final presentation final presentation fourth order very fast voltage regulator for rf pa performed...
TRANSCRIPT

Final PresentationFourth Order Very Fast Voltage
Regulator for RF PA
Performed by: Tomer Ben Oz Yuval Bar-Even
Guided by: Shahar Porat

Background• Mobile devices such as smartphones, tablet and laptop required to support
wireless communication, and yet, to be able to run for a long period of time with out charging.
• One of the most energy consumer in wireless module is the Power Amplifier (PA) that connected to the RF antenna.
• Recent trend to reduce the total power of the PA, is by applying Envelope tracking (ET) on the PA supply level. By using this technique, the power of the PA will be change as a results of the required power for transmitting.
• In order to apply high efficiency ET, there is a need to use Switching Voltage Regulator (SVR), and not Linear Voltage Regulator (LVR).
• In order to reduce frequency switching noise on the PA supply, a 4th order SVR is being proposed.

Project target
• Develop a 4th order, high bandwidth Switching Voltage Regulator (SVR), that will be able to supply RF PA, as describe in the figure below.

Project objectives
• Design and stabilize a high efficiency, high BW fourth order voltage regulator.
• Build a good understanding on how each component affects the stability and accuracy for the “real world” implementation of the voltage regulator.

Design Requirements• Very low power consumption.
• Ripples and overshoot of below 5%.
• SSE of at least 2%.
• Phase margin of at least 35.
• 1 [MHz] envelope tracking bandwidth.

The phases of the project
1. Simple closed loop design
2. Buck converter
3. Adding a compensator
4. Fourth order system
5. Adding Equivalent Series Resistance

Working environment
• Simulink via Matlab
• Cadence’s virtuoso.

Simple closed loop design
• Understanding The Principle
1lim
out in
out inA
AV V
AV V
𝐴

Simple closed loop design
• Advantages:• High Bandwidth• Low Overshoot• Simple to design
• Disadvantage:• Power Consumption

Buck converter - Transient
max min
(1 )
(1 )
i O O Diode
O i Diode
II I T DutyCycle
T
V V V VT DutyCycle T DutyCycle
L L
V V DutyCycle V DutyCycle
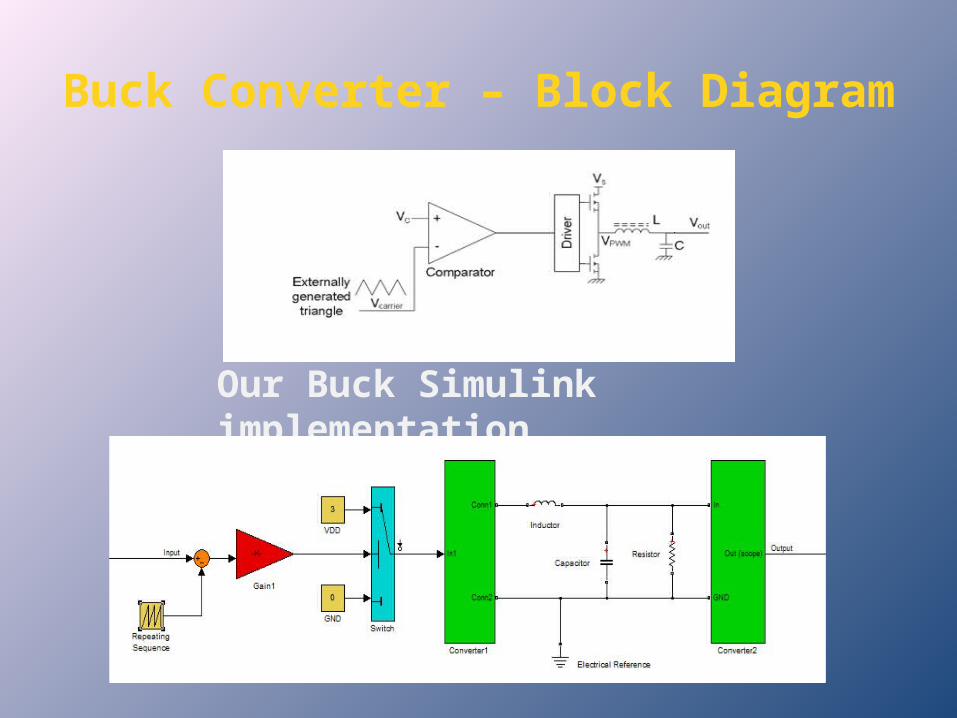
Buck Converter – Block Diagram
Our Buck Simulink implementation
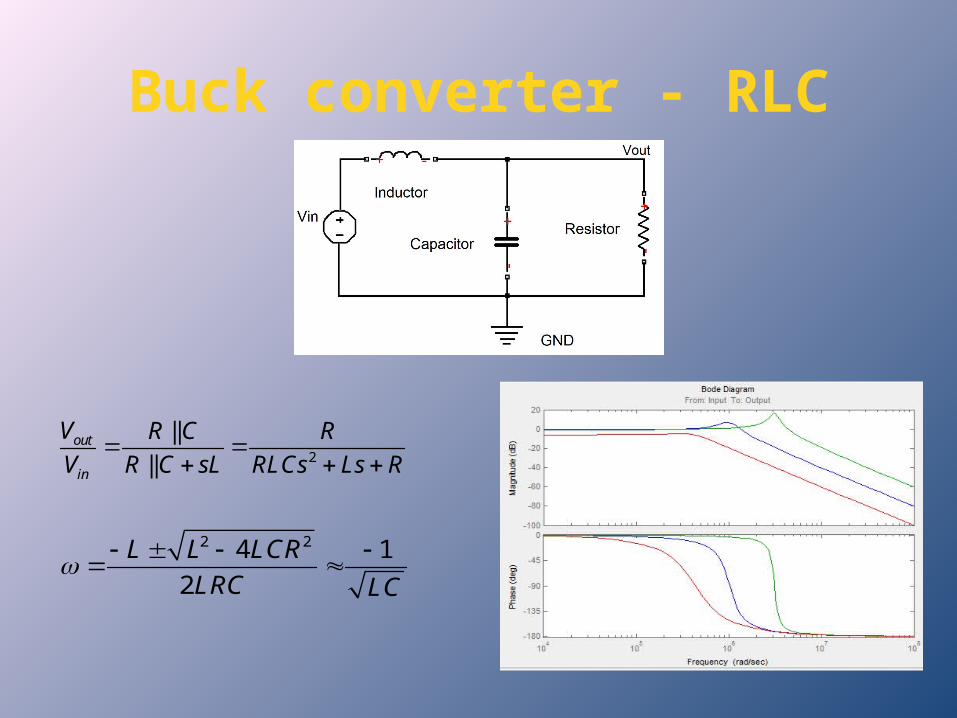
Buck converter - RLC
2
||
||out
in
V R C R
V R C sL RLCs Ls R
2 24 1
2
LCRL L
LR LC C

Buck converter - PWM
cV BDutyCycle
A B
cO DD DD
DD DDO c
V BV V DutyCycle V
A B
V V BV V
A B A B
DDO c
VV V
A
A
B
Vc

-Buck converter Frequency domain

Buck converter simulation
Buck output for given sine wave input
10switchingf
LC sin
1f
LC
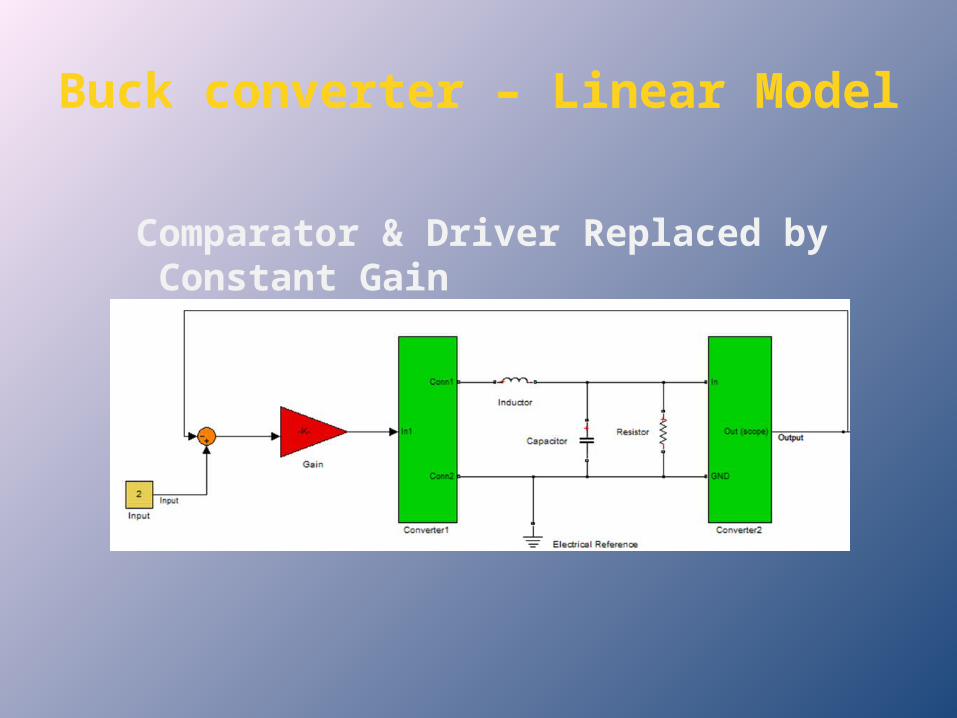
Buck converter – Linear Model
Comparator & Driver Replaced by Constant Gain

Buck converter - Open Loop Bode
On the Cross Over point the phase margin is 8

So What Is A Compensator
1 1 2 2
1 2
(1 ) (1 )Out
In
V s RC s R C
V s RC
1
2 2
2
1 1
0
1
2
1
2
Pole
Zero
Zero
f
fR C
fRC

Compensator – Bode Diagram
Locating the Zeroes give the open loop system 90boost

Considerations of choosing the locations of the Zeros
• The zeros should give a phase boost of at least 35 at the Cross Over.
• There is a need to filter the switching frequency and it requires a large attenuation.
• Increase in the difference of the zeros can move the Cross Over point 0dB.

Adding The Compensator

Adding The Compensator
On the Cross Over point the phase margin is 5

Various Components Values
Degrees of freedom in choosing the component values
Poles Location

Fourth order system
5 5
,1
5 5
,2
4 4
1
1
1
Zeros
Poles
Poles
L C
L C
L C
Canceling each other
Dominant in the TF

Fourth order system – Bode Diagram
After adding the 4th order the system is not stable – Negative phase marginCaused by adding more cross over points

Adding Equivalent Series Resistance
The ESR of the inductors add complexity to the Transfer Function but due to their low values one can consider only the damping they apply

ESR Damping Effect
As the ESR increases the damping decreases

Final Components Values
Value Name
10[MOhm] R1
0.159[pF] C1
0.1[MOhm] R2
5.59[pF] C2
300[m Ohm] RL
10[nH] L4
25.4[nF] C4
1[uH] L5
2.56 [uF] C5

Final System – Step Response
Settling time < 1[uS] OverShoot < 2%
Working Frequency – 1[MHz]Phase Margin - 53

Preparing for Part B• Achieving a good understanding of the affects
of each component to the system for:– Stability– Settling time– Sensitivity

Questions?