hooke’s law spring simple harmonic motion energy€™s law spring simple harmonic motion energy...
TRANSCRIPT

12/9/09 Physics 201, UW-Madison 1
Hooke’s Law
Spring
Simple Harmonic Motion
Energy

12/9/09 Physics 201, UW-Madison 2
relaxed position
FX = 0
x x=0
relaxed position
FX = -kx > 0
x x 0
FX = - kx < 0
x x > 0
relaxed position
x=0

12/9/09 Physics 201, UW-Madison 3
We know that if we stretch a spring with a mass on the end and let it go, the mass will oscillate back and forth (if there is no friction).
This oscillation is called Simple Harmonic Motion, and is actually easy to understand...
k m
k m
k m

12/9/09 Physics 201, UW-Madison 4
k
x
m
a differential equation
md 2xdt 2
d 2xdt 2
= −kmx
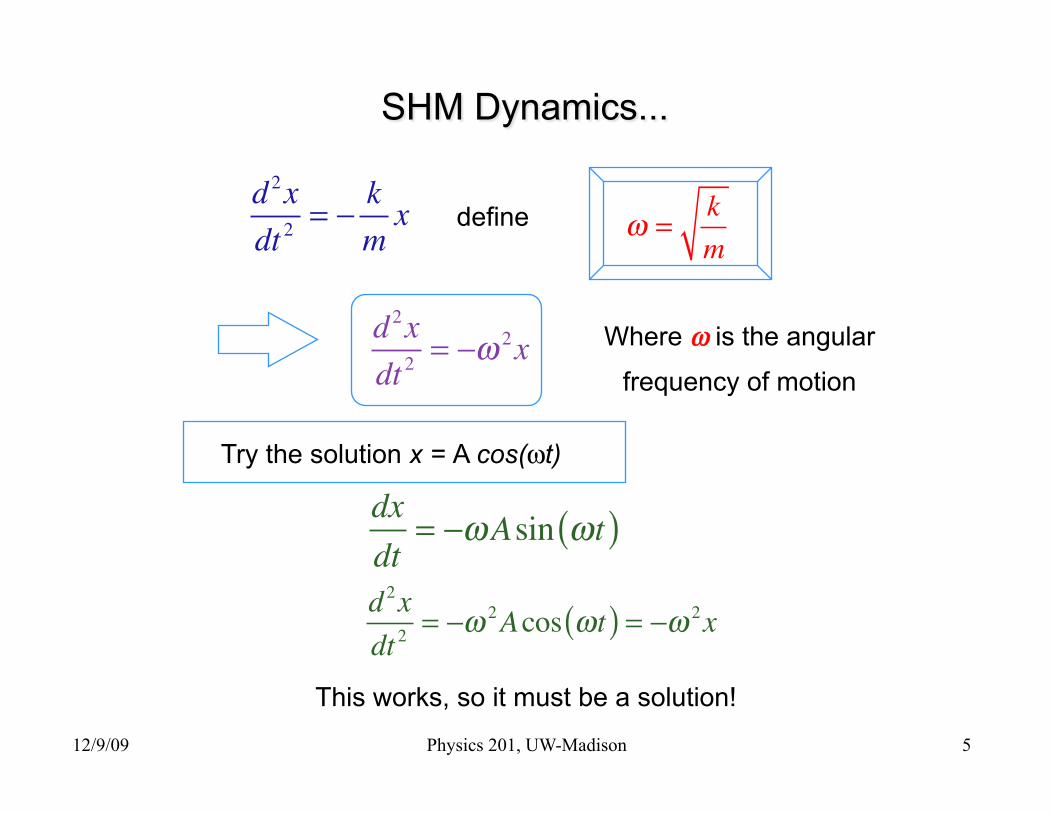
12/9/09 Physics 201, UW-Madison 5
Try the solution x = A cos(ωt)
This works, so it must be a solution!
define
Where ω is the angular
frequency of motion
d 2xdt 2
= −kmx ω =
km
d 2xdt 2
= −ω 2x
dxdt
= −ωAsin ωt( )d 2xdt 2
= −ω 2Acos ωt( ) = −ω 2x

12/9/09 Physics 201, UW-Madison 6
We just showed that (from F = ma)
has the solution x = A cos(ωt) but … x = A sin(ωt) is also a solution.
The most general solution is a linear combination (sum) of these two solutions!
ok
x = Bsin ωt( ) + C cos ωt( ) = Acos ωt + φ( )
d 2xdt 2
= −ω 2x
dxdt
=ωBcos ωt( ) −ωC sin ωt( )
d 2xdt 2
= −ω 2Bsin ωt( ) −ω 2C cos ωt( ) = −ω 2x

12/9/09 Physics 201, UW-Madison 7
But wait a minute...what does angular frequency ω have to do with moving back & forth in a straight line ??
x = Acos ω t +ϕ( )
x
y
-1
1
0
1 2
3
4
5 6
θ
1 2
3
4 5
6
π
π2
The spring’s motion with amplitude A is identical to the x-component of a particle in uniform circular motion with radius A.

12/9/09 Physics 201, UW-Madison 8
A mass m = 2 kg on a spring oscillates with amplitude A = 10 cm. At t = 0 its speed is maximum, and is v = +2 m/s. What is the angular frequency of oscillation ω? What is the spring constant k?
k
x
m
vMAX = ωA
Also: k = mω2
So k = (2 kg) x (20 s -1) 2 = 800 kg/s2 = 800 N/m
ω =vMAXA
=2m s10cm
= 20 s−1
ω =km

12/9/09 Physics 201, UW-Madison 9
k
x
m
0
Use “initial conditions” to determine phase φ!
Suppose we are told x(0) = 0 , and x is initially increasing (i.e. v(0) = positive):
x(0) = 0 = A cos(φ) φ = π/2 or -π/2 v(0) > 0 = -ωA sin(φ) φ < 0
x(t) = A cos(ωt + φ) v(t) = -ωA sin(ωt + φ) a(t) = -ω2A cos(ωt + φ)
π 2π
sinθ cosθ
θ φ = -π/2 So

12/9/09 Physics 201, UW-Madison 10
k
x
m
0
x(t) = A cos(ωt - π/2 ) v(t) = -ωA sin(ωt - π/2 ) a(t) = -ω2A cos(ωt - π/2 )
So we find φ= -π/2
x(t) = A sin(ωt) v(t) = ωA cos(ωt) a(t) = -ω2A sin(ωt)
π 2π ωt
x(t) A
-A

12/9/09 Physics 201, UW-Madison 11
We already know that for a vertical spring if y is measured from
the equilibrium position
The force of the spring is the negative derivative of this function:
So this will be just like the horizontal case: k
m F = -ky
y = 0
Which has solution y = A cos(ωt + φ)
where
U =12ky2
−ky = ma = md 2ydt 2
ω =km

12/9/09 Physics 201, UW-Madison 12
Recall that the torque due to gravity about the rotation (z) axis is
τ = -mgd d = Lsin θ ≈ Lθ for small θ so τ = -mg Lθ
But τ = Iα, where I = mL2
θ L
d m
mg
z
θ = θ0 cos ωt +ϕ( )
τ = Id 2θdt 2
where
Differential equation for simple harmonic motion!
d 2θdt 2
= −ω 2θ ω =gL

12/9/09 Physics 201, UW-Madison 13
You are sitting on a swing. A friend gives you a small push and you start swinging back & forth with period T1.
Suppose you were standing on the swing rather than sitting. When given a small push you start swinging back & forth with period T2.
Which of the following is true:
(a) T1 = T2
(b) T1 > T2 (c) T1 < T2

12/9/09 Physics 201, UW-Madison 14
We have shown that for a simple pendulum
Since
If we make a pendulum shorter, it oscillates faster (shorter period)
Recall the pendulum depended on the torque from gravity. Now the moment arm is from the center of mass and the oscillation point so L is shorter
ω =gL
T = 2π Lg
T =2πω

12/10/09 Physics 201, UW-Madison 15
Solution: s = A cos(ωt + φ)
Force: k
s
m
0
k
m
s
0
s L
d 2sdt 2
= −ω 2s
ω =km
ω =gL

12/10/09 16
x = Acos ωt( )
v =dxdt
= −ωAsin ωt( )
K =12mv2 =
12mω 2A2 sin2 ωt( )
U
K
t
t
t
U = 12kx2 = 1
2kA2 cos2 ωt( )
E = K +U = KMax =12mω2A2 =UMax =
12k2A2

12/10/09 Physics 201, UW-Madison 17
U =12kx2
K =12mv2
E =U + K
=12kA2 =
12mv2max
U =12kx2

12/10/09 Physics 201, UW-Madison 18
For both the spring and the pendulum, we can derive the SHM solution by using energy conservation.
The total energy (K + U) of a system undergoing SHM will always be constant!
This is not surprising since there are only conservative forces present, hence K+U energy is conserved.
-A A 0 s
U
U
K E

12/10/09 Physics 201, UW-Madison 19
m x x=0
Etotal = 1/2 Mv2 + 1/2 kx2 = constant
KE PE
KEmax = Mv2max /2 = Mω2A2 /2 =kA2 /2
PEmax = kA2 /2
Etotal = kA2 /2

12/10/09 Physics 201, UW-Madison 20
U ≈12kx2
for small x

12/10/09 Physics 201, UW-Madison 21
Suppose we have some arbitrarily shaped solid of mass M hung on a fixed axis, and that we know where the CM is located and what the moment of inertia I about the axis is.
The torque about the rotation (z) axis for small θ is (using sin θ ≈ θ)
τ = -Mgd -MgRθ θ
d Mg
z-axis
R
x CM
−MgRθ = I d2θdt 2
d 2θdt 2
= −ω 2θ ω =MgRIwhere
τ α
≈
θ = θ0 cos ω t +ϕ( )

12/10/09 Physics 201, UW-Madison 22
Consider an object suspended by a wire attached at its CM. The wire defines the rotation axis, and the moment of inertia I about this axis is known.
The wire acts like a “rotational spring.” When the object is rotated, the wire is twisted.
This produces a torque that opposes the rotation.
In analogy with a spring, the torque produced is proportional to the displacement: τ = -kθ
I
wire
θ τ

12/10/09 Physics 201, UW-Madison 23
Since τ = -kθ, τ = Iα becomes
−kθ = Id 2θdt 2
d 2θdt 2
= −ω 2θ ω =kIwhere I
wire
θ τ
This is similar to the “mass on spring” except I has taken the place of m (no surprise).

12/10/09 Physics 201, UW-Madison 24
In many real systems, nonconservative forces are present The system is no longer ideal Friction is a common nonconservative force
In this case, the mechanical energy of the system diminishes in time, the motion is said to be damped
The amplitude decreases with time The blue dashed lines on the graph represent the envelope of the
motion

12/10/09 Physics 201, UW-Madison 25
One example of damped motion occurs when an object is attached to a spring and submerged in a viscous liquid
The retarding force can be expressed as R = - b v where b is a constant b is called the damping
coefficient The restoring force is – kx From Newton’s Second Law
ΣFx = -k x – bvx = max
or,
md 2xdt 2
+ bdxdt
+ kx = 0

12/10/09 Physics 201, UW-Madison 26
When b is small enough, the solution to this equation is:
with
(This solution applies when b<2mω0.)
md 2xdt 2
+ bdxdt
+ kx = 0
x = A0e−(b /2m )t cos( ′ω t + δ )
′ω =ω0 1− b2mω0
⎛⎝⎜
⎞⎠⎟
2
, ω0 =km

12/10/09 Physics 201, UW-Madison 27
The position can be described by
The angular frequency is
When the retarding force is small, the oscillatory character of the motion is preserved, but the amplitude decreases exponentially with time
The motion ultimately ceases
x = A0e−(b /2m )t cos( ′ω t + δ )
′ω =km
−b2m
⎛⎝⎜
⎞⎠⎟2

The energy of a weakly damped harmonic oscillator decays exponentially in time.
12/10/09 Physics 201, UW-Madison 28
The potential energy is ½kx2:
x2 = A0e−(b /2m )t cos( ′ω t + δ )( )2
= A02e−(b /m )t cos2 ( ′ω t + δ )
Average over a period when (b/m)<<ω’: Average of cos2 = ½, so averaged over a period,
x2 ≈ A02e−(b /m )t .

12/10/09 Physics 201, UW-Madison 29
The kinetic energy is ½mv2:
v2 =ddt
A0e−(b /2m )t cos( ′ω t + δ )( )⎛
⎝⎜⎞⎠⎟2
= −(b / 2m)A0e−(b /2m )t cos( ′ω t + δ ) − A0e
−(b /2m )t sin( ′ω t + δ )( )2Average energy over a period when (b/m)<<ω’:
Average of cos2 = average of sin2 = ½, and average of sinx cosx=0, so averaged over a period,
v2 ∝ e−(b /m )t .
The energy of a weakly damped harmonic oscillator decays exponentially in time.

12/10/09 Physics 201, UW-Madison 30
Both kinetic and potential energy (averaged over a period) decay as e-(b/m)t. So total energy is proportional to e-(b/m)t.
The energy of a weakly damped harmonic oscillator decays exponentially in time.

12/10/09 Physics 201, UW-Madison 31
ω0 is also called the natural frequency of the system If Rmax = bvmax < kA, the system is said to be underdamped When b reaches a critical value bc such that bc / 2 m = ω0 , the system will not
oscillate The system is said to be critically damped
If Rmax = bvmax > kA and b/2m > ω0, the system is said to be overdamped For critically damped and overdamped there is no angular frequency

12/10/09 Physics 201, UW-Madison 32
It is possible to compensate for the loss of energy in a damped system by applying an external sinusoidal force (with angular frequency ω)
The amplitude of the motion remains constant if the energy input per cycle exactly equals the decrease in mechanical energy in each cycle that results from resistive forces
After a driving force on an initially stationary object begins to act, the amplitude of the oscillation will increase
After a sufficiently long period of time, Edriving = Elost to internal Then a steady-state condition is reached The oscillations will proceed with constant amplitude
The amplitude of a driven oscillation is
ω0 is the natural frequency of the undamped oscillator

12/10/09 Physics 201, UW-Madison 33
When ω » ω0 an increase in amplitude occurs This dramatic increase in the amplitude is
called resonance The natural frequency w0 is also called the
resonance frequency At resonance, the applied force is in phase
with the velocity and the power transferred to the oscillator is a maximum The applied force and v are both
proportional to sin (ωt + φ) The power delivered is F . v
» This is a maximum when F and v are in phase
Resonance (maximum peak) occurs when driving frequency equals the natural frequency
The amplitude increases with decreased damping The curve broadens as the damping increases The shape of the resonance curve depends on b

12/10/09 Physics 201, UW-Madison 34
The amplitude of a system moving with simple harmonic motion is doubled. The total energy will then be
4 times larger 2 times larger the same as it was half as much quarter as much
U =12kx2 +
12mv2
at x = A,v = 0
U =12kA2

12/10/09 Physics 201, Fall 2006, UW-Madison 35
A glider of mass m is attached to springs on both ends, which are attached to the ends of a frictionless track. The glider moved by 0.2 m to the right, and let go to oscillate. If m = 2 kg, and spring constants are k1 = 800 N/m and k2 = 500 N/m, the frequency of oscillation (in Hz) is approximately
6 Hz 2 Hz 4 Hz 8 Hz 10 Hz f =
ω2π
=k / m2π
=
800 + 5002
2π= 4 Hz

12/10/09 Physics 201, Fall 2006, UW-Madison 36
A 810-g block oscillates on the end of a spring whose force constant is 60 N/m. The mass moves in a fluid which offers a resistive force proportional to its speed – the proportionality constant is 0.162 N.s/m.
Write the equation of motion and solution.
What is the period of motion?
What is the fractional decrease in amplitude per cycle?
Write the displacement as a function of time if at t = 0, x = 0 and at t = 1 s, x = 0.120 m.
0.730 s
0.070
Fs + FR = ma
md 2xdt 2 = −kx − b
dxdt
Solution: x(t) = Ae−b
2mtcos(ωt + φ)
ω =km
−b
2m⎛⎝⎜
⎞⎠⎟
2
Solution: x(t) = 0.182e−0.100t sin(8.61t + φ)