cubature methods and applications
TRANSCRIPT

Cubature Methods and Applications
Dan Crisan
Imperial College London
CEMRACS 2017Numerical methods for stochastic models:
control, uncertainty quantification, mean-fieldJuly 17 - August 25
CIRM, Marseille
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 1 / 40

Talk Synopsis
Feynman-Kac representations - a common platformTheoretical Analysis of solution of PDEsApproximation of Feynman-Kac representations
Wiener measure approximationComputational effort
Example 1: Semilinear PDEs (joint work with K. Manolarakis)The Feynman-Kac representationFunctional discretizationTheoretical resultsNumerical Implementation
Example 2: linear parabolic SPDEs (joint work with S. Ortiz-Latorre)The Feynman-Kac representationFunctional discretizationTheoretical resultsNumerical Implementation
Example 3: McKean-Vlasov PDEs (joint work with E. McMurray)The Feynman-Kac representationFunctional discretizationTheoretical resultsNumerical Implementation
Final remarksDan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 2 / 40

Feynman-Kac representations A common platform
Common feature of many PDEs: their solutions can be represented asintegrals of certain nonlinear functionals with respect to the Wiener measure.
Feynman-Kac formula
u(t , x) = E [Λt,x (W )] =
∫ω∈C([0,∞),Rd )
Λt,x (ω)dPW (ω)
Microscopic level Macroscopic level Timeline
Brownian motionW = Wt , t ≥ 0
Heat equation
∂t ut = 1
2 ∆utu0 = Φ
Feynman 1948 Kac 1949
Zakai equation dut = Lut + hut dYt Duncan, Mortensen, Zakai 1970
McKean-Vlasov PDEs∂t ut =
∑di,j=1 aij (ut )∂i∂j ut
+∑d
i=1 bi (ut )∂i ut + c(ut )utGartner 1988
Semilinear PDEs
∂t ut = Lut + f(t, x, ut ,∇ut
)u0 = Φ
Pardoux & Peng 1990, 1992
Fully Nonlinear PDEs F (t, x, ut ,∇ut ,∆ut ) = 0 Soner, Touzi & Victoir 2007
3 − d incompressibleNavier − Stokes equation
∂t ut + (ut · ∇)ut − ν∆ut +∇p = 0
∇ · ut = 0 Constantin & Iyer 2008
K-S equation dut = Lut + ut (h)(dYt − ut (h)dt) Crisan & Xiong 2009
viscous Burgers equation ∂t ut + ut∂x ut − ν∂2x ut = 0 Novikov & Iyer 2010
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 3 / 40
Feynman-Kac representations Theoretical Analysis of Feynman-Kac formulae
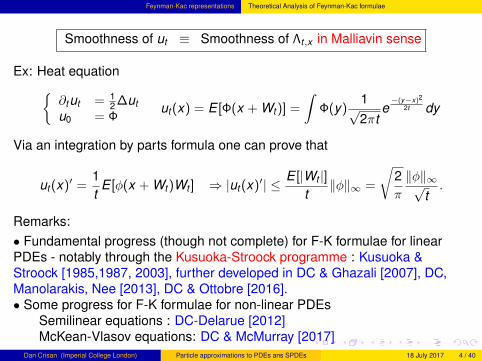
Smoothness of ut ≡ Smoothness of Λt,x in Malliavin sense
Ex: Heat equation∂tut = 1
2 ∆utu0 = Φ
ut (x) = E [Φ(x + Wt )] =
∫Φ(y)
1√2πt
e−(y−x)2
2t dy
Via an integration by parts formula one can prove that
ut (x)′ =1t
E [φ(x + Wt )Wt ] ⇒ |ut (x)′| ≤ E [|Wt |]t‖φ‖∞ =
√2π
‖φ‖∞√t.
Remarks:• Fundamental progress (though not complete) for F-K formulae for linearPDEs - notably through the Kusuoka-Stroock programme : Kusuoka &Stroock [1985,1987, 2003], further developed in DC & Ghazali [2007], DC,Manolarakis, Nee [2013], DC & Ottobre [2016].• Some progress for F-K formulae for non-linear PDEs
Semilinear equations : DC-Delarue [2012]McKean-Vlasov equations: DC & McMurray [2017]
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 4 / 40

Feynman-Kac representations Approximation of Feynman-Kac representation
u(t , x) = E [Λt,x (W )] =
∫ω∈C([0,∞),Rd )
Λt,x (ω)dPW (ω)
A three-step scheme:replace PW with PW = 1
n
∑ni=1 δωi - W approximates the signature of W
approximate Λt,x with an explicit/simple version Λt,x
control the computational effort (use the TBBA)
u(t , x) ' 1n
n∑i=1
Λt,x (ωi )
Full DNA Typical Paths Representative Paths Truncated DNA
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 5 / 40

Feynman-Kac representations Wiener measure approximation
Chen’s iterated integrals expansion - signature of a path
Let T(Rd)
=⊕∞
i=0 (Rd )⊗i
and T (m)(Rd)
=⊕m
i=0(Rd )⊗i be the tensor algebraof all non-commutative polynomials over Rd and, respectively the tensoralgebra of all non-commutative polynomials of degree less than m + 1. For apath ω ∈ Cbv ([0,∞),Rd ) define its signature St (ω) and, respectively, itstruncated signature Sm
t (ω) to be the corresponding Chen’s iterated integralsexpansion:
S : Cbv ([0,∞),Rd )→T(Rd)
St (ω) =∞∑
k=0
∫0<t1...tk<t
dωt1 ⊗ ...⊗ dωtk
Sm : Cbv ([0,∞),Rd )→T (m)(Rd)
Smt (ω) =
m∑k=0
∫0<t1...tk<t
dωt1 ⊗ ...⊗ dωtk .
The (random) signature and, respectively, the truncated signature of theBrownian motion are
St (W ) =∞∑
k=0
∫0<t1...tk<t
dWt1⊗...⊗dWtk , Smt (W ) =
m∑k=0
∫0<t1...tk<t
dWt1⊗...⊗dWtk .
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 6 / 40

Feynman-Kac representations Wiener measure approximation
E [St (W )] uniquely identifies the Wiener measure PW .
If W is another process such that E [Smt (W )] = E
[Sm
t (W )], then
E [Λt,x (W )] ' E [Λt,x (W )] high order approximation of u(t , x).
See DC and Ghazali [2007] for conditions.Several choices for W : Kusuoka [2001,2004], Kusuoka and Ninomiya[2004], Lyons and Victoir. [2004], Ninomiya and Victoir [2004], etc.
Theorem (Lyons & Victoir (2004))
For any t > 0, there exists paths ω1, . . . , ωN ∈ C00,bv([0, t ];Rd ) and
λ1, λ2, . . . , λN (∑N
i=1 λi = 1), such that if P(W = ωi ) = λi then
E [Smt (W )] = E
[Sm
t (W )].
If the above is true, we call LW =∑N
i=1 λiδωi the cubature measure anddenote it by Qm
t .
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 7 / 40

Feynman-Kac representations Wiener measure approximation
For example, if we want to approximate E[α(Xt )], where X is the the solutionof the following SDE
dXt = V0(Xt )dt +d∑
i=1
Vi (Xt ) dW it
Then X can be expressed as X = Ψt (W ) giving a representation of the formE[Λt (W )]. Choose X j to be the solution of the following ODE
dX jt = V0(X j
t )dt +d∑
i=1
Vi (Xjt )dωj,i
t
In this case:
E[Λt (W )] = EQm [α(Xt )] =N∑
i=1
λig(X jt )
and|E[Λt (W )]− E[Λt (W )]| ≤ Cδ
m−12 .
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 8 / 40

Feynman-Kac representations Wiener measure approximation
Cubature of order 3: For d=1, we can use 2 paths with equal weights λj = 12
defined asωj
t = tz i ,
where z i ∈ −1,1. For d ≥ 2 , we can use[
d(d + 2)
6
]+ 1 linear paths with
equal weights λj .
Cubature of order 5: For d=1, we can use 3 paths, ω, −ω and 0 with ω isdefined as
ω(t) =
√
32
(4−√
22)
t t ∈[0, 1
3
]√
36
(4−√
22)
+√
3(−1 +
√22) (
t − 13
)t ∈
[ 13 ,
23
]√
36
(2 +√
22)
+√
32
(4−√
22) (
t − 23
)t ∈
[ 23 ,1]
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 9 / 40

Feynman-Kac representations Computational effort reduction
• An additional procedure is used to control the computational effort.• The measure Qm is replaced by a measure Qm,N with support of size N byusing a tree based branching algorithm (TBBA).• The TBBA was introduced in DC & Lyons (2002) as the optimal stratifiedsampling procedure in the context of the filtering problem. The method has awider applicability: it is applicable to any method that uses branching trees.• By merging the TBBA with the cubature method we keep the number ofparticles on the support of the intermediate measures constant.
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 10 / 40

Feynman-Kac representations Computational effort reduction
• Assume that we constructed Qm =∑M
j=1 λjδγj with M paths and we want toreduce the number to at most N paths.•We replace Qm with a random measure Qm,N such that supp(Qm,N) ⊆supp(Qm) and that the size on its support is at most N. For an arbitrary pathγ ∈ supp(Qm), we will have
Qmk (γ) =
bNQm(γ)c
N with probability 1− NQm(γ)bNQm(γ)c+1
N with probability NQm(γ). (1)
• In addition, Qm,N is constructed so that it is a (random) probability measure,i.e., ∑
γ∈suppQm
Qmk (γ) = 1. (2)
• The mass allocated to each path γ ∈ supp(Qm) is either 0 or an integermultiple of 1/N ⇒ the support of any realization of Qm,N has size at most N.• The maximum number of paths is achieved when Qm,N puts mass 1/N on Nof the M paths. This is the basis of the control of the computational effort.
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 11 / 40

. Example 1: Semilinear PDEs
Let u ∈ C1,2([0,T ]× Rm) be the solution of the final value Cauchy problem(∂t + L)u = −f (t , x ,u,V1u, ...,Vdu) (x)) , t ∈ [0,T ), x ∈ Rm
u(T , x) = Φ(x), x ∈ Rm , (3)
whereL is the second order differential operator
L = V0 +12
d∑i=1
V 2i . (4)
In (4) Vi , i = 0,1...,d are the first differential operators associated toVi = (V j
i )dj=1.
Vi =m∑
j=1
V ji ∂xi
Particular case(∂t + ∆)u = −f (t , x ,u,∇u) (x)) , t ∈ [0,T ), x ∈ Rm
u(T , x) = Φ(x), x ∈ Rm , (5)
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 12 / 40

. The Feynman-Kac formula ( forward-backward SDEs)
Let (Ω,F ,P) be complete probability space endowed with a filtration thatsatisfies the usual conditions Ftt≥0. Let W be an Ft-adapted Brownianmotion and (X ,Y ,Z ) = (Xt ,Yt ,Zt ), t ∈ [0,T ] be the solution of the(decoupled) system:
Forward-Backward SDE
Xt = X0 +
∫ t
0V0(Xs)ds +
d∑i=1
∫ t
0Vi (Xs) dW i
s, forward c. (6)
Yt = Φ(XT ) +
∫ T
tf (s,Xs,Ys,Zs)ds −
d∑i=1
∫ T
tZ i
sdW is, backward c. (7)
- X m-dimensional, Y 1-dimensional, Z d-dimensional- Vi : Rm → Rm smooth vector fields Vi ∈ C∞b (Rm,Rm), i = 0,1, ...,d- The stochastic integral in (6) is a Stratonovitch type integral- Φ(XT ) called the final condition- f : [0,T ]× Rm × R × Rd → R Lipschitz, called ”the driver”.
Theorem (Pardoux & Peng (1990))
There exists a unique Ft -adapted solution (X ,Y ,Z ) of the system (6)+(7).
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 13 / 40

. The Feynman-Kac formula ( forward-backward SDEs)
Theorem (Peng 1991,1992, Pardoux & Peng 1992)
Under additional smoothness assumptions on the coefficients of the FBDSE,the unique solution of the Cauchy problem (5) admits the followingFeynman-Kac representation
u(t , x) = Y t,xt = E
[Φ(X t,x (T )) +
∫ T
tf (s,X t,x
s ,Y t,xs ,Z t,x
s )ds
], (8)
where (X t,x ,Y t,x ,Z t,x ) is the ‘stochastic flow’ associated FBSDE (6)+(7)
X t,xs = x +
∫ s
tV0(X t,x
u )du +d∑
i=1
∫ s
tVi (X
t,xu ) dW i
u, s ∈ [t ,T ], (9)
Y t,xs = Φ(X t,x
T ) +
∫ T
sf (u,X t,x
u ,Y t,xu ,Z t,x
u )du −d∑
i=1
∫ T
s(Z t,x
u )idW iu. (10)
Moreover (Z t,xs )i = Viu(s,X t,x
s ) for s ∈ [t ,T ].
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 14 / 40

. Functional discretization
We deduce from the Feynman-Kac representation (8) and the formula for Zthat:
u(t , x) = E
[Φ(XT ) +
∫ T
tf (s,Xs,u(s,Xs), (V1u, . . . ,Vdu)(s,Xs))ds
]
Hence there exists Λt : CRd [t ,T ]→ R such that
u(t , x) = E[Λt
(X t,x
[t,T ]
)].
Let π := 0 = t0 < t1 < . . . < tn = T be a partition of [0,T ], with δ = ti+1 − ti ,∆Wi+1 = Wti+1 −Wti .Define Rng = g and Sng = ∇gV or Sng = 0 if g not Lipschitz.For i = 0, . . . ,n − 1, we define the operators R i , Si :
Rig(x) = E[Ri+1g(X ti ,x
ti+1)]
+ δf (ti , x ,Rig(x),Sig(x))
Sig(x) =1δE[Ri+1g(X ti ,x
ti+1)∆Wi+1
]
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 15 / 40

. Functional discretization
Let:uδ(0, x) = E
[Λ(Xt0 ,Xt1 , ...,Xtn )
]= R0Φ(x).
Theorem (Bouchard & Touzi 2004, Gobet & Labart 2007, DC & Manolarakis2010)
For f Lipschitzsup
x∈Rd|uδ(0, x)− u(0, x)| ≤ C
√δ.
For f smoothsup
x∈Rd|uδ(0, x)− u(0, x)| ≤ Cδ.
Other discretizations methods are possible: Zhang 2005, DC & Manolarakis2010, Chassagneux & DC 2013
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 16 / 40

. Functional discretization
Next we use the cubature measure Qm of degree m = 3,5,7, ... coupled withthe TBBA procedure to produce a measure Qm,N with support of size N . Forevery i = 0, . . . ,n − 1 define the operators R i , Si
Rig(x) = EQm,N
[Ri+1g(X ti ,x
ti+1)]
+ δf (ti , x , Rig(x), Sig(x))
Sig(x) =1δEQm,N
[Ri+1g(X ti ,x
ti+1)∆Wi+1
]Let uδ(0, x) = EQm,N
[Λ(Xt0 ,Xt1 , ...,Xtn )
]= R0Φ(x).
Theorem (D.C. & Manolarakis, 2011)
supx∈Rd
E[|uδ(0, x)− u(0, x)|2] ≤ C(δ + δ
m−12 +
1N
).
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 17 / 40

. Numerical Implementation
Let u ∈ C1,2([0,T ]× R4) be the solution of the final value Cauchy problem(∂t + L)u = −f (t , x ,u,∆u)) , t ∈ [0,T ), x ∈ R4
u(T , x) = Φ(x), x ∈ R,
where
Lϕ(x) =4∑
i=1
µixidϕdxi
+σ2
i x2i
2d2ϕ
dx2i
x ∈ R.
f (t , x , y , z) = −ry −∑4
i=1(µi − r)zi , x ∈ R.Φ(x) = (x1x2x3x4 − k)+.
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 18 / 40

. Numerical Implementation
The randomness can be reduced by averaging over independent copies
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 19 / 40

. Example 2: Linear SPDEs with multiplicative noise
(Ω,F ,P) probability space,W m-dimensional standard Brownian motionρ = ρt , t ≥ 0 MF
(Rd)-valued stochastic process.
dρt (ϕ) = ρt (Aϕ)dt +m∑
k=1
ρt (γkϕ)dW kt . (11)
where
Aϕ (x) =12
d∑i,j=1
aij (x) ∂i∂jϕ (x) +d∑
i=1
bi (x) ∂iϕ (x)
a = σσ>
Particular case:
dρt (z) = ∆ρt (z)dt +m∑
k=1
γkρt (z)dW kt .
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 20 / 40

. The filtering problem
(Ω,F , P) probability spaceV = (V i
t )pi=1, t ≥ 0, U =
(U i
t)m
i=1 , t ≥ 0 independent Brownian motions
Xt = X0 +
∫ t
0b (Xs) ds +
∫ t
0σ (Xs) dVs
Wt =
∫ t
0γ (Xs) ds + Ut ,
The filtering problem: Find the conditional law of the signal Xt givenWt = σ(Ws, s ∈ [0, t ]), i.e.,
ϑt (ϕ) = E[ϕ(Xt )|Wt ], t ≥ 0, ϕ ∈B(Rd ).
Theorem
ϑt =ρt
ρt (1),
where ρt (1) =
∫Rd
1ρt (dx) = ρt (Rd ).
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 21 / 40

. The Feynman-Kac formula
The process W becomes a Brownian motion via a change of measure(Girsanov’s theorem)
dPdP
∣∣∣∣Ft
= Zt4= exp
(−∫ t
0
m∑k=1
γk (Xs) dUks −
12
∫ t
0
m∑k=1
γk (Xs)2 ds
), t ≥ 0.
Under P, W is a Brownian motion and X satisfies:
Xt = X0 +
∫ t
0b (Xs) ds +
∫ t
0σ (Xs) dVs.
The Feynman-Kac formula
ρt (ϕ) = E
[ϕ(Xt ) exp
(∫ t
0
m∑k=1
γk (Xs) dW ks −
12
∫ t
0
m∑k=1
γk (Xs)2 ds
)∣∣∣∣∣Wt
](12)
ρt (ϕ) is the expected value of a functional of X which depends Wto approximate numerically ρt (ϕ) we need to
approximate the functional with a simpler versionapproximate the law of the process Xcontrol the computational effort
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 22 / 40

. Functional discretization
Consider the equidistant partition itn
ni=0 and let gi be the noise dependent
functions
gi =m∑
j=1
(γ j (W jitn−W j
(i−1)tn
)− t2n
(γ j )2).
Define the operators
Rnsϕ (x) = E[ϕ(Xs(x))]
R isϕ (x) = E[ϕ(Xs(x)) exp (gi ( Xs(x)))|Wt ]
for i = 0, ..,n − 1. Let ρnt be the approximate measure
ρnt (ϕ) = E [ϕ(Xt )Z n
t (X ,W )|Wt ] = E[
R0tnR1
tn...Rn
tnϕ (X0)
∣∣∣Wt
]Z n
t (X ,W ) =n∏
i=1
exp
(m∑
k=1
(γk (Xs) (W it
n−W (i−1)t
n)− t
2nγk (Xs)2
))
Finally define ϑnt (ϕ) by the formula ϑn
t (ϕ) =ρn
t (ϕ)
ρnt (1)
.
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 23 / 40

. Functional discretization
M. All moments of X0 are finite. The functions b, σ are Lipschitz.FLp. E [Zt (X ,W )p] <∞ and supn E [Z n
t (X ,W )p] <∞ for some p > 2.
Condition FLp holds true if γ is bounded. If γ is unbounded, but it has lineargrowth, then the condition is satisfied if X has exponential moments uniformlybounded on [0, t ].
Theorem
Assume that conditions M and FLp hold true and γk , k = 1, ...,m areLipschitz. Then, if ϕ has polynomial growth, there exists a constantc = c (ϕ, t) independent of n such that
E[|ρn
t ϕ− ρtϕ|2]≤ c
n.
Moreover, if supn E[(ϑnt (ϕ))2] <∞, then
E [|ϑnt ϕ− ϑtϕ|] ≤
c√n,
where, again, c = c (ϕ, t) is a constant independent of n.
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 24 / 40

. Functional discretization
AP. Let (Ps)s≥0 be the semigroup associated to the Markov process X . Wewill assume that, for any Lipschitz continuous function ψ : Rd→ R, Psψ istwice differentiable for any s ∈ [0, t ]. Moreover, if
Pa,bψ , Paψ − Pbψ,a,b ∈ [0, t ] ,
we will assume that there exists a constant c7 = c7 (t) independent of a and bsuch that
supx∈Rd
|Pa,bψ (x)| ≤ ckψ(√
a−√
b)
(13)
supx∈Rd
|∂iPa,bψ| ≤cb
kψ (a− b) , i = 1, ...,d , (14)
where kψ is the Lipschitz constant of ψ.
Inequalities (13) and (14) are satisfied if, for example, f , σ =(σi)d
i=1 ∈ C∞b (Rd )
and the vector fields(σi)d
i=1 satisfy the Hormander condition.
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 25 / 40

. Functional discretization
Theorem
Assume that conditions M, FLp and AP hold true. Assume also that thefunctions ϕ and γi i = 1, ..,m are Lipschitz. Then there exists N > 0 such thatfor all n > N and ε ∈ (0,1), there exists a constant c = c (ϕ, t ,N, ε)independent of the partition such that
E[|ρn
t ϕ− ρtϕ|2]≤ c
n2−ε .
Moreover, if supn E[(ϑnt (ϕ))2] <∞, then for all n > N and ε ∈ (0,1), there
exists a constant c = c (ϕ, t ,N, ε) independent of the partition such that
E [|ϑnt ϕ− ϑtϕ|] ≤
cn1−ε .
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 26 / 40

. Functional discretization
TheoremAssume that conditions M, FLp are satisfied and that the functionsγi ∈ C2
b (Rd ) for i = 1, ..,m. Then, if ϕ has polynomial growth, there exists aconstant c = c (ϕ, t) independent of n such that
E[|ρn
t ϕ− ρtϕ|2]≤ c
n2 . (15)
Moreover, if supn E[(ϑnt (ϕ))2] <∞,
E [|ϑnt ϕ− ϑtϕ|] ≤
cn,
where, again, c = c (ϕ, t) is a constant independent of n.
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 27 / 40

. Approximation of the law of X
Introduce the operators
Rnsϕ (x) = EQm [ϕ(X x
s )]
R isϕ (x) = EQm [ϕ(X x
s ) exp (gi ( X xs ))]
Recall that ρnt (ϕ) = E
[R0
tnR1
tn...Rn
tnϕ (X0)
∣∣∣Wt
]with corresponding
approximationρn
t (ϕ) = EQm
[R0
tnR1
tn...Rn
tnϕ (X0)
∣∣∣Wt
].
Theorem
For all ϕ ∈ Cm+2b (Rd ) and p ≥ 1,
||ρnt (ϕ)− ρn
t (ϕ)||p ≤c
n(m−1)/2
m+2∑i=1
||∇iϕ||∞.
where c = c(t ,m,p) is independent of n.
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 28 / 40

. Controlling the computational effort
A third procedure is used to control the computational effort. The measure Qm
is replaced by a measure Qm,N with support of size N by using a tree basedbranching algorithm (TBBA). Recall that
Rnsϕ (x) = EQm,N [ϕ(X x
s )], R isϕ (x) = EQm,N [ϕ(X x
s ) exp (gi ( X xs ))],
ρnt (ϕ) = EQm,N
[R0
tnR1
tn...Rn
tnϕ (X0)
∣∣∣Wt
]Theorem
E[|ρnt (ϕ)− ρn
t (ϕ) |2] ≤ CN.
Corollary
E[|ρnt (ϕ)− ρt (ϕ) |2] ≤ C
(1
nα+
1
nm−1
2
+1N
).
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 29 / 40

. Numerical Implementation
Consider the 1-dimensional model:
dρt (ϕ) = ρt (Aϕ)dt + ρt (γϕ)dWt .
where
Aϕ(x) =σ2
2d2ϕ
dx2 (x) + µσ tanh(µxσ
) dϕdx
(x)
γ(x) = h1x + h2
Then
ρt ' w+N (A+t /(2Bt ),1/(2Bt )) + w−N (A−t /(2Bt ),1/(2Bt )),
where
w±t , exp((A±t )2/(4Bt )
)/(exp
((A+
t )2/(4Bt ))
+ exp((A−t )2/(4Bt )
))
A±t , ±µσ
+ h1Ψt +h2 + h1x0
σ sinh (h1σt)− h2
σcoth (h1σt) ,
Bt ,h1
2σcoth (h1σt) ,
Ψt ,∫ t
0
sinh(h1σs)
sinh(h1σt)dWs,
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 30 / 40

. McKean-Vlasov SDEs
Consider
∂tut (x) =d∑
i=1
V i (x ,ut (ϕi )))2ut (x) + V 0(x ,ut (ϕ0)))ut (x), ut = f
Thenu(0, x) = E [f (X x
T )] ,
where X is a solution of a McKean-Vlasov SDE with smooth scalar interaction
X xt = x +
∫ t
0V0(X x
s ,E[ϕ0(X xs )]) ds +
d∑i=1
∫ t
0Vi (X x
s ,E[ϕi (X xs )]) dBi
s, (16)
scalar interaction := the dependence on the solution through integralsagainst scalar functions,
E[ϕ0(X xs )], E[ϕi (X x
s )], i = 1, ...,d .
ϕi ∈ C∞b (RN ;R), Vi ∈ C∞b (RN+1;RN).
B =(B1, . . . ,Bd
)d-dim standard Brownian motion.
The process X gives a probabilistic representation of a nonlinear PDE.
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 31 / 40

. Main Assumptions
V0, . . . ,Vd : RN ×R→ RN are vector fields Vi (·, x ′) on RN parametrised by thesecond variable, x ′ ∈ R, with the Lie Bracket between any two given by
[Vi ,Vj ](x , x ′) = ∂xVj (x , x ′)Vi (x , x ′)− ∂xVi (x , x ′)Vj (x , x ′),
where ∂Vi (x , x ′) := (∂xl Vki (x , x ′))1≤k,l≤N is the Jacobian matrix of Vi and
similarly for ∂xVj . Then, for α ∈⋃
k≥11, . . . ,Nk and i ∈ 1, . . . ,N, we defineinductively
V[i] := Vi , V[α∗i] := [Vi ,V[α]] .
(A1): Uniform strong Hormander condition: There exist δ > 0 and m ∈ N suchthat for all ξ ∈ RN ,
inf(x,x′)∈RN×R
∑α∈∪m
k=11,...,Nk
〈V[α](x , x ′), ξ〉2 ≥ δ |ξ|2
(A2): Smoothness of coefficients:
ϕi ∈ C∞b (RN ;R), Vi ∈ C∞b (RN × R;RN) i = 0, . . . ,d
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 32 / 40

. Main Assumptions
Two algorithms
Partition [0,T ] into 0 = t0 < t1 < . . . < tn = T
X xt = x +
∫ t
0V0(X x
s ,E[ϕ0(X xs )]) ds +
d∑i=1
∫ t
0Vi (X x
s ,E[ϕi (X xs )]) dBi
s,
Taylor method TM
• Introduced by Chaudru de Raynal & Garcia-Trillos [2015].• Over the interval [tj , tj+1] replace Eϕi (X x
t ) appearing in the coefficients withthe cubature approximation of the Taylor expansion of the path t 7→ Eϕi (X x
t )around tj up to some order, q.
Lagrange interpolation method LIM
• Over the interval [tj , tj+1] replace Eϕi (X xt ) with a Lagrange polynomial which
interpolates the cubature approximation of Eϕi (X xt ) at the previous r points in
the time partition.
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 33 / 40

. Main Assumptions
E(T , x , l ,Πn) - the global error. Parameters:
• r the maximal no of interpolation points required to approximate Eϕi (X0,yt )
• q the truncation of the Taylor expansion of Eϕi (X0,yt )
• n no. of partition points.• l the cubature order.
Theorem (DC, McMurray, 2016)
Let f ∈ C∞b (RN ;R). Then, the error for the Taylor method satisfies
supx∈RN
|E(T , x , l ,Πn)| ≤ Cn−1∑j=0
(tj+1 − tj )A(q,l),
where A(q, l) := (q + 2) ∧ (l + 1)/2. The error in the Lagrange interpolationmethod is
supx∈RN
|E(T , x , l ,Πn)| ≤ Cn−1∑j=0
(tj+1 − tj )
((j + 1) ∧ r)!
j∧(r−1)∏k=0
(tj+1−tj−k )+(tj+1−tj )(l+1)/2.
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 34 / 40

. Main Assumptions
Parameters:
• γ controls the choice of the Kusuoka partition Πγn• m level required for the uniform strong Hormander condition
Theorem (DC, McMurray, 2016)
Suppose f is only Lipschitz continuous. Assuming that we use the Kusuokapartition Πγn with γ > l − 1, then the error in the TM satisfies
m = 1 : supx∈RN
|E(T , x , l ,Πγn )| ≤ C n−B(q,l)−1/2, (17)
m ≥ 2 : supx∈RN
|E(T , x , l ,Πγn )| ≤ C n−B(q,l), (18)
where B(q, l) = (q + 12 ) ∧ l−2
2 . Assuming that we use the modified Kusuokapartition Πγ,rn with γ ∈ (l − 1, l), then the error in the LIM satisfies
m = 1 : supx∈RN
∣∣E(T , x , l ,Πγ,rn )∣∣ ≤ C n−D(r ,l)−1/2 (1− r/n)−l/2, (19)
m ≥ 2 : supx∈RN
∣∣E(T , x , l ,Πγ,rn )∣∣ ≤ C n−D(r ,l) (1− r/n)−l/2, (20)
where D(r , l) = (r − 32 ) ∧ l−2
2 .
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 35 / 40

. Numerical Examples
Example 1
N = d = 1:
X 0,xt = x +
∫ t
0E[X 0,x
s
]ds + Bt , X x
t = xet + Bt , EX 0,xt = xet
Terminal function f (x) = x+ := maxx ,0 and, by integrating the Gaussiandensity, we can compute
E(X 0,xt )+ =
√tφ(
xet√
t
)+ xet
(1− Φ
(−xet√
t
)),
where φ and Φ are the density and cumulative distribution function,respectively, of a standard Gaussian random variable.
• The Taylor approximation of order q is easy to compute:T q
t
(EX 0,x
t
)=∑q
k=0xk! tk .
• Cubature formula of degree 5• A fourth order adaptive Runge-Kutta scheme to solve the ODEs.• To achieve order 2 convergence with a cubature formula of degree 5choose q ≥ 1 and γ ∈ (4,5) with Taylor method and r ≥ 3 in the Lagrangeinterpolation method.
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 36 / 40

. Numerical Examples
• Parameters (x ,T , γ, q, r) = (0.5,10,4.5,2,3).
0 0.2 0.4 0.6 0.8 1 1.2
log10(n)-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
log10(relativeerror) Lagrange
Gradient = -2.22TaylorGradient = -2.8
Figure: log-log error plot comparison between the LIM and TM. The gradient of eachsolid line is given by a linear regression on the last 5 points.
• Both methods achieve the expected quadratic convergence rate.• TM performs better than LIM.
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 37 / 40

. Numerical Examples
Example 2
• coefficients are not uniformly elliptic and N = d = 2.• X 0,x
t =(X 1
t ,X2t)
(X 1
tX 2
t
)=
(x1x2
)+
∫ t
0
([2 + sin
(EX 2
s)]
X 1t
) dB1
s +
∫ t
0
(X 2
tX 1
t
) dB2
s ,
where the coefficients are
V0 ≡ 0, V1(x1, x2, x ′) =
(2 + sin(x ′)
x1
), V2(x1, x2, x ′) =
(x2x1
), ϕ1(x1, x2) = x2,
for all (x1, x2, x ′) ∈ R3.• At x1 = 0 the coefficients degenerate.•
V[(1,2)](x1, x2, x ′) =
(x1
2 + sin(x ′)− x1
).
• Since x1 and 2 + sin(x ′)− x1 cannot both be zero at the same time, we seethat V1,V2 and V[(1,2)] span R2. The coefficients satisfy the uniform strongHormander condition, for m = 2.
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 38 / 40

. Numerical Examples
• For m = 2, with a cubature formula of degree 5 (NCub = 13), we expect toachieve a convergence rate of 3/2. To do so, we have to choose γ ∈ (4,5)and r > 7/2.• Parameters (x1, x2,T , γ, r) = (1,0.5,1,4.5,4) and f (x) = x+.• No explicit solution, we compare the cubature approximation to a MonteCarlo approximation with Euler-Maruyama discretisation.
0 0.2 0.4 0.6 0.8 1 1.2
log10(n)-3.5
-3
-2.5
-2
-1.5
-1
-0.5
log10(relativeerror) Lagrange
Gradient = -2.05TaylorGradient = -1.97
Figure: The gradient of each line is given by a linear regression on the last 5 points.
The performance of the algorithms is similar. Empirically we observe secondorder convergence, whereas a rate of 3/2 is predicted.
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 39 / 40

. Final remarks
The solution of a variety of deterministic and stochastic PDEs can beanalyzed and/or approximated through their corresponding Feynman-Kacrepresentations.The common methodology contains three steps: functional discretization,Wiener measure approximation (cubature method) and computationaleffort reduction (TBBA).The cubature method is essentially deterministic. The diffusionapproximation uses a set of ordinary differential equations to approximatethe distribution of the solution of the SDE.The (exponentially) increase in the computational effort is controlled bythe TBBA (a random method).A first step towards a unified theory of approximations
Dan Crisan (Imperial College London) Particle approximations to PDEs ans SPDEs 18 July 2017 40 / 40