http:// sparse kernels methods steve gunn
Post on 21-Dec-2015
213 views
TRANSCRIPT

http://www.isis.ecs.soton.ac.uk
Sparse Kernels MethodsSparse Kernels Methods
Steve Gunn

OverviewOverview
Part I : Introduction to Kernel Methods
Part II : Sparse Kernel Methods
Part IPart I
Introduction to
Kernel Methods

ClassificationClassification
Consider 2 class problem
f x
1
1
Class A
Class B

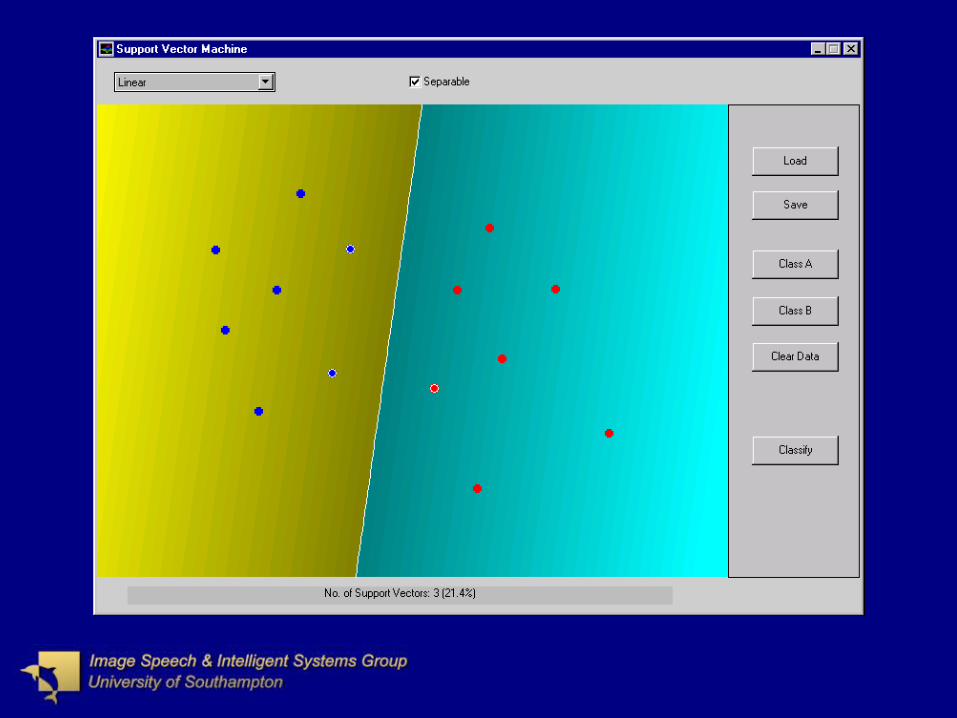
Optimal Separating HyperplaneOptimal Separating Hyperplane

Optimal Separating HyperplaneOptimal Separating Hyperplane
y y R yl ln
1 1 1 1, , , , , , ,x x x
w x b 0
Separate the data,
with a hyperplane,
such that the data is separated without error, and the distance
between the closest vector to the hyperplane is maximal.

SolutionSolution
w w w 1
2
The optimal hyperplane minimises,
subject to the constraints,
y b i li iw x 1 1, , ,
and is obtained by finding the saddle point of the Lagrange functional
L b b yi ii
l
w w w x w, , 1
21
1

Finding the OSHFinding the OSH
Size is dependent upon training set size
Unique global minimum
min
1
2T TH c
Quadratic Programming Problem
TiY i l 0 0 1, , , , .

Support VectorsSupport Vectors
Information contained in support vectors
Can throw away rest of training data
SVs have non zero Lagrange multipliers

Generalised Separating HyperplaneGeneralised Separating Hyperplane

Non Separable CaseNon Separable Case
Introduce slack Variables
y b i li i iw x 1 1 , , ,
w w w, 1
2 1
C ii
l
Minimise
C is chosen a priori
and determines trade-off to non-separable case.

Size is dependent upon training set size
Unique global minimum
min
1
2T TH c
Quadratic Programming Problem
0 1
01
i
i ii
l
C i l
y
, , ,
.
Finding the GSHFinding the GSH


Non-Linear SVMNon-Linear SVM
Map input space to high dimensional feature space
Find OSH or GSH in Feature Space

Kernel FunctionsKernel Functions
Hilbert Schmidt Theory
Mercer’s Conditions
K x x k x k xi j i j,
K x x x x
K x x g x g x dx dx g x dx
i j m i jm
m
i j i j i j i i
, ,
, ,
1
2
0
0
K x xi j, is a symmetric function

Polynomial Degree 2Polynomial Degree 2
k
x
x
x
x
x x
Kx x y x y
1
2
2
2
1
1
2
12
22
1 2
2,
K k kx y x y,

Acceptable Kernel FunctionsAcceptable Kernel Functions
Polynomial
Multi-Layer Perceptrons
Radial Basis Functions
K x x x x
K x x x xd
i j i j
d
i j i j
d
,
,, ,...
11
K x x
x xi j
i j, exp
2
2
K x x b x x ci j i j, tanh

Iris Data SetIris Data Set





RegressionRegression
Approximation Error
Model Size
Generalisation
Estimation Error

RegressionRegression
y y R y Rl ln
1 1, , , , , ,x x x
Approximate the data,
with a hyperplane,
and the SRM principle.
f x b, w x
w w cn
using a loss function, e.g.,
L y f a y f a, , ,x x

SolutionSolution
w w w, ,* *
1
2 1 1
C ii
l
ii
l
w x
w x
i i i
i i i
i
i
b y
b yi l
*
*,...,
0
0
1
Introduce slack variables and minimise
subject to the constraints

Finding the SolutionFinding the Solution
Size is dependent upon training set size
Unique global minimum
Quadratic Programming Problem
0 1
0 1
01
i
i
i ii
l
C i l
C i l
, , ,
, , , .*
*
minx
T Tx Hx c x1
2 x
*
where

Part I : SummaryPart I : Summary
Unique Global Minimum
Addresses Curse of Dimensionality
Complexity dependent upon data set size
Information contained in Support Vectors
Part IIPart II
Sparse Kernel Methods
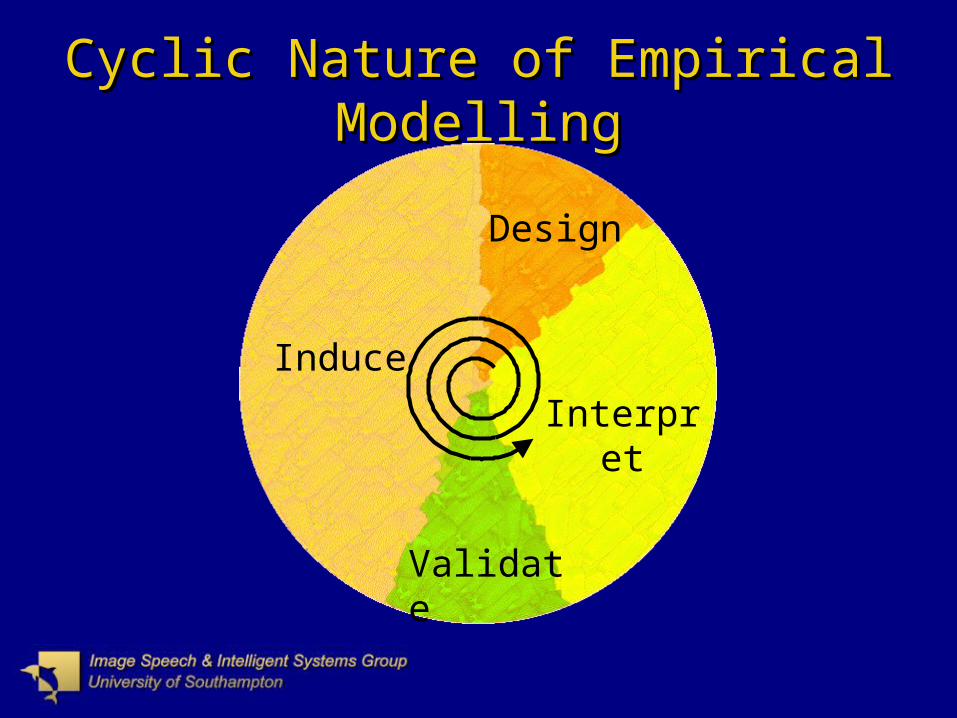
Cyclic Nature of Empirical ModellingCyclic Nature of Empirical Modelling
Induce
Validate
Interpret
Design

InductionSVMs have strong theory
Good empirical performance
Solution of the form,
InterpretationInput Selection
Transparency
SVs
,xxx iiKf

Additive RepresentationAdditive Representation
f f f x f x x fi ii
n
i j i jj i
n
i
n
n( ) ,, , , ,x x 0
1 111 2 ...
Additive structure
Transparent
Rejection of redundant inputs
Unique decomposition
Sparse Kernel RegressionSparse Kernel Regression
, , 0i j j i ji j
f c K c x x x
,i ii
f Kx x x
Previously ….
Now

The PriorsThe Priors
“Different priors for different parameters”
Smoothness – controls “overfitting”
Sparseness – enables input selection and controls overfitting
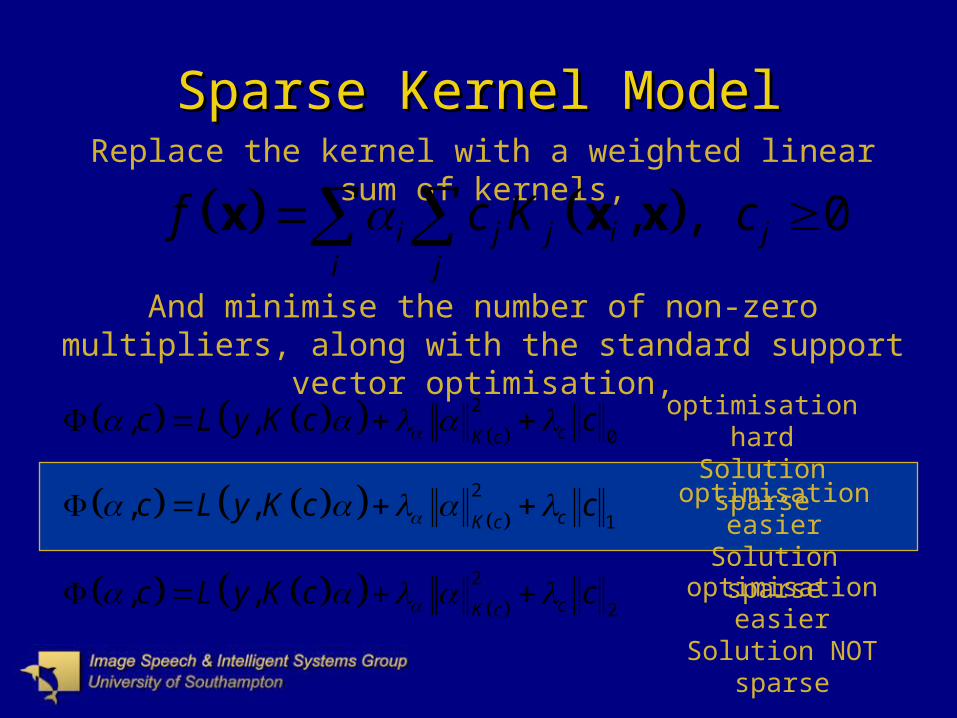
Sparse Kernel ModelSparse Kernel Model
2
0, , cK cc L y K c c
Replace the kernel with a weighted linear sum of kernels,
And minimise the number of non-zero multipliers, along with the standard support vector optimisation,
optimisation hardSolution sparse
2
1, , cK cc L y K c c
2
2, , cK cc L y K c c
optimisation easierSolution sparse
optimisation easierSolution NOT sparse
, , 0i j j i ji j
f c K c x x x

Choosing the Sub-KernelsChoosing the Sub-Kernels
• Avoid additional parameters if possible
• Sub-models should be flexible

Spline KernelSpline Kernel
dttvtuuvvukspline 1
01,
3,min6
1,min
21, vuvu
uvuvvukspline

Tensor Product SplinesTensor Product Splines
n
d
ddANOVA vukvuK
1
,1,
),(),(),(),(1),(1 221122112
1
vukvukvukvukvukd
dd
3,min6
1,min
2, vuvu
uvuvvuk
The univariate spline which passes through the origin has a kernel of the form,
E.g. for a two input problem the ANOVA kernel is given by
And the multivariate ANOVA kernel is given by
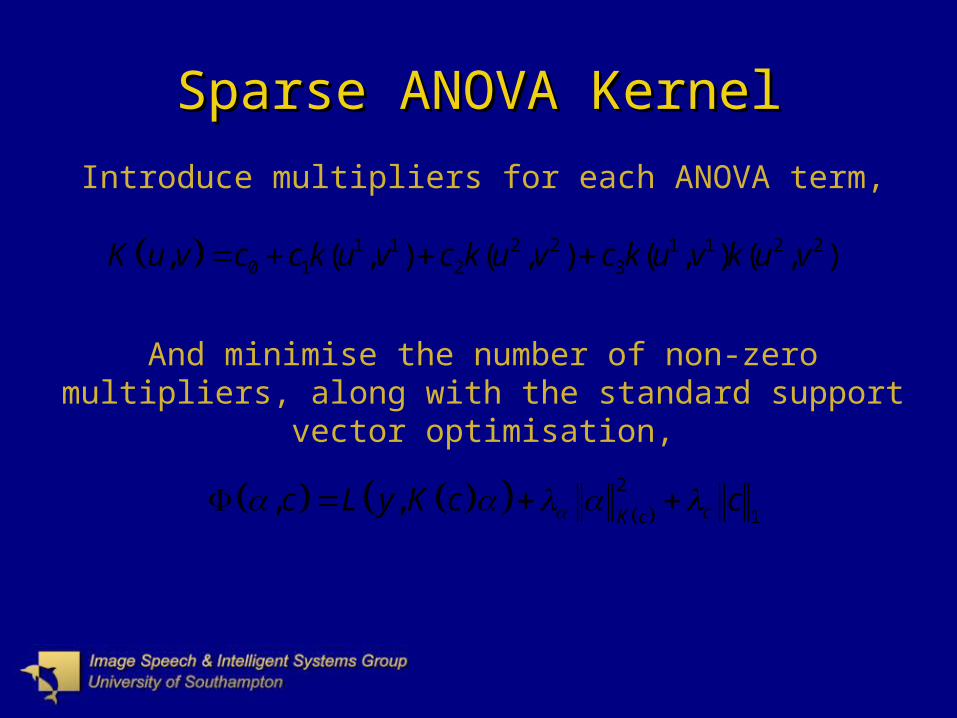
Sparse ANOVA KernelSparse ANOVA Kernel
1 1 2 2 1 1 2 20 1 2 3, ( , ) ( , ) ( , ) ( , )K u v c c k u v c k u v c k u v k u v
Introduce multipliers for each ANOVA term,
And minimise the number of non-zero multipliers, along with the standard support vector optimisation,
2
1, , cK cc L y K c c

OptimisationOptimisation

Quadratic LossQuadratic Loss

Epsilon-Insensitive LossEpsilon-Insensitive Loss

AlgorithmAlgorithm
ModelSparse ANOVA
Selection
ParameterSelection
Data
ANOVA BasisSelection
3+ Stage Technique
Each stage consists of solving a convex, constrained optimisation problem. (QP or LP)
Auto-selection of Parameters
Capacity Control Parametercross-validation
Sparseness ParameterValidation error Stage I

Sparse Basis SolutionSparse Basis Solution
0subject tomin1
2
2 i
ccccy
0subject to21min iTTT
cccycc
0subject tomin1,1
i
ccccy
.0
,0
,0
,subject to
1
1
1
min
j
j
i
T
n
m
c
y
y
n
m
c
II
II
n
m
c
c
Quadratic Loss Function (Quadratic Program)
-Insensitive Loss Function (Linear Program)

AMPG ProblemAMPG Problem
Predict automobile MPG (392 samples)
Inputs:no. of cylinders, displacement
horsepower, weight
acceleration, year
Output: MPG

60 80 100 120 140 160 180 200 220-7
-6
-5
-4
-3
-2
-1
0
Horse Power
MP
G
2000 2500 3000 3500 4000 4500 5000-14
-12
-10
-8
-6
-4
-2
0
Weight
MP
G
70 72 74 76 78 80 82-1
0
1
2
3
4
5
6
7
8
9
Year
MP
G
Horse Power 50 86 122
Horse Power 158 194 230
Network transparency through ANOVA representation.

SUPANOVA AMPG Results (SUPANOVA AMPG Results (=2.5)=2.5)
Loss Function Estimated Generalisation Error
Stage I Stage III Linear ModelTraining Testing
Mean Variance Mean Variance Mean Variance
Quadratic Quadratic 6.97 7.39 7.08 6.19 11.4 11.0
Insensitive Insensitive 0.48 0.04 0.49 0.03 1.80 0.11
Quadratic Insensitive 1.10 0.07 1.37 0.10
Insensitive Quadratic 7.07 6.52 7.13 6.04 11.72 10.94
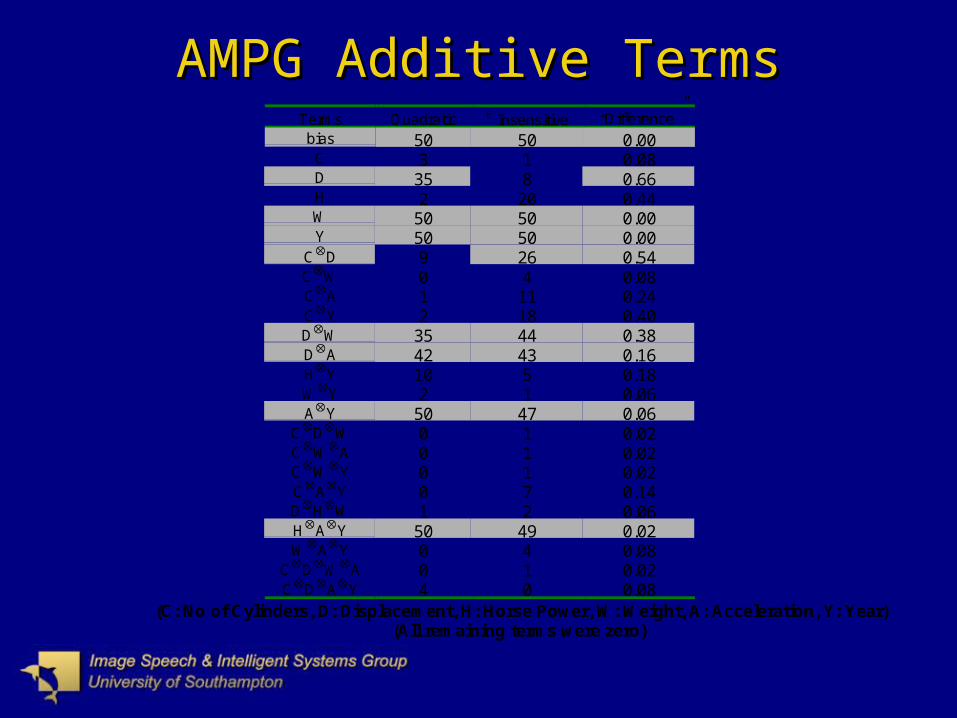
AMPG Additive TermsAMPG Additive TermsTerms Quadratic Insensitive “Difference”bias 50 50 0.00C 3 1 0.08D 35 8 0.66H 2 20 0.44W 50 50 0.00Y 50 50 0.00
CD 9 26 0.54CW 0 4 0.08CA 1 11 0.24CY 2 18 0.40DW 35 44 0.38DA 42 43 0.16HY 10 5 0.18WY 2 1 0.06AY 50 47 0.06
CDW 0 1 0.02CWA 0 1 0.02CWY 0 1 0.02CAY 0 7 0.14DHW 1 2 0.06HAY 50 49 0.02WAY 0 4 0.08
CDWA 0 1 0.02CDAY 4 0 0.08
(C: No of Cylinders, D: Displacement, H: Horse Power, W: Weight, A: Acceleration, Y: Year)(All remaining terms were zero)

SummarySummary
SUPANOVA is a global approach
Strong Basis (Kernel Methods)
Can control loss function and sparseness
Can impose limit on maximum variate terms
Generalisation + Transparency

Further InformationFurther Information
http://www.isis.ecs.soton.ac.uk/
isystems/kernel/
SVM Technical Report
MATLAB SVM Toolbox
Sparse Kernel Paper
These Slides