e. nikolaidis aerospace and ocean engineering department...
TRANSCRIPT

Design under uncertainty
E. Nikolaidis
Aerospace and Ocean EngineeringDepartment
Virginia Tech

Acknowledgments
Sophie Chen (VT)
Harley Cudney (VT)
Raphael Haftka (UF)
George Hazelrigg (NSF)
Raluca Rosca (UF)

Outline
• Decision making problem
• Why we should consider uncertainty indesign
• Available methods
• Objectives and scope
• Comparison of probabilistic and fuzzy setmethods
• Concluding remarks

1. Decision making problemNoiselevel (db)
Cost ($)
Initial target
Design 1
Design 2Design 3
Which design is better ?

Taxonomy of decision problems(Keney and Raiffa, 1994)
Certainty aboutoutcomes of actions
Uncertainty aboutoutcomes of actions
ONEATTRIBUTE ISSUFFICIENTFORDESCRIBINGAN OUTCOME
Type I problemsApproach:
Deterministicoptimization
Type II problemsApproaches: Utility
theory, fuzzy settheory
MULTIPLEATTRIBUTESARE NEEDEDFORDESCRIBINGAN OUTCOME
Type III problemsApproaches: Utility
theory, fuzzy settheory
Type IV problemsApproaches: Utility
theory, fuzzy settheory

Types of uncertainty
Irreducible:due to inherent randomnessin physical phenomena and processes
Reducible: due to use of imperfect models to predictoutcomes of an action
Statistical:due to lack of data for modelinguncertainty

Preferences• An outcome is usually described with one
or more attributes
• Preferences are defined imprecisely: noclear sharp boundary between success andfailure
• Need a rational approach to quantify valueof an outcome to decision maker– Utility theory
– Fuzzy sets

2. Why we should consideruncertainty in design
• Design parameters are uncertain -- there isno way to make a perfectly safe design
• Ignoring uncertainty and using safetyfactors usually leads to designs withinconsistent reliability levels

• Safety factor
• Worst case scenario-convex models
• Taguchi methods
• Fuzzy set methods
• Probabilistic methods
3. Available methods

Probabilistic methods
• Approach
– Model uncertainties using PDF’s
– Estimate failure probability
– Minimize probability of failure and/or cost
• Advantage: account explicitly for probability of failure
• Limitations:
– Insufficient data
– Sensitive to modeling errors (Ben Haim et al., 1990)

Fuzzy set based methods• Possibility distributions
• Possibility of event = 1-degree of surprise(Shackle, 1969)
• Relation to fuzzy sets (Zadeh, 1978):
X is about 10:
1
10 8 12
0.25
Possibility distribution
Probability distribution

Fuzzy sets in structural design
• Uncertainty in mechanical vibration:Chiang et al., 1987, Hasselman et al., 1994
• Vagueness in definition of failure ofreinforced plates (Ayyub and Lai, 1992)
• Uncertainty and imprecision in preferencesin machine design (Wood and Antonsson,1990)

• Relative merits of probabilistic methods andfuzzy sets may depend on:– Amount and type of available information
about uncertainty
– Type of failure (crisp or vague)
– Accuracy of predictive models

Important issues
• Are fuzzy sets better than probabilities inmodeling random uncertainty when littleinformation is available?
• How much information is little enough toswitch from probabilities to fuzzy sets?
• Compare experimentally fuzzy set andprobabilistic designs

4. Objectives and scope
• Objectives:– Compare theoretical foundations of
probabilistic and fuzzy set methods
– Demonstrate differences on example problems
– Issue guidelines -- amount of information
• Scope:– Problems involving uncertainty
– Problems involving catastrophic failure Æclear, sharp boundary between success andfailure

5. Comparison of probabilisticand fuzzy set methods
• Comparison of theoretical foundations– Axiomatic definitions
– Probabilistic and possibility-based models ofuncertainty
– Risk assessment
– Design for maximum safety
• Comparison using a design problem

Axiomatic definitions
Probability measure, P(⋅) Possibility measure, Π(⋅)1) P(A) ≥ 0 ∀ A∈S 1) Boundary requirements:
Π(∅)=0, Π(Ω)=12) Boundary requirement:
P(Ω)=12) Monotonicity:
)()(then
,,,
BA
BAifSBA
Π≤Π⊆∈∀
3) Probability of union ofevents
)()(
disjoint are ,,
1
∑=
∈∀
∈= Iii
I
ii
ii
APAP
AIiA
U
3) Possibility of union of afinite number of events
))((max)(
disjoint ,,
1iIi
I
ii
ii
AA
AIiA
Π=Π
∈∀
∈=U

• Probability measure can be assigned to themembers of a s-algebra. Possibility can beassigned to any class of sets.
• Probability measure is additive with respectto the union of sets. Possibility issubadditive.
Differences in axioms
1)()(
1)()(
≥Π+Π
=+C
C
AA
APAP

Probability density and possibility distributionfunctions
Area=1
x
fX(x)
x0
P(X=x0)=0
≠ 1
ΠX(x)
x
Area≥1
x0
Π(X=x0)≠0
1

Modeling an uncertain variable when very littleinformation is available
Maximum uncertainty principle: use model that maximizesuncertainty and is consistent with data
1
10 8 12
0.25
Possibility distribution
Probability distribution
8.5

• Increase range of variation from [8,12] to [7,13]:
– Failure probability: 0.13Æ0.08
– Failure possibility: 0.50 Æ0.67
• Design modification that shifts failure zone from[8,8.5] to [7.5,8]
– failure probability: 0.13 Æ0 (if range ofvariation is [8,12])
– failure probability remains 0.08 (if range ofvariations is [7,13])

• Easy to determine most conservativepossibility based model consistent with data
• Do not know what modeling assumptionswill make a probabilistic model moreconservative
• Probabilistic models may fail to predicteffect of design modifications on safety
• The above differences are due to thedifference in the axioms about union ofevents

Risk assessment: Independence ofuncertain variables
• Assuming that uncertain parameters areindependent always makes a possibilitymodel more conservative. This is not thecase with probabilistic models
P, P
P, P
PFS=P2 if independentPFS=P if perfectly correlated
PFS= P in both cases where components are independent or correlated

A paradoxProbability-possibility consistency:
The possibility of any event should always be greater or equal to its probability
...
P, P
PFS=1-(1-P)n PFS=P

Number of components
1 System failure probability
System failurepossibility
To ensure that failure possibility remains equal or greater than failure possibility need to impose the condition:
1)(,0)(: =Π∀ AAPA f
P
P
1

Design for maximum safety
• Probabilistic design :– find d1,…, dn
– to minimize PFS
– so that g0
• Possibility-baseddesign:– find d1,…, dn
– to minimize PFS
– so that g0
Two failure modes:PFS=PF1+PF2-PF12 PFS=max(PF1, PF2)

Optimality conditions
dd0
d
PF
d
PF
∂∂−=
∂∂ 21
PF1
PF2
Assume PF12 small
dd0
PF1=PF2
PF1
PF2
P P

Comparison using a design problem
• No imprecision in defining failure• Only random uncertainties• Only numerical data is available about uncertainties
How to evaluate methods:Average probability of failure

General approach for comparison
Optimization: Maximize Safety
Fuzzy Design Probabilistic Design
Probabilistic Analysis Probabilistic Analysis
Compare relative frequencies of failure
Informationabout uncertainties
IncompleteinformationBudget
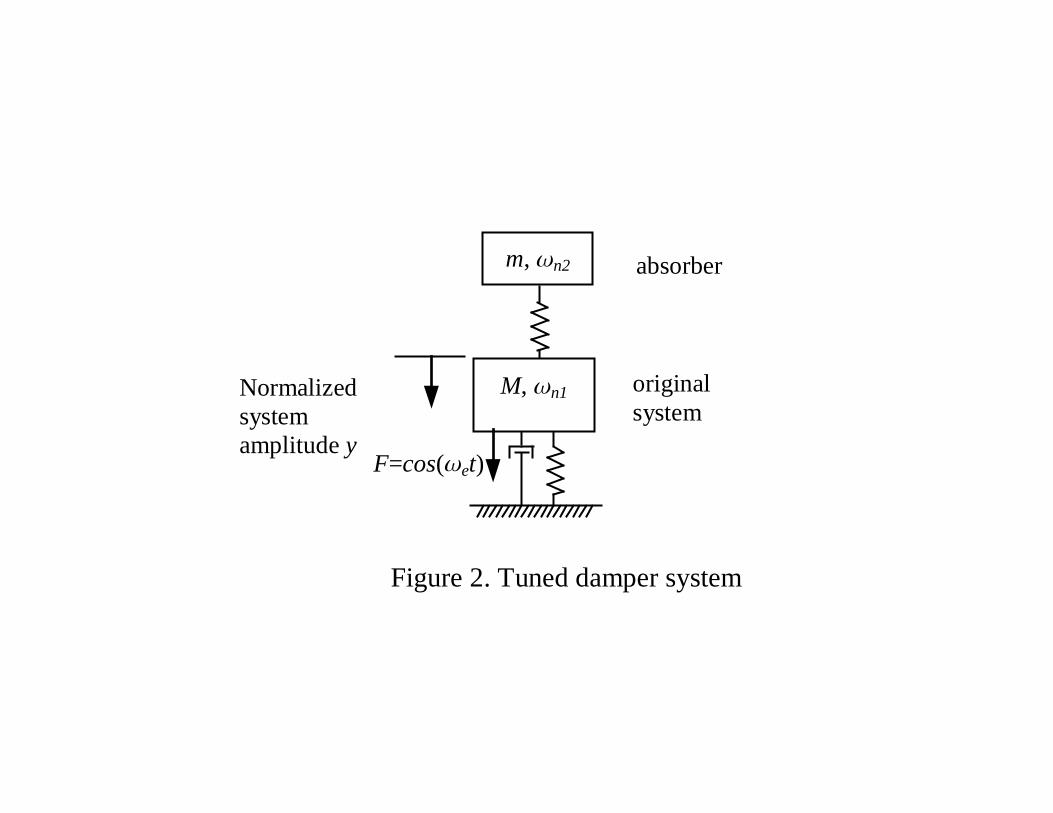
m, wn2 absorber
originalsystem
M, wn1
F=cos(wet)
Figure 2. Tuned damper system
Normalizedsystemamplitude y

Original SDOF system

Failure modes1. Excessive vibration
2. Cost > budget (cost proportional to m)
β0.8 0.84 0.88 0.92 0.96 1 1.04 1.08 1.12 1.16 1.2
0
12
24
36
48
60
Figure 4. Amplitude of system vs. β, ζ=0.01
Syst
em a
mpl
itud
e
:R=0.05; : R=0.01
b normalizednaturalfrequencies(assumedequal)

Uncertainties1 Normalized frequencies
2 Budget
• Know true probability distribution of budget
• Know type of probability distribution ofnormalized frequencies and their meanvalues, but not their scatter
• Samples of values of normalizedfrequencies are available

Design problem
• Find m
• to minimize PF (PF)
• PF=P(excessive vibrationcost overrun)
• ½F=P(excessive vibration cost overrun)
• heavy absorber, low vibration but high cost

Estimation of variance of b
Concept of maximum uncertainty: if little information is available, assume modelwith largest uncertainty that is consistent with the data

Comparison of ten probabilistic and ten possibility-based designs.Three sample values were used to construct models of
uncertainties. Blue bars indicate possibility-based designs. Redbars indicate probabilistic designs.
- Inflation factor method, unbiased estimation
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
1 2 3 4 5 6 7 8 9 10
Data group
Act
ual
pro
bab
ility
of
failu
re

sample size equal to 3,000
0
0.05
0.1
0.15
0.2
0.25
1 2 3 4 5 6 7 8 9 10
Data group
Act
ual
pro
bab
ility
of
failu
re

Probabilistic approach cannot predictdesign trends
R0 0.01 0.02 0.03 0.04 0.05 0.06 0.07
0
0.1
0.2
0.3
distribution of frequency - U(1,0.05)distribution of frequency - U(1,0.075)distribution of frequency - U(1,0.1)
Figure 5. Effect of standard deviations ofb1 andb2on the probability of failure vs. R ,
b1 and b2 are equal
Failu
re p
roba
bilit
y du
eto
exc
essi
ve v
ibra
tion

Comparison in terms of average failureprobability as a function of amount of
informationSample size Best design
351020100
1000Blue bullet: on average possibility is better, red bullet: on average probability is better

Concluding remarks
• Overview of problems and methods fordesign under uncertainty
• Probabilistic and fuzzy set methods --comparison of theoretical foundations
• Probabilistic and fuzzy set methods --comparison using design problem

Concluding remarks• Important to consider uncertainties
• There is no method that is best for all problemsinvolving uncertainties
• Probabilistic design better if sufficient data isavailable
• Possibility can be better if little information isavailable– easier to construct most conservative model consistent
with data
– probabilistic methods may fail to predict effect ofdesign modifications
• Major difference in axioms about union of events