emig summer school - robotics - slideseitidaten.fh-pforzheim.de/daten/mitarbeiter/johannsen/... ·...
TRANSCRIPT
ROBOTICS
1
ROBOTICS
Summer School EMIG – Engineers Made in Germany
Robotics – An Interactive Introduction to Programming Robots
Prof. Dr. Peer Johannsen
ROBOTICS
2
ROBOTICS
• Prof. Dr. rer. nat. Peer Johannsen– Computer Science and Software-Engineering– School of Engineering– Department of Information Technology– Dean of Studies, Computer Engineering Degree Program– [email protected]
• Teaching and Research Interests– Applied and Theoretical Computer Science– Formal Logic– Software-Development, Programming Languages– Algorithms and Data Structures– Robotics and Robot Programming
• Certified Roberta Teacher– Fraunhofer IAIS Initiative „Roberta – Lernen mit Robotern“
(“Roberta – Learning with Robots”)
Who I am
Contact:
Pforzheim University School of Engineering
Department of Information TechnologyRoom T1.4.29
ROBOTICS
3
ROBOTICS
• School of Engineering– Department of Information Technology
• Bachelor Degree Programs– Mechatronics, Computer Engineering,
Electrical Engineering, Medical Engineering• Master Degree Program
– Embedded Systems
ROBOTICS
4
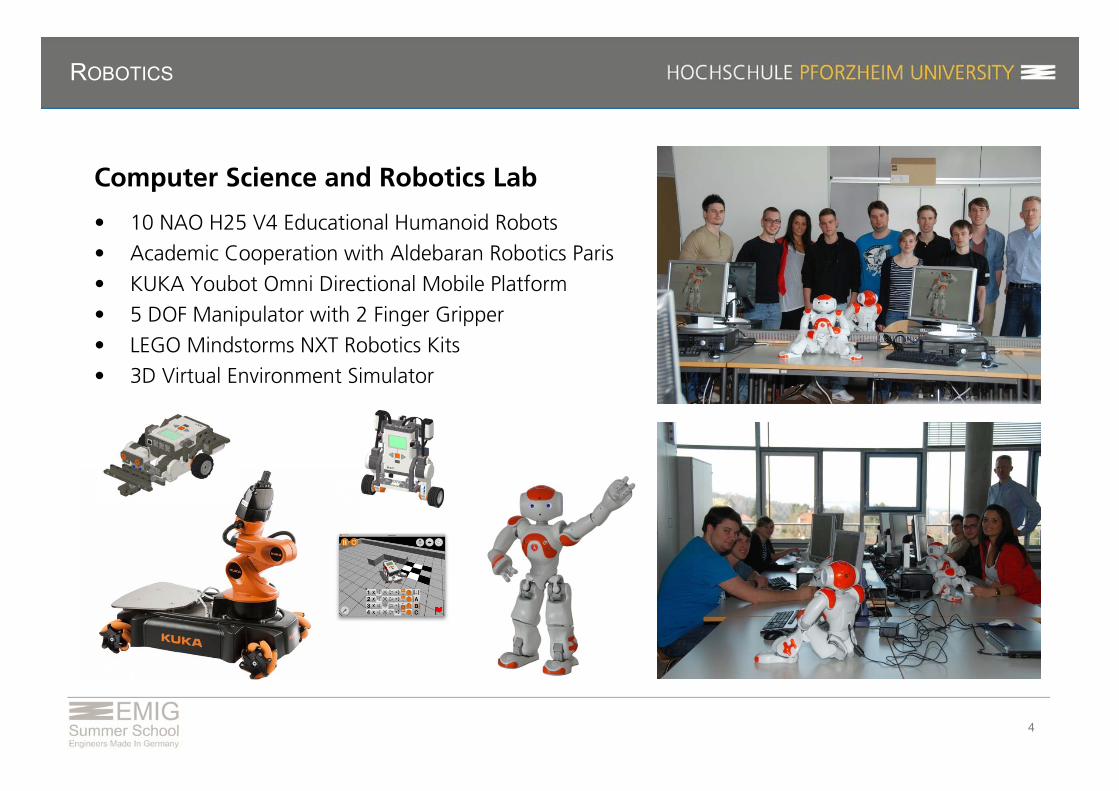
Computer Science and Robotics Lab
• 10 NAO H25 V4 Educational Humanoid Robots• Academic Cooperation with Aldebaran Robotics Paris• KUKA Youbot Omni Directional Mobile Platform• 5 DOF Manipulator with 2 Finger Gripper• LEGO Mindstorms NXT Robotics Kits• 3D Virtual Environment Simulator
ROBOTICS
5
• Lab Activities– Introductory and advanced lectures– Programming languages and programming
techniques– Robotics and robot programming– Student projects– Research projects– Thesis projects–
• Objectives– Using robots to spike an interest in
Computer Science and programming– Giving students the possibility to work on a
real robot in the classroom
ROBOTICS
6
ROBOTICS
Summer School EMIG – Engineers Made in Germany
Robotics – An Interactive Introduction to Programming Robots
or:How to think like an
Engineer
ROBOTICS
7
ROBOTICS
Case Study – Mobile Robot Platform KUKA youBot
Case Study – Humanoid Robot NAO
Case Study – Cube Solving Robot
Algorithms
Flowcharts
ROBOTICS
8
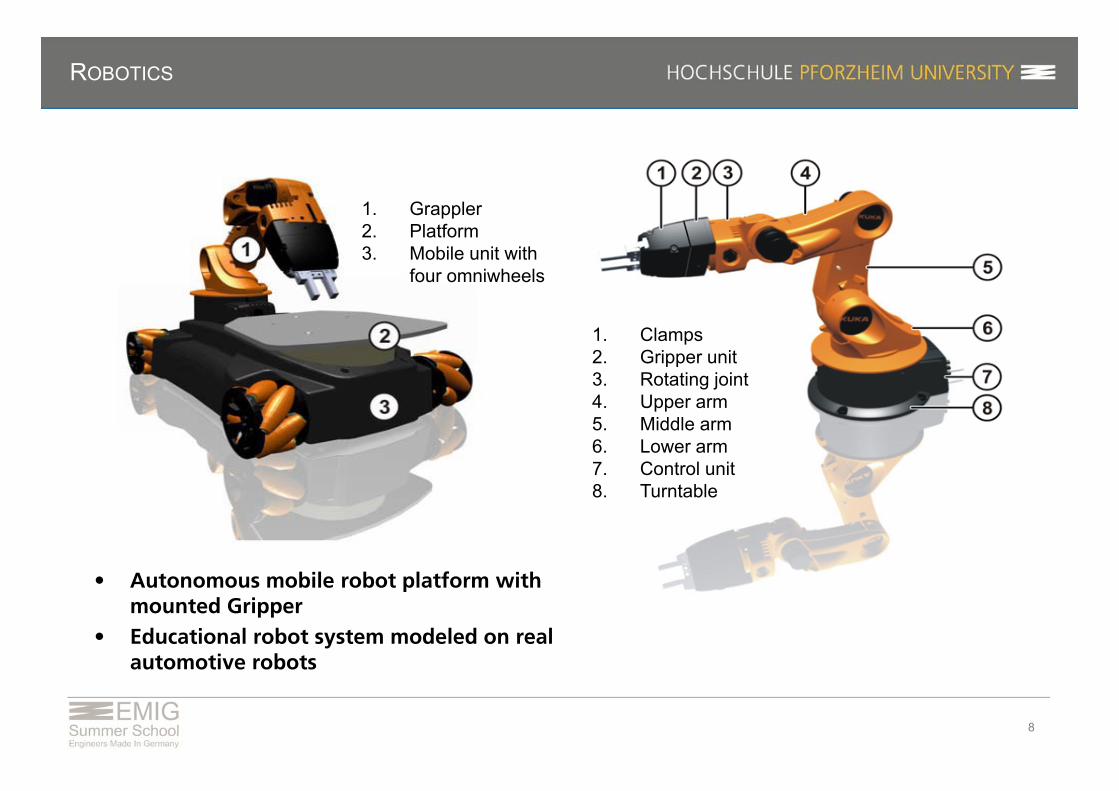
1. Grappler2. Platform3. Mobile unit with
four omniwheels
1. Clamps2. Gripper unit3. Rotating joint4. Upper arm5. Middle arm6. Lower arm7. Control unit8. Turntable
• Autonomous mobile robot platform withmounted Gripper
• Educational robot system modeled on real automotive robots
ROBOTICS
9
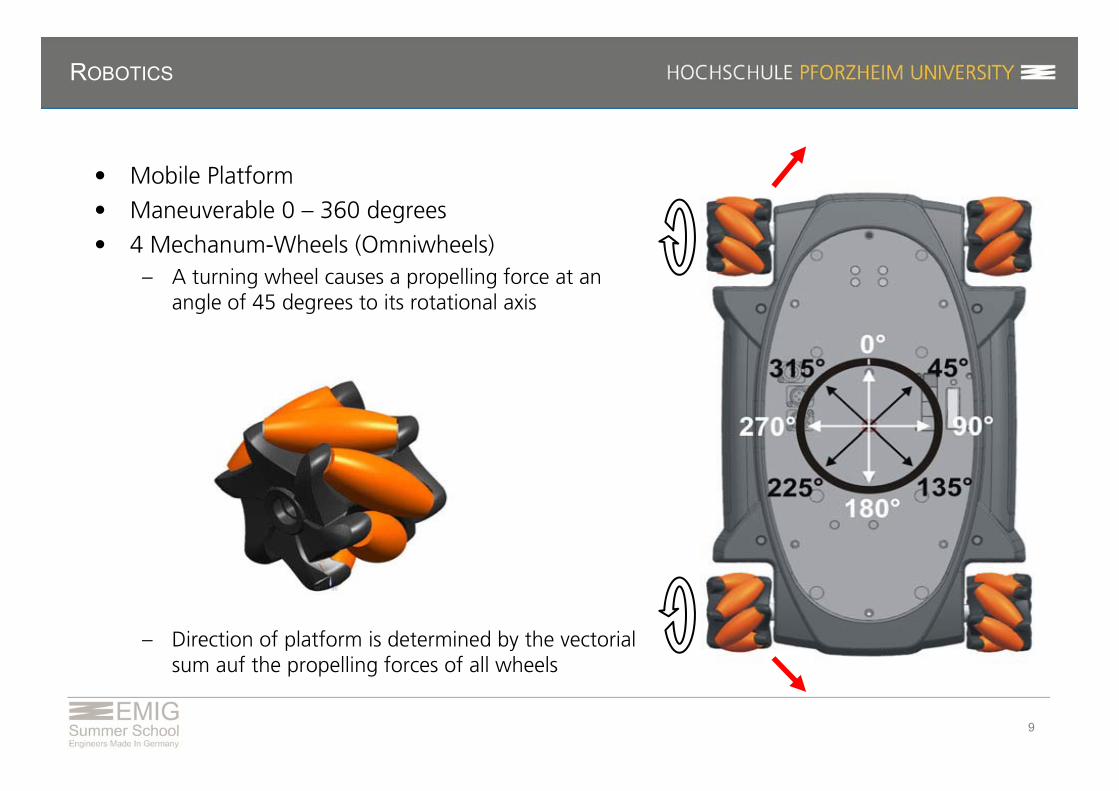
• Mobile Platform• Maneuverable 0 – 360 degrees• 4 Mechanum-Wheels (Omniwheels)
– A turning wheel causes a propelling force at an angle of 45 degrees to its rotational axis
– Direction of platform is determined by the vectorialsum auf the propelling forces of all wheels
ROBOTICS
10
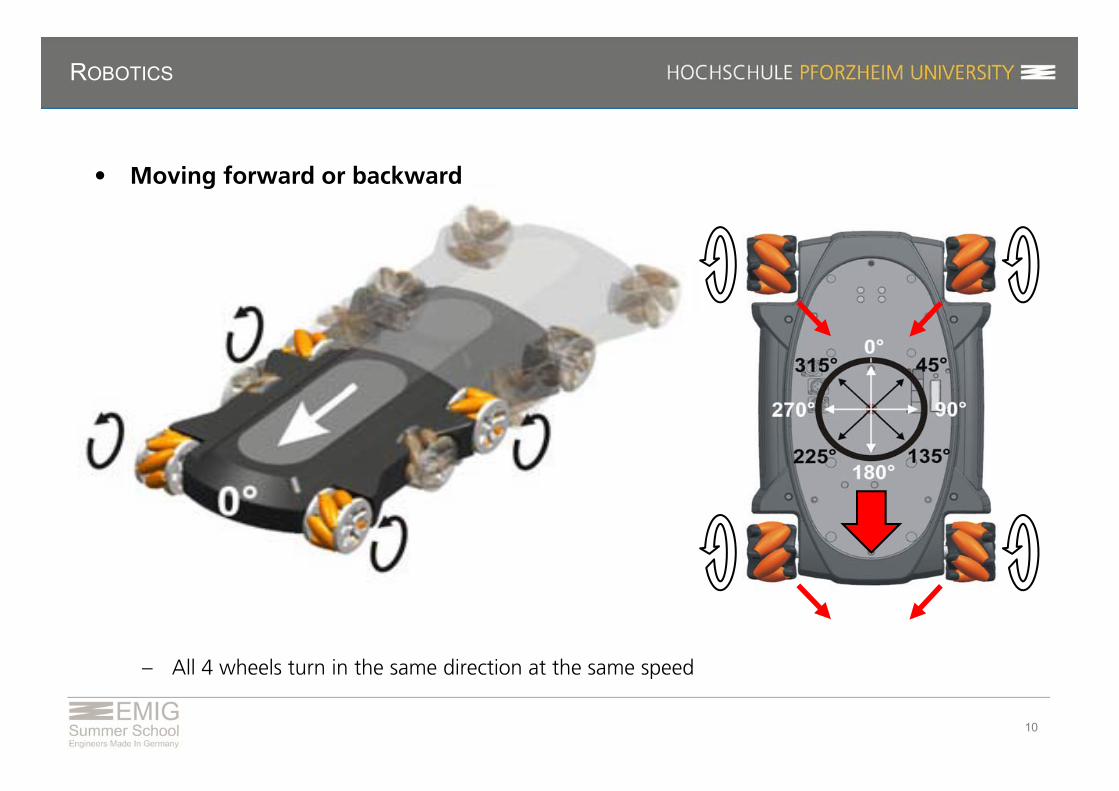
• Moving forward or backward
– All 4 wheels turn in the same direction at the same speed
ROBOTICS
11
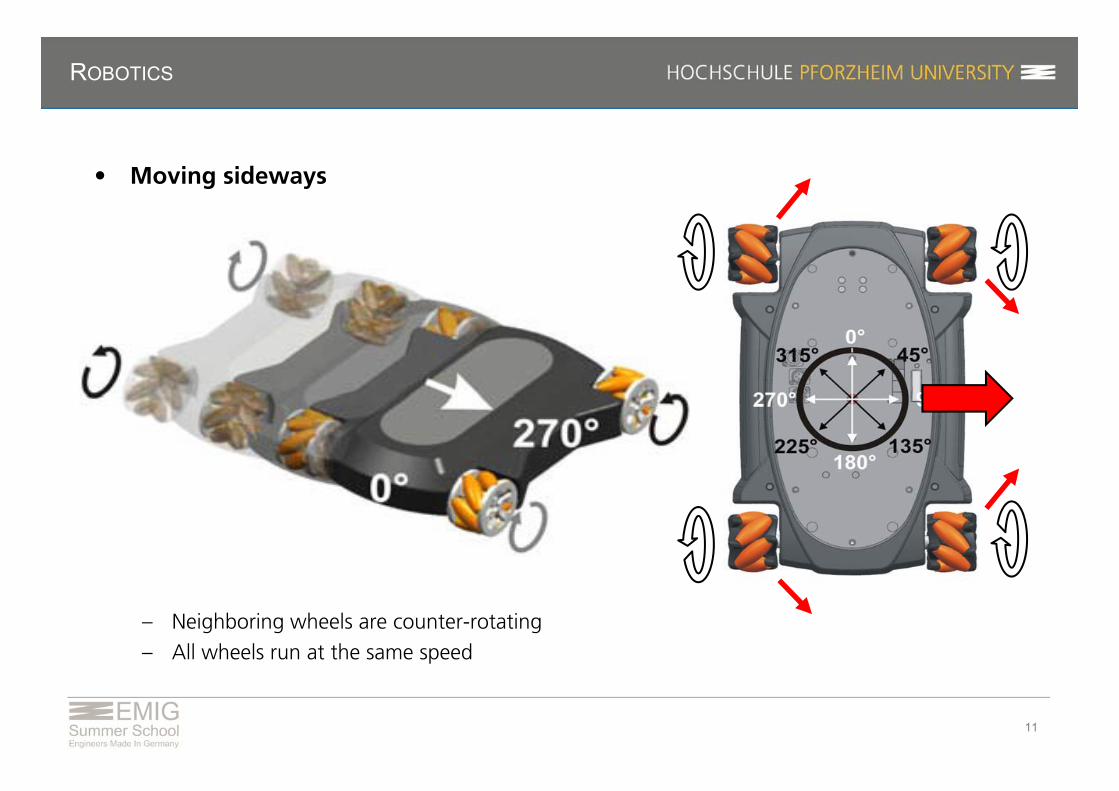
• Moving sideways
– Neighboring wheels are counter-rotating– All wheels run at the same speed
ROBOTICS
12
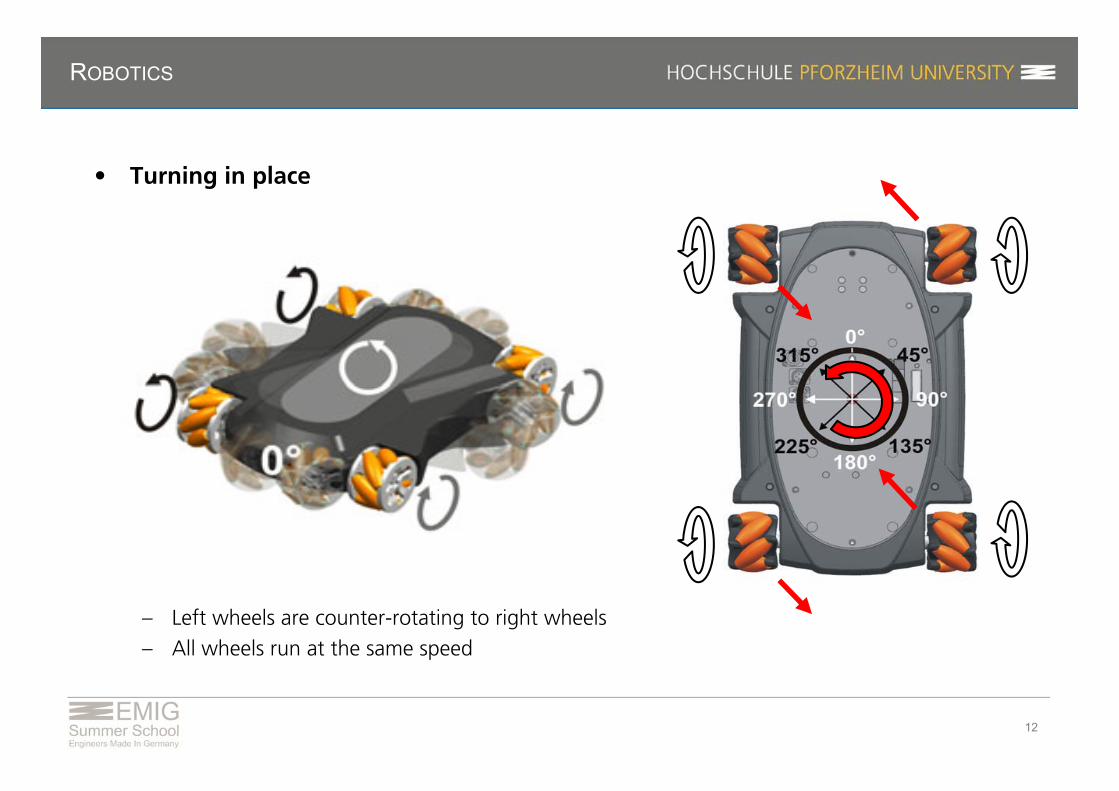
• Turning in place
– Left wheels are counter-rotating to right wheels– All wheels run at the same speed
ROBOTICS
13
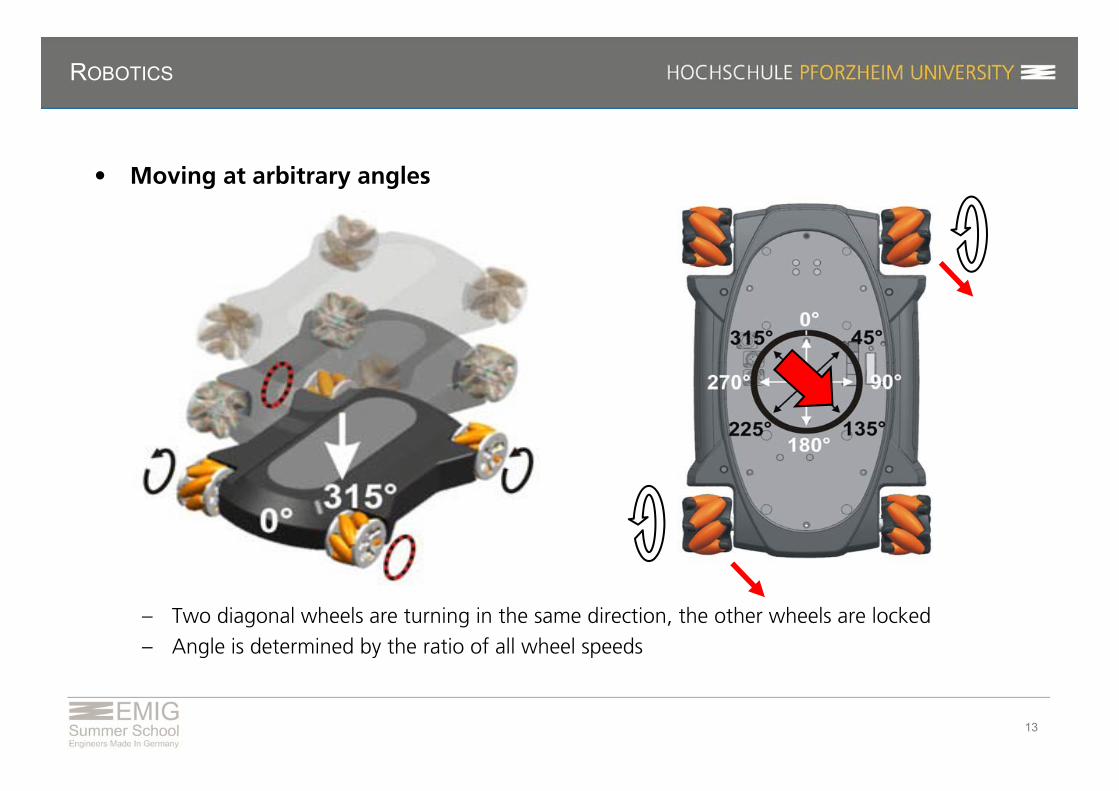
• Moving at arbitrary angles
– Two diagonal wheels are turning in the same direction, the other wheels are locked– Angle is determined by the ratio of all wheel speeds
ROBOTICS
14
ROBOTICS
Case Study – Mobile Robot Platform KUKA youBot
Case Study – Humanoid Robot NAO
Case Study – Cube Solving Robot
Algorithms
Flowcharts

ROBOTICS
15
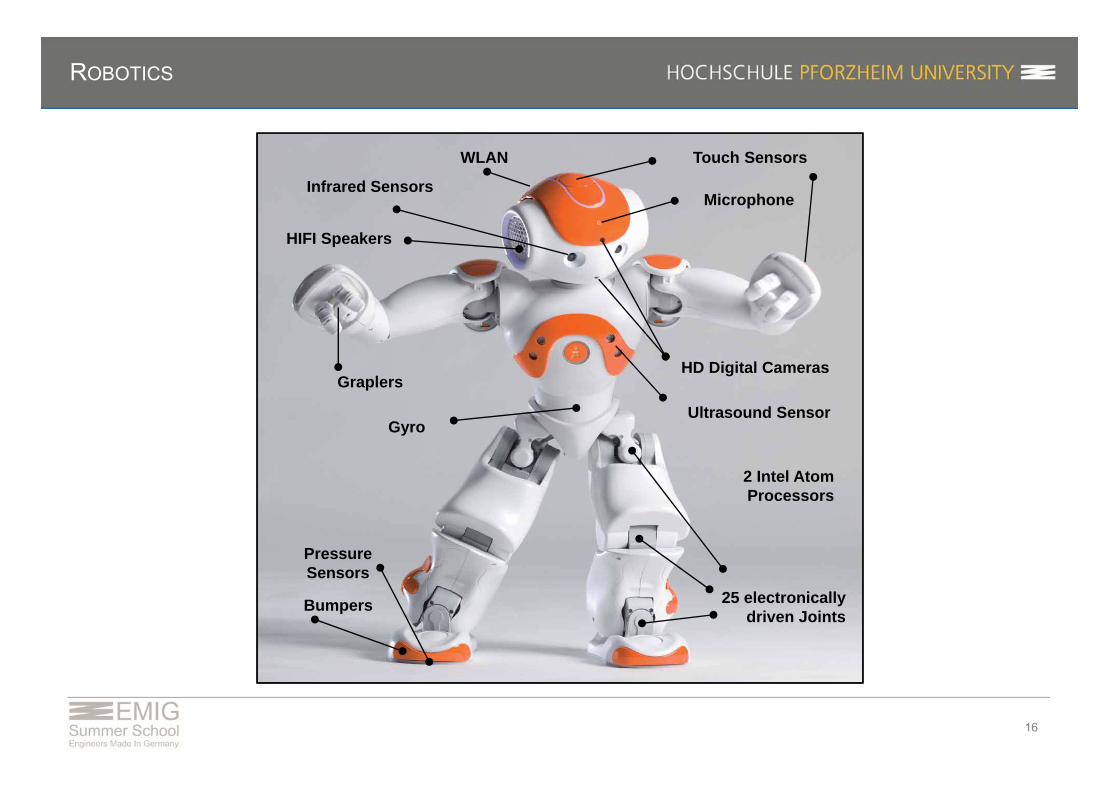
The NAO H25 V4 Robot
• Programable Humanoid Robot• 25 degrees of freedom• Lots of sensors and communication devices• Linux operating system• Manufactured by Aldebaran Robotics, Paris
– Start of development in 2006– First release version in 2008– V4 is the newest 2012 version
• Designed as an educational robotics systems• Used world-wide at universities and in research projects• Specialized in Man-Machine interaction• Own league in the Robot Soccer World Cup
ROBOTICS
16
Infrared Sensors
HIFI Speakers
Microphone
Touch Sensors
HD Digital Cameras
Ultrasound Sensor
Graplers
Gyro
PressureSensors
Bumpers 25 electronicallydriven Joints
2 Intel Atom Processors
WLAN
ROBOTICS
17
ROBOTICS
Case Study – Mobile Robot Platform KUKA youBot
Case Study – Humanoid Robot NAO
Case Study – Cube Solving Robot
Algorithms
Flowcharts
ROBOTICS
18
• Ernö Rubik– Hungarian designer an architect– Professor of Arts and Design at the University of Budapest
• Rubik‘s Cube– Invented in 1974– Means to train students in 3-dimensional thinking– World-wide commercial success from 1980 on
• Overall number of possible configurations:– 43.252.003.274.489.856.000 (ca. 43 * 1018)
• Overall number of humans who despaired:– Significantly higher…
ROBOTICS
19
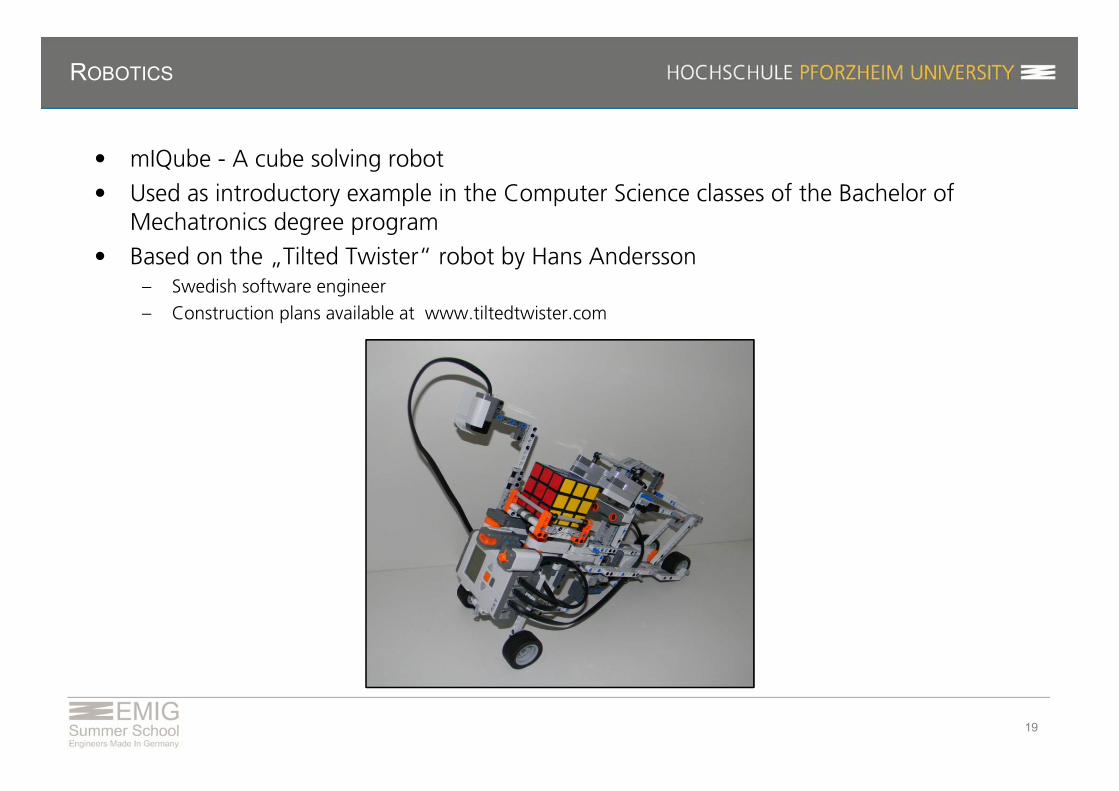
• mIQube - A cube solving robot• Used as introductory example in the Computer Science classes of the Bachelor of
Mechatronics degree program• Based on the „Tilted Twister“ robot by Hans Andersson
– Swedish software engineer– Construction plans available at www.tiltedtwister.com

ROBOTICS
20
Color Sensor
DistanceSensor
3 Electric Motors
Turntable
Microcontroller
Grappler
ROBOTICS
21
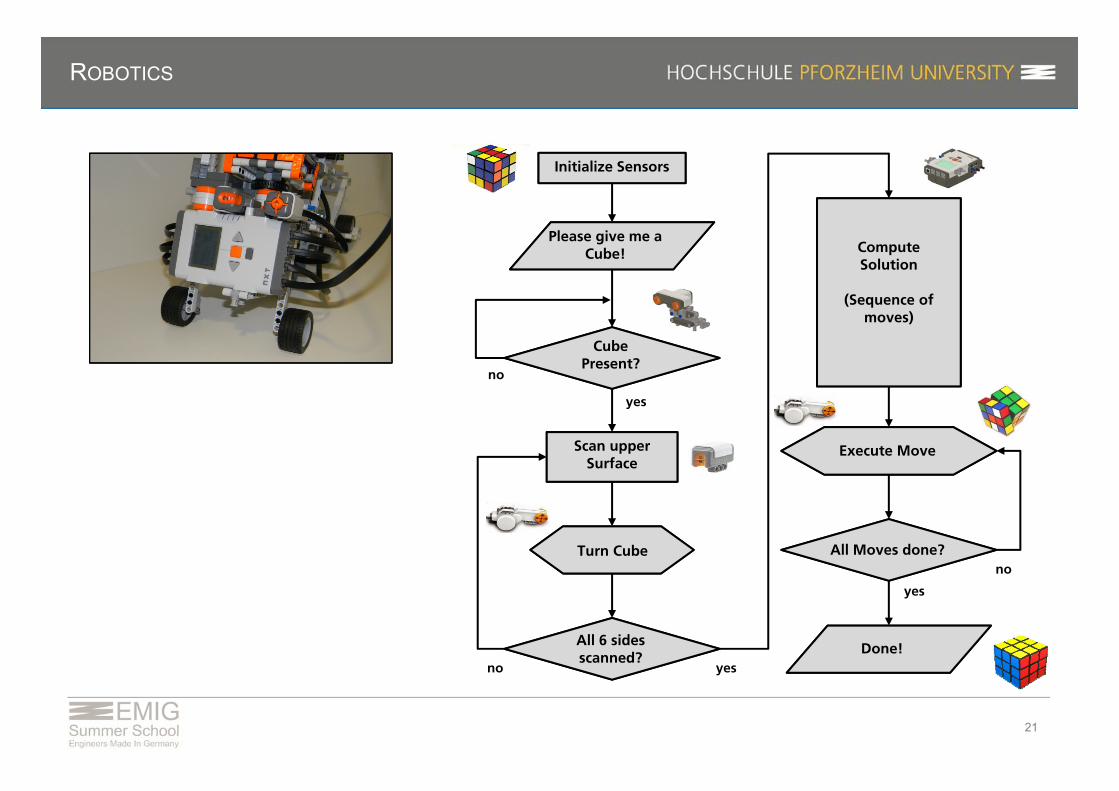
Scan upperSurface
Initialize Sensors
Please give me a Cube!
CubePresent?
yes
no
All 6 sidesscanned?
Turn Cube
no
ComputeSolution
(Sequence ofmoves)
All Moves done?
Execute Move
yes
Done!
no
yes
ROBOTICS
22
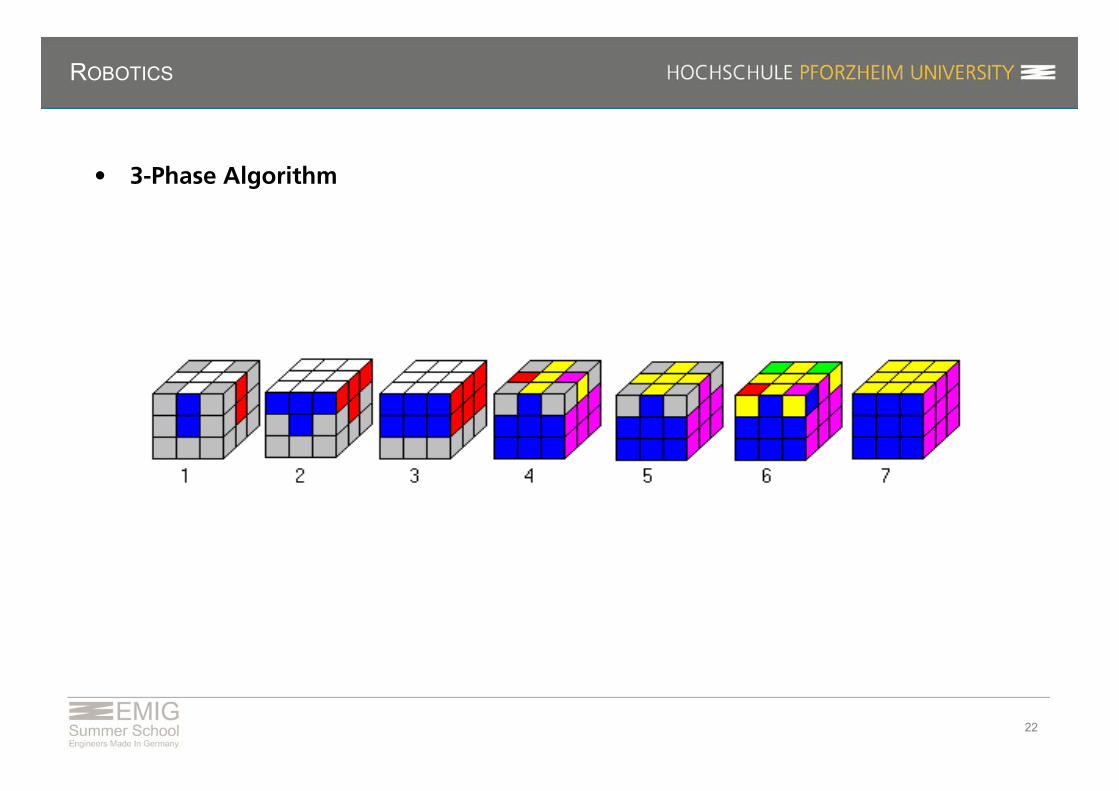
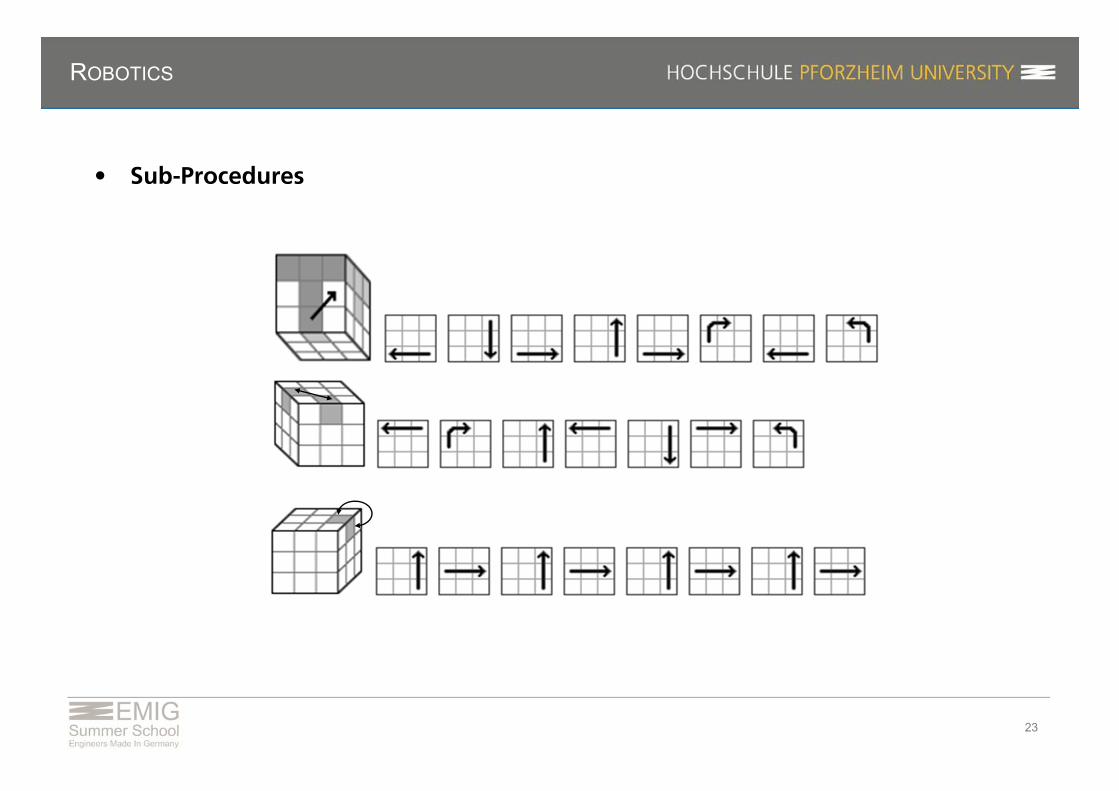
• 3-Phase Algorithm
ROBOTICS
23
• Sub-Procedures
ROBOTICS
24
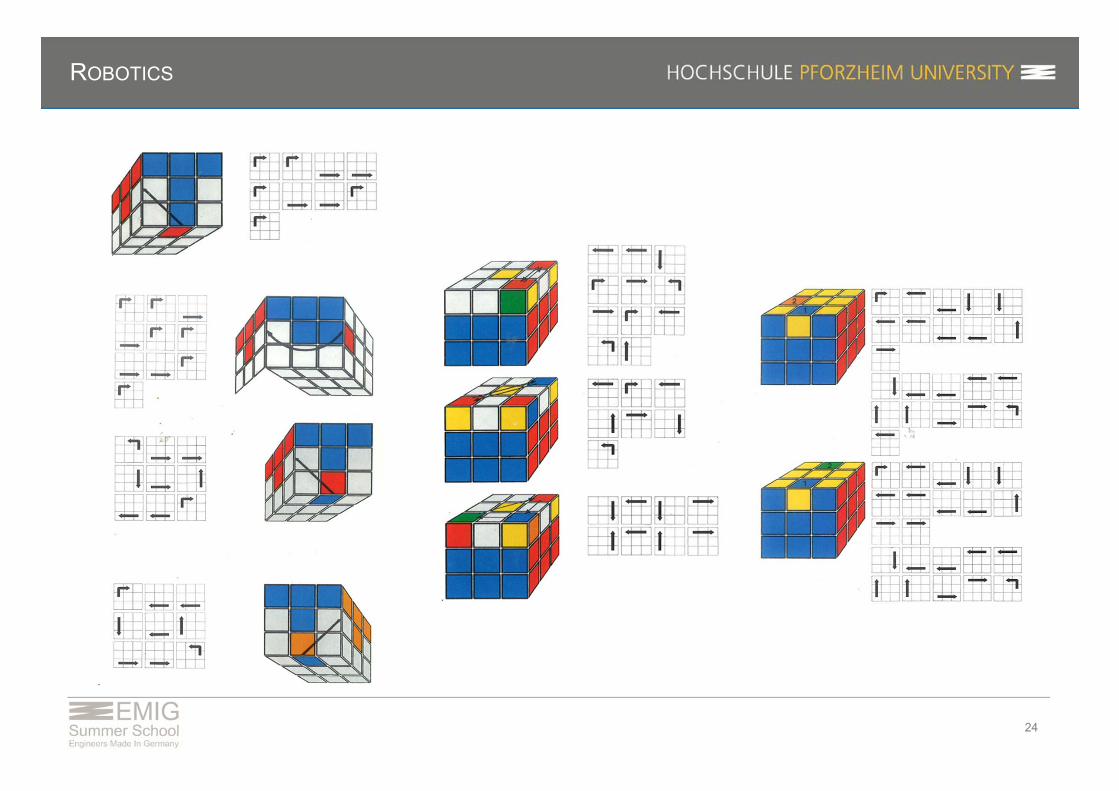
Quelle: Tom Werneck, der Zaubercube, Heyne
ROBOTICS
25
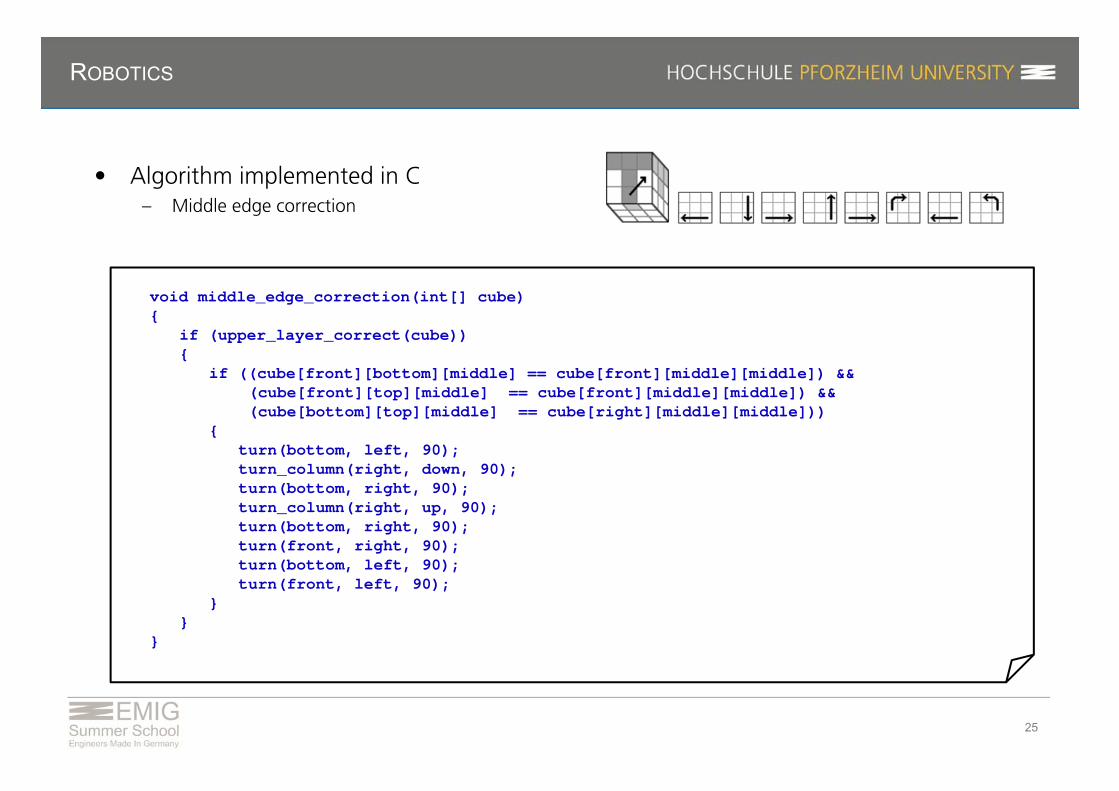
• Algorithm implemented in C– Middle edge correction
void middle_edge_correction(int[] cube){
if (upper_layer_correct(cube)){
if ((cube[front][bottom][middle] == cube[front][middle][middle]) &&(cube[front][top][middle] == cube[front][middle][middle]) &&(cube[bottom][top][middle] == cube[right][middle][middle]))
{turn(bottom, left, 90);turn_column(right, down, 90);turn(bottom, right, 90);turn_column(right, up, 90);turn(bottom, right, 90);turn(front, right, 90);turn(bottom, left, 90);turn(front, left, 90);
}}
}
ROBOTICS
26
• God‘s Algorithm– For each configuration, compute a solution of minimum length
• God‘s Number– Maximum number of moves that is sufficient for solving the cube from
an arbitrary starting configuration
ROBOTICS
27
ROBOTICS
Case Study – Mobile Robot Platform KUKA youBot
Case Study – Humanoid Robot NAO
Case Study – Cube Solving Robot
Algorithms
Flowcharts
ROBOTICS
28
ROBOTICS
Algorithms
• Definition– An algorithm is an effective method for solving a specific problem, described by a finite set
of step-by-step operations to be performed.
• Essential Building Blocks of Algorithms– Sequences of Instructions
• Order is well defined– Branching Points
• Depending on the evaluation of a test condition different branches of instruction sequences aretakewn
– Conditional Loops• Conditional repetition of sequences of instructions
• Programming Language– A means to specify an algorithm in a way that it can be understood and executed by a
machine or computer
ROBOTICS
29
ROBOTICS
Abu truefar Mohammed Ibn Musa Al-Khwarizmi
• Ca. 780 – 850 n. Chr.• Born presumably in the Persian town Khwarizm (now in
Usbekistan)• Scientist at the courtyard of caliph Harun al-Raschid in
Bagdad• Adoption of the East Indian numeral system (arabic
numerals)• Introduction of decimal notation of numbers• First usage of zero as a digit• „as-sifr“ (die Leere) („zero“, „chiffre“, „Ziffer“)• Most famous book: „Al Kitab al-muhtasar fi hisab al-gabr
w-almuqabala“• „A short book on computing by completion and
balancing“• Methods to solve linear and quadratic equations• „Al-gabr“, „to add sth., to complete sth.“, „Algebra“
ROBOTICS
30
ROBOTICS
Variables in Algorithms
• Variable– symbolic storage (memory) of a specific value– has a name (unique Identifier)– has a current value (can change over time)
• Read / Write access– current value can be obtained (read)– current value can be replaced by a new value (write)
• Mathematics vs. Computer Science– in math x = x + 1 is an equation without a solution– in a program x = x + 1is an assignment (value update), meaning „the new value of x is
the sum of its old value and 1
x
8

ROBOTICS
31
ROBOTICS
Case Study – Mobile Robot Platform KUKA youBot
Case Study – Humanoid Robot NAO
Case Study – Cube Solving Robot
Algorithms
Flowcharts
ROBOTICS
32
ROBOTICS
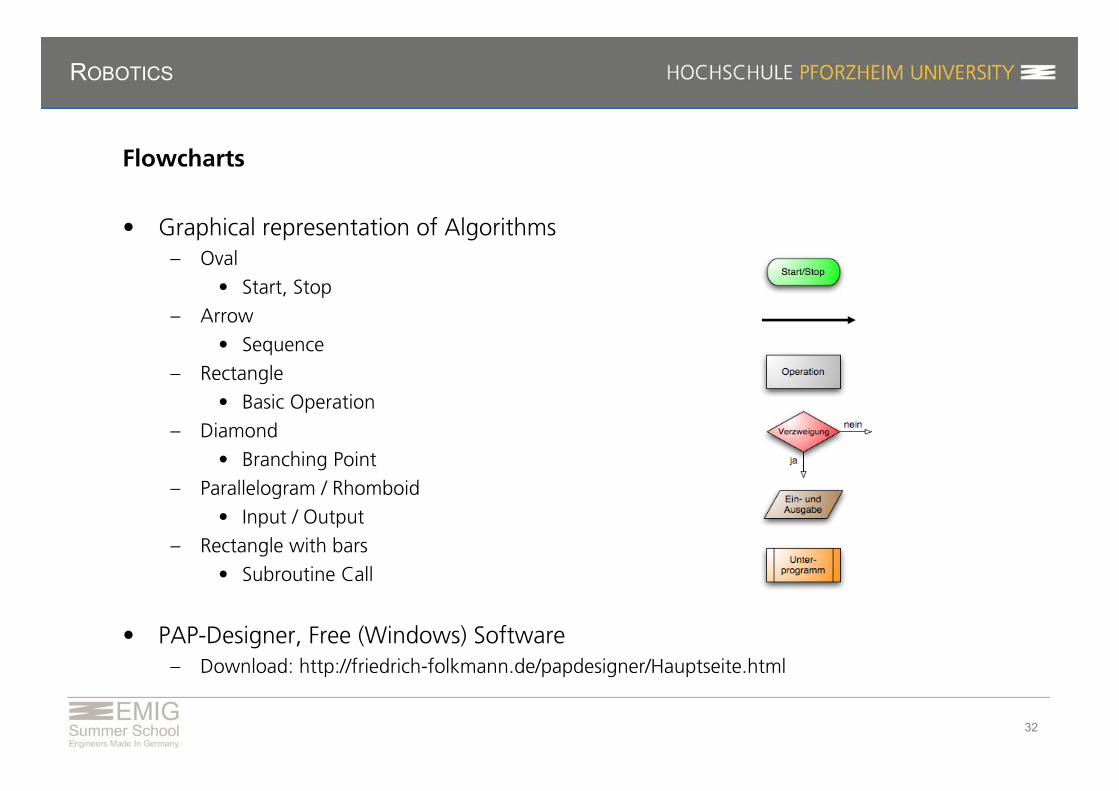
Flowcharts
• Graphical representation of Algorithms– Oval
• Start, Stop– Arrow
• Sequence– Rectangle
• Basic Operation– Diamond
• Branching Point– Parallelogram / Rhomboid
• Input / Output– Rectangle with bars
• Subroutine Call
• PAP-Designer, Free (Windows) Software– Download: http://friedrich-folkmann.de/papdesigner/Hauptseite.html
ROBOTICS
33
ROBOTICS
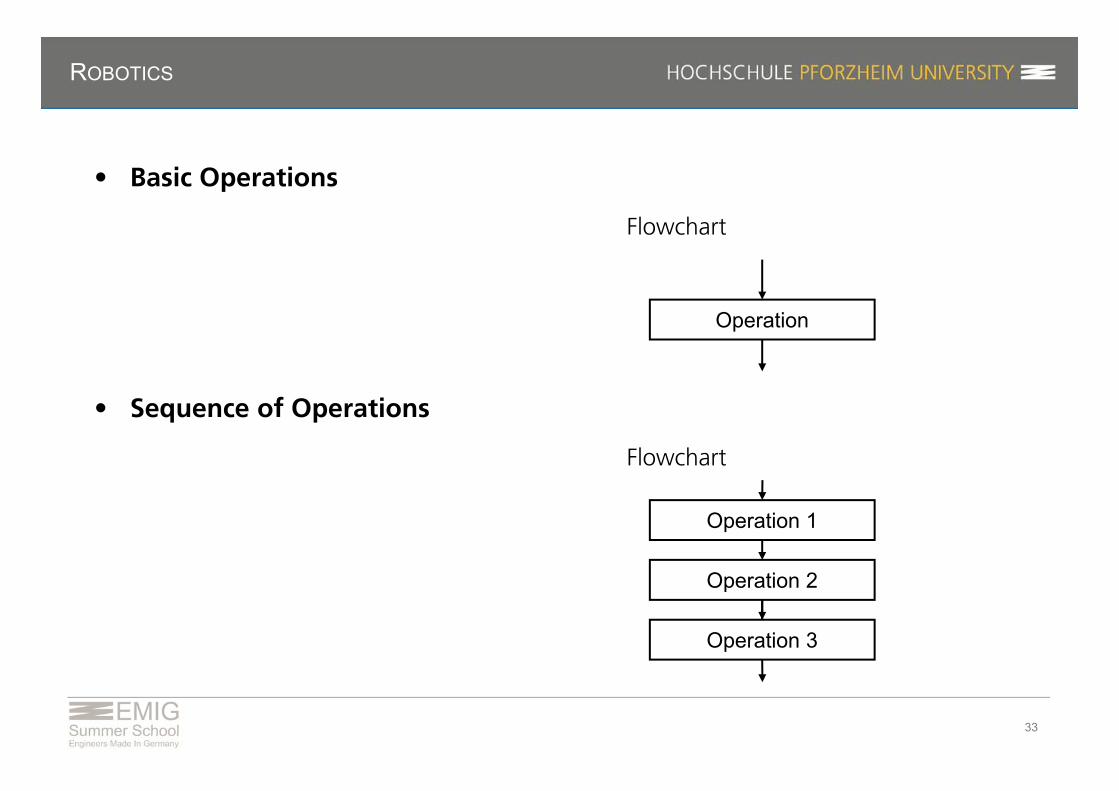
• Basic Operations
• Sequence of Operations
Flowchart
Flowchart
Operation
Operation 1
Operation 3
Operation 2
ROBOTICS
34
ROBOTICS
Flowchart
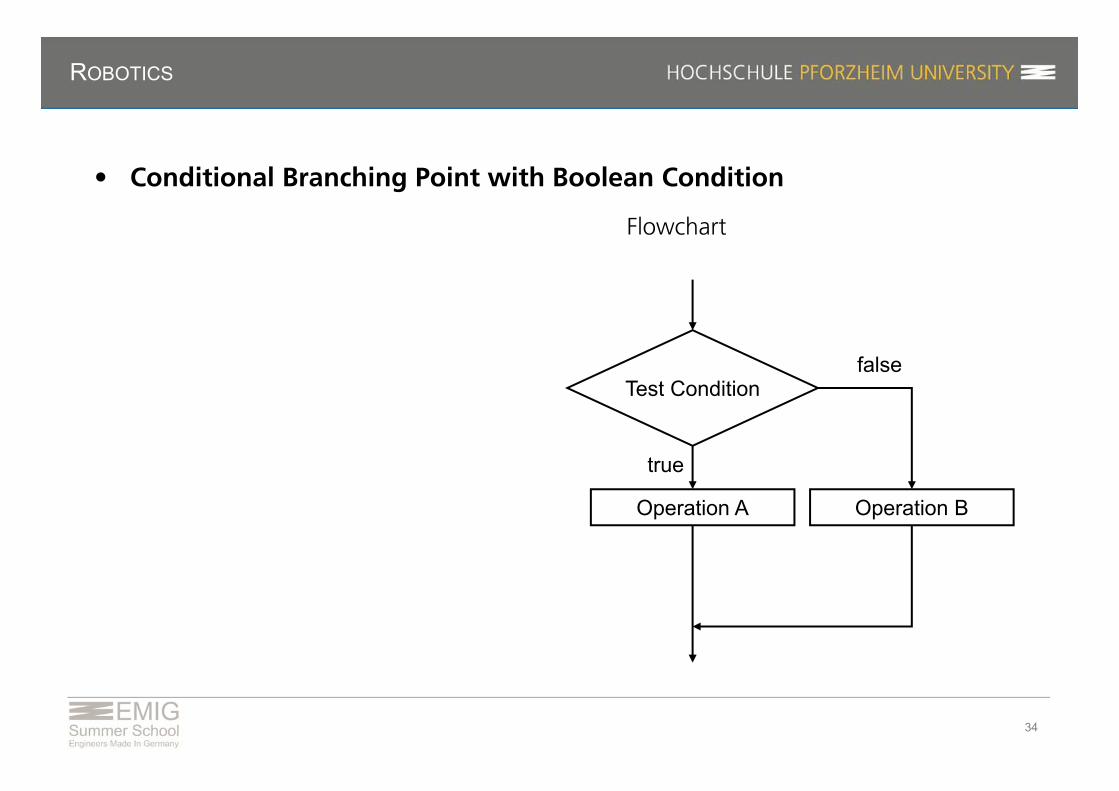
• Conditional Branching Point with Boolean Condition
Test Condition
Operation A Operation B
false
true
ROBOTICS
35
ROBOTICS
Flowchart
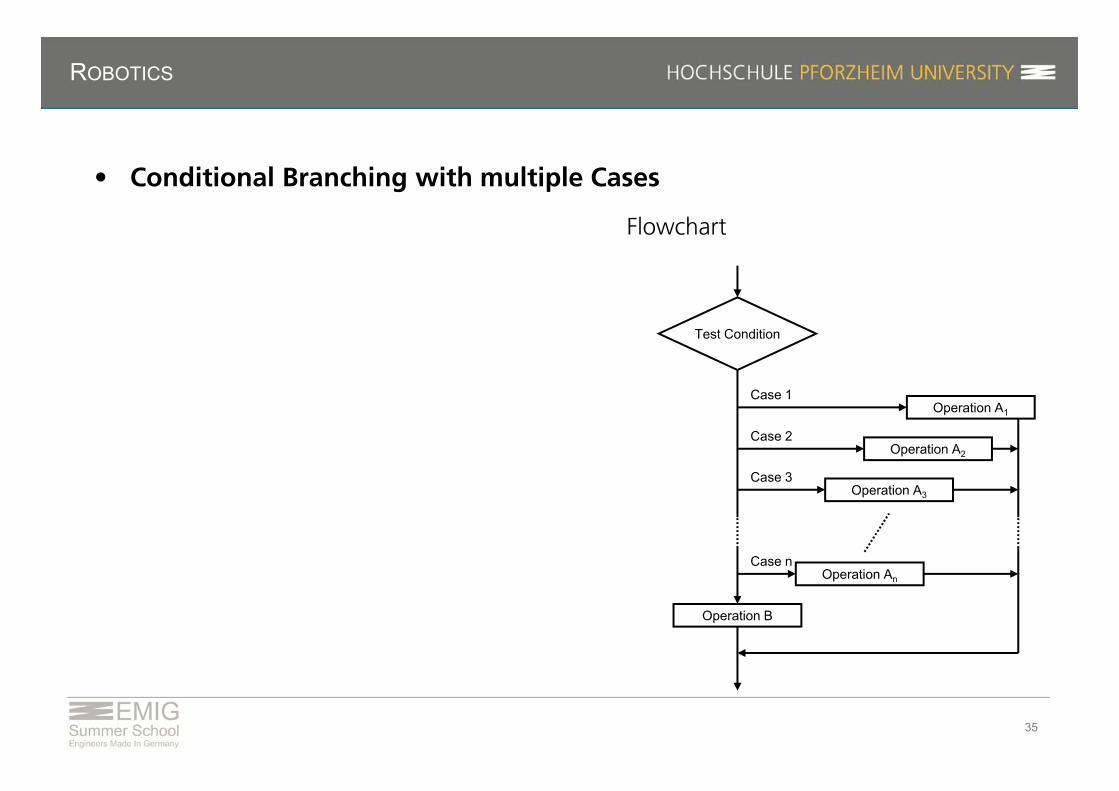
• Conditional Branching with multiple Cases
Test Condition
Operation B
Operation A1
Case 1
Operation A2
Operation An
Operation A3
Case 2
Case 3
Case n
ROBOTICS
36
ROBOTICS
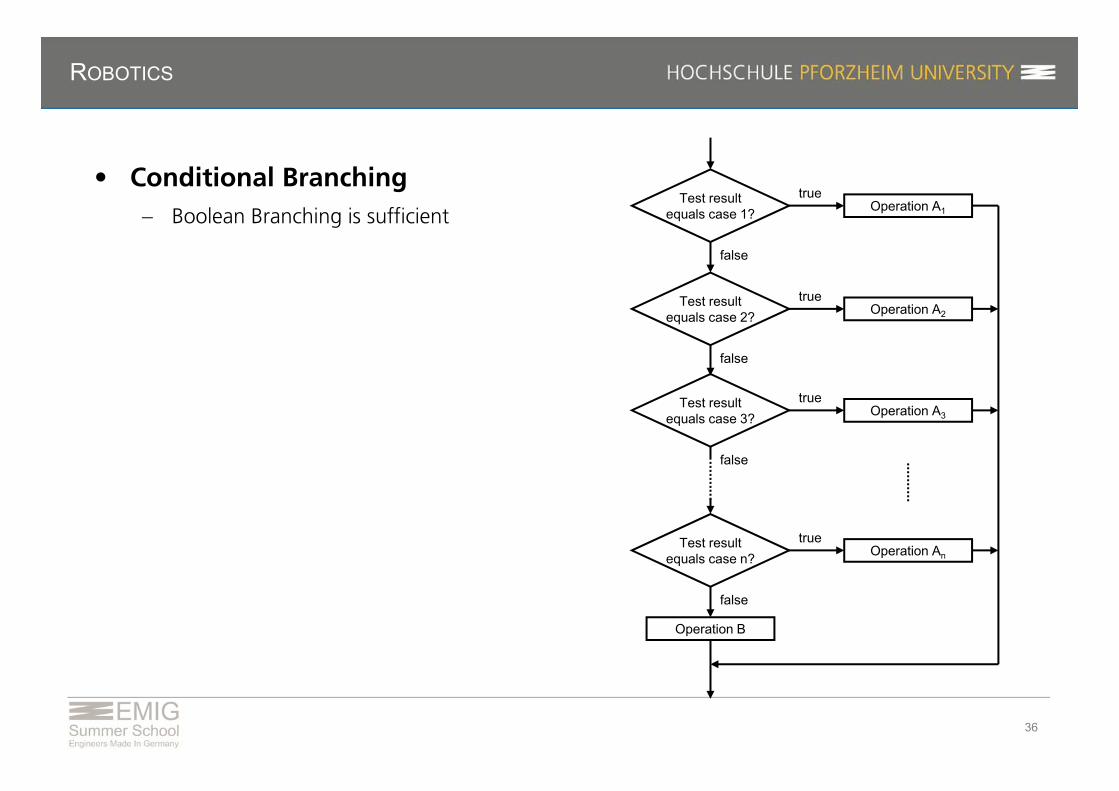
• Conditional Branching Boolean Branching is sufficient
Operation B
Test resultequals case 1? Operation A1
true
false
Test resultequals case 2? Operation A2
true
false
Test resultequals case 3? Operation A3
true
false
Test resultequals case n? Operation An
true
false
ROBOTICS
37
ROBOTICS
Flowchart
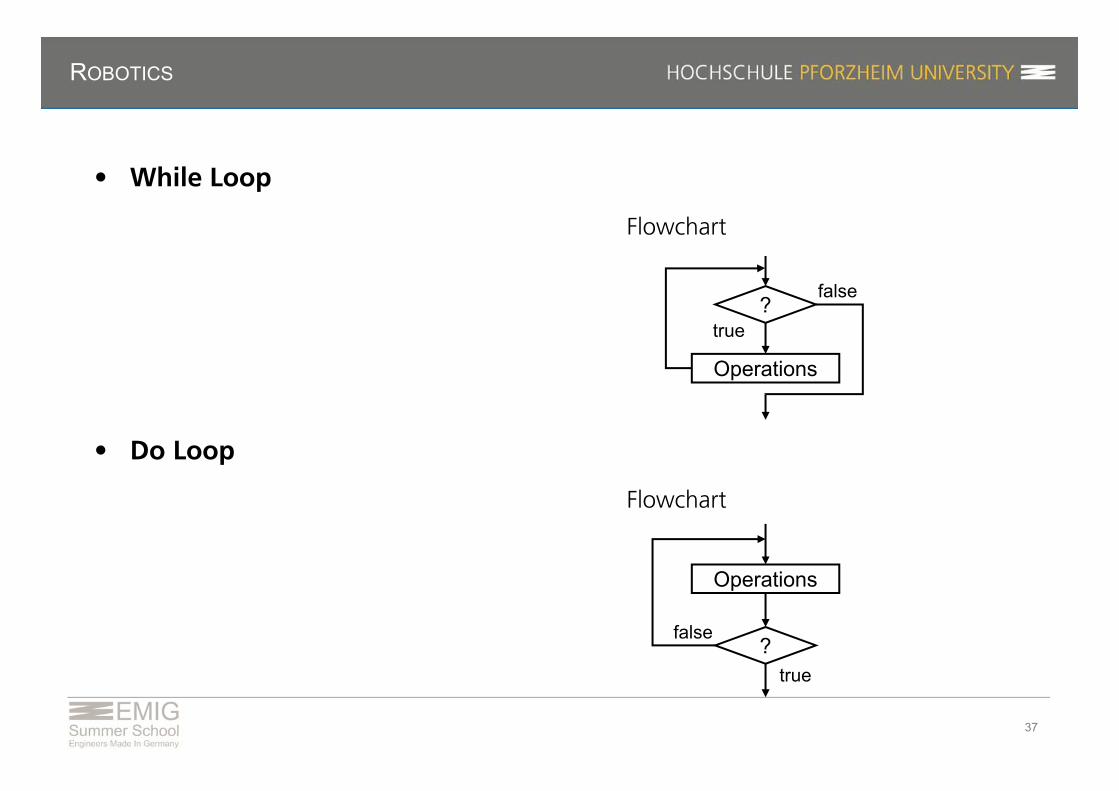
• While Loop
Flowchart
• Do Loop
?
Operations
false
true
?
Operations
false
true
ROBOTICS
38
ROBOTICS
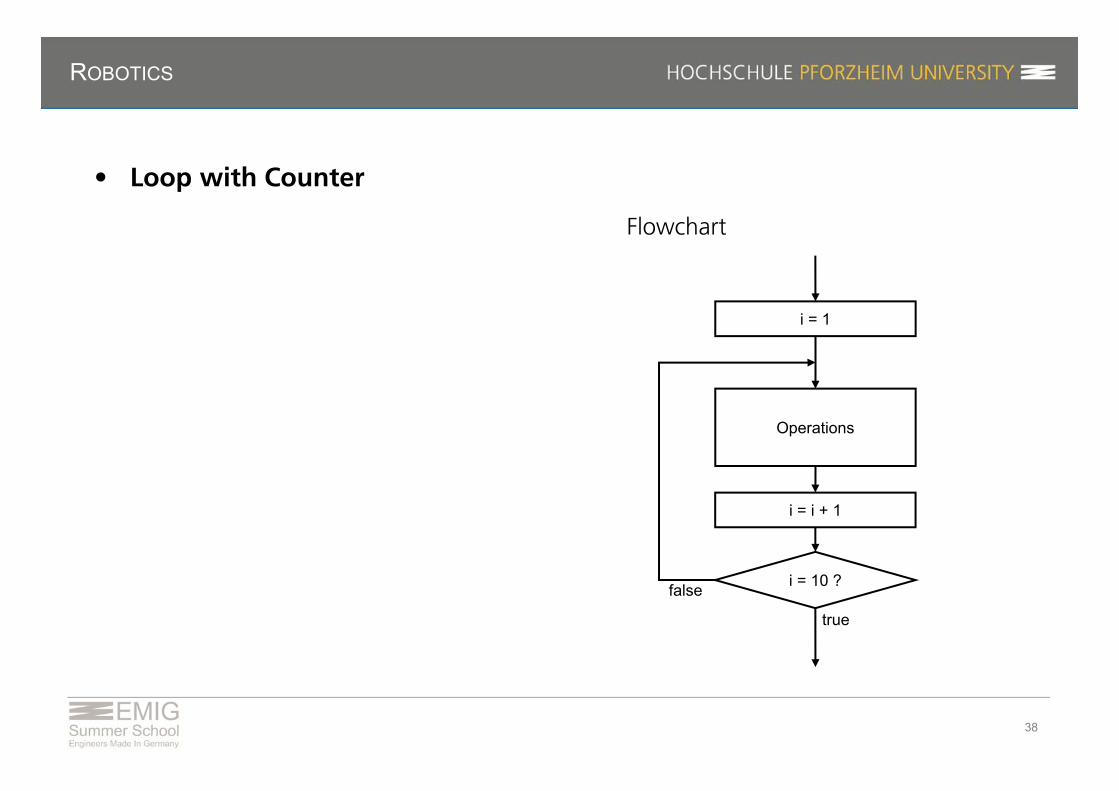
• Loop with Counter
i = 10 ?
Operations
false
true
i = 1
i = i + 1
Flowchart
ROBOTICS
39
ROBOTICS
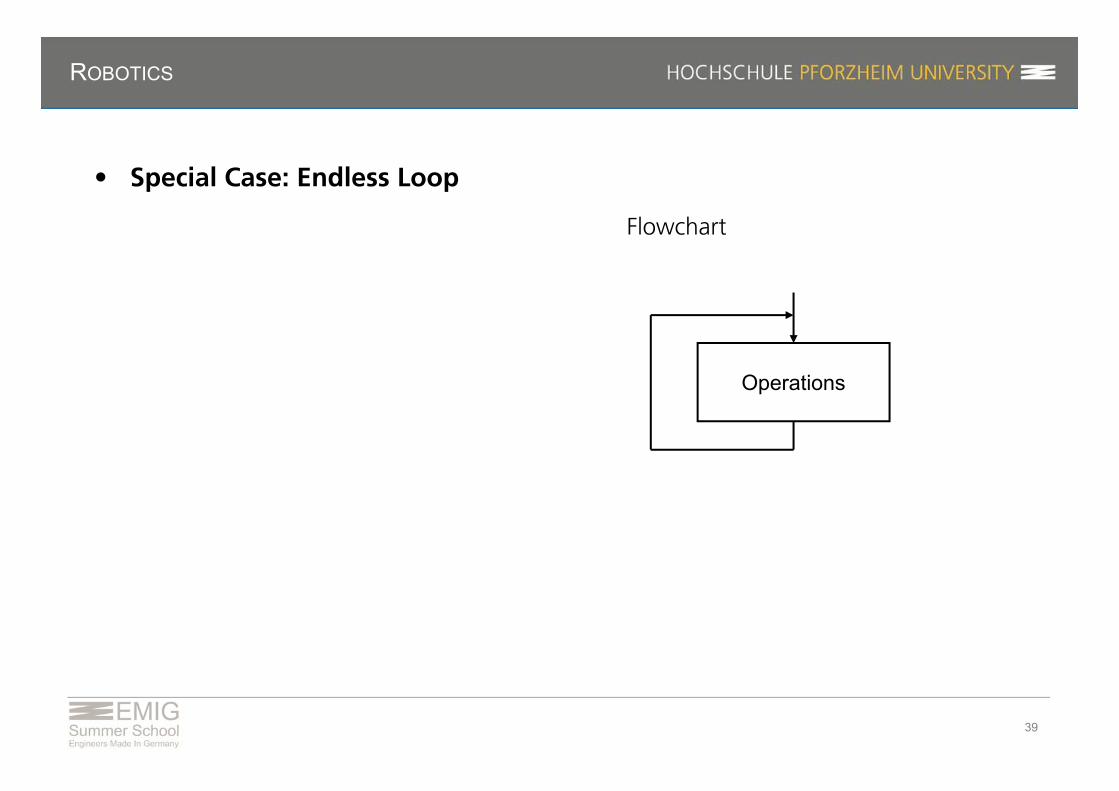
Flowchart
• Special Case: Endless Loop
Operations
ROBOTICS
40
ROBOTICS
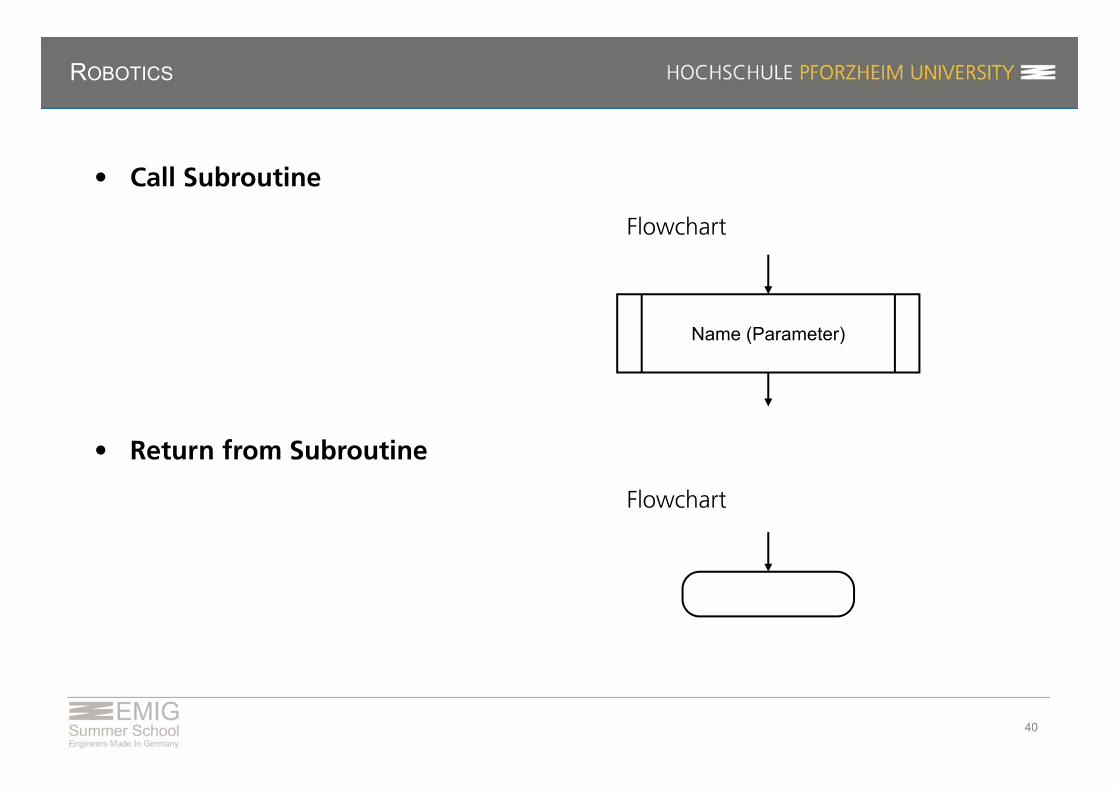
Flowchart
• Call Subroutine
Flowchart
• Return from Subroutine
Name (Parameter)
ROBOTICS
41
ROBOTICS
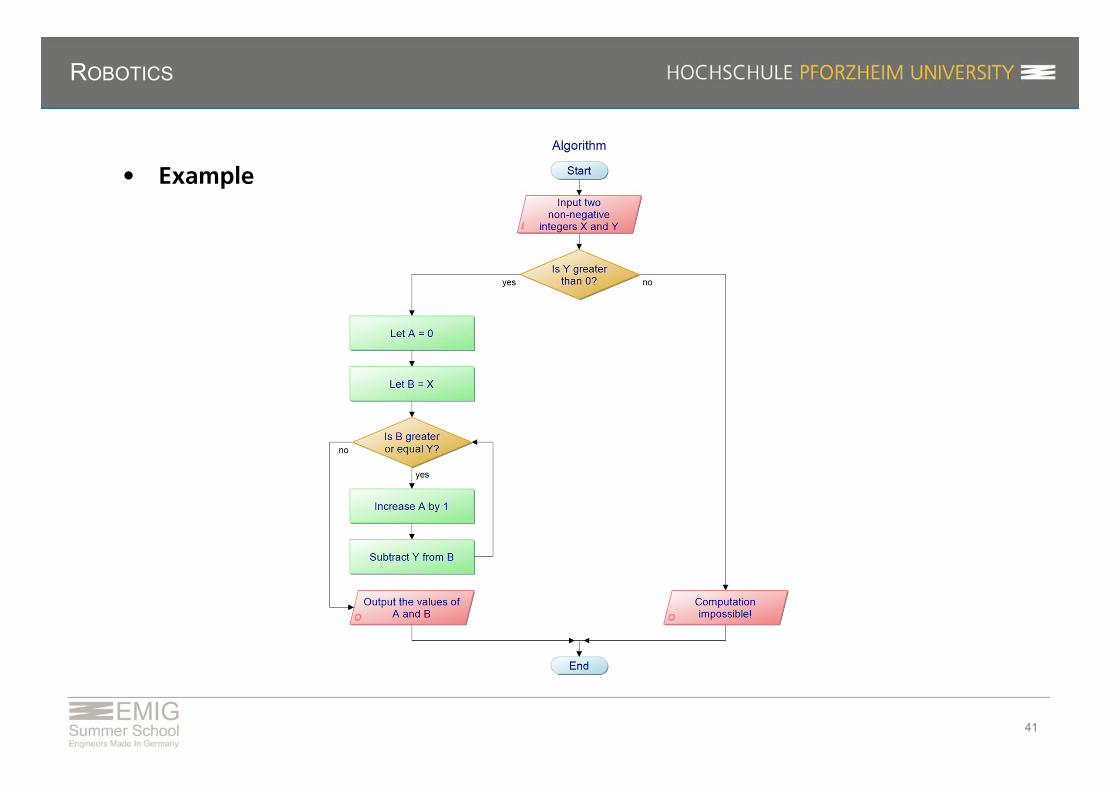
• Example
ROBOTICS
42
ROBOTICS
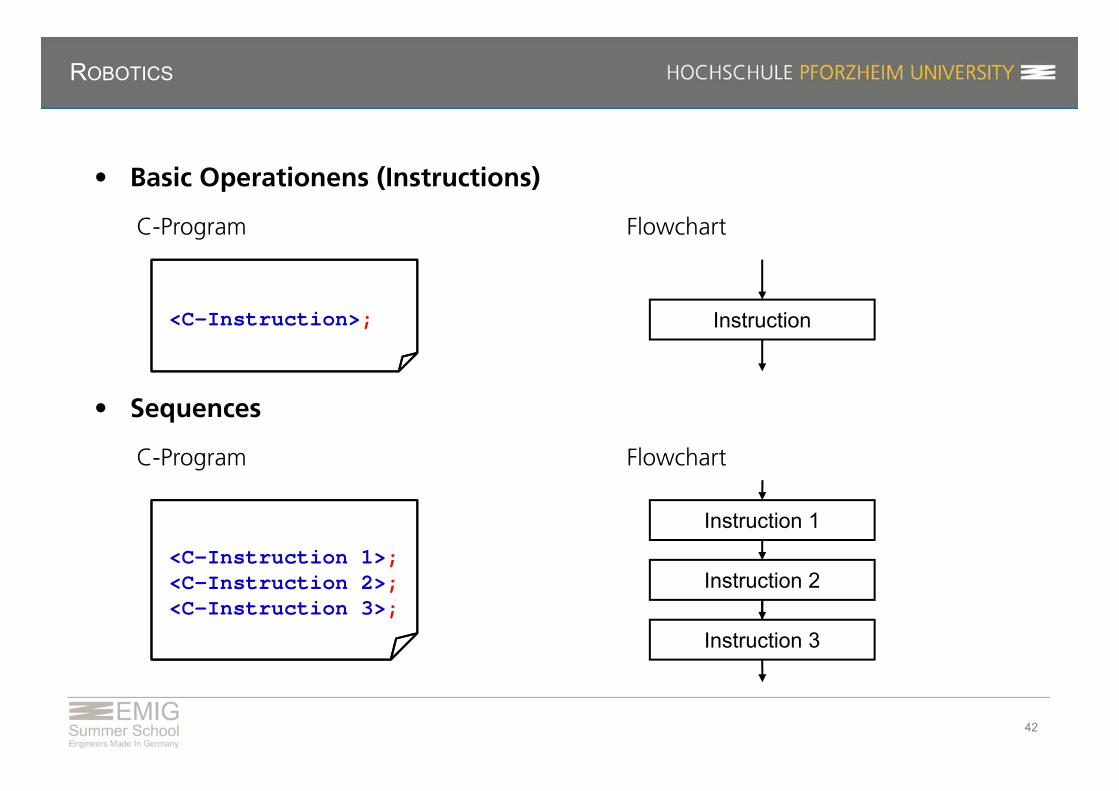
C-Program Flowchart
• Basic Operationens (Instructions)
C-Program Flowchart
• Sequences
Instruction
Instruction 1
Instruction 3
Instruction 2
<C-Instruction>;
<C-Instruction 1>;<C-Instruction 2>;<C-Instruction 3>;
ROBOTICS
43
ROBOTICS
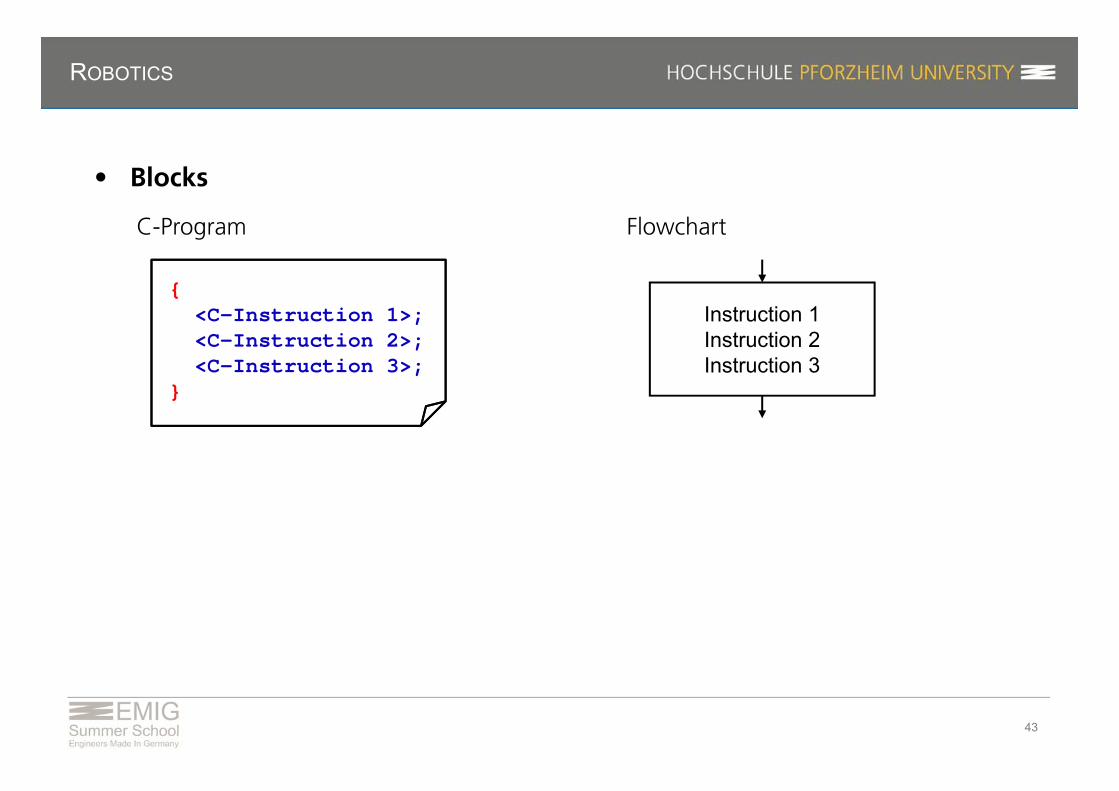
C-Program Flowchart
• Blocks
Instruction 1Instruction 2Instruction 3
{<C-Instruction 1>;<C-Instruction 2>;<C-Instruction 3>;
}
ROBOTICS
44
ROBOTICS
Flowchart
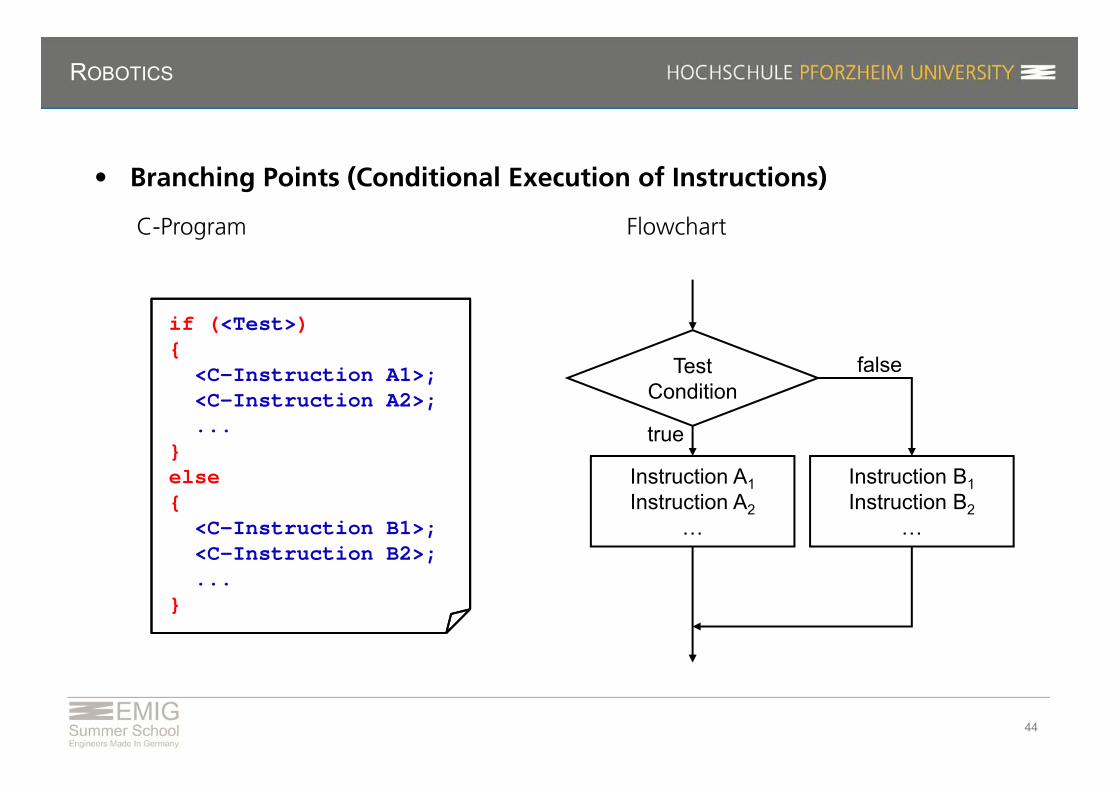
• Branching Points (Conditional Execution of Instructions)
TestCondition
Instruction A1Instruction A2
…
Instruction B1Instruction B2
…
false
true
C-Program
if (<Test>){<C-Instruction A1>;<C-Instruction A2>;...
}else{<C-Instruction B1>;<C-Instruction B2>;...
}
ROBOTICS
45
ROBOTICS
Flowchart
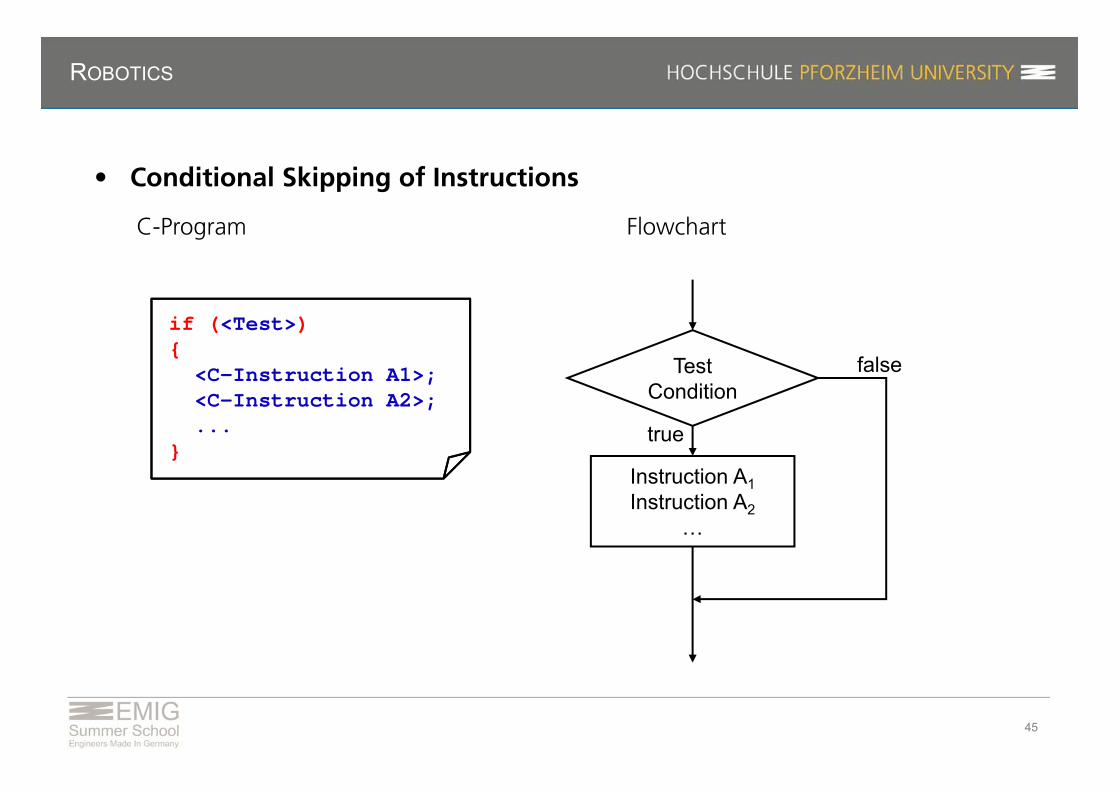
• Conditional Skipping of Instructions
TestCondition
Instruction A1Instruction A2
…
false
true
C-Program
if (<Test>){<C-Instruction A1>;<C-Instruction A2>;...
}
ROBOTICS
46
ROBOTICS
Flowchart
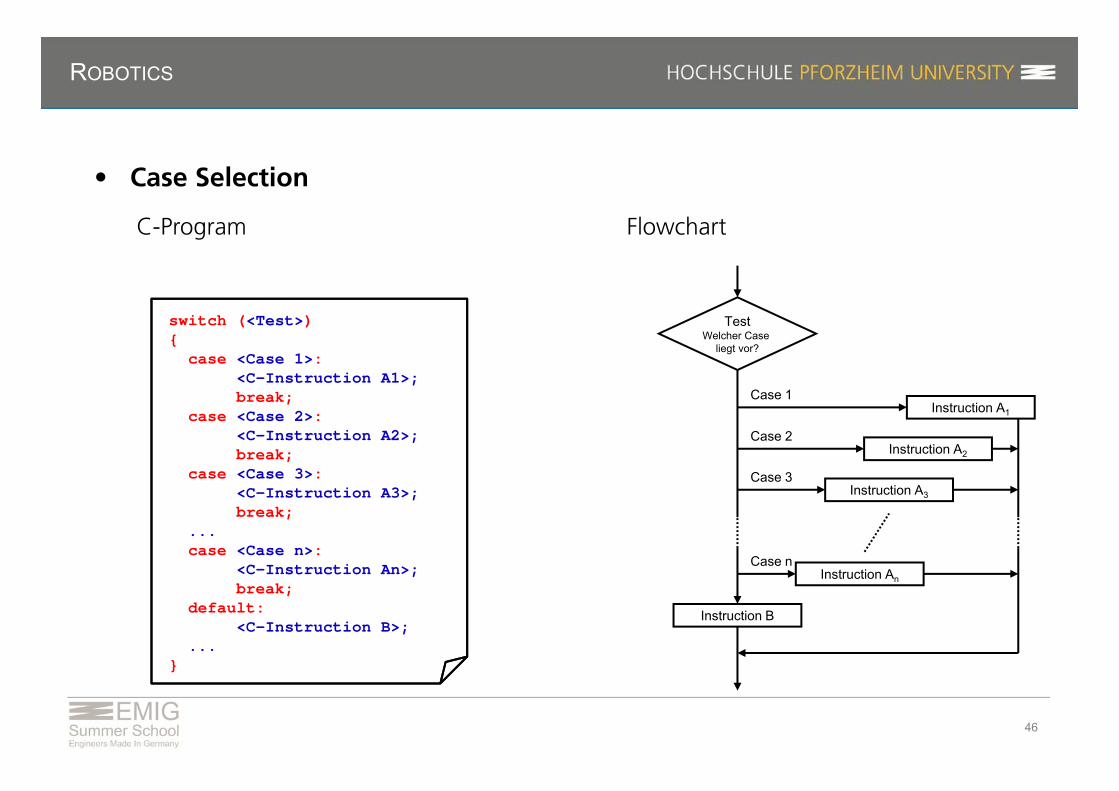
• Case Selection
TestWelcher Case
liegt vor?
Instruction B
Instruction A1
Case 1
Instruction A2
Instruction An
Instruction A3
Case 2
Case 3
Case n
C-Program
switch (<Test>){
case <Case 1>:<C-Instruction A1>;break;
case <Case 2>:<C-Instruction A2>;break;
case <Case 3>:<C-Instruction A3>;break;
...case <Case n>:
<C-Instruction An>;break;
default:<C-Instruction B>;
...}

ROBOTICS
47
ROBOTICS
• Case Selection Binary Branching Points are always sufficient
Instruction B
Test resultequals Case 1? Instruction A1
true
false
Test resultequals Case 2? Instruction A2
true
false
Test resultequals Case 3? Instruction A3
true
false
Test resultequals Case n? Instruction An
true
false
if (<TestTest = Case 1>){<C-Instruction A1>;
}else if (<TestTest = Case 2>){<C-Instruction A2>;
}else if (<TestTest = Case 3>){<C-Instruction A3>;
}else if (<...>){
...
}else{<C-Instruction B>;
}
ROBOTICS
48
ROBOTICS
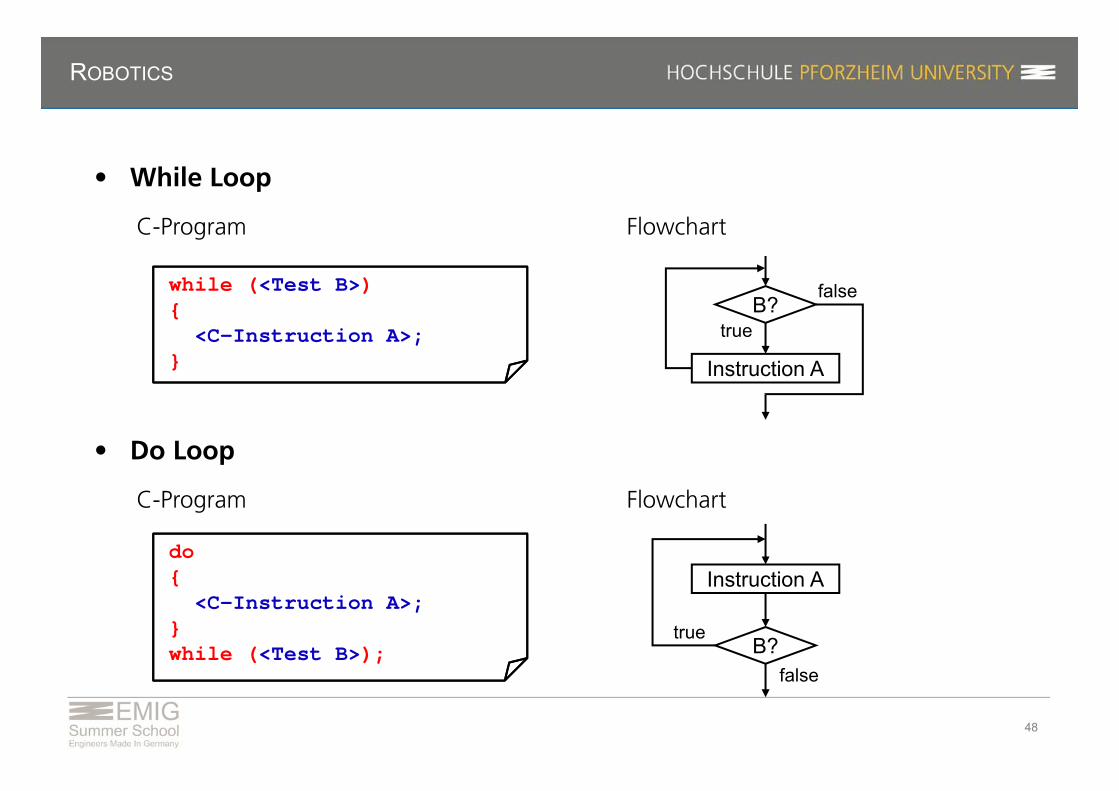
Flowchart
• While Loop
Flowchart
• Do Loop
B?
Instruction A
false
true
B?
Instruction A
true
false
C-Program
C-Program
while (<Test B>){<C-Instruction A>;
}
do {<C-Instruction A>;
}while (<Test B>);
ROBOTICS
49
ROBOTICS
Flowchart
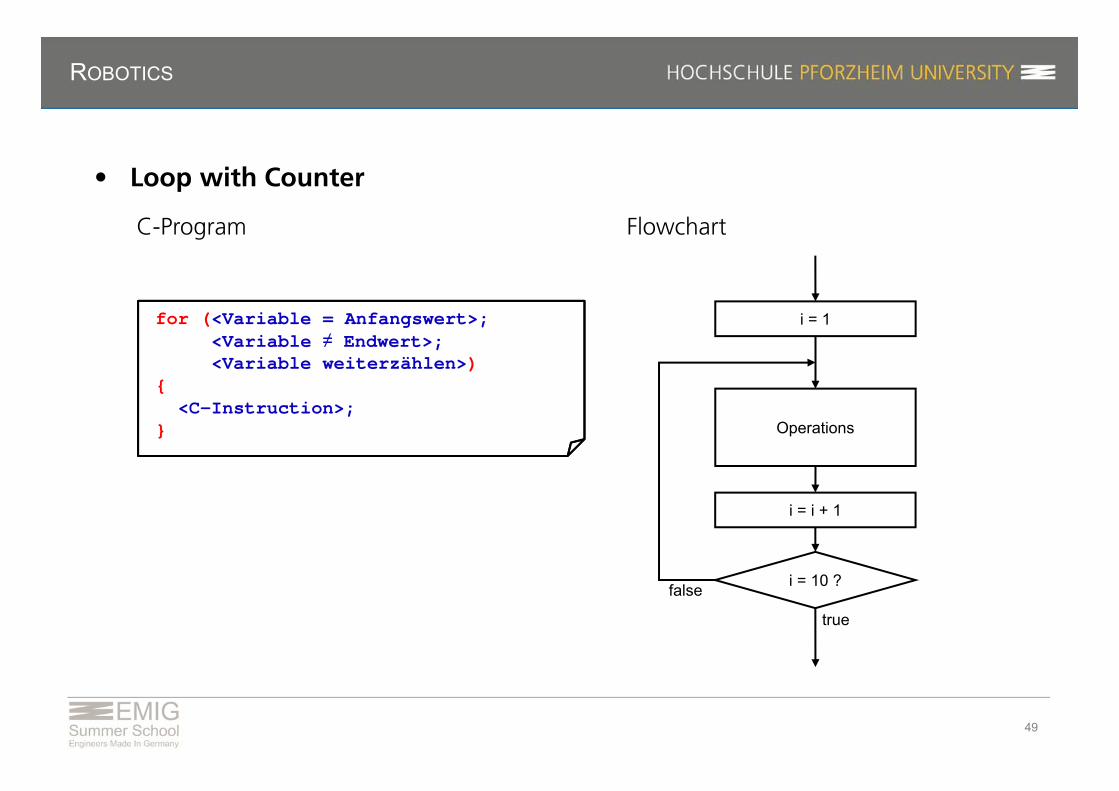
• Loop with Counter
C-Program
for (<Variable = Anfangswert>;<Variable ≠ Endwert>;<Variable weiterzählen>)
{<C-Instruction>;
}
i = 10 ?
Operations
false
true
i = 1
i = i + 1
ROBOTICS
50
ROBOTICS
Flowchart
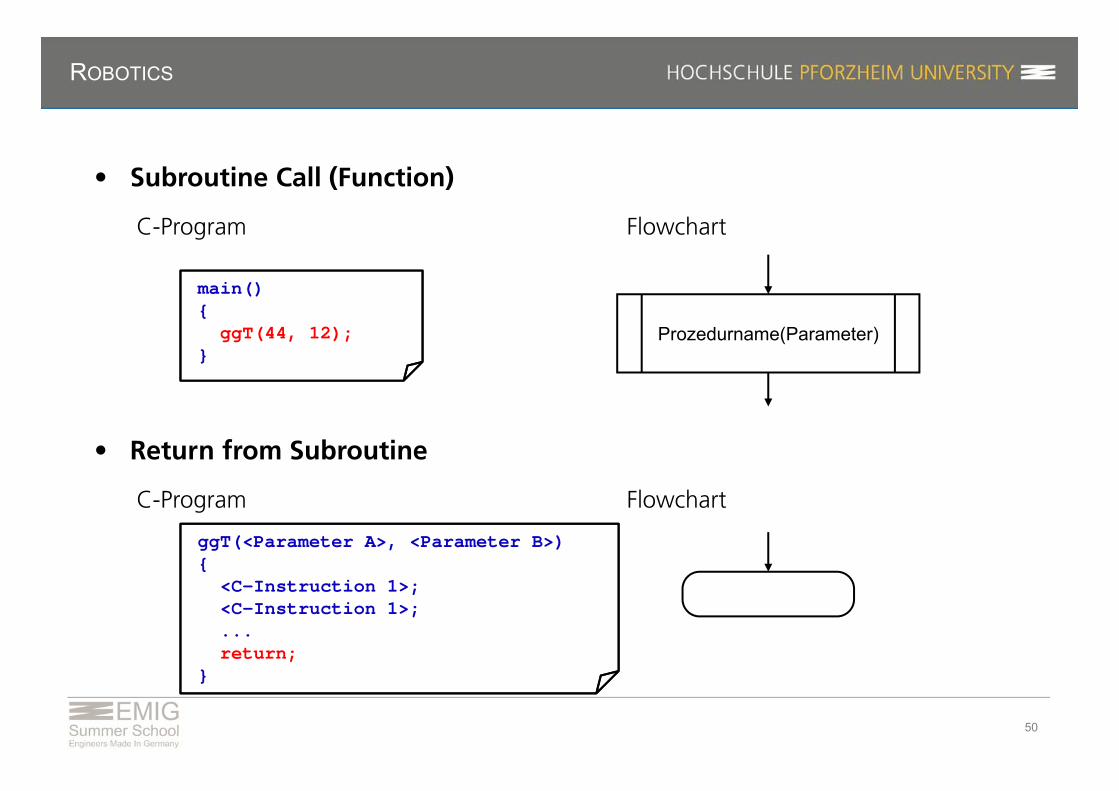
• Subroutine Call (Function)
Flowchart
• Return from Subroutine
Prozedurname(Parameter)
C-Program
C-Program
main(){
ggT(44, 12);}
ggT(<Parameter A>, <Parameter B>){
<C-Instruction 1>;<C-Instruction 1>;... return;
}