ieee projects 2014 - 2015 abstracts - robotics 06
TRANSCRIPT
8/11/2019 IEEE Projects 2014 - 2015 Abstracts - Robotics 06
http://slidepdf.com/reader/full/ieee-projects-2014-2015-abstracts-robotics-06 1/3
www.ingenstech.com
| www
.i n g en s t e ch . c om | www
.i n g en s t e ch . c om | www
.i n g en s t e ch . c om | www
.i n g en s t e ch . c om | www
.i n g en s t e ch . c om |
RFID Based Missing Weapons Reporting Robot Wireless
Abstract
In a military unit all the weapons are generally stored in a large barrack type arrangement which is abig hall containing all weapons and ammunitions. Monitoring this place continuously is of atmostimportance. Both during peace time and war time the weapons storage facility is continuouslymonitored to ensure that no weapons go missing. This process of checking whether weapons aremissing is a tedious and a time consuming work and is also prone to human errors and mistakes.
This project aims at developing a robot which does the job of checking whether all the weapons arepresent, automatically. The robot essentially contains a RFID reader, a microcontroller and a wirelesstransceiver. For this system to work all the weapons are fitted with a compact RFID tag. This way all
the weapons get a unique identification.
The microcontroller on the robot is programmed to scan the entire location. So when the robot isplaced in the room and turned on, it automatically moves through every part of the room. While therobot is passing through the room, it picks up the details of the RFID tags attached on the weapons.So as it moves it collects information of the weapons that are present in the room. This informationis transmitted as and when it is collected to a central monitoring in such as a PC.
For viewing the details a VB program is used which automatically creates a list of all the weaponspresent from the information received from the robot. Further the application can be extended toconnect to a data base of all the weapons that are issued out. Using this information the VB program
can easily compare the details of the weapons present, and the weapons that have been issued out.After comparing it can easily generate a report of the actually missing weapons.
Existing System
1. Weapon storage go down is monitored by the personal authorities.2. The process of checking whether weapons are missing is a tedious and a time consuming
work.
Proposed System
1. Entire storage location is scanned by the robot automatically.
2. The information is transmitted to the central monitoring then and there.
3. If any weapons missing, then it can be identified easily.
© Ingens Tech Private Limited | For Students Use Only | All Rights Reservedwww.ingenstech.com | IEEE Projects 2014 - 2015 abstracts | Final Year Projects
8/11/2019 IEEE Projects 2014 - 2015 Abstracts - Robotics 06
http://slidepdf.com/reader/full/ieee-projects-2014-2015-abstracts-robotics-06 2/3
www.ingenstech.com
| www
.i n g en s t e ch . c om | www
.i n g en s t e ch . c om | www
.i n g en s t e ch . c om | www
.i n g en s t e ch . c om | www
.i n g en s t e ch . c om |
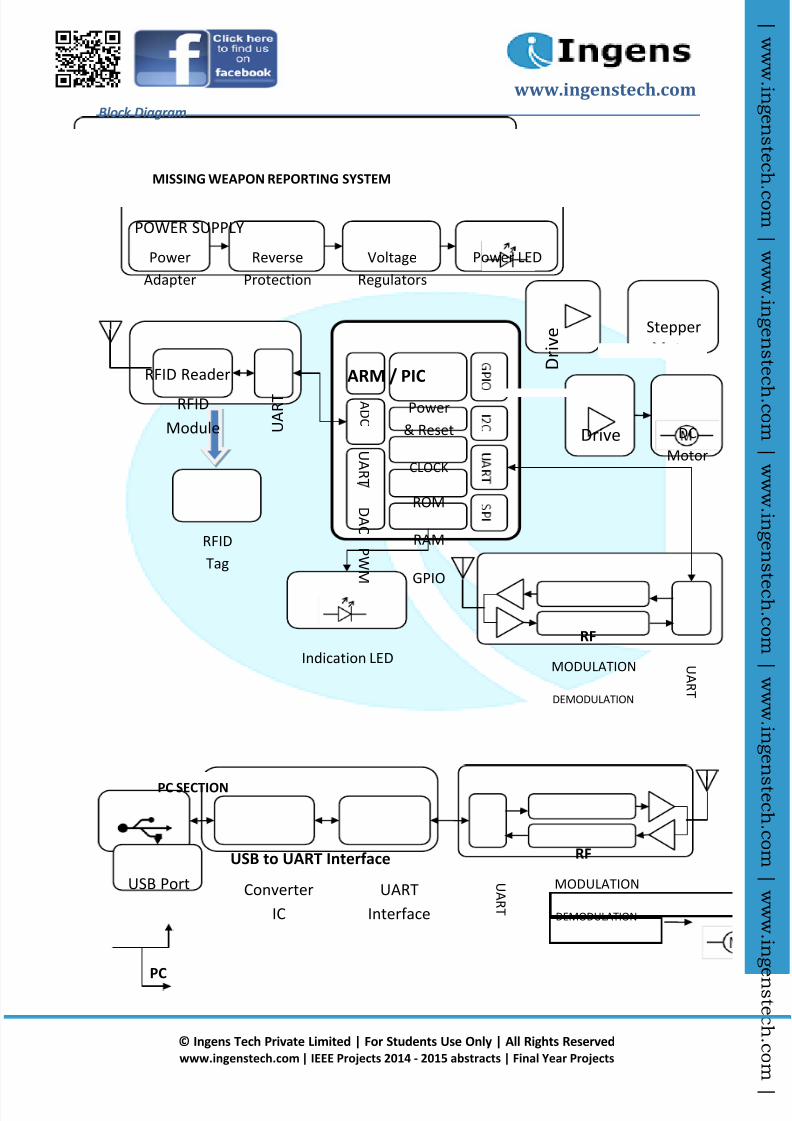
Block Diagram
POWER SUPPLY
PowerAdapter
ReverseProtection
VoltageRegulators
Power LED
RF
U A R T
MODULATION
DEMODULATION
ARM / PIC
A D
C
U A R T
D A C P W M
Power& Reset
GPIO
ROM
RAM
CLOCK
Drive DCMotor
RFID Reader
U A R TRFID
Module
RFIDTag
Indication LED
D r i v e Stepper
Motor
USB to UART Interface
USB Port ConverterIC
UARTInterface
RF
U A R T
MODULATION
DEMODULATION
PC
MISSING WEAPON REPORTING SYSTEM
PC SECTION
© Ingens Tech Private Limited | For Students Use Only | All Rights Reservedwww.ingenstech.com | IEEE Projects 2014 - 2015 abstracts | Final Year Projects
8/11/2019 IEEE Projects 2014 - 2015 Abstracts - Robotics 06
http://slidepdf.com/reader/full/ieee-projects-2014-2015-abstracts-robotics-06 3/3
www.ingenstech.com
| www
.i n g en s t e ch . c om | www
.i n g en s t e ch . c om | www
.i n g en s t e ch . c om | www
.i n g en s t e ch . c om | www
.i n g en s t e ch . c om |
Software Tools
• LPCXpresso IDE / MPLAB IDE• EAGLE• Orcad• Visual Studio• Embedded C
Hardware Required
• ARM LPC11U67 / PIC18F45K22• RF Transceiver• RFID Reader• PC Interface• PC• Motor Drive• Motors
© Ingens Tech Private Limited | For Students Use Only | All Rights Reservedwww.ingenstech.com | IEEE Projects 2014 - 2015 abstracts | Final Year Projects