differences in spatial knowledge acquired from maps … · differences in spatial knowledge...
TRANSCRIPT

COGNITIVE PSYCHOLOGY 14, 560-589 (1982)
Differences in Spatial Knowledge Acquired from Maps and Navigation
PERRY W. THORNDYKE Perceptronics, Inc.
AND
BARBARA HAYES-ROTH Stanford University
Models of the spatial knowledge people acquire from maps and navigation and the procedures required for spatial judgments using this knowledge are proposed. From a map, people acquire survey knowledge encoding global spatial relations. This knowledge resides in memory in images that can be scanned and measured like a physical map. From navigation, people acquire procedural knowledge of the routes connecting diverse locations. People combine mental simulation of travel through the environment and informal algebra to compute spatial judgments. An experiment in which subjects learned an environment from navigation or from a map evaluates predictions of these models. With moderate exposure, map leam- ing is superior for judgments of relative location and straight-line distances among objects. Learning from navigation is superior for orienting oneself with respect to unseen objects and estimating route distances. With extensive exposure, the per- formance superiority of maps over navigation vanishes. These and other results are consonant with the proposed mechanisms.
Point to the Statue of Liberty from where you are sitting. Now point to the local airport from where you are sitting. These tasks illustrate the use of different types of spatial knowledge to compute an orientation judg- ment. For the first task, most individuals use a mental image of a U.S. map and an estimate of their current compass bearing to compute the direction of the Statue of Liberty. For the second task, most individuals use knowledge of the route from their present location to the airport to estimate its direction. Even grade school children can use these two types of knowledge and computational processes to perform orientation judg- ments (Lord, 1941).
These examples illustrate two of the many real-world problems requir-
This research was conducted while both authors were employed at The Rand Corporation. The work was supported under Contract NOOO14-78-C-0042 from the Office of Naval Re- search. We gratefully acknowledge the assistance of Doris McClure, who tested subjects and analyzed data. William Chase and Ben Kuipers provided thoughtful comments on earlier versions of the paper. Requests for reprints may be addressed to Perry W. Thorndyke, Perceptronics, Inc., 6271 Variel Avenue, Woodland Hills, CA 91367.
560 OOlO-0285/8UO40560-30$05.00/O Copyright 0 1982 by Academic Press, Inc. All rights of reproduction in any form reserved.

LEARNING FROM MAPS AND NAVIGATION 561
ing spatial cognition-that is, the acquisition and use of knowledge about large-scale space. While these examples perhaps overgeneralize and oversimplify the methods people use to produce their estimates, they illustrate three important points about spatial cognition. First, people have various types of spatial knowledge that they acquire from different sources (e.g., maps, navigation experience, verbal descriptions or direc- tions, photographs). For example, one might acquire a spatial overview of a town by studying a map and detailed route knowledge from navigation. Second, people use different procedures to make spatial judgments, de- pending on the type of knowledge they have. As illustrated above, a person might judge the direction of a destination differently when using a learned map than when using knowledge derived from navigation. Finally, the accuracy of a spatial judgment depends on the accuracy of both the underlying knowledge and the computational procedure operating on the knowledge. Thus, for example, a person may have an accurate mental map of the U.S. but may err when computing the direction of the Statue of Liberty.
Much prior research has investigated the knowledge people acquire about the space around them. In environmental psychology, numerous studies have investigated correlations between a variety of subject vari- ables (e.g., socioeconomic status, length of residence, age, and other personal attributes) and the detail and accuracy of subjects’ reproduced maps of their locale (e.g., Appleyard, 1970; Canter, 1977; Downs & Stea, 1973, 1977; Evans, 1980; Golledge & Rushton, 1976; Milgram & Jodelet, 1976; Moore & Golledge, 1976). These studies have demonstrated that the type and amount of spatial knowledge people have change with increased familiarity with the environment. Generally, however, such studies do not control subjects’ environmental experiences, so it is unclear how and from what sources subjects derive their knowledge.
Other research has investigated the accuracy of spatial knowledge acquired through navigation experience (Acredelo, Pick, & Olsen, 1975; Hardwick, McIntyre, & Pick, 1976; Hart & Moore, 1973; Herman & Siegel, 1977; Piaget & Inhelder, 1967; Piaget, Inhelder, & Szeminska, 1960; Shemyakin, 1962; Siegel & White, 1975; Siegel, Kirasic, & Kail, 1978; Thorndyke, 1980). These studies demonstrated that subjects’ knowledge of the locations of objects in the environment becomes more accurate with increased experience. Most researchers interpret these changes as qualitative shifts in the representation of space from memory for traversed routes to a more abstract, maplike representation of object locations (Appleyard, 1969, 1970; Piaget, Inhelder, & Szeminska, 1960; Siegel et al., 1978; Siegel & White, 1975; Shemyakin, 1962). However, these studies did not investigate the supposed similarities between judg-

562 THORNDYKE AND HAYES-ROTH
ments based on maps and judgments based on experientially derived knowledge. Direct comparisons of performance based on different types of learning experiences have considered only route-following (Wetherell, 1979) or route-planning (Bar-tram, 1980) tasks. No studies have investi- gated people’s ability to orient themselves, estimate distances, or locate relative positions of objects under different learning conditions.
This paper investigates differences in spatial knowledge and estimation procedures derived from two typical sources of information about large- scale space: maps and navigation experience. We begin with a set of assumptions about the knowledge individuals acquire when exposed to these two types of spatial information. We present process models for how subjects produce spatial judgments from either memory of a map or of traversed routes in the environment. The models support a variety of predictions for the relative accuracy of subjects’ judgments.
We then describe an experiment in which subjects learned locations in an environment and routes connecting them either by memorizing a map or by navigating in the environment. Subjects performed a variety of spatial judgments using their knowledge of the space. These tasks in- cluded placing the locations in the proper spatial configurations on an external map (location task), pointing in the direction of unseen locations from a particular location in the environment (orientation task), and esti- mating locations along routes (route distance estimation) and along a straight line (Euclidean distance estimation).
KNOWLEDGE REPRESENTATIONS FOR LARGE-SCALE SPACE
Earlier research has suggested a gross theoretical distinction between procedural descriptions and survey knowledge (e.g., Siegel & White, 1975; see also Thorndyke, 1981a; Thomdyke & Hayes-Roth, Note 1). Procedural descriptions refer to knowledge acquired about the routes between locations. Such knowledge typically derives from direct naviga- tion experiences and encodes a sequential record of the space between start points, subsequent landmarks, and destinations. At a minimum, a procedural description of the route between A and B must identify loca- tions at which the navigator must change direction and specify the action to be taken at those locations (e.g., “turn right at the comer of Ocean Avenue and Wilshire Boulevard”). This sequence of prescribed actions may be thought of as a set of stimulus-response pairs or condition-ac- tion rules (Kuipers, 1978; Thorndyke, 1981a).
Typically, however, a person’s procedural knowledge contains more detailed information about the traveled route. This information might in- clude impressions of the distance traveled along each leg (straight-line segment) of the route, the angle of the turns between legs, and terrain

LEARNING FROM MAPS AND NAVIGATION 563
features along the route. This representation, then, contains sequentially organized knowledge of details at different locations in the space.
In contrast, survey knowledge refers to knowledge of the topographic properties of an environment. These properties include the location of objects in the environment relative to a fixed coordinate system (e.g., compass bearings), the global shapes of large land features (e.g., streets, parks, lakes), and the interobject Euclidean (i.e., straight-line) distances. Such information is not available from direct experience in the environ- ment, but is portrayed on maps. Thus, people frequently learn maps and use them to make routine spatial judgments (Kosslyn, Ball, & Reiser, 1978; Thomdyke, 1981b).
We now consider the differences in the way people encode and use knowledge acquired either from maps or navigation.
We assume that when learning maps intentionally, the individual ac- quires an image of the depicted space. In making this assumption, we do not wish to raise fundamental representational issues (Anderson, 1978; Hayes-Roth, 1979). We acknowledge that it may be possible to represent survey knowledge in discrete propositions (e.g., Kuipers, 1978; Stevens & Coupe, 1978). Further, the memorized maps can, in certain cir- cumstances, distort the spatial relations on the map (Milgram & Jodelet, 1976; Stevens & Coupe, 1978). Our evidence, however, indicates that people use mental images to learn maps accurately and to scan previously learned maps to judge spatial relations (Thorndyke, 1981b; Thomdyke & Stasz, 1980). Therefore, throughout the following discussion we assume an isomorphism between the mental representation of a map and the physical map.
The individual’s perspective on the memory representation corre- sponds to the canonical vertical view he or she has of the studied map. The individual “views” the memory representation from above and out- side of the depicted space. Using the memory representation to judge spatial relations requires essentially the same procedures the individual would use on external maps. Visual search permits the individual to iden- tify the exact and relative locations of particular objects. Measurement procedures permit the individual to assess Euclidean (i.e., straight-line) distances and compass bearings between objects.
During navigation, on the other hand, the individual acquires pro- cedural knowledge of the environment. This knowledge encodes observed features in the environment and action sequences performed to navigate between locations. A typical action in a sequence describes a behavior executed at a particular location (e.g., turn right at the corner of Sunset Boulevard and Rockingham Avenue). The individual’s perspective on the memory representation corresponds to the canonical horizontal view he or she has of the environment during navigation. That is, the individual

564 THORNDYKE AND HAYES-ROTH
“views” the representation from some point on the ground, in the same plane as the objects in the space.
To compute spatial judgments, the individual brings to bear on the memory representation essentially the same procedures he or she brings to bear during navigation. Mental simulation of navigation through the environment permits the individual to identify the route distances be- tween objects, the sequence of features encountered along the route, and the actions performed when navigating between points. Computational procedures operating on the raw data obtained from mental simulation permit the individual to assess Euclidean distances and compass bearings between objects. That is, determining the location of a distant point with respect to the present position depends on knowledge of the route be- tween the two points. (We shall describe and illustrate this procedure in the discussion following the presentation of the empirical data.)
Increasing navigation experience affects the content of the memory representation. As the individual travels and becomes familiar with a variety of routes through the environment, he or she identifies points of intersection for multiple routes and adopts a canonical reference frame (e.g., compass directions). This knowledge, along with route distance knowledge and knowledge of compass bearings along the routes, can support the automatic and unconscious reorganization of memory into a survey representation. The new structure encodes relative object loca- tions and Euclidean distances. Such survey knowledge permits the direct retrieval of spatial relations between points without reference to the routes connecting them. We believe that this knowledge is not identical to the survey knowledge one acquires from a map. Rather, we conceptualize this change as the development of translucence in the ground-based procedural representation. That is, the individual can essentially “view” or access distant locations in the environment along a straight line of sight, through intervening points. Similarly, the individual can simulate straight-line traversal between two points without having to circumnavi- gate intervening objects.
Indeed, numerous studies have found that survey knowledge improves with increasing residence in a community (e.g., Appleyard, 1970; Gol- ledge 8z Zannaras, 1973; Ladd, 1970), although such studies fail to control subjects’ access to maps or other direct sources of survey knowledge. In laboratory studies using controlled exposures to the environment, sub- jects with limited navigation experience demonstrate accurate procedural knowledge but nonveridical survey knowledge. However, their survey knowledge and orientation ability generally improve with increasing num- bers of trips through the environment (Allen, Siegel, & Rosinski, 1978; Herman & Siegel, 1977; Kozlowski & Bryant, 1977).
To test our assumptions concerning the types of spatial knowledge derived from different sources, we devised an experiment in which sub-
LEARNING FROM MAPS AND NAVIGATION 565
jects learned locations in an environment either by memorizing a map or by navigating in the environment. They then performed a variety of spa- tial judgments using their knowledge of the space. We formulated process models for the procedures that subjects with different learning experi- ences would use to compute their estimates. These models, combined with our assumptions about the memory representations acquired from different experiences, supported a variety of predictions for subjects’ performance on the tasks. We first present our experimental method, then a detailed discussion of our process models and attendant predictions.
Materials
METHOD
We sought an environment that would be relatively easy to learn yet would be sufftciently complex to make the tasks of orientation, location, and distance estimation somewhat dif- ficult. We selected as our environment the first floor of The Rand Corporation in Santa Monica. This environment is shown to accurate scale and with its correct compass orienta- tion in Fig. 1. The space comprises two buildings separated by an enclosed hall with a 50” jog. The buildings contain several prominent public areas (the labeled, darkened areas on the map), a maze of hallways (indicated by the white lines running through the buildings), offices (indicated by the shaded areas surrounding the halls), and interior courtyards (indicated by the white rectangles on the floor plan of the larger building). The distance from the North- west Lobby to the South Lobby is 627 ft along a straight line and 877 ft via the shortest set of hallways. With the exception of the hall connecting the two buildings, all hallways inter- sect at right angles. Because of the relative orientation of the two buildings, however, it is nontrivial to orient oneself with respect to locations in a different building or to produce an accurate map of the environment based on limited navigation experience.
Subjects
Forty-eight female volunteers participated for pay. Subjects in the navigation-learning conditions were secretaries or research assistants employed at Rand. These subjects’ high- est level of educational achievement was a high school diploma or college B.A. Subjects in the map-learning conditions were students at Santa Monica College.
Design The subjects comprised two training conditions with 24 subjects in each. In the navigation
condition, subjects’ knowledge of locations within Rand derived solely from navigation experience. None of these subjects reported having studied a map of the floor plan during their employment at Rand. In the map-learning condition, no subject had been inside Rand prior to the experiment. These subjects acquired knowledge of locations and halls within Rand solely from studying the map shown in Fig. 1.
Within each training condition, three groups of subjects varied in the amount of exposure they had to the spatial information. The navigation subjects comprised subjects who had worked at Rand for either 1 to 2 months, 6 to 12 months, or 12 to 24 months. Each group contained eight subjects. The map-learning subjects differed in the amount of time they studied the map. One group studied the map until they could redraw the map without error in the configuration or placement of halls and locations. A second group studied until they reached this criterion and then spent an additional 30 min studying the map. The third group studied the map beyond criterion for an additional 60 min.

566 THORNDYKE AND HAYES-ROTH

LEARNING FROM MAPS AND NAVIGATION 567
The set of test items comprised 42 pairs of locations within Rand. The first location of each pair was designated the start point, the second location the destination. The 42 pairs were composed by crossing six start points (Supply Room, Computer Center, Administrative Conference Room, East Lobby, Snack Bar, and South Lobby) with seven destinations- namely, the Northwest Lobby, the Cashier, and the remaining five start points.
For each test item, subjects performed five judgments: route distance (the distance from the start point to the destination along the hallways), Euclidean distance (the straight-line distance from the start point to the destination), orientation (pointing to the destination from the start point), simulated orientation (while in a closed offtce, pointing to the destination from an imagined position at the start point), and location (indicating the location of the destination on a piece of paper containing the start point and another reference point).
Procedure Subjects were tested individually. The experimenter informed each subject that the pur-
pose of the study was to assess the accuracy of people’s spatial knowledge given different types and amounts of learning experience.
Each map-learning subject was seated in the experimenter’s offtce and told that she was to learn the floor plan of Rand (shown in Fig. 1), including the shape of the buildings, the names and locations of the public areas, and the directions of the halls through the buildings. Although the map contained scale information, the experimenter did not instruct the subject to learn metric distances. Each subject studied the map on a series of study-recall trials. On each trial, the subject was given a copy of the map to study for 2 min. At the end of this time, the experimenter removed the map and asked the subject to draw the map on a blank piece of paper. After the subject had completed the drawing, the experimenter provided feedback to the subject on the correct and incorrect features of the map. The subject then studied the map for another 2 min. The study-recall cycle was repeated until’the subject had depicted the topological properties of the map and labeled it correctly on two consecutive trials. Subjects in the two overlearning groups then continued this study-recall procedure for either 30 or 60 min.
Navigation subjects, who had preexperimental knowledge of Rand from either 1 to 2, 6 to 12, or 12 to 24 months of walking in the halls, received no additional training.
The experimenter then took each subject to the first start point, the Supply Room. The experimenter placed a cardboard compass wheel with a 12-in. radius on the floor in front of the subject. The compass wheel contained rays numbered from 0 to 355” in 5” increments. The wheel was oriented along the minor axis of the building in which the subject was standing. The experimenter then asked the subject to face in the direction marked 0”. She then informed the subject that she would read to her a succession of locations within Rand. For each location, the subject was to perform three estimates. First, the subject indicated to the nearest degree the direction to the center of the destination room. Second, the subject estimated the distance in feet to the center of the destination room along the ray indicated by the previous judgment (i.e., the Euclidean distance). Third, the subject estimated the dis- tance in feet to the destination along the shortest path through the hallways. The experi- menter explicitly indicated the precise route she wished the subject to estimate in order to avoid any ambiguity about the shortest route. To aid the subject in estimating distances, the experimenter told the subject that the route distances from the center of the Snack Bar to the center of the Common Room and across the Computer Center were both 100 ft.
When the subject had performed the seven sets of estimates from the Supply Room, the experimenter led the subject to the next start point, the Computer Center. The procedure was repeated in identical fashion, except that the compass wheel was aligned in this room (and all subsequent start points) so that the 0” ray was parallel to the minor axis of the building (i.e., at a compass bearing of 50”). Thus, at all start points the 0” ray was parallel or
568 THORNDYKE AND HAYES-ROTH
perpendicular to the walls of the room. All subjects visited the start points and estimated destination points in the same order.
After visiting the six start points, the subject and experimenter returned to the experi- menter’s office. The experimenter seated the subject at a table with the compass wheel in front of her and told the subject to imagine herself at the first start point. Then, for each of the destination points, the subject again estimated its bearing on the compass wheel. This “simulated orientation” task was repeated for each of the 42 pairs in the same order as on the earlier orientation task. We included this task to control for any potential advantage the navigation subjects might have gained during the orientation task by using local visual cues to refine their orientation estimates. These cues, if used, might not have benefited map- learning subjects due to their unfamiliarity with the Rand buildings.
After completion of the simulated orientation task, the experimenter gave the subject a booklet containing 42 8.5 x 1 l-in. pages. On each page, two labeled dots designated the locations of two of the public areas within Rand (e.g., East Lobby, Common Room). One of the labels was circled, indicating that that location should be considered the start point. The upper left comer of the page contained the name of a destination (e.g., Cashier). These 42 items contained the same start point-destination pairs as the previous tests.
The subject’s task was to place a dot on the page indicating the location of the destination relative to the start point, using the second given point to establish the scale and orientation of this simplified map. For these test items, the two given points appeared in arbitrary locations on the page with the constraints that (1) the scale of the map was the same as the original map studied by map-learning subjects, and (2) the correct location of the destination point was within the boundaries of the page. The subject’s work on this task was self-paced, and unlimited time was provided for completion.
COMPUTATION OF SPATIAL JUDGMENTS
We now consider in detail the procedures subjects use to compute spatial judgments. We presume that subjects retrieve from memory their knowledge of the space to be estimated and compute from this knowledge the required response. Thus, subjects who have learned a map judge spatial relations differently from subjects who have direct navigation ex- perience .
Distance Estimates
A summary of our models of the procedures subjects with the two types of learning experiences used to estimate Euclidean and route distances is presented in Table 1.
Subjects who have learned a map generate and use an image of the map to estimate distances. They measure distances by scanning from the specified start point to the destination point in a manner analogous to the way in which they would scan across an actual map (Thorndyke, 1981b). When estimating a Euclidean distance, subjects perform a single scan and estimate the distance by comparing it to the provided scale distance. Because subjects’ Euclidean estimates do not depend on the route be- tween them, the error in subjects’ estimates of Euclidean distance should be independent of the number of legs on the connecting route.

LEARNING FROM MAPS AND NAVIGATION 569
TABLE 1 Procedures for Distance Estimation
Type of estimate
Type of experience
Map
Euclidean
Visualize map Locate endpoints Measure length Generate response
Navigation Mentally simulate route Estimate leg lengths Estimate turning angles Perform informal algebra Generate response
Route
Visualize map Locate endpoints Measure leg lengths Sum lengths Generate response
Mentally simulate route Estimate leg lengths Sum lengths Generate response
When estimating a route distance, map-learning subjects must estimate and sum the lengths of the component legs on the route to arrive at an overall estimate. The additional processing required to aggregate the component estimates can introduce error into the estimation process. The more component legs to be estimated and combined, the greater the op- portunity for error.’ Thus, on an item-by-item basis, the error in map- learning subjects’ estimates of route distance should exceed the error in their estimates of Euclidean distance.
Subjects with navigation experience estimate the distance between two points by mentally simulating a trip from the start point to the destination. When estimating route distances, they estimate and sum the lengths of the component legs on the route. When estimating Euclidean distances, they must also estimate the angles at which they turn between different legs on the route. They must then perform some mental algebra using the leg and angle estimates to estimate the straight-line distance between the points. For example, to estimate the Euclidean distance to the Los Angeles air- port from Rand, one might reproduce the route from Rand to the airport as
’ In general, we assume that increasing the number of computations required to produce an estimate increases the absolute error in the estimate. Thus, for example, we would predict that the error in a route estimate requiring the summation of three component-leg estimates should exceed the error in an estimate requiring a single measurement in memory. In fact, component errors could cancel each other and result in a more accurate overall estimate than that resulting from the single computation. Thus, such cancellation would result in a judgment that underestimated the error in subjects’ computations. In all cases, however, any underestimate works against our observing the error differences we predict.

570 THORNDYKE AND HAYES-ROTH
START (h, d,, fl)
(%, 4, fn) END
where 0, is the angle in degree of the turn at the beginning of the ith straight-line leg of the trip, di is the distance (in miles) traveled along the leg, and ti is the time (in minutes) required to travel that distance. Typi- cally, the estimate Of di is mediated by the estimate of ti obtained from the simulation. Thus, the route to the airport might be represented as
START c-90, 1, 3) (90, 7, 15) w, .l, .3) (-90, .l, .3) END
This description places the airport 7.1 miles in front of and 0.9 miles to the left of the start point. Using the Pythagorean theorem, one could determine that the Euclidean distance to the airport is thus 7.16 miles. Although we do not believe that subjects actually perform these compu- tations, we do think that subjects use informal, analog equivalents of this computation to produce a judgment. For example, most people, if told that a destination was many miles in front of them and slightly to their left, would estimate its distance at slightly more than the straight-ahead com- ponent distance. Such informal approximations to mathematical compu- tations occur frequently in everyday life.
In the present context, the critical point is our assumption that Euclid- ean distance estimation requires more data and computation than route distance estimation. This additional processing can introduce error into the estimation process. Therefore, we expected that the Euclidean esti- mate for a given item should be less accurate than the route distance estimate.
Two specific predictions about the accuracy of Euclidean estimates follow from the assumption that subjects use the route connecting the endpoints to produce their estimates. Because Euclidean estimates utilize

LEARNING FROM MAPS AND NAVIGATION 571
route-leg estimates and additional computation, increasing the complexity of the computation and number of component estimates should increase the error of the overall estimate. Thus, the error in navigation subjects’ estimates of Euclidean distance should increase as the number of legs on the connecting route increases. Further, the accuracy of subjects’ esti- mates of Euclidean distances should be at least as large as that computed from the subject’s component-leg estimates. That is, the error in the Eu- clidean estimates should be at least as large as that computed from the subjects’ component-leg estimates, the correct turning angles, and error-free algebraic computations using these data.
We also sought a measure of the overall accuracy of subjects’ internal representation of the space in addition to a simple item-by-item measure of absolute accuracy. Consequently, we computed the Pearson correlation between subjects’ estimated distances and the true distance for each type of estimate. This provided a measure of consistency in the accuracy of multiple judgments that was insensitive to absolute errors, thus allowing for a scale factor in each subject’s estimates. The correlation coefficient thus provided a measure of the accuracy of subjects’ cognitive maps rather than a measure of the accuracy of their distance estimates.
We expected that the correlations obtained for navigation subjects should be higher when based on route estimates than on Euclidean esti- mates. When navigation subjects estimate route distances, they simulate traversal of the route as a basis for the distance judgment. The difficulty of computing this estimate changes little as the length and complexity of the route increases. However, Euclidean estimates require computations that become more complex and subject to error as the complexity of the route increases. Therefore, we expected that the correlation between naviga- tion subjects’ true and estimated distances would be higher for route than for Euclidean estimates.
In contrast, we expected that the correlations for map-learning subjects should be equivalent when based on route or Euclidean estimates. For both estimates, subjects measure distances directly on their learned maps. Because route estimation requires multiple measurements, it is slightly more complex than Euclidean estimation. However, this procedural dif- ference is small compared to the different estimation processes of naviga- tion subjects. We therefore expected no significant difference between the configurational accuracy of map-learning subjects’ two types of esti- mates.
As navigation subjects acquire more experience, they induce survey knowledge of the environment. This knowledge can support direct mea- surement of the Euclidean distance between two points without reference to the route connecting them just as map-learning subjects use their imagined maps to measure these distances. Thus, the correlation between

572 THORNDYKE AND HAYES-ROTH
true and estimated Euclidean distances should increase across experience groups and ultimately approximate the accuracy attained by map-learning subjects. In contrast, we postulate no change in the process by which navigation subjects compute their route estimates. Because all navigation subjects were familiar with tested routes, the accuracy of their route estimates should improve relatively little with increasing experience.
Orientation and Object Location Judgments
As in the case of estimating distances, we assume that subjects who have learned a map judge orientation and object location differently from subjects with navigation experience. Our models of these procedures are summarized in Table 2. Subjects who have learned a map generate and use an image of the map to judge orientation and location. To perform location judgments, they align their image of the map and the stimulus containing the two given points, by either rotating their image or the paper containing the stimulus. They then rescale their image to the scale of the stimulus and scan across the image to determine the location of the des- tination point. Finally, they transfer this location to the sheet containing the stimuli. Note, however, that the determination of the orientation of a destination point is independent of the complexity of the route con- necting it to the start point.
To perform orientation judgments, map-learning subjects use a similar procedure that requires one additional step. After determining the posi- tion from the start point to the destination on their image, they must translate this location from a position vertical to themselves into a re- sponse horizontal to themselves. That is, they must translate the perspec- tive from which the response is generated. We assume that this process of perspective translation, an additional process not required in the location task, is difficult and subject to error. Therefore, subjects should judge location more accurately than orientation.
Note, however, that map-learning subjects estimate orientation without reference to the connecting route. Because route complexity should not influence the accuracy of subjects’ estimates, we expected that the error in their orientation judgments should be independent of the number of legs on the connecting route.
Subjects with navigation experience perform orientation and location judgments by mentally simulating a trip between the start and destination points. When performing orientation judgments, they use a procedure similar to that for determining Euclidean distances. These subjects esti- mate the leg lengths and horizontal turning angles along the route and then combine these informally to produce a horizontal response in the same perspective as their memory representation. Because the difficulty of computing a response is a function of the number of legs along the simu-

LEARNING FROM MAPS AND NAVIGATION
TABLE 2
Procedures for Orientation and Object Location Judgments
573
Type of judgment
Type of experience Orientation Location
Map Visualize map Locate self Align map with current
bearing Find destination Determine angle Translate angle into
response plane Generate response
Visualize map Align map with stimulus Rescale map
Find destination Determine angle Generate response
Navigation Mentally simulate route Visualize self at start point Estimate leg lengths Mentally simulate route to
second given point Estimate turning angles (Either A or B below) Perform informal algebra Generate response
A. Route-Jtting B. Orientation method method
Translate route Perform simulated into response orientation plane
Rescale and align Translate into route response plane
Simulate route to Align stimulus destination with current
simulated bearing
Translate route Simulate route to into response destination plane
Generate response Perform simulated orientation
Translate into response plane
Generate response
lated route, the error in subjects’ orientation judgments should increase as the number of legs on the connecting route increases. Further, the accu- racy of navigation subjects’ orientation judgments should be limited by the accuracy of their component-leg estimates. That is, the error in their orientation judgment should be at least as large as that computed from

574 THORNDYKE AND HAYES-ROTH
their component-leg estimates, the correct turning angles, and error-free algebraic computations using these data.
We assume that when estimating the location of a destination point on a sheet containing a start point and a second given point, navigation sub- jects begin by mentally simulating the route from the start point to the second given point. They then proceed using either a route-fitting method or an orientation method, as summarized in Table 2.
Using the route-fitting method, subjects change to a vertical perspec- tive on the simulated route in order to represent it on the sheet containing the stimuli. This requires subjects to rescale the estimated leg lengths and to cognitively, if not physically, align the stimulus sheet with their direc- tion of simulated travel on the route. Subjects then simulate traversal of the route between the start point and destination point and translate their perspective on this route into the response plane given by the stimulus sheet. In making this translation, subjects rescale and align the route as indicated by the first translation process. As with map-learning subjects, we assume that changing perspective on the memory representation in order to produce the appropriate response is difficult and subject to error.
Using the orientation method, subjects first perform a simulated orien- tation judgment from the start point to the second given point. They then change perspective to translate this response to the plane of the response sheet and align the stimulus, wither cognitively or physically, with their current bearing. Having established scale and alignment, subjects then perform a simulated orientation judgment from the start point to the desti- nation point and translate this response to the response plane as before.
Regardless of the type of spatial knowledge navigation subjects use to produce their estimates, they should judge orientation more accurately than object location. The location estimation procedure requires the addi- tional operation of changing perspective on the memory representation to generate the required response. Because this introduces error into the estimate, the orientation estimates should be more accurate.
With extensive experience, navigation subjects develop survey knowl- edge of a space. Such knowledge can support the direct retrieval of object orientations without intermediate computation from route information. This can support both orientation and object location judgments. The simplification of this estimation procedure should increase the accuracy of both types of estimates. Thus, both orientation and location judgments should improve with experience.
We now consider predictions for the relative performance of map- learning and navigation subjects. To point toward a destination lying along a straight line of travel, navigation subjects must simply point in the direction of travel. Map-learning subjects performing this task must align

LEARNING FROM MAPS AND NAVIGATION 575
their mental maps with their current orientation, determine the angle on the map, and then translate that angle into a pointing response. The addi- tional requirements for map alignment and response translation introduce additional sources of error into the estimation process. Thus, navigation subjects should judge orientation more accurately than map-learning subjects for pairs of points with straight connecting routes. As the route complexity between the start and destination point increases, the alge- braic computation that navigation subjects must perform increases. We have no estimate of the relative complexity of such computation vs the alignment and response rotation operations of map-learning subjects. Thus, we cannot predict the relative accuracies of judgments between points lying on complex routes.
In contrast, map-learning subjects should judge object location more accurately than navigation subjects. Map-learning subjects judge location by aligning and resealing their mental maps to correspond to the scale and orientation of the test item. Regardless of the estimation procedure they use, navigation subjects must perform two response rotations to produce an estimate and generate a response. In addition, navigation subjects with minimal experience must compute route lengths and/or orientations to judge locations. Thus, the navigation subjects’ task is more complex than map learners’ task and should produce larger errors.
RESULTS
Distance Estimation
For each subject, we computed the correlations between the true and estimated distances for both types of estimate. These data are presented in Fig. 2. (Across subjects, the absolute error in estimates increased with true distance. Because route distances were longer than Euclidean dis- tances, this presented the possibility that route distance correlations may have been artifactually depressed relative to Euclidean distance correla- tions. Correlations computed on resealed distances that eliminated this artifact, however, did not alter the pattern or reliability of results.)
For map-learning subjects, neither the route nor Euclidean correlations varied across experience groups. Therefore, in Fig. 2 the data for the three map-learning groups are combined and displayed as a mean value. The bars for each point indicate the range of the mean correlations for the three map-learning subject groups.
As expected, map-learning subjects’ correlations were virtually identi- cal for Euclidean and route distance estimates (.82). For exactly half of the 24 subjects, the correlation between true and estimated distances was higher for route than for Euclidean judgments. For the other half, the reverse ordering held. For 14 of the 24, the difference between correla-
576 rHORNDYKE AND HAYES-ROTH
I I I I
Map l-Zmo 6-12 mo 12-24 ma \ v /
Navigation
Type of experience
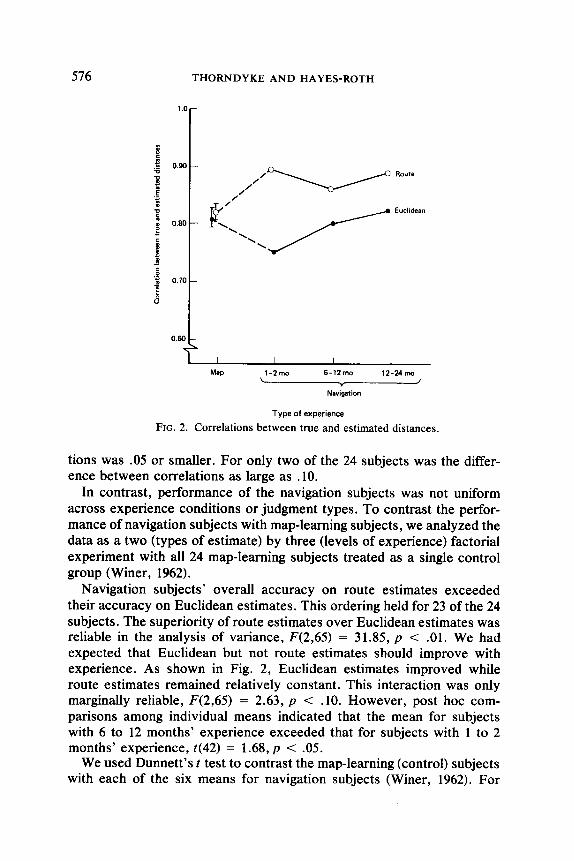
FIG. 2. Correlations between true and estimated distances.
tions was .05 or smaller. For only two of the 24 subjects was the differ- ence between correlations as large as .lO.
In contrast, performance of the navigation subjects was not uniform across experience conditions or judgment types. To contrast the perfor- mance of navigation subjects with map-learning subjects, we analyzed the data as a two (types of estimate) by three (levels of experience) factorial experiment with all 24 map-learning subjects treated as a single control group (Winer, 1962).
Navigation subjects’ overall accuracy on route estimates exceeded their accuracy on Euclidean estimates. This ordering held for 23 of the 24 subjects. The superiority of route estimates over Euclidean estimates was reliable in the analysis of variance, F(2,65) = 31.85, p < .Ol. We had expected that Euclidean but not route estimates should improve with experience. As shown in Fig. 2, Euclidean estimates improved while route estimates remained relatively constant. This interaction was only marginally reliable, F(2,65) = 2.63, p < .lO. However, post hoc com- parisons among individual means indicated that the mean for subjects with 6 to 12 months’ experience exceeded that for subjects with 1 to 2 months’ experience, ~(42) = 1.68, p < .05.
We used Dunnett’s f test to contrast the map-learning (control) subjects with each of the six means for navigation subjects (Winer, 1962). For

LEARNING FROM MAPS AND NAVIGATION 577
Euclidean estimates, map-learning subjects were more accurate than the least experienced navigation subjects (p < .05) but no more accurate than more experienced subjects. Thus, increasing navigation experience ap- pears to support acquisition of survey relations as accurate as those en- coded directly from a map. In addition, all navigation subjects were more accurate on route estimates than map-learning subjects (p < .05 for each comparison).
We next contrasted the absolute errors on subjects’ individual route and Euclidean estimates, as shown in Table 3. While the absolute error in estimates was correlated with true distance for most subjects, the percent error was not. In Table 3, therefore, estimation errors are presented as percentages of true distances.
Map-learning subjects had larger errors for route estimates than for Euclidean estimates. This relationship held for 17 of the 24 subjects (p < .05 by a one-tailed sign test). In contrast, 19 of the 24 navigation subjects made larger errors when estimating Euclidean distances than when esti- mating route distances (p < .Ol). These data strongly support our as- sumption that increasing the number of mental measurements and the complexity of computation required to produce an estimate increases the error of the estimate.
Because we have assumed that increasing navigation experience leads to the acquisition of survey knowledge, we expected that experienced navigation subjects should behave like map-learning subjects. Thus, with increasing experience, navigation subjects’ Euclidean estimates should become more accurate relative to their route estimates. The data con- firmed this expectation. Of the 19 navigation subjects with larger Euclid- ean than route estimation errors, 8 out of 8 were from the 1 to 2 month experience group (p < .Ol), 7 out of 8 were from the 6 to 12 month group, and 4 out of 8 were from the 12 to 24 month group.
We next tested the prediction that the accuracy of navigation subjects’ Euclidean estimates should be limited by the accuracy of their route-leg
TABLE 3 Percent Error for Euclidean and Route Distance Estimates
Type of experience
Type of estimate
Euclidean Route Subjects
confirming prediction (%)
Map 32.8 35.8 70.8* Navigation 32.3 26.2 79.2**
*p < .05. **p < .Ol.
578 THORNDYKE AND HAYES-ROTH
TABLE 4 Percent Difference between Error in Euclidean Distance Estimates and Error Computed
from Route-Leg Estimates
Type of experience
Map Navigation
*p < .os.
Percent Subjects error difference confirming prediction (%)
-11.4 58.3 0.6 75.0*
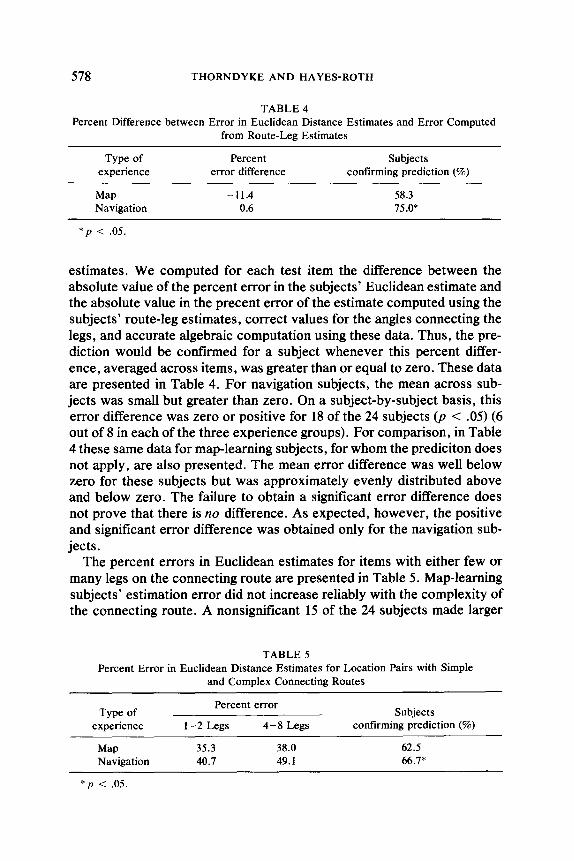
estimates. We computed for each test item the difference between the absolute value of the percent error in the subjects’ Euclidean estimate and the absolute value in the precent error of the estimate computed using the subjects’ route-leg estimates, correct values for the angles connecting the legs, and accurate algebraic computation using these data. Thus, the pre- diction would be confirmed for a subject whenever this percent differ- ence, averaged across items, was greater than or equal to zero. These data are presented in Table 4. For navigation subjects, the mean across sub- jects was small but greater than zero. On a subject-by-subject basis, this error difference was zero or positive for 18 of the 24 subjects (p < .05) (6 out of 8 in each of the three experience groups). For comparison, in Table 4 these same data for map-learning subjects, for whom the prediciton does not apply, are also presented. The mean error difference was well below zero for these subjects but was approximately evenly distributed above and below zero. The failure to obtain a significant error difference does not prove that there is 110 difference. As expected, however, the positive and significant error difference was obtained only for the navigation sub- jects.
The percent errors in Euclidean estimates for items with either few or many legs on the connecting route are presented in Table 5. Map-learning subjects’ estimation error did not increase reliably with the complexity of the connecting route. A nonsignificant 15 of the 24 subjects made larger
TABLE 5 Percent Error in Euclidean Distance Estimates for Location Pairs with Simple
and Complex Connecting Routes
Type of experience
Percent error
l-2 Legs 4-8 Legs Subjects
confirming prediction (%)
Map Navigation
35.3 38.0 62.5 40.7 49.1 66.7*
*p < .05.

LEARNING FROM MAPS AND NAVIGATION 579
errors when estimating distances with complex connecting routes. Again, while this failure to obtain a significant difference does not prove that no difference exists, it does provide weak support for our expectation that map-learning subjects’ estimates should not depend on route complexity. In contrast, the difference between the errors on these two types of items for navigation subjects was larger and held for a significant 16 of the 24 subjects, as expected. Consistent with the assumption that increased navigation results in an increasing use of survey knowledge to arrive at these estimates, we observed that the number of subjects with larger errors on the complex routes decreased with increasing navigation expe- rience (7 out of 8 subjects in the 1 to 2 month group, 5 out of 8 in the 6 to 12 month group, and 4 out of 8 in the 12 to 24 month group).
To summarize, our results indicate that map-learning subjects make more errors when estimating route distances than when estimating Euclid- ean distances. However, the accuracy of the relationships among loca- tions as inferred from correlations is equivalent when estimated either from Euclidean or route distances. Further, map learners’ cognitive maps do not improve with extensive exposure to the map displaying the spatial relationships. Navigation subjects estimate distances and construct cog- nitive maps from these distances more accurately when considering routes rather than Euclidean relations. With additional navigation experi- ence, the differences between route and Euclidean knowledge diminish. Further, subjects with 6 to 12 months of experience performed as well on Euclidean estimates and better on route estimates than map-learning subjects.
Orientation and Location
We tested the predictions for the orientation task using the data shown in Fig. 3, which contrasts the mean angular error between the true and estimated orientation of distant points for map-learning and navigation subjects. Navigation subjects estimated orientations more accurately than map-learning subjects for items with straight-line connecting routes and for items with more complex connecting routes. Therefore, the data in Fig. 3 comprise estimates for all 42 start point-destination pairs. The data from both the orientation task and the simulated orientation task are also displayed in Fig. 3.
For map-learning subjects, neither orientation nor simulated orientation judgments varied across experience groups. Therefore, in Fig. 3 the data for the three map-learning groups are combined and displayed as for the distance estimation data.
Navigation subjects improved with experience on both tasks (F(2,42) = 6.86, p < .Ol for the interaction between type and amount of learning experience). Individual comparisons showed that subjects with 12 to 24

580 THORNDYKE AND HAYES-ROTH
Simulated orientation
Orientation
Ma!2 I-2mo 6-12 mo 12-24 mo
. Navigation
Type of experience
FIG. 3. Angular error on the orientation tasks.
months’ experience judged orientation more accurately than subjects in the other two experience groups, and they judged simulated orientation more accurately than the least experienced group (t(42) > 1.68,~ < .05 for all three comparisons).
Navigation subjects were far more accurate than map-learning subjects on both orientation tasks (F( 1,42) = 16.54, p < .OOl). Performance of all subjects was more accurate on the orientation task than on the simulated orientation task, F(1,42) = 9.06, p < .Ol. This difference presumably reflects the additional requirement in the simulated orientation task of imagining oneself in the specified position at the start point. We had included the simulated orientation task to test for an artifactual advantage that navigation subjects might have on the orientation task due to famil- iarity of local visual features. Such an artifact, if present, should have resulted in a larger between-group difference on the orientation task than on the simulated orientation task. As shown in Fig. 3, however, the oppo- site result held. The mean advantage of navigation subjects over map- learning subjects was 23” for the simulated orientation task and 15” for the real orientation task. Because the patterns of performance and between- group differences on the two tasks were quite similar, subsequent analyses considered only the true orientation task.

LEARNING FROM MAPS AND NAVIGATION 581
The results for the location task are shown in Fig. 4. We scored sub- jects’ responses both for the distance from the true location on the judged location of the destination point on the response sheet (measured in mil- limeters) and as the angular error in the placement of the destination point relative to the two given points. The two dependent measures produced a similar pattern of results. Therefore, to maintain consistency in the units of measurement, we have used angular error as the ordinate value in Fig. 4.
As for the other tasks, the performance of map-learning subjects did not change with additional experience. Navigation subjects, however, did improve with experience (F(2,42) = 4.81, p < .05 for the interaction between type and amount of experience). Overall, map-learning subjects were more accurate than navigation subjects, F( 1,42) = 11.10, p < .Ol. However, the accuracy of the most experienced navigation subjects did not differ reliably from that of the map-learning subjects (p > .05).
The use of angular error as a dependent variable treats individual items independently. To obtain a more aggregated measure of subjects’ cogni- tive maps derived from orientation and location judgments, we recon- structed subjects’ cognitive maps of the various locations using combina- tions of estimates for each location. For example, on the orientation task, each subject pointed toward the East Lobby from six different locations. By imposing a Cartesian xy coordinate system on the space, we charac- terized each of these estimates as a line passing through the start point (xi ,yJ at an angle of cr (the estimated orientation). Using the least-squares method, we determined the point in space closest to all six lines and used the coordinates of that point as the best estimate of the location of the destination point in the subject’s cognitive map. We then derived two
407
i $ 30- 9
; 0
5 a 20- 2
10 -
1 I I I I
MW 1-Zmo 6-12mo 12-24 mo
Type of experience
FIG. 4. Angular error on the object location task,

582 THORNDYKE AND HAYES-ROTH
measures from this point estimate: the accuracy of the point (defined as the Euclidean distance to the coordinates of the true location) and the consistency of the estimate (defined as the standard error of the estimate obtained from the least-squares method).
The accuracy and consistency data so derived for map-learning and navigation subjects are displayed in Fig. 5. The ordinate represents the distance in feet from the true point location from the estimated location, averaged across locations and subjects. The bars around each point indi- cate the mean consistency, or standard error, of each estimate. The re- sults are consonant with the data in Figs. 3 and 4. Performance among map-learning subjects did not vary with experience. For the orientation task, navigation subjects were more accurate than map-learning subjects (F(2,42) = 9.66,~ < .Ol) and improved with experience (F(2,42) = 6.84,~ < .Ol). Further, the consistency in their estimates improved (i.e., the standard error decreased) with additional experience. For the location task, map-learning subjects were more accurate than navigation subjects (F(1,42) = 10.21, p < .Ol), but navigation subjects improved with experi- ence (F(2,42) = 4.27, p < .05).
Table 6 contrasts subjects’ performance on the orientation and location tasks directly. As expected, navigation subjects judged orientation more accurately than object location. This prediction held for 16 of the 24
SOJ-
; E - 250 - 6 ‘Z
8 Q 5 zoo-
8
‘C ; 150 -
3 .E B
E lOO-
* D
5 g 50
Orientation
Location
Map 1.2mo 6-12mo 12-24 mo L I Y
Navbgation
Type of experience
FIG. 5. Accuracy of subjects’ cognitive maps as derived using least-squares method.
LEARNING FROM MAPS AND NAVIGATION 583
TABLE 6 Angular Error for Orientation and Location Judgments
Type of experience
Angular error
Orientation Location Subjects
confirming prediction (%)
Map Navigation
*p < .Ol. **p < .05.
39.3 16.9 95.8* 22.1 24.9 66.7**
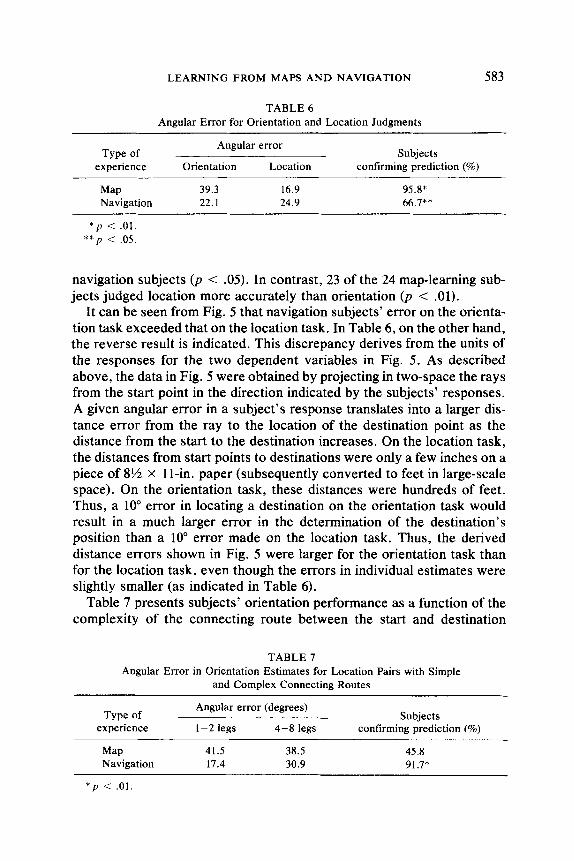
navigation subjects (p < .05). In contrast, 23 of the 24 map-learning sub- jects judged location more accurately than orientation (p < .Ol).
It can be seen from Fig. 5 that navigation subjects’ error on the orienta- tion task exceeded that on the location task. In Table 6, on the other hand, the reverse result is indicated. This discrepancy derives from the units of the responses for the two dependent variables in Fig. 5. As described above, the data in Fig. 5 were obtained by projecting in two-space the rays from the start point in the direction indicated by the subjects’ responses. A given angular error in a subject’s response translates into a larger dis- tance error from the ray to the location of the destination point as the distance from the start to the destination increases. On the location task, the distances from start points to destinations were only a few inches on a piece of 8% x 1 l-in. paper (subsequently converted to feet in large-scale space). On the orientation task, these distances were hundreds of feet. Thus, a 10” error in locating a destination on the orientation task would result in a much larger error in the determination of the destination’s position than a lo” error made on the location task. Thus, the derived distance errors shown in Fig. 5 were larger for the orientation task than for the location task, even though the errors in individual estimates were slightly smaller (as indicated in Table 6).
Table 7 presents subjects’ orientation performance as a function of the complexity of the connecting route between the start and destination
TABLE 7 Angular Error in Orientation Estimates for Location Pairs with Simple
and Complex Connecting Routes
Type of experience
Angular error (degrees)
1-2 legs 4-8 legs Subjects
confirming prediction (%)
Map 41.5 38.5 45.8 Navigation 17.4 30.9 91.7*
*p < .01.

584 THORNDYKE AND HAYES-ROTH
points. Because only navigation subjects compute orientations with refer- ence to routes, we predicted that increasing route complexity would in- crease orientation error only for these subjects. As shown in Table 7, navigation subjects were much more accurate in their orientation judg- ments between points on routes with one or two component legs than on routes with between four and eight component legs. This result held for 22 of the 24 subjects. Both subjects for which the prediction did not hold were in the most experienced navigation group. This result is consonant with the expectation that extensive navigation can support judgments based on survey knowledge. The performance of map-learning subjects did not vary systematically with route complexity. The result predicted for navigation subjects held for only 13 of the 24 map-learning subjects.
Finally, we tested the prediction that the accuracy of navigation sub- jects’ orientation judgments should be limited by the accuracy of their route-leg estimates. We computed for each test item the difference be- tween the absolute value of the angular error in a subject’s orientation estimate and the absolute value in the error of the estimate computed using the subject’s route-leg estimates, correct values for the angles con- necting the legs, and accurate algebraic computation using these data. Thus, the prediction would be confirmed for a subject whenever this mean difference was greater than or equal to zero. Across all navigation sub- jects, this mean difference was 20.7”. On a subject-by-subject basis, this error difference was greater than or equal to zero for 21 of the 24 subjects (p < .Ol). This result, however, is qualified by the fact that 22 of the map-learning subjects also showed this difference. We had no a priori reason to expect this result for map-learning subjects.
To summarize, map-learning subjects made more errors when judging orientation than when estimating object locations. This result derived from the additional change in perspective required of map-learning sub- jects when judging orientation. Neither of these judgments improved with overlearning of the map on which the judgments were based. Navigation subjects judged orientation more accurately than they judged object loca- tions, which required perspective changes during judgment process. With additional navigation experience, performance on both tasks improved. Navigation subjects with minimal experience judged orientation more ac- curately than map-learning subjects. While map-learning subjects in gen- eral judged object locations more accurately than navigation subjects, navigation subjects with extensive experience performed as well as sub- jects who had learned the map.
DISCUSSION
Taken together, the data from this experiment provide a fairly consis- tent picture of the differences in the knowledge people acquire from maps

LEARNING FROM MAPS AND NAVIGATION 585
and navigation. Map learners acquire a bird’s eye view of the environment that encodes survey knowledge sufficient to support performance on a variety of estimation tasks. The obvious advantage of acquiring knowl- edge from a map is the relative ease with which the global relationships can be perceived and learned. When using this knowledge to perform spatial judgments, individuals have direct access to the knowledge re- quired to estimate distances and judge object locations. They are most error prone when required to change perspective on the representation and translate their knowledge into a response within the environment, as on the orientation task. It is perhaps unintuitive that people who have memorized a map should have difficulty simply changing their perspective to support accurate orientation judgments. A common instance of this difficulty arises in another context, however: drawing a route map.using only navigation experience. People living in environments with irregular street topography often have difficulty drawing maps of their local street network that satisfy internal, local constraints of street direction and in- tersection. This difficulty persists even when they have vivid and accurate memories of the routes they are attempting to reproduce. In this example, the required perspective change translates procedural knowledge to sur- vey knowledge. Nevertheless, it illustrates the difficulty of perspective change experienced by many people who attempt to draw a map of the route to their house.
Through navigation, people acquire memories of traversed routes. When individuals use only this knowledge to perform spatial judgments, performance is limited by the necessity to derive judgments through com- putation on pieces of this knowledge (as when estimating orientation, object location, or Euclidean distances). Further, performance declines when perspective changes are required to generate a response, as in the location task. The fact that subjects with navigation experience performed better on the orientation task than map-learning subjects suggests that the difficulty of changing perspective overwhelms the difficulty of computing direct judgments from circuitous route experiences. Despite the necessity to compute the orientation of a destination from knowledge only of an indirect route to the destination, navigation subjects were more accurate than map-learning subjects, who had to rotate the response plane of a directly measured angle.
The improvement in performance across experience groups on the Euclidean distance estimation, orientation, and location tasks suggests that extensive navigation can lead to qualitative changes in the knowledge of the environment. One might argue that additional experience merely improved memory for the traversed routes in the environment. Across- experience estimates of route distance, however, remained constant while estimates of Euclidean distance among the same points improved. This

586 THORNDYKE AND HAYES-ROTH
supports our model of people’s ability to organize procedural knowledge into a form of survey knowledge in which the environment is “translu- cent.” People with extensive navigation experience can in some sense “look through” opaque obstacles in the environment to their destination without reference to the connecting route. While we do not believe that this process is actually visual in nature, it illustrates the idea of survey knowledge from a perspective within, rather than above, the represented environment.
This model of the reorganization of procedural knowledge to survey knowledge has several implications that we have not tested. In particular, subjects who can directly access the location of a destination in such a representation should be faster at judging orientation than subjects who must simulate route traversal and compute an estimate based on this simulation. In general, reaction time studies offer a promising paradigm in which to test several of our predictions for differential complexity in the processes required to produce spatial judgments.
Acquiring survey knowledge solely through navigation entails both costs and benefits. Our data indicate that the principal advantage of such learning is the ultimate superiority of the acquired cognitive map. On the distance estimation tasks, highly experienced navigation subjects were superior in route estimation and equivalent in Euclidean estimation to map-learning subjects. Similarly, these navigation subjects were superior on orientation judgments and equivalent on object location judgments to map-learning subjects. While in the limit, the knowledge acquired from navigation may be more extensive than that acquired through map learn- ing, it is obviously more difficult to obtain. Our highly experienced sub- jects had between 1 and 2 years of route traversals from which to derive their spatial knowledge. In contrast, the map subjects required approxi- mately 20 min to learn the map. In situations in which it is desirable to acquire accurate spatial knowledge, it may not be practical or possible to travel in the environment repeatedly to learn it.
One factor that may significantly influence the relative utility of map- learning and navigation experience is the regularity of the environment. In extremely regular environments with rectangular street grids (e.g., Man- hattan), navigation may rapidly lead to accurate survey knowledge. In extremely irregular environments, such as Boston, accurate survey knowledge develops much more slowly when based solely on navigation. The environment used in the present experiment was intermediate be- tween these two extremes. Within a building, hallways met at right angles. The two buildings, however, were separated by an obtuse angle that made between-building judgments difficult. Indeed, we observed that naviga- tion subjects were significantly more accurate on within-building esti- mates of orientation and Euclidean distance than on between-building

LEARNING FROM MAPS AND NAVIGATION 587
estimates. In general, we would expect the differences between map- learning subjects and navigation subjects with different amounts of expe- rience to vary as the regularity of the environment changed.
Another potential source of variation in performance that we have not addressed here is individual differences in skills and strategies for spatial knowledge acquisition. In other studies in our laboratory, we have noted large differences in people’s skill at learning from both maps and naviga- tion (Goldin & Thorndyke, 1981; Thorndyke & Stasz, 1980). These differ- ences are predictable from people’s visual memory ability and field de- pendence (spatial restructuring ability). In general, subjects high in these abilities acquire an accurate representation of an environment from either a map or from navigation faster than low ability subjects. In our study, subjects’ abilities may have influenced the amount of experience they required to develop survey knowledge from their navigation experiences.
One of the shortcomings of the spatial performance models we have proposed is that we have intimately linked our assumptions about repre- sentation and process. Our model of the knowledge people acquire led to natural assumptions about the procedures they use to compute estimates using that knowledge. The combination of assumptions about knowledge and procedures constrained our predictions for subjects’ performance. We did not independently assess the tractability of the two sets of as- sumptions, however. It is possible, for example, that other assumptions about the procedures that subjects use to compute estimates would lead to the same predictions for performance. Strictly speaking, by obtaining data consistent with our predictions, we have only failed to reject our model rather than confirm it. We made our model extremely vulnerable, how- ever, by testing a large number of predictions, all of which were at least weakly supported. Thus, we feel that we have taken a first step toward a detailed specification of the methods people use to reason about large- scale space.
REFERENCES
Acredelo, L., Pick, H. & Olsen, M. Environmental differentiation and familiarity as deter- minants of children’s memory for spatial location. Developmental Psychology, 1975, 11,495-501.
Allen, G. W., Siegel, A. W., & Rosinski, R. R. The role of perceptual context in structuring spatial knowledge. Journal of Experimental Psychology, 1978, 4, 617-630.
Anderson, J. R. Arguments concerning representations for mental imagery. Psychological Review, 1978, 85, 249-277.
Appleyard, D. Why buildings are known. Environmental and Behavior, 1969, 1, 131- 156. Appleyard, D. Styles and methods of structuring a city. Environment and Behavior, 1970,2,
loo- 118. Bartram, D. J. Comprehending spatial information: The relative efficiency of different
588 THORNDYKE AND HAYES-ROTH
methods of presenting information about bus routes. Journal of Applied Psychology, 1980, 65, 103- 110.
Canter, D. The psychology of place. New York: St. Martin’s Press, 1977. Downs, R. M., & Stea, D. (Eds.). Images and environment: Cognitive mapping and spatial
behavior. Chicago: Aldine, 1973. Downs, R. M., & Stea, D. Maps in minds. New York: Harper & Row, 1977. Evans, G. W. Environmental cognition. Psychological Bulletin, 1980, 88, 259-287. Goldin, S., & Thomdyke, P. Spatial learning and reasoning skill. Santa Monica, CA: The
Rand Corporation, R-2805-ARMY, 1981. Golledge, R., & Rushton, G. (Eds). Spatial choice and spatial behavior. Columbus: Ohio
State Univ. Press, 1976. Golledge, R., & Zannaras, G. Cognitive approaches to the analysis of human spatial be-
havior. In W. Ittleson (Ed.), Environment and cognition. New York: Academic Press, 1973.
Hardwick, D., McIntyre, C., & Pick, H. The content and manipulation of cognitive maps in children and adults. Monographs of the Society for Research in Child Development. 1976, 41, Whole No. 166.
Hart, R. A., & Moore, G. T. The development of spatial cognition: A review. In R. M. Downs & D. Stea (Eds.), Images and environment: Cognitive mapping and spatial behavior. Chicago: Aldine, 1973.
Hayes-Roth, F. Distinguishing theories of representation: A critique of Anderson’s “Argu- ments concerning mental imagery.” Psychological Review, 1979, 86, 376-382.
Herman, J. F., & Siegel, A. W. The development of spatial representations of large-scale environments. University of Pittsburgh: Learning Research and Development Center, 1977.
Kosslyn, S. M., Ball, T. M., & Reiser, B. J. Visual images preserve metric spatial informa- tion: Evidence from studies of image scanning. Journal of Experimental Psychology: Human Perception and Performance, 1978, 4, 47-60.
Kozlowski, L., & Bryant, K. Sense of direction, spatial orientation, and cognitive maps. Journal of Experimental Psychology, 1977, 3, 590-598.
Kuipers, B. Modeling spatial knowledge. Cognitive Science, 1978, 2, 129- 153. Ladd, F. Black youths view of their environment: Neighborhood maps. Environment and
Behavior, 1970, 2, 64-79. Lord, F. A study of spatial orientation in children. Journal of Educational Research, 1941,
34,481-505. Milgram, S., & Jodelet, D. Psychological map of Paris. In H. M. Proschansky, W. H.
Ittelson, & L. G. Rivlin (Eds), Environmental Psychology. New York: Holt, Rinehart & Winston, 1976. 2nd ed.
Moore, G., & Golledge, R. Environmental knowing. Stroudsburg, PA: Dowden, Hutchin- son, & Ross, 1976.
Piaget J. & Inhelder, B. The child’s conception of space. New York: Norton, 1967. Piaget, J., Inhelder, B., & Szeminska, A. The child’s conception of geometry. New York:
Basic Books, 1960. Shemyakin, F. N. Orientation in space. In B. G. Ananyev et al. (Eds.), Psychological
science in the USSR. Washington, D.C.: U.S. Office of Technical Reports (NO. 11466), 1962. Vol. 1, Pt. 1.
Siegel, A. W., Kirasic, K. C., & Kail, R. V. Stalking the elusive cognitive map: The devel- opment of children’s representations of geographic space. In J. F. Wohlwill Jt I. Altman (Eds.), Human behavior and environment: Children and the environment. New York: Plenum, 1978. Vol. 3.
Siegel, A. W., & White, S. H. The development of spatial representation of large-scale

LEARNING FROM MAPS AND NAVIGATION 589
environments. In H. W. Reese (Ed.), Advances in child development and behavior. New York: Academic Press, 1975.
Stevens, A., & Coupe, P. Distortions in judged spatial relations. Cognitive Psychology, 1978, 10, 422-437.
Thomdyke, P. Performance models for spatial and locational cognition. Santa Monica, CA: The Rand Corporation, R-2676-ONR, 1980.
Thorndyke, P. Spatial cognition and reasoning. In J. Harvey (Ed.), Cognition. social be- havior, and the environment. Hillsdale, NJ: Erlbaum, 1981 (a),
Thorndyke, P. Distance estimation from cognitive maps. Cognitive Psychology, 1981, 13, 526-550. (b)
Thorndyke, P. & Stasz, C. Individual differences in procedures for knowledge acquisition from maps. Cognitive Psychology, 1980, 12, 137- 175.
Wetherell, A. Short-term memory for verbal and graphic route information. Proceedings of the Human Factors Society - 23rd Annual Meeting, Santa Monica, CA: The Human Factors Society, 1979.
Winer, B. Statistical principles in experimental design. New York: McGraw-Hill, 1962.
REFERENCE NOTE 1. Thorndyke, P., & Hayes-Roth, B. Spatial knowledge acquisition from maps and navi-
gation. Paper presented at Psychonomics Society Meetings, San Antonio, TX, 1978.