ece 472/572 - digital image processingweb.eecs.utk.edu/~qi/...enhancement_frequency.pdf · ece...
TRANSCRIPT

1
ECE 472/572 - Digital Image Processing
Lecture 5 - Image Enhancement - Frequency Domain Filters 09/13/11
2
Roadmap
¬ Introduction – Image format (vector vs. bitmap) – IP vs. CV vs. CG – HLIP vs. LLIP – Image acquisition
¬ Perception – Structure of human eye
• rods vs. conss (Scotopic vision vs. photopic vision)
• Fovea and blind spot • Flexible lens (near-sighted vs. far-
sighted) – Brightness adaptation and
Discrimination • Weber ratio • Dynamic range
– Image resolution • Sampling vs. quantization
¬ Image enhancement – Enhancement vs. restoration – Spatial domain methods
• Point-based methods – Log trans. vs. Power-law
• Gamma correction • Dynamic range compression
– Contrast stretching vs. HE • What is HE? • Derivation of tran. func.
– Gray-level vs. Bit plane slicing – Image averaging (principle)
• Mask-based (neighborhood-based) methods - spatial filter
– Smoothing vs. Sharpening filter – Linear vs. Non-linear filter – Smoothing
• Average vs. weighted average • Average vs. Median
– Sharpening • UM vs. High boosting • 1st vs. 2nd derivatives
– Frequency domain methods
3
Questions
¬ In-depth understanding – Why do we need to conduct image processing in the frequency
domain? – What does Fourier series do? – What does the Fourier spectrum of an image tell you? – How to calculate the fundamental frequency? – Why is padding necessary?
¬ Properties – Is FT a linear or nonlinear process? – What would the FT of a rotated image look like? – When implementing FFT, what kind of properties are used? – What does the autocorrelation of an image tell you? – What is F(0,0)? Or Why is the center of the FT extremely bright?

2
4
Why FT? – 1
5
Why FT? – 2
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ){ }vuFvuHFyxg
vuFvuHvuGyxfyxhyxg
,,,,,,,,,
1−=
=⇔∗=
6
Another example

3
7
Fourier series
¬ Fourier series (SF) can represent any function over a finite interval TF
¬ Outside TF, SF repeats periodically with period TF.
€
complex form: s t( ) = cnej2nπfF t
n=−∞
∞
∑
cn =1TF
s t( )e− j 2nπfF tdt−TF / 2
TF / 2∫
8
Fourier series (cont’)
¬ TF is the interval of signal s(t) over which the Fourier series represents
¬ fF = 1/TF is the fundamental frequency of the Fourier series representation
¬ n is called the “harmonic number” – E.g., 2fF is the second harmonic of the fundamental frequency fF.
¬ The Fourier series representation is always periodic and is linear combinations of sinusoids at fF and its harmonics.
9
Fourier transform
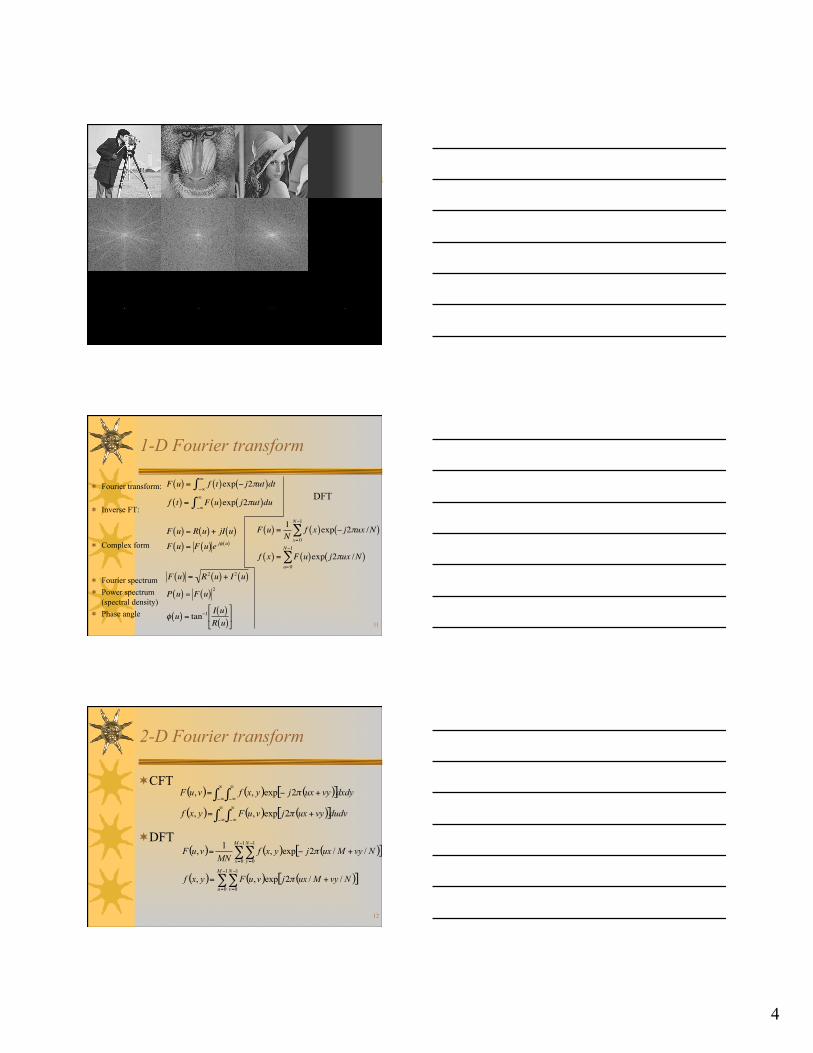
¬ Describe the frequency distribution
nfF
cn
u
v
(0,0)
4
10
11
1-D Fourier transform
¬ Fourier transform:
¬ Inverse FT:
¬ Complex form
¬ Fourier spectrum ¬ Power spectrum
(spectral density) ¬ Phase angle
€
F u( ) = f t( )−∞
∞
∫ exp − j2πut( )dt
f t( ) = F u( )−∞
∞
∫ exp j2πut( )du
F u( ) = R u( ) + jI u( )F u( ) = F u( )e jφ u( )
F u( ) = R2 u( ) + I2 u( )
P u( ) = F u( )2
φ u( ) = tan−1I u( )R u( )
'
( )
*
+ ,
€
F u( ) =1N
f x( )x= 0
N−1
∑ exp − j2πux /N( )
f x( ) = F u( )u= 0
N−1
∑ exp j2πux /N( )
DFT
12
2-D Fourier transform
¬ CFT
¬ DFT
( ) ( ) ( )[ ]
( ) ( ) ( )[ ]∫ ∫
∫ ∫∞
∞−
∞
∞−
∞
∞−
∞
∞−
+=
+−=
dudvvyuxjvuFyxf
dxdyvyuxjyxfvuF
π
π
2exp,,
2exp,,
( ) ( ) ( )[ ]
( ) ( ) ( )[ ]∑∑
∑∑−
=
−
=
−
=
−
=
+=
+−=
1
0
1
0
1
0
1
0
//2exp,,
//2exp,1
,
M
u
N
v
M
x
N
y
NvyMuxjvuFyxf
NvyMuxjyxfMN
vuF
π
π

5
13
Understanding and implementing Fourier transform
( ) ( ) ( )[ ]
( ) ( ) ( )[ ]∑∑
∑∑−
=
−
=
−
=
−
=
+=
+−=
1
0
1
0
1
0
1
0
//2exp,,
//2exp,1
,
M
u
N
v
M
x
N
y
NvyMuxjvuFyxf
NvyMuxjyxfMN
vuF
π
π
(0,0)
f(x,y)
x
y (0,0)
|F(u,v)| u
v yN
vxM
uΔ
=ΔΔ
=Δ1,1
14
0)*)1,1(*)0,1(
*)1,0(*)0,0((2*2
1)1,1(
0)*)1,1(*)0,1(
*)1,0(*)0,0((2*2
1)0,1(
5.127)*)1,1(*)0,1(
*)1,0(*)0,0((2*2
1)1,0(
5.127))1,1()0,1()1,0()0,0((2*2
1)0,0(
)2/1*12/1*1(2)2/0*12/1*1(2
)2/1*12/0*1(2)2/0*12/0*1(2
)2/1*02/1*1(2)2/0*02/1*1(2
)2/1*02/0*1(2)2/0*02/0*1(2
)2/1*12/1*0(2)2/0*12/1*0(2
)2/1*12/0*0(2)2/0*12/0*0(2
=++
+=
=++
+=
−=++
+=
=+++=
+−+−
+−+−
+−+−
+−+−
+−+−
+−+−
ππ
ππ
ππ
ππ
ππ
ππ
jj
jj
jj
jj
jj
jj
efef
efefF
efef
efefF
efef
efefF
ffffF
15
Understanding and implementing Fourier transform
¬ According to “translation”
( )( ) ( )2/,2/1,
period, complete oneFor
NvMuFyxf yx −−⇔− +
(0,0)
f(x,y) x
y
-255
255
(0,0)
f(x,y)(-1)x+y
x
y
-0
0
(0,0)
|F(u-M/2,v-N/2)| u
v

6
16
Understanding and implementing Fourier transform
17
Block diagram of FTIFT
f(x,y)(-1)x+y g(x,y)(-1)x+y
18
Impulse transforms

7
19
Typical transforms
¬ Gaussian hump ßà Gaussian hump
¬ Rectangular (square aperture) ßàsinc
¬ Pillbox (circular aperture) ßàjinc
20
Typical transforms
¬ Gaussian ridge
¬ Line impulse
( )2exp xπ−
( )0when
/exp 221
→
−−
τ
τπτ x
21
Reference
¬ All figures scanned from R. N. Bracewell’s “Two-Dimensional Imaging,” Prentice Hall, 1995.

8
22
2D FT pairs
( )
( )( )
( )( )( )( )[ ]22
00
exp
,,,,,
,
yx
yxcombyxtriyxrectyyxx
yx
yxf
+−
±±
π
δ
δ
( )
( ) ( )( )( )( )( )[ ]22
2
00
exp
,,sin
,sin2exp2exp
1
,
vu
vucombvuc
vucvyjuxj
vuF
+−
±±
π
ππ
23
Important properties of FT
¬ Linearity (distributivity && scaling) ¬ Separability ¬ Translation ¬ Periodicity ¬ Conjugate symmetry ¬ Rotation ¬ Convolution ¬ Correlation ¬ Sampling
24
Linearity
¬ FT is a linear image processing method
Linear System
x1(t) y1(t) x2(t) y2(t)
a*x1(t) + b*x2(t) a*y1(t) + b*y2(t)

9
25
Separability
( ) ( ) ( )[ ]∑∑−
=
−
=
+−=1
0
1
0
//2exp,1
,M
x
N
y
NvyMuxjyxfMN
vuF π
f(x, y) F(x, v) Row
transform F(u, v) Column
transform
26
Translation
( ) ( )[ ] ( )( ) ( ) ( )[ ]NvyuxjvuFyyxxf
vvuuFNyvxujyxf/2exp,,
,/2exp,
0000
0000
+−⇔−−
−−⇔+
π
π
€
To show one complete period,
f x,y( ) −1( )x+y⇔ F u − N /2,v − N /2( )
27
Periodicity and Conjugate symmetry
¬ Periodicity
¬ Conjugate symmetry ( ) ( ) ( ) ( )NvNuFNvuFvNuFvuF ++=+=+= ,,,,
( ) ( )( ) ( )vuFvuF
vuFvuF−−=
−−= ∗
,,,,

10
28
Example
29
Rotation
( ) ( )00 ,, θφωθθ +=+ Frf
30
Averaging
( ) ( )0,0, Fyxf =
( ) ( ) ( )[ ]
( ) ( ) ( )[ ]∑∑
∑∑−
=
−
=
−
=
−
=
+=
+−=
1
0
1
0
1
0
1
0
//2exp,,
//2exp,1
,
M
u
N
v
M
x
N
y
NvyMuxjvuFyxf
NvyMuxjyxfMN
vuF
π
π

11
31
Convolution
¬ Continuous and discrete convolution
¬ The convolution theorem
¬ Practically, computing the discrete convolution in the frequency domain often is more efficient than doing it in the spatial domain directly
( ) ( ) ( ) ( )( ) ( ) ( ) ( )vuGvuFyxgyxf
vuGvuFyxgyxf,,,,,,,,
∗⇔
⇔∗
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )∑∑
∫ ∫−
=
−
=
∞
∞−
−−=∗
−−=∗
1
0
1
0,,1,,
,,,,
M
m
N
neeee nymxgnmf
MNyxgyxf
ddyxgfyxgyxf βαβαβα
32
Correlation
¬ Continuous and discrete correlation
¬ The correlation theorem
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )∑∑
∫ ∫−
=
−
=
∞
∞−
++=
++=
1
0
1
0
*
,,1,,
,,,,
M
m
N
neeee nymxgnmf
MNyxgyxf
ddyxgfyxgyxf
βαβαβα
( ) ( ) ( ) ( )( ) ( ) ( ) ( )vuGvuFyxgyxf
vuGvuFyxgyxf
,,,,,,,,
*
*
⇔
⇔
33
Correlation (cont’)
¬ Autocorrelation vs. cross correlation ¬ Autocorrelation theorem
¬ Application: template or prototype matching
( ) ( ){ } ( )2,,, vuFyxfyxfF =

12
34
Practical issues – Implement convolution in frequency domain
¬ In spatial domain
¬ In frequency domain – f*g çè F(f)G(g) – Phase? Mag? – How to pad?
35
36

13
37
38
39
Difference image from convolution in the spatial domain
Convolution in the frequency domain
Conv. spatially
No padding With padding

14
40
Different enhancement approaches
¬ Lowpass filter ¬ Highpass filter ¬ Homomorphic filter
41
Lowpass filtering
¬ Ideal filter – D(u, v): distance from point (u, v) to the origin – cutoff frequency (D0) – nonphysical – radially symmetric about the origin
¬ Butterworth filter
¬ Gaussian lowpass filter
( )( )( )!
"#
>
≤=
0
0
, if 0, if 1
,DvuDDvuD
vuH
( )( )[ ] nDvuD
vuH 20/,1
1,+
=
( ) ( ) 20
2 2/,, DvuDevuH −=
42

15
43
Power ratio 99.96à99.65à99.04à97.84
( ) ( )!"
#$%
&= ∑∑
u vT vuPvuP ,/,100β
44
Highpass filter
¬ Ideal filter
¬ Butterworth filter
¬ Gaussian highpass filter
( )( )( )!
"#
>
≤=
0
0
, if 1, if 0
,DvuDDvuD
vuH
( )( )[ ] nvuDD
vuH 20 ,/11,
+=
( ) ( ) 20
2 2/,1, DvuDevuH −−=
45

16
46
47
Example
48
The Laplacian in the frequency domain
€
∇2 f x,y( ) =∂2 f∂x 2
+∂2 f∂y 2
€
H(u,v) = −4π 2 u2 + v 2( )
Pay attention to the scaling factor

17
49
UM in the frequency domain
€
g(x,y) = f (x,y) + k ∗ gmask (x,y) = f (x,y) + k ∗ ( f (x,y) − fLP (x,y))g(x,y) =ℑ−1{[1+ k ∗HHP (u,v)]F(u,v)}
50
Homomorphic filtering
¬ A simple image model – f(x,y): the intensity is called the gray level for
monochrome image – f(x, y) = i(x, y).r(x, y) – 0 < i(x, y) < inf, the illumination – 0< r(x, y) < 1, the reflectance
51
Homomorphic filter (cont’) ( ) ( ) ( )( ) ( ) ( ) ( )( ){ } ( ){ } ( ){ }
( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
( ) ( )[ ] ( )[ ] ( )[ ]yxryxiyxsyxg
yxryxiyxs
vuFvuHvuFvuHvuS
vuFvuFvuZyxrFyxiFyxzFyxryxiyxfyxz
yxryxiyxf
ri
ri
,exp,exp,exp,
,,,
,,,,,
),(),(),(,ln,ln,,ln,ln,ln,
,,,
!!==
!+!=
+=
+=
+=
+==
⋅=

18
52
Homomorphic filter (cont’)
¬ The illumination component – Slow spatial variations – Low frequency
¬ The reflectance component – Vary abruptly, particularly at the junctions of
dissimilar objects – High frequency
¬ Homomorphic filters – Affect low and high frequencies differently – Compress the low frequency dynamic range – Enhance the contrast in high frequency
53
Homomorphic Filter (cont’)
11
<
>
L
H
γ
γL
DvuDcLH evuH γγγ +−−= − ]1)[(),( )/),(( 2
02
54

19
55
Homomorphic filter - example
56
¬ Point processing
¬ Simple gray level transformations – Image negatives – Log transformations – Power-law
transformations – Contrast stretching – Gray-level slicing – Bit-plane slicing
¬ Histogram processing – Histogram
equalization – *Histogram matching
(specification) ¬ Arithmetic/logic
operations – Image averaging
¬ Mask processing (spatial filters)
¬ Smoothing filters (blur details) – Average, weighted
average – Order statistics (e.g.
median)
¬ Sharpening filters (highlight details) – Unsharp masking – High-boost filters – Derivative filters
• The Laplacian • The Gradient
• Frequency domain filters
• Smoothing filters (blur details)
• Ideal lowpass filter • Butterworth lowpass • Gaussian lowpass
• Sharpening filters (highlight details)
– Unsharp masking – High-boost filters – Derivative filters - The
Laplacian – Ideal highpass filter – Butterworth highpass filter – Gaussian highpass filter
• Homomorphic filtering
57
FFT and IFFT