evaluating and re-evaluating agent modeling: simulation and design january 11 th, 2007 arch 484:...
Post on 19-Dec-2015
215 views
TRANSCRIPT

Evaluating and re-evaluating agent modeling: simulation and design
January 11th, 2007Arch 484: Design Computing Seminar
?
Daniel Belcher

Simulations and Models…Visual Models
Ballard Library & Neighborhood Service Center. Bohlin Cywinski Jackson, Architects

UW project: http://www.urbansim.org/

Physical simulation
EC
OT
EC
T.com
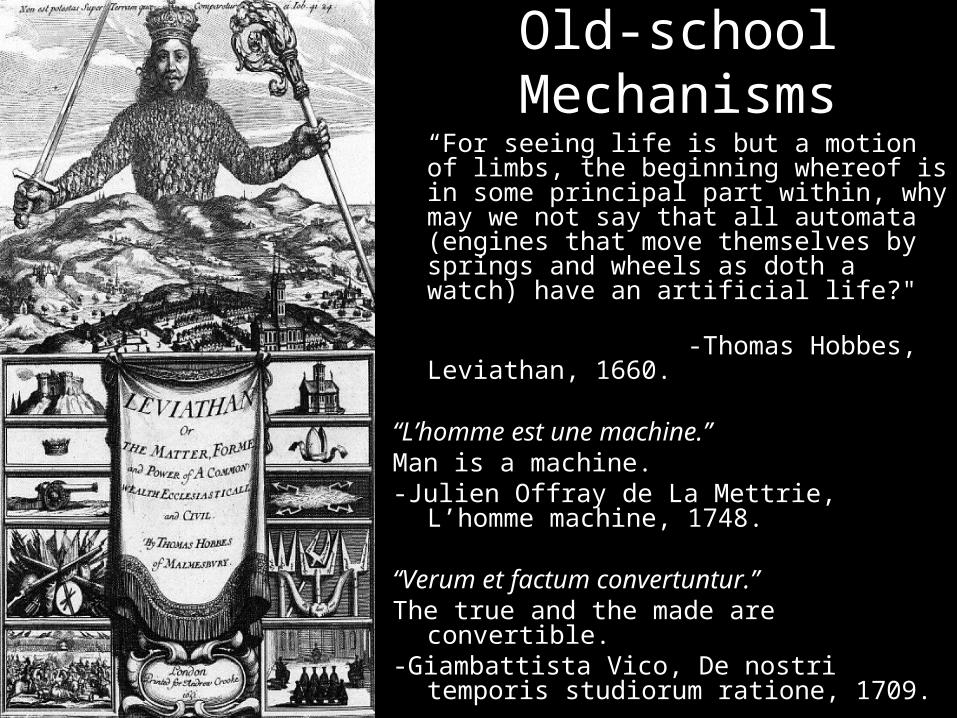
Old-school Mechanisms
“For seeing life is but a motion of limbs, the beginning whereof is in some principal part within, why may we not say that all automata (engines that move themselves by springs and wheels as doth a watch) have an artificial life?" -Thomas Hobbes, Leviathan, 1660.
“L’homme est une machine.”Man is a machine.-Julien Offray de La Mettrie, L’homme
machine, 1748.
“Verum et factum convertuntur.” The true and the made are convertible.-Giambattista Vico, De nostri temporis
studiorum ratione, 1709.


MA
SS
IVE
Softw
are
“Fellowship of the Ring” battle scenes by Weta digital.
Agents on film…

“It’s all soooooo pedestrian…”
• Much of agent modeling is focused on navigation, locomotion, and movement through space.
• Why? Humans are extremely complex…and even walking around is difficult to model.
However…• The dynamics of
pedestrian crowds are surprisingly predictable …

Pedestrian activity can be modeled as a self-organizing system (Helbing et al, 2001).
Time-lapse photography: standing crowd outside a movie theater showing crossing pedestrians forming a river-like flow.
Agent models of pedestrianflows.

EVAS Pedestrian Modeling Softwarehttp://www.vr.ucl.ac.uk/research/evas/evas.htmlEvas2.exe
“What behavior should the agent simulate?”“Does the agent exhibit this
behavior?”“Do humans behave in the same way?”
“How do groups of humans behave?”“Do models exhibit these group behaviors?”“Can models capture something beyond
simply behavior?” “Can they capture emotion? Mood?
Cognitive process?”“Just how predictable are people?”
“Should we model agents at all?”“What assumptions does agent modeling
make?”

Model-based control
Information-based control
Environment Agent
control
information
Planned path
Emergent path
Two types of control…
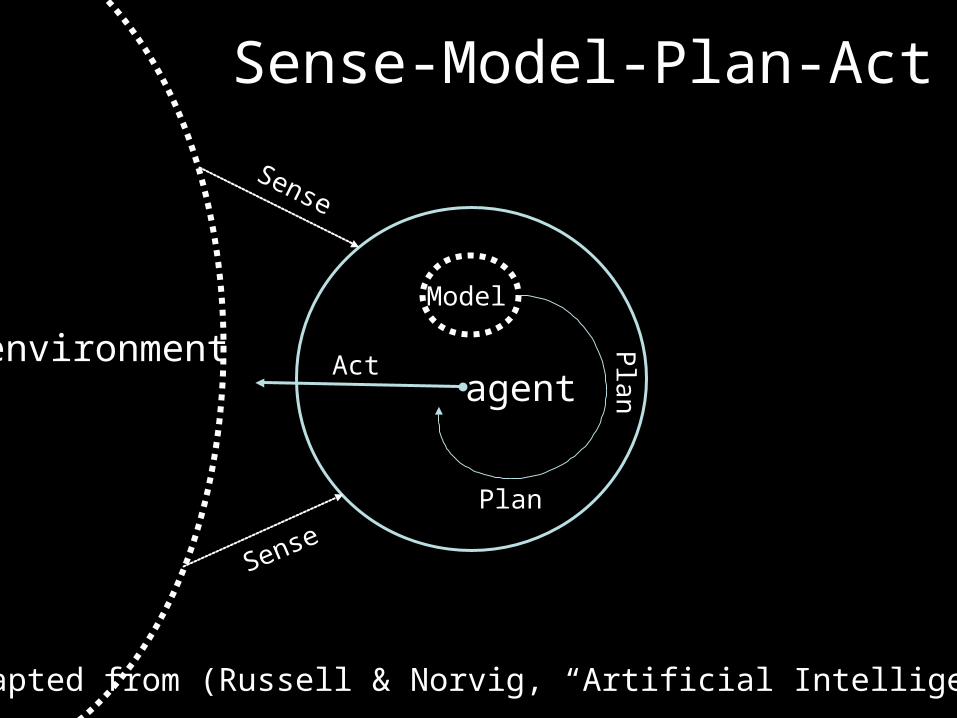
Sense-Model-Plan-Act
environment
Adapted from (Russell & Norvig, “Artificial Intelligence,”1995)
agent
Model
Sense
Sense
ActPla
n
Plan

The “Ecological” approach…S(P)A
???AKA: Gibson’s direct perception:(Gibson, “The Ecological Approach to Visual Perception,” 1979)
AKA: Active Perception in robotics(Brooks, “Intelligence without representation”, 1991)
Subsumption architecture
AKA: Situated, reactive agents

Behaviors as rules…
a) Separation. Steer to avoid local flock-mates.
b) Cohesion. Steer to move toward the average position of local flock-mates.
c) Alignment. Steer toward the average heading of local flock-mates.
d) Avoidance. Steer to avoid running into local obstacles or non-flock-mates.
1) Pedestrians are motivated to move as efficiently as possible to a destination.2) Pedestrians wish to maintain a comfortable distance from other pedestrians.3) Pedestrians wish to maintain a comfortable distance from obstacles.4) Pedestrians may be attracted to other pedestrians or objects.
(Reynolds, “Flocks, herds, and schools: A distributed behavioral model,” 1987)

Evaluating agent modeling…

Why does all this matter?
• Learn more about the agent-environment dynamic• Validate new designs against known behavior from old designs • Better understand and improve upon existing buildings • Help train building operators to better manage their buildings • Generate building visualizations showing life-like usage patterns • Illustrate the consequences of changes to building structure
Answer: Agent-based simulation allows designers to evaluate the behavior of individuals and groups inhabiting a space.
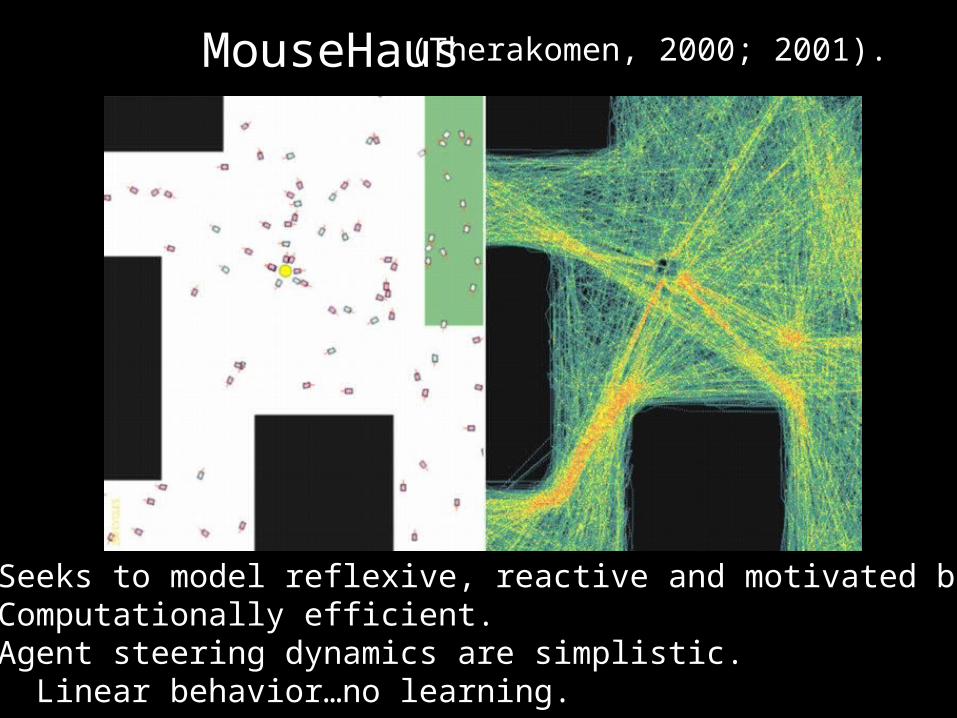
MouseHaus(Therakomen, 2000; 2001).
+ Pros: Seeks to model reflexive, reactive and motivated behaviors. Computationally efficient. - Cons: Agent steering dynamics are simplistic. Linear behavior…no learning.

Agent-based Virtual Users(Yan and Kalay, “Simulating Human Behavior in Built Environments,” 2005)

<arch:LowWall archID='FountainSide' x='9' y='39' id='516' usability='sit'/><use xlink:href='#cell_6' transform='translate(84.0,94.5)'/>
International standard of human modeling:Humanoid Animation Specification (H-Anim, 1.1)
Artificial Life Behavior Modeling: primary movementcontrol was flocking (as in Reynolds, 1987). B = f(G,R,E)
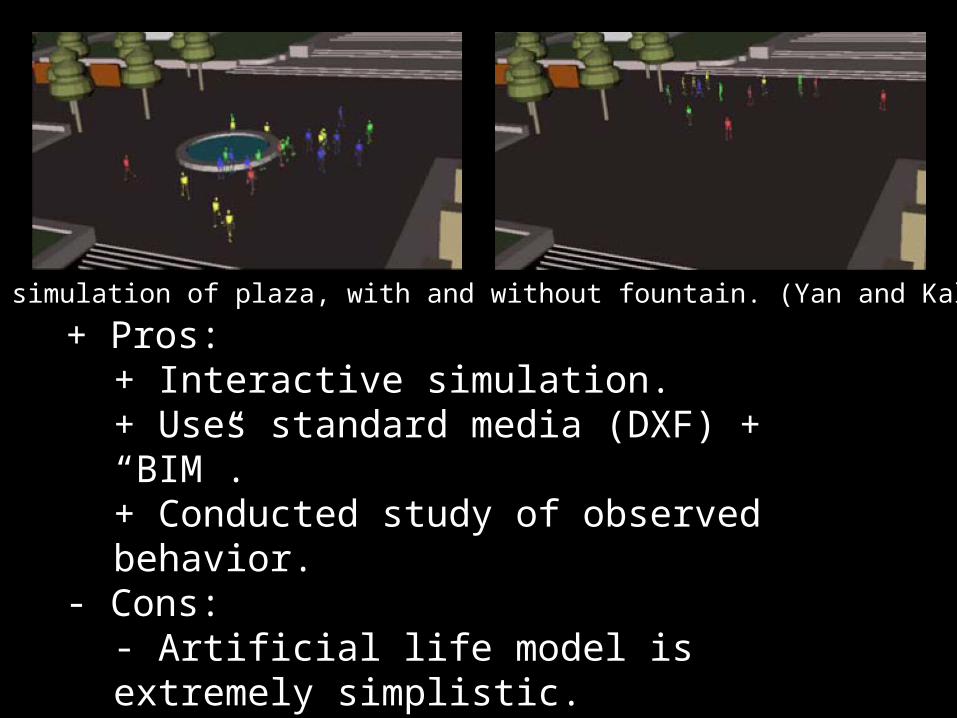
3D visual simulation of plaza, with and without fountain. (Yan and Kalay, 2005).
+ Pros: + Interactive simulation. + Uses standard media (DXF) + “BIM”. + Conducted study of observed behavior.
- Cons: - Artificial life model is extremely simplistic.- Agents explore, but do not learn.- Affordances are explicitly encoded in the environment, and not as emergent behavior.
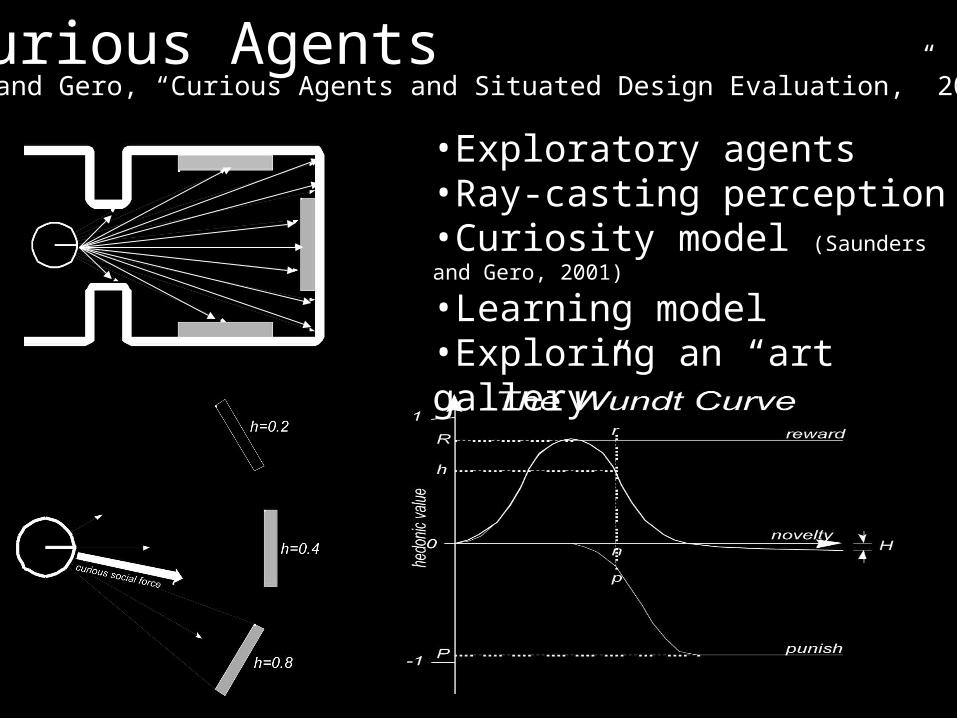
Curious Agents(Saunders and Gero, “Curious Agents and Situated Design Evaluation,” 2004)
•Exploratory agents•Ray-casting perception•Curiosity model (Saunders and Gero, 2001)
•Learning model•Exploring an “art gallery”

Agent Evaluations, before and after…
Agents learn a random array of “art work”•Uneven dispersal•Crowding around entrance and exit•Stuck in local-minima (NW room empty)
Agent’s Post-Occupancy Evaluation…•Even dispersal of interest•Less crowding•All rooms visited by each agent

Ecoconfiguration & Generative Design(Turner, Mottram & Penn, “An Ecological Approach to Generative Design,” IJDC, 2004)
Simple Agent:Affordances: “walkable” and “seeable”Walk three steps, look around, repeat
Generative Component: •Environments are randomly seeded.
•Genetic Algorithm employed to optimize configurations.
•Spatial syntax used as fitness function…Axial arrangements selected for.(Penn & Turner, 2002)

(from Turner, Mottram and Penn, 2004.)
Foyer?
Re-evaluating agent modeling…

Model-based control
Information-based control
Environment Agent
control
information
Planned path
Emergent path
Two types of control…revisited
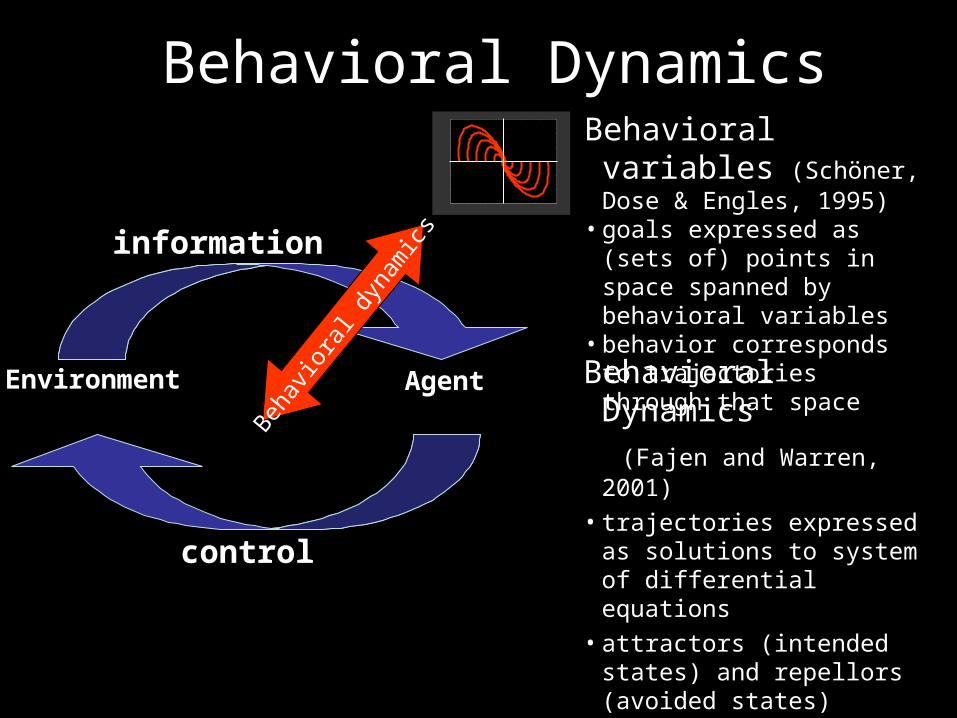
Behavioral DynamicsBehavioral variables
(Schöner, Dose & Engles, 1995)
• goals expressed as (sets of) points in space spanned by behavioral variables
• behavior corresponds to trajectories through that spaceEnvironment Agent
control
informationBe
havi
oral
dyn
amic
s
Behavioral Dynamics (Fajen and Warren, 2001)
• trajectories expressed as solutions to system of differential equations
• attractors (intended states) and repellors (avoided states)
• behavior emerges as a consequence of how information is used to adjust action system

Behavior corresponds to trajectories through that
space?
Attractor State (minima)
Repellor state (maxima)

“Trajectories expressed as solutions to system of differential equations?”
Mass-spring-damper
Sinusoid oscillation

heading
Fixed exocentric frame of reference
Behavioral variables• Heading () and its rate of change ()
Behavioral dynamics
• Identify factors • Develop an equation of
motion• Predict routes
(Fajen & Warren, 2001)
goal
g
• Direction of goal g attractor of
goal angle = ( - g)
obstacle
o
• Direction of obstacle o repellor of
obstacle angle = ( - o)
Dynamics of Steering & Obstacle Avoidance
.

The VENLabKaiser Proview 80 HMD stereo (60˚ x 40˚) InterSense 900 Tracker:
sonic beacons (12 x 12 m)
microphones
inertia cube
• Manipulate goals & obstacles during walking
• Record paths: x and z position data

• 8 random arrays, forward and backward• 15 trials per condition, Number of subject =10
– 8 * 15 = 120 trials per subject…10 subjects = 1200 reps
• Our goal: Observe and predict paths
-4 -2 0 2 40
2
4
6
8
X (m)
Z
(m)
Random Obstacle Fields (Warren & Belcher, 2002)

individual differences different set of parameters
Random Obstacles …Findings
65% of all human paths are within 1 obstacle of model
Array 1:
Array 2:
Human
Model
0
2
4
6
8S2S2
0
2
4
6
8 S2S2
S8S8
S8S8
-1 0 1 2 -1 0 1 2
-2 -1 0 1 2 -2 -1 0 1
Z (m
)Z
(m
)
X (m) X (m)

Why does all this matter again?Agent-based simulation allows designers to evaluate the behavior of individuals and groups inhabiting a space.Important to iteratively re-evaluate agent modeling on the basis of emergent models from cognitive science and robotics.Deepens our understanding of the dynamic complexity of human activity and our coupling with the Built Environment.

Thank You