improving frequentist prediction intervals for ar models by simulation
TRANSCRIPT

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Improving frequentist prediction intervals forAR models by simulation
J. Helske and J. Nyblom
Department of Mathematics and StatisticsUniversity of Jyvaskyla
Oxford 29–30 June, 2010
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Table of contents
1 Introduction and motivation
2 Prediction formulae
3 Regression and autoregression
4 Bayesian prediction
5 Generalization
6 Simulations
7 Example
8 References
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Criticism
Chatfield(1993): Reasons why a prediction interval may bewrong
Parameters are estimated.
Errors are not normally distributed.
The model is wrong.
The model will change in the future.
Here we consider the first issue.
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Some earlier work for AR models
Focus on prediction mean squared error (analytic andbootstrap):
Phillips(1979), J of EconometricsFuller and Hasza (1981), JASAAnsley and Kohn (1986), BiometrikaQuenneville and Singh (2002), JTSAPfeffermann and Tiller (2005), JTSA
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Some earlier work for AR models
Prediction interval with estimated parameters:
Barndorff-Nielsen and Cox (1996), BernoulliVidoni (2004, 2009), JTSA
Bootstrap solutions:
Beran (1990), JASAMasarotto (1990), Int. J. of ForecastingGrigoletto (1998), Int. J. of ForecastingKim (2004), Int. J. of ForecastingPascual, Romo and Ruiz (2004), JTSAClements and Kim (2007), Comp. Stat. & Data Anal.Kabaila and Syuhada (2008), JTSARodrıguez and Ruiz (2009), JTSA
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
AR(1): One step ahead
−0.5 0.0 0.5
0.85
0.86
0.87
0.88
0.89
0.90
0.91
β1
Cov
erag
e pr
obab
ility
−0.9 −0.5 0.5 0.9
yt = β0 + β1yt−1 + εt , εt ∼ NID(0, σ2), t = 1, . . . , 30.Goal: 90 % prediction intervalUpper = New, Lower = Standard.Based on a simulation study.
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
AR(1): Formulae: parameters known
Prediction interval, 1 step ahead:
β0 + β1yn ± σzα,
Prediction interval, k step ahead:
β01 − βk
1
1 − β1+ βk
1 yn ± σ
√1 − β2k
1
1 − β21
zα.
Lower limit = L(y ,θ), upper limit = U(y ,θ), θ = (β0, β1, σ)′,
Pθ(L(y ,θ) ≤ yn+k ≤ U(y ,θ) | y) = 1 − 2α.
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
AR(1): Frequentist coverage probability
Parameter estimates θ = θ(y).
Pθ(L(y , θ) ≤ yn+k ≤ U(y , θ) | y)
varies across samples (and also with parameters)!Goal
Eθ
[P(L(y , θ) ≤ yn+k ≤ U(y , θ) | y)
]= 1 − 2α (1)
or at least ≈ 1 − 2α for all θ.
Equation (1) means that the frequentist coverage probabilityis 1 − 2α, i.e. in repeated hypothetical samples from thesame AR(1) the p.i.’s contain the future values with probability1 − 2α on the average.
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Standard p.i.’s conditionally: one step ahead
Pθ(L(y , θ) ≤ yn+k ≤ U(y , θ) | y)
Coverage probability
Den
sity
0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
02
46
8
50000 replicates from AR(1) with β1 = 0.8, n = 30,1 − 2α = 0.9, mean = 0.871.
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Ordinary linear regression
Linear regression
yt = x ′tβ + εt , x t fixed, t = 1, . . . , n.
Let xn+1 known. The usual prediction interval for yn+1
x ′n+1β ± s
√1 + x ′
n+1(X′X )−1xn+1 tα;n−p−1, (2)
where X , n × (p + 1), has rows x ′t .
This interval satisfies
Eθ
[P(L(y , θ) ≤ yn+1 ≤ U(y , θ) | y)
]= 1 − 2α.
The frequentist coverage probability is exact!
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Autoregression
Autoregression
yt = β0 + β1yt−1 + · · ·+ βpyt−p + εt
= x ′tβ + εt , x ′
t = (1, yt−1, . . . , yt−p), t = 1, . . . , n.
Least squares estimation conditionally on (y0, . . . , y−p+1) andthe prediction interval for yn+1 by analogy with OLS leads to
x ′n+1β ± s
√1 + x ′
n+1(X′X )−1xn+1 tα;n−p−1.
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
AR(1): One step ahead
It works well!
−0.5 0.0 0.5
0.85
0.86
0.87
0.88
0.89
0.90
0.91
β1
Cov
erag
e pr
obab
ility
−0.9 −0.5 0.5 0.9
yt = β0 + β1yt−1 + εt , εt ∼ N(0, σ2), t = 1, . . . , 30.Upper = Regression formula, Lower = Standard formula.
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
What about AR(2) models?
Table: The models used in the simulation experiments.
r−11 r−1
2 β1 β2
0.9 0.5 1.4 −0.450.9 −0.5 0.4 0.45
−0.9 0.5 −0.4 0.45−0.9 −0.5 −1.4 −0.45
0.5 0.5 1.0 −0.250.5 −0.5 0 0.25
0.9 exp( i5) 0.9 exp(− i
5) 1.76 −0.810.9 exp( iπ
2 ) 0.9 exp(− iπ2 ) 0 −0.81
0.9 exp( i3π4 ) 0.9 exp(− i3π
4 ) −1.27 −0.81
The values r1, r2 satisfy 1 − β1r − β2r2 = 0J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
AR(2): One step ahead
It works well also here!
2 4 6 8
0.85
0.86
0.87
0.88
0.89
0.90
0.91
Models
Cov
erag
e pr
obab
ility
yt = β0 + β1yt−1 + β2yt−2 + εt , εt ∼ N(0, σ2), t = 1, . . . , 30.Upper = Regression formula, Lower = Standard formula.
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Regression approach seems to solve one step aheadprediction problem. But what to do for 2 steps, 3 steps and soon prediction intervals?
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Bayesian interpretation
Back to linear regression
x ′n+1β ± s
√1 + x ′
n+1(X′X )−1xn+1 tα;n−p−1.
Let us adopt the improper (diffuse) prior p(β, σ) = 1/σ. Then aposteriori
P(L(y , θ) ≤ yn+1 ≤ U(y , θ) | y) = 1 − 2α.
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Likelihood, prior and posterior
Let X be as in autoregression, and y−p+1, . . . , y0 fixed. Thenthe likelihood is
p(y |β, σ) = (2π)−n2σ−(n−p−1) exp
(−(n − p − 1)s2
2σ2
)
×σ−p−1 exp(−
12σ2 (β − β)′(X ′X )(β − β)
).
Assume a priori p(β, σ) = 1/σ. Then the posterior distributionsare as in ordinary linear regression.
p(β, σ | y) ∝1σ
p(y |β, σ),
(n − p − 1)s2/σ2 | y ∼ χ2(n − p − 1),
β | y , σ ∼ N(β, σ2(X ′X )−1).
J. Helske and J. Nyblom Improved prediction intervals
Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Prediction intervals
Bayesian approach opens up a method to find p.i.’s for all k .
Start with the predictive density, i.e. conditional density
p(yn+k | y) =∫
p(yn+k | y ,β, σ) p(β, σ | y) dβ dσ.
The conditional distribution function is
F (a) =∫ a
−∞p(yn+k | y) dyn+k .
The p.i. is (alow, aup) with
α = F (alow)
1 − α = F (aup)
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Here
F (a) =∫
Φ
(a − yk |n(β)
σvk |n(β)
)p(β, σ | y) dβ dσ,
where Φ in the c.d.f. of N(0, 1), and
yk |n(β) = E(yn+k |β, σ, y),
σ2vk |n(β)2 = Var (yn+k |β, σ, y).
Integral may be interpreted as a weighted average around(β, σ).Plug-in method puts a unit mass on (β, σ).
J. Helske and J. Nyblom Improved prediction intervals
Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
One step ahead
When k = 1 then
yn+1 − y1|n(β)
s√
1 + x ′n+1(X
′X )−1xn+1
∣∣∣∣∣∣y ∼ t(n − p − 1),
andx ′
n+1β ± s√
1 + x ′n+1(X
′X )−1xn+1 tα;n−p−1.
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
k steps ahead
When k > 1 we use simulation
Generate q1, . . . , qN independently from χ2(n − p − 1), andlet σ2
i = (n − p − 1)s2/qi .
Generate βi from N(β, σ2i (X
′X )−1) independentlyi = 1, . . . ,N.
Then
F (a) ≈1N
N∑
i=1
Φ
(a − yk |n(βi)
σivk |n(βi)
)
J. Helske and J. Nyblom Improved prediction intervals
Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
General prior
If an arbitrary prior p(β, σ)/σ with conditional likeloihood (firsty−p+1, . . . , y0 fixed), then
generate q1, . . . , qN independently from χ2(n − p − 1), andlet σ2
i = (n − p − 1)s2/qi .
generate βi from N(β, σ2i (X
′X )−1) independentlyi = 1, . . . ,N.Then by importance sampling
F (a) ≈
∑Ni=1 wiΦ
(a−yk|n(βi )
σi vk|n(βi )
)
∑Ni=1 wi
wi = p(βi , σi).
If we sample from the true posterior (e.g. by MCMC as inChib & Greenberg, 1994) we use the ordinary average forF (a).
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
The first values revisited
Let ps(y0 |β, σ) be the stationary density of(y−p+1, . . . , y0)
′ = y0, then combining the prior with the exactlikelihood leads to the weights
wi = ps(y0 |βi , σi)p(βi , σi).
The benefit of the inportance sampling is a fairly simple formulafor the Monte Carlo error.
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Examples of priors for AR(1)
p(β, σ)σ
=1σ, uniform,
=I(|β1| < 1)
σ, uniform stationary,
=I(|β1| < 1)
πσ√
1 − β21
, Jeffreys,
=I(|β1| < 1)
2πσ√
1 − β21
+I(|β1| > 1)
2πσ|β1|√β2
1 − 1, reference.
The reference prior is due to Berger and Yang (1994).
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Our goal is to find priors that produce p.i.’s havingapproximately correct frequentist coverage probabilites.
Probability matching priors:Datta and Mukerjee (2003, 2004), AISM, monograph
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Multistep predictions
2 4 6 8 10
0.60
0.70
0.80
0.90
β1 = − 0.5
2 4 6 8 10
0.60
0.70
0.80
0.90
β1 = 0.5
2 4 6 8 10
0.60
0.70
0.80
0.90
β1 = 0.7
2 4 6 8 100.
600.
700.
800.
90
β1 = 0.9
Cov
erag
e pr
obab
ility
Lead
Figure: Coverage probabilities, AR(1), n = 30, 1 − 2α = 0.9. Dashed blackline = refrence, dotted line = standard, uniform = solid grey, Jeffreys = greydashed, and uniform stationary = black dot-and-dash.
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
2 4 6 8 100.
600.
750.
90
r1−1 = 0.9, r2
−1 = 0.5
2 4 6 8 10
0.60
0.75
0.90
r1−1 = 0.9, r2
−1 = − 0.5
2 4 6 8 10
0.60
0.75
0.90
r1−1 = − 0.9, r2
−1 = 0.5
2 4 6 8 10
0.60
0.75
0.90
r1−1 = − 0.9, r2
−1 = − 0.5
2 4 6 8 10
0.60
0.75
0.90
r1−1 = 0.5, r2
−1 = 0.5
2 4 6 8 10
0.60
0.75
0.90
r1−1 = 0.5, r2
−1 = − 0.5
2 4 6 8 10
0.60
0.75
0.90
r1, 2−1 = 0.9exp( ± i0.2)
2 4 6 8 10
0.60
0.75
0.90
r1, 2−1 = 0.9exp( ± iπ 2)
2 4 6 8 10
0.60
0.75
0.90
r1, 2−1 = 0.9exp( ± i3π 4)
Cov
erag
e pr
obab
ility
Lead
Figure: The coverage probabilities of AR(2)-processes with n = 30,1 − 2α = 0.9 and roots r1, r2. Black dotted = standard, solid grey = uniform,grey dashed = Jeffreys, and dotted-and-dashed = uniform stationary prior.
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
0.0 0.5 1.0 1.5 2.0 2.5 3.0
02
46
r1−1 = 0.9, r2
−1 = 0.5
0.0 0.5 1.0 1.5 2.0 2.5 3.0
02
46
r1−1 = 0.9, r2
−1 = − 0.5
0.0 0.5 1.0 1.5 2.0 2.5 3.0
02
46
r1−1 = − 0.9, r2
−1 = 0.5
0.0 0.5 1.0 1.5 2.0 2.5 3.0
02
46
r1−1 = − 0.9, r2
−1 = − 0.5
0.0 0.5 1.0 1.5 2.0 2.5 3.0
02
46
r1−1 = 0.5, r2
−1 = 0.5
0.0 0.5 1.0 1.5 2.0 2.5 3.0
02
46
r1−1 = 0.5, r2
−1 = − 0.5
0.0 0.5 1.0 1.5 2.0 2.5 3.0
02
46
r1, 2−1 = 0.9exp( ± i0.2)
0.0 0.5 1.0 1.5 2.0 2.5 3.0
02
46
r1, 2−1 = 0.9exp( ± iπ 2)
0.0 0.5 1.0 1.5 2.0 2.5 3.0
02
46
r1, 2−1 = 0.9exp( ± i3π 4)
Frequency
Val
ue
Figure: The scaled spectral density functions of the nine AR(2)-processesfrom Table 1.
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
0 5 10 15
−1.
00.
01.
0
r1−1 = 0.9, r2
−1 = 0.5
0 5 10 15
−1.
00.
01.
0
r1−1 = 0.9, r2
−1 = − 0.5
0 5 10 15
−1.
00.
01.
0
r1−1 = − 0.9, r2
−1 = 0.5
0 5 10 15
−1.
00.
01.
0
r1−1 = − 0.9, r2
−1 = − 0.5
0 5 10 15
−1.
00.
01.
0
r1−1 = 0.5, r2
−1 = 0.5
0 5 10 15
−1.
00.
01.
0
r1−1 = 0.5, r2
−1 = − 0.5
0 5 10 15
−1.
00.
01.
0
r1, 2−1 = 0.9exp( ± i0.2)
0 5 10 15
−1.
00.
01.
0
r1, 2−1 = 0.9exp( ± iπ 2)
0 5 10 15
−1.
00.
01.
0
r1, 2−1 = 0.9exp( ± i3π 4)
AC
F
Lag
Figure: The autocorrelation functions of the nine AR(2)-processes.
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
2 4 6 8 10
0.70
0.80
0.90
1.00
r1−1 = 0.9, r2
−1 = 0.5
2 4 6 8 10
0.70
0.80
0.90
1.00
r1−1 = 0.9, r2
−1 = − 0.5
2 4 6 8 10
0.70
0.80
0.90
1.00
0.9exp( ± i0.2)
Cove
rage
pro
babil
ities
Lead
Figure: Coverage probabilities for 3 AR(2) processes, n = 50, 1 − 2α = 0.9.Dashed black line = refrence and the bottom dotted line = standard, uniform =solid dark grey, Jeffreys = light grey dashed, and uniform stationary = blackdot-and-dash.
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Annual consumer price inflation in the United Kingdom (UK)and United States (US).http://data.worldbank.org/indicator/fp.cpi.totl.zg.
Based on autocorrelations and partial autocorrelations weassumeAR(1) model for the UK series,AR(3) model for the US series.
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Model fit 1961–1999. Forecast period 2000-2009.
β0 β1 β2 β3 σ r−11 r−1
2,3UK 1.40 0.80 3.29 0.80US 0.92 1.32 -0.90 0.40 1.54 0.82 0.7 exp(±i1.21)
J. Helske and J. Nyblom Improved prediction intervals
Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
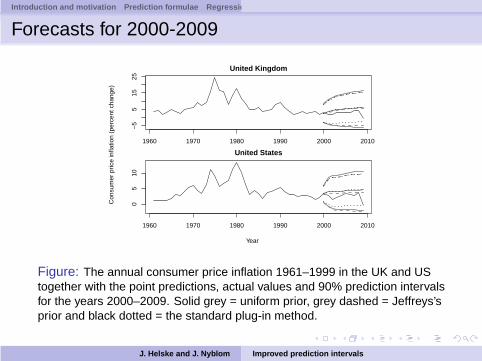
Forecasts for 2000-2009
United Kingdom
1960 1970 1980 1990 2000 2010−
55
1525
United States
1960 1970 1980 1990 2000 2010
05
10
Con
sum
er p
rice
infla
tion
(per
cent
cha
nge)
Year
Figure: The annual consumer price inflation 1961–1999 in the UK and UStogether with the point predictions, actual values and 90% prediction intervalsfor the years 2000–2009. Solid grey = uniform prior, grey dashed = Jeffreys’sprior and black dotted = the standard plug-in method.
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Model fit 1961–2009. Forecast period 2010-2014.
β0 β1 β2 β3 σ r−11 r−1
2,3UK 1.03 0.82 – – 3.02 0.82 –US 0.65 1.27 -0.82 0.39 1.58 0.82 0.68 exp(±i1.25)
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Forecasts for 2010–2014
United Kingdom
1995 2000 2005 2010
−5
05
10
United States
1995 2000 2005 2010
−4
04
Con
sum
er p
rice
infla
tion
(per
cent
cha
nge)
Year
Figure: The annual consumer price inflation 1995–2009 and its predictionswith prediction intervals 2010–2014. The colors dark to light represent the50%, 75% and 90% intervals with Jeffreys’s prior.
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Predictive densities
−10 −5 0 5 10
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
Inflation
Den
sity
Figure: Predictive densities of the US inflation for 2014 (5 steps ahead).Black = Standard, Blue = uniform prior, Red = Jeffreys’s prior.
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Table: Coverage probability checks and prediction limits with standarderrors, for the UK and US consumer price inflation series 1961-1999.
Bayes with uniform prior Bayes with Jeffreys’s priork = 1 k = 5 k = 10 k = 1 k = 5 k = 10
United KingdomCoverage 0.898 0.869 0.867 0.897 0.871 0.869b1−α 8.343 14.270 16.449 8.165 13.670 15.469s.e.(b1−α) – 0.008 0.013 0.003 0.006 0.009bα -3.068 -5.335 -6.113 -3.032 -4.913 -5.180s.e.(bα) – 0.017 0.031 0.003 0.011 0.017
United StatesCoverage 0.899 0.891 0.898 0.897 0.893 0.900b1−α 6.035 9.495 10.623 5.745 8.828 9.663s.e.(b1−α) – 0.006 0.008 0.002 0.006 0.007bα 0.649 -1.636 -2.028 0.550 -2.042 -2.457s.e.(bα) – 0.008 0.014 0.002 0.007 0.010
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Spectral densities
0.0 0.5 1.0 1.5 2.0 2.5 3.0
0.0
0.5
1.0
1.5
2.0
2.5
Frequency
Val
ue
Figure: Spectral densities for the fitted models; Black = UK, Blue = US.
J. Helske and J. Nyblom Improved prediction intervals
Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
References close to our approach:
Zellner (1971), monographBroemeling and Land (1984), Comm. in Stat.Thompson and Miller (1986), JBESLiu (1994), AISMSnyder, Ord, Koehler (2001), JBES
J. Helske and J. Nyblom Improved prediction intervals
Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Our method:
Almost exact for 1 step ahead predictions.
Easy to implement and to understand.
Computationally fast.
Simple expression for simulation error.
Easy to check the performance of the fitted model.
Performance worse when– long forecast horizons– major spectral mass on low frequences.
J. Helske and J. Nyblom Improved prediction intervals
Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
References
Ansley, C. F. and Kohn, R., (1986). Prediction Mean SquaredError for State Space Models With Estimated Parameters,Biometrika, 73, 467–473.
Barndorff-Nielsen, O. E. and Cox, D. R. (1996). Prediction andAsymptotics, Bernoulli, 2, 319–340.
Beran, R. (1990). Calibrating Prediction Regions, Journal of theAmerican Statistical Association, 85, 715–723.
Berger, J. O. and Yang, R. (1994). Noninformative Priors andBayesian Testing for the AR(1) Model, Econometric Theory,10, 461–482.
Berger, J. (2006). The Case of Objective Bayesian Analysis,Bayesian Analysis, 1, 385–402.
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Box, G. E. P. and Jenkins, G. M. and Reinsel, G. C. (2008).Time Series Analysis: Forecasting and Control, New York:Wiley.
Broemeling, L. and Land, M. (1984). On Forecasting WithUnivariate Autoregressive Processes: A BayesianApproach, Communications in Statistics — Theory andMethods, 13, 1305–1320.
Chow, G.C. (1975). Multiperiod predictions from stochasticdifference equations by Bayesian methods, Econometrica,41, 109–118.
Chatfield, C. (1993). Calculating Interval Forecasts, Journal ofBusiness & Economic Statistics, 11, 121–135.
Chatfield, C. (1996). Model Uncertainty and Forecast Accuracy,Journal of Forecasting, 15, 495–508.
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Chib, S. and Greenberg, E. (1994). Bayes inference inregression models with ARMA(p, q) errors. Journal ofEconometrics, 64, 183–206.
Clements, M. P. and Kim, J. H. (2007). Bootstrap PredictionIntervals for Autoregressive Time Series, ComputationalStatistics & Data Analysis, 51, 3580–3594.
Fuller, W. A and Hasza, D. (1981). Properties of Predictors forAutoregressive Time Series, Journal of the AmericanStatistical Association, 76, 155–161.
Datta, G. and Mukerjee, R. (2003). Probability Matching Priorsfor Predicting a Dependent Variable With Application toRegression Models, Annals of the Institute of StatisticalMathematics, 55, 1–6.
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Datta, G. and Mukerjee, R. (2004). Probability Matching Priors:Higher Order Asymptotics, New York: Springer.
Ghosh, M. and Heo, J. (2003). Default Bayesian Priors forRegression Models With First-Order AutoregressiveResiduals, Journal of Time Series Analysis, 24, 269–282.
Grigoletto, M. (1998). Bootstrap Prediction Intervals forAutoregressions: Some Alternatives, International Journalof Forecasting, 14, 447–456.
Kabaila, P. and Syuhada, K. (2008). Improved Prediction Limitsfor AR(p) and ARCH(p) processes, Journal of Time SeriesAnalysis, 29, 213–223.
Kim, J. H. (2004). Bootstrap Prediction Intervals forAutoregression Using Asymptotically Mean-UnbiasedEstimators, International Journal of Forecasting, 20, 85–97.
J. Helske and J. Nyblom Improved prediction intervals
Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Liu, S. I. (1994). Multiperiod Bayesian Forecasts for ARModels, Annals of the Institute of Statistical Mathematics,46, 429–452.
Masarotto, G. (1990). Bootstrap Prediction Intervals forAutoregressions, International Journal of Forecasting, 6,229–239.
Pascual, L. and Romo, J. and Ruiz, E. (2004). BootstrapPredictive Inference for ARIMA Processes, Journal of TimeSeries Analysis, 25, 449–465.
Phillips, P. C. B. (1979). The Sampling Distribution of ForecastsFrom a First-Order Autoregression, Journal ofEconometrics, 9, 241–261.
Pfeffermann, D. and Tiller, R. (2005). Bootstrap Approximationto Prediction MSE for State-Space Models With EstimatedParameters, Journal of Time Series Analysis, 26, 893–916.
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Quenneville, B. and Singh, A. C. (2000). Bayesian PredictionMean Squared Error for State Space Models WithEstimated Parameters, Journal of Time Series Analysis,21, 219–236.
Rodriguez, A. and Ruiz, E. (2009). Bootstrap PredictionIntervals in State-Space Models, Journal of Time SeriesAnalysis, 30, 167–178.
Snyder, R. D. and Ord, J. K. and Koehler, A. B. (2001).Prediction Intervals for ARIMA Models, Journal of Business& Economic Statistics, 19, 217–225.
Thompson, P. A. and Miller, R. B. (1986). Sampling the Future:A Bayesian Approach to Forecasting to Univariate TimeSeries Models, Journal of Business & Economic Statistics,4, 427–436.
J. Helske and J. Nyblom Improved prediction intervals

Introduction and motivation Prediction formulae Regression and autoregression Bayesian prediction Generalization Sim
Vidoni, P. (2004). Improved Prediction Intervals for StochasticProcess Models, Journal of Time Series Analysis, 25,137–154.
Vidoni, P. (2009). A Simple Procedure for Computing ImprovedPrediction Intervals for Autoregressive Models, Journal ofTime Series Analysis, 30, 577–590.
Zellner, A. (1971). An Introduction to Bayesian Inference inEconometrics, New York: Wiley.
J. Helske and J. Nyblom Improved prediction intervals