evaluation of the lte positioning capabilities in...
TRANSCRIPT

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
MAY 2014
Ph.D. Dissertation
Evaluation of the LTE Positioning Capabilities inRealistic Navigation Channels
Jose A. del Peral-Rosado(1)
Advisors: Gonzalo Seco-Granados(1), Jose A. Lopez-Salcedo(1),
Francesca Zanier(2)
(1) Universitat Autonoma de Barcelona (UAB), SpainEmail: [email protected], [email protected]
(2) European Space Agency (ESA), The NetherlandsEmail: [email protected]
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 1 of 49

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Outline
Introduction
Fundamentals of LTE positioning
Performance limits of LTE positioning signals
Positioning techniques for LTE signals in multipath scenarios
Implementation and test of an experimental LTE positioning receiver
Conclusions and future work
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 2 of 49

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Outline
Introduction
Fundamentals of LTE positioning
Performance limits of LTE positioning signals
Positioning techniques for LTE signals in multipath scenarios
Implementation and test of an experimental LTE positioning receiver
Conclusions and future work
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 3 of 49
Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
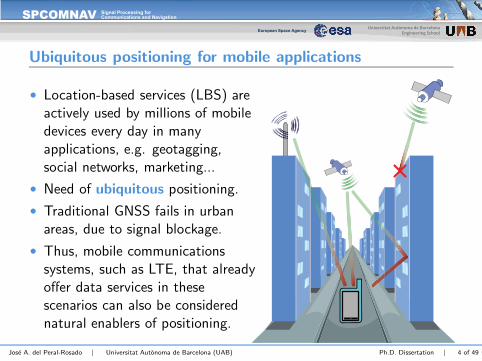
Ubiquitous positioning for mobile applications
• Location-based services (LBS) areactively used by millions of mobiledevices every day in manyapplications, e.g. geotagging,social networks, marketing...
• Need of ubiquitous positioning.
• Traditional GNSS fails in urbanareas, due to signal blockage.
• Thus, mobile communicationssystems, such as LTE, that alreadyoffer data services in thesescenarios can also be considerednatural enablers of positioning.
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 4 of 49

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Navigation with multicarrier signalsThe practical case of LTE
• LTE adopts multicarrier signals due to their goodproperties for communications.
• But, LTE also specifies a dedicated multicarriersignal for positioning, in order to enhance thesupport of mobile location applications.
• Attractive features of LTEOFDM signals to achieveaccurate positioning:◦ tight synchronisation between
base stations,◦ wideband and low-interference
signals, e.g. positioningreference signal (PRS).
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 5 of 49
−60 −40 −20 0 20 40 600
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Frequency subcarriers
Nor
mal
ised
pow
er s
pect
ral d
ensi
ty

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Motivation and objectives
• In general, signal processing techniques proposed for ranging withmulticarrier signals over multipath channels are variations ofsynchronization techniques proposed for communication systems,hence it is timely to investigate on time-delay estimationtechniques for OFDM that properly tackle the needs of positioningapplications.
• Objectives of this dissertation:◦ Explore capabilities of multicarrier signals to combat multipath from a
positioning perspective, i.e. in order to achieve a very accuratetime-delay estimation (TDE).
◦ Assessment in realistic conditions with the practical case of LTE.◦ Design a new joint time-delay and channel estimation technique to
counteract multipath.◦ Validate positioning performance of the novel technique in realistic
navigation channels.
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 6 of 49

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Outline
Introduction
Fundamentals of LTE positioning
Performance limits of LTE positioning signals
Positioning techniques for LTE signals in multipath scenarios
Implementation and test of an experimental LTE positioning receiver
Conclusions and future work
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 7 of 49
Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
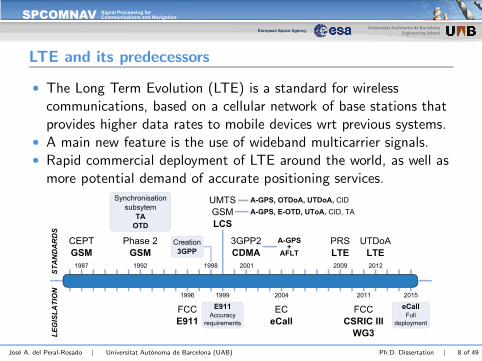
LTE and its predecessors
• The Long Term Evolution (LTE) is a standard for wirelesscommunications, based on a cellular network of base stations thatprovides higher data rates to mobile devices wrt previous systems.
• A main new feature is the use of wideband multicarrier signals.• Rapid commercial deployment of LTE around the world, as well asmore potential demand of accurate positioning services.
1987 1992
CEPT
GSM
FCC
E911
1996
Phase 2
GSM
Synchronisation
subsytem
TA
OTD
1999
E911
Accuracy
requirements
1998
Creation
3GPP
UMTS
GSM
LCS
A-GPS, E-OTD, UToA. CID, TA
A-GPS, OTDoA, UTDoA, CID
2001
3GPP2
CDMA
A-GPS+
AFLT
2004
EC
eCall
2009
PRS
LTE
2011 2015
FCC
CSRIC III
WG3
eCall
Full
deployment
2012
UTDoA
LTE
STANDARDS
LEGISLATION
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 8 of 49

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
LTE solutions to challenges in cellular positioning
• Main sources of positioning errors using TDE in wireless systems:◮ Synchronisation among reference or base stations (BSs).◮ Inter-cell interference between transmitters that use the same
frequency for spectral efficiency.◮ Attenuation of the LoS due to obstacles.◮ Dense multipath contribution in indoor and urban scenarios.
• Main features of LTE to combat these positioning errors:◮ Tight network synchronisation.◮ PRS muting in OTDoA.◮ Use of wideband signals.◮ Provides three (Rel. 9) / four (≥ Rel. 11) positioning methods.
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 9 of 49

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
LTE positioning methods
Serving
eNB
Neighbor
eNB
Neighbor
eNB
E-SMLC(location server)
assistance
data
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 10 of 49
A-GNSSfailures in
indoor/urban
scenarios.

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
LTE positioning methods
Serving
eNB
Neighbor
eNB
Neighbor
eNB
E-SMLC(location server)
assistance
data
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 10 of 49
A-GNSSfailures in
indoor/urban
scenarios.E-CIDcoarse
positioning
accuracy.

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
LTE positioning methods
Serving
eNB
Neighbor
eNB
Neighbor
eNB
E-SMLC(location server)
assistance
data
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 10 of 49
A-GNSSfailures in
indoor/urban
scenarios.E-CIDcoarse
positioning
accuracy.OTDoAimproved
accuracy
with PRS.

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
LTE and OTDoA principles
• The OTDoA method is based onthe time delay differences betweenthe reference BS (i.e. BS 1) andthe neighbour BSs:
• The time-difference measurementsfollow different hyperbolas thatintersect in the user equipment(UE) location, which is thencalculated with a trilaterationtechnique. −500 0 500 1000
−1000
−800
−600
−400
−200
0
200
400
600
800
1000
BS1
BS2
BS3
BS4
x coordinate, m
y co
ordi
nate
, m
Base stationsUser positiont1 − t
2
t1 − t
3
t1 − t
4
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 11 of 49
t1−ti =
√
(x1 − x)2 + (y1 − y)2 −√
(xi − x)2 + (yi − y)2
c

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
LTE multicarrier signals
• Downlink OFDM transmission:
• Uplink SC-OFDM transmission.
• Scalable system bandwidthsfrom 1.4 MHz to 20 MHz.
• Several signals can be used forpositioning, such as PSS, SSS,CRS, PRS or SRS.
• CRS and PRS with a frequencyreuse factor of six, Ncell
IDmod 6.
• Positioning occasions every 160,320, 640 or 1280 ms.
Positioning
Reference
Signal (PRS)
Fre
qu
ency
Cell-specific
Reference
Signal (CRS)
DC subcarrier
OFDM symbol
Subcarrier
Resource block
Time T = 66.67μs
Fsc= 15 kHz
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 12 of 49
x (m).=
√
2C
N
N−1∑
n=0
d (n)·p (n) exp
(
j2πnm
N
)
Downlink allocation

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Outline
Introduction
Fundamentals of LTE positioning
Performance limits of LTE positioning signals
Positioning techniques for LTE signals in multipath scenarios
Implementation and test of an experimental LTE positioning receiver
Conclusions and future work
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 13 of 49
Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
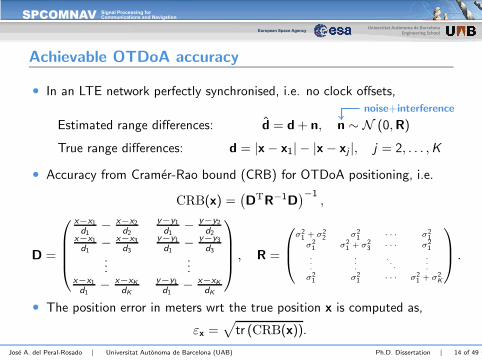
Achievable OTDoA accuracy
• In an LTE network perfectly synchronised, i.e. no clock offsets,
Estimated range differences: d = d+ n, n ∼ N (0,R)
True range differences: d = |x− x1| − |x− xj |, j = 2, . . . ,K
• Accuracy from Cramer-Rao bound (CRB) for OTDoA positioning, i.e.
CRB(x) =(
DTR−1D)−1
,
D =
x−x1d1
− x−x2d2
y−y1d1
− y−y2d2
x−x1d1
− x−x3d3
y−y1d1
− y−y3d3
......
x−x1d1
− x−xKdK
y−y1d1
− x−xKdK
, R =
σ21 + σ2
2 σ21 · · · σ2
1σ21 σ2
1 + σ23 · · · σ2
1
.
.
.
.
.
....
.
.
.
σ21 σ2
1 · · · σ21 + σ2
K
.
• The position error in meters wrt the true position x is computed as,
εx =√
tr (CRB(x)).
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 14 of 49
noise+interference

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
CRB for TDE over AWGN channel and matched filter
The covariance matrix R of the range estimation is modelled with:
• TDE performance of a certain estimator over AWGN channel:
◦ Synchronization techniques based on blind estimation, e.g. van deBeek, have an accuracy of Ts (i.e. 277.78 m for 1.08 MHz).
◦ Use of pilot signals with matched filter, inherited in LTE from CDMAsystems (e.g. UMTS or CDMA2000), hereby called conventional TDE.
Received LTE signal: y (m) = x (m)⊛ h (m) + v (m)
ML time-delay estimation: τ = argmaxτ
{
|Ryx (τ)|2}
Correlation function: Ryx (τ).=
N−1∑
m=0
y (m) · x∗s (m − τ)
• CRB for TDE over AWGN channel,
CRB(τ) = T 2
8π2 · SINR ·∑
n∈Na
p (n)2 · n2
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 15 of 49
Noise plusinterference
Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
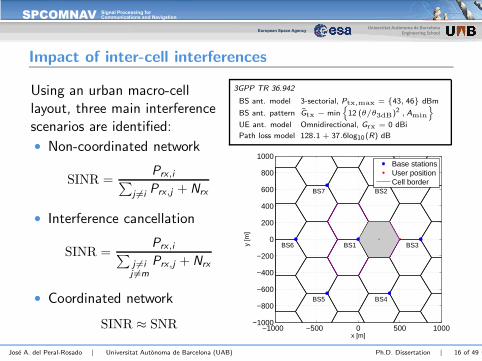
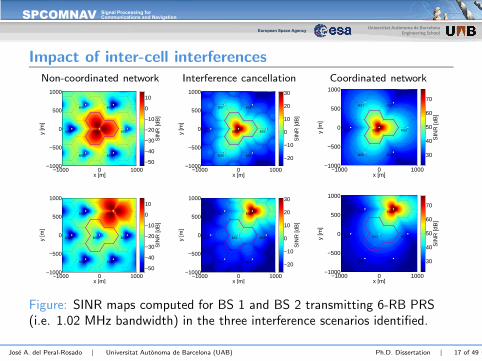
Impact of inter-cell interferences
Using an urban macro-celllayout, three main interferencescenarios are identified:
• Non-coordinated network
SINR =Prx,i
∑
j 6=i Prx,j + Nrx
• Interference cancellation
SINR =Prx,i
∑
j 6=ij 6=m
Prx,j + Nrx
• Coordinated network
SINR ≈ SNR −1000 −500 0 500 1000−1000
−800
−600
−400
−200
0
200
400
600
800
1000
BS1
BS2
BS3
BS4BS5
BS6
BS7
x [m]
y [m
]
Base stationsUser positionCell border
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 16 of 49
3GPP TR 36.942
BS ant. model 3-sectorial, Ptx,max = {43, 46} dBm
BS ant. pattern Gtx − min{
12 (θ/θ3dB)2 ,Amin
}
UE ant. model Omnidirectional, Grx = 0 dBi
Path loss model 128.1 + 37.6log10(R) dB
Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Impact of inter-cell interferencesNon-coordinated network Interference cancellation Coordinated network
x [m]
y [m
]
BS1
BS2
BS3
BS4BS5
BS6
BS7
−1000 0 1000−1000
−500
0
500
1000
SIN
R [d
B]
−50
−40
−30
−20
−10
0
10
x [m]y
[m]
BS1
BS2
BS3
BS4BS5
BS6
BS7
−1000 0 1000−1000
−500
0
500
1000
SIN
R [d
B]
−20
−10
0
10
20
30
x [m]
y [m
]
BS1
BS2
BS3
BS4BS5
BS6
BS7
−1000 0 1000−1000
−500
0
500
1000
SIN
R [d
B]
30
40
50
60
70
x [m]
y [m
]
BS1
BS2
BS3
BS4BS5
BS6
BS7
−1000 0 1000−1000
−500
0
500
1000
SIN
R [d
B]
−50
−40
−30
−20
−10
0
10
x [m]
y [m
]
BS1
BS2
BS3
BS4BS5
BS6
BS7
−1000 0 1000−1000
−500
0
500
1000
SIN
R [d
B]
−20
−10
0
10
20
30
x [m]
y [m
]
BS1
BS2
BS3
BS4BS5
BS6
BS7
−1000 0 1000−1000
−500
0
500
1000
SIN
R [d
B]
30
40
50
60
70
Figure: SINR maps computed for BS 1 and BS 2 transmitting 6-RB PRS(i.e. 1.02 MHz bandwidth) in the three interference scenarios identified.
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 17 of 49

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Impact of inter-cell interferencesNon-coordinated network Interference cancellation Coordinated network
x [m]
y [m
]
BS1
BS2
BS3
BS4BS5
BS6
BS7
−1000 0 1000−1000
−500
0
500
1000
SIN
R [d
B]
−50
−40
−30
−20
−10
0
10
x [m]y
[m]
BS1
BS2
BS3
BS4BS5
BS6
BS7
−1000 0 1000−1000
−500
0
500
1000
SIN
R [d
B]
−20
−10
0
10
20
30
x [m]
y [m
]
BS1
BS2
BS3
BS4BS5
BS6
BS7
−1000 0 1000−1000
−500
0
500
1000
SIN
R [d
B]
30
40
50
60
70
x [m]
y [m
]
BS1
BS2
BS3
BS4BS5
BS6
BS7
−1000 0 1000−1000
−500
0
500
1000
SIN
R [d
B]
−50
−40
−30
−20
−10
0
10
x [m]
y [m
]
BS1
BS2
BS3
BS4BS5
BS6
BS7
−1000 0 1000−1000
−500
0
500
1000
SIN
R [d
B]
−20
−10
0
10
20
30
x [m]
y [m
]
BS1
BS2
BS3
BS4BS5
BS6
BS7
−1000 0 1000−1000
−500
0
500
1000
SIN
R [d
B]
30
40
50
60
70
Figure: SINR maps computed for BS 1 and BS 2 transmitting 6-RB PRS(i.e. 1.02 MHz bandwidth) in the three interference scenarios identified.
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 17 of 49
Coord. 6-RB PRS and no shadowing,distance UE to BS from 200 m to 1000 m
SINR ∈ [34.1, 61.1] dBC/N0 ∈ [94.9, 121.2] dB-Hz

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Conventional TDE for AWGN ChannelRanging performance and CRB for TDE
−300 −200 −100 0 100 200 3000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Correlation lag (meters)
Aut
o−co
rrel
atio
n fu
nctio
n
SSRS, 6 RBRS, 15 RBRS, 25 RBRS, 50 RBRS, 75 RBRS, 100 RB
40 45 50 55 60 6510
−1
100
101
102
103
C/N0 (dB·Hz)
RM
SE
(m
eter
s)
CRBPSS/SSS, N
a= 62 @ 1.4MHz
PRS, Na= 12 @ 1.4MHz
PRS, Na= 30 @ 3MHz
PRS, Na= 50 @ 5MHz
PRS, Na= 100 @ 10MHz
PRS, Na= 150 @ 15MHz
PRS, Na= 200 @ 20MHz
• Main lobe of the ACF is narrower as BW increases =⇒ better accuracy.
• RMSE of the matched filter attains the CRB for moderate to high C/N0.
• Matched filter is saturated (producing outlier estimations) below C/N0
threshold of 55 dB-Hz, i.e. SINR = -5 dB for 6-RB PRS.
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 18 of 49

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Impact of multipath on time-delay estimationLTE standard channel models and first-peak estimation
• Realistic navigation scenarios, such as urban environments, arecharacterized by the presence of multipath.
• The LTE standard specifies tapped-delay line (TDL) models, i.e.EPA, EVA and ETU channel models that can represent (in generalterms) these realistic navigation scenarios:
h (m) =Lc−1∑
k=0
hk · sinc (m − τc,k − τ) .
• Poor TDE performance of the matched filter in these scenarios.• Many authors use the first-peak estimator (or threshold-basedestimator), as an extension of the matched filter, to improve TDE.
• The first-peak estimator is based on finding the first peak (abovethe noise level) of the correlation function to obtain the TDE.
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 19 of 49
time delayof 1st path
fixed taps delays
Rayleigh-distributed
Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
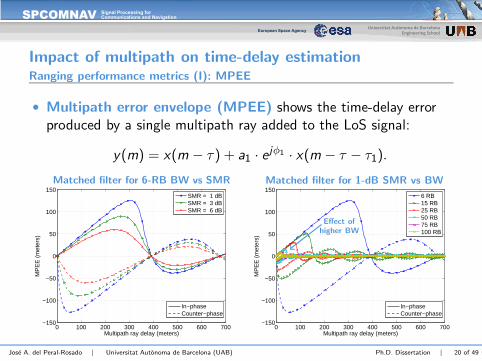
Impact of multipath on time-delay estimationRanging performance metrics (I): MPEE
• Multipath error envelope (MPEE) shows the time-delay errorproduced by a single multipath ray added to the LoS signal:
y(m) = x(m − τ) + a1 · ejφ1 · x(m − τ − τ1).
Matched filter for 6-RB BW vs SMR
0 100 200 300 400 500 600 700−150
−100
−50
0
50
100
150
Multipath ray delay (meters)
MP
EE
(m
eter
s)
SMR = 1 dBSMR = 3 dBSMR = 6 dB
In−phaseCounter−phase
Matched filter for 1-dB SMR vs BW
0 100 200 300 400 500 600 700−150
−100
−50
0
50
100
150
Multipath ray delay (meters)
MP
EE
(m
eter
s)
6 RB15 RB25 RB50 RB75 RB100 RB
In−phaseCounter−phase
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 20 of 49
Effect ofhigher BW

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Impact of multipath on time-delay estimationRanging performance metrics (II): Mean delay and timing error histogram
• Mean delay τ of PDP approximates the delay error for low BW.• Timing error histogram shows impact of the multipath channelon the ranging accuracy of the TDE, e.g. using matched filter.
τ =
K∑
k=1
τc,k |ak |2
K∑
k=1
|ak |2
EVA−−→ τ = 47 m
−50 0 50 100 150 2000
0.01
0.02
0.03
0.04
0.05
0.06
Timing error (meters)
PD
F
6 RB
15 RB
25 RB
50 RB
75 RB
100 RB
EVA delays
−50 0 50 100 150 2000
0.5
1
Tap delay (meters)
EV
A P
DP
Timing error histogram for EVA channelusing matched filter
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 21 of 49
Example: EVA channel model
HighestBW
LowestBW

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Impact of multipath on time-delay estimationRanging performance metrics (III): Cumulative density function (CDF)
Example: ETU channel model, SNR = 50 dB (i.e. PRS-enabled at cell edge)
−50 0 50 100 150 200 250 300 3500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Correlation lag (meters)
Cor
rela
tion
func
tion
Correlation of the transmitted signalCorrelation of the received signalFirst−peak delay estimation
0 20 40 60 80 1000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Timing error (meters)C
umul
ativ
e D
ensi
ty F
unct
ion
(CD
F)
6 RB, 1.08 MHz15 RB, 2.7 MHz25 RB, 4.5 MHz50 RB, 9.0 MHz75 RB, 13.5 MHz100 RB, 18.0 MHz
Cross-correlation function for 100-RB PRS CDF using first-peak estimation
• First-peak estimator improves TDE wrt matched filter for high BW.
• 67% and 95% CDF can be used for accuracy requirements, e.g. E911.
• Poor TDE performance for low BW (τ = 59 m for ETU model).
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 22 of 49
95%
67%

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Impact of multipath on time-delay estimationRanging performance metrics (III): Cumulative density function (CDF)
Example: ETU channel model, SNR = 50 dB (i.e. PRS-enabled at cell edge)
−50 0 50 100 150 200 250 300 3500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Correlation lag (meters)
Cor
rela
tion
func
tion
Correlation of the transmitted signalCorrelation of the received signalFirst−peak delay estimation
0 20 40 60 80 1000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Timing error (meters)C
umul
ativ
e D
ensi
ty F
unct
ion
(CD
F)
6 RB, 1.08 MHz15 RB, 2.7 MHz25 RB, 4.5 MHz50 RB, 9.0 MHz75 RB, 13.5 MHz100 RB, 18.0 MHz
Cross-correlation function for 6-RB PRS CDF using first-peak estimation
• First-peak estimator improves TDE wrt matched filter for high BW.
• 67% and 95% CDF can be used for accuracy requirements, e.g. E911.
• Poor TDE performance for low BW (τ = 59 m for ETU model).
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 22 of 49
95%
67%

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Impact of both interference and multipath
• Considering an LTE coordinated network, the achievable positionaccuracy of a first-peak estimator is assessed in pedestrian andurban scenarios, characterized by EPA and ETU models:
1. SINR computed with 5 most powerful BSs wrt user location x2. Applying multipath, 67% and 95% CDF of TDE errors are considered
typical values of the std. dev. of pseudoranges for every SINR.3. Compute CRB for OTDoA at x using these std. dev. values in R.
1©
x [m]
y [m
]
BS1
BS2
BS3
BS4BS5
BS6
BS7
−1000 0 1000−1000
−500
0
500
1000
SIN
R [d
B]
30
40
50
60
70
2©
0 20 40 60 80 1000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Timing error (meters)
Cum
ulat
ive
Den
sity
Fun
ctio
n (C
DF
)
6 RB, 1.08 MHz15 RB, 2.7 MHz25 RB, 4.5 MHz50 RB, 9.0 MHz75 RB, 13.5 MHz100 RB, 18.0 MHz
3©
CRB(x) =(
DTR−1D)−1
εx =√
tr (CRB(x))
=⇒ Assessment of the achievable positioning accuracy
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 23 of 49
Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
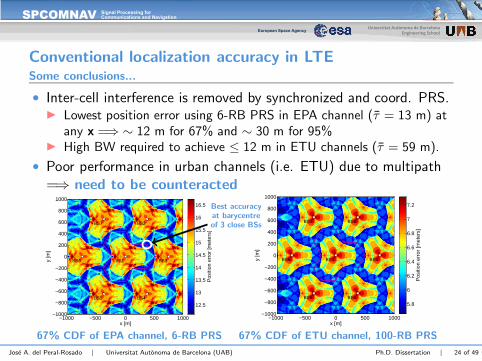
Conventional localization accuracy in LTESome conclusions...
• Inter-cell interference is removed by synchronized and coord. PRS.◮ Lowest position error using 6-RB PRS in EPA channel (τ = 13 m) at
any x =⇒ ∼ 12 m for 67% and ∼ 30 m for 95%◮ High BW required to achieve ≤ 12 m in ETU channels (τ = 59 m).
• Poor performance in urban channels (i.e. ETU) due to multipath=⇒ need to be counteracted
x [m]
y [m
]
BS1
BS2
BS3
BS4BS5
BS6
BS7
−1000 −500 0 500 1000−1000
−800
−600
−400
−200
0
200
400
600
800
1000
Pos
ition
err
or [m
eter
s]
12.5
13
13.5
14
14.5
15
15.5
16
16.5
x [m]
y [m
]
BS1
BS2
BS3
BS4BS5
BS6
BS7
−1000 −500 0 500 1000−1000
−800
−600
−400
−200
0
200
400
600
800
1000
Pos
ition
err
or [m
eter
s]
5.8
6
6.2
6.4
6.6
6.8
7
7.2
67% CDF of EPA channel, 6-RB PRS 67% CDF of ETU channel, 100-RB PRS
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 24 of 49
Best accuracyat barycentreof 3 close BSs

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Outline
Introduction
Fundamentals of LTE positioning
Performance limits of LTE positioning signals
Positioning techniques for LTE signals in multipath scenarios
Implementation and test of an experimental LTE positioning receiver
Conclusions and future work
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 25 of 49
Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
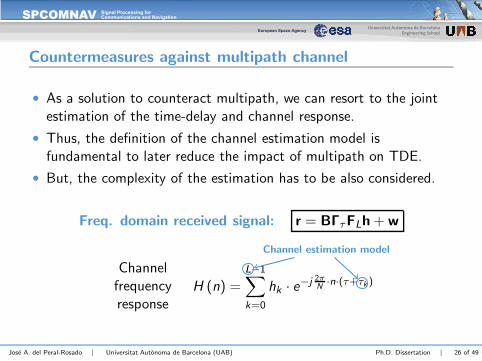
Countermeasures against multipath channel
• As a solution to counteract multipath, we can resort to the jointestimation of the time-delay and channel response.
• Thus, the definition of the channel estimation model isfundamental to later reduce the impact of multipath on TDE.
• But, the complexity of the estimation has to be also considered.
Freq. domain received signal: r = BΓτFLh+ w
Channelfrequencyresponse
H (n) =
L−1∑
k=0
hk · e−j 2π
N·n·(τ+τk )
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 26 of 49
Channel estimation model

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Characterization of propagation channel models
• Close-in multipath has most of its channel contribution within asampling period Ts wrt the LoS ray.◦ Examples: EPA model or ETU model with a 6-RB bandwidth◦ Average PDP of the channel can be used to set the model order L.
0 0.25 0.5 0.75 1 1.25 1.50
0.02
0.04
0.06
0.08
0.1
0.12
Ts @ 6 RB
Ts @ 15 RB
Ts @ 25 RB
Ts @ 50 RB
Ts @ 75 RB
Ts @ 100 RB
Mean delay (µs)
PD
F
EPAEVAETU
0 1 2 3 4 5 6 7 80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Tap delay (Ts units)
Ave
rage
pow
er−
dela
y pr
ofile
Signal bandwidth = 1/Ts = 1.02 MHz
Average PDPMultipath delays
PDF of the mean delay for LTE models Average PDP for ETU with 6-RB PRS
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 27 of 49

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Channel estimation models and their CRB
Single-tap estimation model:
0 1 2 3 4 5 60
0.5
1
Tap delay (Ts units)
Abs
olut
e C
IR
Single−tap model
τk = 0 , k = 0
CRBτ,ST =[
J−1 (τ, h0)]
1,1
Arbitrary-tap estimation model:
0 1 2 3 4 5 60
0.5
1
Tap delay (Ts units)
Abs
olut
e C
IR
Arbitrary−tap model
τk = τc,k , 0 ≤ k < Lc
CRBτ,AT =[
J−1 (τ, h, τ c)]
1,1
Periodic-tap estimation model:
0 1 2 3 4 5 60
0.5
1
Tap delay (Ts units)
Abs
olut
e C
IR
Periodic−tap model
{τk} = {0, 1, · · · , L− 1} , 0 ≤ k < L
CRBτ,PT =[
J−1 (τ, h)]
1,1
Hybrid-tap estimation model:
0 1 2 3 4 5 60
0.5
1
Tap delay (Ts units)
Abs
olut
e C
IR
τ’
Hybrid−tap model
{τk} = {0, τ ′, 1, · · · , L− 2} , 0 ≤ k < L
0 < τ ′ < 1 ,CRBτ,HT =
[
J−1 (τ, h, τ ′)]
1,1
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 28 of 49

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
One-dimensional joint ML (1D-JML) estimatorPeriodic-tap estimation model, L > 1
• Joint maximum likelihood estimation of the time delay τ and thechannel coefficients h = [h0, · · · , hL−1]
T:[
τ
h
]
= argminτ,h
{
‖r − BΓτFLh‖2}
Aτ = BΓτFL −→ h = A†τr =
(
AHτAτ
)−1AH
τr
τ = argminτ
{
minh
‖r− Aτh‖2
}
= argminτ
{
‖(
I− AτA†τ
)
r‖2}
• Severe degradation of the TDE performance due to close-inmultipath, because it is not properly modelled between the firsttwo samples, i.e. model mismatch.
• Particular case for L = 1 results in single-tap estimation model, i.e.conventional matched filter.
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 29 of 49
Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
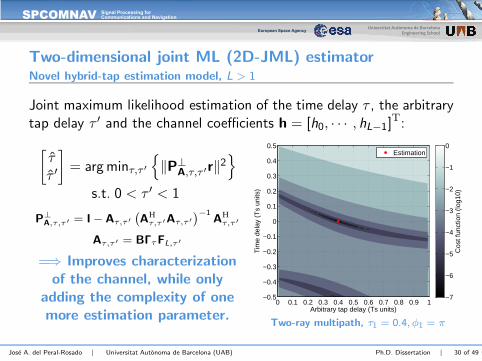
Two-dimensional joint ML (2D-JML) estimatorNovel hybrid-tap estimation model, L > 1
Joint maximum likelihood estimation of the time delay τ , the arbitrarytap delay τ ′ and the channel coefficients h = [h0, · · · , hL−1]
T:
[
ττ ′
]
= argminτ,τ ′{
‖P⊥A,τ,τ ′r‖
2}
s.t. 0 < τ ′ < 1
P⊥A,τ,τ ′ = I−Aτ,τ ′
(
AH
τ,τ ′Aτ,τ ′
)−1AH
τ,τ ′
Aτ,τ ′ = BΓτFL,τ ′
=⇒ Improves characterizationof the channel, while only
adding the complexity of onemore estimation parameter.
Arbitrary tap delay (Ts units)
Tim
e de
lay
(Ts
units
)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5Estimation
Cos
t fun
ctio
n (lo
g10)
−7
−6
−5
−4
−3
−2
−1
0
Two-ray multipath, τ1 = 0.4, φ1 = π
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 30 of 49

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
MPEE of the 1D- and 2D-JML estimators
0 0.2 0.4 0.6 0.8 1 1.2 1.4−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
Multipath ray delay (Ts units)
MP
EE
(T
s un
its)
Signal bandwidth = 1/Ts = 1.02 MHz
1D−JML, L = 11D−JML, L = 82D−JML, L = 22D−JML, L = 8
In−phaseCounter−phase
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 31 of 49
Simulation parameters:• 1-dB SMR, no noise.
• 6-RB PRS, N = 68 sc.
• Ts = T/N = 980.39 ns.
• TDE in [−Ts/2,Ts/2].
Conclusions:
◮ 1D-JML for L > 1outperforms 1D-JMLfor L = 1, but stillsignificant bias.
◮ 2D-JML TDE iscompletely unbiased forτ1 within 0 and 1.
◮ Same 2D-JMLperformance even whendecreasing L.

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Bias induced by LTE channel modelsExample: Low signal bandwidth of 1.4 MHz in ETU channel
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
Time−delay error (Ts units)
PD
F
Signal bandwidth = 1/Ts = 1.02 MHz
Max. # of outliers
1D−JML, L = 11D−JML, L = 62D−JML, L = 7
0 0.1 0.2 0.3 0.4 0.50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Absolute time−delay error (Ts units)C
DF
Signal bandwidth = 1/Ts = 1.02 MHz
1D−JML, L = 11D−JML, L = 62D−JML, L = 7
PDF of the time-delay errors CDF of the absolute time-delay errors
• Particular case of ETU channel with 6-RB PRS (absence of noise):◮ Poor performance of the 1D-JML estimators, e.g. 67% CDF errors
=⇒ 0.25·Ts (= 73.5 m) with L = 1, 0.23·Ts (= 67.7 m) with L = 6◮ Notable improvement provided by 2D-JML estimator for L = 7
=⇒ 0.12·Ts (= 35.3 m) for 67% CDF
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 32 of 49

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Bias induced by LTE channel modelsGeneral assessment of the channel estimation models
• In order to find the ultimate positioning accuracy in LTE, we needto study the performance limits of the 1D- and 2D-JML TDE for awide variety of scenarios (first, in absence of noise):◦ LTE signal bandwidths from 6 RB to 100 RB,◦ LTE channel models, i.e. EPA, EVA and ETU,◦ L estimation taps, i.e. from 1 to a maximum of 90.
• CDF of the time-delay errors of these estimators is computed.• Concluding remarks:
◮ At low signal bandwidths (e.g. 6-RB PRS), propagation rays jointlycontribute to the multipath effect, thus Lopt is equivalent to the delayspread of the channel.
◮ When the signal bandwidth is increased, more independent multipathcontribution lead to the adaptive selection of the model order L.
◮ Using the optimum number of taps Lopt, the 2D-JML estimatorachieves the minimum bias in most of the cases.
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 33 of 49

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
RMSE and bias of the JML estimatorsAttainability of the CRB for TDE
• Considering a two-ray multipath with φ1 = π and SMR = 1 dB:◮ Both 1D- and 2D-JML estimators attain their corresponding CRB.◮ One more estimation variable increases RMSE and C/N0 threshold.◮ Trade-off =⇒ counteract multipath vs robustness against noise.
40 50 60 70 80 90 100 110 12010
−2
10−1
100
101
102
103
RM
SE
(m
)
C/N0 (dB−Hz)
Periodic−tap estimation model
CRBPT
1D−JML, L = 2
40 50 60 70 80 90 100 110 12010
−2
10−1
100
101
102
103
RM
SE
(m
)
C/N0 (dB−Hz)
Hybrid−tap estimation model
1D−JML, L = 22D−JML, L = 2
CRBRMSE
Case 1: τc,k = {0, 1} Case 2: τc,k = {0, 0.5}
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 34 of 49
Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
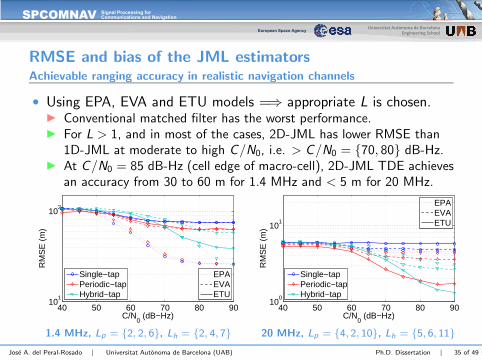
RMSE and bias of the JML estimatorsAchievable ranging accuracy in realistic navigation channels
• Using EPA, EVA and ETU models =⇒ appropriate L is chosen.◮ Conventional matched filter has the worst performance.◮ For L > 1, and in most of the cases, 2D-JML has lower RMSE than
1D-JML at moderate to high C/N0, i.e. > C/N0 = {70, 80} dB-Hz.◮ At C/N0 = 85 dB-Hz (cell edge of macro-cell), 2D-JML TDE achieves
an accuracy from 30 to 60 m for 1.4 MHz and < 5 m for 20 MHz.
40 50 60 70 80 9010
1
102
RM
SE
(m
)
C/N0 (dB−Hz)
Single−tapPeriodic−tapHybrid−tap
EPAEVAETU
40 50 60 70 80 9010
0
101
RM
SE
(m
)
C/N0 (dB−Hz)
Single−tapPeriodic−tapHybrid−tap
EPAEVAETU
1.4 MHz, Lp = {2, 2, 6}, Lh = {2, 4, 7} 20 MHz, Lp = {4, 2, 10}, Lh = {5, 6, 11}
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 35 of 49

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Outline
Introduction
Fundamentals of LTE positioning
Performance limits of LTE positioning signals
Positioning techniques for LTE signals in multipath scenarios
Implementation and test of an experimental LTE positioning receiver
Conclusions and future work
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 36 of 49
Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Experimental validation of LTE positioning performance
• The results obtained with the novel 2D-JML technique can bevalidated with real LTE signals, generated at the EuropeanNavigation Laboratory (ENL) of ESA (ESTEC, The Netherlands).
• Thus, a software-defined radio (SDR) LTE positioning receiver isimplemented in MATLAB to acquire, track and position with LTEradio signals.
• This experimental LTE positioning receiver is then tested for thescenarios under study.
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 37 of 49

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Testbench and SDR LTE receiver
CP-based
coarse sync
Sync signals
detection
Cell acquisition Tracking loops OTDoA positioning
Trilateration
techniqueUSRP
DLL loop
PLL loop
CFO
estimation
Time delay
estimation
Pull-in Steady state
LTE RF
signal
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 38 of 49
Testbench:• Spirent E2010 and VR5,
• USRP N210 with DBSRX2,
• 4 sync. BSs at 1.86 GHz,
• 1.4-MHz system bandwidth,
• PRS-enabled, but CRSsymbols without data areused (more frequent).
SDR LTEpositioningreceiver

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Validation of the SDR LTE positioning receiverLTE pilot signals
0 20 40 60 80 100 120
−60
−40
−20
0
20
40
60
OFDM symbols
Sub
carr
iers
Void
PSS
SSS
CRS1
CRS2
CRS3
CRS4
PRS1
PRS2
PRS3
PRS4
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 39 of 49
Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
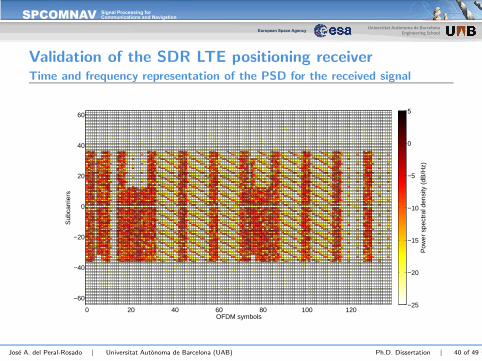
Validation of the SDR LTE positioning receiverTime and frequency representation of the PSD for the received signal
0 20 40 60 80 100 120
−60
−40
−20
0
20
40
60
OFDM symbols
Sub
carr
iers
Pow
er s
pect
ral d
ensi
ty (
dB/H
z)
−25
−20
−15
−10
−5
0
5
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 40 of 49

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Validation of the SDR LTE positioning receiverOTDoA positioning results
• Once in signal tracking, timing offset among BSs is calibrated.• Positioning engine validated=⇒Position errors lower than 3 m, ina static AWGN scenario for 6-RB CRS with C/N0 ∈ [70, 80] dB-Hz.
372 373 374 375 376 377 378
−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
x coordinate (m)
y co
ordi
nate
(m
)
Position estimatesTrue positionMean position est.Error ellipse, 1−σ
0 0.5 1 1.5 2 2.50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Position error (m)
CD
F
Position estimations and true position CDF of position errors
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 41 of 49

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Multipath error envelope using real LTE signal
• First, acquisition and tracking in LoS, then TDE with multipath.• Main results of the MPEE using real and simulated signal:
◮ 1D-JML estimators obtain very similar performance in both cases.◮ Impact of noise is more severe for 2D-JML than for 1D-JML.
0 0.2 0.4 0.6 0.8 1 1.2 1.4−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
Multipath ray delay (Ts units)
MP
EE
(T
s un
its)
Signal bandwidth = 1/Ts = 1.02 MHz
1D−JML, L = 11D−JML, L = 82D−JML, L = 8
Real signalSimulated signal
0 0.1 0.2 0.3 0.4 0.50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Absolute TDE error (Ts units)
CD
F
Signal bandwidth = 1/Ts = 1.02 MHz
1D−JML, L = 11D−JML, L = 82D−JML, L = 8
MPEE of 1D- and 2D-JML estimators CDF of JML ranging errors
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 42 of 49

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Achievable ranging performance in urban channelsAccuracy of 1D- and 2D-JML estimators
• Realistic navigation channel is emulated with ETU model.• Using 1.4-MHz system bandwidth =⇒ close-in multipath scenario.• 2D-JML TDE outperforms 1D-JML TDE for C/N0 ≃ 85 dB-Hz.
0 0.1 0.2 0.3 0.4 0.50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Absolute TDE error (Ts units)
CD
F
Signal bandwidth = 1/Ts = 1.02 MHz
1D−JML, L = 11D−JML, L = 62D−JML, L = 7
0 5 10 15 20 2530
40
50
60
70
80
90
Time (s)
RM
SE
(m
)
Signal bandwidth = 1/Ts = 1.02 MHz
1D−JML, L = 11D−JML, L = 62D−JML, L = 7
CDF of ranging errors RMSE over 1 s (dots) and 25 s (dashes)
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 43 of 49

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Achievable ranging performance in urban channelsComparison between using real and simulated signals
• The experiment validates simulation results for close-in multipath:◮ JML ranging errors are in accordance with simulations (in black).◮ Achievable ranging accuracy of 2D-JML with real signal (in blue) is
∼ 50 m for a 1.4-MHz bandwidth and C/N0 ≃ 85 dB-Hz.
Time-delayǫ67% (m) ǫ95% (m) RMSE (m) Bias (m)
estimator
1D-JML73.5 / 74.4 147.1 / 137.4 75.3 / 78.1 52.5 / 54.2
L = 1
1D-JML67.7 / 62.1 113.2 / 117.4 63.4 / 66.4 28.2 / 25.1
L = 6
2D-JML35.3 / 40.3 69.1 / 99.1 39.6 / 51.4 19.8 / 19.1
L = 7
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 44 of 49

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Outline
Introduction
Fundamentals of LTE positioning
Performance limits of LTE positioning signals
Positioning techniques for LTE signals in multipath scenarios
Implementation and test of an experimental LTE positioning receiver
Conclusions and future work
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 45 of 49

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Conclusions
• Achievable positioning of LTE with conventional estimators:◦ Necessary coordination of PRS transmission for accurate positioning.◦ Achievable accuracy between 12 m and 30 m in pedestrian channels
(with almost LoS) for 6-RB PRS.◦ In urban channels, lower than 12 m only for high signal bandwidths.
• New 2D joint ML (2D-JML) time-delay and channel estimator:◦ Novel hybrid-tap channel estimation model to counteract critical
impact of close-in multipath over TDE.◦ CRB derived for the channel estimation models.◦ 2D-JML TDE outperforms 1D-JML TDE in most of the cases studied.
• Practical validation with real LTE signal emulated at ESA:◦ Implementation of an experimental software LTE positioning receiver.◦ Satisfactory results of 2D-JML wrt 1D-JML in urban channel for 6 RB.
• Use 2D-JML in close-in multipath, 1D-JML is sufficient for highsignal bandwidths.
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 46 of 49
Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Future work
• Adaptive joint time-delay and channel estimation:◦ To estimate adaptively the model order of the JML estimators.◦ To improve the robustness of the 2D-JML estimator against noise.
• Assessment of positioning capabilities in real LTE deployments.◦ Adapt JML estimators to dynamic propagation conditions.◦ Hybridisation of GNSS and LTE in a common SDR positioning
receiver.
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 47 of 49

Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Contributions of the thesis (1)
Performance limits of LTE positioning signals◮ J. A. del Peral-Rosado, J. A. Lopez-Salcedo, G. Seco-Granados, F. Zanier, M. Crisci,
“Preliminary Analysis of the Positioning Capabilities of the Positioning ReferenceSignals of 3GPP LTE”, 5th European Workshop on GNSS Signals and SignalProcessing, Toulouse, France, 8-9 December 2011.
◮ J. A. del Peral-Rosado, J. A. Lopez-Salcedo, G. Seco-Granados, F. Zanier, M. Crisci,“Achievable Localization Performance Accuracy of the Positioning Reference Signalof 3GPP LTE”, Proc. International Conference on Localization and GNSS(ICL-GNSS), Starnberg, Germany, 25-27 June 2012.
◮ J. A. del Peral-Rosado, J. A. Lopez-Salcedo, G. Seco-Granados, F. Zanier, M. Crisci,“Evaluation of the LTE Positioning Capabilities Under Typical Multipath Channels”,Proc. 6th Advanced Satellite Multimedia Systems Conference and 12th Workshop onSignal Processing for Space Communications (ASMS/SPSC), Baiona, Spain, 5-7September 2012.
◮ J. A. del Peral-Rosado, J. A. Lopez-Salcedo, G. Seco-Granados, F. Zanier, M. Crisci,“Analysis of Positioning Capabilities of 3GPP LTE”, Proc. 25th InternationalTechnical Meeting of The Satellite Division of the Institute of Navigation (IONGNSS), Nashville, Tennessee, USA, 17-21 September 2012.
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 48 of 49
Universitat Autònoma de BarcelonaEngineering School
SPCOMNAVSignal Processing forCommunications and Navigation
European Space Agency
- Session 8A: Signal Processing (III) -
(SPAIN)(SPAIN)
Contributions of the thesis (2)
Positioning techniques for LTE signals in multipath scenarios◮ J. A. del Peral-Rosado, J. A. Lopez-Salcedo, G. Seco-Granados, F. Zanier, M. Crisci,
“Joint Channel and Time Delay Estimation for LTE Positioning Reference Signals”,6th ESA Workshop on Satellite Navigation Technologies and European Workshop onGNSS Signals and Signal Processing (NAVITEC), Noordwijk, The Netherlands, 5-7December 2012.
◮ J. A. del Peral-Rosado, J. A. Lopez-Salcedo, G. Seco-Granados, F. Zanier, M. Crisci,“Joint Maximum Likelihood Time-Delay Estimation for LTE Positioning inMultipath Channels”, EURASIP Journal on Advances in Signal Processing, specialissue on Signal Processing Techniques for Anywhere, Anytime Positioning, Vol. 2014,no 33, pags. 1–13, 2014.
Implementation and test of an experimental LTE positioning receiver◮ J. A. del Peral-Rosado, J. A. Lopez-Salcedo, G. Seco-Granados, F. Zanier, P. Crosta,
R. Ioannides, M. Crisci, “Software-Defined Radio LTE Positioning Receiver TowardsFuture Hybrid Localization Systems”, Proc. AIAA International CommunicationSatellite Systems Conference (ICSSC), Florence, Italy, 14-17 October 2013.
Jose A. del Peral-Rosado | Universitat Autonoma de Barcelona (UAB) Ph.D. Dissertation | 49 of 49