f.l. lewis, assoc. director for research moncrief-o’donnell endowed chair
DESCRIPTION
Sponsored by IEEE Singapore SMC, R&A, and Control Chapters. Organized and invited by Professor Sam Ge, NUS. Wireless Sensor Networks for Monitoring Machinery, Human Biofunctions, and BCW Agents. F.L. Lewis, Assoc. Director for Research Moncrief-O’Donnell Endowed Chair - PowerPoint PPT PresentationTRANSCRIPT

F.L. Lewis, Assoc. Director for ResearchMoncrief-O’Donnell Endowed Chair
Head, Controls, Sensors, MEMS Group
Automation & Robotics Research Institute (ARRI)The University of Texas at Arlington
Wireless Sensor Networks for Monitoring Machinery, Human Biofunctions, and BCW Agents
Sponsored byIEEE Singapore SMC, R&A, and Control Chapters
Organized and invited by Professor Sam Ge, NUS

Automation & Robotics Research Institute (ARRI)The University of Texas at Arlington
F.L. Lewis, Assoc. Director for ResearchMoncrief-O’Donnell Endowed Chair
Head, Controls, Sensors, MEMS Group
http://ARRI.uta.edu/acs
Discrete Event Control & Decision-Making

Discrete Event Control
Objective: Develop new DE control algorithms for decision-making, supervision, & resource assignment WITH PROOFS Apply to manufacturing workcell control, battlefield C&C systems, & internetworked systems
• Patent on Discrete Event Supervisory Controller • New DE Control Algorithms based on Matrices• Complete Dynamic Description for DE Systems• Formal Deadlock Avoidance Techniques• Implemented on Intelligent Robotic Workcell• Internet- Remote Site Control and Monitoring• USA/Mexico Collaboration• Exploring Applications to Battlefield Systems
$75K in ARO Funding for Networked Robot Workcell Control$80K in NSF Funding for research and USA/Mexico Network
USA/Mexico Internetworked Control
Man/Machine User Interface
TexasTexas
Intelligent Robot Workcell
Dr. Jose Mireles- co-PI

DE Model State Equation:
Where multiply = AND & addition = ORwhere is the task or state logic is the job sequencing matrix (Steward)
is the resource requirements matrix (Kusiak)is the input matrixis the conflict resolution matrix
Matrix Formulation: Definition
Based on Manufacturing Bill of Materials
DDucrcv uFuFrFvFx
vFrF
uFDF
x
Job Start Equation:Resource Release Equation:Product Output Equation:
xSV vs xSr rs xSy y

Meaning of MatricesResources requiredPrerequisite jobs
Nextjob
Next jobFv
Fr
Conditions fulfilled
Nextjob Sv
Releaseresource Sr
Steward’s Task Sequencing Matrix Kusiak’s Resource Requirements MatrixBill of Materials (BOM)
Conditions fulfilled

ARRI Intelligent Material Handling (IMH) Cell3 robots, 3 conveyors, two part paths
EXAMPLE

Layout of the IMH Cell
X5
X2
X8
X4
X6
X7
X3
X9
X1
R1
R3 R2
M2 M1
B3
B2
B1 A B A B
IBM robot
PUMA robotADEPT robot
Conveyorbidirectional
Conveyorunidirectional
conveyor
machinemachine

Construct Job Sequencing Matrix Fv
Part A job 1Part A job 2Part A job 3
Part B job 1Part B job 2Part B job 3
Par
t A
job
1P
art
B jo
b 1
Par
t A
job
2P
art
B jo
b 2
Par
t A
job
3P
art
B jo
b 3
Nextjobs
Prerequisitejobs
Used by Steward in ManufacturingTask Sequencing
Contains same informationas the Bill of Materials(BOM)

Construct Resource Requirements Matrix Fr
Used by Kusiak in ManufacturingResource Assignment
Contains informationabout factory resources
Nextjobs
Prerequisiteresources
Part A job 1Part A job 2Part A job 3
Part B job 1Part B job 2Part B job 3
Con
veyo
r 1
Con
veyo
r 3
Fix
ture
1
Rob
ot 1
- IB
MR
obot
2-
Pum
aR
obot
3-
Ade
pt

001
110
001
More About Fv
J2
J5
J6
J1 J3 J4
Two 1’s in same col. = Routing (Job Shop)
Two 1’s in same row = Assembly
J3
J4
J5
J1
J2
J6
001
110
001
More About Fr
J2
J5
J6
R1 R2 R3
Two 1’s in same col. = Shared Resource
Two 1’s in same row = Job needs multiple res.
J5
R2
R3
R1
J2
J6
DECISIONNEEDED!
DECISIONNEEDED!

Controller based on Matrix Formulation
Workcell
Matrix Formulation Discrete Event Controller
External events presentJobs completedResources releasedTasks completed
External EventsStart jobsStart resource releaseTask complete
Dispatchingrules
Resource allocation, task planning, task decomposition, Bill of Materials

T a s k s c o m p l e t e d
v c
R u l e - B a s e d R e a l - T i m e C o n t r o l l e r
Cucurv uFuFrFvFx
J o b s t a r t l o g i c
R e s o u r c e r e l e a s e l o g i c
W o r k C e l l
. .
.
u c
P a r t s p r e s e n t
u
R e s o u r c e r e l e a s e d
r c
P a r t s i n
p i n
S t a r t t a s k s v s
S t a r t r e s o u r c e
r e l e a s e r s
O u t p u t y
P r o d u c t s
p o u t
P l a n t c o m m a n d s P l a n t s t a t u s
D i s p a t c h i n g r u l e s
C o n t r o l l e r s t a t e m o n i t o r i n g l o g i c
xSv VS
xSr rS
xSy y T a s k c o m p l e t e l o g i c
• Formal rigorous framework• Complete DE dynamical description• Relation to known Manufacturing notions• Formal relation to other tools- Petri Nets, MAX-Plus• Easy to design, change, debug, and test• Formal deadlock analysis technique• Easy to apply any conflict resolution (dispatching) strategy• Optimization of resources• Easy to implement in any platform (MATLAB, LabVIEW, C, C+
+, visual basic, or any other)
Advantages of the Matrix Formulation

Relation to Petri NetsResources availableJobs complete
Trans. Trans.Fv Fr
Transition
Nextjobs Sv
Transition
Releaseresource Sr

pinA p1t1 t2
p3t4 t5
p2 t3
p4 t6pinB
poutA
poutB
r1
r3
r2
1000
0100
0000
0010
0001
0000
vF
0000
1000
0100
0000
0010
0001
TvS
00
00
10
00
00
01
uF
000
010
100
000
010
001
rF
010
100
000
010
001
000
TrS
10
00
00
01
00
00
TyS
p1 p2 p3 p4 r1 r2 r3
p1 p2 p3 p4 r1 r2 r3
pinA pinB
poutA poutB
Example
t1
t2
t3
t4
t5
t6
t1
t2
t3
t4
t5
t6

pinA p1t1 t2
p3t4 t5
p2 t3
p4 t6pinB
poutA
poutB
r1
r3
r2
1000
0100
0000
0010
0001
0000
x
00
00
10
00
00
01
000
010
100
000
010
001Fv
OR/AND Algebra- Locating transitions firing from current marking
1
1
1
0
0
0
1
0
0Fr Fu
1
1
0
1
0
0
0
0
0
0
0
1
0
0
0
0
0
0
= , so x =
1
1
0
1
0
1
0
0
1
0
1
0
v r u
x = i.e. fire t2 and t4

Activity Completion Matrix F:
Activity Start Matrix S:
Complete DE Dynamic Formulation
][ yrvu FFFFF
][ Ty
Tr
Tv
Tu SSSSS
],,,[ yT
yrT
rvT
vuT
uT FSFSFSFSFSM
PN Incidence Matrix:
PN marking transition equation:
Allowable marking vector:
xFStmxMtmtm TT ][)()()1(
kk mFxkyrvu POrvPIFFFF ][][

Petri Net Marking Transition Equation--need to add Job Duration Times
)()()( tmtmtm pa
)()()1( txStmtm Tpp
)()()1( txFtmtm aa
TTT OrtimesvtimesOT ],,,[
TtxSdiagttTtmdiagtT Tsamplependppend })({])([})({)1(
)()()( tmtmtm finishpp
)()()( tmtmtm finishaa
PN Marking Vector
Split transition equation in two steps
Add tokens
Subtract tokens when job complete
Add Time Duration Vector
Corresponds to Timed Places

Allows Direct Simulations- e.g. MATLAB
Jobs completedby Robot 1
Robot 1busy or idle
c.f. DE version of ODE23

pinA
p1t1 t2
p3t4 t5
p2 t3
p4 t6pinB
poutA
poutB
r1
r3
r2
1000
0100
0000
0010
0001
0000
x
00
00
10
00
00
01
000
010
100
000
010
001Fv
Conflict Resolution for Shared Resources
1
0
1
0
1
0
1
0
0
Fr Fu
1
0
0
1
0
0
0
0
1
0
0
1
0
0
0
0
0
0
= , so x =
1
0
1
1
0
1
0
1
0
0
1
0
v r u
Which one to fire?
But gives negativemarking!Cannot fire both.
Shared Resource- Two entries in same column

pinAp1t1 t2
p3t4 t5
p2 t3
p4 t6pinB
poutA
poutB
r1
r3
r2
1000
0100
0000
0010
0001
0000
x
00
00
10
00
00
01
000
010
100
000
010
001Fv
Conflict resolution, add extra CR input and new matrix Fuc:
1
0
1
0
1
0
1
0
0
Fr Fu
1
0
0
1
0
0
0
0
1
0
0
1
0
0
0
0
0
0
= , so x =
1
0
1
1
1
1
0
1
0
0
0
0
v r u
00
10
00
00
01
00Fuc r2
0
1
Now only t5 fires
0
0
0
0
1
0
r2

Application- Intelligent Material Handling
Adept
Puma
CRS
12 Sensors!!
Machine 2
Machine 1
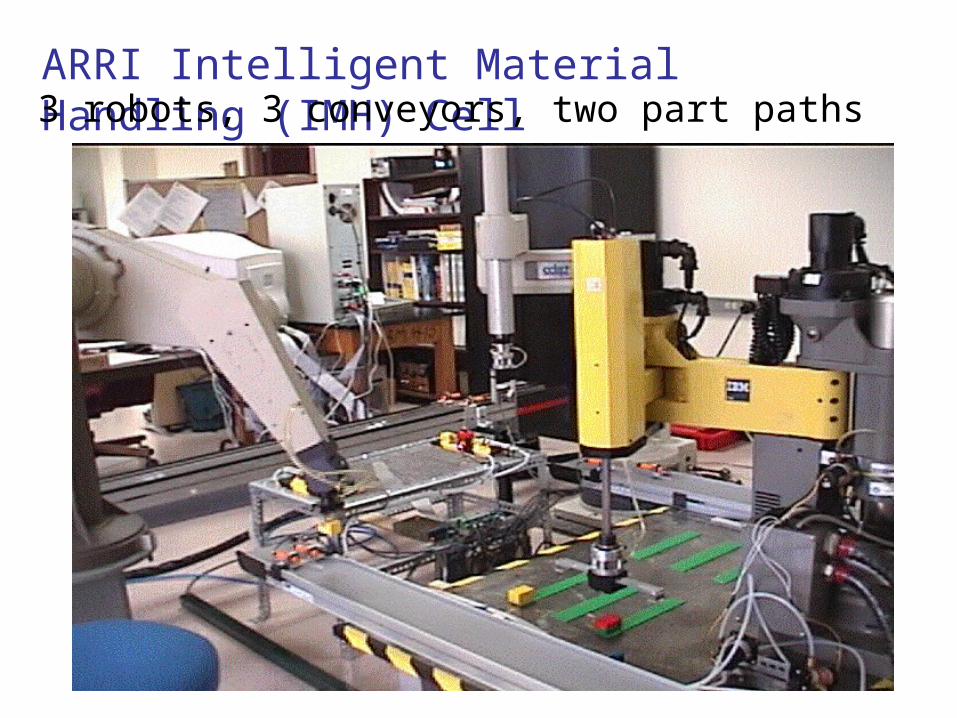
ARRI Intelligent Material Handling (IMH) Cell3 robots, 3 conveyors, two part paths

Layout of the IMH Cell
X5
X2
X8
X4
X6
X7
X3
X9
X1
R1
R3 R2
M2 M1
B3
B2
B1 A B A B
IBM robot
PUMA robotADEPT robot
Conveyorbidirectional
Conveyorunidirectional
conveyor
machinemachine

Multipart Reentrant Flow Line
PART B OUT PART A OUT PART A PART B
CRS
ROBOT 1
ROBOT 2
ROBOT 3
Machine 1
Machine 2
A(1)R1
A(2)R1
B(1)R1
B(2)R1
A(1)R2
A(2)R2
B(1)R2
B(1)R3
B(2)R3 A(1)R3
PUMA
ADEPT
c.f. Kumar

Petri Net flow chart
R1U1
B1AA
B1AS R2U1
M1A
M1P
B2AA B3AA
R2U3 B2AS R3U1 B3AS R1U3 PAO
B1BA B2BA M2A B3BA
PBI R1U2 B1BS R2U2 B2BS R3U2 M2P R3U3 B3BS R1U4 PBO
R1A
R2A R3A
X1 X2 X3 X4 X5 X6 X7 X8 X9
X12 X13 X14 X15 X16 X17 X18 X19 X11 X20
PAI X10

Start tasks/jobs
PC with High Level Controller
Dispatching rules
To Generate uc
Tasks: v SA
controller
controller
controller
CRS Puma 560 ADEPT One
Low level PD & PID controllers
Robots
Medium Level Tasks Controllers
RS232 - 1 RS232 - 2 RS232 - 3
Robot 1 Task 4
Task 3
Task 2
Task 1
Robot 2 Task 3
Task 2
Task 1
Robot 3 Task 3
Task 2
Task 1
SA v ~ Workcell data gathering
u
v
r
p
Sensors Machines
SB S in v r p ~ , ~ , ~
Jobs v SB
r SB
r SA , p in
Parts out
v SB
DAQ - card Analog & digital I/0
Rule - Based Real - Time Controller Controller state monitoring logic
C u D D u r v u F u F u F r F v F x C
Job start logic S v =S v x
Task complete logic y =S y x
Resource release logic x S r r s
uc c.f. SaridisJim Albus

LabVIEW diagram of Controller

LabVIEW Controller's interface:
FrFv
Resources

R1u1
R1u2
R1u3
R1u4
R2u1
R2u2
R2u3
R3u1
R3u2
Discrete events
Results of LabVIEW Implementation on Actual Workcell
Compare with MATLAB simulation!
We can now simulate a DE controller and then implement it,Exactly as for continuous state controllers!!

U.S.-Mexico shared research
DE control via internet
Using Matrix DEC in LabVIEW
Texas