tůma, 2018 108
Temperature Resistance in Ω
in °C ITS-90 Pt100
Pt100 Pt1000
Typ: 404 Typ: 501
−50 79.901192 80.31 803.1
−40 83.945642 84.27 842.7
−30 87.976963 88.22 882.2
−20 91.995602 92.16 921.6
−10 96.001893 96.09 960.9
0 99.996012 100.00 1000.0
10 103.977803 103.90 1039.0
20 107.947437 107.79 1077.9
30 111.904954 111.67 1116.7
40 115.850387 115.54 1155.4
50 119.783766 119.40 1194.0
60 123.705116 123.24 1232.4
70 127.614463 127.07 1270.7
80 131.511828 130.89 1308.9
90 135.397232 134.70 1347.0
100 139.270697 138.50 1385.0
150 158.459633 157.31 1573.1
200 177.353177 175.84 1758.4

Thermocouples
thermostat 500C
Copper cable
terminals
Hot junction T1 T2
A B voltmeter
Cold junction Properties of thermocouple circuits
Long length of extension cable
Head
Measuring junction Conductors Sheath Insulator
Metal A
Metal B
109 (C) Jiří Tůma, 2018

Material EMF versus temperature
With reference to the characteristics of pure Platinum
emf-electromotive force
110
alloy
(C) Jiří Tůma, 2018

Themocouple characteristics table
Class 1 Class 2 Class 3
Thermocouple Range [° C] Tolerance
[° C] Range [°C]
Tolerance [° C]
Range [°C] Tolerance [°C]
T Cu-CuNi -40 to 350 ±0,5 or
±0,004 T -40 to 350
±1,0 or ±0,0075 T
-200 to 40 ±1,0 or ±0,0015 T
E NiCr-CuNi -40 to 800 ±1,5 or
±0,004 T -40 to 900
±2,5 or ±0,0075 T
J Fe-CuNi -40 to 750 ±1,5 or
±0,004 T -40 to 750
±2,5 or ±0,0075 T
K NiCr-Ni -40 to 1000 ±1,5 or
±0,004 T -40 to 1200
±2,5 or ±0,0075 T
-200 to 40 ±2,5 or ±0,0015 T
N NiCrSil-NiSil -40 to 1000 ±1,5 or
±0,004 T -40 to 1200
±2,5 or ±0,0075 T
-200 to 40 ±2,5 or ±0,0015 T
S Pt10Rh-Pt 0 to 1100 (… to 1600)
±1,5 or ±0,004 T
0 to 1600 ±1,5 or ±0,0025 T
R Pt13Rh-Pt 0 to 1100
(… to 1600) ±1 or ±0,004
T 0 to 1100
±1,5 or ±0,0025 T
B Pt30Rh-Pt6Rh 600 to 1700 ±1,5 or ±0,0025 T
600 to 1700 ±4 or ±0,005 T
111 (C) Jiří Tůma, 2018

Installation of thermocouples
Termination head
Nipple
Union
Nipple
112 (C) Jiří Tůma, 2018

Pyrometers
(C) Jiří Tůma, 2018 113
Total radiation pyrometer Disappearing filament pyrometer

Installation of thermocouples
Termination head
Nipple
Union
Nipple
114 (C) Jiří Tůma, 2018
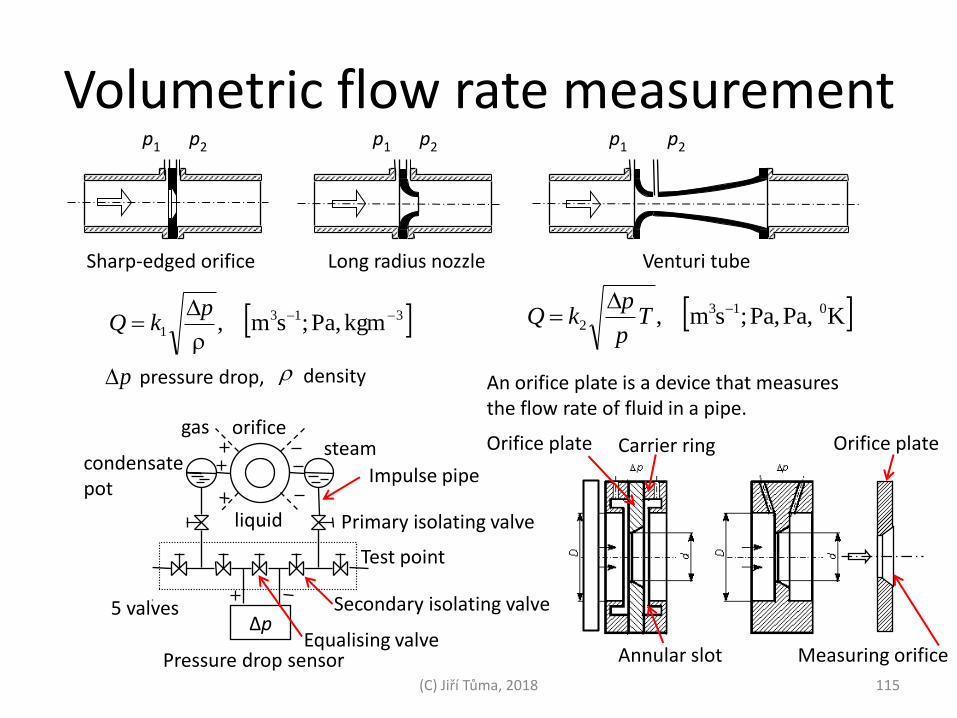
Volumetric flow rate measurement
Sharp-edged orifice
p1 p2 p1 p2
Long radius nozzle
p1 p2
Venturi tube
313
1 kgmPa,;sm,
pkQ KPa,Pa,;sm, 013
2
T
p
pkQ
pressure drop, p density
liquid
Δp
Pressure drop sensor
steam orifice
condensate pot
gas
5 valves
Impulse pipe
Orifice plate Carrier ring
Annular slot Equalising valve
Test point
Primary isolating valve
Secondary isolating valve
An orifice plate is a device that measures the flow rate of fluid in a pipe.
Orifice plate
115
Measuring orifice
(C) Jiří Tůma, 2018

Orifice plate installation
Flange
pipe elbow pipe diameter
Orifice plate installation - how much straight pipe should be upstream and downstream?
Flange
DL 101
pipe elbow
DL 51
Orifice
D
upstream downstream
116 (C) Jiří Tůma, 2018

Flow rate measurement
v
E
N
S B
v Impulse sensor
v
Flow rate is proportional to rotational frequency
Karman effect Magnetic flow meters Turbine flowmeter
Vortex
For a particular bluff body, the number of vortices produced per second, is proportional to the flow rate. For example, a thermistor, heated as a result of a current passing through it, senses vortices due to the cooling effect caused by their breaking away.
bluff body
B magnetic field v velocity L length of conductor E voltage
E = B v L
for conductive process medium Sensing
electrodes
117 (C) Jiří Tůma, 2018

Coriolis mass - flow meters
118 (C) Jiří Tůma, 2018
If a moving mass is subjected to an oscillation perpendicular to its direction of movement, Coriolis forces occur depending on the mass flow. A Coriolis mass flowmeter has oscillating measuring tubes to precisely achieve this effect. Sensors at the inlet and outlet ends register the resultant phase shift in the tube's oscillation geometry. The processor analyzes this information and uses it to compute the rate of mass flow. The oscillation frequency of the measuring tubes themselves, moreover, is a direct measure of the fluids' density.
The vector formula for the magnitude and direction of the Coriolis acceleration Where is the acceleration of the particle in the rotating system, , is the velocity of the particle with respect to the rotating system, and Ω is the angular velocity vector

Actuators

Control valve characteristics
120
Seals Valve plug Valve seat
P1 P2
P1 – P2
Actuator force Stem
pressure pressure
Valve seat
Valve plug
Linear Equal percentage Fast opening
Fluid flow
Stem movement
A B C
Flow through a single seat, two-port globe valve
All control valves have an inherent flow characteristic that defines the relationship between 'valve opening' and flowrate under constant pressure conditions. Valve opening‘ refers to the relative position of the valve plug to its closed position against the valve seat. The orifice pass area is sometimes called the 'valve throat' and is the narrowest point between the valve plug and seat through which the fluid passes at any time.
flowrate
valve opening
Butterfly valve
Ball valve
(C) Jiří Tůma, 2018

Valve and actuator configurations
121
Control signal
0-10 V, 4-20 mA
Controller
Manual
Power 230 V 110 V
24 V
Air inlet
Spindle movement with increase in air pressure
Normally open Normally closed
Air inlet
Spindle movement with increase in air pressure
Position transducer
Return spring
Positioning circuit
Feedback potentiometer
Typical electric valve actuator Typical pneumatic valve actuator
http://www.spiraxsarco.com/resources/steam-engineering-tutorials.asp
(C) Jiří Tůma, 2018

Pressure drop vs. flow rate
122
P
Q
ΔPline losses
0
ΔPvalve
Ppump head
Q
x
Equal percentage
0
Linear
0
P
Q
ΔPline losses
0
ΔPvalve
Phydrostatic head
0
Q
x
Equal percentage
0
Linear
0
0
Flow rate Flow rate
Pressure drop Pressure drop
Flow rate Flow rate
Stem position (% open) Stem position (% open)
Flow System with Relatively Constant Valve Pressure Drop
The linear globe valve has been designed so that the dependence of the flow rate on the valve opening was linear at a constant pressure drop
The equal percentage globe valve has been designed so that the dependence of the flow rate on the valve opening was linear for an ordinary pump
Pump characteristics
(Pump head is a pump pressure)
(C) Jiří Tůma, 2018
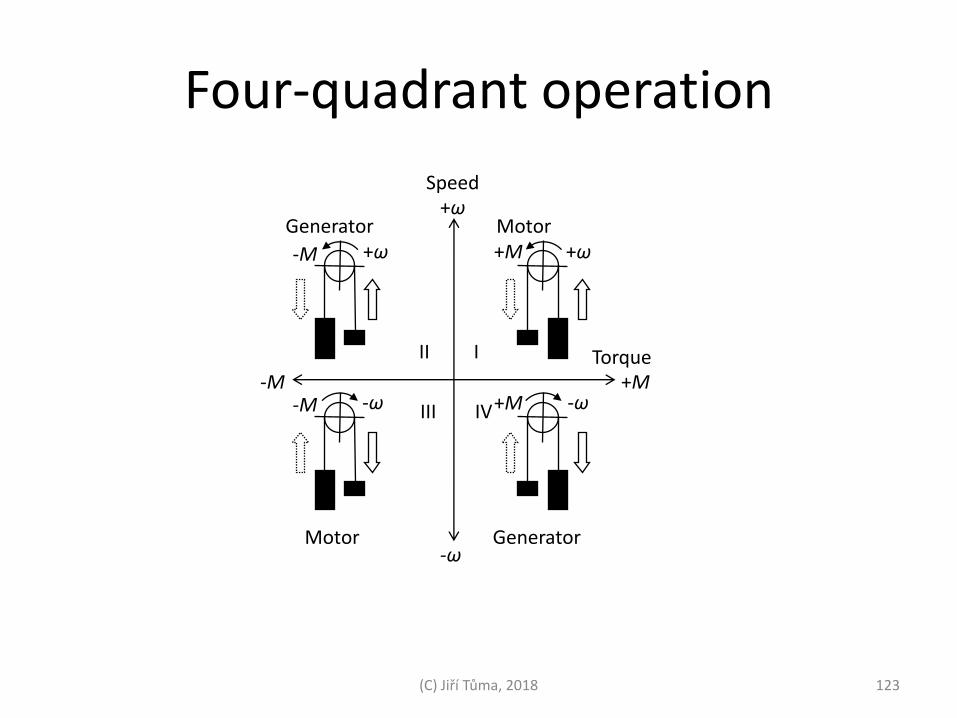
Four-quadrant operation
123
Motor
Motor
Generator
Generator
+M -M
+ω
-ω
I II
IV III
Torque
Speed
(C) Jiří Tůma, 2018
+ω +ω
-ω -ω
+M
+M -M
-M

Motion conversion 1
124
circular spline is a rigid circular ring
flex spline
wave generator plug
Ball screw
A ball screw is a mechanical linear actuator that translates rotational motion to linear motion with little friction. A threaded shaft provides a helical raceway for ball bearings which act as a precision screw.
Conversion of rotation to linear motion
Harmonic drive Conversion of high speed rotation to low speed rotation (Strain Wave Gearing )
The advantages: no backlash, light weight, high gear ratios (a ratio from 30:1 up to 320:1 while planetary gears typically only produce a 10:1 ratio), high torque capability, and coaxial input and output shafts.
(C) Jiří Tůma, 2018
http://harmonicdrive.de/en/
https://www.youtube.com/watch?v=2shapHAanIU
https://www.youtube.com/watch?v=bzRh672peNk
teeth
internal
external
https://www.youtube.com/watch?v=iRKDfknqtbc
https://www.youtube.com/watch?v=tMh-Axar3o8

Motion conversion 2
125
outer ring gear or annulus
sun (central gear)
arm or planet carrier
planetary gears
input output
Planetary gearbox
(Epicyclic gears )
Conversion of high speed rotation to low speed rotation
There are three basic components of the epicyclic gear: the sun (a central gear), the planet carrier (holds one or more peripheral planet gears, all of the same size, meshed with the sun gear) and the annulus (an outer ring with inward-facing teeth that mesh with the planet gear or gears). In many epicyclic gearing systems, one of these three basic components is held stationary; one of the two remaining components is an input, providing power to the system, while the last component is an output, receiving power from the system.
(C) Jiří Tůma, 2018

Electric motors

Semiconductor power electronics
(C) Jiří Tůma, 2018 127
v i iG iG
u
i
t
t
t
V – I characteristic
iB
iC
vC
B E
C
0 vC 0
iC
iB
iB = 0
V – I characteristic
Transistor Rvi
BCC ivfi ,
P N
anode catode
Diode symbol v
i
V – I characteristic
i
v
forward
breakdown
Diode A diode is a two-terminal electronic component with an asymetric characteristic
v i
R
v
t i
Thyristor iA
vA iG
iG = 0
Symbol
A thyristor is a three-terminal electronic component
Rectifier effect Ferdinand Braun discovery 1876
Rectifier effect under control
reverse
vA
iA
gate
catode anode
iG
P N N P
Invented in 1947 by John Bardeen and Walter Brattain

128
Major Categories by Type of Motor Commutation
Self-Commutated Externally Commutated
Mechanical- Commutator Motors
Electronic- Commutator (EC)
Motors
Asynchronous
Machines
Synchronous
Machines2
AC DC AC AC
* Universal motor (AC commutator series Motor or AC/DC motor)1 * Repulsion motor
Electrically excited DC motor: * Separately excited * Series * Shunt * Compound PM DC motor
With PM rotor: * BLDC motor With ferromagnetic rotor: * SRM
Three-phase motors: * SCIM * WRIM AC motors: * Capacitor * Resistance * Split * Shaded-pole
Three-phase motors: * WRSM * PMSM or BLAC motor - IPMSM - SPMSM * Hybrid AC motors: * Permanent-split capacitor * Hysteresis * Stepper * SyRM * SyRM-PM hybrid
Simple electronics Rectifier,
linear transistor(s) or DC chopper
More elaborate electronics
Most elaborate electronics (VFD), when provided
(C) Jiří Tůma, 2018

Direct current (DC) electric motor analysis
129
Brushed DC electric motor
Split ring commutator
A brushed DC electric motor generates torque from DC power supply by using internal mechanical commutation, permanent magnets form the stator field. Torque is produced by the principle of Lorentz force, which states that any current-carrying conductor placed within an external magnetic field experiences a force known as Lorentz force.
Permanent magnet
I
R
V
IRVR
kE
IkM ,
M
Increase of V
Decrease of
MBA
M
k
R
k
V
k
kMRV
k
IRV
k
E
2
Carbon brushes
Rotational velocity
Torque
Armature resistsance
Internally generated voltage (EMF)
Armature current
Terminal voltage
Constant based upon motor construction
R
E
I
V
k
M
Magnetic flux in motor coils
Power supply
A basic equation of a DC motor:
How to control rotational velocity + by changing terminal voltage
+ by changing magnetic flux.
Armature
(C) Jiří Tůma, 2018
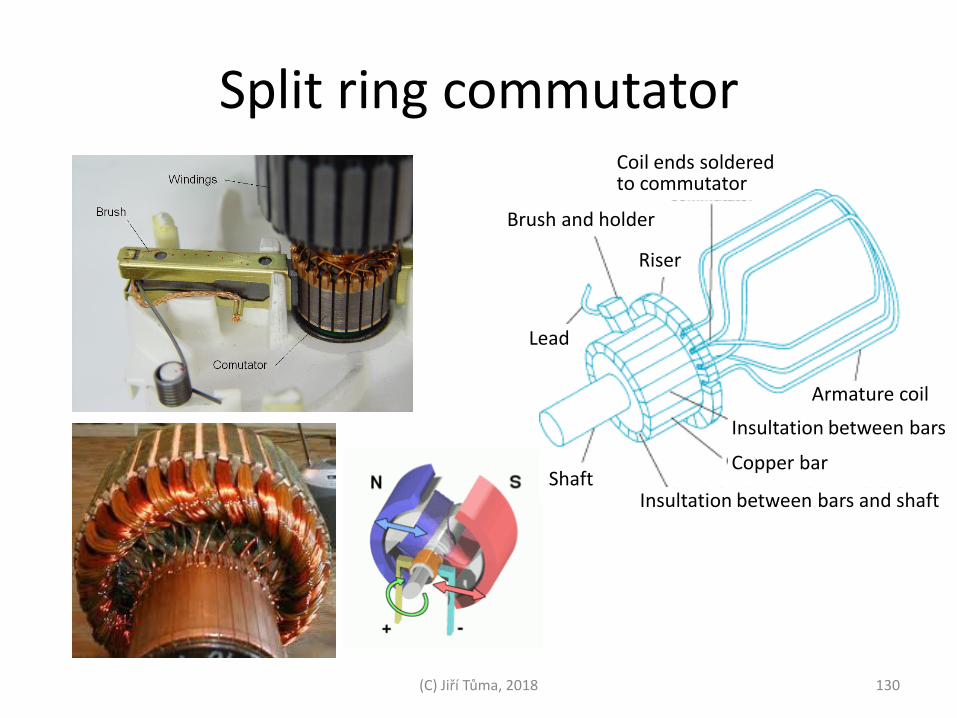
Split ring commutator
130
Shaft
Lead
Riser
Brush and holder
Coil ends soldered to commutator
Armature coil
Insultation between bars
Copper bar
Insultation between bars and shaft
(C) Jiří Tůma, 2018

Brushed DC motors
131
IB1
ω, M
AM G M
IB2
3 x U1
Ward Leonard motor control system
Permanent magnet DC motor
Wound stators - Electrically excited DC motor
series compound shunt
field coil field coil
field coil
field coil field coil
3 x V1 G generator, M motor
AM asynchronous motor
Grid
(C) Jiří Tůma, 2018

How to choose a flyback diode for a relay?
132
https://electronics.stackexchange.com/questions/110574/how-to-choose-a-flyback-diode-for-a-relay
(C) Jiří Tůma, 2018
A diode is put in parallel with a relay coil (with opposite polarity) to prevent damage to other components when the relay is turned off.
First determine the coil current when the coil is on. This is the current that will flow through the diode when the coil is switched off. In your relay, the coil current is shown as 79.4 mA. Specify a diode for at least 79.4 mA current. In your case, a 1N4001 current rating far exceeds the requirement. The diode reverse voltage rating should be at least the voltage applied to the relay coil. Normally a designer puts in plenty of reserve in the reverse rating. A diode in your application having 50 volts would be more than adequate. Again 1N4001 will do the job. Additionally, the 1N4007 (in single purchase quantities) costs the same but has 1000 volt rating.

DC electric motor control
133
time
Voltage Average: high
Average: medium
Average: low
Pulse width modulation (variable duty cycle)
Optical chopper
PID Controller
Pulse width modulator
Feeback
Error DC motor
Frequency to voltage converter
Set point
Tacho
DC motor
Switching transistor or MOSFET
Flyback (kickback) diode
Logic control
(C) Jiří Tůma, 2018
D T
Period Duty cycle … D / T = ξ
0
0
d Uttuu
T
u(t) U0
U0
U0
u(t)
u(t)
A chopper is an electronic switch that is used to interrupt one signal under the control of another
Voltage mean value …
Duty cycle

Chopper (electronics)
(C) Jiří Tůma, 2018 134
In electronics, a chopper circuit is used to refer to numerous types of electronic switching devices and circuits used in power control and signal applications. A chopper is a switching device that converts fixed DC input to a variable DC output voltage directly. A chopper is an electronic switch that is used to interrupt one signal under the control of another. In signal processing circuits, use of a chopper stabilizes a system against drift of electronic components; the original signal can be recovered after amplification or other processing by a synchronous demodulator that essentially un-does the "chopping" process.
An inverter changes a DC input to an AC output

Three-phase electricity
(C) Jiří Tůma, 2018 135
Three-phase transformer. Each phase has its own pair of windings
Three-phase electric power systems have at least three conductors carrying alternating current voltages that are offset in time by one-third of the period.
230/400V system provides 230V between the neutral (centre hub) and any one of the phases, and 400V across any two phases.

Induction motors
136
An induction or asynchronous motor is an AC motor in which all electromagnetic energy is transferred by inductive coupling from a primary winding to a secondary winding, the two windings being separated by an air gap. In three-phase induction motors, that are inherently self-starting, energy transfer is usually from the stator to either a wound rotor or a short-circuited squirrel cage rotor.
Stator
Rotor
3 x U Odpory
Squirrel cage rotor Wound rotor motor
The rotor windings of this motor are connected through slip rings to external resistances. Adjusting the resistance allows control of the speed/torque characteristic of the motor.
Stator
Wound Rotor
External rotor resistance
3 x V1
Cutaway view
The rotor is comprised of a number of thin bars, usually aluminum, mounted in a laminated cylinder.
Conductor bars
End ring
Brushes
Slip rings
(C) Jiří Tůma, 2018

Stator and rotor windings
137
http://textiletechinfo.com/spinning/induction-motor-3.htm
To phase A
To phase A
Magnetic field of coil A1
Stator
Rotor
Rotor conductor bars
(C) Jiří Tůma, 2018
Cage induction motor rotor's conductor bars are typically skewed to reduce noise

Number of poles per phase
138
http://textiletechinfo.com/spinning/induction-motor-3.htm
The number of poles is determined by how many times a phase winding appears.
2-Pole stator winding
A three-phase power supply provides a rotating magnetic field in an induction motor.
22 1
0p
f
Synchronous speed 0
1f pp
2p
where is the motor supply's frequency in Hertz and is the number of magnetic poles. That is, for a two-pole three-phase motor with three pole-pairs set 120° apart, equals 2 and equals 3 000 RPM for 50 Hz supply systems. is the number of pole pairs.
Example
0° 60° 120° 180° 240°
Rotation angle in deg
360° 300°
(C) Jiří Tůma, 2018
(A1 and A2)
2/p
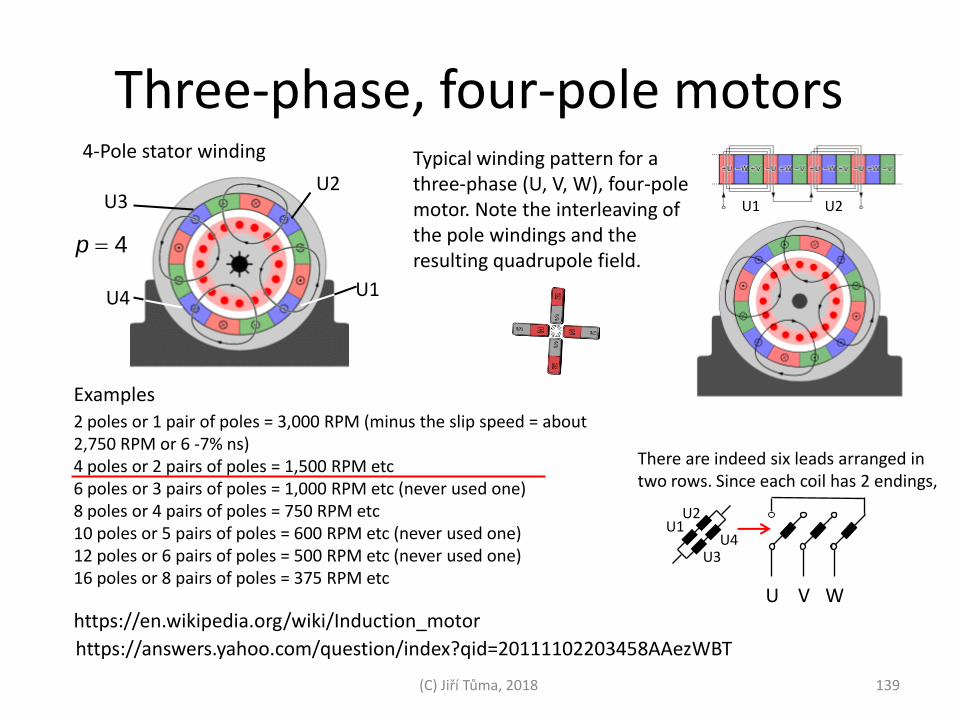
Three-phase, four-pole motors
139
https://answers.yahoo.com/question/index?qid=20111102203458AAezWBT
https://en.wikipedia.org/wiki/Induction_motor
4-Pole stator winding
4p
(C) Jiří Tůma, 2018
U1
2 poles or 1 pair of poles = 3,000 RPM (minus the slip speed = about 2,750 RPM or 6 -7% ns) 4 poles or 2 pairs of poles = 1,500 RPM etc 6 poles or 3 pairs of poles = 1,000 RPM etc (never used one) 8 poles or 4 pairs of poles = 750 RPM etc 10 poles or 5 pairs of poles = 600 RPM etc (never used one) 12 poles or 6 pairs of poles = 500 RPM etc (never used one) 16 poles or 8 pairs of poles = 375 RPM etc
U2 U3
U4
Typical winding pattern for a three-phase (U, V, W), four-pole motor. Note the interleaving of the pole windings and the resulting quadrupole field.
U1 U2
Examples
There are indeed six leads arranged in two rows. Since each coil has 2 endings,
U V W
U1 U2
U3 U4

Speed – torque characteristics
140
0
1
s
The rotating magnetic flux induces currents in the windings of the rotor.
Slip, s, is defined as the difference between synchronous speed ω and operating speed ω0 , at the same frequency, expressed in rpm or in percent or ratio of synchronous speed.
How to control rotational velocity
+ by changing slip (wound rotor motor)
+ by changing frequency
+ by changing the number of poles
+ by changing voltage
Speed (ω) - torque (T) curves for four induction motor types: A) Single-phase, B) Polyphase cage, C) Polyphase cage deep bar, D) Polyphase double cage.
T
T
T
T
ω ω
ω ω
T T
ω ω
changing voltage changing slip
(C) Jiří Tůma, 2018

Star (wye) and delta connection of the 3-phase squirrel-cage induction motors
(C) Jiří Tůma, 2018 141
L1 L2 L3 L1 L2 L3
L1 L2 L3 L1 L2 L3 Delta connection Star connection (Y configuration)
Grid
When an induction motor is started directly on line, it takes a starting current 6(six) times the full load current. To reduce the starting current the voltage across the motor need to be reduced. This can be done by autotransformer starter, star-delta starter or resistor starter. For star-delta connection the motor windings are connected in star (Y) during starting. The connection is changed to delta when the motor starts running.
Grid
NLLL UU 3LLU NLU
The voltage between line conductors is √3 times the phase conductor to neutral voltage:
Two windings per phase
Only one winding per phase
For star configuration the winding is powered by √3 times reduced voltage. The power consumption (proportional to UL-N square) is 3 times reduced.
LLU
Connection box
bridging
Connection box

Controlled rectifiers
142
3 x U1
AC DC
Diode Transformer
Three-phase bridge rectifier
Half wave rectifier
Full-wave rectifier using 4 diodes
Three-phase full-wave rectifier circuit using thyristors as the switching elements, with a center-tapped transformer
Grid
Grid
Three-phase supply Single-phase supply
R
R
Thyristors
AC DC
Average
(C) Jiří Tůma, 2018
3 x U1
Full-wave rectifier using a center tap transformer and 2 diodes
peakDC UU
peakDC UU 2Primary winding
Secondary winding
Thyristors
peakDC UU 2
Single phase Triple phase
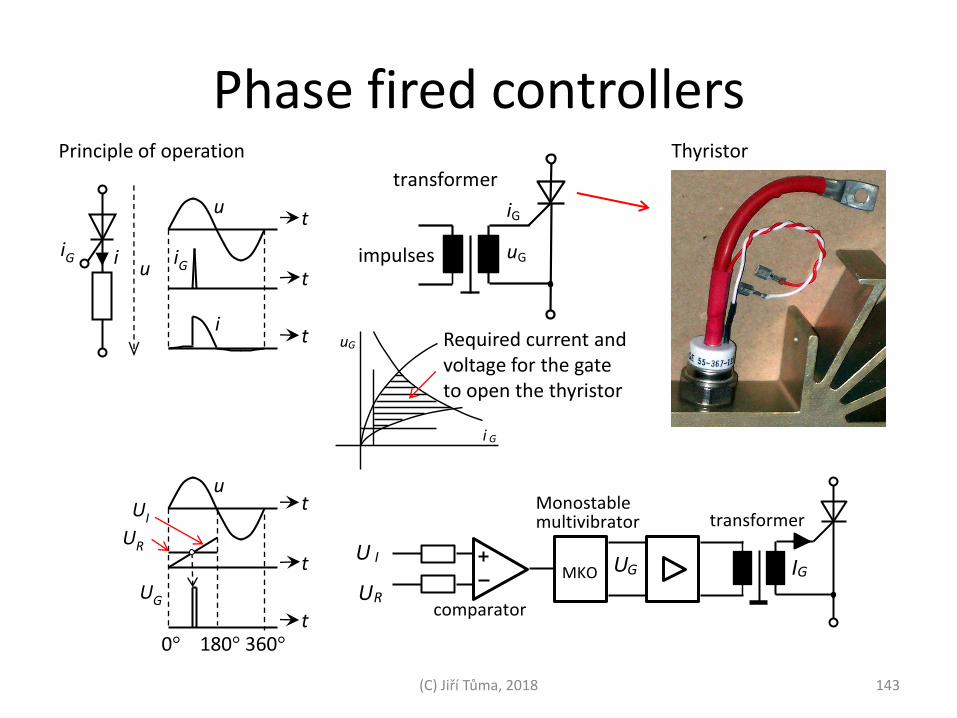
Phase fired controllers
143
u i iG iG
u
i
t
t
t
transformer
impulses
iG
uG
i G
u G
Principle of operation
transformer
comparator
I G MKO
U R
U I U G
Monostable multivibrator
Thyristor
UG
u
UI t
t
t 0° 180° 360°
UR
Required current and voltage for the gate to open the thyristor
(C) Jiří Tůma, 2018

Transistor as a switch
144
3 x U U
1 R B
T 1
T 2
T 3
T 4
AM
C
T 5
T 6
IA IC
IB
IA
IB
IC
time
iB = 0
R
iBMax
R
AM
0 uC U0 0
iC
U0 R
iB
iBMax
iB = 0
V – I characteristic
ON
OFF
t
t
t
t
t
UZ
iB
iZ
iT
iD
iZ0
iZ1
iZ0
period
pulse
= =
iB
iZ
iD
UZ
U
iT R L E
Pulse width modulation
*) When a coil is switched off, a large BACK EMF of several thousand volts in value appears across the coil.
(C) Jiří Tůma, 2018
CC uiRU 0RuRUi CC 0
IA
IC
IB
(variable duty cycle) R iC U0
uC
open
closed
A flyback (snubber, freewheeling, suppressor, or catch) diode eliminates a sudden voltage spike.
Diode protection circuit *)
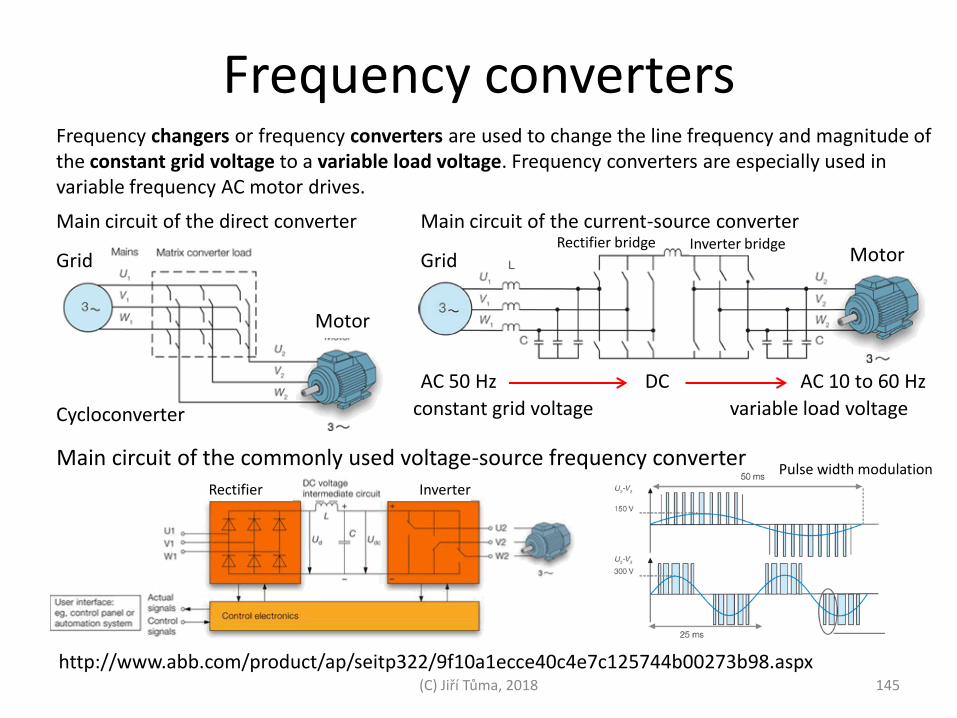
Frequency converters
145
http://www.abb.com/product/ap/seitp322/9f10a1ecce40c4e7c125744b00273b98.aspx
Frequency changers or frequency converters are used to change the line frequency and magnitude of the constant grid voltage to a variable load voltage. Frequency converters are especially used in variable frequency AC motor drives.
Grid Grid
Motor
Motor
Main circuit of the direct converter Main circuit of the current-source converter
Cycloconverter
AC 50 Hz DC AC 10 to 60 Hz
Main circuit of the commonly used voltage-source frequency converter
constant grid voltage variable load voltage
(C) Jiří Tůma, 2018
Pulse width modulation
Rectifier Inverter
Rectifier bridge Inverter bridge

Pulse width modulation
146
https://en.wikipedia.org/wiki/Pulse-width_modulation
A simple method to generate the PWM pulse train corresponding to a given signal is the intersective PWM: the signal (here the red sinewave) is compared with a sawtooth waveform (blue). When the latter is less than the former, the PWM signal (magenta) is in high state (1). Otherwise it is in the low state (0).
(C) Jiří Tůma, 2018
Time
lead
ing
edge
tr
ailin
g ed
ge
bo
th
edge
s
Time
PW
M s
ign
al
Sin
uso
idal
sig
nal

Stepper motors
147
+
Coil 1
Coil 3
T 1
T 2
T 3
T 4
Coil 2
Coil 4
4
T 1
T 2
+
Coil 1 Coil 3
T 4
T 3
T 5
T 6
Coil 2 Coil 4
T 8
T 7
-
4
Unipolar Transistor Switch
There are three basic types of stepper motor, Variable Reluctance (plain iron rotor which operate based on the principle that minimum reluctance occurs with minimum gap), Permanent Magnet and Hybrid (a sort of combination of both). A Stepper Motor is particularly well suited to applications that require accurate positioning and speed control
Two bi-directional H-bridge Circuits
3-Phase stator
Shaft bearing
Magnetic shaft
Rotor poles Stator coils
Bearing housing
Stator poles
Active winding
4-Phase stator
Multi-toothed magnetic rotor
(C) Jiří Tůma, 2018
2
1

Hydraulic actuators
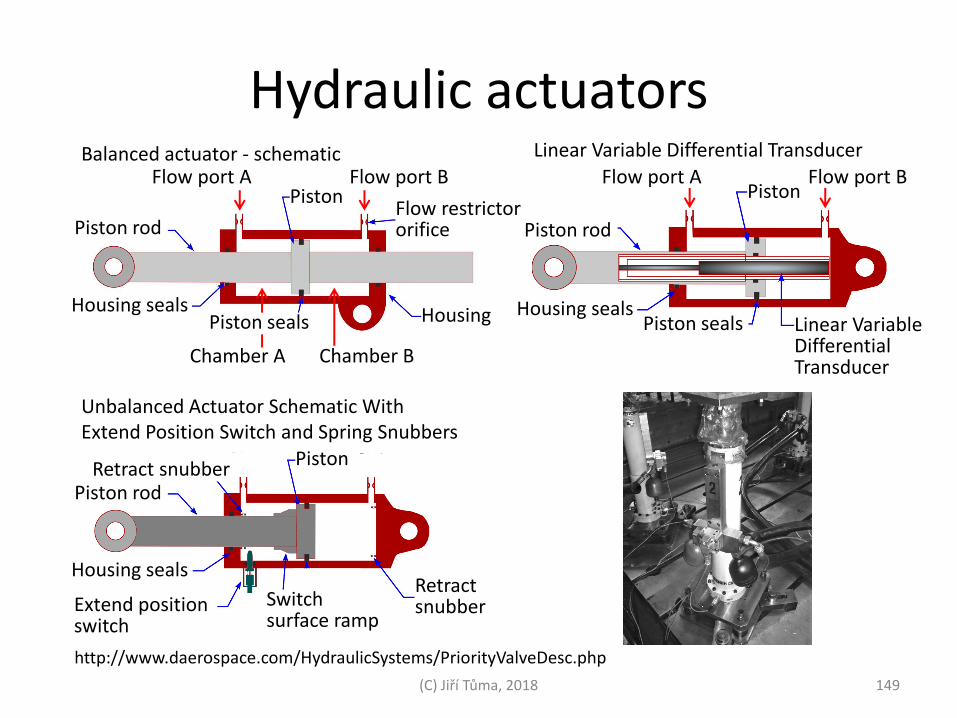
Hydraulic actuators
149
Balanced actuator - schematic
Piston rod
Housing seals
Flow restrictor orifice
Piston
Housing
Flow port B Flow port A
Chamber A Chamber B
Piston seals Housing seals
Piston seals
Piston Flow port B Flow port A
Piston rod
Linear Variable Differential Transducer
Piston
Piston rod
Housing seals Retract snubber
Retract snubber
Switch surface ramp
Extend position switch
Linear Variable Differential Transducer
Unbalanced Actuator Schematic With Extend Position Switch and Spring Snubbers
http://www.daerospace.com/HydraulicSystems/PriorityValveDesc.php
(C) Jiří Tůma, 2018

Hydraulic motors
150
Axial piston hydraulic motor
Gear Hydraulic Motor
http://www.daerospace.com/HydraulicSystems/PriorityValveDesc.php
Outlet (to reservoir)
Inlet (from system)
Motor shaft
Pistons
Vanes (spring loaded) Vane slot
Cam ring
Inlet
Outlet
Gear Gear
Output shaft Input shaft
Outlet Inlet
Rotor Shaft
There are 3 main types of hydraulic motors: piston, vane and gear.
Rotating Stationary
Swashplate does not rotate
Principle
Outlet (to reservoir)
Inlet (from system)
Motor shaft
(C) Jiří Tůma, 2018
Vane Hydraulic Motor
Direction of rotation
part part
variable

Piston pump and motor unit (Uni-directional)
151
Piston pump Piston motor
http://www.daerospace.com/HydraulicSystems/PriorityValveDesc.php
Pistons
Rotating Stationary
Swashplate does not rotate Outlet (to
system)
Inlet (from reservoir) Pump/Motor
shaft
Pistons
Rotating Stationary
Outlet (to reservoir)
Inlet (from system)
Outlet (to reservoir)
Inlet (from system)
Outlet (to system)
Inlet (from reservoir)
Compensator
Variable
(C) Jiří Tůma, 2018
Compensator
Piezoactuators

Piezoelectric effect
Domain Dipole Mechanical stress
Mechanical stress
Electric field Electric
voltage +
-
The behavior of the piezoelectric material in the unpolarized state (left) polarization after mechanical compression (middle), and after insertion of polarization of piezoelectric material to an electric field (right)
Direct piezoelectric effect discovered the brothers Pierre and Jacques Curie. They found that certain crystalline materials (ceramics) having the ability to polarize when subjected to an external force. Mechanical stress (compression and tension) generates electric charge and the electric field and external force in proportion. This phenomenon is used in sensors for dynamic forces. The inverse phenomenon lies in the fact that the electric field that is oriented parallel to the polarization direction, excites the mechanical expansion or contraction of the material. Piezoelectric effect is anisotropic, ie they act only in a certain direction.
153 (C) Jiří Tůma, 2018

Piezoelectric coefficients and directions
polarization
1
2
3
4
5
6 dij: Strain coefficients [m/V]:
strain developed (m/m) per electric field applied
(V/m) or (due to the sensor / actuator properties of
Piezo material). Charge output coefficients [C/N]:
charge density developed (C/m²) per given stress
(N/m²).
gij: Voltage coefficients or field output coefficients
[Vm/N]:
open circuit electric field developed (V/m) per
applied mechanical stress (N/m²) or (due to the
sensor / actuator properties of Piezo material) strain
developed (m/m) per applied charge density (C/m²).
kij: Coupling coefficients [no Dimensionss].
The coefficients are energy ratios describing the
conversion from mechanical to electrical energy or
vice versa
Example: d33 applies when the electric field is along the polarization axis (direction 3) and the strain (deflection) is along the same axis. d31 applies if the electric field is in the same direction as before, but the strain is in the 1 axis (orthogonal to the polarization axis)
http://www.physikinstrumente.com/tutorial/4_16.html
i – strain direction j – polarization direction
154 (C) Jiří Tůma, 2018

Piezoelectric materials The most popular material is a piezoelectric ceramic PZT (Lead-Zirconate-titanate) or polymer PVDF (Polyvinilidene fluoride).
Material PZT PVDF Piezoelectric coefficients d33 (10-12 C/N or m/V) d31 (10-12 C/N or m/V)
300 -150
-25
uniaxial d31=15 d32=3 biaxial
d31=d32==3
Maximum stress (MPa) Tensile stress Compression
600 80
200 200
Maximum intensity of the electric field (V/mm) 2000 5.105
Density (kg/m3) 7600 1800
155 (C) Jiří Tůma, 2018

Piezoactuator types Three types of piezoelectric actuators are reported in literature
Linear piezoelectric actuator
Linear motor
o Inchworm motors
o Stick and slip actuators
o Traveling wave ultrasonic motors
Piezoelectric benders
156 (C) Jiří Tůma, 2018

Linear piezoelectric actuators Displacement of piezoelectric actuators
ΔL
L U
1
2
n
Piezoelectric stack
ΔL
L U
t 313 dLEL
nUdL 33
Laminar piezoactuator
157 (C) Jiří Tůma, 2018

Diamond piezoactuators
(C) Jiří Tůma, 2018 158
Blocking force [N]
Free stroke [μm]
Output member Piezoelectric actuator
Fixed member Actuator pair
Tension member
Plate benders
Ring benders
Stacked actuator
Single actuator
Wire
Noliac piezo
10000
1000
100
10
1
0.1 1 10 100 1000 10000 100000 0.1

Applications piezoactuator
U
Active members in the Pratt truss with piezoactuators
159 (C) Jiří Tůma, 2018
Simple lever-arm mechanism

Piezoactuator design Stack actuator – ceramic plates
Two designs of piezoactuators:
Some piezoactuator are designed for open-loop positioning tasks. They have only the voltage input
Closed loop piezoactuator with the voltage input and the SGS-position sensors.
Thickness 0,1 mm ….. 100 V, LVPZ - Low voltage piezo Thickness 1 mm ….. 1000 V, HVPZ - High voltage piezo
The maximum relative displacement is between 0,1 and 0,13 %, what means that the actuator of the 100 mm length has the absolute travel of 100 μm. The hysteresis of piezoactuators is up to 15%.
Blocking force
Travel
Direction of
increasing voltage
0 0
Catalogue parameters
travel (free stroke)
force (blocking)
160 (C) Jiří Tůma, 2018

Products of Physic Instrument company Linear piezoelectric actuator E-504 Piezo Amplifier
Module E-509 Signal Conditioner / Piezo Servo Module
161 (C) Jiří Tůma, 2018

Piezoactuators of the P-844 / P-845 type
Outstanding Lifetime Due to PICMA® Piezo Ceramic Stacks
Travel Range to 90 µm Pushing Forces to 3000 N Pulling Forces to 700 N Sub-Millisecond Response,
Sub-Nanometer Resolution Vacuum Version, Optional
Water-Resistant Case
162 (C) Jiří Tůma, 2018

Technical Data
163 (C) Jiří Tůma, 2018

Movable bushing for a sleeve bearing
(C) Jiří Tůma, 2018 164
Flexible tip

Active vibration control
(C) Jiří Tůma, 2018 165
0 5 10 15 20 25 -300-250
-200-150
-100-100
-300
-250
-200
-150
-100
X [micrometer]
Time [s]
Y [m
icro
me
ter]
Load
Journal position
Reference
Piezoelectric actuators
Rotor system
Controller
dSpace
Proximity probes
Amplifier
Bushing

Piezo actuator drive (PAD)
(C) Jiří Tůma, 2018 166
Kinematic principle with microtoothing
Noliac piezo
Siemens
Slow and precise motion /0 to 60 RPM)

High-speed piezo motor actuators
(C) Jiří Tůma, 2018 167
•Drive-Component for Integration into Automation & Positioning Systems •Flexible Choice of Travel Ranges to Several 100 mm •Flexible Choice of Push/Pull Forces to Several 10 N •Minimum Incremental Motion to 0.05 µm •Velocity to 400 mm/s •Self-Locking w/o Head Build Up
PI M-674 RodDrive: Integrated High-Speed Piezo Motor Actuator
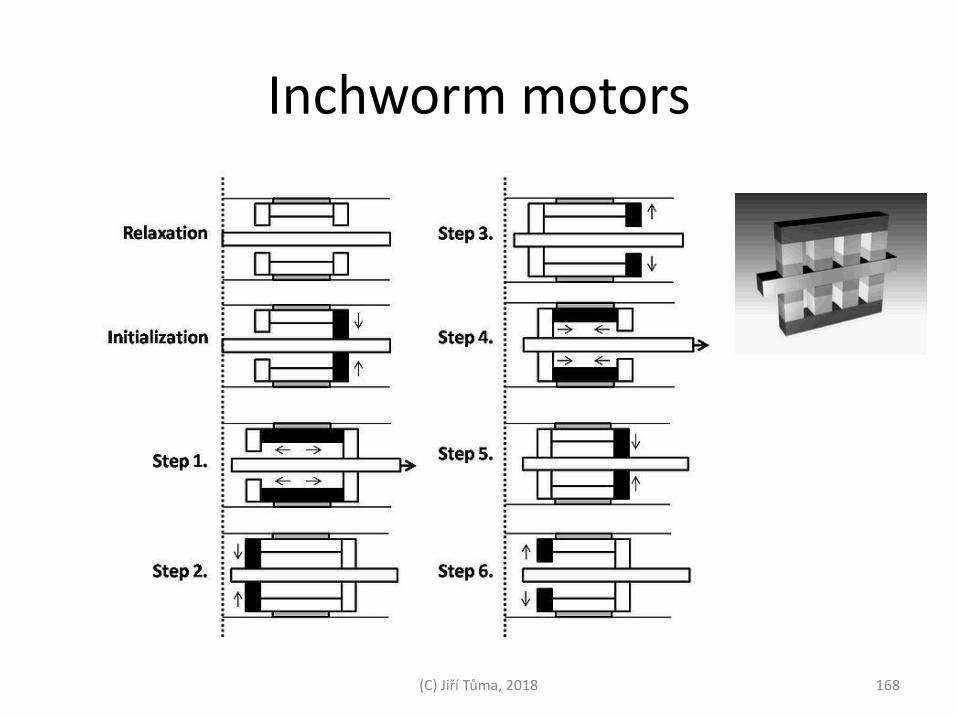
Inchworm motors
168 (C) Jiří Tůma, 2018

Stick and slip actuators
Moving object
Seismic mass
piezo
Moving object
Seismic mass
piezo
Moving object
Seismic mass
piezo
Slow extension
Initial position
Rapid contraction Δx
169 (C) Jiří Tůma, 2018
80-Pitch Screw Starting position
Slow rising
Quick return to starting position
Jaws
Piezo

Thank you for your attention

Symbols in a hydraulic schematic
171 (C) Jiří Tůma, 2018
Lines Square
Continuous line - for flow line One square - pressure control function
Dashed line - for pilot, drain Two or three adjacent squares - directional control
Envelope - for dashes around component symbols
Triangle
Circular Solid - Direction of Hydraulic Fluid Flow
Large Circle - pump, motor Open - Direction of Pneumatic flow
Small Circle - measuring devices Diamond
Semi-circle - rotary actuator Diamond - Fluid conditioner (filter, separator, lubricator, heat exchanger)
Flow restriction
Spring

Symbols in a hydraulic schematic
2 position – 2 way valve
2 position – 3 way valve
2 position – 4 way valve
3 position – 4 way valve Closed Center Valve
Valve capable infinite positioning (indicated by horizontal lines drawn parallel to the envelope
Valves
check valve
On-Off manually shunt off
Valve actuator
spring
solenoid
manual
Single acting
Cylinders
Double acting single rod end
Double acting double rod end
Liquid supply
Pressure relief valve
Hydraulic pump fixed displacement
Reservoir open to atmosphere
172 (C) Jiří Tůma, 2018
Open Center Valve
Cylinders