electromagnetics and electric machines stefan holst, cd...
TRANSCRIPT

Electromagnetics and Electric Machines
Stefan Holst, CD-adapco

Electric machines intro
Designing electric machines with SPEED
Links to STAR-CCM+ for thermal modeling
Electromagnetics in STAR-CCM+
Overview

Basic definition: • A motor is a machine that converts electrical energy into mechanical energy. • A generator (also alternator or dynamo) is a machine that converts mechanical energy into
electrical energy. • This can be due to rotation or translation. • A traction motor on a vehicle may perform both tasks. Electric motors and generators are
commonly referred to as electric machines.
Basic function: Most electric motors operate through the interaction of magnetic fields and current-carrying conductors to generate an electromagnetic force.
The Electrical Machine – the basic definitions and function

The Electrical Machine – the main parts
A simple Electric motor has the following main parts: • Rotor (turning part) carrying either
• an excitation DC winding or permanent magnets or • a three phase winding or a squirrel cage or • an armature winding
• Stator (fixed part) having • a stator winding (single, 2-, 3-, n-phase) or • exictation permanent magnets
• a commutator: a rotary mechanical switch, which reverses the current between the external circuit and the rotor along with the
• brushes, • a shaft with bearings and bearing shields, • a cooling system • a housing

• Electric machines may be classified by • the source of electric power, • their internal construction, • their application, or • the type of motion they give.
The Electrical Machine – classification
• They may be powered by • direct current (DC), e.g., a battery
powered portable device or DC source (rectified AC) or
• alternating current (AC) from a central electrical distribution grid or inverter.

• The smallest electric motors are mostly found on electric wristwatches.
The Electrical Machine – Scale: From a few mW to several GW
• Medium-size motors of highly standardized dimensions and characteristics provide convenient mechanical power for industrial uses.
Small watch motor vs. big hydroelectric generator mW & mm diameter Three Gorges Dam: 22,500 MW & several m dia.
• The very largest electric motors are used for pipeline compressors, propulsion of ships and water pumps and of course as generators.

SPEED – What does SPEED has to do with electrical machines?
SPEED is the leading design software for electric machines
• Detailed analytical analysis with finite-element links or finite-embedded solver for • Motors, Generators and Alternators • including inverters and other electronic controls
• Over 150 corporate accounts • Over 1500 users
• A Worldwide CD-adapco Direct Sales Team and additional a Distributors Network including support
• Operating in all industrialized countries

• The following machine types are available:
– brushless permanent magnet and wound-field AC synchronous
• PC-BDC
– induction • PC-IMD
– switched reluctance
• PC-SRD
– direct current (PM) • PC-DCM
– wound field and PM commutator • PC-WFC
The SPEED software programs

SPEED – The design process
1
2
3
4
5
6
7
8

SPEED in use: Definition of the winding – The winding editor
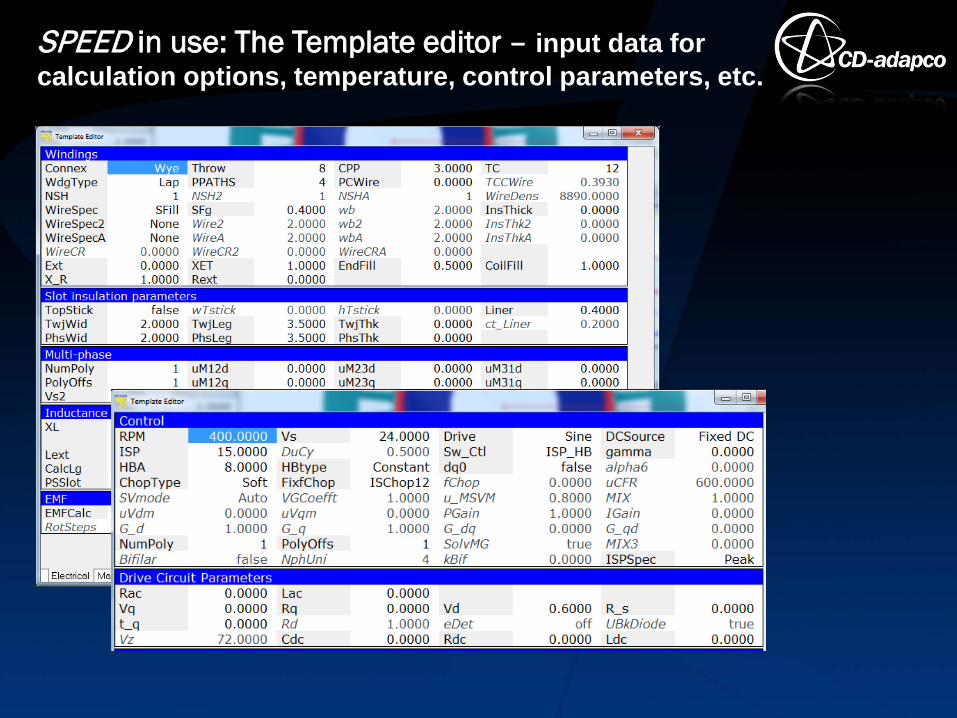
SPEED in use: The Template editor – input data for calculation options, temperature, control parameters, etc.

SPEED in use: Graphical Output – range of graphical feedback available

SPEED in use: Output design sheet – large range of numerical values available

SPEED in use: GoFER Go to Finite-Elements and Return
… or use the embedded FE-solver directly (PC-BDC)

SPEED and STAR-CCM+ – the combined workflow for Electrical Machines
Initial design with SPEED
PC-FEA: Loss table calculation
Reading the SPEED geometry and the loss distribution Running the final advanced thermal calculation.
Temperatures impact life time, reliability, cost & size

STAR-CCM+
THERMAL 2D/3D EMAG
SPEED
PC-FEA
time
analytical
STAR-CCM+
SPEED analytical
ELMAC
THERMAL 2D/3D EMAG
PC-FEA
SPEED Development
STAR-CCM+ Development
STAR- CCM+ EMAG only
• Analytical calculations • Geometry templates of electrical machines • Winding schemes • Power electronic circuits • Switch control • Scripts to drive the EMAG/Thermal calculations • …
SPEED and STAR-CCM+ – future: ELectrical MAchine Capability

STAR-CCM+ Electrical Machine Capabilities – Geometry setup
Adding end winding Different rotor types 2D to 3D extrusion
Different machine types

STAR-CCM+ Electrical Machine Capabilities – Symmetries and Periodicity

STAR-CCM+ Electrical Machine Capabilities – Stator and rotor skewing
Stator skewing
Rotor skewing, stepped: linear, V:

20
STAR-CCM+ Electrical Machine Capabilities – Simplified Winding for Cooling Simulations
Tub end windings for Cooling Simulation for BDC Motor

What does low frequency EMAG mean
Low frequency regime is valid for cases with 𝝏𝒕𝑫 ≪ 𝑱 – Displacement current 𝝏𝒕𝑫 = 𝝏_𝒕(𝜺𝜺) is
growing with highly fluctuating fields • Radar signals (low conduction current) • Electric machines in contrast are driven by
conduction currents
STAR-CCM+ solves for potentials – Formulation simplifies by using electric
potential 𝜙 and magnetic vector potential 𝐴 𝐸 = 𝛻𝜙,𝐵 = curl𝐴, and div𝐴 = 0
Transient mode, magnetostatic, and magnetostatic and motion

Solver Status v7.06
Formulation is validated for 2D simulations – For transverse magnetics (current
normal to simulation plane) equations reduce to solving for 𝜙 and 𝐴𝑧
In 3D simulation stability issues arise along magnetic to non-magnetic material interfaces – Proximity effect simulation in
copper wire are possible – Molten metal looses magnetic
properties

Excitation Coils available in v8.02
Current driven simulation – Magneto-static situation – Current strength & orientation
Modeling coil as bulk region – Orientation given by contour – Winding parameter Number of
Turns multiplied by Electric Current defines applied current density
Post processing – Specific Magnetic Flux linkage FF – Volume integral delivers flux
linkage of region

Electrically conducting fluids Magneto hydrodynamics – Plasma simulation – Mixing of molten metal
STAR-CCM+ v8.02 will bring one way coupling – Given magnetic field forces as momentum source for the fluid
Hartmann channel validation – Magnetic flux aligned to y-axis leads to secondary flow pattern – For strong B-field, velocity profile looks like in turbulent flow (more mixing)
Link to other physics model in STAR-CCM+

Lorentz force currently requires field function cross($$MagneticFluxDensity,$$Velocity) cross($$MagneticFluxDensity,$$ParticleVelocity)
For Lagrange phases this is specified as an external force field Applications – Particle tracing due to field change – CRT
Lorentz force acting on charged particles

Electromagnetic field calculations are costly Circuit modeling helps reducing the EMAG simulation domain considerably – Electric machines can for the most part be simulated in 2D in the design
stage of product development – Circuit modeling will deliver currents to be applied in the winding regions – Field simulation provides flux linkages – Applied voltages are an input parameter
or stem from more complex controller models
Coupling field and circuit simulation

Simulink is a block diagram environment for designing general control flow diagrams including electrical circuits – Simulink handles discrete or continuous states
• Continuous state handling is needed for the circuit coupling – Model is transferred internally into a differential algebraic equation
• Solution method can be auto-selected or user specified
Transient STAR-CCM+ can provide individual post-processed values at every time step – Supply of flux linkage Ψ𝐼 or even its time derivative (𝜕𝑡Ψ)𝐼
Data exchange via minimal exchange protocol, transmitted over TCP connection between programs, – Allows running Simulink and STAR-CCM+ on different machines
Coupling STAR-CCM+ to Simulink®/MATLAB®

Start simulation •Open port
Macro connects to
Simulink port
Specify reports
Store list of reports
Specify input: • field functions • time step size
Run Step •Send reports
Update circuit time step
Protocol Design
……

Test case

Coupling STAR-CCM+ to Simulink®/MATLAB®
Simulink data enters STAR-CCM+ via Java Macro scripting – Macro listens for input parameters
Field Function,CurrentPhase1,<0.3 A>
Field Function,CurrentPhase2,<0 A>
Field Function,CurrentPhase3,<10.3 A>
– Step protocol element leads to time step with a specified size (0.1s) Step,0.1
The STAR-CCM+ representation within Simulink – Level 2 Matlab functions
• Provides function hooks for link initialization and data update • Matlab language easily interfaces with Java one language protocol
implementation – STAR-CCM+ provides state value 𝑋𝑆 directly in SI units
Report,FluxLinkagePhase1,0.7
– In Continuous state integration Simulink requires derivative at each time step • Derivative is calculate with respect to last Simulink value 𝑋𝑀 as (𝑋𝑆 − 𝑋𝑀)/𝑑𝑑

STAR-CCM+ and Simulink communicate over sockets Offers continuous state coupling of field simulation to circuit – Explicit Euler Simulink solver needed
Current approach only uses scripts – Soon on http://javahut.cd-adapco.com
Protocol extends to any application – Anything in STAR-CCM+ that can be defined as a field function can be an
input – Any report value can be an output to Simulink/Matlab
Coupling Summary