industrial ethernet journal 01/2014 - download.beckhoff.com · industrial ethernet journal i/2014...
TRANSCRIPT

EthernetProduktneuheiten zu Ethernetin der Antriebstechnik
ZugriffssicherheitDie Sicht eines Managed Security Service Providers
ÜbersichtenMarktübersicht: Serielle Adapter für EthernetProduktübersicht: Wireless-Produkte
I/2014 www.sps-magazin.de
QR-Code: Scannen Sie den QR-Code mit
Ihrem Smart phone, um direkt auf die
Homepage von Beckhoff zu gelangen.
IndustrialEthernet JournalETHERNET • WIRELESS • SECURITY
Securityinside
Flexible Netzwerkarchitekturen mit Ethercat (S.6)
Sonderausgabe

Titelstory
Industrial Ethernet Journal I/20146
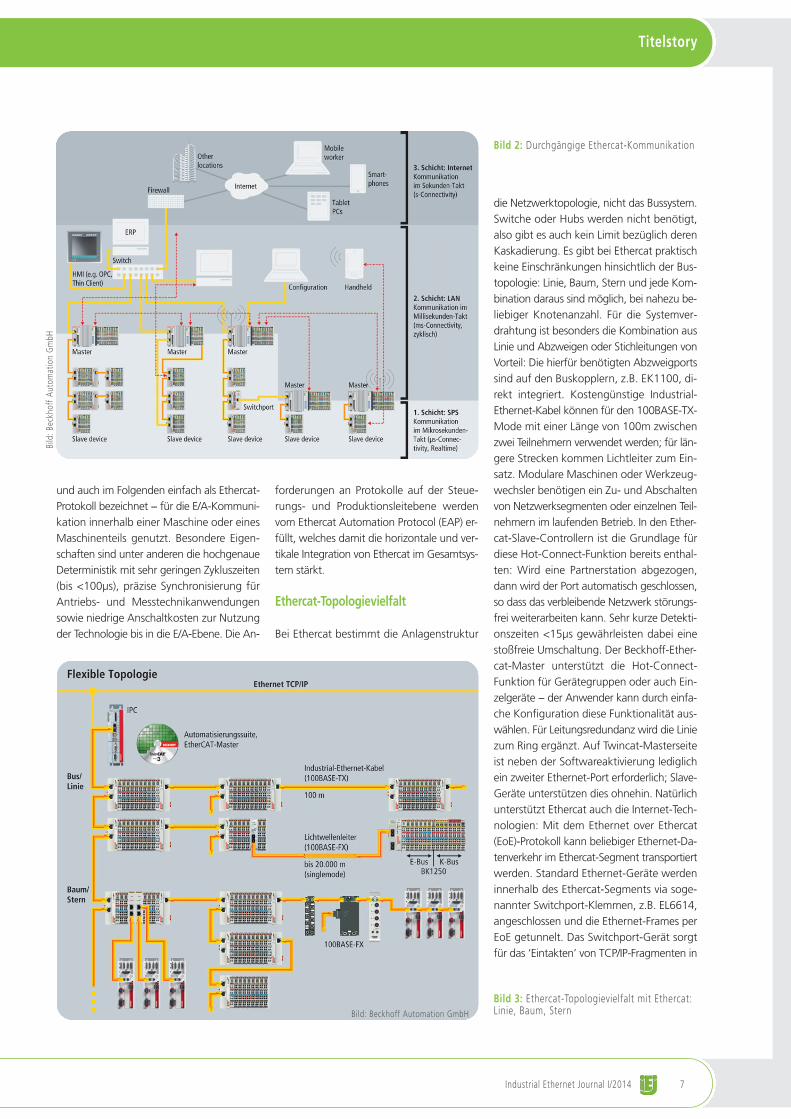
Bild 1: Kommunikationsebenen in derAutomatisierungstechnik
Flexible Netzwerkarchitekturen mit EthercatZur Steuerung und Verwaltung vonProduktionsaufträgen werden in denAnlagen Systeme aus unterschiedli-chen Fachgebieten zusammenge-schlossen. Dies erfordert Kommuni-kationssysteme, die für die diversitä-ren Anforderungen von der Sensor-/Aktor-Kommunikation bis hinaufzur Produktionsleitebene geeignetsind. Beckhoff setzt hierfür in seinemSteuerungssystem auf offene Techno-logien: Ethercat für die Feld- undProzessleitebene und OPC UA zurvertikalen Anbindung. Die Anforde-rungen eines durchgängigen Infor-mationsaustauschs vom Sensor bis indie Managementebene und weiterbis in die Cloud, wie sie heute bei-spielsweise in den Arbeitskreisen derIndustrie-4.0-Verbände diskutiertwerden, erfüllt Beckhoff daher be-reits seit vielen Jahren.
Innerhalb von Maschinen(-modulen) stehtder Austausch von E/A-Daten für Sensorenund Aktoren einschließlich Antrieben im
Fokus; es werden in der Regel harte Echtzei-tanforderungen, Synchronisierung sowiekurze Zykluszeiten benötigt, um die Applika-tion präzise und möglichst schnell umsetzenzu können. Die horizontale Kommunikationzwischen Maschinen und Produktionsaggre-gaten unterliegt ebenfalls Echtzeit-Bedingun-gen − die Zykluszeiten können von ca.100ms bis weit darunter liegen, wenn z.B. imTakt zur Produktion kommuniziert werdensoll. Die vertikale Kommunikation dient derAnkopplung eines Produktionsaggregatsoder einer -linie an ein übergeordnetes Ma-nagementsystem, etwa zur Produktions-steuerung (ERP). Zeitliche Anforderungensind hier sehr viel weicher und liegen im Be-reich einiger Sekunden bis Millisekunden. Al-lerdings müssen eine Reihe weiterer Aspekteauf dieser Ebene beachtet werden: so z.B.Security, Authentifizierung, Alarming, Tren-ding, historische Daten, dienstbasierendeKommunikation etc. Das Protokoll OPC-UAder herstellerübergreifenden OPC Foundationhat sich über die Jahre zu einer breit akzep-tierten Protokollfamilie entwickelt, soweit
keine harten Echtzeitanforderungen beste-hen. Insofern kann das Protokoll OPC-UA inVerbindung mit bestehenden modernenFeldbussystemen als vielseitiges Bindegliedzwischen der MES-Ebene in Unternehmenund der Produktion Verwendung finden.Beckhoff hat die Relevanz von OPC-UA früh-zeitig erkannt und auf der ersten Developer-Konferenz im Jahr 2006 eine Steuerung alsOPC-UA-Prototypen gezeigt und sammeltmit dieser Technologie bereits seit 2008 Er-fahrung im Feld. Jede Beckhoff-Steuerungkann heute mit einer OPC-Server- und auch-Client-Funktionalität ausgestattet werden.Müssen jedoch harte Echtzeitanforderungenerfüllt werden, eignet sich besonders das of-fene Ethercat-Protokoll, das im Jahr 2003 vondem Unternehmen Beckhoff vorgestelltwurde und das seitdem von der EthercatTechnology Group (ETG) gepflegt wird. DasProduktspektrum umfasst bei Beckhoff heutemehr als 250 verschiedene Geräte mit Ether-cat-Schnittstelle; nicht gezählt sind dabei allePC-basierten Steuerungen mit einem Ether-net-Port, die durch die Automatisierungssoft-ware Twincat als Ethercat-Master eingesetztwerden können. Auf der Feldebene wird dasbekannte Ethercat Device Protocol − häufig
Bild
: Bec
khof
f Aut
omat
ion
GmbH
Halle 9Stand F06
Industrial Ethernet Journal I/2014
Titelstory
7
und auch im Folgenden einfach als Ethercat-Protokoll bezeichnet − für die E/A-Kommuni-kation innerhalb einer Maschine oder einesMaschinenteils genutzt. Besondere Eigen-schaften sind unter anderen die hochgenaueDeterministik mit sehr geringen Zykluszeiten(bis <100μs), präzise Synchronisierung fürAntriebs- und Messtechnikanwendungensowie niedrige Anschaltkosten zur Nutzungder Technologie bis in die E/A-Ebene. Die An-
forderungen an Protokolle auf der Steue-rungs- und Produktionsleitebene werdenvom Ethercat Automation Protocol (EAP) er-füllt, welches damit die horizontale und ver-tikale Integration von Ethercat im Gesamtsys-tem stärkt.
Ethercat-Topologievielfalt
Bei Ethercat bestimmt die Anlagenstruktur
die Netzwerktopologie, nicht das Bussystem.Switche oder Hubs werden nicht benötigt,also gibt es auch kein Limit bezüglich derenKaskadierung. Es gibt bei Ethercat praktischkeine Einschränkungen hinsichtlich der Bus-topologie: Linie, Baum, Stern und jede Kom-bination daraus sind möglich, bei nahezu be-liebiger Knotenanzahl. Für die Systemver-drahtung ist besonders die Kombination ausLinie und Abzweigen oder Stichleitungen vonVorteil: Die hierfür benötigten Abzweigportssind auf den Buskopplern, z.B. EK1100, di-rekt integriert. Kostengünstige Industrial-Ethernet-Kabel können für den 100BASE-TX-Mode mit einer Länge von 100m zwischenzwei Teilnehmern verwendet werden; für län-gere Strecken kommen Lichtleiter zum Ein-satz. Modulare Maschinen oder Werkzeug-wechsler benötigen ein Zu- und Abschaltenvon Netzwerksegmenten oder einzelnen Teil-nehmern im laufenden Betrieb. In den Ether-cat-Slave-Controllern ist die Grundlage fürdiese Hot-Connect-Funktion bereits enthal-ten: Wird eine Partnerstation abgezogen,dann wird der Port automatisch geschlossen,so dass das verbleibende Netzwerk störungs-frei weiterarbeiten kann. Sehr kurze Detekti-onszeiten <15μs gewährleisten dabei einestoßfreie Umschaltung. Der Beckhoff-Ether-cat-Master unterstützt die Hot-Connect-Funktion für Gerätegruppen oder auch Ein-zelgeräte − der Anwender kann durch einfa-che Konfiguration diese Funktionalität aus-wählen. Für Leitungsredundanz wird die Liniezum Ring ergänzt. Auf Twincat-Masterseiteist neben der Softwareaktivierung lediglichein zweiter Ethernet-Port erforderlich; Slave-Geräte unterstützen dies ohnehin. Natürlichunterstützt Ethercat auch die Internet-Tech-nologien: Mit dem Ethernet over Ethercat(EoE)-Protokoll kann beliebiger Ethernet-Da-tenverkehr im Ethercat-Segment transportiertwerden. Standard Ethernet-Geräte werdeninnerhalb des Ethercat-Segments via soge-nannter Switchport-Klemmen, z.B. EL6614,angeschlossen und die Ethernet-Frames perEoE getunnelt. Das Switchport-Gerät sorgtfür das ‘Eintakten’ von TCP/IP-Fragmenten in
Bild
: Bec
khof
f Aut
omat
ion
Gm
bH
Bild 2: Durchgängige Ethercat-Kommunikation
Bild: Beckhoff Automation GmbH
Bild 3: Ethercat-Topologievielfalt mit Ethercat:Linie, Baum, Stern
Bild
: Bec
khof
f Aut
omat
ion
Gm
bH
Bild 5: Schnittstellenkonfiguration im TwincatSystem Manager
Titelstory
Industrial Ethernet Journal I/20148
den Ethercat-Verkehr und vermeidet da-durch, dass die Echtzeit im Netzwerk beein-flusst wird. Twincat als Ethercat-Master fun-giert als Layer-2-Switch, der die Framesgemäß der MAC-Adressinformation zu denentsprechenden Teilnehmern per EoE weiter-leitet. Damit können sämtliche Internet-Tech-nologien auch im Ethercat-Umfeld zum Ein-satz kommen: integrierte Webserver, E-Mail,FTP-Transfer etc.
Integration anderer Bussysteme
Flexibilität in der Netzwerkarchitektur bestehtbei Ethercat auch nach unten in die E/A-Ebene. Durch die zur Verfügung stehendeBandbreite ist es möglich, klassische Feldbus -anschaltungen in einem Ethercat-Gatewayals unterlagertes System zu nutzen. Hilfreichist das beispielsweise bei der Migration voneinem klassischen Feldbus hin zu Ethercat.Die schrittweise Umsetzung einer Anlage aufEthercat sowie die Einbindung von Automa-tisierungskomponenten, die (noch) keineEthercat-Schnittstelle unterstützen, ist somitmöglich. Die Kompakt-Industrie-PC- undEmbedded-PC-Lösungen von Beckhoff ba-
sieren auf dieser Integration, da der Platz fürErweiterungskarten nicht mehr bereitgestelltwerden muss: Über einen einzigen Ethernet-Port im PC können neben den dezentralenE/As, Achsen und Bediengeräten auch kom-plexe Systeme wie Feldbus-Master/-Slaves(Gateways), schnelle serielle Schnittstellenund andere Kommunikations-Interfaces an-gesprochen werden. Die Daten des einge-bundenen Feldbusses stehen dem Master imProzessdatenabbild direkt zur Verfügung.
Anlagenweite Kommunikation mit demEthercat Automation Protocol
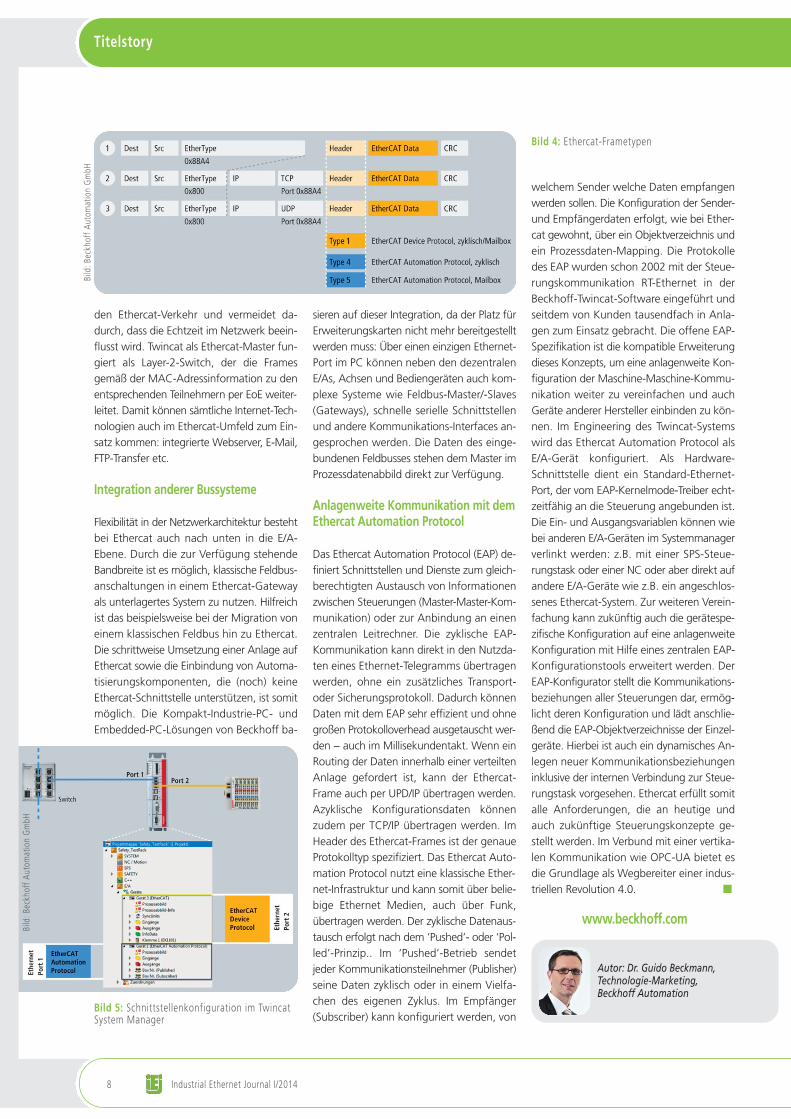
Das Ethercat Automation Protocol (EAP) de-finiert Schnittstellen und Dienste zum gleich-berechtigten Austausch von Informationenzwischen Steuerungen (Master-Master-Kom-munikation) oder zur Anbindung an einenzentralen Leitrechner. Die zyklische EAP-Kommunikation kann direkt in den Nutzda-ten eines Ethernet-Telegramms übertragenwerden, ohne ein zusätzliches Transport-oder Sicherungsprotokoll. Dadurch könnenDaten mit dem EAP sehr effizient und ohnegroßen Protokolloverhead ausgetauscht wer-den − auch im Millisekundentakt. Wenn einRouting der Daten innerhalb einer verteiltenAnlage gefordert ist, kann der Ethercat-Frame auch per UPD/IP übertragen werden.Azyklische Konfigurationsdaten könnenzudem per TCP/IP übertragen werden. ImHeader des Ethercat-Frames ist der genaueProtokolltyp spezifiziert. Das Ethercat Auto-mation Protocol nutzt eine klassische Ether-net-Infrastruktur und kann somit über belie-bige Ethernet Medien, auch über Funk,übertragen werden. Der zyklische Datenaus-tausch erfolgt nach dem ‘Pushed’- oder ‘Pol-led’-Prinzip.. Im ‘Pushed’-Betrieb sendetjeder Kommunikationsteilnehmer (Publisher)seine Daten zyklisch oder in einem Vielfa-chen des eigenen Zyklus. Im Empfänger(Subscriber) kann konfiguriert werden, von
welchem Sender welche Daten empfangenwerden sollen. Die Konfiguration der Sender-und Empfängerdaten erfolgt, wie bei Ether-cat gewohnt, über ein Objektverzeichnis undein Prozessdaten-Mapping. Die Protokolledes EAP wurden schon 2002 mit der Steue-rungskommunikation RT-Ethernet in derBeckhoff-Twincat-Software eingeführt undseitdem von Kunden tausendfach in Anla-gen zum Einsatz gebracht. Die offene EAP-Spezifikation ist die kompatible Erweiterungdieses Konzepts, um eine anlagenweite Kon-figuration der Maschine-Maschine-Kommu-nikation weiter zu vereinfachen und auchGeräte anderer Hersteller einbinden zu kön-nen. Im Engineering des Twincat-Systemswird das Ethercat Automation Protocol alsE/A-Gerät konfiguriert. Als Hardware-Schnittstelle dient ein Standard-Ethernet-Port, der vom EAP-Kernelmode-Treiber echt-zeitfähig an die Steuerung angebunden ist.Die Ein- und Ausgangsvariablen können wiebei anderen E/A-Geräten im Systemmanagerverlinkt werden: z.B. mit einer SPS-Steue-rungstask oder einer NC oder aber direkt aufandere E/A-Geräte wie z.B. ein angeschlos-senes Ethercat-System. Zur weiteren Verein-fachung kann zukünftig auch die gerätespe-zifische Konfiguration auf eine anlagenweiteKonfiguration mit Hilfe eines zentralen EAP-Konfigurationstools erweitert werden. DerEAP-Konfigurator stellt die Kommunikations-beziehungen aller Steuerungen dar, ermög-licht deren Konfiguration und lädt anschlie-ßend die EAP-Objektverzeichnisse der Einzel-geräte. Hierbei ist auch ein dynamisches An-legen neuer Kommunikationsbeziehungeninklusive der internen Verbindung zur Steue-rungstask vorgesehen. Ethercat erfüllt somitalle Anforderungen, die an heutige undauch zukünftige Steuerungskonzepte ge-stellt werden. Im Verbund mit einer vertika-len Kommunikation wie OPC-UA bietet esdie Grundlage als Wegbereiter einer indus-triellen Revolution 4.0. ■
www.beckhoff.com
Bild
: Bec
khof
f Aut
omat
ion
Gm
bH
Bild 4: Ethercat-Frametypen
Autor: Dr. Guido Beckmann,Technologie-Marketing, Beckhoff Automation