Separating Axis Test (SAT) and Support Points in 2D
Randy Gaul
Special thanks to Dirk Gregorius for his GDC 2013 lecture and slides

Overview - Separating Axis Test (SAT)
• Why use SAT
• Theory
• Implementation
• Support Points
• Implementation
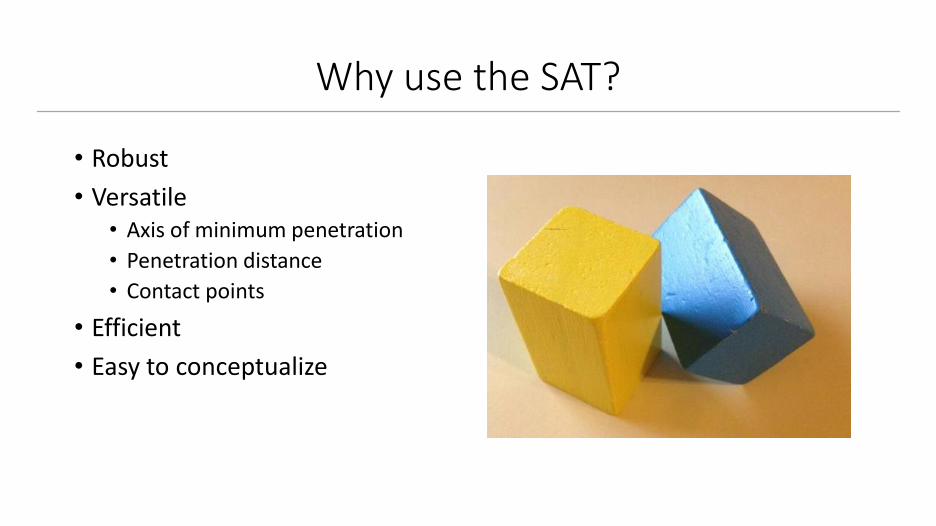
Why use the SAT?
• Robust
• Versatile• Axis of minimum penetration
• Penetration distance
• Contact points
• Efficient
• Easy to conceptualize
SAT Versatility
• Collision detection is easy
• Resolving collision is hard• Realistic bouncing, stacking
• Resolution requires:• Axis of minimum penetration
• Penetration distance
• Contact points
• SAT can give us all info needed for resolution• Gathering this information is called “manifold generation”
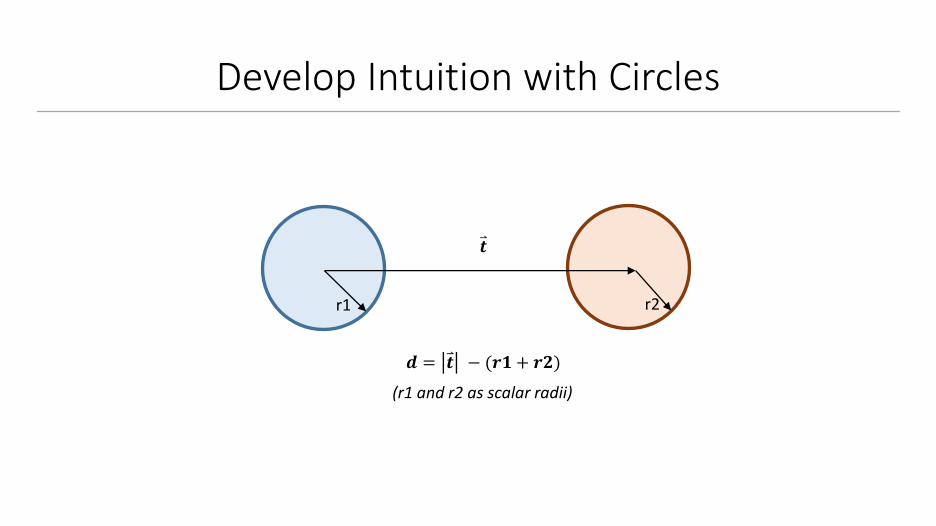
Develop Intuition with Circles
𝒅 = 𝒕 − (𝒓𝟏 + 𝒓𝟐)
𝒕
r1 r2
(r1 and r2 as scalar radii)

Develop Intuition with Circles
𝒕
r1
r2
• Collision when d is positive
• No collision when d is negative
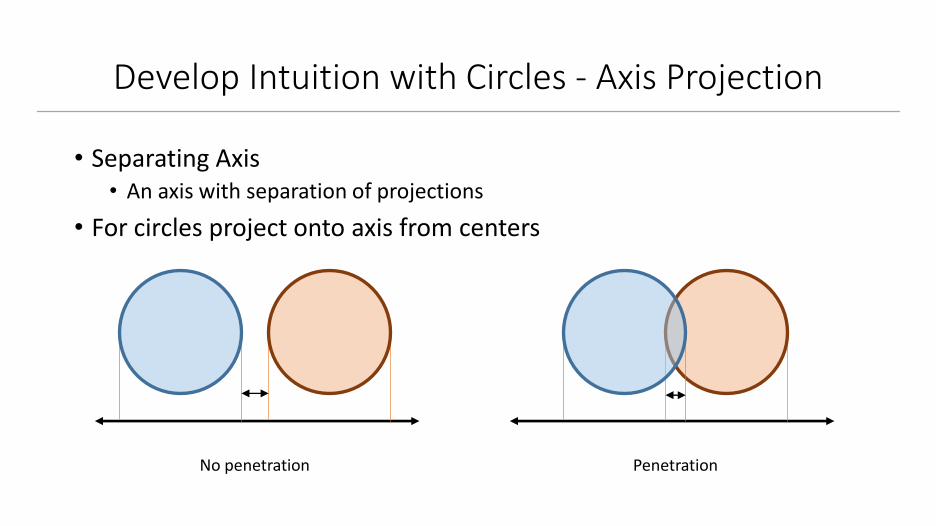
Develop Intuition with Circles - Axis Projection
• Separating Axis• An axis with separation of projections
• For circles project onto axis from centers
No penetration Penetration

SAT - Definition
• Collision• Projections onto all axes are not separating (overlapping)
• No collision• At least one axis contains separating projections
• Note about No Collision case:• Any positive number of axes can be separating
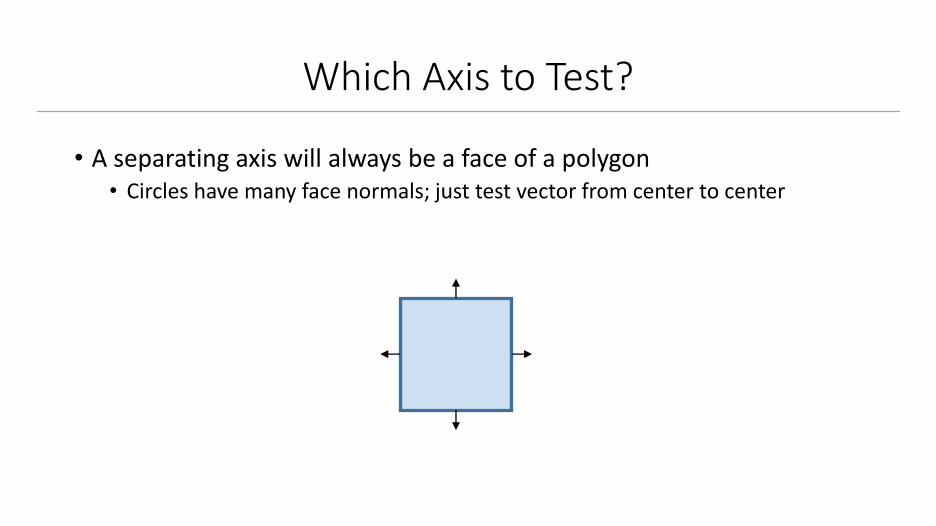
Which Axis to Test?
• A separating axis will always be a face of a polygon• Circles have many face normals; just test vector from center to center
SAT Algorithm
• Given two shapes A and B
• Project A onto face axes of B• Record each signed projection overlap
• Project B onto face axes of A• Record each signed projection overlap
• Return greatest signed distance found
• Collision if distance is less than zero

SAT Implementation (Pseudo Code)
float FindLeastPenetration( Polygon A, Polygon B )
{
float bestDistance = -FLT_MAX;
for(int i = 0; i < A->faceCount; ++i)
Vec2 p = A->faces[i];
float d = Project( A, B, p );
// Store greatest distance
if(d > bestDistance)
bestDistance = d;
return bestDistance;
}
Call twice, flip objects A and B

SAT Implementation : Note
• The largest signed distance will be penetration depth• If less than zero then colliding
• Keep track of face index that supplied penetration depth• This face’s normal will be resolution vector
• This face is the axis of minimum penetration
// Store greatest distance
if(d > bestDistance)
bestDistance = d;
bestIndex = i;
return bestDistance AND bestIndex;

SAT : Optimization
• Projection is expensive• Must transform vertices of both shapes and compute overlap
• Computing support points is faster• Instead of overlap, compute point to line distance
• Support points act as alternative to actual projections
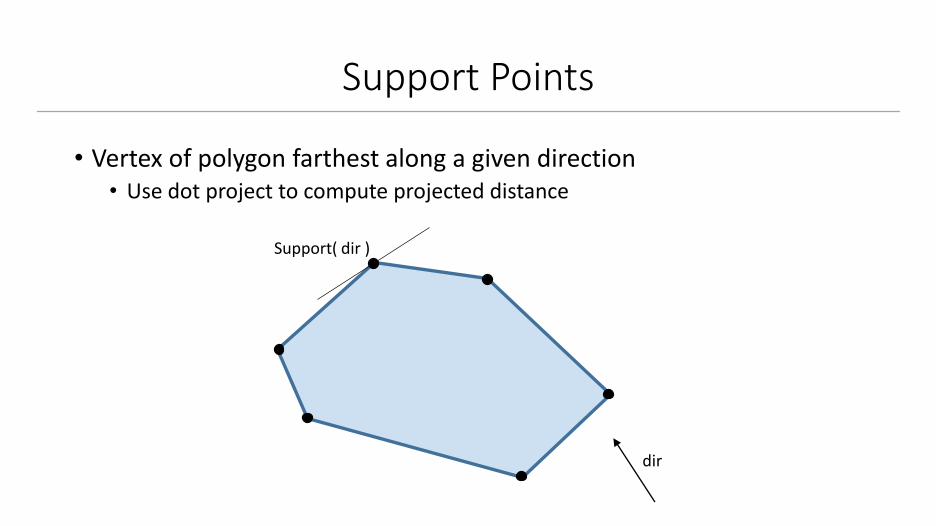
Support Points
• Vertex of polygon farthest along a given direction• Use dot project to compute projected distance
dir
Support( dir )

Support Points Implementation (Pseudo Code)
Vec2 Polygon::GetSupport( const Vec2& dir )
{
float bestProjection = -FLT_MAX;
Vec2 bestVertex;
for(int i = 0; i < vertexCount; ++i)
Vec2 v = vertices[i];
real projection = Dot( v, dir );
if(projection > bestProjection)
bestVertex = v;
bestProjection = projection;
return bestVertex;
}

Optimized Penetration Calculation
Distance point to plane:d = n ∙ (p1 – p2)
p2 : any point along the plane
p1 p2n
Support( -n )
p
n
d = n ∙ (Support( -n ) – p)

SAT Collision Test
bool SAT( Polygon A, Polygon B )
{
if(FindLeastPenetration( A, B ) > 0.0f)
return false;
if(FindLeastPenetration( B, A ) > 0.0f)
return false;
return true;
}

Finding Contact Points
• Point of contact required for resolution• At most, two points can be used
A B
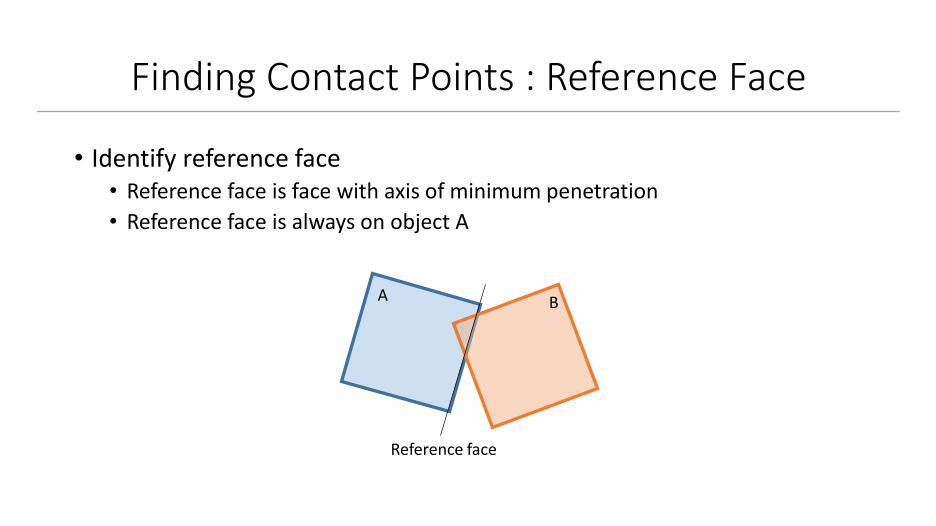
Finding Contact Points : Reference Face
• Identify reference face• Reference face is face with axis of minimum penetration
• Reference face is always on object A
A B
Reference face
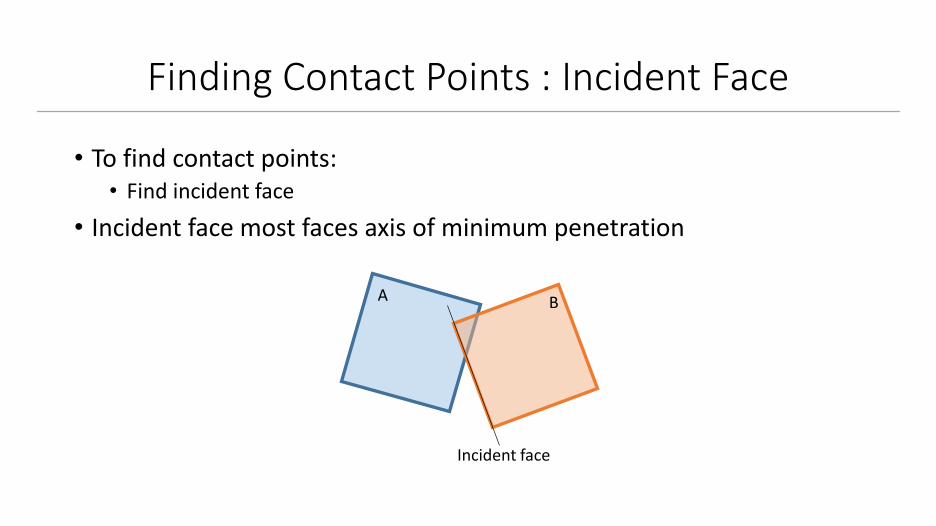
Finding Contact Points : Incident Face
• To find contact points:• Find incident face
• Incident face most faces axis of minimum penetration
Incident face
A B
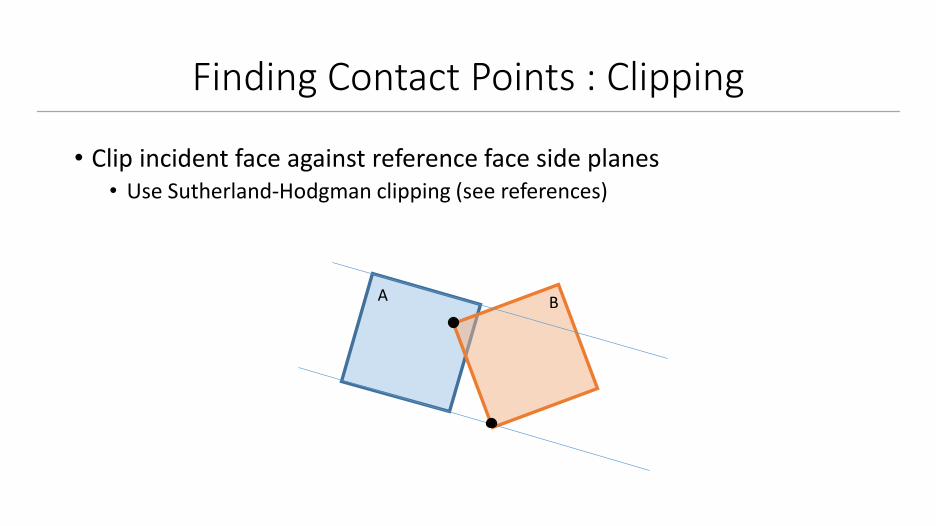
Finding Contact Points : Clipping
• Clip incident face against reference face side planes• Use Sutherland-Hodgman clipping (see references)
A B

Finding Contact Points : Culling
• Only keep points behind reference face• Compute signed distance, test sign (positive or negative)
A B
Checkpoint
• Can detect collisions with SAT
• Understand support points• Can optimize SAT with support points
• Record axis of minimum penetration• Normal to this axis is resolution vector
• Compute contact points with clipping

Optimizations
• If separating axis is found• Store this axis, check axis next frame between same two objects
• Fast early out
• Can detect if face normals are nearly parallel• Testing parallel axes is redundant, don’t do it!
• Can cull redundant axes from both shapes, not just one
• Hill climbing for Support search• Test first vertex and both adjecent
• Loop in direction with greatest delta
• Stop searching once delta is positive

References
• Dirk Gregorius’s 2013 GDC Slides – Box2D.org downloads
• Box2D source code
• Patrick Moghames – Graphics professor (Sutherland-Hodgmanclipping)
• Impulse Engine – randygaul.net
• All of Erin Catto’s GDC Slides – Box2D.org





