design and implementation of fractional step filters
TRANSCRIPT

University of Calgary
PRISM: University of Calgary's Digital Repository
Graduate Studies Legacy Theses
2010
Design and Implementation of Fractional Step Filters
Freeborn, Todd
Freeborn, T. (2010). Design and Implementation of Fractional Step Filters (Unpublished master's
thesis). University of Calgary, Calgary, AB. doi:10.11575/PRISM/15341
http://hdl.handle.net/1880/49119
master thesis
University of Calgary graduate students retain copyright ownership and moral rights for their
thesis. You may use this material in any way that is permitted by the Copyright Act or through
licensing that has been assigned to the document. For uses that are not allowable under
copyright legislation or licensing, you are required to seek permission.
Downloaded from PRISM: https://prism.ucalgary.ca

THE UNIVERSITY OF CALGARY
Design and Implementation of Fractional Step Filters
by
Todd Freeborn
A THESIS
SUBMITTED TO THE FACULTY OF GRADUATE STUDIES IN PARTIAL
FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF
MASTER OF SCIENCE
DEPARTMENT OF ELECTRICAL AND COMPUTER ENGINEERING
CALGARY, ALBERTA
JULY, 2010
c� Todd Freeborn 2010
The author of this thesis has granted the University of Calgary a non-exclusive license to reproduce and distribute copies of this thesis to users of the University of Calgary Archives. Copyright remains with the author. Theses and dissertations available in the University of Calgary Institutional Repository are solely for the purpose of private study and research. They may not be copied or reproduced, except as permitted by copyright laws, without written authority of the copyright owner. Any commercial use or re-publication is strictly prohibited. The original Partial Copyright License attesting to these terms and signed by the author of this thesis may be found in the original print version of the thesis, held by the University of Calgary Archives. Please contact the University of Calgary Archives for further information: E-mail: [email protected]: (403) 220-7271 Website: http://archives.ucalgary.ca

ABSTRACT
This thesis investigates the design of fractional lowpass and highpass filters of order (n+a)
with fractional step a through the stopband while maintaining a flat passband. Here n is an
integer 1, 2, 3... and 0 < a < 1. The design of these filters uses an integer-order approxi-
mation of the fractional-order Laplacian operator sa . Simulations and physically realized
integer order filters demonstrate the fractional step through the stopband for highpass and
lowpass filters of order (1+a) to (4+a) in steps of 0.1, 0.5, and 0.9.
Also proposed in this thesis is a modification to a second order approximation used for
the fractional-order Laplacian operator, sa , where 0 < a < 1. This modification is used to
create equal-ripple magnitude and phase responses, both having less cumulative and peak
error than the original second order approximation. Fractional filters of order (1+a) = 1.8
are realized using both the modified and original approximation to highlight the benefits of
the modification. First order lowpass filters with fractional steps of 0.2, 0.5, and 0.8, are
simulated using the approximation with experimental results verifying the operation of this
approximation in the realization of fractional step filters.
Fabricated integrated circuit fractional capacitors are used in the implementation of a
fractional Tow-Thomas biquad. This demonstrates a fractional step low-pass filter without
the use of the approximated fractional Laplacian operator. Experimental results verify the
operation of the fractional step filter and fractional behaviour of the capacitors.
ii

ACKNOWLEDGEMENTS
This thesis has been possible due to the guidance and support offered by many people. I
take this opportunity to give my heartfelt thanks, first and foremost, to my supervisor Dr.
Brent Maundy. Thanks for introducing me to this field and giving me the opportunity to
pursue this work. Both your time and guidance lent were invaluable to my graduate studies
and the completion of my research.
I would also like to thank Dr. Ahmed Elwakil from the Department of Electrical and
Computer Engineering at the University of Sharjah. The advice on the state of my research,
review of my publications, and steady stream of papers in this field were always both
extremely helpful and very welcome.
My thanks also to all those who supported my decision to pursue my graduate studies.
Especially Dr. Roghoyeh Salmeh and Dr. Dave Irvine-Halliday, whose enthusiasm and
advice were very influential in my decision.
I am eternally grateful to my parents, whose constant and unwavering support made my
pursuit of this all possible. Thank you for allowing me the chance to complete my graduate
studies.
I would also like to thank the Government of Alberta for their financial support of this
work through the Queen Elizabeth II Graduate Scholarships.
iii

For my parents
Thank you.
iv

TABLE OF CONTENTS
Abstract ii
Acknowledgments iii
Dedication iv
Table of Contents v
List of Tables viii
List of Figures ix
List of Abbreviations xiv
1 INTRODUCTION 11.1 Traditional Filters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Selection of Order Based on Design Specifications . . . . . . . . . 31.2 Fractional Calculus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2.1 Fractional Laplacian Operator . . . . . . . . . . . . . . . . . . . . 51.3 Research Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.4 Thesis Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 DESIGN OF FRACTIONAL FILTERS 82.1 Analysis of Previous Fractional Low Pass Filter (FLPF) . . . . . . . . . . . 8
2.1.0.1 Roots of the W -plane . . . . . . . . . . . . . . . . . . . 82.2 Proposed Fractional Low Pass Filter (FLPF) . . . . . . . . . . . . . . . . . 10
2.2.1 Selection of k2,3 for Flat Passband Response . . . . . . . . . . . . 112.2.2 Stability Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2.2.1 Minimum Root Angle in W -plane . . . . . . . . . . . . . 152.2.3 Implementation of Higher Order Fractional Low Pass Filters (FLPF) 172.2.4 Fractional High Pass Filters (FHPF) . . . . . . . . . . . . . . . . . 18
v

2.2.4.1 Higher Order Fractional High Pass Filter . . . . . . . . . 192.3 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3 PHYSICAL REALIZATION OF FRACTIONAL FILTERS 213.1 Approximation of the Fractional Laplacian Operator . . . . . . . . . . . . 213.2 Operational Amplifier Approximated FLPF Implementation . . . . . . . . 24
3.2.1 Realization of the 2nd Order Block H2(s) . . . . . . . . . . . . . . 253.2.2 Realization of the 1st Order Block H1(s) . . . . . . . . . . . . . . . 273.2.3 Simulation and Experimental Results . . . . . . . . . . . . . . . . 29
3.2.3.1 Printed Circuit Board Realization . . . . . . . . . . . . . 293.3 Field Programmable Analog Array Implementation . . . . . . . . . . . . . 31
3.3.1 FPAA Realization of a (1+a) Fractional Low Pass Filter . . . . . 333.3.1.1 First Order Approximated Fractional Low Pass Filter . . 363.3.1.2 Higher Order Approximated Fractional Low Pass Filter . 38
3.3.2 FPAA Realization of a Fractional High Pass Filter . . . . . . . . . 393.3.2.1 First Order Approximated Fractional High Pass Filter . . 403.3.2.2 Higher Order Approximated Fractional High Pass Filter . 42
3.3.3 Simulation and Experimental Results . . . . . . . . . . . . . . . . 423.3.3.1 Experimental Low Pass Fractional Step Filters . . . . . . 443.3.3.2 Experimental High Pass Fractional Step Filters . . . . . . 47
3.3.4 Application of a Fractional Step Filter . . . . . . . . . . . . . . . . 503.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4 EQUAL RIPPLE FRACTIONAL LAPLACIAN APPROXIMATION 554.1 Modified Approximation For Ripple Manipulation . . . . . . . . . . . . . 57
4.1.1 Stability Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . 574.1.2 Error Ripple Manipulation . . . . . . . . . . . . . . . . . . . . . . 594.1.3 Equi-Ripple Approximation . . . . . . . . . . . . . . . . . . . . . 594.1.4 Cumulative Error . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4.2 Application to Fractional Filters . . . . . . . . . . . . . . . . . . . . . . . 634.2.1 Simulation and Experimental Results . . . . . . . . . . . . . . . . 63
4.3 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5 TOW-THOMAS BIQUAD REALIZED WITH FRACTIONAL CAPACITOR 695.1 Tow-Thomas Biquad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
5.1.1 Fractional Tow-Thomas Biquad . . . . . . . . . . . . . . . . . . . 725.2 Simulation and Experimental Results . . . . . . . . . . . . . . . . . . . . . 73
vi

5.2.1 PSPICE Simulations of the Fractional Tow-Thomas Biquad . . . . 765.3 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
6 CONCLUSIONS AND FUTURE WORK 816.1 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 816.2 Contribution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 826.3 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
BIBLIOGRAPHY 85
A FPAA EXPERIMENTAL RESULTS OF FRACTIONAL STEP FILTERS 91A.0.1 Fractional Low Pass Filters . . . . . . . . . . . . . . . . . . . . . . 91A.0.2 Fractional High Pass Filter Magnitude Responses . . . . . . . . . . 91
B REALIZATION OF AN APPROXIMATED FRACTIONAL CAPACITOR 100
vii
LIST OF TABLES
2.1 k2,3 values selected for minimum passband error for first order FLPFs oforders (1+a) = 1.1, 1.5, and 1.9. . . . . . . . . . . . . . . . . . . . . . . 12
2.2 Minimum root angle in W -plane for increasing (n+a) = 1.1 to 5.9. Notestability requires |qW |> 9�when m = 10. . . . . . . . . . . . . . . . . . . 16
3.1 d0,1,2 and e0,1,2 values for decomposed 1st and 2nd order transfer functionsto realize an approximated FLPF of orders 1.1, 1.5, and 1.9. . . . . . . . . 25
3.2 Normalized resistor values to realize 2nd order block of approximated FLPFof orders (1+a) = 1.1, 1.5, and 1.9 using STAR-SAB design equations. . 27
3.3 Normalized resistor values to realize 1st order block of approximated FLPFof orders (n+a) = 1.1, 1.5, and 1.9. . . . . . . . . . . . . . . . . . . . . . 28
3.4 Standard E96 resistor values to realize approximated FLPF of order (n+a) = 1.1, 1.5, and 1.9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.5 Theoretical, simulated, and experimental stopband attenuations of approx-imated (1+a) order FLPF. . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.6 Theoretical and realized CAM values for physical implementation of theapproximated first order FLPFs. . . . . . . . . . . . . . . . . . . . . . . . 38
3.7 d0,1,2 and e0,1,2 values for decomposed 1st and 2nd order transfer functionsto realize an approximated FHPF of orders 1.1, 1.5, and 1.9. . . . . . . . . 40
3.8 Theoretical and realized CAM values for physical implementation of theapproximated first order FHPFs. . . . . . . . . . . . . . . . . . . . . . . . 41
3.9 Theoretical, simulated, and experimental stopband attenuations of approx-imated (1+a) order FLPF realized using FPAA. . . . . . . . . . . . . . . 46
3.10 Theoretical, simulated, and experimental stopband attenuations of approx-imated (4+a) order FLPF realized using FPAA. . . . . . . . . . . . . . . 49
3.11 Theoretical, simulated, and experimental stopband attenuations of approx-imated (1+a) order FHPF realized using FPAA. . . . . . . . . . . . . . . 49
3.12 Theoretical, simulated, and experimental stopband attenuations of approx-imated (4+a) order FHPF realized using FPAA. . . . . . . . . . . . . . . 52
viii

3.13 Signal power of tones at 3kHz and 10kHz after application to approximatedFHPFs of orders (4+a) = 4.1 to 4.9 in steps of 0.2 . . . . . . . . . . . . 53
4.1 Cumulative error of both magnitude and phase equi-ripple responses com-pared to the original approximation. . . . . . . . . . . . . . . . . . . . . . 62
4.2 Realized CAM values for physical implementation of the 1.8 order FLPFsrealized using the original and equi-ripple approximation, (4.1) and (4.3),respectively. Note b = 3.8382 for the equi-ripple magnitude approximation. 66
4.3 Realized CAM values for physical implementation of the approximatedFLPFs using equi-ripple magnitude approximation. Note b = 3.2907, 3.4199,and 3.8382 for (1+a) = 1.2, 1.5, and 1.8, respectively. . . . . . . . . . . . 66
4.4 Theoretical, simulated, and experimental stopband attenuations of (1+a)
order FLPF approximated with equi-ripple approximation realized usingan FPAA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5.1 Component values to realize 2nd order Butterworth LP response with cutofffrequency of 500Hz using the Tow-Thomas Biquad. . . . . . . . . . . . . . 73
5.2 Component values to realize approximated fractional capacitors of 6.5nFand 68nF centered around 500Hz when a = 0.5 using RC ladder topologyof inset in Fig. 5.5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
5.3 Component values used to simulate in PSPICE the fractional Tow-Thomasbiquads of Fig. 5.5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
5.4 Theoretical, simulated, and experimental stopband attenuations of frac-tional Tow-Thomas biquad realized with the Arbre fractional capacitor. . . 80
ix

LIST OF FIGURES
1.1 Gain characteristic of ideal low pass filter. . . . . . . . . . . . . . . . . . . 21.2 Magnitude response of lowpass Butterworth filter as order increases from
n = 1 to n = 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
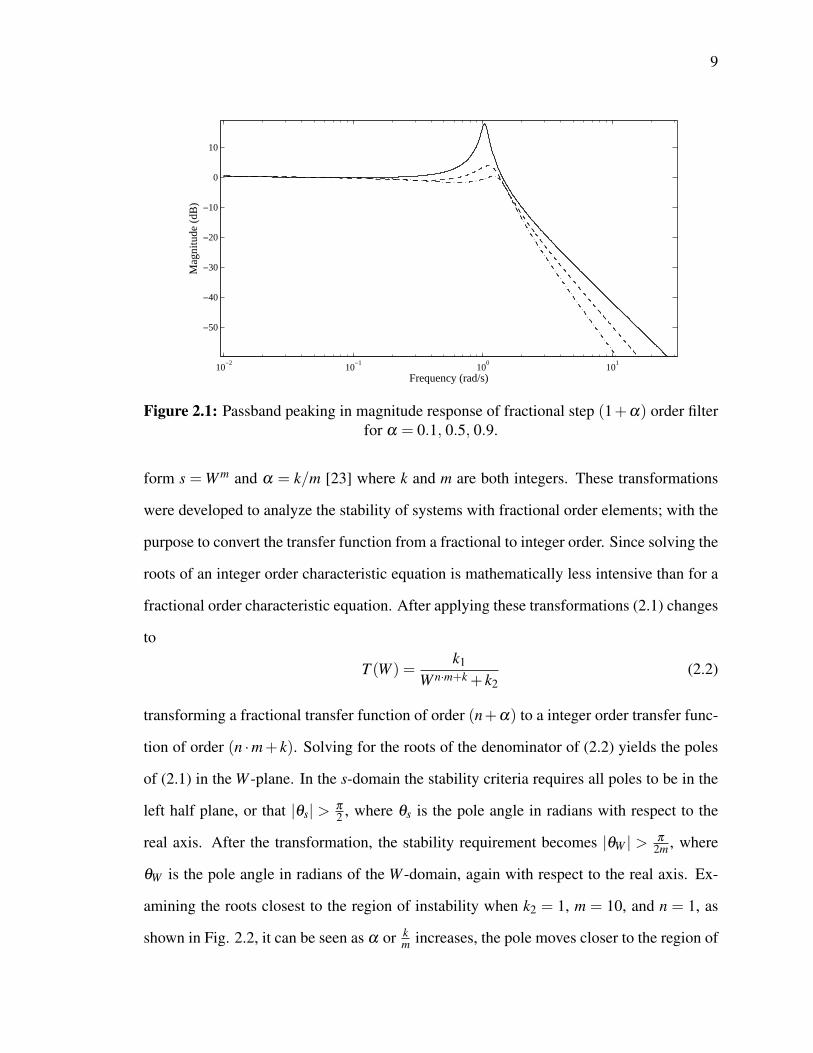
2.1 Passband peaking in magnitude response of fractional step (1+a) orderfilter for a = 0.1, 0.5, 0.9. . . . . . . . . . . . . . . . . . . . . . . . . . . 9
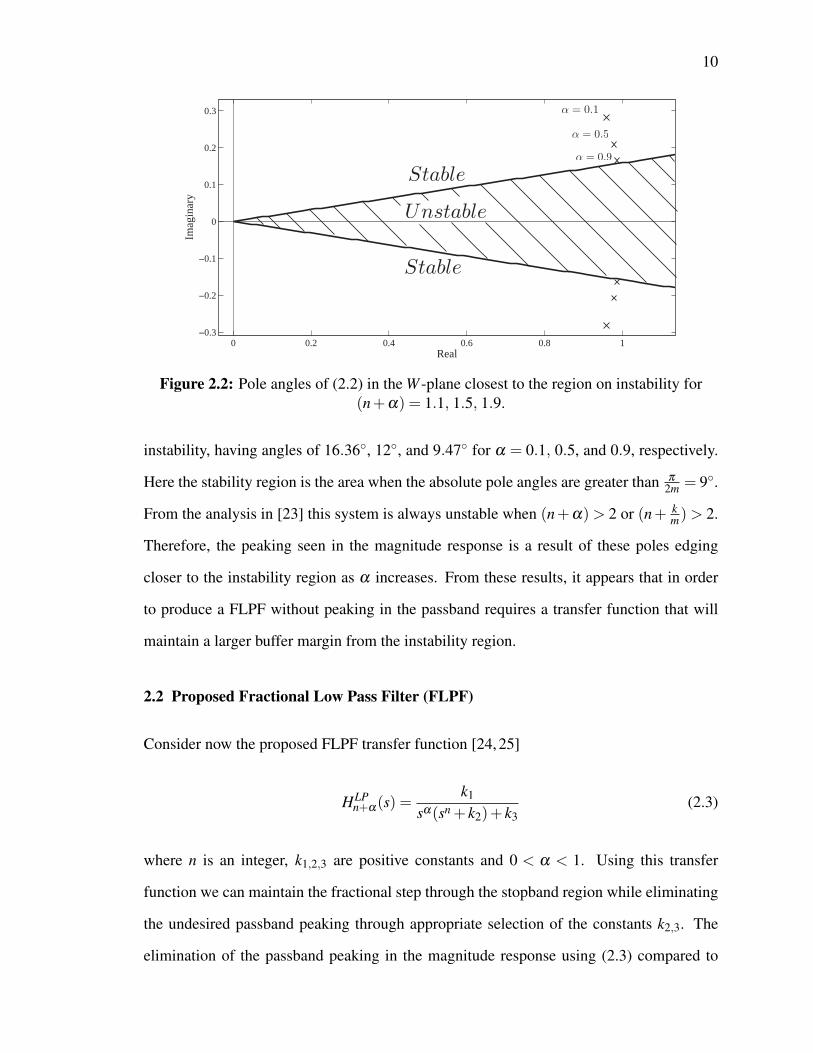
2.2 Pole angles of (2.2) in the W -plane closest to the region on instability for(n+a) = 1.1, 1.5, 1.9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.3 Comparison of FLPF transfer functions of order (n+a) = 1.9. . . . . . . . 112.4 Values of k2,3 to yield minimum passband error compared to the 1st order
butterworth response. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.5 Magnitude response of FLPFs of order (1+a) = 1.1, 1.5, and 1.9 when
k2,3 are selected for minimum passband error. . . . . . . . . . . . . . . . . 132.6 w3dB value for FLPFs of order (1+a) when k2,3 selected for minimum
passband error. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.7 Stability boundaries in the k2 �a plane for the values of k3 = 0.01,0.1,1
and 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.8 Minimum root angles of FLPF characteristic equations in W -plane com-
pared to stability criteria when m = 100. . . . . . . . . . . . . . . . . . . . 162.9 Magnitude response of higher order FLPF with fractional steps from 5.1 to
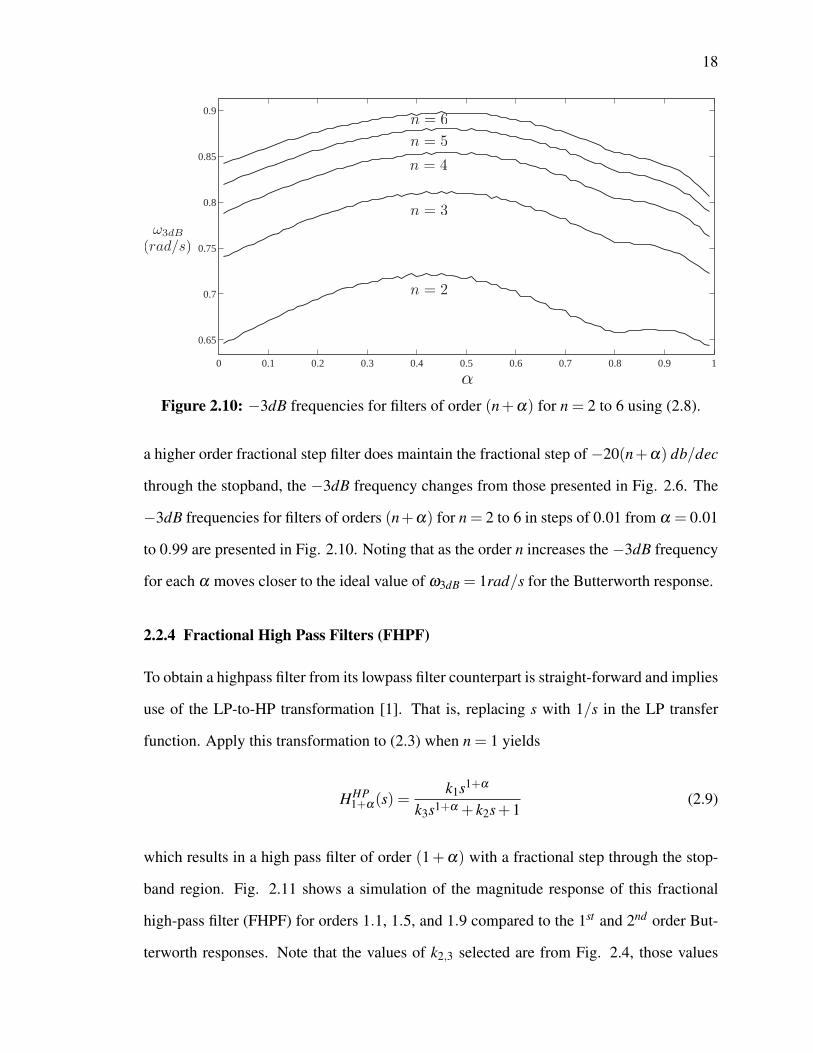
5.9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.10 �3dB frequencies for filters of order (n+a) for n = 2 to 6 using (2.8). . . 182.11 Magnitude response of fractional highpass filters of orders 1.1, 1.5, and 1.9. 192.12 Magnitude response of higher order FHPF with fractional steps from 4.1 to
4.9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.1 Magnitude and phase of s0.5 using 2nd order approximation (dashed) com-pared to ideal case (solid). . . . . . . . . . . . . . . . . . . . . . . . . . . 22
x

3.2 Plot of k2 and k3 versus a that yields minimum passband error in (3.2) andthe interpolated functions as solid and dashed lines, respectively. . . . . . . 23
3.3 Circuit topology of the STAR single-amplifier biquad circuit. . . . . . . . . 253.4 Parallel RC network in the feedback portion of an inverting op-amp to re-
alize a first order transfer function. . . . . . . . . . . . . . . . . . . . . . . 283.5 Circuit topology used in the approximation to the fractional low pass filter
of order (1+a) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293.6 (a) Printed circuit board layout and (b) populated board to realize approxi-
mated FLPF of Fig. 3.5. . . . . . . . . . . . . . . . . . . . . . . . . . . . 313.7 (a) Measured and PSPICE simulation results of the magnitude response of
the approximated (1+a) order FLPF, shown as solid and dashed lines,respectively. (b) Step response of approximated 1.9 order FLPF. . . . . . . 32
3.8 Internal switched capacitor circuits on the FPAA to realize the (a) low passbilinear and (b) pole/zero biquadratic transfer functions. . . . . . . . . . . . 35
3.9 First order approximated FLPF implementation using the bilinear and bi-quadratic filter CAMs of the AnadigmDesigner tools for implementationon the AN231E04 FPAA. . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.10 Parameter setup environment of the AnadigmDesigner tools for the (a) bi-linear and (b) biquadratic filter CAMs. . . . . . . . . . . . . . . . . . . . . 37
3.11 Fourth order approximated FLPF implementation using the bilinear and bi-quadratic filter CAMs of the AnadigmDesigner2 tools for implementationon the AN231E04 FPAA. . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.12 First order approximated FHPF implementation using the bilinear and bi-quadratic filter CAMs of the AnadigmDesigner2 tools for implementationon the AN231E04 FPAA. . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.13 Fourth order approximated FHPF implementation using the bilinear and bi-quadratic filter CAMs of the AnadigmDesigner2 tools for implementationon the AN231E04 FPAA. . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.14 (a) AN231E04 FPAA development kit from Anadigm used to realize frac-tional step filters; (b) test setup to measure the magnitude response of cir-cuits implemented on the AN231E04 with a HP4395A Network analyzer. . 43
3.15 Circuits to realize the (a) level-shifting, single-to-differential and (b) differential-to-single signal conversions to interface the AN231 FPAA with the HP4395Anetwork analyzer. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.16 Block diagram of test setup with conversion circuits required to interfacethe AN231 FPAA and the HP4395A network analyzer. . . . . . . . . . . . 46
xi

3.17 MATLAB simulation and FPAA experimental results of the (a) magnitudeand (b) phase responses of the approximated (1+a) order FLPF shown assolid and dashed lines, respectively. . . . . . . . . . . . . . . . . . . . . . 47
3.18 MATLAB simulation and FPAA experimental results of the (a) magnitudeand (b) phase responses of the approximated (4+a) order FLPF shown assolid and dashed lines, respectively. . . . . . . . . . . . . . . . . . . . . . 48
3.19 MATLAB simulation and FPAA experimental results of the (a) magnitudeand (b) phase responses of the approximated (1+a) order FHPFs shownas solid and dashed lines, respectively. . . . . . . . . . . . . . . . . . . . . 50
3.20 MATLAB simulation and FPAA experimental results of the (a) magnitudeand (b) phase responses of the approximated (4+a) order FHPFs shownas solid and dashed lines, respectively. . . . . . . . . . . . . . . . . . . . . 51
3.21 Op amp topology with output voltage proportional to the sum of the inputvoltages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.22 Frequency spectrum of approximated 4.5 order FHPF (dashed) comparedto 4th (dotted) and 5th (solid) order highpass Butterworth filters. . . . . . . 54
4.1 Magnitude and phase of ideal (solid) and 2nd order approximation (dashed)of sa when a = 0.7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.2 Absolute error of inner and outer ripples vs. a of approximated sa com-pared to the ideal of both magnitude and phase responses. . . . . . . . . . . 57
4.3 Minimum b required for stability of (4.3) for 0 < a < 1. . . . . . . . . . . 594.4 Magnitude and phase absolute inner and outer ripple error of (4.3) com-
pared to the ideal sa for b values from 2 to 4 when a = 0.7. . . . . . . . . 604.5 b values required for equi-ripple magnitude (solid) and phase (dashed) er-
ror approximation for 0 < a < 1. . . . . . . . . . . . . . . . . . . . . . . . 614.6 equi-ripple magnitude and phase responses for the cases when a = 0.2 and
a = 0.8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 624.7 FLPF implementation using the bilinear filter, biquadratic filter, and invert-
ing gain CAMs of the AnadigmDesigner2 tools. . . . . . . . . . . . . . . . 644.8 Ideal and approximated magnitude responses of (1+a) = 1.8 order FLPFs
using (4.1) and (4.3) as solid, dashed, and dotted lines, respectively. Notethat for all FLPFs k2 = 1.11 and k3 = 0.966 with b = 3.8382 in (4.3). (b)Step response of approximated 1.8 order FLPF using (4.3). . . . . . . . . . 65
xii

4.9 Measured and MATLAB simulation results of the magnitude response ofthe approximated (1+a) order FLPF, shown as dashed and solid lines,respectively. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5.1 (a) Packaged fractional capacitors implemented using photolithographicfractal structures on silicon, based on the (b) Hilbert and (c) Tree fractalstructures. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
5.2 Tow-Thomas biquad topology. . . . . . . . . . . . . . . . . . . . . . . . . 715.3 Magnitude response of Tow-Thomas and fractional Tow-Thomas biquad
low pass function when a = 0.5 as solid and dashed lines, respectively. . . 745.4 (a) Updated impedance model of Hilbert fractional capacitor and (b) up-
dated Tow-Thomas biquad circuit using updated impedance model. . . . . . 765.5 Fractional Tow-Thomas biquad with approximated fractional capacitors re-
alized with RC ladders for PSPICE simulation of circuits with the (a) Arbreand (b) Hilbert FCs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
5.6 Measured (dashed) and PSPICE simulated (solid) results of magnitude re-sponses of fractional Tow-Thomas biquad using Hilbert and Arbre frac-tional capacitors. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
A.1 MATLAB simulation and FPAA experimental results of the (a) magnitudeand (b) phase responses of the approximated (1+a) order FLPFs shownas solid and dashed lines, respectively. . . . . . . . . . . . . . . . . . . . . 92
A.2 MATLAB simulation and FPAA experimental results of the (a) magnitudeand (b) phase responses of the approximated (2+a) order FLPFs shownas solid and dashed lines, respectively. . . . . . . . . . . . . . . . . . . . . 93
A.3 MATLAB simulation and FPAA experimental results of the (a) magnitudeand (b) phase responses of the approximated (3+a) order FLPFs shownas solid and dashed lines, respectively. . . . . . . . . . . . . . . . . . . . . 94
A.4 MATLAB simulation and FPAA experimental results of the (a) magnitudeand (b) phase responses of the approximated (4+a) order FLPFs shownas solid and dashed lines, respectively. . . . . . . . . . . . . . . . . . . . . 95
A.5 MATLAB simulation and FPAA experimental results of the (a) magnitudeand (b) phase responses of the approximated (1+a) order FHPFs shownas solid and dashed lines, respectively. . . . . . . . . . . . . . . . . . . . . 96
A.6 MATLAB simulation and FPAA experimental results of the (a) magnitudeand (b) phase responses of the approximated (2+a) order FHPFs shownas solid and dashed lines, respectively. . . . . . . . . . . . . . . . . . . . . 97
xiii

A.7 MATLAB simulation and FPAA experimental results of the (a) magnitudeand (b) phase responses of the approximated (3+a) order FHPFs shownas solid and dashed lines, respectively. . . . . . . . . . . . . . . . . . . . . 98
A.8 MATLAB simulation and FPAA experimental results of the (a) magnitudeand (b) phase responses of the approximated (4+a) order FHPFs shownas solid and dashed lines, respectively. . . . . . . . . . . . . . . . . . . . . 99
B.1 Magnitude response of the approximated fractional capacitor (dashed) com-pared to the ideal fractional capacitor of impedance Z(s) = 1/s0.5. . . . . . 101
B.2 RC ladder network to realize 4th order approximated fractional Laplacianoperator. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
B.3 Magnitude response of the approximated fractional capacitor (dashed) com-pared to the ideal fractional capacitor of impedance Z(s) = 1/Cs0.5 afterapplying the scalings when C = 6.8nF and wc = 1000rad/s. . . . . . . . . 103
B.4 MAPLE code to calculate resistor and capacitor values for the ladder re-alization of a fractional capacitor, Z(s) = 1/Cs0.5, of 6.8nF at a centrefrequency of 500Hz. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
xiv
LIST OF ABBREVIATIONS
CAM - Configurable Analog ModuleCFE - Continued Fraction ExpansionFC - Fractional Capacitor
FLPF - Fractional Low Pass FilterFHPF - Fractional High Pass FilterFPAA - Field Programmable Analog Array
HP - High PassLP - Low Pass
op amp - Operational AmplifierPCB - Printed Circuit BoardSAB - Single Amplifier Biquad
xv

CHAPTER 1
INTRODUCTION
1.1 Traditional Filters
Traditional continuous time filters are electronic circuits used in signal processing to di-
rect, channel, integrate, separate, delay, differentiate, attenuate, and transform all kinds of
electric energy and signals [1]. These filters, whether active or passive, can be grouped into
five basic classes based on the shape of the response in the frequency domain. These five
types in their ideal form include:
1. Low Pass: which passes signals from DC to a selected cutoff frequency, and does not
pass all frequencies above that cutoff frequency.
2. High Pass: which allows all signals above a selected cutoff frequency to pass through,
and does not allow all frequencies below through.
3. Band Pass: allows all signals within a selected bandwidth around a selected fre-
quency to pass, but does not allow all frequencies outside of this range.
4. Band Reject: this allows all signals to pass except a selected bandwidth around a
selected frequency.
5. All-Pass: allows all signals to pass but introduces a predictable phase change for
selected frequencies.
Here for all these types the range of frequencies that are passed are referred to as the pass-
band and the range of frequencies not passed are referred to as the stopband. Note the

2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Frequency (rad/s)
Gai
n
Figure 1.1: Gain characteristic of ideal low pass filter.
ideal filter response of these types would provide no attenuation to all frequencies in the
passband while applying infinite attenuation to all those in the stopband. This ideal low
pass filter is presented in Fig. 1.1, which would transmit all frequencies below the cut-
off frequency, wc, with a gain of 1 and eliminate all frequencies above it with a gain of
0. However, this proves impossible to physically realize and in practice approximations
of the ideal response are instead implemented. The four main approximations, each with
their own distinct advantages and disadvantages, used in implementing electronic filters
are the Butterworth, Chebyshev, Inverse Chebyshev, and Elliptic functions [2]; providing
a maximally flat passband, equal ripple passband, equal ripple stopband, or equal ripple
passband and stopband, respectively. Each of these functions becomes a closer approxi-
mation of the ideal case as the order, n, of the filter increases, where n is an integer value.
These changes in the lowpass Butterworth magnitude characteristics as the order increases
from n = 1 to n = 7 are shown in Fig. 1.2. The transfer functions that describe the circuits
to realize these responses take the form T (s) = N(s)/D(s) where both N(s) and D(s) are
polynomials described using the Laplacian operator, s, raised to an integer order; i.e. s,
s2, . . .sn. Where the order of the filter, n, is chosen to meet the required attenuation of the

3
10−1
100
101
−150
−100
−50
0
Frequency (rad/s)
Mag
nit
ud
e (d
B)
Figure 1.2: Magnitude response of lowpass Butterworth filter as order increases fromn = 1 to n = 7.
filter design specifications.
1.1.1 Selection of Order Based on Design Specifications
When designing traditional filters, the order is determined from the attenuation specifica-
tions that the filter needs to meet. These specifications outline the maximum deviation in
the passband and stopband, Kp and Ks, respectively; and the passband and stopband fre-
quencies at which they occur, wp and ws , respectively. From these requirements the design
equations to determine the order using the Butterworth approximation are [2]
W =ws
wp(1.1)
M =
s100.1Ks �1100.1Kp �1
(1.2)
nB =ln(M)
ln(W)(1.3)
where nB is the order of the Butterworth filter to meet the design requirements. The value
of nB from (1.3) is rarely an integer, which is required for the implementation of the filter,
so in practice it is rounded up to the next integer value. It is this requirement that results

4
in the integer order stepping in the magnitude characteristics of Fig. 1.2. However, by
importing concepts of fractional calculus, we are able to design filters with more precise
control over the stopband characteristics.
1.2 Fractional Calculus
Fractional calculus, the branch of mathematics concerning differentiation and integration
to noninteger orders, is not a new field. With Leibniz writing as early as 1695 about a
12 derivative,
⇣d
12 x⌘
, he commented quite prophetically “from which one day useful con-
sequences will be drawn”. However, the first major study of fractional calculus was not
laid out until 1832 by Liouville in “Memoire sur quelques Questions de Geometrie et de
Mecanique, et sur un noveau genre de Calcul pour resoudre ces Questions” [3].
Where traditional differentiation takes the form dn
dtn f (t), where n is an integer; using
fractional calculus the value of n can be non-integer order, such as 1.3,p
2, 4 � 3i or
any other real or imaginary order. The Riemann-Liouville definition [3–5] of a fractional
derivative, where n�1 < a < n is defined as
da
dta f (t)⌘ Da f (t) =da
dta
2
4 1G(n�a)
tZ
0
f (t)(t � t)a�n+1 dt
3
5 (1.4)
and the definition of a fractional integral where 0 < a < 1 is given as
D�a f (t) =1
G(a)
Z t
0
f (t)(t � t)1�a dt (1.5)
where G(·) is the gamma function. Another interpretation of the fractional derivative is
given by the Grünwald-Letnikov approximation as
Da f (t), limDT!0
(DT )�a
G(�a)
•
Âj=0
G( j�a)
G( j+1)f (t � jDT ) (1.6)
where DT is the integration step. While there are no physical analogies to these derivatives,

5
like slope or area under the curve, they still have many useful applications in diverse fields
of engineering. These include materials theory, diffusion theory, bioengineering, circuit
theory and design [6], control theory [7,8], electromagnetics [9], and robotics [10,11]. The
import of these concepts into circuit theory is relatively new, and has shown applications
in transmission media [3], power electronics [12], integrator [13, 14] and differentiator
circuits [15], oscillators [16], multivibrator circuits [17], and filter theory [18–21] with
potentially many other applications.
1.2.1 Fractional Laplacian Operator
The Laplace transform is a very useful tool in the design and analysis of electronic circuits,
transforming the circuit from the time domain to the frequency domain. This is especially
useful because it allows for the analysis of circuits using algebraic rather than differential
equations [22]. This transformation when applied to a time domain function, f (t), is given
by
L{ f (t)}= F(s) =Z •
0�f (t)e�stdt
where F(s) is the transformed function in the frequency domain, and s is the Laplacian
operator. By applying this transformation to the standard circuit elements of a capacitor
and inductor, with zero initial conditions, we obtain their impedance characteristics in the
frequency domain described as
ZC(s) =1
sCZL(s) = sL
where ZC,L are the impedance of the capacitor and inductor, respectively, in the frequency
domain. While the Laplacian operator in electronic filters has traditionally been raised
to an integer order, it is mathematically valid to raise to a non-integer order, sa , where
0 < a < 1, effectively representing a fractional-order system. Hence, after applying the
6
Laplace transform, with zero initial conditions, to the fractional derivative (1.4) yields
L{0dat f (t)}= saF(s) (1.7)
where sa is the fractional Laplacian operator. The use of the fractional Laplacian opera-
tor allows for the design and analysis of systems using concepts from fractional calculus
without having to solve the difficult time domain representations.
1.3 Research Objectives
While the area of electronic filters is one of the few areas of electrical engineering with a
well defined design procedure; the import of concepts from fractional calculus allows for
the creation of a more general design procedure. With the potential for filters to be designed
to meet the exact design requirements of attenuation, phase, or delay specifications. This
idea of generalizing filter design is a very new field [18,19,21], with much work that needs
to be accomplished in order to create a more generalized filter design procedure.
This research is dedicated to the exploration and importing of concepts from fractional
calculus into continuous time filter design. We accomplish this by exploring previously
proposed fractional step filters which exhibit undesired passband peaking. This leads to the
development of a new fractional step filter, that removes this passband peaking from the
magnitude response of previous filters. Focus has been placed on the design of a fractional
step filter and its physical realization using approximations of the fractional Laplacian op-
erator. The use of fabricated integrated circuit fractional capacitors in the realization of a
biquadratic filter is also explored to realize fractional step filters.
1.4 Thesis Overview
This thesis is divided into three basic areas of research focus. First, the design and imple-
mentation of fractional step filters without the passband peaking of previously proposed

7
filters is presented. Second, a modification of the approximated fractional Laplacian opera-
tor to yield a lower error approximation for use in the physical implementation of fractional
step filters is presented. Finally, the use of fractional capacitors in electronic circuits to ver-
ify the operation of fractional filters is examined.
Chapter 2 begins with a brief introduction to previously designed fractional step filters.
A proposed low pass filter is presented to solve the passband peaking problem experienced
in previous filters. MATLAB simulations of this filter are presented showing the precise
control of the stopband characteristics of a fractional step filter. A method for the imple-
mentation of higher order low pass fractional step filters is also presented with MATLAB
simulations. Last, the application of the low pass to high pass transformation is shown,
again with MATLAB simulations.
Presented in Chapter 3 is the physical realization of these fractional step filters. The de-
sign of these filters using an approximation of the fractional Laplacian operator is outlined,
with physical realizations using operational amplifiers and field programmable analog ar-
rays. Experimental results of these realizations compared to the simulations verify the
operation of these filters.
Chapter 4 presents a modification to a second order approximation of the fractional
Laplacian operator that has lower peak and cumulative error than the original approxi-
mation. This approximation is used in the implementation of fractional step filters with
simulations and experimental results verify its operation.
Presented in Chapter 5 is the use of a fractional capacitor in a Tow-Thomas Biquad
circuit to implement a fractional low pass filter. Theoretical, simulation, and experimental
results presented to verify the operation of a fractional capacitor in an electronic circuit.
Chapter 6 concludes the thesis and suggests improvements for future work.

CHAPTER 2
DESIGN OF FRACTIONAL FILTERS
2.1 Analysis of Previous Fractional Low Pass Filter (FLPF)
The fractional Laplacian operator is especially useful in the design of filters with frac-
tional step characteristics in the stopband; as the design of transfer functions can be done
algebraically rather than through solving the difficult time domain representations of the
fractional derivatives. The transfer function of such a low pass filter is [18]
T (s) =k1
sn+a + k2(2.1)
where n is an integer, k1,2 are positive constants, and 0 < a < 1. The roots of this fractional
equation are s1,2 = k1/(n+a)2 e± j(p/(n+a)) when 1 < n+a < 2. However, when (n+a)< 1
there are no poles in the physical s-plane [18]. Now while this transfer function does pro-
duce a low-pass filter with fractional step of �20(n+a)dB/dec through the stopband,
it also has the undesired quality of having a peak in the passband. This peaking is il-
lustrated for (n+a) = 1.1, 1.5, 1.9 when k1 = k2 = 1 as shown in Fig. 2.1. With the
maximum peak for each case reaching a value of k1/hk2sin (n+a)p
2
i, resulting in peaks at
0.1076, 3.01, 16.11dB for (n+a) = 1.1, 1.5, 1.9, respectively.
2.1.0.1 Roots of the W -plane
To further investigate the cause of the peaking in the magnitude response of (2.1) requires
the transformation from the s-domain to the W -domain through application of the trans-
9
10−2
10−1
100
101
−50
−40
−30
−20
−10
0
10
Frequency (rad/s)
Mag
nit
ud
e (d
B)
Figure 2.1: Passband peaking in magnitude response of fractional step (1+a) order filterfor a = 0.1, 0.5, 0.9.
form s = W m and a = k/m [23] where k and m are both integers. These transformations
were developed to analyze the stability of systems with fractional order elements; with the
purpose to convert the transfer function from a fractional to integer order. Since solving the
roots of an integer order characteristic equation is mathematically less intensive than for a
fractional order characteristic equation. After applying these transformations (2.1) changes
to
T (W ) =k1
W n·m+k + k2(2.2)
transforming a fractional transfer function of order (n+a) to a integer order transfer func-
tion of order (n ·m+ k). Solving for the roots of the denominator of (2.2) yields the poles
of (2.1) in the W -plane. In the s-domain the stability criteria requires all poles to be in the
left half plane, or that |qs| > p2 , where qs is the pole angle in radians with respect to the
real axis. After the transformation, the stability requirement becomes |qW | > p2m , where
qW is the pole angle in radians of the W -domain, again with respect to the real axis. Ex-
amining the roots closest to the region of instability when k2 = 1, m = 10, and n = 1, as
shown in Fig. 2.2, it can be seen as a or km increases, the pole moves closer to the region of
10
0 0.2 0.4 0.6 0.8 1−0.3
−0.2
−0.1
0
0.1
0.2
0.3
Real
Imag
inar
y
Figure 2.2: Pole angles of (2.2) in the W -plane closest to the region on instability for(n+a) = 1.1, 1.5, 1.9.
instability, having angles of 16.36�, 12�, and 9.47� for a = 0.1, 0.5, and 0.9, respectively.
Here the stability region is the area when the absolute pole angles are greater than p2m = 9�.
From the analysis in [23] this system is always unstable when (n+a)> 2 or (n+ km)> 2.
Therefore, the peaking seen in the magnitude response is a result of these poles edging
closer to the instability region as a increases. From these results, it appears that in order
to produce a FLPF without peaking in the passband requires a transfer function that will
maintain a larger buffer margin from the instability region.
2.2 Proposed Fractional Low Pass Filter (FLPF)
Consider now the proposed FLPF transfer function [24, 25]
HLPn+a(s) =
k1
sa(sn + k2)+ k3(2.3)
where n is an integer, k1,2,3 are positive constants and 0 < a < 1. Using this transfer
function we can maintain the fractional step through the stopband region while eliminating
the undesired passband peaking through appropriate selection of the constants k2,3. The
elimination of the passband peaking in the magnitude response using (2.3) compared to

11
10−2
10−1
100
101
102
−80
−70
−60
−50
−40
−30
−20
−10
0
10
20
Frequency (rad/s)
Mag
nit
ude
(dB
)
Figure 2.3: Comparison of FLPF transfer functions of order (n+a) = 1.9.
(2.1) is shown in Fig. 2.3 for the case when 1+a = 1.9 and constants k2 = 1.31 and
k3 = 0.99. Notice that the passband of (2.3) remains flat while (2.1) has a peak of 16.11dB.
2.2.1 Selection of k2,3 for Flat Passband Response
By modifying k2,3 in (2.3) the passband of the magnitude response can be shaped without
altering the stopband region. Therefore, through their careful selection the passband region
can be shaped to better resemble the passband of a Butterworth response while maintaining
the desired fractional step. That is, the selection of the constants k2,3 when k1 = 1 for
minimum passband error can be done numerically; with the cumulative magnitude error
compared to the Butterworth response through the passband calculated up until the �3dB
frequency w0. The combination of k2 and k3 that yield the lowest cumulative error selected
for each a . This cumulative magnitude error, |EC( jw)|, is calculated as
|EC( jw)|=N
Âi=1
�� |B1( jwi)|���HLP
1+a( jwi)�� �� (2.4)

12
Order (1+a) k2 k3
1.1 0.245 0.831.5 0.594 0.9121.9 1.315 0.986
Table 2.1: k2,3 values selected for minimum passband error for first order FLPFs of orders(1+a) = 1.1, 1.5, and 1.9.
where |B1( jwi)| is the magnitude response at frequency wi of the first order low-pass But-
terworth filter,��HLP
1+a( jwi)�� is the magnitude response of the FLPF of order (1+a) at
frequency wi, and N is the number of samples. For our analysis N = 200 where the range
of frequencies is w e [0.01,1]. For each value of a between 0.01 and 0.99 in steps of 0.01,
the cumulative error was calculated for all combinations of 0 < k2 < 2 and 0 < k3 < 1 in
steps of 0.001. From all the cumulative errors collected for each a , the combination that
resulted in the minimum error was selected. These values that yield the minimum passband
error as well the interpolated functions to match the collected data are shown in Fig. 2.4 as
solid and dashed lines, respectively. The interpolated quadratic and linear functions from
the collected raw data for k2,3, respectively, are
k2 = 1.1796a2 +0.16765a +0.21735 (2.5)
k3 = 0.19295a +0.81369 (2.6)
with a norm of residuals, R, of 0.090685 and 0.024265 for the interpolated functions of k2
and k3, respectively. This norm of residuals is calculated from the fit residuals, defined as
the difference between the ordinate data point and the resulting fit for each abscissa data
point; with a lower norm value indicating a better fit than a larger value.
The magnitude response of FLPFs of order (1+a) = 1.1, 1.5, and 1.9 when the values
of k2,3 for minimum passband error are used are shown in Fig. 2.5. The values of k2,3
selected for minimum passband error for these filters are given in Table 2.1. Note that
these values do not produce a true fractional Butterworth response as the DC gain, k1/k3,

13
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Figure 2.4: Values of k2,3 to yield minimum passband error compared to the 1st orderbutterworth response.
10−2
10−1
100
101
102
−90
−80
−70
−60
−50
−40
−30
−20
−10
0
10
Frequency (rad/s)
Mag
nit
ude
(dB
)
Figure 2.5: Magnitude response of FLPFs of order (1+a) = 1.1, 1.5, and 1.9 when k2,3are selected for minimum passband error.
is not unity and a �3dB frequency of 1rad/s is not maintained. It instead provides a flat
passband response with the minimum error when compared to the 1st order Butterworth
over the frequency range 0.01rad/s to 1rad/s. It is still possible to set the DC gain of
these filters to unity by setting k1 = k3, which still maintains the flat passband of the filter.

14
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0.9
0.95
1
1.05
1.1
1.15
Figure 2.6: w3dB value for FLPFs of order (1+a) when k2,3 selected for minimumpassband error.
In addition, the �3dB frequency, w3dB, of (2.3) is nonlinearly dependent on the values of
k2,3 and a . The numerical solution of w3dB, for 0 < a < 1 in steps of 0.01 for FLPFs of
order (1+a) when k2,3 are selected for minimum passband error are shown in Fig. 2.6.
Note that the maximum and minimum deviations occur at a = 0.45 and 0.99 with �3dB
frequencies of 1.1602rad/s and 0.8917rad/s, respectively. In the section that follows we
examine the stability analysis of the proposed equation (2.3).
2.2.2 Stability Analysis
To analyze the stability of the proposed FLPF we transform the transfer function from the
s-plane to the W -plane, again using the transformations s = W m and a = k/m [23]. After
applying this transformation, (2.3) changes to,
T (W ) =k1
W n·m+k + k2W k + k3(2.7)
whose characteristic equation in the W -plane must be solved to ensure that it meets the
stability criteria. Setting the denominator of (2.7) to zero and solving for W yields (n ·m+k)

15
-10
-8
-6
-4
-2
0
0 0.2 0.4 0.6 0.8 1
Figure 2.7: Stability boundaries in the k2 �a plane for the values of k3 = 0.01,0.1,1 and10.
roots. Stability requires that | qW |> p2m for all poles of the characteristic equation, where
qW is the pole angle in radians. If any of the pole angles do not meet this criteria then the
system is unstable. Through numerical analysis of this characteristic equation it was found
that the system is always unstable when n+ (k/m) > 2 regardless of the values of k2,3.
While for the region n+(k/m)< 2 there are always values of k2,3 that will ensure stability
of the system. An example of the stability boundary in the k2 �a plane to four values of
k3 are shown in Fig. 2.7 for the case of m = 100 and n = 1.
2.2.2.1 Minimum Root Angle in W -plane
Where previously the roots of the (2.2) were shown to move very close to the region of
instability as a approaches the stability limit, the roots of (2.7) maintain a much larger
margin from the unstable region. The differences between the minimum angle of the roots
for the characteristic equations (2.2) and (2.7), when n = 1 and the k2,3 values are selected
for minimum passband error, are shown in Fig. 2.8. Where the solid line is the minimum

16
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.8
0.9
1
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
k/m
An
gle
(d
egre
es)
Figure 2.8: Minimum root angles of FLPF characteristic equations in W -plane comparedto stability criteria when m = 100.
Minimum Root Angle (�)n a = 0.1 a = 0.3 a = 0.5 a = 0.7 a = 0.91 16.71 14.89 13.86 13.50 13.752 8.67 8.15 7.84 7.72 7.773 5.85 5.61 5.46 5.39 5.404 4.41 4.28 4.19 4.15 4.145 3.55 3.46 3.40 3.37 3.36
Table 2.2: Minimum root angle in W -plane for increasing (n+a) = 1.1 to 5.9. Notestability requires |qW |> 9�when m = 10.
angle required for stability when m = 100, with all values above lying in the stable region
and all those below in the unstable region. Note that as k/m increases the minimum root
angle of (2.2) moves closer to the instability region, whereas the minimum root angle of
(2.7) maintains a much larger margin of stability. Using the values for minimum passband
error, as the order n of the filter increases the minimum root angle of (2.7) is within the
unstable region regardless of the value of a . A sample of these minimum angles are given
in Table 2.2. All of the values for n > 1 are within the unstable region, being less than the
angle required for stability, |qW | < p2m = 9�. Hence, to maintain stability the order of the
filter must be limited to an order of (n+a) < 2 because increasing n above 1 moves the
minimum root angle of the characteristic equation into the unstable region of the W -plane.

17
10−1
100
101
102
−250
−200
−150
−100
−50
0
Frequency (rad/s)
Mag
nit
ude
(dB
)
Figure 2.9: Magnitude response of higher order FLPF with fractional steps from 5.1 to5.9.
2.2.3 Implementation of Higher Order Fractional Low Pass Filters (FLPF)
While the highest order that (2.3) can implement while maintaining stability without the
undesired passband peaking is n+a < 2, one method of implementing higher order filters
with fractional step is to employ HLP1+a(s), which always has a stable region based on k2,3
when 0 < a < 1 , divided by a higher-order normalized Butterworth polynomial [26]. This
creates a stable higher order fractional step filter of order n+a which can be written as,
HLPn+a(s) =
HLP1+a(s)
Bn�1(s); n � 2 (2.8)
where Bn(s) is a standard Butterworth polynomial of order n. Using this method we can cre-
ate stable higher order filters with a fractional step through the stopband while maintaining
the flat passband response. Figure 2.9 displays the magnitude response of the fractional-
step lowpass filter of order (5+a) for values of a =0.1, 0.5, 0.9. Note that the values of
k2,3 used in the higher order filter to minimize the passband error are the same as those cal-
culated for filters of order (1+a) presented in Fig. 2.4. While this method of implementing
18
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0.65
0.7
0.75
0.8
0.85
0.9
Figure 2.10: �3dB frequencies for filters of order (n+a) for n = 2 to 6 using (2.8).
a higher order fractional step filter does maintain the fractional step of �20(n+a) db/dec
through the stopband, the �3dB frequency changes from those presented in Fig. 2.6. The
�3dB frequencies for filters of orders (n+a) for n = 2 to 6 in steps of 0.01 from a = 0.01
to 0.99 are presented in Fig. 2.10. Noting that as the order n increases the �3dB frequency
for each a moves closer to the ideal value of w3dB = 1rad/s for the Butterworth response.
2.2.4 Fractional High Pass Filters (FHPF)
To obtain a highpass filter from its lowpass filter counterpart is straight-forward and implies
use of the LP-to-HP transformation [1]. That is, replacing s with 1/s in the LP transfer
function. Apply this transformation to (2.3) when n = 1 yields
HHP1+a(s) =
k1s1+a
k3s1+a + k2s+1(2.9)
which results in a high pass filter of order (1+a) with a fractional step through the stop-
band region. Fig. 2.11 shows a simulation of the magnitude response of this fractional
high-pass filter (FHPF) for orders 1.1, 1.5, and 1.9 compared to the 1st and 2nd order But-
terworth responses. Note that the values of k2,3 selected are from Fig. 2.4, those values

19
10−2
10−1
100
101
102
−80
−70
−60
−50
−40
−30
−20
−10
0
Mag
nit
ude
(dB
)
Frequency (rad/s)
Figure 2.11: Magnitude response of fractional highpass filters of orders 1.1, 1.5, and 1.9.
for minimum passband error for the FLPFs. Using these values maintains the flat passband
response after application of the lowpass to highpass transformation.
2.2.4.1 Higher Order Fractional High Pass Filter
Higher order FHPFs are obtained using the same method described for the FLPF. Where the
low-pass filter was divided by a normalized Butterworth polynomial, the high-pass filter is
divided by the normalized Butterworth polynomial after applying the lowpass-to-highpass
transformation. This creates a higher order high-pass fractional filter of order n+a that
can be written as
HHPn+a(s) =
HHP1+a(s)
BHPn�1(s)
; n � 2 (2.10)
where BHPn (s) is a standard Butterworth polynomial of order n after applying the LP to HP
transformation. Fig. 2.12 displays the magnitude response of the fractional-step highpass
filter of order (4+a) for values of a = 0.1, 0.5, 0.9. Note that the values of k2,3 for flat
passband response in the higher order filters of Fig. 2.12 are again the same as those for
the lowpass filters of order (1+a), presented in Fig. 2.4.

20
10−2
10−1
100
101
102
−200
−180
−160
−140
−120
−100
−80
−60
−40
−20
0
Frequency (rad/s)
Mag
nit
ud
e (d
B)
Figure 2.12: Magnitude response of higher order FHPF with fractional steps from 4.1 to4.9.
2.3 Summary
This chapter first examined the cause of the passband peaking in previously proposed frac-
tional low pass filters [18]. An understanding of the problem led to the proposal of a new
fractional low pass transfer function that maintains the fractional step through the stopband
while maintaining a flat passband. The stability of this fractional step filter was investi-
gated, showing it is always stable for orders (n+a) < 2. To realize fractional step filter
of orders (n+a) > 2 a method using the first order FLPF divided by a Butterworth poly-
nomial of order (n� 1) to implement the desired order was proposed. The application
of the lowpass to highpass transformation was presented to create a fractional high pass
filter, with the same method presented to create higher order high pass fractional step fil-
ters. MATLAB simulations were presented to confirm the low and high pass fractional step
filters and the method to implement them in orders greater than (n+a)> 2.

CHAPTER 3
PHYSICAL REALIZATION OF FRACTIONAL FILTERS
3.1 Approximation of the Fractional Laplacian Operator
The use of the fractional Laplacian operator, sa , has theoretically been shown to produce
filters with a fractional step through the stopband [18, 19, 21]. However, there are no com-
mercial fractance devices available for the physical realization of these filters. While most
capacitors do exhibit fractional behaviour [27, 28] and should be modeled with impedance
ZC = 1saC , the value of a is very near to 1 preventing their use in implementing fractional
filters with complete control of the stopband attenuations. Therefore, until commercial
fractance devices become available to physically realize circuits that make use of the ad-
vantages of sa , integer order approximations have to be used. There are many methods
used to create an approximation of sa that include Continued Fraction Expansions (CFEs)
as well as rational approximation methods [7, 29–32]. These methods present a large array
of approximations with varying order and accuracy, with the accuracy and approximated
frequency band increasing as the order of the approximation increases. Using the CFE
method of [32] we obtain the following approximation for the general Laplacian operator
to 2nd order as
sa u (a2 +3a +2)s2 +(8�2a2)s+(a2 �3a +2)(a2 �3a +2)s2 +(8�2a2)s+(a2 +3a +2)
(3.1)
Note that when a = 0.5, (3.1) reverts back to the approximation of s0.5 in [32]. Figure
3.1 shows an example of the magnitude and phase of the approximation of the fractional

22
10−2
10−1
100
101
102
−20
−10
0
10
20
Frequency (rad/s)
Mag
nit
ude
(dB
)
Ideal
2nd Order Approximation
10−2
10−1
100
101
102
0
20
40
60
Frequency (rad/s)
Phas
e (d
egre
es)
Figure 3.1: Magnitude and phase of s0.5 using 2nd order approximation (dashed)compared to ideal case (solid).
Laplacian operator for the case when a = 0.5 compared to the ideal case. For this case it
can be observed that for w 2 [0.032,31.53] the magnitude error does not exceed 1.375dB
while for w 2 [0.142,7.00] the phase error does not exceed 3.2�. Using a second order
approximation for the Laplacian operator results in an (n+2) integer order filter to approx-
imate the (n+a) fractional step filter. This is less expensive to implement in hardware
over approximations of higher order [7, 33]. While (3.1) forms the basis of this chapter,
in Chapter 4 we present a means of creating an equal ripple approximation of the second
order approximated fractional Laplacian operator.
Using (3.1) it can be shown that the transfer function for the FLPF between 1st and 2nd
order changes to,
HLP1+a =
k1
sa(s+ k2)+ k3
u k1
a0
(a2s2 +a1s+a0)
s3 + c0s2 + c1s+ c2(3.2)
where a0 = a2 + 3a + 2, a1 = 8� 2a2, a2 = a2 � 3a + 2, c0 = (a1 + a0k2 + a2k3)/a0,

23
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Figure 3.2: Plot of k2 and k3 versus a that yields minimum passband error in (3.2) andthe interpolated functions as solid and dashed lines, respectively.
c1 = (a1(k2 + k3)+ a2)/a0 and c2 = (a0k3 + a2k2)/a0. When using the approximation of
the Laplacian operator, the constants k2,3 that yield the passband closest to the Butterworth
response vary from those used for the ideal transfer function. Using the same process
described in Section 2.2.1, the values that yield the minimum passband error when using
the approximation as well the interpolated functions to match the collected data are shown
in Fig. 3.2 as solid and dashed lines, respectively. The interpolated quadratic and linear
functions from the collected raw data for k2,3, respectively, are
k2 = 1.0683a2 +0.161a +0.3324 (3.3)
k3 = 0.29372a +0.71216 (3.4)
with a norm of residuals, R, of 0.15239 and 0.034421 for the interpolated functions of k2
and k3, respectively. Comparing (2.5) and (2.6) with (3.3) and (3.4), respectively, one can
observe that both k2 and k3 in (2.5) and (2.6) are larger for all a than in (3.3) and (3.4).
This is due to the approximation (3.1) used for sa .

24
3.2 Operational Amplifier Approximated FLPF Implementation
To realize the transfer function of (3.2) we can decompose it into first and second order
transfer functions that can be realized using first order and second order single amplifier bi-
quad (SAB) circuit topologies. For our realization, the two transfer functions we generated
were
H(s) = H1(s) ·H2(s)
=1
s+d0· e0s2 + e1s+ e2
s2 +d1s+d2(3.5)
Coefficients d0,1,2 and e0,1,2 are determined through the solution of the system of equations
by equating like terms of (3.2) and (3.5). The following system of equations yields the
coefficients d0,1,2 and e0,1,2
d0 = RootO f [aox3 � (a1 +a0k2 +a2k3)x2 (3.6)
+(a1k2 +a1k3 +a2)x� (a2k2 +a0k3)]
d1 =a1 +a0k2 +a2k3
a0�d0 (3.7)
d2 =a1k2 +a1k3 +a2
a0�d0d1 (3.8)
e0 = k1a2
a0(3.9)
e1 = k1a1
a0(3.10)
e2 = k1 (3.11)
where x is a dummy variable and d0 is a positive real root of (3.6). The values of d0,1,2
and e0,1,2 using (3.6) to (3.11) and k2,3 from Fig. 3.2 when k1 = 1 for filters of order
(1+a) = 1.1, 1.5, and 1.9 are given in Table 3.1.

25
(n+a) k2k3
d0 d1 d2 e0 e1 e2
(1+0.1)0.350.74 0.3056 4.0467 3.2689 0.7403 3.4545 1.0000
(1+0.5)0.690.86 0.4511 2.4109 2.2125 0.2000 2.0000 1.0000
(1+0.9)1.360.97 0.6920 1.8452 1.4409 0.0120 1.1579 1.0000
Table 3.1: d0,1,2 and e0,1,2 values for decomposed 1st and 2nd order transfer functions torealize an approximated FLPF of orders 1.1, 1.5, and 1.9.
+
-
Figure 3.3: Circuit topology of the STAR single-amplifier biquad circuit.
3.2.1 Realization of the 2nd Order Block H2(s)
The 2nd order block, H2(s), having both poles and zeros can be realized using the STAR-
SAB topology [34] shown in Fig. 3.3.
Given the transfer function, H2(s) = e0s2+e1s+e0s2+d1s+d2 , the component values required to re-
alize it using the STAR-SAB topology can be determined using the following steps [2]
1. Set all capacitors, C, to the value of unity to simplify calculations.
2. Choose a value for the positive-feedback parameter K.

26
3. Choose an impedance normalized value for the resistor Rb. Let Rb = 1W.
4. Determine the values of Rc and Ra from
Rc =Ke0
Ra =K
1� e0
5. To simplify computational steps, two constants x1 and x2 are defined as
x1 =2K
�d1 +q
d21 +8Kd2
x2 =e0 +2e2x2
1 � e1x1
1+K
6. Use the constants x1 and x2 to find the values of R1 and R4 as
R1 =x1
x2
R4 =R1x1
R1 � x1
7. Again, to simplify computations, two additional constants y1 and y2 are defined. The
constant y1 must be selected arbitrarily so that it satisfies 0 y1 1 in order that that
the constant y2 is nonnegative and given by
y2 =(1+K)(e0 � y1)
x1d2(e2/d2 � e0)
8. Use the constants y1 and y2 and other terms to find the values of the resistors R2, R3,

27
(1+a) k2k3
, K, y1
Resistor (W) (1+0.1)0.350.74, 10, 1 (1+0.5)0.69
0.86, 5, 0.1 (1+0.9)1.360.97, 0.1, 0
Ra 38.5000 6.2500 0.1020Rb 1.0000 1.0000 1.0000Rc 13.5088 25.0000 5.0090R1 60.6288 6.7755 4.3630R2 0.0766 0.1064 0.2470R3 1.2700 7.8570 •R4 1.6269 1.7168 0.8204R5 • 0.8730 0.0327
Table 3.2: Normalized resistor values to realize 2nd order block of approximated FLPF oforders (1+a) = 1.1, 1.5, and 1.9 using STAR-SAB design equations.
and R5 as
R2 =y2
x1y2d2 +K
R3 =y2
y1
R5 =R3y2
R3 � y2
Using this design procedure, the resistor values for the cases a = 0.1, 0.5, and 0.9 when
using the values of k2,3 for minimum passband error are calculated and given in Table 3.2.
3.2.2 Realization of the 1st Order Block H1(s)
The 1st order block, H1(s), can be realized using a simple parallel RC network in the
feedback portion of an inverting op-amp as presented in Fig. 3.4. The transfer function of
this topology is given byVo(s)Vin(s)
=� 1R7C
1s+ 1
R6C(3.12)
Using this configuration, the resistor capacitor combination of R6C is used to set the time
constant while R6/R7 is used to set the gain of the circuit. The value of R6 required to
realize the first order block for the approximated FLPF realization can be calculated by

28
+
-
Figure 3.4: Parallel RC network in the feedback portion of an inverting op-amp to realizea first order transfer function.
(1+a) k2k3
Resistor (W) (1+0.1)0.350.74 (1+0.5)0.69
0.86 (1+0.9)1.360.97
R6 3.271 2.216 1.445R7 0.931 0.960 1.060
Table 3.3: Normalized resistor values to realize 1st order block of approximated FLPF oforders (n+a) = 1.1, 1.5, and 1.9.
equating H1(s) from (3.5) with (3.12) yielding:
d0 =1
R6C(3.13)
while the DC gain of this block can be set using:
DC gain =R6
R7(3.14)
Using these design equations, the values of R6 and R7 needed to realize the first order block
of the approximated FLPF for a = 0.1, 0.5, and 0.9 when C = 1F are given in Table 3.3.

29
+
+
-
-
Figure 3.5: Circuit topology used in the approximation to the fractional low pass filter oforder (1+a)
3.2.3 Simulation and Experimental Results
The final circuit topology of the fractional low pass filter of order (1+a) is shown in Fig.
3.5 which is a result of a cascade of the first and second order blocks previously described.
This circuit was simulated using PSPICE for filters of order (1+a) for the cases a =
0.1, 0.5, and 0.9. These simulations were conducted with general purpose MC1458 op
amps (1MHz gain bandwidth product) [35]. All time constants were scaled to 0.1ms using
unit resistors of 1kW and capacitors of 0.1uF . This results in all pole frequencies being
shifted from the normalized value of 1rad/s to 104rad/s. The theoretical resistor values
were rounded to the nearest standard E96 (1%) value and are given in Table 3.4. The flat
passband response of this simulated filter for the case of a = 0.1,0.5 and 0.9 is shown in
Figure 3.7(a) as dashed lines where the slope can be observed to change with a .
3.2.3.1 Printed Circuit Board Realization
To further verify the simulations of the FLPF, a printed circuit board (PCB) of the circuit
of Fig. 3.5 was developed. Both the layout and photo of the populated board are shown in
Fig. 3.6. The components used to implement filters of order 1.1, 1.5, and 1.9 consisted of

30
(1+a) k2k3
Resistor (W) (1+0.1)0.350.74 (1+0.5)0.69
0.86 (1+0.9)1.360.97
Ra 38300 6190 102Rb 1000 1000 1000Rc 13700 24900 4990R1 60400 6810 4320R2 76.8 105 249R3 1270 7870 •R4 1620 1740 825R5 • 866 32.4R6 3240 2210 1430R7 931 960 1060
Table 3.4: Standard E96 resistor values to realize approximated FLPF of order(n+a) = 1.1, 1.5, and 1.9.
1% tolerance resistors, 20% tolerance capacitors, and MC1458 op amps. The magnitude
response of these circuits measured using a HP4395A Network analyzer are also shown
in Fig. 3.7(a), but as solid lines. The experimental results show close agreement with the
simulations confirming the operation of the approximated FLPF. The step response of the
1.9 order filter was also investigated to examine its stability, and is shown in Fig. 3.7(b). We
can clearly see from the magnitude response of both the measured and simulated responses
that this filter does realize a fractional step through the stopband without the undesirable
peaking of previous fractional step filters. This verifies the simulations proving that the
integer order filters can accurately approximate the incremental stepping of FLPFs. Also,
as in the simulation results, the measured stopbands are not as linear as the magnitude
response of the simulated transfer function; which is a result of the deviation from the ideal
Laplacian operator associated with using the 2nd order approximation of (3.1). Comparing
the results, we find that the passband attenuations of the experimental and simulated filters
are very close to their theoretical values of �20(1+a)dB/decade. For comparison, these
attenuations are listed in Table 3.5.

31
(a)
(b)
Figure 3.6: (a) Printed circuit board layout and (b) populated board to realizeapproximated FLPF of Fig. 3.5.
3.3 Field Programmable Analog Array Implementation
A Field Programmable Analog Array (FPAA) is an “analog signal processor” specifically
designed for signal conditioning, filtering, gain, rectification, summing, subtracting, and

32
-60
-50
-40
-30
-20
-10
0
10
103
104
105
Magnit
ude (
dB
)
Frequency (rad/s)
(a)
(b)
Figure 3.7: (a) Measured and PSPICE simulation results of the magnitude response of theapproximated (1+a) order FLPF, shown as solid and dashed lines, respectively. (b) Step
response of approximated 1.9 order FLPF.

33
Order Theoretical Simulated Experimental(1+a) (dB/dec) (dB/dec) (dB/dec)
1.1 �22 �22.48 �22.931.5 �30 �29.20 �29.741.9 �38 �36.50 �36.44
Table 3.5: Theoretical, simulated, and experimental stopband attenuations ofapproximated (1+a) order FLPF.
multiplying of signals [36]. The FPAAs from Anadigm consist of fully Configurable Ana-
log Modules (CAMs) surrounded by programmable interconnect and analog input/output
cells. The signal processing occurs in the CAMs using fully differential switched capacitor
circuitry, which provide specialized behaviours such as filtering, gain, sample and hold,
summing, rectification and more. This provides a very flexible architecture that can be
easily reconfigured using the AnadigmDesigner tools. These tools are a graphical design
environment to build circuits using the design CAMs. In this design environment CAMs
can be dropped in, wired together, and configured for the desired design requirements.
From the graphical implementation of a circuit, the AnadigmDesigner tools generate the
configuration data file to program the FPAA. Two CAMs that are particularly useful in
the implementation of approximated fractional step filters are the bilinear and biquadratic
CAMs. Both these modules allow the lowpass and highpass fractional step filters to be
easily implemented.
3.3.1 FPAA Realization of a (1+a) Fractional Low Pass Filter
Previously, to implement an approximated FLPF required the determination of the set of
component values to realize the decomposed transfer functions. Using the biquadratic and
blinear filter CAMs from the AnadigmDesigner tools instead, requires only the transfer
function pole and zero frequencies and quality factors to be realized [37]. For the FPAA
implementation of a first order FLPF, the transfer function of (3.5) must be arranged to

34
match the CAMs, taking the form
T (s) = T1(s) ·T2(s) (3.15)
T1(s) =2p f1G1
s+2p f1
T2(s) = �G2s2 +
2p f2zQ2z
s+4p2 f 22z
s2 +2p f2pQ2p
s+4p2 f 22p
where T1(s) and T2(s) are the transfer functions of the bilinear and biquadratic filter CAMs,
respectively. Here G1,2 are the gains of T1(s) and T2(s) respectively, f1 the pole frequency
of T1(s), f2p,z the pole and zero frequencies of T2(s), and Q2p,z the pole and zero quality
factors of T 2(s). T1(s) and T2(s) are realized on the FPAA using the switched capacitor
circuits in Fig. 3.8 [38, 39]. Before equating the biquadratic and bilinear transfer functions
of (3.5) to (3.15) the frequency transformation of s = swo
= s2p fo must be applied to (3.5),
where fo is the denormalized frequency yielding,
Hdenorm(s) = Hdenorm1(s) ·Hdenorm2(s) (3.16)
Hdenorm1(s) =2p fo
s+2pd0 fo
Hdenorm2(s) =e0
hs2 + 2p f0e1
e0s+ 4p2 f 2
o e2e0
i
s2 +2p f0d1s+4p2 f 2o d2
Comparing the equations of (3.15) and (3.16) the design equations to implement an ap-
proximated FLPF of order (1+a) are
f1 = d0 fo (3.17)
f2z = fo
re2
e0(3.18)
Q2z =
pe0e2
e1(3.19)

35
(a)
(b)
Figure 3.8: Internal switched capacitor circuits on the FPAA to realize the (a) low passbilinear and (b) pole/zero biquadratic transfer functions.
f2p = fop
d2 (3.20)
Q2p =
pd2
d1(3.21)
G1 =e0
d0(3.22)

36
Figure 3.9: First order approximated FLPF implementation using the bilinear andbiquadratic filter CAMs of the AnadigmDesigner tools for implementation on the
AN231E04 FPAA.
3.3.1.1 First Order Approximated Fractional Low Pass Filter
To implement a first order FLPF using a second order approximation requires the use of
both the bilinear and biquadratic filter CAMs. These two CAMs are cascaded and wired
together to the desired input and output ports in the AnadigmDesigner design environment
as shown in Fig. 3.9. The bilinear filter is setup in the low-pass configuration, shown in Fig.
3.10(a), and the biquadratic filter is setup in the pole-zero configuration, as shown in Fig.
3.10(b). Using these setup environments in the AnadigmDesigner tools gives control over
filter type, sampling phase, polarity, resource usage, and design parameters. With the de-
sign parameters giving full control over the corner frequencies, quality factors, and low and
high frequency gains. These tools allow for the design using high level parameters without
the need to calculate the underlying capacitor values to realize the filter with the switched
capacitor circuit. For these approximated FLPFs, the theoretical design values using (3.17)
to (3.22) when f0 = 1kHz and the physical values realized using the CAMs are given in
Table 3.6 for filters of order (1+a) = 1.1, 1.5, and 1.9. Note that the realized values vary

37
(a)
(b)
Figure 3.10: Parameter setup environment of the AnadigmDesigner tools for the (a)bilinear and (b) biquadratic filter CAMs.

38
Order (1+a)1.1 1.5 1.9
Design Value Theoretical Realized Theoretical Realized Theoretical Realizedf1(kHz) 0.305 0.309 0.455 0.456 0.697 0.699f2p(kHz) 1.81 1.81 1.48 1.47 1.20 1.21f2z(kHz) 1.16 1.17 2.24 2.23 7.08 7.15
Q2p 0.447 0.445 0.618 0.619 0.653 0.637Q2z 0.249 0.249 0.224 0.225 0.122 0.122G1 2.42 2.40 0.443 0.429 1.00 1.00A 1.00 1.00 1.00 1.00 0.0173 0.0287
Table 3.6: Theoretical and realized CAM values for physical implementation of theapproximated first order FLPFs.
from the theoretical values due to the limitations on the values that can be implemented
by the FPAA. The biquadratic and bilinear filter CAMs cannot realize all possible values
because of hardware limits as a result of the design parameters being interrelated to other
parameters as well as the sample clock frequency. The corner frequencies of both poles
and zeroes are linearly related to the sample clock frequency, Fc, with the absolute upper
and lower values limited to Fc/10 and Fc/500, respectively. Also, the corner frequencies,
quality factors, and gains are all interrelated based on the capacitors of the switched capac-
itor circuits of Fig. 3.8. Since there are a finite number of capacitor values implemented
on silicon, the AnadigmDesigner tools selects the capacitor values with the best ratios to
satisfy the design parameters entered. However, these best ratios do not always meet the
exact parameters which results in the variation between the theoretical and realized values
in Table 3.6.
3.3.1.2 Higher Order Approximated Fractional Low Pass Filter
To realize a higher order approximated fractional low pass filter of order (n+a) on the
FPAA requires the cascading of further combinations of bilinear and biquadratic filter
CAMs with those implemented for the 1st order realization. With these additional CAMs
designed to implement a Butterworth filter of order (n�1) frequency shifted to fo. Using

39
Figure 3.11: Fourth order approximated FLPF implementation using the bilinear andbiquadratic filter CAMs of the AnadigmDesigner2 tools for implementation on the
AN231E04 FPAA.
this method a FLPF of order (4+a) is implemented by introducing another bilinear and
biquadratic filter CAM to Fig. 3.9, resulting in the configuration shown in Fig. 3.11. This
creates a 6th order filter, a result of 2 biquadratic and 2 bilinear CAMs cascaded together,
to approximate the 4th order FLPF using the 2nd order approximation of sa .
3.3.2 FPAA Realization of a Fractional High Pass Filter
The fractional high pass filters can be realized using (3.17) to (3.21), the same equations
used for the pole and zero frequencies and quality factors in the design of the FLPFs.
However, the values of d0,1,2 and e0,1,2 are different than the low pass values and can be
calculated as

40
(1+a) k2k3
d0 d1 d2 e0 e1 e2
(1+0.1)0.3550.737 0.3410 4.1726 2.9332 1.0000 3.4545 0.7403
(1+0.5)0.6810.863 2.1988 1.0918 0.4552 1.0000 2.0000 0.2000
(1+0.9)1.3520.973 1.4352 1.2768 0.6968 1.0000 1.1579 0.0200
Table 3.7: d0,1,2 and e0,1,2 values for decomposed 1st and 2nd order transfer functions torealize an approximated FHPF of orders 1.1, 1.5, and 1.9.
d0 = Roo f O f [(a2k2 +a0k3)x3 � (a1k2 +a1k3 +a2)x2 (3.23)
+(a0k2 +a2k3 +a1)x+a0
d1 =a0k2 +a2k3 +a1
a0�d1 (3.24)
d2 =a1k2 +a1k3 +a2
a0�d0d1 (3.25)
e0 = k1 (3.26)
e1 = k1a1
a0(3.27)
e2 = k1a2
a0(3.28)
where x is once again a dummy variable and d0 is the positive real root of (3.23). Using
(3.23) to (3.28) the values of d0,1,2 and e0,1,2 for filters of order (1+a) = 1.1, 1.5, and 1.9
with values of k2,3 for minimum passband error from Fig. 3.2, presented in Table 3.7.
3.3.2.1 First Order Approximated Fractional High Pass Filter
The process of implementing a first order FHPF on the AN231E04 FPAA is very similar
to that of the FLPF, and requires the use of both the bilinear and biquadratic filter CAMs.
However, whereas for the FLPF the bilinear filter was setup in the low-pass configuration,
for the FHPF it is setup in the high-pass configuration. Note the biquadratic filter remains
in the pole-zero configuration. These two CAMs cascaded in these design configurations
are shown in Fig. 3.12. For these approximated FHPFs, the theoretical design values using

41
Figure 3.12: First order approximated FHPF implementation using the bilinear andbiquadratic filter CAMs of the AnadigmDesigner2 tools for implementation on the
AN231E04 FPAA.
Order (1+a)1.1 1.5 1.9
Design Value Theoretical Realized Theoretical Realized Theoretical Realizedf1(kHz) 34.1 32.8 21.99 21.9 14.4 14.4f2p(kHz) 5.52 5.22 6.75 6.76 8.35 8.35f2z(kHz) 8.60 8.66 4.47 4.27 1.41 1.42
Q2p 0.447 0.448 0.618 0.632 0.654 0.657Q2z 0.249 0.247 0.224 0.228 0.122 0.123
Table 3.8: Theoretical and realized CAM values for physical implementation of theapproximated first order FHPFs.
(3.17) to (3.22) when f0 = 10kHz and the physical values realized using the CAMs are
given in Table 3.8. Again, the realized values vary from the theoretical values due to the
limitations on the values that can be implemented by the FPAA. Note, when designing the
FHPFs the high frequency gain of the biquadratic block needs to be set to e0 to maintain
the correct passband response.

42
Figure 3.13: Fourth order approximated FHPF implementation using the bilinear andbiquadratic filter CAMs of the AnadigmDesigner2 tools for implementation on the
AN231E04 FPAA.
3.3.2.2 Higher Order Approximated Fractional High Pass Filter
Again, the process to realize a higher order approximated fractional high pass filter of order
(n+a) on the FPAA is very similar to that for higher order FLPFs. Requiring the cascad-
ing of further combinations of bilinear and biquadratic filter CAMs with those already
implemented for the 1st order realization. With these new CAMs designed to implement
a highpass Butterworth filter of order (n� 1), with frequency shifted to fo. Using this
method to create an approximated FHPF of order (4+a) another bilinear and biquadratic
filter CAM were introduced to those in Fig. 3.12 and shown in Fig. 3.13.
3.3.3 Simulation and Experimental Results
All of the fractional step filters, both low and high pass, were realized on an AN231E04
FPAA development kit from Anadigm as shown in Fig. 3.14(a). The magnitude response
of all the fractional step filters implemented on the FPAA were measured using a
HP4395A Network/Spectrum analyzer with the test setup as shown in Fig. 3.14(b). The
AN231 FPAA requires differential, level shifted input signals for processing. Therefore, to
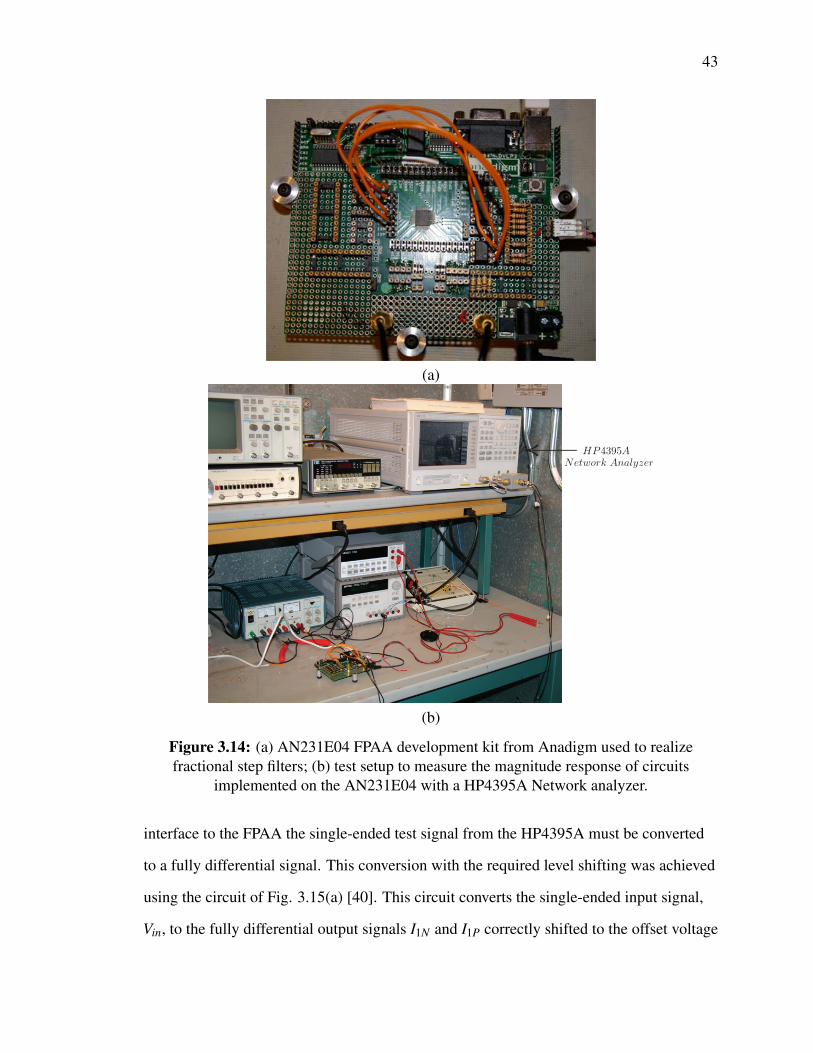
43
(a)
(b)
Figure 3.14: (a) AN231E04 FPAA development kit from Anadigm used to realizefractional step filters; (b) test setup to measure the magnitude response of circuits
implemented on the AN231E04 with a HP4395A Network analyzer.
interface to the FPAA the single-ended test signal from the HP4395A must be converted
to a fully differential signal. This conversion with the required level shifting was achieved
using the circuit of Fig. 3.15(a) [40]. This circuit converts the single-ended input signal,
Vin, to the fully differential output signals I1N and I1P correctly shifted to the offset voltage

44
V MRC with a gain of R f /Ri, described by the equations below
I1N = VinR f
Ri+V MRC (3.29)
I1P = �✓
VinR f
Ri+V MRC
◆(3.30)
Note that V MRC was generated internally by the FPAA and had a value of +1.5V in our
test setup. After the signal processing on the FPAA, the signals are output as differential
signals. To interface these signals with the HP4395A requires a conversion from the
differential to single-ended signals, achieved using the circuit of Fig. 3.15(b) [40]. This
circuit converts the differential input signals O1N and O1P to the single-ended output
signal Vo with a gain of R f /Ri described by the equation below
Vo =R f
Ri(O1P �O1N) (3.31)
Both the single-to-differential and differential-to-single circuits were realized using
TLE2072 op amps from Texas Instruments [41]. The components were selected to
maintain a gain of 1, with 5% tolerance resistors of 5.1kW and 100kW used to build the
single-to-differential and differential-to-single circuits, respectively. The block diagram
illustrating this test setup is shown in Fig. 3.16.
3.3.3.1 Experimental Low Pass Fractional Step Filters
The experimental results of the magnitude and phase responses of the approximated first
order FLPFs with fractional steps of 0.1, 0.5, and 0.9 are shown in Fig. 3.17 as dashed
lines along with the MATLAB simulation results of the theoretical transfer functions pre-
sented as solid lines. The experimental results show close agreement with the simulations
confirming the operation of the approximated FLPFs on the FPAA. This further verifies the
results of previous realizations of the approximated fractional step filter, supporting that
integer order filters can accurately approximate the incremental stepping of a FLPF. Com-

45
+
-
+
-
(a)
+
-
(b)
Figure 3.15: Circuits to realize the (a) level-shifting, single-to-differential and (b)differential-to-single signal conversions to interface the AN231 FPAA with the HP4395A
network analyzer.
paring the results, we find that the passband attenuation of the experimental and simulated
filters are very close to their theoretical values of �20(1+a)dB/decade. For compari-
son, these attenuations are listed in Table 3.9. The experimental results of the magnitude
and phase responses of the approximated fourth order FLPFs with fractional steps of 0.1,

46
Level-Shifting
Single-to-Differential
Converter
AN231E04 FPAA
Development Board
Differential-to-Single
Converter
HP4395A Network Analyzer
Figure 3.16: Block diagram of test setup with conversion circuits required to interface theAN231 FPAA and the HP4395A network analyzer.
Order Theoretical Simulated Experimental(1+a) (dB/dec) (dB/dec) (dB/dec)
1.1 �22 �21.34 �21.331.5 �30 �30.75 �30.611.9 �38 �38.81 �39.00
Table 3.9: Theoretical, simulated, and experimental stopband attenuations ofapproximated (1+a) order FLPF realized using FPAA.
0.5, and 0.9 are given in Fig. 3.18 as dashed lines along with the MATLAB simulation
results of the theoretical transfer functions presented as solid lines. The experimental re-
sults once again show close agreement with the simulations confirming that the method
of implementing a higher order FLPF by dividing the first order FLPF by a higher or-
der Butterworth polynomial is valid. It also validates that this method of implementing a
higher order filter maintains the fractional step through the stopband without the passband
peaking of previous fractional filters. Comparing the results, we find that the passband at-
tenuation of the experimental and simulated filters are very close to their theoretical values
of �20(4+a)dB/decade. For comparison, these attenuations are listed in Table 3.9. The
complete set of experimental and simulation results for fractional low pass filters are pre-
sented in Appendix A for the cases (n+a) when n = 1 to 4 in fractional steps of a = 0.1,
0.5, and 0.9.
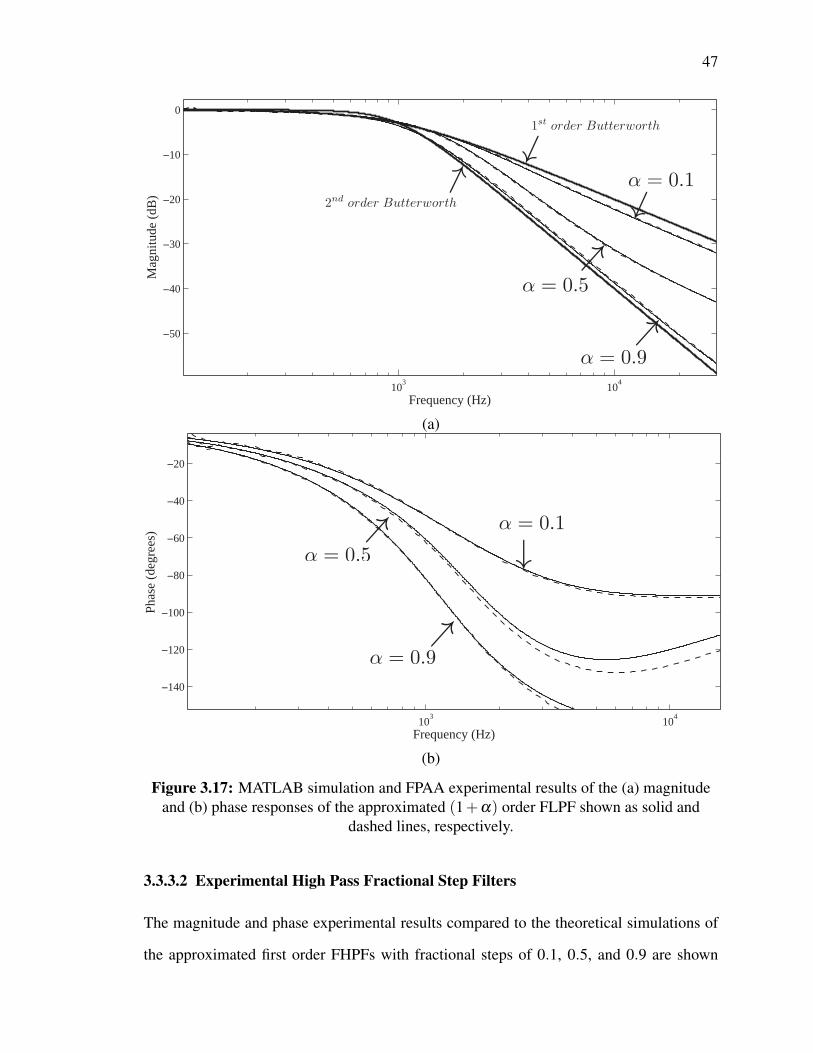
47
103
104
−50
−40
−30
−20
−10
0
Frequency (Hz)
Mag
nit
ud
e (d
B)
(a)
103
104
−140
−120
−100
−80
−60
−40
−20
Frequency (Hz)
Phas
e (d
egre
es)
(b)
Figure 3.17: MATLAB simulation and FPAA experimental results of the (a) magnitudeand (b) phase responses of the approximated (1+a) order FLPF shown as solid and
dashed lines, respectively.
3.3.3.2 Experimental High Pass Fractional Step Filters
The magnitude and phase experimental results compared to the theoretical simulations of
the approximated first order FHPFs with fractional steps of 0.1, 0.5, and 0.9 are shown

48
103
−70
−60
−50
−40
−30
−20
−10
0
Frequency (Hz)
Mag
nit
ud
e (d
B)
(a)
102
103
−400
−350
−300
−250
−200
−150
−100
−50
Frequency (Hz)
Phase (
degre
es)
(b)
Figure 3.18: MATLAB simulation and FPAA experimental results of the (a) magnitudeand (b) phase responses of the approximated (4+a) order FLPF shown as solid and
dashed lines, respectively.
in Fig. 3.19 as dashed and solid lines, respectively. The experimental results show close
agreement with the simulations confirming that the use of the highpass to lowpass trans-
formation on the proposed transfer function (3.2) does realize a highpass filter without

49
Order Theoretical Simulated Experimental(4+a) (dB/dec) (dB/dec) (dB/dec)
4.1 �82 �81.39 �80.804.5 �90 �90.76 �90.404.9 �98 �98.3 �96.80
Table 3.10: Theoretical, simulated, and experimental stopband attenuations ofapproximated (4+a) order FLPF realized using FPAA.
Order Theoretical Simulated Experimental(1+a) (dB/dec) (dB/dec) (dB/dec)
1.1 �22 �21.43 �21.201.5 �30 �29.49 �29.801.9 �38 �37.09 �37.58
Table 3.11: Theoretical, simulated, and experimental stopband attenuations ofapproximated (1+a) order FHPF realized using FPAA.
passband peaking while maintaining the fractional step through the stopband. It also vali-
dates that the values of k2,3 for minimum passband error from the lowpass case also yield
a flat passband after the LP-to-HP transformation. Comparing the results, we find that
the passband attenuation of the experimental and simulated filters are very close to their
theoretical values of �20(1+a)dB/decade. These attenuations are listed in Table 3.11.
The experimental results of the magnitude and phase responses of the approximated
fourth order FHPFs with fractional steps of 0.1, 0.5, and 0.9 are shown in Fig. 3.20, as
dashed lines, with the MATLAB simulation results of the theoretical transfer functions
presented as solid lines. The experimental results show close agreement with the simu-
lations confirming that the method of implementing a higher order FHPF by dividing the
first order FHPF by a higher order Butterworth polynomial after the lowpass to highpass
transformation is successful. Also, that this method of implementing a higher order filter
maintains the fractional step through the stopband without the passband peaking of previ-
ous fractional filters. The passband attenuation of the experimental and simulated filters
are very close to their theoretical values of �20(4+a)dB/decade, listed in Table 3.12.

50
103
104
105
−60
−50
−40
−30
−20
−10
0
Frequency (Hz)
Mag
nit
ud
e (d
B)
(a)
103
104
−350
−300
−250
−200
Frequency (Hz)
Phas
e (d
egre
es)
(b)
Figure 3.19: MATLAB simulation and FPAA experimental results of the (a) magnitudeand (b) phase responses of the approximated (1+a) order FHPFs shown as solid and
dashed lines, respectively.
3.3.4 Application of a Fractional Step Filter
To highlight the precise filtering achieved by a fractional step filter, two tones added using
the circuit in Fig. 3.21 are applied to approximated highpass filters of orders (4+a) =

51
104
−70
−60
−50
−40
−30
−20
−10
0
Frequency (Hz)
Mag
nit
ud
e (d
B)
(a)
104−300−250−200−150−100−50
050
(b)
Figure 3.20: MATLAB simulation and FPAA experimental results of the (a) magnitudeand (b) phase responses of the approximated (4+a) order FHPFs shown as solid and
dashed lines, respectively.
4.1 to 4.9 in steps of 0.2 with the output of the filter measured by a HP4395A Spectrum
analyzer to determine the output signal power. The output of this topology is proportional

52
Order Theoretical Simulated Experimental(4+a) (dB/dec) (dB/dec) (dB/dec)
4.1 �82 �81.43 �80.44.5 �90 �89.1 �89.64.9 �98 �98.74 �99.2
Table 3.12: Theoretical, simulated, and experimental stopband attenuations ofapproximated (4+a) order FHPF realized using FPAA.
+
-
Figure 3.21: Op amp topology with output voltage proportional to the sum of the inputvoltages .
to the sum of the input voltages, described as
Vo =�✓
R3
R1V1 +
R3
R2V2
◆(3.32)
Which if R1 = R2 = R3 reduces to
Vo =�(V1 +V2) (3.33)
This circuit was realized using MC1458 op amps and 1% tolerance, 1kW resistors. Tones
at 3kHz and 10kHz with peak-to-peak voltages of 500mV are applied to the approximated
FHPFs shifted to a frequency of fo = 10kHz. The peak value of the tones for each filter
are presented in Table 3.13. Note that the use of the approximated fractional Laplacian
operator results in the deviation of the linear spacing between the powers of the tone at 3kHz

53
Order (n+a) Power @ 3kHz (dBm) Power @ 10kHz (dBm)
4.1 �32.7 3.944.3 �35.9 3.374.5 �38.2 3.54.7 �38.4 5.014.9 �40.7 4.45
Table 3.13: Signal power of tones at 3kHz and 10kHz after application to approximatedFHPFs of orders (4+a) = 4.1 to 4.9 in steps of 0.2
as a increases. This control of the attenuation is not possible using integer order filters.
Highpass Butterworth filters, frequency shifted to fo = 10kHz, would result in signals of
�32.5dBm and �43.4dBm for a 3kHz tone using 4th and 5th order filters, respectively. This
precise control is also shown in the frequency spectrum of Fig. 3.22. The spectrum of the
4th and 5th order highpass Butterworth filters, as dotted and solid lines respectively, are
compared to that of a 4.5 order FHPF, shown as a dashed line. All of the filters maintain
the tone at 10kHz with the attenuation of the 4.5 order filter at 3kHz clearly between those
of the standard Butterworth filters. These results reinforce the experimental results of the
magnitude response in Fig. 3.20; showing that these filters can be used to precisely control
attenuation characteristics.
3.4 Summary
In this chapter we have presented the design process and equations to realize fractional step
filters with an operational amplifier implementation and FPAA hardware. Simulated and
physically realized integer order filters demonstrate the fractional step through the stopband
for both highpass and lowpass filters of orders (1+a) and (4+a) in steps of 0.1, 0.5, and
0.9. In all cases the close agreement between the simulated and experimental results can
be observed. These results serve to verify that the lowpass to highpass transformation does
yield a highpass fractional step filter without peaking in the passband and that the selection
of k2,3 for minimum passband error also applies to the FHPFs. It also demonstrates that
the method for implementing higher order fractional step filters is suitable for both low and

54
Figure 3.22: Frequency spectrum of approximated 4.5 order FHPF (dashed) compared to4th (dotted) and 5th (solid) order highpass Butterworth filters.
high pass filters.

CHAPTER 4
EQUAL RIPPLE FRACTIONAL LAPLACIAN APPROXIMATION
In Chapter 1 applications of the fractional Laplacian operator in numerous areas of en-
gineering were presented. These concepts in circuit theory have applications in power
electronics [12], integrator [13, 14] and differentiator circuits [15], oscillators [16], multi-
vibrator circuits [17], and filter theory [18–21]. However, because there are no commercial
fractance devices available, integer order approximations of sa must be used to implement
systems that take advantage of fractional behaviour. There exist many methods to create
approximations of sa with varying order and accuracy; the accuracy and approximated fre-
quency band increasing as the order increases. In this chapter we present a method for
modifying a second order approximation of the fractional Laplacian operator that yields
an equal ripple approximation that has both lower peak and lower cumulative error when
compared to the original.
Previous work on the approximation of the general fractional Laplacian operator yielded
(3.1), a second order approximation using a CFE method [32] as
sa ⇡ (a2 +3a +2)s2 +(8�2a2)s+(a2 �3a +2)(a2 �3a +2)s2 +(8�2a2)s+(a2 +3a +2)
(4.1)
Repeated here as equation (4.1). Fig. 4.1 outlines the magnitude and phase of (4.1) com-
pared with sa when a = 0.7. From this figure, the magnitude error of the approximation
compared to the ideal case does not exceed 1.482dB for w e [0.0295,33.91]rad/s, while
the phase error does not exceed 3.155� for w e [0.1384,7.227]rad/s. We note also both the

56
10−2
10−1
100
101
102−40
−20
020
40
Frequency (rad/s)
Mag
nit
ud
e (
dB
)
10−2
10−1
100
101
1020
20
40
60
Frequency (rad/s)
Phase (
deg
rees)
Figure 4.1: Magnitude and phase of ideal (solid) and 2nd order approximation (dashed)of sa when a = 0.7.
magnitude and phase responses have inner and outer ripples, highlighted in Fig. 4.1.
To compare the peaks of the inner and outer ripples for both the magnitude and phase,
let us define an error, E, which is the difference between the ideal sa and (4.1) as
E = sa � (a2 +3a +2)s2 +(8�2a2)s+(a2 �3a +2)(a2 �3a +2)s2 +(8�2a2)s+(a2 +3a +2)
(4.2)
Using (4.2) the peaks of the magnitude and phase ripple errors can be calculated numeri-
cally, as shown in Fig. 4.2, for a where 0 < a < 1. From Fig. 4.2 it can be seen that both
the inner and outer ripple errors vary significantly with a . Noting that the size of the outer
ripple is always larger than the inner ripple for all values of a and that the maximum error
for magnitude and phase occur at different values of a. The magnitude error reaching a
maximum of 1.496dB when a = 0.65 with an inner ripple of 0.243dB, and the phase error
reaching a maximum of 3.211� when a = 0.54 with an inner ripple of 1.404�.
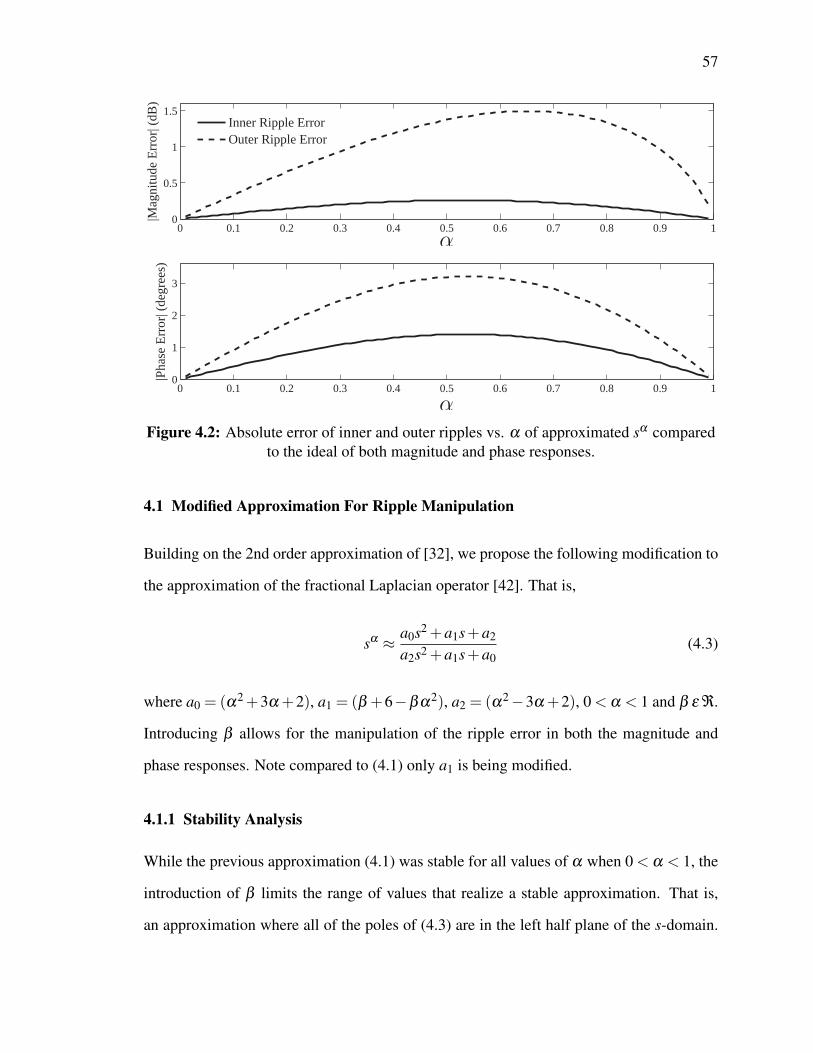
57
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
1
2
3
|Ph
ase
Err
or|
(d
egre
es)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.5
1
1.5
|Mag
nit
ud
e E
rro
r| (
dB
)
Inner Ripple Error
Outer Ripple Error
Figure 4.2: Absolute error of inner and outer ripples vs. a of approximated sa comparedto the ideal of both magnitude and phase responses.
4.1 Modified Approximation For Ripple Manipulation
Building on the 2nd order approximation of [32], we propose the following modification to
the approximation of the fractional Laplacian operator [42]. That is,
sa ⇡ a0s2 +a1s+a2
a2s2 +a1s+a0(4.3)
where a0 = (a2+3a +2), a1 = (b +6�ba2), a2 = (a2�3a +2), 0 < a < 1 and b e ¬.
Introducing b allows for the manipulation of the ripple error in both the magnitude and
phase responses. Note compared to (4.1) only a1 is being modified.
4.1.1 Stability Analysis
While the previous approximation (4.1) was stable for all values of a when 0 < a < 1, the
introduction of b limits the range of values that realize a stable approximation. That is,
an approximation where all of the poles of (4.3) are in the left half plane of the s-domain.

58
These poles, s1,2 are calculated as
s1,2 =�a1 ±
qa2
1 �4a0a2
2a0(4.4)
Hence, to maintain the poles in the left half plane requires that s1,2 < 0, which is always
true if the following conditions are met
a1 > 0 (4.5)
�a1 +p(a�4aoa2 < 0 (4.6)
Substituting the values of a0,1,2 into (4.6) yields
4a4 �20a2 +16 > 0 (4.7)
Which is true over the regions a = (�•,2)[ (�1,1)[ (2,•). Therefore, the condition of
(4.6) is always met because a is defined as 0 < a < 1 which falls entirely within a region
where the inequality is always evaluated true. Substituting the value of a1 into (4.5) and
solving for b yields
b >�6
1�a2 (4.8)
Therefore to maintain stability, the value of b to manipulate the error ripple must be greater
than the value of (4.8) for the select value of a . Note that the value of b required for
stability decreases as a increases. The boundary between stable and unstable b values
from (4.8) for 0 < a < 1 is shown in Fig. 4.3. In the following sections we examine
how this modification can be used to manipulate the error of the response and evaluate the
cumulative error.

59
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
−300
−250
−200
−150
−100
−50
Figure 4.3: Minimum b required for stability of (4.3) for 0 < a < 1.
4.1.2 Error Ripple Manipulation
Using (4.3) the size of both the inner and outer error ripples in both the magnitude and phase
responses can be changed by modifying the value of b . Increasing b decreases the size of
the outer ripple error while increasing the inner ripple error in both the magnitude and phase
responses. Looking at the case when b = 2 in Fig. 4.4, when the modified approximation
(4.3) is equal to the original approximation (4.1), we see that the outer ripple error of the
magnitude response is 1.481dB with an inner ripple error of 0.225dB; while error ripples of
the phase response are 2.818� and 1.217� for the outer and inner error ripples, respectively.
Note that increasing b to 3 and 4 increases the inner ripple of the magnitude response to
0.5428dB and 0.8812dB, respectively; with the outer ripples decreasing to 1.027dB and
0.6054dB, respectively. The same behaviour is mirrored in the phase response, with inner
ripple values of 4.697� and 7.836� and outer ripple values of 1.458� and 0.4265� for b = 3
and b = 4, respectively.
4.1.3 Equi-Ripple Approximation
With the ability to increase the size of the inner ripple while decreasing that of the outer
ripple, there exists a value of b that will yield an equi-ripple error response of either the

60
10−2
10−1
100
101
0
0.5
1
1.5
Frequency (rad/s)
|Mag
nit
ud
e E
rro
r| (
dB
)
10−1
100
101
0
2
4
6
8
Frequency (rad/s)
|Ph
ase
Err
or|
(D
egre
es)
Figure 4.4: Magnitude and phase absolute inner and outer ripple error of (4.3) comparedto the ideal sa for b values from 2 to 4 when a = 0.7.
phase or magnitude for a given a . That is, a response where both the inner and outer
ripple errors are the same size. These values of b that yield this equi-ripple response,
for both magnitude and phase, using (4.3) were solved for numerically and are shown in
Fig. 4.5 for 0 < a < 1. Note that the values of b that create an equi-ripple response are
all positive and are therefore in the stable region. As a result, these values will result in
an approximation that is always stable. Also, from this data there is no intersection of
the values for magnitude and phase, so that it is never possible to have an approximation
with equi-ripple response in both magnitude and phase simultaneously. This equi-ripple
response for both magnitude and phase when a = 0.2 and a = 0.8 using b = 3.2907 and
b = 3.8382, respectively, for the magnitude response and b = 2.3626 and b = 2.3028,
respectively, for the phase response is shown in Fig. 4.6. Comparing the max ripple errors
from Fig. 4.6 for a = 0.2 and 0.8 to the values in Fig. 4.2 show a reduction in the max error
for both the magnitude and phase responses. For the case when a = 0.8, the max ripple
errors are 1.337dB and 2.173� for the magnitude and phase, respectively. Using the equi-
ripple b values in (4.3), those are b = 3.8382 and b = 2.3028 for magnitude and phase,

61
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 12
3
4
5
6
7
8
MagnitudePhase
Figure 4.5: b values required for equi-ripple magnitude (solid) and phase (dashed) errorapproximation for 0 < a < 1.
shows a reduction of the maximum error in both magnitude and phase when compared to
(4.1). Note the errors are reduced to 0.6542dB and 1.794� for the magnitude and phase
respectively, a reduction of 0.6828dB and 0.379�. This is also true when a = 0.2, using
the equi-ripple values, b = 3.2907 and b = 2.3626 for magnitude and phase, there is a
reduction of 0.2809dB and 0.266� in the maximum errors of the magnitude and phase,
respectively.
4.1.4 Cumulative Error
In order to quantify the error of both approximations to the ideal case, we use an objective
criteria [14] to compare them, defined as
CumulativeError =N
Âi=1
(Xi �Yi)2 (4.9)
where Xi is the approximation value of either phase or magnitude for a given frequency, Yi
is the ideal value for the same frequency value, and N is the number of samples for the com-
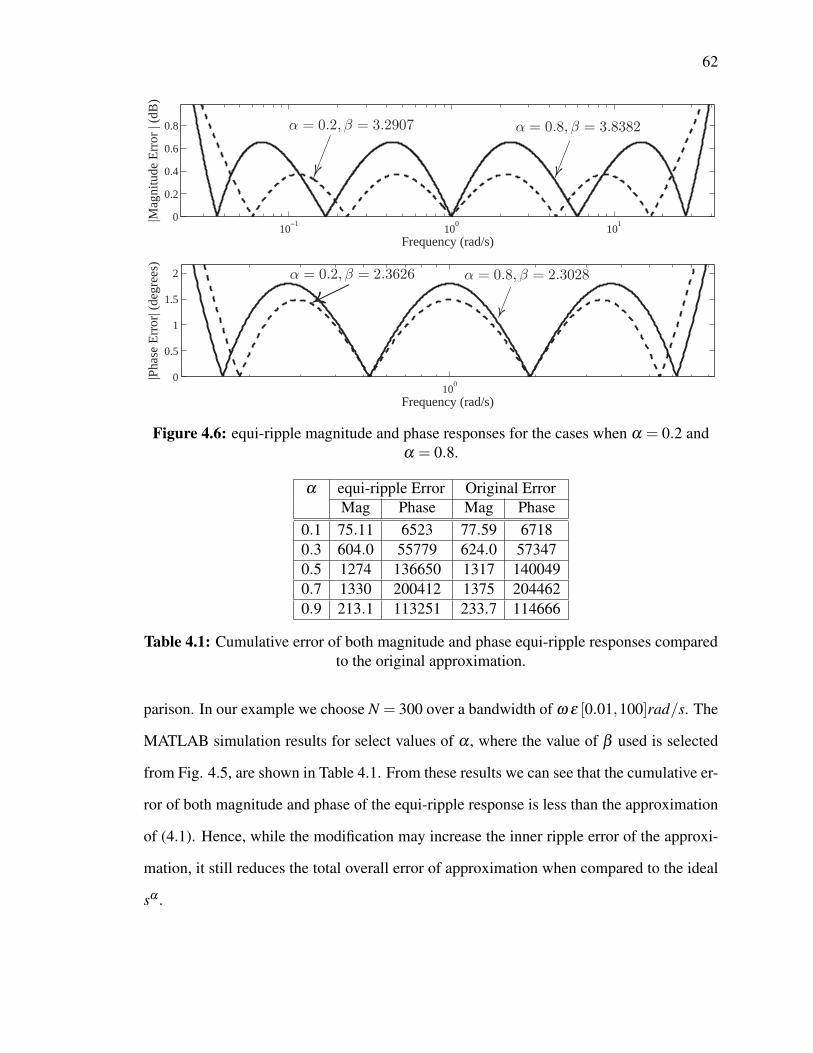
62
10−1
100
101
0
0.2
0.4
0.6
0.8
Frequency (rad/s)
|Mag
nit
ud
e E
rro
r | (
dB
)
100
0
0.5
1
1.5
2
Frequency (rad/s)
|Ph
ase
Err
or|
(d
egre
es)
Figure 4.6: equi-ripple magnitude and phase responses for the cases when a = 0.2 anda = 0.8.
a equi-ripple Error Original ErrorMag Phase Mag Phase
0.1 75.11 6523 77.59 67180.3 604.0 55779 624.0 573470.5 1274 136650 1317 1400490.7 1330 200412 1375 2044620.9 213.1 113251 233.7 114666
Table 4.1: Cumulative error of both magnitude and phase equi-ripple responses comparedto the original approximation.
parison. In our example we choose N = 300 over a bandwidth of w e [0.01,100]rad/s. The
MATLAB simulation results for select values of a , where the value of b used is selected
from Fig. 4.5, are shown in Table 4.1. From these results we can see that the cumulative er-
ror of both magnitude and phase of the equi-ripple response is less than the approximation
of (4.1). Hence, while the modification may increase the inner ripple error of the approxi-
mation, it still reduces the total overall error of approximation when compared to the ideal
sa .
63
4.2 Application to Fractional Filters
The current implementation of fractional-step filters requires the use of an approximation
of sa . Using (4.3) in the realization of these approximated fractional step filters is a better
choice than (4.1) as it has both lower cumulative and lower peak errors. In this section we
present the design of a fractional step filter using (4.3) and compare it to a fractional step
filter using (4.1) both compared against the ideal filter. To realize an approximated FLPF
using the modified approximation, (4.3) is substituted into the fractional transfer function
(3.2). Which for a first order fractional filter becomes:
HLP1+a(s)⇡
⇣a2a0
s2 + a1a0
s+1⌘
s3 + c0s2 + c1s+ c2(4.10)
where c0 = (a1 + a0k2 + a2k3)/a0, c1 = (a1(k2 + k3)+ a2)/a0, c2 = (a0k3 + a2k2)/a0, a
is the fractional step and k2,3 are values selected to maintain a passband similar to the
Butterworth response.
4.2.1 Simulation and Experimental Results
To verify the use of the proposed approximation in the realization of FLPFs, we compare
the measured magnitude response of 1.8 order FLPFs using (4.1) and (4.3) to the MAT-
LAB simulated ideal transfer function (2.3). These approximated FLPFs were shifted to
a frequency of 1kHz and realized on an AN231E04 FPAA configured as shown in Fig.
4.7. In this configuration the bilinear, biquadratic, and inverting gain CAMs are utilized.
The inverting gain CAM is added to introduce an external gain, G, because the biquadratic
and bilinear CAMs cannot alone realize the required gain for the system. The realized
design values using (3.17) to (3.22) are given in Table 4.2 for both filters. The magni-
tude responses of these filters were measured by a HP4395A Network analyzer and are
shown in Fig. 4.8(a) as dashed and dotted lines for the FLPFs approximated using (4.1)
and (4.3), respectively. Comparing these approximated FLPFs to the ideal, shown as a
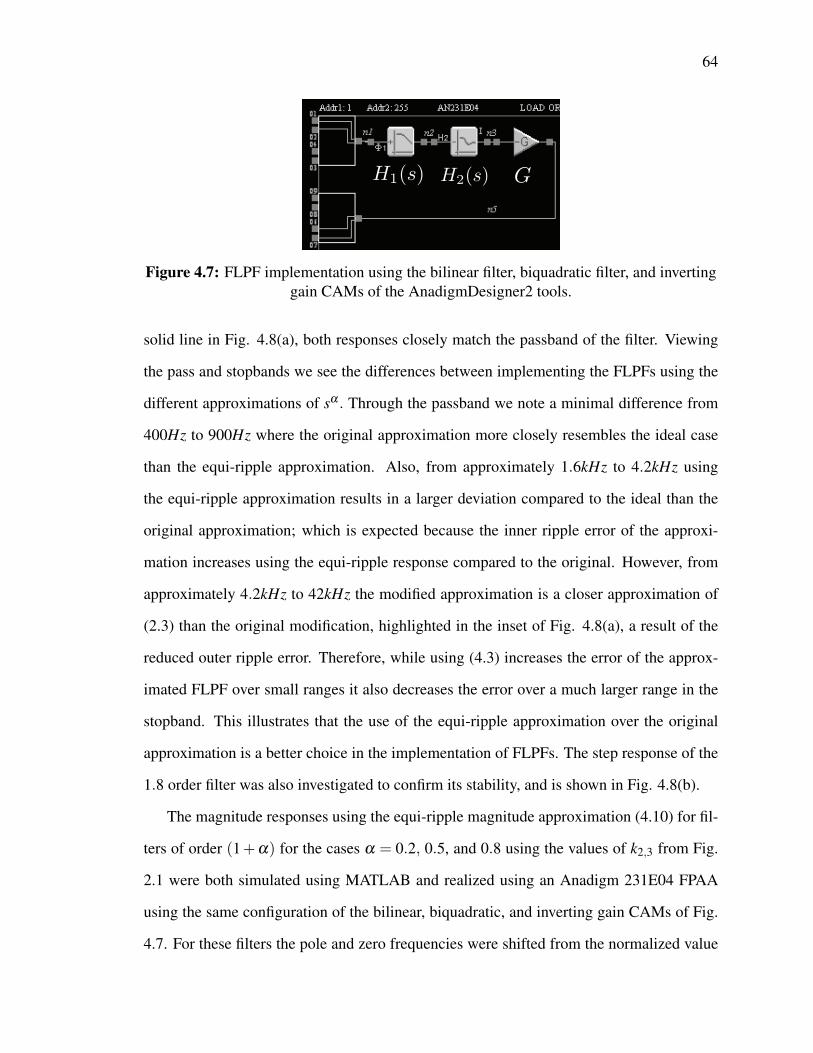
64
Figure 4.7: FLPF implementation using the bilinear filter, biquadratic filter, and invertinggain CAMs of the AnadigmDesigner2 tools.
solid line in Fig. 4.8(a), both responses closely match the passband of the filter. Viewing
the pass and stopbands we see the differences between implementing the FLPFs using the
different approximations of sa . Through the passband we note a minimal difference from
400Hz to 900Hz where the original approximation more closely resembles the ideal case
than the equi-ripple approximation. Also, from approximately 1.6kHz to 4.2kHz using
the equi-ripple approximation results in a larger deviation compared to the ideal than the
original approximation; which is expected because the inner ripple error of the approxi-
mation increases using the equi-ripple response compared to the original. However, from
approximately 4.2kHz to 42kHz the modified approximation is a closer approximation of
(2.3) than the original modification, highlighted in the inset of Fig. 4.8(a), a result of the
reduced outer ripple error. Therefore, while using (4.3) increases the error of the approx-
imated FLPF over small ranges it also decreases the error over a much larger range in the
stopband. This illustrates that the use of the equi-ripple approximation over the original
approximation is a better choice in the implementation of FLPFs. The step response of the
1.8 order filter was also investigated to confirm its stability, and is shown in Fig. 4.8(b).
The magnitude responses using the equi-ripple magnitude approximation (4.10) for fil-
ters of order (1+a) for the cases a = 0.2, 0.5, and 0.8 using the values of k2,3 from Fig.
2.1 were both simulated using MATLAB and realized using an Anadigm 231E04 FPAA
using the same configuration of the bilinear, biquadratic, and inverting gain CAMs of Fig.
4.7. For these filters the pole and zero frequencies were shifted from the normalized value

65
102
103
104
−50
−40
−30
−20
−10
0
Frequency (Hz)
Mag
nit
ud
e (d
B)
(a)
(b)
Figure 4.8: Ideal and approximated magnitude responses of (1+a) = 1.8 order FLPFsusing (4.1) and (4.3) as solid, dashed, and dotted lines, respectively. Note that for all
FLPFs k2 = 1.11 and k3 = 0.966 with b = 3.8382 in (4.3). (b) Step response ofapproximated 1.8 order FLPF using (4.3).

66
Order (1+0.8)Design Value Original Modified
f1(kHz) 0.611 0.504f2p(kHz) 1.30 1.42f2z(kHz) 4.61 4.60
Q2p 0.674 0.672Q2z 0.163 0.149G1,2 1 1G 0.0795 0.0963
Table 4.2: Realized CAM values for physical implementation of the 1.8 order FLPFsrealized using the original and equi-ripple approximation, (4.1) and (4.3), respectively.
Note b = 3.8382 for the equi-ripple magnitude approximation.
Order (1+a)k2k3
1.20.3080.852 1.50.594
0.912 1.81.1100.968
Design Value Theoretical Realized Theoretical Realized Theoretical Realizedf1(kHz) 0.3017 0.302 0.4004 0.400 0.5045 0.504f2p(kHz) 1.8388 1.82 1.6046 1.57 1.4225 1.42f2z(kHz) 1.354 1.35 2.2360 2.22 4.5826 4.60
Q2p 0.4667 0.467 0.6032 0.612 0.6722 0.672Q2z 0.2129 0.215 0.1958 0.197 0.1490 0.149G1,2 1 1 1 1 1 1G 1.8442 1.84 0.5149 0.515 0.0964 0.0963
Table 4.3: Realized CAM values for physical implementation of the approximated FLPFsusing equi-ripple magnitude approximation. Note b = 3.2907, 3.4199, and 3.8382 for
(1+a) = 1.2, 1.5, and 1.8, respectively.
of 1rad/s to 6283rad/s or 1kHz. The theoretical and realized FPAA values for the imple-
mentation of filters of order (1+a) = 1.2, 1.5, and 1.8 are given in Table 4.3. The results
are shown in Fig. 4.9(a) as solid and dashed lines for the theoretical and experimental re-
sults, respectively. Again, the simulated and experimental results show close agreement
with the theoretical, simulated, and experimental stopband attenuations given in Table 4.4.
These results verify that the use of our proposed second order approximation of the frac-
tional Laplacian operator is both valid and stable for the implementation of approximated
fractional step filters.

67
103
104
−50
−40
−30
−20
−10
0
Frequency (Hz)
Mag
nit
ud
e (d
B)
Figure 4.9: Measured and MATLAB simulation results of the magnitude response of theapproximated (1+a) order FLPF, shown as dashed and solid lines, respectively.
Order Theoretical Simulated Experimental(1+a) (dB/dec) (dB/dec) (dB/dec)
1.2 �24 �24.07 �24.021.5 �30 �29.34 �31.401.8 �36 �37.63 �38.42
Table 4.4: Theoretical, simulated, and experimental stopband attenuations of (1+a)order FLPF approximated with equi-ripple approximation realized using an FPAA.
4.3 Summary
In this chapter we present a modification to the 2nd order approximation of the fractional
Laplacian operator obtained through the CFE method [32]. With this modification we are
able to manipulate the error ripples of the approximation, showing that we can create an
equal ripple error response in either magnitude or phase of the approximation. This equal
ripple response has both lower cumulative error and peak error when compared to the orig-
inal approximation. The stability of the modified approximation is examined and shown

68
to be stable for all the values that yield an equal ripple approximation in both phase and
magnitude. A 1.8 order FLPF using the equi-ripple approximation compared to the original
approximation realized on an FPAA is presented to show the advantage of using this ap-
proximation in the realization of fractional filters. Low pass filters or orders (1+a) = 1.2,
1.5, and 1.8 are also presented with the simulation results showing close agreement with
the experimental results while also illustrating that the filter is stable.
CHAPTER 5
TOW-THOMAS BIQUAD REALIZED WITH FRACTIONAL CAPACITOR
Currently there are no commercial fractional capacitors, devices with an impedance Z(s) =
1/Csa where 0 < a < 1, available for the physical implementation of fractional order
circuits. However, there are still reported physical implementations of such devices [8,
43–46] using fractal shapes. A fractal is “a rough or fragmented geometric shape that
can be split into parts, each of which is (at least approximately) a reduced-sized copy of
the whole” [47]. Fractals such as the Sierpinski [48], Tree [43, 45], Hilbert [8], Koch
and Peano [46] structures, when implemented as one of the plates in a capacitor, have
been shown to exhibit fractional order electrical impedances. These fractional capacitors
(FCs) can be used in the realization of fractional systems without an approximation of the
fractional Laplacian operator. In this section we explore the application of two such devices
which were provided to us on loan by Prof. Théodore Cisse Haba from the Département
Génie Electrique et Electronique at the Institut National Polytechnique in Yamoussoukro,
Côte d’Ivoire. These two fractional capacitors are shown in Fig. 5.1(a), labelled as Hilbert
and Arbre, with their fractal structures shown in Fig. 5.1(b) and (c), respectively, with
capacitances of 6.5nF and 1.5nF with a = 0.5, respectively [8, 43]. These devices open
the door to practical applications involving fractional order systems. Using these elements
in traditional continuous time filters we can explore the benefits that accompany the use of
fractional capacitors in filter circuits.

70
(a)
(b)
(c)
Figure 5.1: (a) Packaged fractional capacitors implemented using photolithographicfractal structures on silicon, based on the (b) Hilbert and (c) Tree fractal structures.

71
+
+
+
-
-
-
Figure 5.2: Tow-Thomas biquad topology.
5.1 Tow-Thomas Biquad
The Tow-Thomas biquad [49–51] of Fig. 5.2 is an active-RC topology used to realize
both lowpass and bandpass biquadratic filtering functions. This topology has been widely
used because it is simple, versatile, requires few components, and has very low sensitivities
to changes in the passive RC components and gains of the operational amplifiers [49].
Analysis of this biquad yields the lowpass and bandpass functions
V LPo (s)
Vin(s)= �
R6R1R4R5C1C2
s2 + sR3C1
+ R6R2R4R5C1C2
(5.1)
V BPo (s)
Vin(s)= �
s 1R1C1
s2 + sR3C1
+ R6R2R4R5C1C2
(5.2)
The Tow-Thomas biquad can be used to implement a 2nd order low pass Butterworth
response through selecting the appropriate resistor and capacitor values to realize the de-
sired cutoff frequency, wo, and quality factor, Q, associated with this response. The design
equations to determine the component values are
wo =1p
R2R4C1C2(5.3)
Q =R3C1
wo(5.4)

72
which when we set C1 = C2 = C and R2 = R4 = R and R5 = R6 for simplicity (5.3) and
(5.4) become
wo =1
RC(5.5)
Q =R3
R(5.6)
5.1.1 Fractional Tow-Thomas Biquad
While the traditional Tow-Thomas Biquad uses standard capacitors, it is possible to replace
a capacitor in the system with a fractional capacitor. This approach of replacing traditional
capacitors with fractional capacitors has previously been investigated for both the Sallen-
Key filter and Kerwin-Huelsman-Newcomb biquad [19]. Here, we replace C2 in the Tow-
Thomas Biquad with a fractional capacitor of impedance ZC2 =1
saC2, which modifies the
transfer function at the low pass filter node to
V LPo (s)
Vin(s)=�
1R1R4C1C2
s1+a + saR3C1
+ 1R2R4C1C2
(5.7)
Effectively realizing a fractional step low pass transfer function of order (1+a). Note
that (5.7) is of the form of (2.3) when n = 1 after apply the frequency shift transformation
s = swo
, where wo is the denormalized frequency in rad/s. Applying this transformation
(2.3) becomes
HLP1+a(s) =
k1w1+ao
s1+a + k2wosa + k3w1+ao
(5.8)

73
ValueComponent Fig. 5.2
C1, C2 6.8nFR1, R2, R4, R5, R6 46.8kW
R3 33.1kW
Table 5.1: Component values to realize 2nd order Butterworth LP response with cutofffrequency of 500Hz using the Tow-Thomas Biquad.
Comparing coefficients of (5.7) to (5.8) while ignoring the sign in (5.7) yields the following
relationships
k1 =1
R1R4C1C2w1+ao
(5.9)
k2 =1
R3C1wo(5.10)
k3 =1
R2R4C1C2w1+ao
(5.11)
Therefore, using equations (5.9) to (5.11) the fractional Tow-Thomas biquad can be used
to implement a frequency shifted (1+a) order FLPF of the form proposed in (2.3).
5.2 Simulation and Experimental Results
To initially test the fractional capacitors on loan to us, they were used to replace the ca-
pacitor C2 in the traditional Tow-Thomas biquad of Fig. 5.2, initially designed to realize
a 2nd order low pass Butterworth filter of quality factor Q = 1/p
2 and cutoff frequency
of fo = 500Hz or w0 = 3141.69rad/s. Using the design equations of (5.5) and (5.6) the
component values required for this realization are given in Table 5.1. This circuit was
breadboarded using MC1458 op amps (1MHz gain bandwidth product) with 5% tolerance
resistors and 20% tolerance capacitors. The magnitude response at the low-pass output
node was measured using the HP4395A Network analyzer.
The MATLAB simulations and experimental results of the Tow-Thomas biquad when
C2 = 6.8nF are shown in Fig. 5.3 labelled by ZC2 =1
s6.8nF as dotted and dashed lines,

74
103
104
−35
−30
−25
−20
−15
−10
−5
0
5
Frequency (Hz)
Mag
nit
ud
e (d
B)
Figure 5.3: Magnitude response of Tow-Thomas and fractional Tow-Thomas biquad lowpass function when a = 0.5 as solid and dashed lines, respectively.
respectively. The experimental results show perfect agreement with the simulations, con-
firming the operation of the realized 2nd order Butterworth filter using the Tow-Thomas.
The MATLAB simulations when C2 is replaced by fractional capacitors of values 6.5nF
and 1.5nF with a = 0.5, representing the expected values of the Hilbert and Arbre FCs,
are also shown in Fig. 5.3 as dashed lines labelled ZC2 =1
s0.56.5nF and ZC2 =1
s0.51.5nF , respec-
tively. These two responses both display the fractional step behaviour in the stopband with
attenuations of �30.12dB/dec and �30.52dB/dec very close to theoretical attenuation of
�20(1+0.5) =�30dB/dec. Note that the use of a fractional capacitor with characteristic
a = 0.5 with a capacitance close to that required for our implementation of the frequency
shifted 2nd order LP Butterworth filter, 6.5nF compared to 6.8nF , results in the �3dB fre-
quency increasing from 500Hz to 11.1kHz. To realize this same �3dB frequency using a
traditional capacitor and the same resistor values would require a capacitor of 0.3064nF .
However, both the simulated magnitudes responses using FCs exhibit the undesired peak-
ing in the passband, which is a result of the poles moving closer to the imaginary axis and
the values of k2,3 not being optimized for minimum passband error.

75
The experimental magnitude responses at the LP output node of the realized Tow-
Thomas biquad when C2 was replaced by the the Hilbert and Arbre fractional capacitors
are given in Fig. 5.3 as dotted lines labelled, Hilbert FC and Arbre FC, respectively. Note
that the results for both FCs do not match the theoretical, indicating that how we model the
fractional capacitors in the simulations of our system was incorrect. The transfer function
(5.7) is based on the assumption that the fractional capacitor behaves as the ideal case; that
it is purely capacitive with no resistive components. However, the experimental results in
Fig. 5.3 indicate that this assumption was not valid. Further investigation into the Hilbert
FC indicated that it has a resistance in parallel with its fractional capacitor component, the
impedance model based on this parallel resistance is shown in Fig. 5.4(a). Using this model
in place of C2 in the Tow-Thomas biquad results in the circuit given in Fig. 5.4(b). The
transfer function of the fractional Tow-Thomas biquad at the LP output node, again when
R5 = R6 with the parallel resistance, Rp, becomes
V LPo (s)
Vin(s)=�
1R1R4C1C2
s1+a + s 1RpC2
+ sa 1R3C1
+R2R4+R3Rp
R2R3R4RpC1C2
(5.12)
Note that when (5.12) is compared to (5.7) there is an extra coefficient, s 1RpC2
, and the DC
gain coefficient changes. Therefore, using the fractional capacitor with a parallel resis-
tance we are not able to realize the transfer function of (2.3) which explains the difference
between the theoretical and experimental results using the Hilbert FC.
Conversely, through observation of the experimental results using the Arbre fractional
capacitor, it appeared to behave as an ideal fractional capacitor. As the slope of the stop-
band of the experimental results was parallel to the stopband of the simulated ideal case.
However, while the stopband was parallel to the ideal, the experimental pole frequency was
at a much lower frequency than expected by the reported 1.5nF capacitance of the device.
With the pole frequency occurring around 2�3kHz as opposed to the 20�30kHz expected
from the simulation. Therefore, it appears that the capacitance value of the Arbre FC used
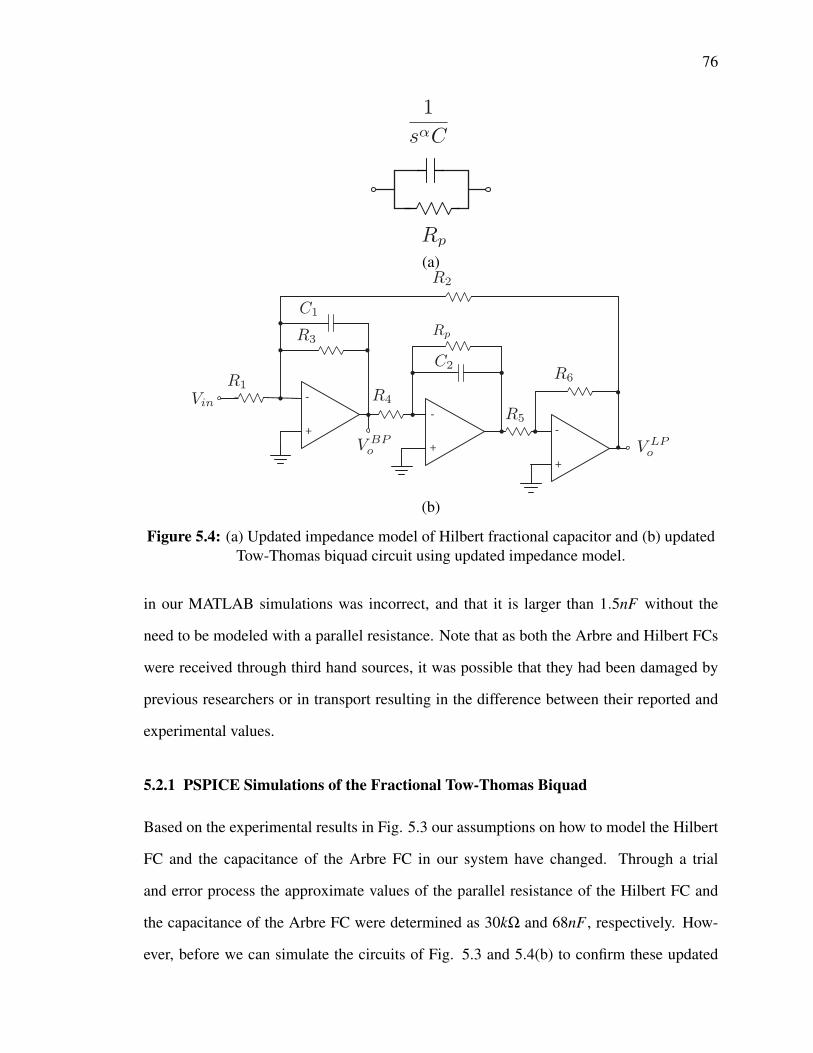
76
(a)
+
+
+
-
-
-
(b)
Figure 5.4: (a) Updated impedance model of Hilbert fractional capacitor and (b) updatedTow-Thomas biquad circuit using updated impedance model.
in our MATLAB simulations was incorrect, and that it is larger than 1.5nF without the
need to be modeled with a parallel resistance. Note that as both the Arbre and Hilbert FCs
were received through third hand sources, it was possible that they had been damaged by
previous researchers or in transport resulting in the difference between their reported and
experimental values.
5.2.1 PSPICE Simulations of the Fractional Tow-Thomas Biquad
Based on the experimental results in Fig. 5.3 our assumptions on how to model the Hilbert
FC and the capacitance of the Arbre FC in our system have changed. Through a trial
and error process the approximate values of the parallel resistance of the Hilbert FC and
the capacitance of the Arbre FC were determined as 30kW and 68nF , respectively. How-
ever, before we can simulate the circuits of Fig. 5.3 and 5.4(b) to confirm these updated

77
ValuesComponent 6.5nF 68nF
Ra 304.95kW 29.150kWRb 2.440MW 233.20kWRc 20.23MW 1.9335MWRd 690.12kW 66.024kWRe 1.0344MW 99.349kWCb 391.37pF 4.094nFCc 506.09pF 5.294nFCd 6.1042pF 638.59pFCe 215.60pF 2.2555nF
Table 5.2: Component values to realize approximated fractional capacitors of 6.5nF and68nF centered around 500Hz when a = 0.5 using RC ladder topology of inset in Fig. 5.5.
models, a fractional capacitor must be approximated that can be simulated using PSPICE.
The fractional capacitors required for these simulations were approximated using Carlson’s
method [29] to a second iteration and realized using the partial fraction decomposition
shown in the insets of Fig. 5.5. The values of resistors and capacitors used in the PSPICE
simulations of the fractional Tow-Thomas biqaud with the approximated FCs are given in
Table 5.1. These values realize approximated FCs of 6.5nF and 68nF with a = 0.5 cen-
tered around a frequency of 500Hz. The process and MAPLE code used to calculate the
component values to realize an approximated fractional capacitor for any capacitance, a ,
and center frequency are presented in Appendix B. Each of the circuits in Fig. 5.5 were
built and simulated in PSPICE using MC1458 op amps and the component values listed
in Tables 5.2 and 5.3. The experimental results compared to the PSPICE simulations of
the modified circuits are shown in Fig. 5.6 as dashed and solid lines, respectively, with the
results using the Hilbert and Arbre fractional capacitors labelled Hilbert FC and Arbre FC,
respectively. The simulations and experimental results show close agreement confirming
that our new assumptions regarding the modeling of the fractional capacitors are valid and
corroborating the fractional behaviour of the capacitors. This fractional behaviour is clearly
evident in the stopband attenuation using the Arbre fractional capacitor. With the attenua-
tion closely matching the theoretical �20(1+a)dB/dec in the stopband. For comparison

78
+
+
+-
-
-
(a)
+
+
+-
-
-
(b)
Figure 5.5: Fractional Tow-Thomas biquad with approximated fractional capacitorsrealized with RC ladders for PSPICE simulation of circuits with the (a) Arbre and (b)
Hilbert FCs.
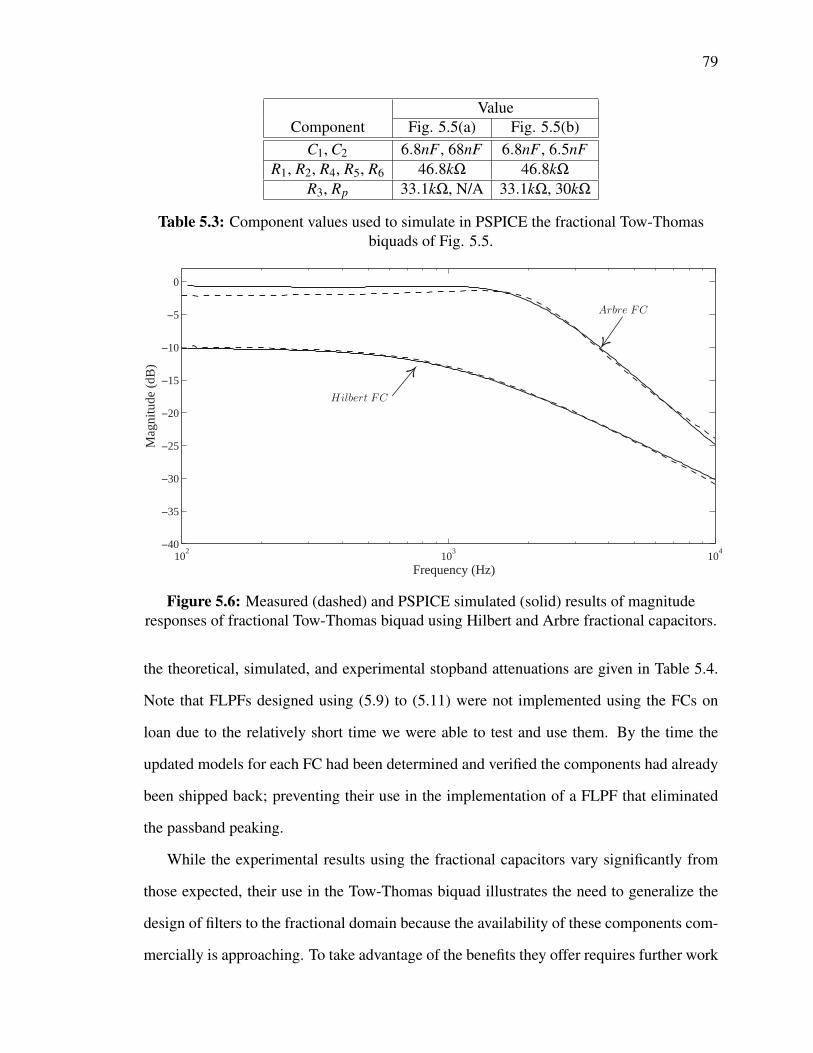
79
ValueComponent Fig. 5.5(a) Fig. 5.5(b)
C1, C2 6.8nF , 68nF 6.8nF , 6.5nFR1, R2, R4, R5, R6 46.8kW 46.8kW
R3, Rp 33.1kW, N/A 33.1kW, 30kW
Table 5.3: Component values used to simulate in PSPICE the fractional Tow-Thomasbiquads of Fig. 5.5.
102
103
104
−40
−35
−30
−25
−20
−15
−10
−5
0
Frequency (Hz)
Mag
nit
ude
(dB
)
Figure 5.6: Measured (dashed) and PSPICE simulated (solid) results of magnituderesponses of fractional Tow-Thomas biquad using Hilbert and Arbre fractional capacitors.
the theoretical, simulated, and experimental stopband attenuations are given in Table 5.4.
Note that FLPFs designed using (5.9) to (5.11) were not implemented using the FCs on
loan due to the relatively short time we were able to test and use them. By the time the
updated models for each FC had been determined and verified the components had already
been shipped back; preventing their use in the implementation of a FLPF that eliminated
the passband peaking.
While the experimental results using the fractional capacitors vary significantly from
those expected, their use in the Tow-Thomas biquad illustrates the need to generalize the
design of filters to the fractional domain because the availability of these components com-
mercially is approaching. To take advantage of the benefits they offer requires further work

80
Order Theoretical Simulated Experimental(1+a) (dB/dec) (dB/dec) (dB/dec)
1.5 �30 �31.6 �31.22
Table 5.4: Theoretical, simulated, and experimental stopband attenuations of fractionalTow-Thomas biquad realized with the Arbre fractional capacitor.
in the exploration and realization of fractional order circuits and systems.
5.3 Summary
In this chapter the use of fractional capacitors, with impedance Z(s) = 1/Csa where 0 <
a < 1, were used to create a fractional Tow-Thomas biquad. The effect of the fractional
capacitor on the �3dB frequency and stopband attenuation compared to the original are
shown through MATLAB simulations. Fractional capacitors realized using a photolitho-
graphic fractal structure on silicon [8, 43, 45] on loan were used in the implementation of
the fractional Tow-Thomas biquad. However, these fractional capacitors do not exhibit the
ideal fractional behaviour. Through modification of the modeling of these capacitors in
our system we are able to closely match the simulations to the experimental results. Using
these fractional capacitors we were able to realize fractional step filters without the use of
the approximated fractional Laplacian operator.

CHAPTER 6
CONCLUSIONS AND FUTURE WORK
6.1 Conclusion
Throughout this work we investigated three areas of research focus. First we investigated
the design and implementation of fractional step filters without the passband peaking of
previously proposed filters. Secondly, a modification of the approximated fractional Lapla-
cian operator to an equi-ripple error was proposed approximation. Finally, the use of actual
fractional capacitors in the fractional Tow-Thomas biquad was used to realize a fractional
step filter.
In the first area of research a new fractional low pass transfer function that maintains
the fractional step through the stopband while maintaining a flat passband was presented.
With the stability investigated we showed it is always stable for orders (1+a)< 2. Both a
method for the implementation of higher order filters and the lowpass to highpass transfor-
mations were presented. Simulations and physically realized integer order filters demon-
strate the fractional step through the stopband for both highpass and lowpass filters of
orders (1+a) and (4+a) in steps of 0.1, 0.5, and 0.9; all showing very close agreement
between the simulated and experimental results. These results verified that the lowpass to
highpass transformation does yield a highpass fractional step filter without peaking in the
passband, and that the selection of constants k2,3 for minimum passband error also applies
to the FHPFs, and the method for implementing higher order fractional step filters was
suitable for both low and high pass filters. This work presented the design process and
equations to realize fractional step filters with an operational amplifier implementation and

82
FPAA hardware.
In the second area of research a modification to a 2nd order approximation of the frac-
tional Laplacian operator obtained through the CFE method [32] was presented. Here we
showed that an equal ripple error response in either magnitude or phase of the approxi-
mation can be created. This equal ripple response has both lower cumulative error and
peak error when compared to the original approximation. The stability of the modified
approximation was examined and shown to be stable for all the values that yield an equal
ripple approximation in both phase and magnitude. Fractional low pass filters of order
(1+a) = 1.8 are realized using the modified and original approximations compared to the
ideal filter to highlight the benefit of the modified approximation and confirming its stabil-
ity. Fractional step filters of orders (1+a) = 1.2, 1.5, and 1.8 are also physically realized
on an FPAA to further validate the application of the approximation.
Finally, fractional capacitors realized using photolithographic fractal structures on sil-
icon [8, 43] were used in the implementation of a fractional Tow-Thomas biquad. Using
the fractional Tow-Thomas biquad we have implemented a fractional step low pass filter of
order (1+a) = 1.5 without the use of the approximated fractional Laplacian operator.
6.2 Contribution
The main contributions of this thesis have been to two areas. First in the creation of frac-
tional step filters that have a flat passband while maintaining the fractional step through
the stopband and secondly in the modification to the approximated fractional Laplacian
operator to create an equiripple error response.
The fractional step filter presented solves the problem of passband peaking previously
seen in other FLPFs. This is a further step in the process to create a more general filter de-
sign process through the import of concepts from fractional calculus. The design equations
and process to create fractional step low and highpass filters of any order are presented.
The realization of these filters using an approximation of the fractional Laplacian operator

83
shows how these filters can be physically implemented using integer order approximations
until such a time as general fractance devices are available. These physical filters verify
that these filters, 1) exhibit the fractional step stopband seen in the simulations, 2) that
the method to implement higher order fractional step filters is valid, and 3) the lowpass to
highpass transformation does create a fractional highpass filter.
The modification of the 2nd order approximated fractional Laplacian operator is benefi-
cial not just to the realization of approximated fractional step filters, but to any application
that requires the use of a fractional Laplacian operator. It shows both lower cumulative
and peak magnitude error over the orignal approximation, and was therefore a closer ap-
proximation to the ideal sa . Therefore its use in any application that requires the fractional
Laplacian operator would show closer agreement to the ideal case than the original approx-
imation.
6.3 Future Work
This work has focused on the importing of concepts from fractional calculus into the design
of filters to create fractional step filters with a flat passband in their magnitude response.
However, this is not the only filter type that could benefit from the use of the fractional
Laplacian operator. These principles could potentially be expanded to the Chebyshev, In-
verse Chebyshev, and Elliptic filter approximations to create fractional step filters with
equiripple stop and passbands. Also, work needs to be done to realize a true fractional
Butterworth filter, that maintains the �3dB frequency for all values of a .
The entirety of this work focused on the magnitude response of fractional step filters.
Leaving the field of the fractional behaviour of the phase response when using the fractional
Laplacian operator completely unexplored. Further work needs to be done to determine
how the phase can be manipulated. This could be further extended to the delay of filters as
well. This could potentially yield delay filters with a fractional step delay giving complete
control of the delay introduced; a very interesting possibility.
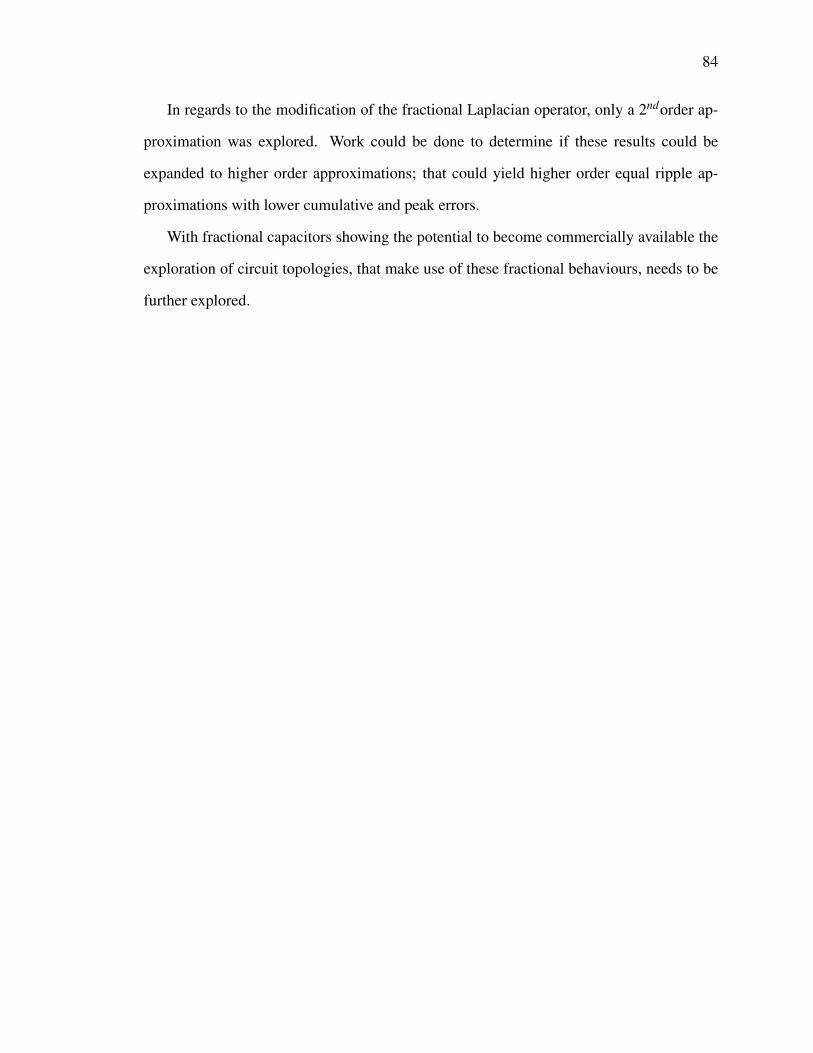
84
In regards to the modification of the fractional Laplacian operator, only a 2ndorder ap-
proximation was explored. Work could be done to determine if these results could be
expanded to higher order approximations; that could yield higher order equal ripple ap-
proximations with lower cumulative and peak errors.
With fractional capacitors showing the potential to become commercially available the
exploration of circuit topologies, that make use of these fractional behaviours, needs to be
further explored.

BIBLIOGRAPHY
[1] A. I. Zverev, Handbook of Filter Synthesis. New York: John Wiley and Sons, 1967.
1, 18
[2] L. P. Huelsman, Active and Passive Analog Filter Design: An Introduction. McGraw-
Hill, Inc., 1993. 2, 3, 25
[3] K. Oldham and J. Spanier, The Fractional Calculus: Theory and Applications of Dif-
ferentiation and Integration to Arbitrary Order. New York: Academic Press, 1974.
4, 5
[4] K. Miller and B. Ross, An introduction to the fractional calculus and fractional dif-
ferential equations. John Wiley and Sons, 1993. 4
[5] S. Samko, A. Kilbas, and O. Marichev, Fractional integrals and derivatives: theory
and application. Gordon and Breach, 1987. 4
[6] M. Ortigueira, “An introduction to the fractional continuous-time linear systems: the
21st century systems,” IEEE Circuits Syst. Mag., vol. 8, no. 3, pp. 19 – 26, Third
Quarter 2008. 5
[7] I. Podlubny, I. Petras, B. Vinagre, P. O’Leary, and L. Dorcak, “Analogue realizations
of fractional-order controllers,” Nonlinear Dynamics, vol. 29, pp. 281–296, 2002. 5,
21, 22

86
[8] T. Haba, G. Loum, J. Zoueu, and G. Ablart, “Use of a component with fractional
impedance in the realization of an analogical regulator of order 1/2,” J. Applied Sci-
ences, vol. 8, no. 1, pp. 59 – 67, Jan. 2008. 5, 69, 80, 82
[9] J. Machado, I. Jesus, A. Galhano, and J. Cunha, “Fractional order electromagnetics,”
Signal Processing, vol. 86, no. 10, pp. 2637 – 44, Oct. 2006. 5
[10] F. Miguel, M. Lima, J. Machado, and M. Crisostomo, “Experimental signal analysis
of robot impacts in a fractional calculus perspective,” J. of Advanced Computational
Intelligence and Intelligent Informatics, vol. 11, p. 1079, 2007. 5
[11] N. F. Ferreira, F. Duarte, M. Lima, M. Marcos, and J. T. Machado, “Application of
fractional calculus in the dynamical analysis and control of mechanical manipulators,”
Fractional Calculus and Applied Analysis, vol. 11, no. 1, pp. 91–113, 2008. 5
[12] A. Calderon, B. Vinagre, and V. Feliu, “Fractional order control strategies for power
electronic buck converters,” Signal Processing, vol. 86, no. 10, pp. 2803 – 19, Oct.
2006. 5, 55
[13] P. Varshney, M. Gupta, and G. Visweswaran, “New switched capacitor fractional or-
der integrator,” J. of Active and Passive Electronic Devices, vol. 2, pp. 187–197, 2007.
5, 55
[14] G. Santamaria, J. Valverde, R. Perez-Aloe, and B. Vinagre, “Microelectronic imple-
mentations of fractional-order integrodifferential operators,” J. Comput. Nonlinear
Dyn., vol. 3, no. 2, p. 021301 (6 pp.), Apr. 2008. 5, 55, 61
[15] K. Biswas, S. Sen, and P. K. Dutta, “Realization of a constant phase element and its
performance study in a differentiator circuit,” IEEE Trans.s on Circuits and Syst. II:
Express Briefs, vol. 53, no. 9, pp. 802 – 806, 2006. 5, 55

87
[16] W. Ahmad, R. Ei-Khazali, and A. Elwakil, “Fractional-order wien-bridge oscillator,”
Electron. Lett. (UK), vol. 37, no. 18, pp. 1110 – 12, Aug. 2001. 5, 55
[17] B. Maundy, A. Elwakil, and S. Gift, “On a multivibrator that employs a fractional
capacitor,” Analog Integrated Circuits and Signal Processing, vol. 62, no. 1, pp. 99 –
103, 2010. 5, 55
[18] A. Radwan, A. Soliman, and A. Elwakil, “First-order filters generalized to the frac-
tional domain,” Journal of Circuits, Systems and Computers, vol. 17, no. 1, pp. 55 –
66, 2008. 5, 6, 8, 20, 21, 55
[19] A. Radwan, A. Elwakil, and A. Soliman, “On the generalization of second-order fil-
ters to the fractional-order domain,” Journal of Circuits, Systems and Computers,
vol. 18, no. 2, pp. 361 – 386, 2009. 5, 6, 21, 55, 72
[20] A. Lahiri and T. K. Rawat, “Noise analysis of single stage fractional-order low pass
filter using stochastic and fractional calculus,” ECTI Transactions on Electrical Eng.,
Electronics, and Communications, vol. 7, no. 2, pp. 136–143, 2009. 5, 55
[21] C. Matos and M. D. Ortigueira, Emerging Trends in Technological Innovation, 2010,
ch. Fractional Filters: An Optimization Approach, p. 361:66. 5, 6, 21, 55
[22] C. K. Alexander and M. N. Sadiku, Fundamentals of Electric Circuits, second edition.
McGraw-Hill, Inc., 2004. 5
[23] A. Radwan, A. Soliman, A. Elwakil, and A. Sedeek, “On the stability of linear sys-
tems with fractional-order elements,” Chaos, Solitons and Fractals, vol. 40, no. 5, pp.
2317 – 2328, 2009. 9, 10, 14
[24] T. Freeborn, B. Maundy, and A. Elwakil, “Towards the realization of fractional step
filters,” in 2010 IEEE International Symposium on Circuits and Systems, 2010, pp.
1037–1040. 10

88
[25] B. Maundy, A. Elwakil, and T. Freeborn, “On the practical realization of higher-order
filters with fractional stepping,” Signal Processing, vol. In Press, Accepted
Manuscript, 2010. [Online]. Available: http://www.sciencedirect.com/science/article/
B6V18-50CDSG6-3/2/2e2a38be62131057cc324441b8445bb1 10
[26] T. Deliyannis, Y. S. Y, and J. Fidler, Continuous time active filter design. New York:
CRC Press LLC, 1999. 17
[27] S. Westerlund, “Dead matter has memory! [capacitor model],” Phys. Scr. (Sweden),
vol. 43, no. 2, pp. 174 – 179, 1991. 21
[28] S. Westerlund and L. Ekstam, “Capacitor theory,” IEEE Transactions on Dielectrics
and Electrical Insulation, vol. 1, no. 5, pp. 826 – 839, 1994. 21
[29] G. Carlson and C. Halijak, “Approximation of fractional capacitors (1/s)1/n by regular
newton process,” IEEE – Transactions on Circuit Theory, vol. CT-11, no. 2, pp. 210
– 213, 1964. 21, 77, 100
[30] K. Matsuda and H. Fujii, “H optimized wave-absorbing control: analytical and ex-
perimental results,” J. Guid. Control Dyn. (USA), vol. 16, no. 6, pp. 1146 – 53, Nov.
1993. 21
[31] A. Oustaloup, F. Levron, B. Mathieu, and F. Nanot, “Frequency-band complex non-
integer differentiator: characterization and synthesis,” IEEE Trans. Circuits Syst. I,
Fundam. Theory Appl. (USA), vol. 47, no. 1, pp. 25 – 39, Jan. 2000. 21
[32] B. Krishna and K. Reddy, “Active and passive realization of fractance device of order
1/2,” Active and Passive Electronic Components, vol. 2008, 2008. 21, 55, 57, 67, 82
[33] A. Djouambi, A. Charef, and A. Besancon, “Optimal approximation, simulation and
analog realization of the fundamental fractional order transfer function,” Int. J. Appl.
Math. Comput. Sci., vol. 17, no. 4, pp. 455–462, 2007. 22

89
[34] J. Friend, C. Harris, and D. Hilberman, “Star: An active biquadratic filter section,”
IEEE Trans. Circuits Syst., vol. CAS-22, no. 2, pp. 115 – 121, February 1975. 25
[35] STMicroelectronics, High Performance Dual Operational Amplifiers, MC1458
datasheet, 2001 [revised December 2001]. 29
[36] Anadigm, 3rd Generation Dynamically Reconfigurable dpASP, AN231E04 Datasheet
Rev 1.1, 2007. 33
[37] T. Freeborn, B. Maundy, and A. Elwakil, “Fpaa implementation of fractional step
filters,” IET Circuits, Devices and Systems, Accepted May 26 2010. 33
[38] Anadigm, FilterBilinear CAM Documentation, 2001. 34
[39] ——, FilterBiquad CAM Documentation, 2001. 34
[40] ——, App Note 305: Interfacing Analog Signals to the Anadigmvortex FPAA Devices,
2003. 43, 44
[41] TLE207x, TLE207xA Excalibur Low-Noise High-Speed JFET-Input Operational Am-
plifiers (version C), Texas Instruments, Dec 2009. 44
[42] T. Freeborn, B. Maundy, and A. Elwakil, “Second order approximation of the frac-
tional laplacian operator for equal-ripple response,” in 2010 IEEE Midwest Sympo-
sium on Circuits and Systems, 2010. 57
[43] T. Haba, G. Ablart, and T. Camps, “The frequency response of a fractal photolitho-
graphic structure,” IEEE Trans. Dielectr. Electr. Insul., vol. 4, no. 3, pp. 321 – 6, June
1997. 69, 80, 82
[44] T. Haba, G. Ablart, T. Camps, and F. Olivie, “Influence of the electrical parameters on
the input impedance of a fractal structure realised on silicon,” Chaos Solitons Fractals
(UK), vol. 24, no. 2, pp. 479 – 90, 2005/04/. 69

90
[45] G. Ablart, T. Haba, and G. Loum, “An analytical expression for the input impedance
of a fractal tree obtained by a microelectronical process and experimental measure-
ments of its non-integral dimension,” Chaos Solitons Fractals (UK), vol. 33, no. 2,
pp. 364 – 73, July 2007. 69, 80
[46] I. S. Jesus, J. A. T. Machado, and M. F. Silva, “Fractional order capacitors,” Pro-
ceedings of the IASTED International Conference on Modelling, Identification, and
Control, MIC, 2008. 69
[47] B. B. Mandelbrot, The Fractal Geometry of Nature. New York: W.H. Freeman and
Company, 1983. 69
[48] J. Clerc, A.-M. Tremblay, G. Albinet, and C. Mitescu, “A. c. response of fractal net-
works,” Journal de physique. Lettres, vol. 45, no. 19, pp. 913 – 924, 1984. 69
[49] J. Tow, “Active rc filters-state-space realization,” IEEE Proceedings, vol. 56, no. 6,
pp. 1137 – 1139, 1968. 71
[50] L. Thomas, “The biquad: Part i - some practical design considerations,” IEEE Trans.
Circuit Theory (USA), vol. CT-18, no. 3, pp. 350 – 7, May 1971. 71
[51] ——, “The biquad: Part ii - a multipurpose active filtering system,” IEEE Trans.
Circuit Theory (USA), vol. CT-18, no. 3, pp. 358 – 61, May 1971. 71

APPENDIX A
FPAA EXPERIMENTAL RESULTS OF FRACTIONAL STEP FILTERS
In this appendix we present the complete set of experimental results of the approximated
fractional step filters implemented using the AN231E04 FPAA compared to the MATLAB
simulated transfer functions. The experimental setup remains the same as presented in Fig.
3.14(b). The only changes are the addition of the bilinear and/or biquadratic filter CAMs to
Fig. 3.9 to realize the correct order of filter. These results further verify that the presented
method for implementing a higher order fractional step filter works for both lowpass and
highpass filters, maintaining the fractional step without the passband peaking.
A.0.1 Fractional Low Pass Filters
For complete testing purposes, low pass approximated fractional step filters of orders (1+
a), (2+a), (3+a), and (4+a) were implemented on the AN231E04. These results are
presented in Figs. A.1 to A.4, respectively, with the MATLAB simulations presented as
solid lines and the experimental results as dashed.
A.0.2 Fractional High Pass Filter Magnitude Responses
For complete testing purposes, high pass approximated fractional step filters of orders (1+
a), (2+a), (3+a), and (4+a) were implemented on the AN231E04. The magnitude
and phase responses are presented in Figs. A.5 to A.8, respectively, with the MATLAB
simulations presented as solid lines and the experimental results as dashed.

92
103
104
−50
−40
−30
−20
−10
0
Frequency (Hz)
Mag
nit
ud
e (d
B)
(a)
103
104
−140
−120
−100
−80
−60
−40
−20
Frequency (Hz)
Ph
ase
(deg
rees
)
(b)
Figure A.1: MATLAB simulation and FPAA experimental results of the (a) magnitudeand (b) phase responses of the approximated (1+a) order FLPFs shown as solid and
dashed lines, respectively.
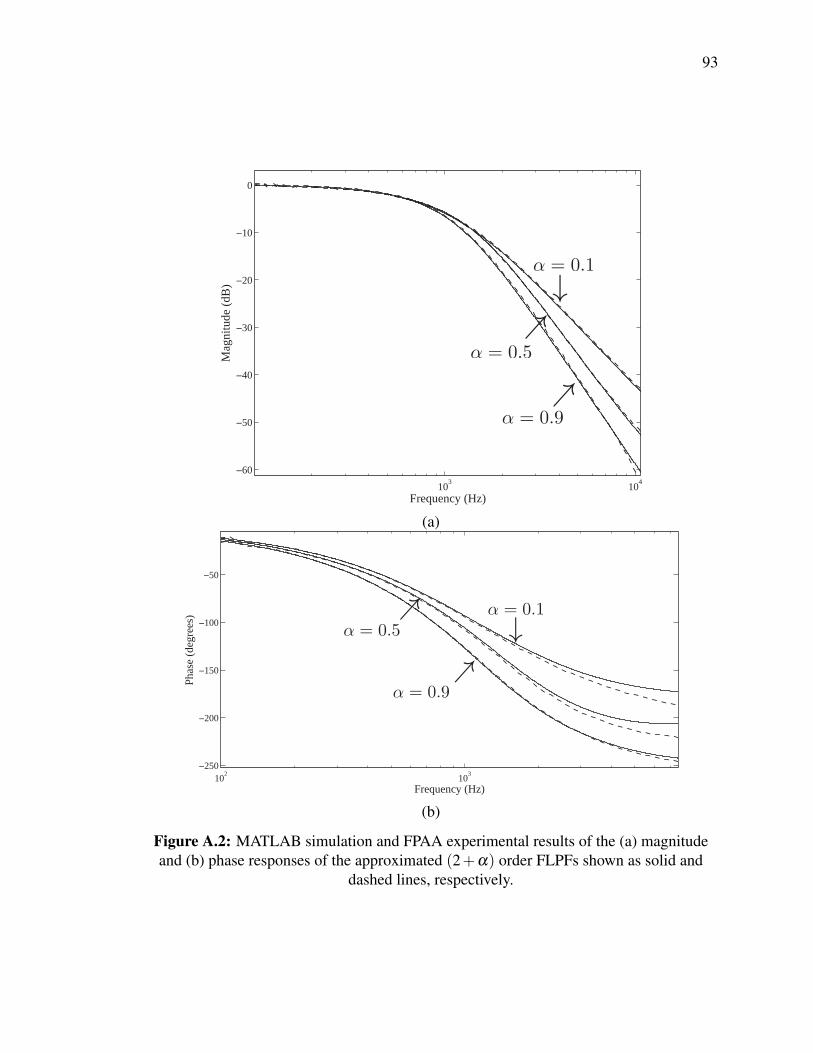
93
103
104
−60
−50
−40
−30
−20
−10
0
Frequency (Hz)
Mag
nit
ude
(dB
)
(a)
102
103
−250
−200
−150
−100
−50
Frequency (Hz)
Ph
ase
(deg
rees
)
(b)
Figure A.2: MATLAB simulation and FPAA experimental results of the (a) magnitudeand (b) phase responses of the approximated (2+a) order FLPFs shown as solid and
dashed lines, respectively.

94
103
104
−70
−60
−50
−40
−30
−20
−10
0
Frequency (Hz)
Mag
nit
ud
e (d
B)
(a)
102
103
−300
−250
−200
−150
−100
−50
Frequency (Hz)
Ph
ase
(deg
rees
)
(b)
Figure A.3: MATLAB simulation and FPAA experimental results of the (a) magnitudeand (b) phase responses of the approximated (3+a) order FLPFs shown as solid and
dashed lines, respectively.
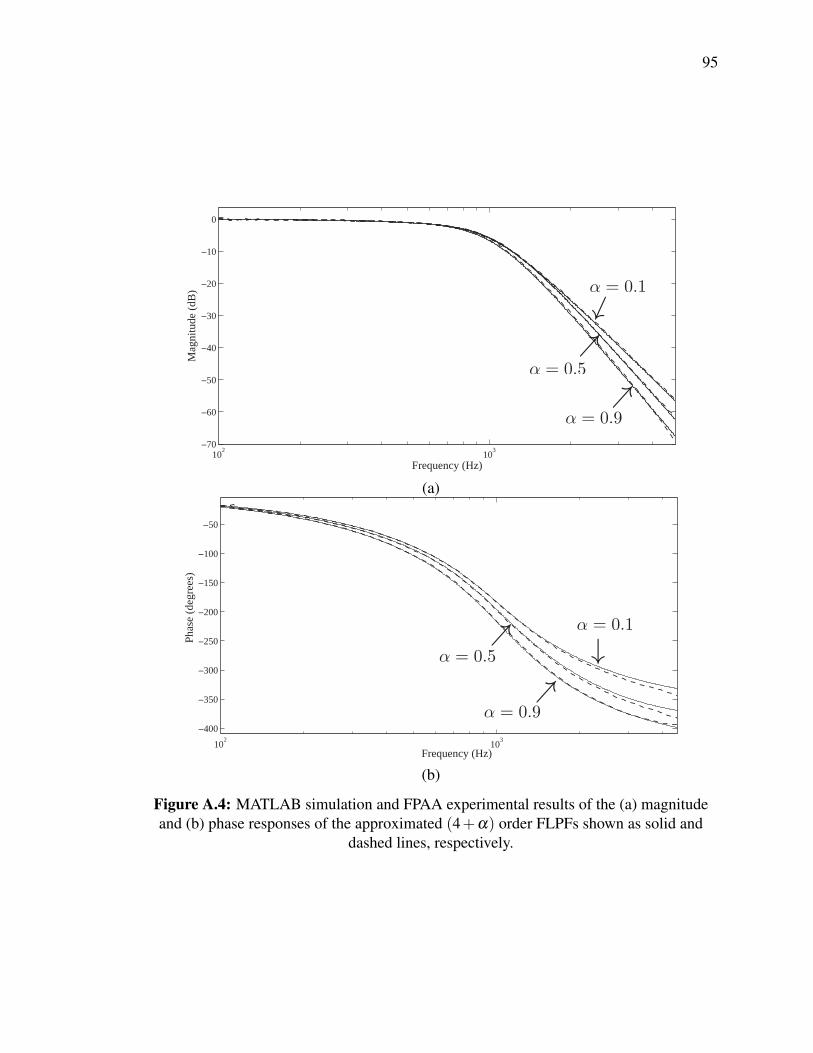
95
102
103
−70
−60
−50
−40
−30
−20
−10
0
Frequency (Hz)
Mag
nit
ud
e (d
B)
(a)
102
103
−400
−350
−300
−250
−200
−150
−100
−50
Frequency (Hz)
Ph
ase (
deg
rees)
(b)
Figure A.4: MATLAB simulation and FPAA experimental results of the (a) magnitudeand (b) phase responses of the approximated (4+a) order FLPFs shown as solid and
dashed lines, respectively.
96
103
104
105
−60
−50
−40
−30
−20
−10
0
Frequency (Hz)
Mag
nit
ud
e (d
B)
(a)
103
104
−350
−300
−250
−200
Frequency (Hz)
Ph
ase
(deg
rees
)
(b)
Figure A.5: MATLAB simulation and FPAA experimental results of the (a) magnitudeand (b) phase responses of the approximated (1+a) order FHPFs shown as solid and
dashed lines, respectively.
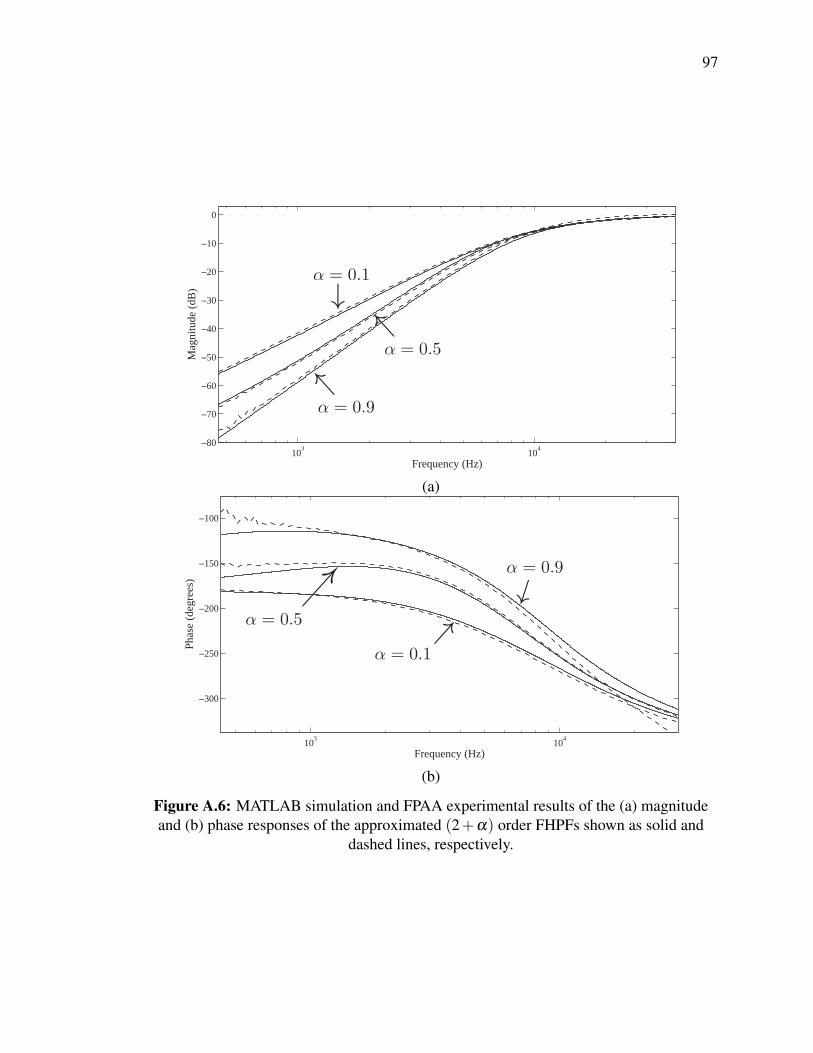
97
103
104
−80
−70
−60
−50
−40
−30
−20
−10
0
Frequency (Hz)
Mag
nit
ud
e (d
B)
(a)
103
104
−300
−250
−200
−150
−100
Frequency (Hz)
Ph
ase
(deg
rees
)
(b)
Figure A.6: MATLAB simulation and FPAA experimental results of the (a) magnitudeand (b) phase responses of the approximated (2+a) order FHPFs shown as solid and
dashed lines, respectively.

98
104
−60
−50
−40
−30
−20
−10
0
Frequency (Hz)
Mag
nit
ud
e (d
B)
(a)
103
104
−300
−250
−200
−150
−100
−50
Frequency (Hz)
Ph
ase
(deg
rees
)
(b)
Figure A.7: MATLAB simulation and FPAA experimental results of the (a) magnitudeand (b) phase responses of the approximated (3+a) order FHPFs shown as solid and
dashed lines, respectively.

99
104
−70
−60
−50
−40
−30
−20
−10
0
Frequency (Hz)
Mag
nit
ud
e (d
B)
(a)
104−300−250−200−150−100−50
050
Frequency (Hz)
Ph
ase
(deg
rees
)
(b)
Figure A.8: MATLAB simulation and FPAA experimental results of the (a) magnitudeand (b) phase responses of the approximated (4+a) order FHPFs shown as solid and
dashed lines, respectively.

APPENDIX B
REALIZATION OF AN APPROXIMATED FRACTIONAL CAPACITOR
Before we could simulate the approximated fractional Tow-Thomas biquad of Fig. 5.5,
an approximated fractional capacitor must be built. A realization using Carlson’s method
[29] was selected to model the fractional capacitors. Using this method approximations
of the general fractional capacitor, (1/s)1/n for n > 1, are possible. The order of these
approximations increasing as the number of iterations in the Newton process increases.
The function used in the regular Newton process for these approximations is
F(x) = x · (n�1)xn +(n+1)(1/s)(n+1)xn +(n�1)(1/s)
(B.1)
where x is the previous iteration. Using this process to approximate a fractional capacitor
when n = 2, or a = 0.5, using an initial assumption x0 = 1 yields
x1 =s+33s+1
(B.2)
as the first iteration approximatingp
1/s. The second iterate approximatingp
1/s is
x2 =s4 +36s3 +126s2 +84s+99s4 +84s3 +126s2 +36s+1
(B.3)
The magnitude response of this approximation is given in Fig. B.1. Note that this creates
an approximation of the fractional capacitor centered around the frequency 1rad/s. Using
the approximation of (B.3), the fractional Laplacian operator can be physically realized

101
10−2
10−1
100
101
102
−20
−15
−10
−5
0
5
10
15
20
Frequency (rad/s)
Mag
nit
ud
e (d
B)
Figure B.1: Magnitude response of the approximated fractional capacitor (dashed)compared to the ideal fractional capacitor of impedance Z(s) = 1/s0.5.
Figure B.2: RC ladder network to realize 4th order approximated fractional Laplacianoperator.
using the RC ladder network in Fig. B.2. The impedance of this RC ladder network is
Zin = Ra +1/Cb
s+ 1RbCb
+1/Cc
s+ 1RcCc
+1/Cd
s+ 1RdCd
+1/Ce
s+ 1ReCe
(B.4)
The resistor and capacitor values for the RC ladder in Fig. B.2 can be determined

102
through equating terms of (B.3) after a CFE of (B.4), which after the CFE becomes
1s0.5 ⇡ 1
9+
0.2291313787s+0.03109120413
+0.2962962975
s+0.3333333333+
1.899696037s+7.548632170
+0.5378392488
s+1.420276625(B.5)
We can approximate a fractional capacitor with any desired capacitance, C, centered around
any frequency, wc, by applying magnitude and frequency scaling factors to the component
values in the ladder realization. The resistor and capacitor values become
Rs = R · km (B.6)
Cs =C
k f km(B.7)
where Rs and Cs are the scaled resistor and capacitor values, R and C are the unscaled
resistor and capacitor values, km = 1Cw(1/n)
cis the magnitude scaling factor and k f = wc is the
frequency scaling factor. The magnitude response of the approximated fractional capacitor
after applying the scalings when C = 6.8nF and wc = 1000rad/s is shown in Fig. B.3.
The code used to generate the resistor and capacitor values for a fractional capacitor with
capacitance of 6.8nF , centre frequency of wc = 500rad/s, and n = 2 from (B.3) in MAPLE
is given in Fig. B.4.

103
101
102
103
104
105
110
115
120
125
130
135
140
145
150
155
X: 1000Y: 133.3
Frequency (rad/s)
Mag
nit
ude
(dB
)
Figure B.3: Magnitude response of the approximated fractional capacitor (dashed)compared to the ideal fractional capacitor of impedance Z(s) = 1/Cs0.5 after applying the
scalings when C = 6.8nF and wc = 1000rad/s.

104
Figure B.4: MAPLE code to calculate resistor and capacitor values for the ladderrealization of a fractional capacitor, Z(s) = 1/Cs0.5, of 6.8nF at a centre frequency of
500Hz.