fusion here, there and almost everywhere in computer...
TRANSCRIPT

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fusion here, there and almostEVERYWHERE in computer vision - driving
new advances in fuzzy integrals
Derek T. Anderson
Associate ProfessorRobert D. Guyton Chair
Co-Director of Sensor Analysis and Intelligence Laboratory (SAIL)Electrical and Computer Engineering Department
Mississippi State University, MS, USA
FUZZ-IEEE, July 2017
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
What I hope to achieve today
Convince you that
I fusion is needed EVERYWHERE incomputer vision (CV)
I fuzzy integrals (FI) are a flexible tool fornumerous CV challenges
I Most importantly ... CV presents newinteresting theoretical and appliedchallenges in fusion that need solving
Disclaimer: focus is on (1) fusion AND (2) CV, not just CVResource: open source Octave/Matlab FI and CV library
http://derektanderson.com/FuzzyLibrary/
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU
Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
What I hope to achieve today
Convince you that
I fusion is needed EVERYWHERE incomputer vision (CV)
I fuzzy integrals (FI) are a flexible tool fornumerous CV challenges
I Most importantly ... CV presents newinteresting theoretical and appliedchallenges in fusion that need solving
Disclaimer: focus is on (1) fusion AND (2) CV, not just CVResource: open source Octave/Matlab FI and CV library
http://derektanderson.com/FuzzyLibrary/
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
What I hope to achieve today
Convince you that
I fusion is needed EVERYWHERE incomputer vision (CV)
I fuzzy integrals (FI) are a flexible tool fornumerous CV challenges
I Most importantly ... CV presents newinteresting theoretical and appliedchallenges in fusion that need solving
Disclaimer: focus is on (1) fusion AND (2) CV, not just CVResource: open source Octave/Matlab FI and CV library
http://derektanderson.com/FuzzyLibrary/
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
What I hope to achieve today
Convince you that
I fusion is needed EVERYWHERE incomputer vision (CV)
I fuzzy integrals (FI) are a flexible tool fornumerous CV challenges
I Most importantly ... CV presents newinteresting theoretical and appliedchallenges in fusion that need solving
Disclaimer: focus is on (1) fusion AND (2) CV, not just CVResource: open source Octave/Matlab FI and CV library
http://derektanderson.com/FuzzyLibrary/
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
What I hope to achieve today
Convince you that
I fusion is needed EVERYWHERE incomputer vision (CV)
I fuzzy integrals (FI) are a flexible tool fornumerous CV challenges
I Most importantly ... CV presents newinteresting theoretical and appliedchallenges in fusion that need solving
Disclaimer: focus is on (1) fusion AND (2) CV, not just CV
Resource: open source Octave/Matlab FI and CV libraryhttp://derektanderson.com/FuzzyLibrary/
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
What I hope to achieve today
Convince you that
I fusion is needed EVERYWHERE incomputer vision (CV)
I fuzzy integrals (FI) are a flexible tool fornumerous CV challenges
I Most importantly ... CV presents newinteresting theoretical and appliedchallenges in fusion that need solving
Disclaimer: focus is on (1) fusion AND (2) CV, not just CVResource: open source Octave/Matlab FI and CV library
http://derektanderson.com/FuzzyLibrary/
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
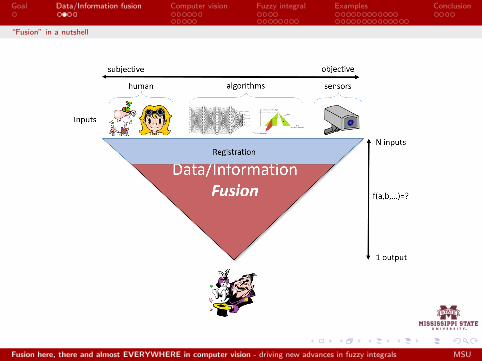
“Fusion” in a nutshell
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU
Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
“Fusion” in a nutshell
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
“Fusion” in a nutshell
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
“Fusion” in a nutshell
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
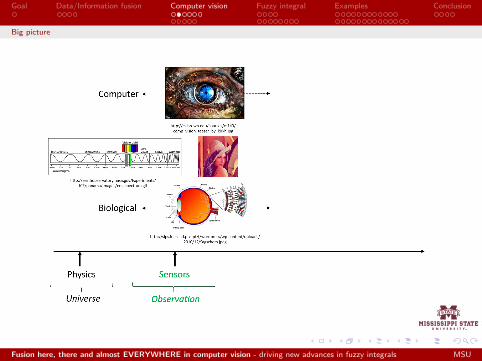
Big picture
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU
Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Big picture
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Big picture
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Big picture
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Big picture
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Big picture
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU
Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
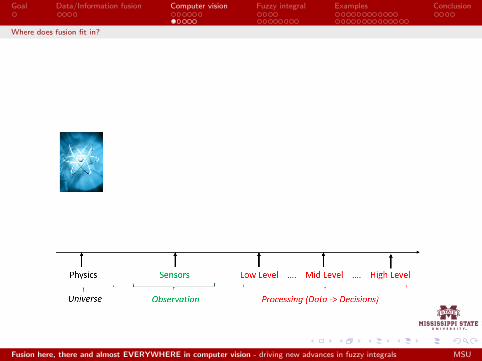
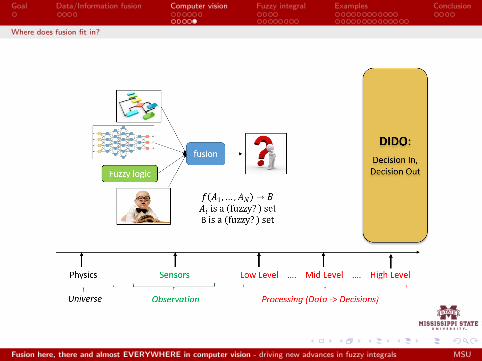
Where does fusion fit in?
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Where does fusion fit in?
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Where does fusion fit in?
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Where does fusion fit in?
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU
Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Where does fusion fit in?
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy measure
What is the question? e.g., wittiness
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy measure
What is the question? e.g., wittiness
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy measure
What is the question? e.g., wittiness
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy measure
Discrete (finite X ) fuzzy measure (FM)
Let X = {x1, x2, . . . , xN} be a set of N inputs from sources such asexperts, algorithms and/or sensors. A FM is a monotonic functiondefined on the power set of X , 2X , as µ : 2X → R+ that satisfiesthe following:
I (boundary condition) µ(∅) = 0,
I (monotonicity) if A,B ⊆ X and A ⊆ B, µ(A) ≤ µ(B).
RemarkOften, an additional constraint is imposed on the FM in practice tolimit the upper bound to 1, i.e., µ(X ) = 1.
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy measure
Discrete (finite X ) fuzzy measure (FM)
Let X = {x1, x2, . . . , xN} be a set of N inputs from sources such asexperts, algorithms and/or sensors. A FM is a monotonic functiondefined on the power set of X , 2X , as µ : 2X → R+ that satisfiesthe following:
I (boundary condition) µ(∅) = 0,
I (monotonicity) if A,B ⊆ X and A ⊆ B, µ(A) ≤ µ(B).
RemarkOften, an additional constraint is imposed on the FM in practice tolimit the upper bound to 1, i.e., µ(X ) = 1.
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy measure
Discrete (finite X ) fuzzy measure (FM)
Let X = {x1, x2, . . . , xN} be a set of N inputs from sources such asexperts, algorithms and/or sensors. A FM is a monotonic functiondefined on the power set of X , 2X , as µ : 2X → R+ that satisfiesthe following:
I (boundary condition) µ(∅) = 0,
I (monotonicity) if A,B ⊆ X and A ⊆ B, µ(A) ≤ µ(B).
RemarkOften, an additional constraint is imposed on the FM in practice tolimit the upper bound to 1, i.e., µ(X ) = 1.
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU
Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy measure
Discrete (finite X ) fuzzy measure (FM)
Let X = {x1, x2, . . . , xN} be a set of N inputs from sources such asexperts, algorithms and/or sensors. A FM is a monotonic functiondefined on the power set of X , 2X , as µ : 2X → R+ that satisfiesthe following:
I (boundary condition) µ(∅) = 0,
I (monotonicity) if A,B ⊆ X and A ⊆ B, µ(A) ≤ µ(B).
RemarkOften, an additional constraint is imposed on the FM in practice tolimit the upper bound to 1, i.e., µ(X ) = 1.
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
Discrete (finite X ) fuzzy Choquet integral (ChI)
Let h(xi ) ∈ X be the data/information (e.g., sensor readings, CValgorithm outputs, etc.) from input i . The ChI is∫
Ch ◦ µ = Cµ(h) =
N∑i=1
h(xπ(i)) [µ(Ai )− µ(Ai−1)],
where π is a permutation of X , such that
h(xπ(1)) ≥ h(xπ(2)) ≥ . . . ≥ h(xπ(N)),
Ai = {xπ(1), . . . , xπ(i)} and µ(A0) = 0.
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
Discrete (finite X ) fuzzy Choquet integral (ChI)
Let h(xi ) ∈ X be the data/information (e.g., sensor readings, CValgorithm outputs, etc.) from input i . The ChI is∫
Ch ◦ µ = Cµ(h) =
N∑i=1
h(xπ(i)) [µ(Ai )− µ(Ai−1)],
where π is a permutation of X , such that
h(xπ(1)) ≥ h(xπ(2)) ≥ . . . ≥ h(xπ(N)),
Ai = {xπ(1), . . . , xπ(i)} and µ(A0) = 0.
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
Discrete (finite X ) fuzzy Choquet integral (ChI)
Let h(xi ) ∈ X be the data/information (e.g., sensor readings, CValgorithm outputs, etc.) from input i . The ChI is∫
Ch ◦ µ = Cµ(h) =
N∑i=1
h(xπ(i)) [µ(Ai )− µ(Ai−1)],
where π is a permutation of X , such that
h(xπ(1)) ≥ h(xπ(2)) ≥ . . . ≥ h(xπ(N)),
Ai = {xπ(1), . . . , xπ(i)} and µ(A0) = 0.
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
Single instance of FI: e.g., N = 3 and h(x2) ≥ h(x1) ≥ h(x3)
{x2}
{}
{x1,x2}
{x1,x2,x3}
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU
Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
What, use a method from Calculus ...
Truly innovativeI In particular, when X 6= <
I Sensors: let X be x1 =Radar, x2 =EMI, x3 =LWIRI CV: let X be ten different image featuresI CV: let X be three different deep learning architecturesI Experts: let X be x1 =Derek, x2 =Muhammad, x3 =TonyI What is µ ({Derek, Muhammad}) ... ?I Correlation, belief, utility, etc.I Is h and µ subjective or objective ...?
I Where does µ come from?I Pick µ, get a specific aggregation operatorI Continuous (|X | is (uncountably) infinite) and analyticalI Discrete (|X | is finite) and data-driven or expert
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
What, use a method from Calculus ...Truly innovative
I In particular, when X 6= <I Sensors: let X be x1 =Radar, x2 =EMI, x3 =LWIRI CV: let X be ten different image featuresI CV: let X be three different deep learning architecturesI Experts: let X be x1 =Derek, x2 =Muhammad, x3 =TonyI What is µ ({Derek, Muhammad}) ... ?I Correlation, belief, utility, etc.I Is h and µ subjective or objective ...?
I Where does µ come from?I Pick µ, get a specific aggregation operatorI Continuous (|X | is (uncountably) infinite) and analyticalI Discrete (|X | is finite) and data-driven or expert
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
What, use a method from Calculus ...Truly innovative
I In particular, when X 6= <
I Sensors: let X be x1 =Radar, x2 =EMI, x3 =LWIRI CV: let X be ten different image featuresI CV: let X be three different deep learning architecturesI Experts: let X be x1 =Derek, x2 =Muhammad, x3 =TonyI What is µ ({Derek, Muhammad}) ... ?I Correlation, belief, utility, etc.I Is h and µ subjective or objective ...?
I Where does µ come from?I Pick µ, get a specific aggregation operatorI Continuous (|X | is (uncountably) infinite) and analyticalI Discrete (|X | is finite) and data-driven or expert
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU
Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
What, use a method from Calculus ...Truly innovative
I In particular, when X 6= <I Sensors: let X be x1 =Radar, x2 =EMI, x3 =LWIR
I CV: let X be ten different image featuresI CV: let X be three different deep learning architecturesI Experts: let X be x1 =Derek, x2 =Muhammad, x3 =TonyI What is µ ({Derek, Muhammad}) ... ?I Correlation, belief, utility, etc.I Is h and µ subjective or objective ...?
I Where does µ come from?I Pick µ, get a specific aggregation operatorI Continuous (|X | is (uncountably) infinite) and analyticalI Discrete (|X | is finite) and data-driven or expert
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
What, use a method from Calculus ...Truly innovative
I In particular, when X 6= <I Sensors: let X be x1 =Radar, x2 =EMI, x3 =LWIRI CV: let X be ten different image features
I CV: let X be three different deep learning architecturesI Experts: let X be x1 =Derek, x2 =Muhammad, x3 =TonyI What is µ ({Derek, Muhammad}) ... ?I Correlation, belief, utility, etc.I Is h and µ subjective or objective ...?
I Where does µ come from?I Pick µ, get a specific aggregation operatorI Continuous (|X | is (uncountably) infinite) and analyticalI Discrete (|X | is finite) and data-driven or expert
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
What, use a method from Calculus ...Truly innovative
I In particular, when X 6= <I Sensors: let X be x1 =Radar, x2 =EMI, x3 =LWIRI CV: let X be ten different image featuresI CV: let X be three different deep learning architectures
I Experts: let X be x1 =Derek, x2 =Muhammad, x3 =TonyI What is µ ({Derek, Muhammad}) ... ?I Correlation, belief, utility, etc.I Is h and µ subjective or objective ...?
I Where does µ come from?I Pick µ, get a specific aggregation operatorI Continuous (|X | is (uncountably) infinite) and analyticalI Discrete (|X | is finite) and data-driven or expert
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
What, use a method from Calculus ...Truly innovative
I In particular, when X 6= <I Sensors: let X be x1 =Radar, x2 =EMI, x3 =LWIRI CV: let X be ten different image featuresI CV: let X be three different deep learning architecturesI Experts: let X be x1 =Derek, x2 =Muhammad, x3 =Tony
I What is µ ({Derek, Muhammad}) ... ?I Correlation, belief, utility, etc.I Is h and µ subjective or objective ...?
I Where does µ come from?I Pick µ, get a specific aggregation operatorI Continuous (|X | is (uncountably) infinite) and analyticalI Discrete (|X | is finite) and data-driven or expert
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
What, use a method from Calculus ...Truly innovative
I In particular, when X 6= <I Sensors: let X be x1 =Radar, x2 =EMI, x3 =LWIRI CV: let X be ten different image featuresI CV: let X be three different deep learning architecturesI Experts: let X be x1 =Derek, x2 =Muhammad, x3 =TonyI What is µ ({Derek, Muhammad}) ... ?
I Correlation, belief, utility, etc.I Is h and µ subjective or objective ...?
I Where does µ come from?I Pick µ, get a specific aggregation operatorI Continuous (|X | is (uncountably) infinite) and analyticalI Discrete (|X | is finite) and data-driven or expert
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
What, use a method from Calculus ...Truly innovative
I In particular, when X 6= <I Sensors: let X be x1 =Radar, x2 =EMI, x3 =LWIRI CV: let X be ten different image featuresI CV: let X be three different deep learning architecturesI Experts: let X be x1 =Derek, x2 =Muhammad, x3 =TonyI What is µ ({Derek, Muhammad}) ... ?I Correlation, belief, utility, etc.
I Is h and µ subjective or objective ...?
I Where does µ come from?I Pick µ, get a specific aggregation operatorI Continuous (|X | is (uncountably) infinite) and analyticalI Discrete (|X | is finite) and data-driven or expert
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
What, use a method from Calculus ...Truly innovative
I In particular, when X 6= <I Sensors: let X be x1 =Radar, x2 =EMI, x3 =LWIRI CV: let X be ten different image featuresI CV: let X be three different deep learning architecturesI Experts: let X be x1 =Derek, x2 =Muhammad, x3 =TonyI What is µ ({Derek, Muhammad}) ... ?I Correlation, belief, utility, etc.I Is h and µ subjective or objective ...?
I Where does µ come from?I Pick µ, get a specific aggregation operatorI Continuous (|X | is (uncountably) infinite) and analyticalI Discrete (|X | is finite) and data-driven or expert
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
What, use a method from Calculus ...Truly innovative
I In particular, when X 6= <I Sensors: let X be x1 =Radar, x2 =EMI, x3 =LWIRI CV: let X be ten different image featuresI CV: let X be three different deep learning architecturesI Experts: let X be x1 =Derek, x2 =Muhammad, x3 =TonyI What is µ ({Derek, Muhammad}) ... ?I Correlation, belief, utility, etc.I Is h and µ subjective or objective ...?
I Where does µ come from?
I Pick µ, get a specific aggregation operatorI Continuous (|X | is (uncountably) infinite) and analyticalI Discrete (|X | is finite) and data-driven or expert
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU
Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
What, use a method from Calculus ...Truly innovative
I In particular, when X 6= <I Sensors: let X be x1 =Radar, x2 =EMI, x3 =LWIRI CV: let X be ten different image featuresI CV: let X be three different deep learning architecturesI Experts: let X be x1 =Derek, x2 =Muhammad, x3 =TonyI What is µ ({Derek, Muhammad}) ... ?I Correlation, belief, utility, etc.I Is h and µ subjective or objective ...?
I Where does µ come from?I Pick µ, get a specific aggregation operator
I Continuous (|X | is (uncountably) infinite) and analyticalI Discrete (|X | is finite) and data-driven or expert
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
What, use a method from Calculus ...Truly innovative
I In particular, when X 6= <I Sensors: let X be x1 =Radar, x2 =EMI, x3 =LWIRI CV: let X be ten different image featuresI CV: let X be three different deep learning architecturesI Experts: let X be x1 =Derek, x2 =Muhammad, x3 =TonyI What is µ ({Derek, Muhammad}) ... ?I Correlation, belief, utility, etc.I Is h and µ subjective or objective ...?
I Where does µ come from?I Pick µ, get a specific aggregation operatorI Continuous (|X | is (uncountably) infinite) and analytical
I Discrete (|X | is finite) and data-driven or expert
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
What, use a method from Calculus ...Truly innovative
I In particular, when X 6= <I Sensors: let X be x1 =Radar, x2 =EMI, x3 =LWIRI CV: let X be ten different image featuresI CV: let X be three different deep learning architecturesI Experts: let X be x1 =Derek, x2 =Muhammad, x3 =TonyI What is µ ({Derek, Muhammad}) ... ?I Correlation, belief, utility, etc.I Is h and µ subjective or objective ...?
I Where does µ come from?I Pick µ, get a specific aggregation operatorI Continuous (|X | is (uncountably) infinite) and analyticalI Discrete (|X | is finite) and data-driven or expert
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
How I like to conceptualize the discrete FI
Set of aggregation functions: ~wi for πi , ∀i ∈ [1, ...,N!]
fi = wi (1)h(xπi (1))+wi (2)h(xπi (2)) + ...+wi (N)h(xπi (N))
N∑k=1
wi (k) = 1
Example: let N = 3 and sort order h(x1) ≥ h(x2) ≥ h(x3)
w(1) =µ({x1})− 0,w(2) =µ({x1, x2})− µ({x1}),w(3) =µ({x1, x2, x3})− µ({x1, x2}).
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
How I like to conceptualize the discrete FI
Set of aggregation functions: ~wi for πi , ∀i ∈ [1, ...,N!]
fi = wi (1)h(xπi (1))+wi (2)h(xπi (2)) + ...+wi (N)h(xπi (N))
N∑k=1
wi (k) = 1
Example: let N = 3 and sort order h(x1) ≥ h(x2) ≥ h(x3)
w(1) =µ({x1})− 0,w(2) =µ({x1, x2})− µ({x1}),w(3) =µ({x1, x2, x3})− µ({x1, x2}).
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
How I like to conceptualize the discrete FI
Set of aggregation functions: ~wi for πi , ∀i ∈ [1, ...,N!]
fi = wi (1)h(xπi (1))+wi (2)h(xπi (2)) + ...+wi (N)h(xπi (N))
N∑k=1
wi (k) = 1
Example: let N = 3 and sort order h(x1) ≥ h(x2) ≥ h(x3)
w(1) =µ({x1})− 0,w(2) =µ({x1, x2})− µ({x1}),w(3) =µ({x1, x2, x3})− µ({x1, x2}).
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
Visualization and visitation: single instance1
{x2}
{}
{x1,x2}
{x1,x2,x3}
1Visualization and Learning of the Choquet Integral With Limited Training Data, FUZZ-IEEE 2017
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
Visualization and visitation: data-driven2
{x2}
{}
{x1,x2}
{x1,x2,x3}
Lots of visitations
Low-to-no visitations
Lots of visitations
Low-to-no visitations
N=10
2Visualization and Learning of the Choquet Integral With Limited Training Data, FUZZ-IEEE 2017
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
Simplifications - Case 1: LCOS, S-Decomp., λ-FM, etc.
A linear combination of order statistics (LCOS) is a ChI s.t.,
µ(A) = µ(B),∀A,B ∈ 2X such that |A| = |B|.
So, N! operators reduce to one operator. For example,
~w t = (1, 0, ..., 0)t
is the maximum operator
µ(∅) = 0 and µ(A) = 1,∀A ∈ 2X except ∅,
h(xπ(1)) [µ(A1)− µ(A0)] + ...+ h(xπ(N)) [µ(AN)− µ(AN−1)] ,
h(xπ(1)) [1] + 0 + ...+ 0.
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
Simplifications - Case 1: LCOS, S-Decomp., λ-FM, etc.
A linear combination of order statistics (LCOS) is a ChI s.t.,
µ(A) = µ(B),∀A,B ∈ 2X such that |A| = |B|.
So, N! operators reduce to one operator. For example,
~w t = (1, 0, ..., 0)t
is the maximum operator
µ(∅) = 0 and µ(A) = 1,∀A ∈ 2X except ∅,
h(xπ(1)) [µ(A1)− µ(A0)] + ...+ h(xπ(N)) [µ(AN)− µ(AN−1)] ,
h(xπ(1)) [1] + 0 + ...+ 0.
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
Simplifications - Case 1: LCOS, S-Decomp., λ-FM, etc.
A linear combination of order statistics (LCOS) is a ChI s.t.,
µ(A) = µ(B),∀A,B ∈ 2X such that |A| = |B|.
So, N! operators reduce to one operator. For example,
~w t = (1, 0, ..., 0)t
is the maximum operator
µ(∅) = 0 and µ(A) = 1, ∀A ∈ 2X except ∅,
h(xπ(1)) [µ(A1)− µ(A0)] + ...+ h(xπ(N)) [µ(AN)− µ(AN−1)] ,
h(xπ(1)) [1] + 0 + ...+ 0.
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
Simplifications - Case 2: Binary FM/FI3,4
Simple, µ(A) ∈ {0, 1}, ∀A ⊆ 2X versus [0, 1].
I Efficient: few variables and just one ChI termI Maximum number of terms is
(N
N/2
), likely MUCH smaller
I Trivial to prove that∑N
i=1 (µ(Ai )− µ(Ai−1)) = 1I∑
i∈A1(0− 0)hπ(i)+ (1− 0)hπ(|A1|+1) +
∑k∈A2
(1− 1)hπ(k)
I Properties: Sugeno integral == ChI
I Understanding: best pessimistic agreementI Example: let x1=radar, x2=LWIR, x3=EMI
I Let µ(x1) = µ(x2) = µ(x3) = 0 and µ({x2, x3}) = 0, else 1I h(x1) =0.8, h(x2) = 0.5, h(x3) = 0.01, BChI is 0.5.I If radar is highest, need LWIR confirmation, disregard EMI
3Binary Fuzzy Measures and Choquet Integration for Multi-Source Fusion, ICMT, 2017
4Multiple Instance Choquet Integral for Classifier Fusion, FUZZ-IEEE, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
Simplifications - Case 2: Binary FM/FI3,4
Simple, µ(A) ∈ {0, 1}, ∀A ⊆ 2X versus [0, 1].I Efficient: few variables and just one ChI term
I Maximum number of terms is(
NN/2
), likely MUCH smaller
I Trivial to prove that∑N
i=1 (µ(Ai )− µ(Ai−1)) = 1I∑
i∈A1(0− 0)hπ(i)+ (1− 0)hπ(|A1|+1) +
∑k∈A2
(1− 1)hπ(k)
I Properties: Sugeno integral == ChI
I Understanding: best pessimistic agreementI Example: let x1=radar, x2=LWIR, x3=EMI
I Let µ(x1) = µ(x2) = µ(x3) = 0 and µ({x2, x3}) = 0, else 1I h(x1) =0.8, h(x2) = 0.5, h(x3) = 0.01, BChI is 0.5.I If radar is highest, need LWIR confirmation, disregard EMI
3Binary Fuzzy Measures and Choquet Integration for Multi-Source Fusion, ICMT, 2017
4Multiple Instance Choquet Integral for Classifier Fusion, FUZZ-IEEE, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU
Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
Simplifications - Case 2: Binary FM/FI3,4
Simple, µ(A) ∈ {0, 1}, ∀A ⊆ 2X versus [0, 1].I Efficient: few variables and just one ChI term
I Maximum number of terms is(
NN/2
), likely MUCH smaller
I Trivial to prove that∑N
i=1 (µ(Ai )− µ(Ai−1)) = 1
I∑
i∈A1(0− 0)hπ(i)+ (1− 0)hπ(|A1|+1) +
∑k∈A2
(1− 1)hπ(k)
I Properties: Sugeno integral == ChI
I Understanding: best pessimistic agreementI Example: let x1=radar, x2=LWIR, x3=EMI
I Let µ(x1) = µ(x2) = µ(x3) = 0 and µ({x2, x3}) = 0, else 1I h(x1) =0.8, h(x2) = 0.5, h(x3) = 0.01, BChI is 0.5.I If radar is highest, need LWIR confirmation, disregard EMI
3Binary Fuzzy Measures and Choquet Integration for Multi-Source Fusion, ICMT, 2017
4Multiple Instance Choquet Integral for Classifier Fusion, FUZZ-IEEE, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
Simplifications - Case 2: Binary FM/FI3,4
Simple, µ(A) ∈ {0, 1}, ∀A ⊆ 2X versus [0, 1].I Efficient: few variables and just one ChI term
I Maximum number of terms is(
NN/2
), likely MUCH smaller
I Trivial to prove that∑N
i=1 (µ(Ai )− µ(Ai−1)) = 1I∑
i∈A1(0− 0)hπ(i)+ (1− 0)hπ(|A1|+1) +
∑k∈A2
(1− 1)hπ(k)
I Properties: Sugeno integral == ChI
I Understanding: best pessimistic agreementI Example: let x1=radar, x2=LWIR, x3=EMI
I Let µ(x1) = µ(x2) = µ(x3) = 0 and µ({x2, x3}) = 0, else 1I h(x1) =0.8, h(x2) = 0.5, h(x3) = 0.01, BChI is 0.5.I If radar is highest, need LWIR confirmation, disregard EMI
3Binary Fuzzy Measures and Choquet Integration for Multi-Source Fusion, ICMT, 2017
4Multiple Instance Choquet Integral for Classifier Fusion, FUZZ-IEEE, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
Simplifications - Case 2: Binary FM/FI3,4
Simple, µ(A) ∈ {0, 1}, ∀A ⊆ 2X versus [0, 1].I Efficient: few variables and just one ChI term
I Maximum number of terms is(
NN/2
), likely MUCH smaller
I Trivial to prove that∑N
i=1 (µ(Ai )− µ(Ai−1)) = 1I∑
i∈A1(0− 0)hπ(i)+ (1− 0)hπ(|A1|+1) +
∑k∈A2
(1− 1)hπ(k)
I Properties: Sugeno integral == ChI
I Understanding: best pessimistic agreementI Example: let x1=radar, x2=LWIR, x3=EMI
I Let µ(x1) = µ(x2) = µ(x3) = 0 and µ({x2, x3}) = 0, else 1I h(x1) =0.8, h(x2) = 0.5, h(x3) = 0.01, BChI is 0.5.I If radar is highest, need LWIR confirmation, disregard EMI
3Binary Fuzzy Measures and Choquet Integration for Multi-Source Fusion, ICMT, 2017
4Multiple Instance Choquet Integral for Classifier Fusion, FUZZ-IEEE, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
Simplifications - Case 2: Binary FM/FI3,4
Simple, µ(A) ∈ {0, 1}, ∀A ⊆ 2X versus [0, 1].I Efficient: few variables and just one ChI term
I Maximum number of terms is(
NN/2
), likely MUCH smaller
I Trivial to prove that∑N
i=1 (µ(Ai )− µ(Ai−1)) = 1I∑
i∈A1(0− 0)hπ(i)+ (1− 0)hπ(|A1|+1) +
∑k∈A2
(1− 1)hπ(k)
I Properties: Sugeno integral == ChI
I Understanding: best pessimistic agreement
I Example: let x1=radar, x2=LWIR, x3=EMII Let µ(x1) = µ(x2) = µ(x3) = 0 and µ({x2, x3}) = 0, else 1I h(x1) =0.8, h(x2) = 0.5, h(x3) = 0.01, BChI is 0.5.I If radar is highest, need LWIR confirmation, disregard EMI
3Binary Fuzzy Measures and Choquet Integration for Multi-Source Fusion, ICMT, 2017
4Multiple Instance Choquet Integral for Classifier Fusion, FUZZ-IEEE, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
Simplifications - Case 2: Binary FM/FI3,4
Simple, µ(A) ∈ {0, 1}, ∀A ⊆ 2X versus [0, 1].I Efficient: few variables and just one ChI term
I Maximum number of terms is(
NN/2
), likely MUCH smaller
I Trivial to prove that∑N
i=1 (µ(Ai )− µ(Ai−1)) = 1I∑
i∈A1(0− 0)hπ(i)+ (1− 0)hπ(|A1|+1) +
∑k∈A2
(1− 1)hπ(k)
I Properties: Sugeno integral == ChI
I Understanding: best pessimistic agreementI Example: let x1=radar, x2=LWIR, x3=EMI
I Let µ(x1) = µ(x2) = µ(x3) = 0 and µ({x2, x3}) = 0, else 1
I h(x1) =0.8, h(x2) = 0.5, h(x3) = 0.01, BChI is 0.5.I If radar is highest, need LWIR confirmation, disregard EMI
3Binary Fuzzy Measures and Choquet Integration for Multi-Source Fusion, ICMT, 2017
4Multiple Instance Choquet Integral for Classifier Fusion, FUZZ-IEEE, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
Simplifications - Case 2: Binary FM/FI3,4
Simple, µ(A) ∈ {0, 1}, ∀A ⊆ 2X versus [0, 1].I Efficient: few variables and just one ChI term
I Maximum number of terms is(
NN/2
), likely MUCH smaller
I Trivial to prove that∑N
i=1 (µ(Ai )− µ(Ai−1)) = 1I∑
i∈A1(0− 0)hπ(i)+ (1− 0)hπ(|A1|+1) +
∑k∈A2
(1− 1)hπ(k)
I Properties: Sugeno integral == ChI
I Understanding: best pessimistic agreementI Example: let x1=radar, x2=LWIR, x3=EMI
I Let µ(x1) = µ(x2) = µ(x3) = 0 and µ({x2, x3}) = 0, else 1I h(x1) =0.8, h(x2) = 0.5, h(x3) = 0.01, BChI is 0.5.
I If radar is highest, need LWIR confirmation, disregard EMI
3Binary Fuzzy Measures and Choquet Integration for Multi-Source Fusion, ICMT, 2017
4Multiple Instance Choquet Integral for Classifier Fusion, FUZZ-IEEE, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Fuzzy integral
Simplifications - Case 2: Binary FM/FI3,4
Simple, µ(A) ∈ {0, 1}, ∀A ⊆ 2X versus [0, 1].I Efficient: few variables and just one ChI term
I Maximum number of terms is(
NN/2
), likely MUCH smaller
I Trivial to prove that∑N
i=1 (µ(Ai )− µ(Ai−1)) = 1I∑
i∈A1(0− 0)hπ(i)+ (1− 0)hπ(|A1|+1) +
∑k∈A2
(1− 1)hπ(k)
I Properties: Sugeno integral == ChI
I Understanding: best pessimistic agreementI Example: let x1=radar, x2=LWIR, x3=EMI
I Let µ(x1) = µ(x2) = µ(x3) = 0 and µ({x2, x3}) = 0, else 1I h(x1) =0.8, h(x2) = 0.5, h(x3) = 0.01, BChI is 0.5.I If radar is highest, need LWIR confirmation, disregard EMI
3Binary Fuzzy Measures and Choquet Integration for Multi-Source Fusion, ICMT, 2017
4Multiple Instance Choquet Integral for Classifier Fusion, FUZZ-IEEE, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Context: humanitarian demining
Find dangerous materials and save lives using multiple sensorsSensors: ground penetrating radar and infrared imagery
Problem: low feature level fusion
I Supervised pattern recognition/machine learning
I Observation i (e.g., image ROI), have features (xi ,k ∈ <dk )
I Kernel; φ : x→ φ(x) ∈ <D , κ(xi ,k , xj ,k) = φ(xi ,k) · φ(xj ,k)
I Kernel matrix (n objects); Kk = [Kij = κ(xi ,k , xj ,k)]n×n
I Mercer kept all the good secrets ...
Solution: Multiple kernel learning (MKL)
I Searching for f (K1, ...,KM) (building blocks)
I Fixed rule, heuristics or optimization
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU
Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Context: humanitarian demining
Find dangerous materials and save lives using multiple sensors
Sensors: ground penetrating radar and infrared imagery
Problem: low feature level fusion
I Supervised pattern recognition/machine learning
I Observation i (e.g., image ROI), have features (xi ,k ∈ <dk )
I Kernel; φ : x→ φ(x) ∈ <D , κ(xi ,k , xj ,k) = φ(xi ,k) · φ(xj ,k)
I Kernel matrix (n objects); Kk = [Kij = κ(xi ,k , xj ,k)]n×n
I Mercer kept all the good secrets ...
Solution: Multiple kernel learning (MKL)
I Searching for f (K1, ...,KM) (building blocks)
I Fixed rule, heuristics or optimization
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Context: humanitarian demining
Find dangerous materials and save lives using multiple sensorsSensors: ground penetrating radar and infrared imagery
Problem: low feature level fusion
I Supervised pattern recognition/machine learning
I Observation i (e.g., image ROI), have features (xi ,k ∈ <dk )
I Kernel; φ : x→ φ(x) ∈ <D , κ(xi ,k , xj ,k) = φ(xi ,k) · φ(xj ,k)
I Kernel matrix (n objects); Kk = [Kij = κ(xi ,k , xj ,k)]n×n
I Mercer kept all the good secrets ...
Solution: Multiple kernel learning (MKL)
I Searching for f (K1, ...,KM) (building blocks)
I Fixed rule, heuristics or optimization
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Context: humanitarian demining
Find dangerous materials and save lives using multiple sensorsSensors: ground penetrating radar and infrared imagery
Problem: low feature level fusion
I Supervised pattern recognition/machine learning
I Observation i (e.g., image ROI), have features (xi ,k ∈ <dk )
I Kernel; φ : x→ φ(x) ∈ <D , κ(xi ,k , xj ,k) = φ(xi ,k) · φ(xj ,k)
I Kernel matrix (n objects); Kk = [Kij = κ(xi ,k , xj ,k)]n×n
I Mercer kept all the good secrets ...
Solution: Multiple kernel learning (MKL)
I Searching for f (K1, ...,KM) (building blocks)
I Fixed rule, heuristics or optimization
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Context: humanitarian demining
Find dangerous materials and save lives using multiple sensorsSensors: ground penetrating radar and infrared imagery
Problem: low feature level fusion
I Supervised pattern recognition/machine learning
I Observation i (e.g., image ROI), have features (xi ,k ∈ <dk )
I Kernel; φ : x→ φ(x) ∈ <D , κ(xi ,k , xj ,k) = φ(xi ,k) · φ(xj ,k)
I Kernel matrix (n objects); Kk = [Kij = κ(xi ,k , xj ,k)]n×n
I Mercer kept all the good secrets ...
Solution: Multiple kernel learning (MKL)
I Searching for f (K1, ...,KM) (building blocks)
I Fixed rule, heuristics or optimization
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Context: humanitarian demining
Find dangerous materials and save lives using multiple sensorsSensors: ground penetrating radar and infrared imagery
Problem: low feature level fusion
I Supervised pattern recognition/machine learning
I Observation i (e.g., image ROI), have features (xi ,k ∈ <dk )
I Kernel; φ : x→ φ(x) ∈ <D , κ(xi ,k , xj ,k) = φ(xi ,k) · φ(xj ,k)
I Kernel matrix (n objects); Kk = [Kij = κ(xi ,k , xj ,k)]n×n
I Mercer kept all the good secrets ...
Solution: Multiple kernel learning (MKL)
I Searching for f (K1, ...,KM) (building blocks)
I Fixed rule, heuristics or optimization
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Context: humanitarian demining
Find dangerous materials and save lives using multiple sensorsSensors: ground penetrating radar and infrared imagery
Problem: low feature level fusion
I Supervised pattern recognition/machine learning
I Observation i (e.g., image ROI), have features (xi ,k ∈ <dk )
I Kernel; φ : x→ φ(x) ∈ <D
, κ(xi ,k , xj ,k) = φ(xi ,k) · φ(xj ,k)
I Kernel matrix (n objects); Kk = [Kij = κ(xi ,k , xj ,k)]n×n
I Mercer kept all the good secrets ...
Solution: Multiple kernel learning (MKL)
I Searching for f (K1, ...,KM) (building blocks)
I Fixed rule, heuristics or optimization
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Context: humanitarian demining
Find dangerous materials and save lives using multiple sensorsSensors: ground penetrating radar and infrared imagery
Problem: low feature level fusion
I Supervised pattern recognition/machine learning
I Observation i (e.g., image ROI), have features (xi ,k ∈ <dk )
I Kernel; φ : x→ φ(x) ∈ <D , κ(xi ,k , xj ,k) = φ(xi ,k) · φ(xj ,k)
I Kernel matrix (n objects); Kk = [Kij = κ(xi ,k , xj ,k)]n×n
I Mercer kept all the good secrets ...
Solution: Multiple kernel learning (MKL)
I Searching for f (K1, ...,KM) (building blocks)
I Fixed rule, heuristics or optimization
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Context: humanitarian demining
Find dangerous materials and save lives using multiple sensorsSensors: ground penetrating radar and infrared imagery
Problem: low feature level fusion
I Supervised pattern recognition/machine learning
I Observation i (e.g., image ROI), have features (xi ,k ∈ <dk )
I Kernel; φ : x→ φ(x) ∈ <D , κ(xi ,k , xj ,k) = φ(xi ,k) · φ(xj ,k)
I Kernel matrix (n objects); Kk = [Kij = κ(xi ,k , xj ,k)]n×n
I Mercer kept all the good secrets ...
Solution: Multiple kernel learning (MKL)
I Searching for f (K1, ...,KM) (building blocks)
I Fixed rule, heuristics or optimization
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Context: humanitarian demining
Find dangerous materials and save lives using multiple sensorsSensors: ground penetrating radar and infrared imagery
Problem: low feature level fusion
I Supervised pattern recognition/machine learning
I Observation i (e.g., image ROI), have features (xi ,k ∈ <dk )
I Kernel; φ : x→ φ(x) ∈ <D , κ(xi ,k , xj ,k) = φ(xi ,k) · φ(xj ,k)
I Kernel matrix (n objects); Kk = [Kij = κ(xi ,k , xj ,k)]n×n
I Mercer kept all the good secrets ...
Solution: Multiple kernel learning (MKL)
I Searching for f (K1, ...,KM) (building blocks)
I Fixed rule, heuristics or optimization
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Context: humanitarian demining
Find dangerous materials and save lives using multiple sensorsSensors: ground penetrating radar and infrared imagery
Problem: low feature level fusion
I Supervised pattern recognition/machine learning
I Observation i (e.g., image ROI), have features (xi ,k ∈ <dk )
I Kernel; φ : x→ φ(x) ∈ <D , κ(xi ,k , xj ,k) = φ(xi ,k) · φ(xj ,k)
I Kernel matrix (n objects); Kk = [Kij = κ(xi ,k , xj ,k)]n×n
I Mercer kept all the good secrets ...
Solution: Multiple kernel learning (MKL)
I Searching for f (K1, ...,KM) (building blocks)
I Fixed rule, heuristics or optimization
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Context: humanitarian demining
Find dangerous materials and save lives using multiple sensorsSensors: ground penetrating radar and infrared imagery
Problem: low feature level fusion
I Supervised pattern recognition/machine learning
I Observation i (e.g., image ROI), have features (xi ,k ∈ <dk )
I Kernel; φ : x→ φ(x) ∈ <D , κ(xi ,k , xj ,k) = φ(xi ,k) · φ(xj ,k)
I Kernel matrix (n objects); Kk = [Kij = κ(xi ,k , xj ,k)]n×n
I Mercer kept all the good secrets ...
Solution: Multiple kernel learning (MKL)
I Searching for f (K1, ...,KM) (building blocks)
I Fixed rule, heuristics or optimization
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Context: humanitarian demining
Find dangerous materials and save lives using multiple sensorsSensors: ground penetrating radar and infrared imagery
Problem: low feature level fusion
I Supervised pattern recognition/machine learning
I Observation i (e.g., image ROI), have features (xi ,k ∈ <dk )
I Kernel; φ : x→ φ(x) ∈ <D , κ(xi ,k , xj ,k) = φ(xi ,k) · φ(xj ,k)
I Kernel matrix (n objects); Kk = [Kij = κ(xi ,k , xj ,k)]n×n
I Mercer kept all the good secrets ...
Solution: Multiple kernel learning (MKL)
I Searching for f (K1, ...,KM) (building blocks)
I Fixed rule, heuristics or optimization
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Example: fusion of learned iECO features on IR
Candidate Chip
Population 1 (HOG)
C1
C5
iECO
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Example: fusion of learned iECO features on IR
Candidate Chip
Population 1 (HOG)
C1
C5
iECO
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Example: fusion of learned iECO features on IR
Candidate Chip
Population 1 (HOG)
C1
C5
Population 2 (EHD)
C6
C10
iECO
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Example: fusion of learned iECO features on IR
Candidate Chip
Population 1 (HOG)
C1
C5
Population 2 (EHD)
C6
C10
Population 3 (SD)
C11
C15
iECO
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Different MKL approaches5
I Not a comprehensive listI Simple linear convex sum (LCS)
I Xu et al.: MKL by group lasso (MKLGL)I Varma and Babu: generalized MKL (Gaussians)I Cortes et al.: polynomial kernelsI Us: FI and genetic algorithm (FIGA)I Us: GA MKL p-norm (GAMKLp)
I Fuzzy integral (nonlinear)I Us: Decision level FI MKL p-norm (DeFIMKLp)I Us: Decision level least squares MKL (DeLSMKL)
5Efficient Multiple Kernel Classification using Feature and Decision Level Fusion, TFS, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Different MKL approaches5
I Not a comprehensive listI Simple linear convex sum (LCS)
I Xu et al.: MKL by group lasso (MKLGL)I Varma and Babu: generalized MKL (Gaussians)I Cortes et al.: polynomial kernelsI Us: FI and genetic algorithm (FIGA)I Us: GA MKL p-norm (GAMKLp)
I Fuzzy integral (nonlinear)I Us: Decision level FI MKL p-norm (DeFIMKLp)I Us: Decision level least squares MKL (DeLSMKL)
5Efficient Multiple Kernel Classification using Feature and Decision Level Fusion, TFS, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Different MKL approaches5
I Not a comprehensive listI Simple linear convex sum (LCS)
I Xu et al.: MKL by group lasso (MKLGL)I Varma and Babu: generalized MKL (Gaussians)I Cortes et al.: polynomial kernelsI Us: FI and genetic algorithm (FIGA)I Us: GA MKL p-norm (GAMKLp)
I Fuzzy integral (nonlinear)
I Us: Decision level FI MKL p-norm (DeFIMKLp)I Us: Decision level least squares MKL (DeLSMKL)
5Efficient Multiple Kernel Classification using Feature and Decision Level Fusion, TFS, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Different MKL approaches5
I Not a comprehensive listI Simple linear convex sum (LCS)
I Xu et al.: MKL by group lasso (MKLGL)I Varma and Babu: generalized MKL (Gaussians)I Cortes et al.: polynomial kernelsI Us: FI and genetic algorithm (FIGA)I Us: GA MKL p-norm (GAMKLp)
I Fuzzy integral (nonlinear)I Us: Decision level FI MKL p-norm (DeFIMKLp)I Us: Decision level least squares MKL (DeLSMKL)
5Efficient Multiple Kernel Classification using Feature and Decision Level Fusion, TFS, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
DeFIMKL algorithm6
I fk(xi ) is decision on xi by kth classifier
I ηk(x) =∑n
i=1 αikyiκk(xi , x)− bkI fk(x) = ηk (x)√
1+η2k (x)
I Fuzzy integral isI fµ(xi ) =
∑mk=1 fπ(k)(xi ) [µ(Ak)− µ(Ak−1)]
I Sum of squared error (SSE)
I E 2 =∑n
i=1 (fµ(xi )− yi )2
I E 2 =∑n
i=1
(HT
xi u− yi)2
I E 2 =∑n
i=1
(uTHxiH
Txi u− 2yiH
Txi u + y2
i
)I E 2 = uTDu + fTu +
∑ni=1 y
2i
I D =∑n
i=1 HxiHTxi and f = −
∑ni=1 2yiHxi
I QP subject to monotonicity constraintsI minu 0.5uT D̂u + fTu + λ‖u‖p,Cu ≤ 0, (0, 1)T ≤ u ≤ 1
6Efficient Multiple Kernel Classification using Feature and Decision Level Fusion, TFS, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
DeFIMKL algorithm6
I fk(xi ) is decision on xi by kth classifierI ηk(x) =
∑ni=1 αikyiκk(xi , x)− bk
I fk(x) = ηk (x)√1+η2
k (x)
I Fuzzy integral isI fµ(xi ) =
∑mk=1 fπ(k)(xi ) [µ(Ak)− µ(Ak−1)]
I Sum of squared error (SSE)
I E 2 =∑n
i=1 (fµ(xi )− yi )2
I E 2 =∑n
i=1
(HT
xi u− yi)2
I E 2 =∑n
i=1
(uTHxiH
Txi u− 2yiH
Txi u + y2
i
)I E 2 = uTDu + fTu +
∑ni=1 y
2i
I D =∑n
i=1 HxiHTxi and f = −
∑ni=1 2yiHxi
I QP subject to monotonicity constraintsI minu 0.5uT D̂u + fTu + λ‖u‖p,Cu ≤ 0, (0, 1)T ≤ u ≤ 1
6Efficient Multiple Kernel Classification using Feature and Decision Level Fusion, TFS, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
DeFIMKL algorithm6
I fk(xi ) is decision on xi by kth classifierI ηk(x) =
∑ni=1 αikyiκk(xi , x)− bk
I fk(x) = ηk (x)√1+η2
k (x)
I Fuzzy integral isI fµ(xi ) =
∑mk=1 fπ(k)(xi ) [µ(Ak)− µ(Ak−1)]
I Sum of squared error (SSE)
I E 2 =∑n
i=1 (fµ(xi )− yi )2
I E 2 =∑n
i=1
(HT
xi u− yi)2
I E 2 =∑n
i=1
(uTHxiH
Txi u− 2yiH
Txi u + y2
i
)I E 2 = uTDu + fTu +
∑ni=1 y
2i
I D =∑n
i=1 HxiHTxi and f = −
∑ni=1 2yiHxi
I QP subject to monotonicity constraintsI minu 0.5uT D̂u + fTu + λ‖u‖p,Cu ≤ 0, (0, 1)T ≤ u ≤ 1
6Efficient Multiple Kernel Classification using Feature and Decision Level Fusion, TFS, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
DeFIMKL algorithm6
I fk(xi ) is decision on xi by kth classifierI ηk(x) =
∑ni=1 αikyiκk(xi , x)− bk
I fk(x) = ηk (x)√1+η2
k (x)
I Fuzzy integral isI fµ(xi ) =
∑mk=1 fπ(k)(xi ) [µ(Ak)− µ(Ak−1)]
I Sum of squared error (SSE)
I E 2 =∑n
i=1 (fµ(xi )− yi )2
I E 2 =∑n
i=1
(HT
xi u− yi)2
I E 2 =∑n
i=1
(uTHxiH
Txi u− 2yiH
Txi u + y2
i
)I E 2 = uTDu + fTu +
∑ni=1 y
2i
I D =∑n
i=1 HxiHTxi and f = −
∑ni=1 2yiHxi
I QP subject to monotonicity constraintsI minu 0.5uT D̂u + fTu + λ‖u‖p,Cu ≤ 0, (0, 1)T ≤ u ≤ 1
6Efficient Multiple Kernel Classification using Feature and Decision Level Fusion, TFS, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
DeFIMKL algorithm6
I fk(xi ) is decision on xi by kth classifierI ηk(x) =
∑ni=1 αikyiκk(xi , x)− bk
I fk(x) = ηk (x)√1+η2
k (x)
I Fuzzy integral isI fµ(xi ) =
∑mk=1 fπ(k)(xi ) [µ(Ak)− µ(Ak−1)]
I Sum of squared error (SSE)
I E 2 =∑n
i=1 (fµ(xi )− yi )2
I E 2 =∑n
i=1
(HT
xi u− yi)2
I E 2 =∑n
i=1
(uTHxiH
Txi u− 2yiH
Txi u + y2
i
)I E 2 = uTDu + fTu +
∑ni=1 y
2i
I D =∑n
i=1 HxiHTxi and f = −
∑ni=1 2yiHxi
I QP subject to monotonicity constraintsI minu 0.5uT D̂u + fTu + λ‖u‖p,Cu ≤ 0, (0, 1)T ≤ u ≤ 1
6Efficient Multiple Kernel Classification using Feature and Decision Level Fusion, TFS, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
DeFIMKL algorithm6
I fk(xi ) is decision on xi by kth classifierI ηk(x) =
∑ni=1 αikyiκk(xi , x)− bk
I fk(x) = ηk (x)√1+η2
k (x)
I Fuzzy integral isI fµ(xi ) =
∑mk=1 fπ(k)(xi ) [µ(Ak)− µ(Ak−1)]
I Sum of squared error (SSE)
I E 2 =∑n
i=1 (fµ(xi )− yi )2
I E 2 =∑n
i=1
(HT
xi u− yi)2
I E 2 =∑n
i=1
(uTHxiH
Txi u− 2yiH
Txi u + y2
i
)I E 2 = uTDu + fTu +
∑ni=1 y
2i
I D =∑n
i=1 HxiHTxi and f = −
∑ni=1 2yiHxi
I QP subject to monotonicity constraintsI minu 0.5uT D̂u + fTu + λ‖u‖p,Cu ≤ 0, (0, 1)T ≤ u ≤ 1
6Efficient Multiple Kernel Classification using Feature and Decision Level Fusion, TFS, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
DeFIMKL algorithm6
I fk(xi ) is decision on xi by kth classifierI ηk(x) =
∑ni=1 αikyiκk(xi , x)− bk
I fk(x) = ηk (x)√1+η2
k (x)
I Fuzzy integral isI fµ(xi ) =
∑mk=1 fπ(k)(xi ) [µ(Ak)− µ(Ak−1)]
I Sum of squared error (SSE)
I E 2 =∑n
i=1 (fµ(xi )− yi )2
I E 2 =∑n
i=1
(HT
xi u− yi)2
I E 2 =∑n
i=1
(uTHxiH
Txi u− 2yiH
Txi u + y2
i
)I E 2 = uTDu + fTu +
∑ni=1 y
2i
I D =∑n
i=1 HxiHTxi and f = −
∑ni=1 2yiHxi
I QP subject to monotonicity constraintsI minu 0.5uT D̂u + fTu + λ‖u‖p,Cu ≤ 0, (0, 1)T ≤ u ≤ 1
6Efficient Multiple Kernel Classification using Feature and Decision Level Fusion, TFS, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
DeFIMKL algorithm6
I fk(xi ) is decision on xi by kth classifierI ηk(x) =
∑ni=1 αikyiκk(xi , x)− bk
I fk(x) = ηk (x)√1+η2
k (x)
I Fuzzy integral isI fµ(xi ) =
∑mk=1 fπ(k)(xi ) [µ(Ak)− µ(Ak−1)]
I Sum of squared error (SSE)
I E 2 =∑n
i=1 (fµ(xi )− yi )2
I E 2 =∑n
i=1
(HT
xi u− yi)2
I E 2 =∑n
i=1
(uTHxiH
Txi u− 2yiH
Txi u + y2
i
)
I E 2 = uTDu + fTu +∑n
i=1 y2i
I D =∑n
i=1 HxiHTxi and f = −
∑ni=1 2yiHxi
I QP subject to monotonicity constraintsI minu 0.5uT D̂u + fTu + λ‖u‖p,Cu ≤ 0, (0, 1)T ≤ u ≤ 1
6Efficient Multiple Kernel Classification using Feature and Decision Level Fusion, TFS, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
DeFIMKL algorithm6
I fk(xi ) is decision on xi by kth classifierI ηk(x) =
∑ni=1 αikyiκk(xi , x)− bk
I fk(x) = ηk (x)√1+η2
k (x)
I Fuzzy integral isI fµ(xi ) =
∑mk=1 fπ(k)(xi ) [µ(Ak)− µ(Ak−1)]
I Sum of squared error (SSE)
I E 2 =∑n
i=1 (fµ(xi )− yi )2
I E 2 =∑n
i=1
(HT
xi u− yi)2
I E 2 =∑n
i=1
(uTHxiH
Txi u− 2yiH
Txi u + y2
i
)I E 2 = uTDu + fTu +
∑ni=1 y
2i
I D =∑n
i=1 HxiHTxi and f = −
∑ni=1 2yiHxi
I QP subject to monotonicity constraintsI minu 0.5uT D̂u + fTu + λ‖u‖p,Cu ≤ 0, (0, 1)T ≤ u ≤ 1
6Efficient Multiple Kernel Classification using Feature and Decision Level Fusion, TFS, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
DeFIMKL algorithm6
I fk(xi ) is decision on xi by kth classifierI ηk(x) =
∑ni=1 αikyiκk(xi , x)− bk
I fk(x) = ηk (x)√1+η2
k (x)
I Fuzzy integral isI fµ(xi ) =
∑mk=1 fπ(k)(xi ) [µ(Ak)− µ(Ak−1)]
I Sum of squared error (SSE)
I E 2 =∑n
i=1 (fµ(xi )− yi )2
I E 2 =∑n
i=1
(HT
xi u− yi)2
I E 2 =∑n
i=1
(uTHxiH
Txi u− 2yiH
Txi u + y2
i
)I E 2 = uTDu + fTu +
∑ni=1 y
2i
I D =∑n
i=1 HxiHTxi and f = −
∑ni=1 2yiHxi
I QP subject to monotonicity constraints
I minu 0.5uT D̂u + fTu + λ‖u‖p,Cu ≤ 0, (0, 1)T ≤ u ≤ 1
6Efficient Multiple Kernel Classification using Feature and Decision Level Fusion, TFS, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
DeFIMKL algorithm6
I fk(xi ) is decision on xi by kth classifierI ηk(x) =
∑ni=1 αikyiκk(xi , x)− bk
I fk(x) = ηk (x)√1+η2
k (x)
I Fuzzy integral isI fµ(xi ) =
∑mk=1 fπ(k)(xi ) [µ(Ak)− µ(Ak−1)]
I Sum of squared error (SSE)
I E 2 =∑n
i=1 (fµ(xi )− yi )2
I E 2 =∑n
i=1
(HT
xi u− yi)2
I E 2 =∑n
i=1
(uTHxiH
Txi u− 2yiH
Txi u + y2
i
)I E 2 = uTDu + fTu +
∑ni=1 y
2i
I D =∑n
i=1 HxiHTxi and f = −
∑ni=1 2yiHxi
I QP subject to monotonicity constraintsI minu 0.5uT D̂u + fTu + λ‖u‖p,Cu ≤ 0, (0, 1)T ≤ u ≤ 1
6Efficient Multiple Kernel Classification using Feature and Decision Level Fusion, TFS, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU
Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Big Data: Nystrom approximation and linearization7
I MKL can be difficult-to-impossible to apply to large dataI Full MKL for m matrices is mn2
I Gram matrix, K ∈ <n×n, approximated byI K̃ = KzK
†zzK
Tz
I z are indices of |z | sampled columns of KI K †zz is Moore-Penrose pseudoinverse of Kzz
I Now, aggregate m size nz matrices, so mnzI K̃z =
∑mk=1 (wkKk)z is positive semi-definite (PSD)
I Can linearize by eigendecomposition of fused K̃zz
I K̃†zz = UzΛ−1z UT
z
I Linearized model (X̃ ) becomes X̃ = K̃zUzΛ− 1
2z
I Put into a linear SVM vs. kernel SVM (faster!)
7Efficient Multiple Kernel Classification using Feature and Decision Level Fusion, TFS, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU
Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Big Data: Nystrom approximation and linearization7
I MKL can be difficult-to-impossible to apply to large dataI Full MKL for m matrices is mn2
I Gram matrix, K ∈ <n×n, approximated by
I K̃ = KzK†zzK
Tz
I z are indices of |z | sampled columns of KI K †zz is Moore-Penrose pseudoinverse of Kzz
I Now, aggregate m size nz matrices, so mnzI K̃z =
∑mk=1 (wkKk)z is positive semi-definite (PSD)
I Can linearize by eigendecomposition of fused K̃zz
I K̃†zz = UzΛ−1z UT
z
I Linearized model (X̃ ) becomes X̃ = K̃zUzΛ− 1
2z
I Put into a linear SVM vs. kernel SVM (faster!)
7Efficient Multiple Kernel Classification using Feature and Decision Level Fusion, TFS, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Big Data: Nystrom approximation and linearization7
I MKL can be difficult-to-impossible to apply to large dataI Full MKL for m matrices is mn2
I Gram matrix, K ∈ <n×n, approximated byI K̃ = KzK
†zzK
Tz
I z are indices of |z | sampled columns of KI K †zz is Moore-Penrose pseudoinverse of Kzz
I Now, aggregate m size nz matrices, so mnzI K̃z =
∑mk=1 (wkKk)z is positive semi-definite (PSD)
I Can linearize by eigendecomposition of fused K̃zz
I K̃†zz = UzΛ−1z UT
z
I Linearized model (X̃ ) becomes X̃ = K̃zUzΛ− 1
2z
I Put into a linear SVM vs. kernel SVM (faster!)
7Efficient Multiple Kernel Classification using Feature and Decision Level Fusion, TFS, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Big Data: Nystrom approximation and linearization7
I MKL can be difficult-to-impossible to apply to large dataI Full MKL for m matrices is mn2
I Gram matrix, K ∈ <n×n, approximated byI K̃ = KzK
†zzK
Tz
I z are indices of |z | sampled columns of KI K †zz is Moore-Penrose pseudoinverse of Kzz
I Now, aggregate m size nz matrices, so mnzI K̃z =
∑mk=1 (wkKk)z is positive semi-definite (PSD)
I Can linearize by eigendecomposition of fused K̃zz
I K̃†zz = UzΛ−1z UT
z
I Linearized model (X̃ ) becomes X̃ = K̃zUzΛ− 1
2z
I Put into a linear SVM vs. kernel SVM (faster!)
7Efficient Multiple Kernel Classification using Feature and Decision Level Fusion, TFS, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU
Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Big Data: Nystrom approximation and linearization7
I MKL can be difficult-to-impossible to apply to large dataI Full MKL for m matrices is mn2
I Gram matrix, K ∈ <n×n, approximated byI K̃ = KzK
†zzK
Tz
I z are indices of |z | sampled columns of KI K †zz is Moore-Penrose pseudoinverse of Kzz
I Now, aggregate m size nz matrices, so mnzI K̃z =
∑mk=1 (wkKk)z is positive semi-definite (PSD)
I Can linearize by eigendecomposition of fused K̃zz
I K̃†zz = UzΛ−1z UT
z
I Linearized model (X̃ ) becomes X̃ = K̃zUzΛ− 1
2z
I Put into a linear SVM vs. kernel SVM (faster!)
7Efficient Multiple Kernel Classification using Feature and Decision Level Fusion, TFS, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Big Data: Nystrom approximation and linearization7
I MKL can be difficult-to-impossible to apply to large dataI Full MKL for m matrices is mn2
I Gram matrix, K ∈ <n×n, approximated byI K̃ = KzK
†zzK
Tz
I z are indices of |z | sampled columns of KI K †zz is Moore-Penrose pseudoinverse of Kzz
I Now, aggregate m size nz matrices, so mnzI K̃z =
∑mk=1 (wkKk)z is positive semi-definite (PSD)
I Can linearize by eigendecomposition of fused K̃zz
I K̃†zz = UzΛ−1z UT
z
I Linearized model (X̃ ) becomes X̃ = K̃zUzΛ− 1
2z
I Put into a linear SVM vs. kernel SVM (faster!)
7Efficient Multiple Kernel Classification using Feature and Decision Level Fusion, TFS, 2016
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Complexity: information theoretic indices8
I 2N -2 “free parameters”; exclude µ(∅) = 0 and µ(X ) = 1
I Numerous questionsI How important is each individual input?I How are tuples of the individuals interacting?
I Data-driven learning: E (D,Θ) = f1 (f2(D,Θ), f3(Θ))I E is error, D is data, Θ are our parametersI What should f1, f2 and f3 be?I f2 = SSE w.r.t. ChI, f3 = µ index, and f1 = a + λb
8Measure of the Shapley Index for Learning Lower Complexity Fuzzy Integrals, Granular Computing, 2017
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Complexity: information theoretic indices8
I 2N -2 “free parameters”; exclude µ(∅) = 0 and µ(X ) = 1I Numerous questions
I How important is each individual input?I How are tuples of the individuals interacting?
I Data-driven learning: E (D,Θ) = f1 (f2(D,Θ), f3(Θ))I E is error, D is data, Θ are our parametersI What should f1, f2 and f3 be?I f2 = SSE w.r.t. ChI, f3 = µ index, and f1 = a + λb
8Measure of the Shapley Index for Learning Lower Complexity Fuzzy Integrals, Granular Computing, 2017
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Complexity: information theoretic indices8
I 2N -2 “free parameters”; exclude µ(∅) = 0 and µ(X ) = 1I Numerous questions
I How important is each individual input?
I How are tuples of the individuals interacting?
I Data-driven learning: E (D,Θ) = f1 (f2(D,Θ), f3(Θ))I E is error, D is data, Θ are our parametersI What should f1, f2 and f3 be?I f2 = SSE w.r.t. ChI, f3 = µ index, and f1 = a + λb
8Measure of the Shapley Index for Learning Lower Complexity Fuzzy Integrals, Granular Computing, 2017
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Complexity: information theoretic indices8
I 2N -2 “free parameters”; exclude µ(∅) = 0 and µ(X ) = 1I Numerous questions
I How important is each individual input?I How are tuples of the individuals interacting?
I Data-driven learning: E (D,Θ) = f1 (f2(D,Θ), f3(Θ))I E is error, D is data, Θ are our parametersI What should f1, f2 and f3 be?I f2 = SSE w.r.t. ChI, f3 = µ index, and f1 = a + λb
8Measure of the Shapley Index for Learning Lower Complexity Fuzzy Integrals, Granular Computing, 2017
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Complexity: information theoretic indices8
I 2N -2 “free parameters”; exclude µ(∅) = 0 and µ(X ) = 1I Numerous questions
I How important is each individual input?I How are tuples of the individuals interacting?
I Data-driven learning: E (D,Θ) = f1 (f2(D,Θ), f3(Θ))I E is error, D is data, Θ are our parameters
I What should f1, f2 and f3 be?I f2 = SSE w.r.t. ChI, f3 = µ index, and f1 = a + λb
8Measure of the Shapley Index for Learning Lower Complexity Fuzzy Integrals, Granular Computing, 2017
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Complexity: information theoretic indices8
I 2N -2 “free parameters”; exclude µ(∅) = 0 and µ(X ) = 1I Numerous questions
I How important is each individual input?I How are tuples of the individuals interacting?
I Data-driven learning: E (D,Θ) = f1 (f2(D,Θ), f3(Θ))I E is error, D is data, Θ are our parametersI What should f1, f2 and f3 be?
I f2 = SSE w.r.t. ChI, f3 = µ index, and f1 = a + λb
8Measure of the Shapley Index for Learning Lower Complexity Fuzzy Integrals, Granular Computing, 2017
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Complexity: information theoretic indices8
I 2N -2 “free parameters”; exclude µ(∅) = 0 and µ(X ) = 1I Numerous questions
I How important is each individual input?I How are tuples of the individuals interacting?
I Data-driven learning: E (D,Θ) = f1 (f2(D,Θ), f3(Θ))I E is error, D is data, Θ are our parametersI What should f1, f2 and f3 be?I f2 = SSE w.r.t. ChI
, f3 = µ index, and f1 = a + λb
8Measure of the Shapley Index for Learning Lower Complexity Fuzzy Integrals, Granular Computing, 2017
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Complexity: information theoretic indices8
I 2N -2 “free parameters”; exclude µ(∅) = 0 and µ(X ) = 1I Numerous questions
I How important is each individual input?I How are tuples of the individuals interacting?
I Data-driven learning: E (D,Θ) = f1 (f2(D,Θ), f3(Θ))I E is error, D is data, Θ are our parametersI What should f1, f2 and f3 be?I f2 = SSE w.r.t. ChI, f3 = µ index
, and f1 = a + λb
8Measure of the Shapley Index for Learning Lower Complexity Fuzzy Integrals, Granular Computing, 2017
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU
Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Complexity: information theoretic indices8
I 2N -2 “free parameters”; exclude µ(∅) = 0 and µ(X ) = 1I Numerous questions
I How important is each individual input?I How are tuples of the individuals interacting?
I Data-driven learning: E (D,Θ) = f1 (f2(D,Θ), f3(Θ))I E is error, D is data, Θ are our parametersI What should f1, f2 and f3 be?I f2 = SSE w.r.t. ChI, f3 = µ index, and f1 = a + λb
8Measure of the Shapley Index for Learning Lower Complexity Fuzzy Integrals, Granular Computing, 2017
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Complexity: information theoretic indices9,10,11
I Labreuche’s entropy; −∑N
i=1
(∑K⊆X\{i} ζX,1 (K)
∣∣∣Ai − 1N
∣∣∣), where Ai = µ(K ∪ {i})− µ(K)
I Marichal’s entropy; −∑N
i=1
(∑K⊆X\{i} ζX,1 (K) Ai ln (Ai )
), where Ai = µ(K ∪ {i})− µ(K)
I Kojadinovic’s variance; 1N
∑Ni=1
(∑K⊆X\{i} ζX,1(K)
(Ai − 1
N
)2)
, where Ai = µ(K ∪ {i})− µ(K)
I Shapley index: Φµ(i) =∑
K⊆X\{i} ζX,1(K) (µ(K ∪ {i})− µ(K))
I Interaction index; Iµ(i, j) =∑
K⊆X\{i,j} ζX,2(K)(µ(K ∪{i, j})−µ(K ∪{i})−µ(K ∪{j}) +µ(K))
I Shannon entropy of Shapley values; −∑N
i=1 Φµ(i)ln(Φµ(i))
I k-additive index;∑
A⊆X f (|A|)|M(A)|
I `0-norm of Shapley vector;∥∥Φµ
∥∥0
=∣∣{i : Φµ(i) 6= 0
}∣∣, Φµ =(
Φµ(1), ...,Φµ(N))t
I `1-norm of Shapley vector;∥∥Φµ
∥∥1
=∑N
i=1
∣∣Φµ(i)∣∣ =
∑Ni=1 Φµ(i) = 1, Φµ =
(Φµ(1), ...,Φµ(N)
)tI Gini-Simpson of Shapley values; 1−
∑Ni=1 Φµ(i)2
9u: Lexicographic encoding of µ; ut = (µ1, ..., µ12, ...µ12...N )t
10Measure of the Shapley Index for Learning Lower Complexity Fuzzy Integrals, Granular Computing, 2017
11ζX,1(K) =
(|X|−|K|−1)!|K|!|X|! and ζX,2(K) =
(|X|−|K|−2)!|K|!(|X|−1)!
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Summary of results
I iECO features on infrared imageryI 173 buried targets; various days, depths, types, etc.
I Compared fixed, heuristic and optimization MKLI Compared to state-of-the-art in ML/CV (important!)I DeFIMKLp led to rise in PDR/lower FAR (124%, NAUC)I Specifically, generalized very well (regularization)
I Ground penetrating radarI Energy (no phase) based spatial featuresI Performance gain for DeFIMKL (138%) and GAMKLp (147%)
I EfficiencyI We were able to keep only [2%, 10%] of kernel data, relative to
5% drop in performance
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Summary of results
I iECO features on infrared imageryI 173 buried targets; various days, depths, types, etc.I Compared fixed, heuristic and optimization MKL
I Compared to state-of-the-art in ML/CV (important!)I DeFIMKLp led to rise in PDR/lower FAR (124%, NAUC)I Specifically, generalized very well (regularization)
I Ground penetrating radarI Energy (no phase) based spatial featuresI Performance gain for DeFIMKL (138%) and GAMKLp (147%)
I EfficiencyI We were able to keep only [2%, 10%] of kernel data, relative to
5% drop in performance
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Summary of results
I iECO features on infrared imageryI 173 buried targets; various days, depths, types, etc.I Compared fixed, heuristic and optimization MKLI Compared to state-of-the-art in ML/CV (important!)
I DeFIMKLp led to rise in PDR/lower FAR (124%, NAUC)I Specifically, generalized very well (regularization)
I Ground penetrating radarI Energy (no phase) based spatial featuresI Performance gain for DeFIMKL (138%) and GAMKLp (147%)
I EfficiencyI We were able to keep only [2%, 10%] of kernel data, relative to
5% drop in performance
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Summary of results
I iECO features on infrared imageryI 173 buried targets; various days, depths, types, etc.I Compared fixed, heuristic and optimization MKLI Compared to state-of-the-art in ML/CV (important!)I DeFIMKLp led to rise in PDR/lower FAR (124%, NAUC)
I Specifically, generalized very well (regularization)
I Ground penetrating radarI Energy (no phase) based spatial featuresI Performance gain for DeFIMKL (138%) and GAMKLp (147%)
I EfficiencyI We were able to keep only [2%, 10%] of kernel data, relative to
5% drop in performance
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU
Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Summary of results
I iECO features on infrared imageryI 173 buried targets; various days, depths, types, etc.I Compared fixed, heuristic and optimization MKLI Compared to state-of-the-art in ML/CV (important!)I DeFIMKLp led to rise in PDR/lower FAR (124%, NAUC)I Specifically, generalized very well (regularization)
I Ground penetrating radarI Energy (no phase) based spatial featuresI Performance gain for DeFIMKL (138%) and GAMKLp (147%)
I EfficiencyI We were able to keep only [2%, 10%] of kernel data, relative to
5% drop in performance
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Summary of results
I iECO features on infrared imageryI 173 buried targets; various days, depths, types, etc.I Compared fixed, heuristic and optimization MKLI Compared to state-of-the-art in ML/CV (important!)I DeFIMKLp led to rise in PDR/lower FAR (124%, NAUC)I Specifically, generalized very well (regularization)
I Ground penetrating radarI Energy (no phase) based spatial features
I Performance gain for DeFIMKL (138%) and GAMKLp (147%)
I EfficiencyI We were able to keep only [2%, 10%] of kernel data, relative to
5% drop in performance
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Summary of results
I iECO features on infrared imageryI 173 buried targets; various days, depths, types, etc.I Compared fixed, heuristic and optimization MKLI Compared to state-of-the-art in ML/CV (important!)I DeFIMKLp led to rise in PDR/lower FAR (124%, NAUC)I Specifically, generalized very well (regularization)
I Ground penetrating radarI Energy (no phase) based spatial featuresI Performance gain for DeFIMKL (138%) and GAMKLp (147%)
I EfficiencyI We were able to keep only [2%, 10%] of kernel data, relative to
5% drop in performance
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Summary of results
I iECO features on infrared imageryI 173 buried targets; various days, depths, types, etc.I Compared fixed, heuristic and optimization MKLI Compared to state-of-the-art in ML/CV (important!)I DeFIMKLp led to rise in PDR/lower FAR (124%, NAUC)I Specifically, generalized very well (regularization)
I Ground penetrating radarI Energy (no phase) based spatial featuresI Performance gain for DeFIMKL (138%) and GAMKLp (147%)
I EfficiencyI We were able to keep only [2%, 10%] of kernel data, relative to
5% drop in performance
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Unsolved challenges
I Computational and storage efficiencyI Millions of training samples and many base kernels
I Non-linear SISO/FIFO MKLI n! possibilities, each a feature space
I Kij = 〈φσ(xi ), φσ(xj)〉 =∑m
k=1 σk (Kk)ij =√σ1φ1i
...√σmφ
mi
t √σ1φ1j
...√σmφ
mj
I Heterogeneous kernels and normalization
I What E (D,Θ) ...
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Unsolved challenges
I Computational and storage efficiencyI Millions of training samples and many base kernels
I Non-linear SISO/FIFO MKLI n! possibilities, each a feature space
I Kij = 〈φσ(xi ), φσ(xj)〉 =∑m
k=1 σk (Kk)ij =√σ1φ1i
...√σmφ
mi
t √σ1φ1j
...√σmφ
mj
I Heterogeneous kernels and normalization
I What E (D,Θ) ...
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Unsolved challenges
I Computational and storage efficiencyI Millions of training samples and many base kernels
I Non-linear SISO/FIFO MKLI n! possibilities, each a feature space
I Kij = 〈φσ(xi ), φσ(xj)〉 =∑m
k=1 σk (Kk)ij =√σ1φ1i
...√σmφ
mi
t √σ1φ1j
...√σmφ
mj
I Heterogeneous kernels and normalization
I What E (D,Θ) ...
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 1: feature fusion
Unsolved challenges
I Computational and storage efficiencyI Millions of training samples and many base kernels
I Non-linear SISO/FIFO MKLI n! possibilities, each a feature space
I Kij = 〈φσ(xi ), φσ(xj)〉 =∑m
k=1 σk (Kk)ij =√σ1φ1i
...√σmφ
mi
t √σ1φ1j
...√σmφ
mj
I Heterogeneous kernels and normalization
I What E (D,Θ) ...
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Context: humanitarian demining
Find dangerous materials and save lives using multiple sensorsSensors: ground penetrating radar and electromagnetic induction
Problem: one size does NOT fit all
I Typically, learn a single Cµ(h)
I Instead, f (Cµ1(h1), ...,Cµk (hk)); where hi is subset of X
I Different sensors/features/algorithms/etc. require differentaggregation philosophies within and across inputs
Solution: genetic programming-based ChI (GPChI)
I Composition and arithmetic combination of ChIs
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU
Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Context: humanitarian demining
Find dangerous materials and save lives using multiple sensors
Sensors: ground penetrating radar and electromagnetic induction
Problem: one size does NOT fit all
I Typically, learn a single Cµ(h)
I Instead, f (Cµ1(h1), ...,Cµk (hk)); where hi is subset of X
I Different sensors/features/algorithms/etc. require differentaggregation philosophies within and across inputs
Solution: genetic programming-based ChI (GPChI)
I Composition and arithmetic combination of ChIs
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Context: humanitarian demining
Find dangerous materials and save lives using multiple sensorsSensors: ground penetrating radar and electromagnetic induction
Problem: one size does NOT fit all
I Typically, learn a single Cµ(h)
I Instead, f (Cµ1(h1), ...,Cµk (hk)); where hi is subset of X
I Different sensors/features/algorithms/etc. require differentaggregation philosophies within and across inputs
Solution: genetic programming-based ChI (GPChI)
I Composition and arithmetic combination of ChIs
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Context: humanitarian demining
Find dangerous materials and save lives using multiple sensorsSensors: ground penetrating radar and electromagnetic induction
Problem: one size does NOT fit all
I Typically, learn a single Cµ(h)
I Instead, f (Cµ1(h1), ...,Cµk (hk)); where hi is subset of X
I Different sensors/features/algorithms/etc. require differentaggregation philosophies within and across inputs
Solution: genetic programming-based ChI (GPChI)
I Composition and arithmetic combination of ChIs
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Context: humanitarian demining
Find dangerous materials and save lives using multiple sensorsSensors: ground penetrating radar and electromagnetic induction
Problem: one size does NOT fit all
I Typically, learn a single Cµ(h)
I Instead, f (Cµ1(h1), ...,Cµk (hk)); where hi is subset of X
I Different sensors/features/algorithms/etc. require differentaggregation philosophies within and across inputs
Solution: genetic programming-based ChI (GPChI)
I Composition and arithmetic combination of ChIs
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Context: humanitarian demining
Find dangerous materials and save lives using multiple sensorsSensors: ground penetrating radar and electromagnetic induction
Problem: one size does NOT fit all
I Typically, learn a single Cµ(h)
I Instead, f (Cµ1(h1), ...,Cµk (hk)); where hi is subset of X
I Different sensors/features/algorithms/etc. require differentaggregation philosophies within and across inputs
Solution: genetic programming-based ChI (GPChI)
I Composition and arithmetic combination of ChIs
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Context: humanitarian demining
Find dangerous materials and save lives using multiple sensorsSensors: ground penetrating radar and electromagnetic induction
Problem: one size does NOT fit all
I Typically, learn a single Cµ(h)
I Instead, f (Cµ1(h1), ...,Cµk (hk)); where hi is subset of X
I Different sensors/features/algorithms/etc. require differentaggregation philosophies within and across inputs
Solution: genetic programming-based ChI (GPChI)
I Composition and arithmetic combination of ChIs
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Context: humanitarian demining
Find dangerous materials and save lives using multiple sensorsSensors: ground penetrating radar and electromagnetic induction
Problem: one size does NOT fit all
I Typically, learn a single Cµ(h)
I Instead, f (Cµ1(h1), ...,Cµk (hk)); where hi is subset of X
I Different sensors/features/algorithms/etc. require differentaggregation philosophies within and across inputs
Solution: genetic programming-based ChI (GPChI)
I Composition and arithmetic combination of ChIs
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Context: humanitarian demining
Find dangerous materials and save lives using multiple sensorsSensors: ground penetrating radar and electromagnetic induction
Problem: one size does NOT fit all
I Typically, learn a single Cµ(h)
I Instead, f (Cµ1(h1), ...,Cµk (hk)); where hi is subset of X
I Different sensors/features/algorithms/etc. require differentaggregation philosophies within and across inputs
Solution: genetic programming-based ChI (GPChI)
I Composition and arithmetic combination of ChIs
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Multi-sensor fusion12,13,14,15,16
12Genetic Programming Based Choquet Integral for Multi-Source Fusion, FUZZ-IEEE, 2017
13Fusion of Choquet integrals for explosive hazard detection in EMI and GPR for handheld platforms, 2017
14Background adaptive division filtering for hand-held ground penetrating radar, 2016
15Curvelet filter-based prescreener for explosive hazard detection in hand-held ground penetrating radar, 2016
16Binary Fuzzy Measures and Choquet Integration for Multi-Source Fusion, 2017
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Ground penetrating radar
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Ground penetrating radar
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Ground penetrating radar
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Ground penetrating radar
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Ground penetrating radar
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Ground penetrating radar
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Electromagnetic induction
Receiver CoilTransmitter Coil
ObjectMagnetic Field
Induced Magnetic Field
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Electromagnetic induction
Receiver CoilTransmitter Coil
Magnetic Field
Induced Magnetic Field
Object
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Fusion of fusions of CV information
I Multiple CV algorithms on GPR and EMI
I GP for candidates, GA for {µ1, ..., µk}I Proofs
I ChI w.r.t. the LCS of FMs is equal tothe LCS of ChIs
I LCS of FMs is a FMI ChI of ChIs is not guaranteed to be a ChII GpChI bounded conditionsI GpChI is not guaranteed to be a ChI
I InterestingI Can write out GPChI, but understand ...I Not the machines problem ...
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Fusion of fusions of CV information
I Multiple CV algorithms on GPR and EMI
I GP for candidates, GA for {µ1, ..., µk}
I ProofsI ChI w.r.t. the LCS of FMs is equal to
the LCS of ChIsI LCS of FMs is a FMI ChI of ChIs is not guaranteed to be a ChII GpChI bounded conditionsI GpChI is not guaranteed to be a ChI
I InterestingI Can write out GPChI, but understand ...I Not the machines problem ...
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Fusion of fusions of CV information
I Multiple CV algorithms on GPR and EMI
I GP for candidates, GA for {µ1, ..., µk}I Proofs
I ChI w.r.t. the LCS of FMs is equal tothe LCS of ChIs
I LCS of FMs is a FMI ChI of ChIs is not guaranteed to be a ChII GpChI bounded conditionsI GpChI is not guaranteed to be a ChI
I InterestingI Can write out GPChI, but understand ...I Not the machines problem ...
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Fusion of fusions of CV information
I Multiple CV algorithms on GPR and EMI
I GP for candidates, GA for {µ1, ..., µk}I Proofs
I ChI w.r.t. the LCS of FMs is equal tothe LCS of ChIs
I LCS of FMs is a FMI ChI of ChIs is not guaranteed to be a ChII GpChI bounded conditionsI GpChI is not guaranteed to be a ChI
I Interesting
I Can write out GPChI, but understand ...I Not the machines problem ...
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Fusion of fusions of CV information
I Multiple CV algorithms on GPR and EMI
I GP for candidates, GA for {µ1, ..., µk}I Proofs
I ChI w.r.t. the LCS of FMs is equal tothe LCS of ChIs
I LCS of FMs is a FMI ChI of ChIs is not guaranteed to be a ChII GpChI bounded conditionsI GpChI is not guaranteed to be a ChI
I InterestingI Can write out GPChI, but understand ...
I Not the machines problem ...
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Fusion of fusions of CV information
I Multiple CV algorithms on GPR and EMI
I GP for candidates, GA for {µ1, ..., µk}I Proofs
I ChI w.r.t. the LCS of FMs is equal tothe LCS of ChIs
I LCS of FMs is a FMI ChI of ChIs is not guaranteed to be a ChII GpChI bounded conditionsI GpChI is not guaranteed to be a ChI
I InterestingI Can write out GPChI, but understand ...I Not the machines problem ...
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU
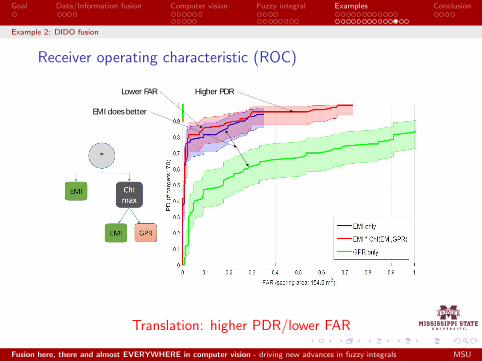
Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Receiver operating characteristic (ROC)
Lower FAR Higher PDR
EMI does better
Translation: higher PDR/lower FAR
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
GPR
Single ChIs
EMI
GpChI4 inputs
GpChI2 inputs
1st
2nd
3rd
4th
5th
Translation: Fusion of fusions beats a single ChI
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Unsolved challenges
I ConditioningI Even if [0, 1], same “trend” ((h(xi ) = 0.5) == (h(xj) = 0.5))?
I Can we explain it (physics explanation)?
I GP and bloating (likes long winded overfit solutions)
I Multiple µ learning (lots of constraints!)I Mathematically
I What MONSTER did we create?!?
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Unsolved challenges
I ConditioningI Even if [0, 1], same “trend” ((h(xi ) = 0.5) == (h(xj) = 0.5))?
I Can we explain it (physics explanation)?
I GP and bloating (likes long winded overfit solutions)
I Multiple µ learning (lots of constraints!)I Mathematically
I What MONSTER did we create?!?
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Unsolved challenges
I ConditioningI Even if [0, 1], same “trend” ((h(xi ) = 0.5) == (h(xj) = 0.5))?
I Can we explain it (physics explanation)?
I GP and bloating (likes long winded overfit solutions)
I Multiple µ learning (lots of constraints!)I Mathematically
I What MONSTER did we create?!?
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU
Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Unsolved challenges
I ConditioningI Even if [0, 1], same “trend” ((h(xi ) = 0.5) == (h(xj) = 0.5))?
I Can we explain it (physics explanation)?
I GP and bloating (likes long winded overfit solutions)
I Multiple µ learning (lots of constraints!)
I MathematicallyI What MONSTER did we create?!?
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Example 2: DIDO fusion
Unsolved challenges
I ConditioningI Even if [0, 1], same “trend” ((h(xi ) = 0.5) == (h(xj) = 0.5))?
I Can we explain it (physics explanation)?
I GP and bloating (likes long winded overfit solutions)
I Multiple µ learning (lots of constraints!)I Mathematically
I What MONSTER did we create?!?
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Wrap it up
Big Challenges (AS I SEE IT!) for fusion in CV
I Get the word out there
I Get wonderful FST aggregation work to the CV communityI Beat them at their own game, and new metricsI Hybridization of ML and FST
I ExplainableI Yes, we can learn an optimal µ from dataI Can we UNDERSTAND what µ (and FI) is doing?
I Big DataI (Variety) Multi-source: human, algorithm, sensor
I Information heterogeneity and uncertainties (new extensions)
I (Volume, Velocity) Efficient and scalable ideasI (Veracity) Incomplete (missing, noisy, etc.) data/information
I The Fuzzy Integral for Missing Data, FUZZ-IEEE, 2017
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Wrap it up
Big Challenges (AS I SEE IT!) for fusion in CV
I Get the word out thereI Get wonderful FST aggregation work to the CV community
I Beat them at their own game, and new metricsI Hybridization of ML and FST
I ExplainableI Yes, we can learn an optimal µ from dataI Can we UNDERSTAND what µ (and FI) is doing?
I Big DataI (Variety) Multi-source: human, algorithm, sensor
I Information heterogeneity and uncertainties (new extensions)
I (Volume, Velocity) Efficient and scalable ideasI (Veracity) Incomplete (missing, noisy, etc.) data/information
I The Fuzzy Integral for Missing Data, FUZZ-IEEE, 2017
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Wrap it up
Big Challenges (AS I SEE IT!) for fusion in CV
I Get the word out thereI Get wonderful FST aggregation work to the CV communityI Beat them at their own game, and new metrics
I Hybridization of ML and FST
I ExplainableI Yes, we can learn an optimal µ from dataI Can we UNDERSTAND what µ (and FI) is doing?
I Big DataI (Variety) Multi-source: human, algorithm, sensor
I Information heterogeneity and uncertainties (new extensions)
I (Volume, Velocity) Efficient and scalable ideasI (Veracity) Incomplete (missing, noisy, etc.) data/information
I The Fuzzy Integral for Missing Data, FUZZ-IEEE, 2017
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Wrap it up
Big Challenges (AS I SEE IT!) for fusion in CV
I Get the word out thereI Get wonderful FST aggregation work to the CV communityI Beat them at their own game, and new metricsI Hybridization of ML and FST
I ExplainableI Yes, we can learn an optimal µ from dataI Can we UNDERSTAND what µ (and FI) is doing?
I Big DataI (Variety) Multi-source: human, algorithm, sensor
I Information heterogeneity and uncertainties (new extensions)
I (Volume, Velocity) Efficient and scalable ideasI (Veracity) Incomplete (missing, noisy, etc.) data/information
I The Fuzzy Integral for Missing Data, FUZZ-IEEE, 2017
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Wrap it up
Big Challenges (AS I SEE IT!) for fusion in CV
I Get the word out thereI Get wonderful FST aggregation work to the CV communityI Beat them at their own game, and new metricsI Hybridization of ML and FST
I Explainable
I Yes, we can learn an optimal µ from dataI Can we UNDERSTAND what µ (and FI) is doing?
I Big DataI (Variety) Multi-source: human, algorithm, sensor
I Information heterogeneity and uncertainties (new extensions)
I (Volume, Velocity) Efficient and scalable ideasI (Veracity) Incomplete (missing, noisy, etc.) data/information
I The Fuzzy Integral for Missing Data, FUZZ-IEEE, 2017
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU
Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Wrap it up
Big Challenges (AS I SEE IT!) for fusion in CV
I Get the word out thereI Get wonderful FST aggregation work to the CV communityI Beat them at their own game, and new metricsI Hybridization of ML and FST
I ExplainableI Yes, we can learn an optimal µ from data
I Can we UNDERSTAND what µ (and FI) is doing?
I Big DataI (Variety) Multi-source: human, algorithm, sensor
I Information heterogeneity and uncertainties (new extensions)
I (Volume, Velocity) Efficient and scalable ideasI (Veracity) Incomplete (missing, noisy, etc.) data/information
I The Fuzzy Integral for Missing Data, FUZZ-IEEE, 2017
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Wrap it up
Big Challenges (AS I SEE IT!) for fusion in CV
I Get the word out thereI Get wonderful FST aggregation work to the CV communityI Beat them at their own game, and new metricsI Hybridization of ML and FST
I ExplainableI Yes, we can learn an optimal µ from dataI Can we UNDERSTAND what µ (and FI) is doing?
I Big DataI (Variety) Multi-source: human, algorithm, sensor
I Information heterogeneity and uncertainties (new extensions)
I (Volume, Velocity) Efficient and scalable ideasI (Veracity) Incomplete (missing, noisy, etc.) data/information
I The Fuzzy Integral for Missing Data, FUZZ-IEEE, 2017
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Wrap it up
Big Challenges (AS I SEE IT!) for fusion in CV
I Get the word out thereI Get wonderful FST aggregation work to the CV communityI Beat them at their own game, and new metricsI Hybridization of ML and FST
I ExplainableI Yes, we can learn an optimal µ from dataI Can we UNDERSTAND what µ (and FI) is doing?
I Big Data
I (Variety) Multi-source: human, algorithm, sensorI Information heterogeneity and uncertainties (new extensions)
I (Volume, Velocity) Efficient and scalable ideasI (Veracity) Incomplete (missing, noisy, etc.) data/information
I The Fuzzy Integral for Missing Data, FUZZ-IEEE, 2017
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU
Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Wrap it up
Big Challenges (AS I SEE IT!) for fusion in CV
I Get the word out thereI Get wonderful FST aggregation work to the CV communityI Beat them at their own game, and new metricsI Hybridization of ML and FST
I ExplainableI Yes, we can learn an optimal µ from dataI Can we UNDERSTAND what µ (and FI) is doing?
I Big DataI (Variety) Multi-source: human, algorithm, sensor
I Information heterogeneity and uncertainties (new extensions)
I (Volume, Velocity) Efficient and scalable ideasI (Veracity) Incomplete (missing, noisy, etc.) data/information
I The Fuzzy Integral for Missing Data, FUZZ-IEEE, 2017
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Wrap it up
Big Challenges (AS I SEE IT!) for fusion in CV
I Get the word out thereI Get wonderful FST aggregation work to the CV communityI Beat them at their own game, and new metricsI Hybridization of ML and FST
I ExplainableI Yes, we can learn an optimal µ from dataI Can we UNDERSTAND what µ (and FI) is doing?
I Big DataI (Variety) Multi-source: human, algorithm, sensor
I Information heterogeneity and uncertainties (new extensions)
I (Volume, Velocity) Efficient and scalable ideasI (Veracity) Incomplete (missing, noisy, etc.) data/information
I The Fuzzy Integral for Missing Data, FUZZ-IEEE, 2017
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Wrap it up
Big Challenges (AS I SEE IT!) for fusion in CV
I Get the word out thereI Get wonderful FST aggregation work to the CV communityI Beat them at their own game, and new metricsI Hybridization of ML and FST
I ExplainableI Yes, we can learn an optimal µ from dataI Can we UNDERSTAND what µ (and FI) is doing?
I Big DataI (Variety) Multi-source: human, algorithm, sensor
I Information heterogeneity and uncertainties (new extensions)
I (Volume, Velocity) Efficient and scalable ideas
I (Veracity) Incomplete (missing, noisy, etc.) data/informationI The Fuzzy Integral for Missing Data, FUZZ-IEEE, 2017
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Wrap it up
Big Challenges (AS I SEE IT!) for fusion in CV
I Get the word out thereI Get wonderful FST aggregation work to the CV communityI Beat them at their own game, and new metricsI Hybridization of ML and FST
I ExplainableI Yes, we can learn an optimal µ from dataI Can we UNDERSTAND what µ (and FI) is doing?
I Big DataI (Variety) Multi-source: human, algorithm, sensor
I Information heterogeneity and uncertainties (new extensions)
I (Volume, Velocity) Efficient and scalable ideasI (Veracity) Incomplete (missing, noisy, etc.) data/information
I The Fuzzy Integral for Missing Data, FUZZ-IEEE, 2017
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU
Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Wrap it up
Big Challenges (AS I SEE IT!) for fusion in CV
I Uncertainty
I Spatial, spectral and temporalI Multiple Instance Choquet Integral for Classifier Fusion, FUZZ-IEEE, 2016
I Data-drivenI Overfitting; learning algorithms and indices
I Visualization and Learning of the Choquet Integral With Limited Training Data,FUZZ-IEEE 2017
I Measure of the Shapley Index for Learning Lower Complexity Fuzzy Integrals, GranularComputing, 2017
I How to handle data unsupported variables?
I Is the FI enough?I Genetic Programming Based Choquet Integral for Multi-Source Fusion, FUZZ-IEEE, 2017I The Arithmetic Recursive Average as an Instance of the Recursive Weighted Power Mean,
FUZZ-IEEE 2017
I Accountable fusion in deep learning ...I Where is it happening, how, and what is it doing?
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Wrap it up
Big Challenges (AS I SEE IT!) for fusion in CV
I UncertaintyI Spatial, spectral and temporal
I Multiple Instance Choquet Integral for Classifier Fusion, FUZZ-IEEE, 2016
I Data-drivenI Overfitting; learning algorithms and indices
I Visualization and Learning of the Choquet Integral With Limited Training Data,FUZZ-IEEE 2017
I Measure of the Shapley Index for Learning Lower Complexity Fuzzy Integrals, GranularComputing, 2017
I How to handle data unsupported variables?
I Is the FI enough?I Genetic Programming Based Choquet Integral for Multi-Source Fusion, FUZZ-IEEE, 2017I The Arithmetic Recursive Average as an Instance of the Recursive Weighted Power Mean,
FUZZ-IEEE 2017
I Accountable fusion in deep learning ...I Where is it happening, how, and what is it doing?
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU
Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Wrap it up
Big Challenges (AS I SEE IT!) for fusion in CV
I UncertaintyI Spatial, spectral and temporal
I Multiple Instance Choquet Integral for Classifier Fusion, FUZZ-IEEE, 2016
I Data-drivenI Overfitting; learning algorithms and indices
I Visualization and Learning of the Choquet Integral With Limited Training Data,FUZZ-IEEE 2017
I Measure of the Shapley Index for Learning Lower Complexity Fuzzy Integrals, GranularComputing, 2017
I How to handle data unsupported variables?
I Is the FI enough?I Genetic Programming Based Choquet Integral for Multi-Source Fusion, FUZZ-IEEE, 2017I The Arithmetic Recursive Average as an Instance of the Recursive Weighted Power Mean,
FUZZ-IEEE 2017
I Accountable fusion in deep learning ...I Where is it happening, how, and what is it doing?
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Wrap it up
Big Challenges (AS I SEE IT!) for fusion in CV
I UncertaintyI Spatial, spectral and temporal
I Multiple Instance Choquet Integral for Classifier Fusion, FUZZ-IEEE, 2016
I Data-drivenI Overfitting; learning algorithms and indices
I Visualization and Learning of the Choquet Integral With Limited Training Data,FUZZ-IEEE 2017
I Measure of the Shapley Index for Learning Lower Complexity Fuzzy Integrals, GranularComputing, 2017
I How to handle data unsupported variables?
I Is the FI enough?I Genetic Programming Based Choquet Integral for Multi-Source Fusion, FUZZ-IEEE, 2017I The Arithmetic Recursive Average as an Instance of the Recursive Weighted Power Mean,
FUZZ-IEEE 2017
I Accountable fusion in deep learning ...I Where is it happening, how, and what is it doing?
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Wrap it up
Big Challenges (AS I SEE IT!) for fusion in CV
I UncertaintyI Spatial, spectral and temporal
I Multiple Instance Choquet Integral for Classifier Fusion, FUZZ-IEEE, 2016
I Data-drivenI Overfitting; learning algorithms and indices
I Visualization and Learning of the Choquet Integral With Limited Training Data,FUZZ-IEEE 2017
I Measure of the Shapley Index for Learning Lower Complexity Fuzzy Integrals, GranularComputing, 2017
I How to handle data unsupported variables?
I Is the FI enough?I Genetic Programming Based Choquet Integral for Multi-Source Fusion, FUZZ-IEEE, 2017I The Arithmetic Recursive Average as an Instance of the Recursive Weighted Power Mean,
FUZZ-IEEE 2017
I Accountable fusion in deep learning ...I Where is it happening, how, and what is it doing?
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Wrap it up
Big Challenges (AS I SEE IT!) for fusion in CV
I UncertaintyI Spatial, spectral and temporal
I Multiple Instance Choquet Integral for Classifier Fusion, FUZZ-IEEE, 2016
I Data-drivenI Overfitting; learning algorithms and indices
I Visualization and Learning of the Choquet Integral With Limited Training Data,FUZZ-IEEE 2017
I Measure of the Shapley Index for Learning Lower Complexity Fuzzy Integrals, GranularComputing, 2017
I How to handle data unsupported variables?
I Is the FI enough?I Genetic Programming Based Choquet Integral for Multi-Source Fusion, FUZZ-IEEE, 2017I The Arithmetic Recursive Average as an Instance of the Recursive Weighted Power Mean,
FUZZ-IEEE 2017
I Accountable fusion in deep learning ...I Where is it happening, how, and what is it doing?
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Wrap it up
Numerous colleagues and community
I Wife: Melissa Anderson (FI for forensic anthropology)
I MU: Jim Keller and Xiaoxiao Du
I MTU: Tim Havens and Tony Pinar
I Nottingham, UK: Christian Wagner
I MSU: Muhammad Islam and Ryan Smith (students)
I FU: Aina Zare
I NRL: Fred Petry and Paul Elmore (heterogeneous fusion)
I TSU: Daniel Wescott (forensic anthropology)
I Many others; Choquet, Sugeno, Hohle, Schmeidler,Murofushi, Grabisch, Yager, Mesiar, Labreuche, Beliakov, ...
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU

Goal Data/Information fusion Computer vision Fuzzy integral Examples Conclusion
Wrap it up
Thank you!Questions?
Fusion here, there and almost EVERYWHERE in computer vision - driving new advances in fuzzy integrals MSU