e ngineering d esign l ab ii engr-102 w eek 2 l ecture - r obotics pramod abichandani, ph.d. richard...
TRANSCRIPT

1
ENGINEERING DESIGN LAB IIENGR-102 WEEK 2 LECTURE - ROBOTICS
Pramod Abichandani, Ph.D.
Richard Primerano, Ph.D.
TOUCH, DISTANCE, AND LIGHT SENSORSLAB WEEK 2 OVERVIEW
2
LAST WEEK
Basics of Robot Motion Basics of the NXT Kit
3
TODAY
Sensors Touch Distance Light

4
SENSORS

5
SENSORS
Devices to sense the environment Provide capabilities for situational awareness When connected to electronic components,
Convert a physical signal to an electrical signal Called transducers
Different types of sensors for the NXT system Touch (Week 2) Distance (Week 2) Light (Week 3) Sound

6
TOUCH SENSORUsing Switches
7
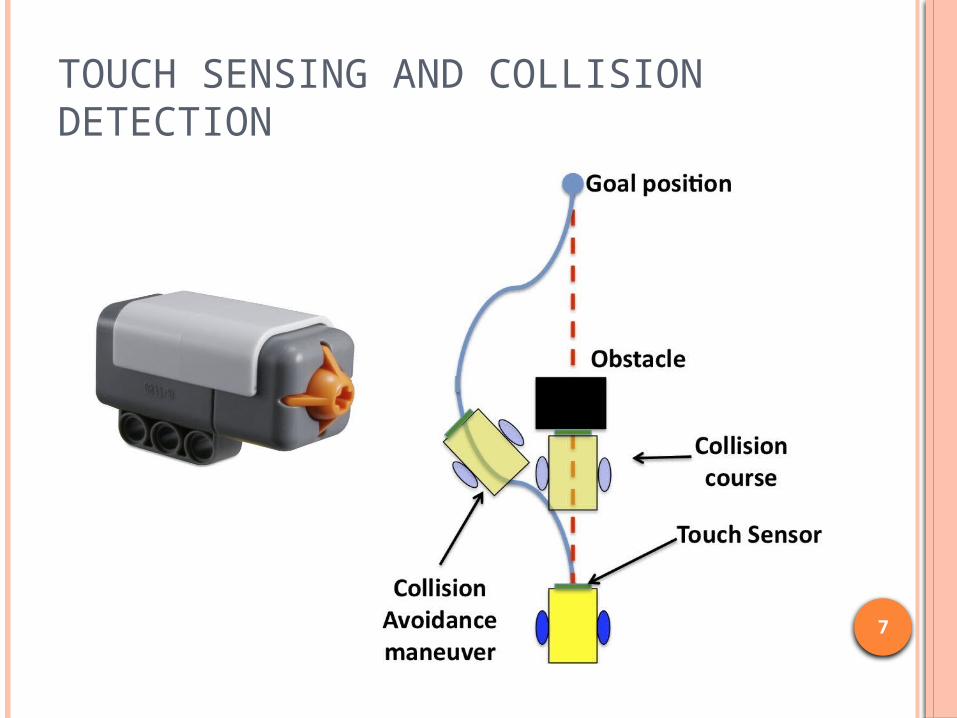
TOUCH SENSING AND COLLISION DETECTION

8
DIFFERENT TOUCH ACTIONS

9
DISTANCE SENSINGUltrasound Sensor

10
ULTRASONIC DISTANCE SENSOR
The ultrasonic sensor transmits an ultrasonic pulse (40kHz) and measures the amount of time taken for the signal to bounce off a distant object and reflect back.
Sound travels approximately 1,126 ft/sec in air (13.5 in/ms).
Note that the ultrasonic sensor measures the round trip time of the sound wave. 6.76 inches per millisecond of delay

11
ULTRASONIC DISTANCE SENSOR
The NXT handles all of the pulse timing and reports a distance in inches or centimeters directly. Use centimeter mode. This gives higher
resolution.
The sensor’s performance varies depending on the size, shape, location, and absorption of the target.
12
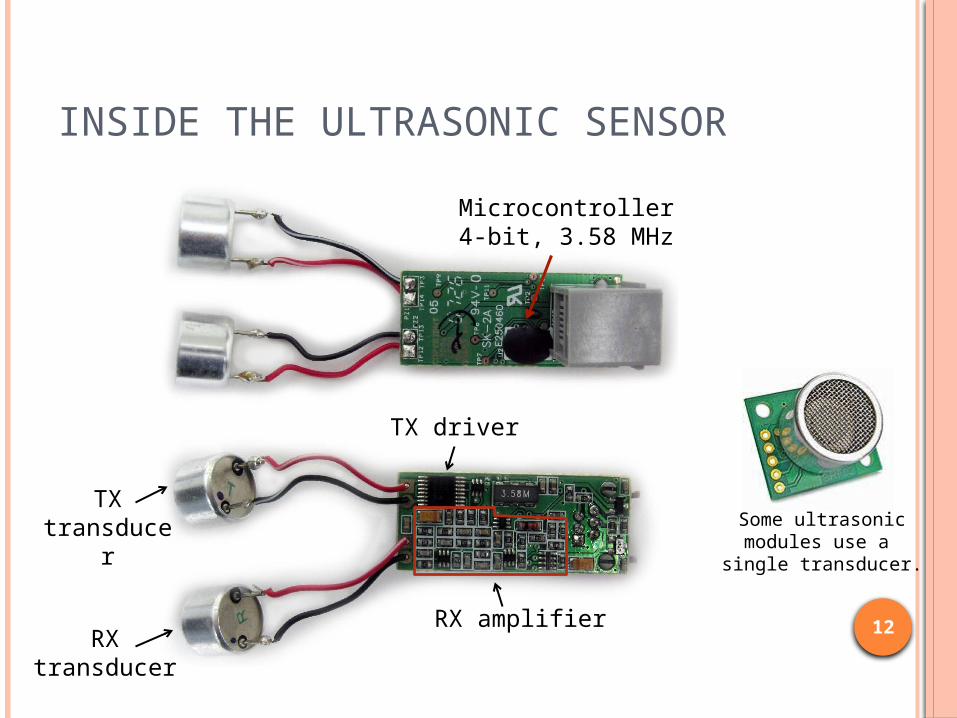
INSIDE THE ULTRASONIC SENSOR
RXtransducer
TXtransducer
TX driver
RX amplifier
Microcontroller4-bit, 3.58 MHz
Some ultrasonicmodules use a
single transducer.

13
THE EFFECT OF TARGET GEOMETRY ON RETURNED ECHO
The largest signal reflection will be achieved when the target’s surface is normal to the incident acoustic pulse.

14
THE EFFECT OF TARGET GEOMETRY ON RETURNED ECHO
How large should the target be to get a good return?
How much misalignment can be tolerated?

15
WHICH WILL HAVE A LARGER RETURN ECHO?
A
B

16
THE EFFECT OF TARGET GEOMETRY ON RETURNED ECHO
If multiple targets are present, errors or erratic behavior can be observed.
Some ultrasonic sensors are able to resolve multiple reflections (from multiple targets).
Bonus simulation
!

17
CHARACTERIZING YOUR ULTRASONIC SENSOR
Populate the following table
Use Excel’s trend-line fitting to find the line Estimated Distance = (slope)(Average Measurement) +
(intercept) Demonstration provided in lecture

18
ULTRASONIC SENSOR AND COLLISION AVOIDANCE
Use the line to perform collision avoidance

19
THANK YOU!