informed search (no corresponding text chapter). recall: wanted " an algorithm and associated...
Post on 19-Dec-2015
213 views
TRANSCRIPT
Informed Search
(no corresponding text chapter)

Recall: Wanted
● An algorithm and associated data structure(s) that can:
1) Solve an arbitrary 8-puzzle problem (or problem like it),
2) Do it in a reasonable amount of time and space--efficiency,
3) Be guaranteed to first find the solution with the minimum number of actions--optimality.

Available Algorithms
● Breadth-first state space search (BFS)➢ Pro: optimal➢ Con: memory inefficient
● Depth-first state space search (DFS)➢ Pro: memory efficient➢ Con: non-optimal
● Solution: A* search, a kind of "informed'' search
Informed and Uninformed Search
● If a search algorithm makes an attempt to evaluate an item's children by comparing their "goodness'' with respect to the goal, it is informed.
● If a search algorithm is not informed, it is uninformed or blind.
● BFS and DFS are uninformed● Informed search requires the concept of an
evaluation function
Evaluation Functions
● An evaluation function takes a search space item as an argument and returns a numerical value as its "goodness''
● One type evaluates the strength of a state (as in chess playing programs)--the higher the better
● Another type estimates the number of actions required to get to the goal.
● Such an evaluation function is also called a "heuristic''
● The smaller an item's heuristic, the better

Heuristic for the 8-puzzle
● If n is an item in the 8-puzzle state space, consider:
➢ h(n) = m, where m is the number of tiles out of place● h estimates, but does not overestimate, the
number of actions required to get to the goal g● Note that h(g) = 0
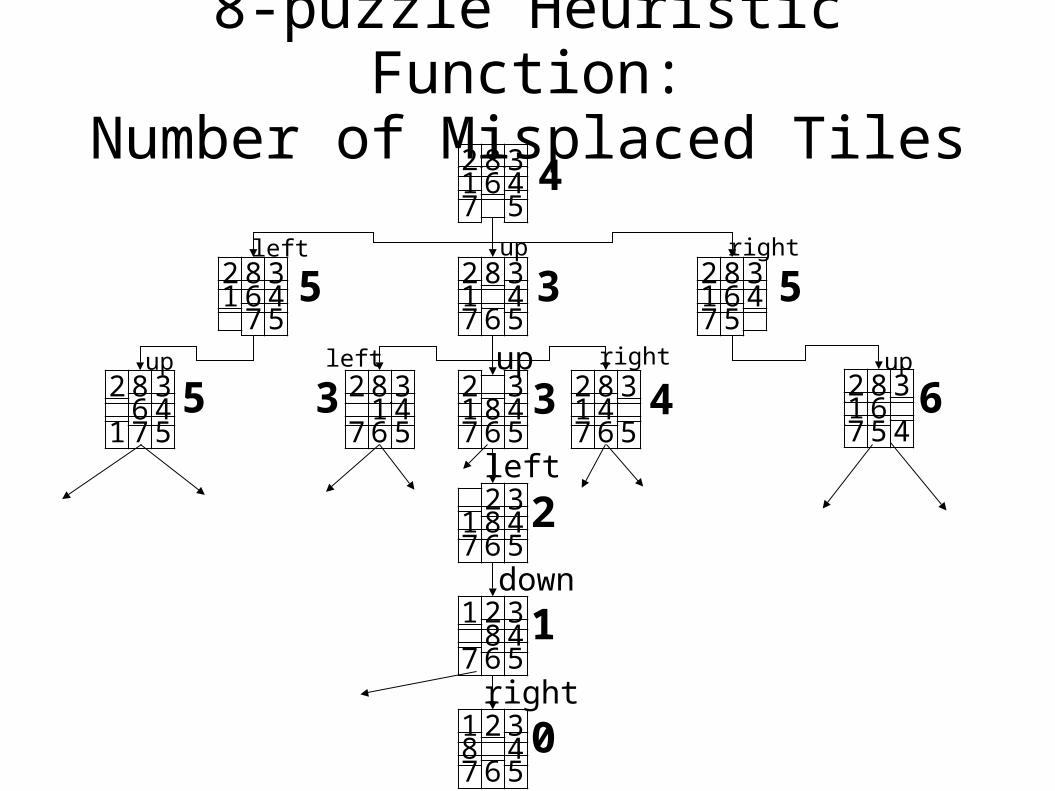
8-puzzle Heuristic Function:Number of Misplaced Tiles
2 8 31 6 47 5
2 8 31 47 6 5
2 31 8 47 6 5
2 31 8 47 6 5
1 2 38 4
7 6 5
1 2 38 47 6 5
up
up
left
down
right
2 8 31 6 4
7 5
2 8 31 6 47 5
left right
2 8 36 4
1 7 5
up2 8 31 67 5 4
up
4
5 3 5
5 3 6
2
1
0
2 8 3 1 47 6 5
left
3 2 8 31 47 6 5
4right

Recall General Search Algorithm
Suppose we added children to the waiting collectionon the basis of their heuristic values.
Q: What kind of collection should be used?
search(root) returns Node or null { waiting.add(root) while (waiting is not empty) { node = waiting.remove() state = node.getState() if (problem.success(state)) return node else { children = expand(node) for each child in children waiting.add(child) } } return null}

Priority Queues
A (regular) queue has first-in, first-out (FIFO) behavior, whereitems must enter at the rear and leave from the front.
In a priority queue items must leave from the front, but theyenter on the basis of a priority (key) value. The queue is keptsorted by this value.
Examples of priority queues:
- CPU process queues - Print queues - Event-driven simulation (traffic flows) - VLSI design (channel routing, pin layout) - Artificial intelligence search algorithms
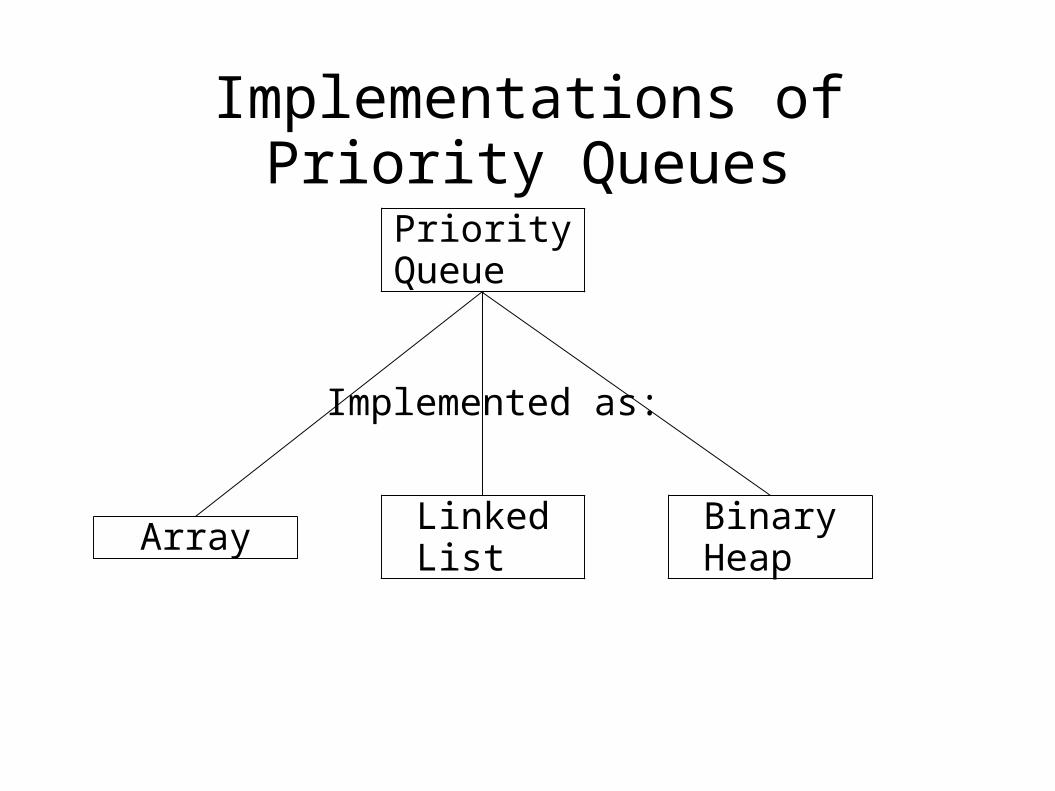
Implementations of Priority Queues
PriorityQueue
Linked ListArray Binary Heap
Implemented as:

Array Implementation of Priority Queues
Suppose items with keys 1, 3, 4, 7, 8, 9, 10, 14, 16 are to be stored in a priority queue.
Array:
1 3 4 7 8 9 10 14 16A1 N Max
Suppose an item with key 2 is added:
1 3 4 7 8 9 10 14 16A1 Max
2 Thus inserting takes O(N) time: linear
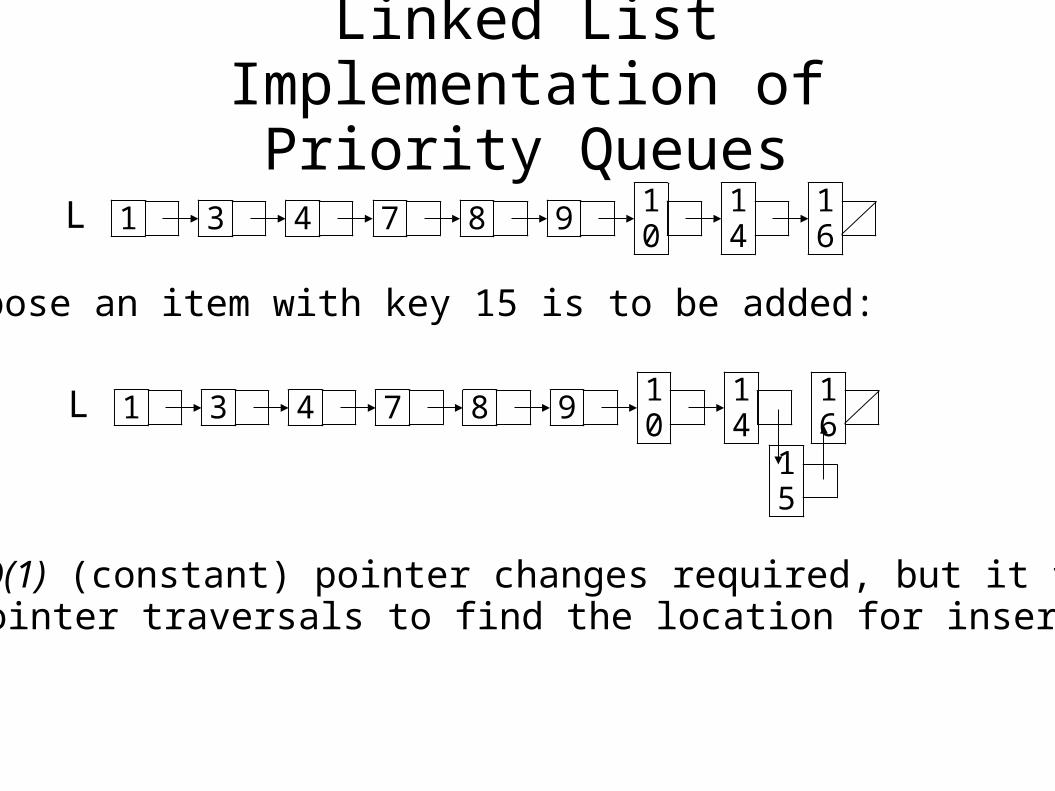
Linked List Implementation of Priority Queues
1 3 4 7 8 9 10 14 16L
Suppose an item with key 15 is to be added:
1 3 4 7 8 9 10 14 16L
15
Only O(1) (constant) pointer changes required, but it takesO(N) pointer traversals to find the location for insertion.
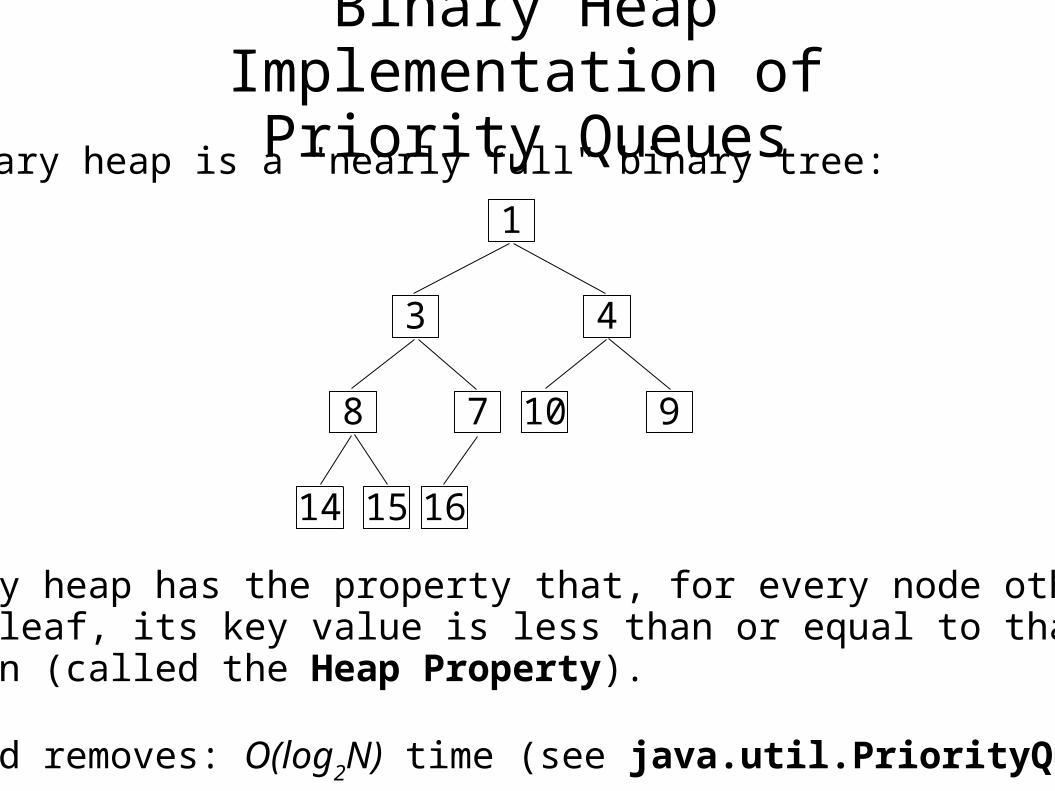
Binary Heap Implementation of Priority Queues
A binary heap is a "nearly full" binary tree:
1
3 4
7 98 10
14 1615
A binary heap has the property that, for every node otherthan a leaf, its key value is less than or equal to that of itschildren (called the Heap Property).
Adds and removes: O(log2N) time (see java.util.PriorityQueue)

Example State Space With Heuristics
1
3 4 52
6 7 8 9 1110 12
1413
19 2120
16 1715
23 2422
26 2725
18
28 Goal State
4
3
2
1
0
2
2
2
45
3 3

"Best-First'' State Space Search
● If the general search algorithm is used on a priority queue where the key value is a heuristic, it is called a "best-first'' search
● "Best-first'' search, despite its name, is not optimal
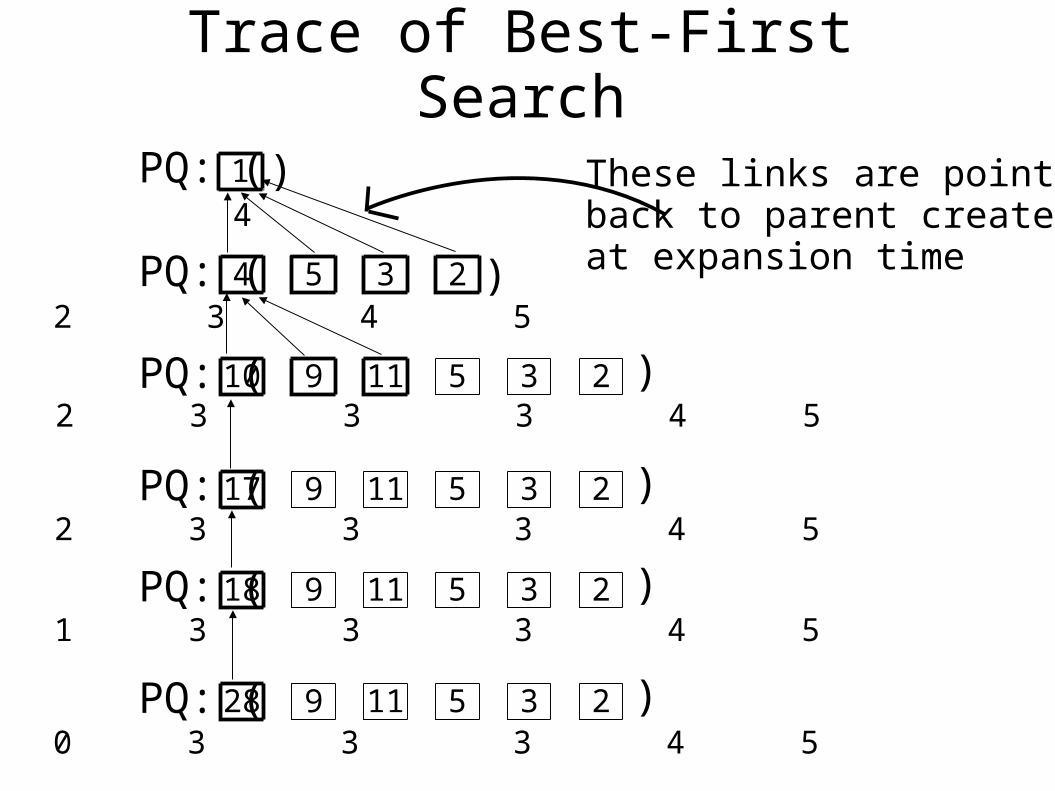
Trace of Best-First Search
PQ: ( 1 )
4 5 3 2 2 3 4 5
4
PQ: ( )
10 9 11 5 PQ: ( 3 2 ) 2 3 3 3 4 5
17 9 11 5 PQ: ( 3 2 ) 2 3 3 3 4 5
18 9 11 5 PQ: ( 3 2 ) 1 3 3 3 4 5
28 9 11 5 PQ: ( 3 2 ) 0 3 3 3 4 5
These links are pointersback to parent createdat expansion time

Notes On Best-First Search
● Solution path found in the example:– 1 4 10 17 18 28
● Shortest possible solution:– 1 12 18 28
● Therefore best-first search is not optimal● The problem: the heuristic function rates state 4
better than state 5● Moral: heuristic functions are not perfect

Recall 8-puzzle Heuristic2 8 31 6 47 5
2 8 31 47 6 5
2 31 8 47 6 5
up
up
2 8 31 6 4
7 5
2 8 31 6 47 5
left right
2 8 36 4
1 7 5
up2 8 31 67 5 4
left
4
5 3 5
5 3 62 8 3 1 47 6 5
left
3 2 8 31 47 6 5
4right
This state leads to the shortest solution
This state maynot lead to theshortest solution

Forcing an Optimal SolutionIn Previous Example
● The problem is that 18 is created as a result of expanding 17 instead of 12
● 12 is preferred to 17 because it is shallower in the state space
● We can force 12 to precede 17 in the PQ by adding a state's depth to its heuristic value before adding it.
● When we order the PQ by key = heuristic + depth, then the search is called A*.
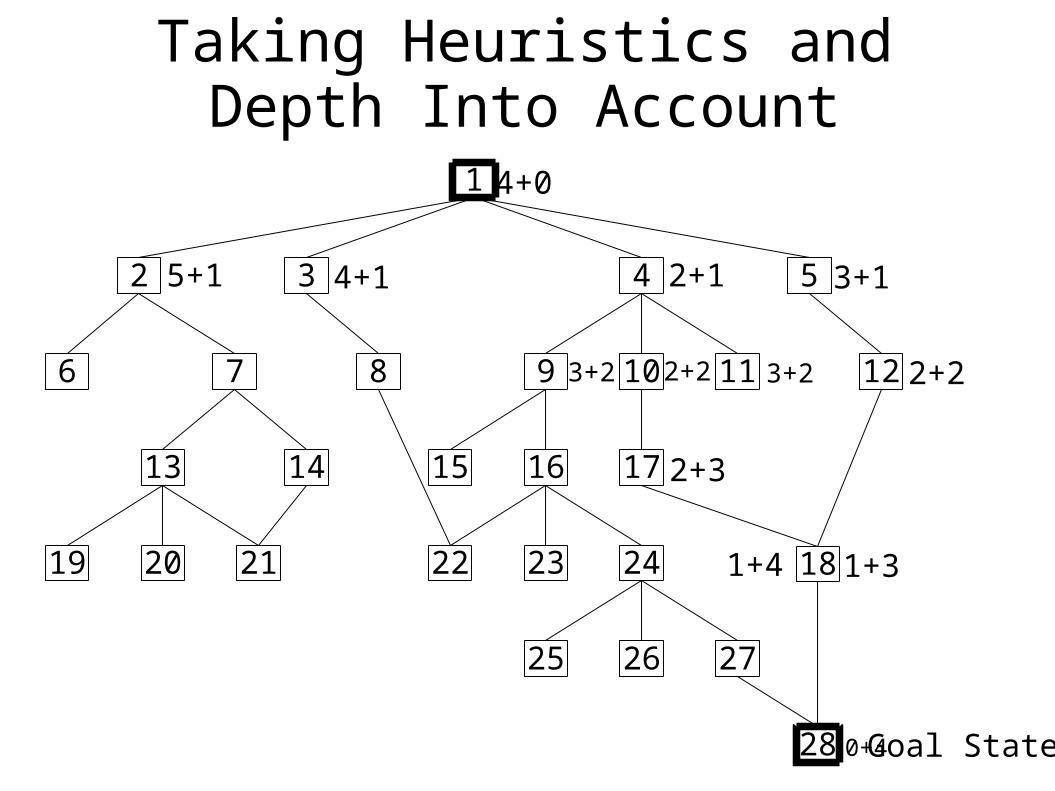
Taking Heuristics and Depth Into Account
1
3 4 52
6 7 8 9 1110 12
1413
19 2120
16 1715
23 2422
26 2725
18
28 Goal State
4+0
3+1
2+2
1+3
0+4
2+1
2+2
2+3
4+15+1
3+2 3+2
1+4
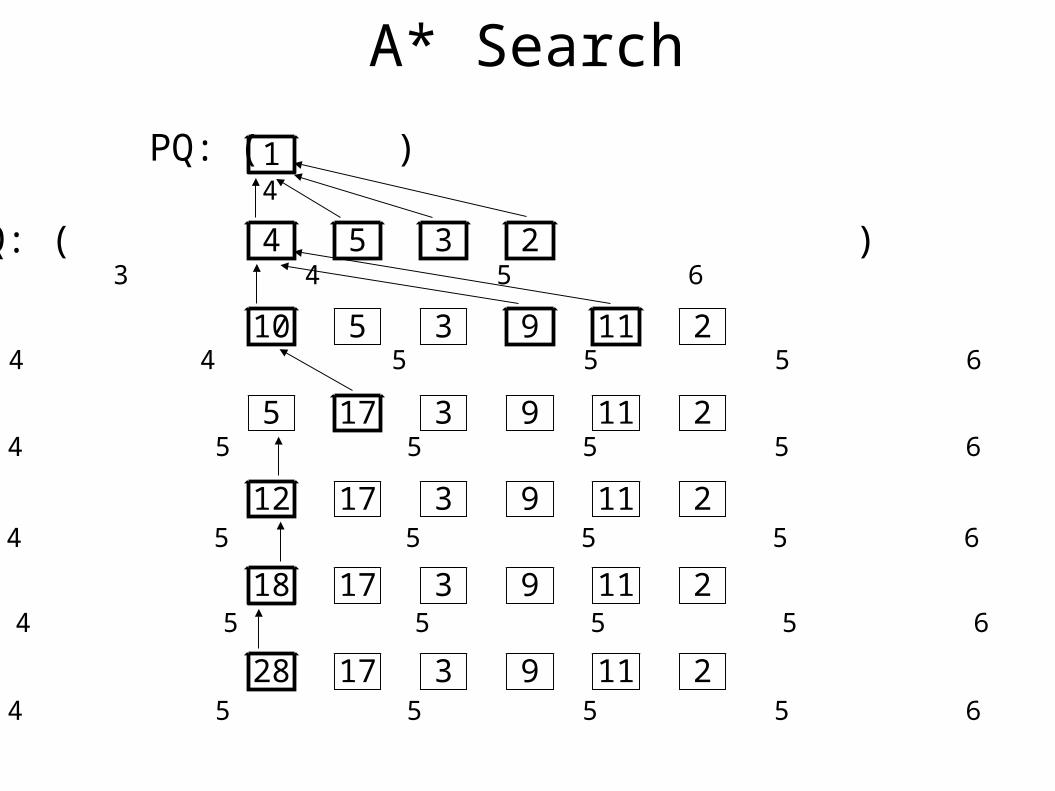
A* Search
1
4 5 3 2
10 5 3 9 11 2
5 17 3 9 11 2
12 17 3 9 11 2
18 17 3 9 11 2
28 17 3 9 11 2
4
3 4 5 6
4 4 5 5 5 6
4 5 5 5 5 6
4 5 5 5 5 6
4 5 5 5 5 6
4 5 5 5 5 6
PQ: ( )
PQ: ( )
PQ: ( )
PQ: ( )
PQ: ( )
PQ: ( )
PQ: ( )

Notes on A* Search● Q: What is the solution path?
– descended from – descended from – descended from – descended from
● A: 1 → 5 → 12 → 18 → 28 (optimal)● If A* is used, and the heuristic never
overestimates the number of moves required, a shortest solution is guaranteed (theorem).
● The number-of-misplaced-tiles heuristic never overestimates
28 18
18
12
5
12
5
1

BFS As A Special Case of A*
● Suppose the heuristic function is h(n) = 0● Then the priority queue key will be:
➢ h(n) + depth(n) = 0 + depth(n) = depth(n)● If the children of an item at depth k are added to a
priority queue they will go to the end (since they are at depth k+1)
● Therefore all items at depth k will be examined before items at depth k+1= the definition of BFS

Some Heuristics Are Better Than Others
● Although the number-of-misplaced-tiles heuristic never overestimates, we could do better without overestimating
2 8 31 6 47 5
2 8 31 47 6 5
2 31 8 47 6 5
up
up
4
3
32 8 3 1 47 6 5
left
3 2 8 31 47 6 5
4right
This state is better becausethe 8 is closer to its destination.
A more informed heuristic isthe sum of the "Manhattandistances'' that the tiles are outof place.
1 2 38 47 6 5
0

8-puzzle Heuristic Function:Sum of Manhattan Distances
2 8 31 6 47 5
2 8 31 47 6 5
2 31 8 47 6 5
2 31 8 47 6 5
1 2 38 4
7 6 5
1 2 38 47 6 5
up
up
left
down
right
2 8 31 6 4
7 5
2 8 31 6 47 5
left right
2 8 36 4
1 7 5
up2 8 31 67 5 4
up
5
6 4 6
7 3 7
2
1
0
2 8 3 1 47 6 5
left
5 2 8 31 47 6 5
5right
Comparing Heuristic Functions
● A heuristic h1 is more informed than another
heuristic h2 if:
– For all items n in the search space, h1(n) h
2(n)
● The more informed the heuristic, the fewer items will be expanded
● If a heuristic is more informed without overestimating, then it is more efficient as well as optimal
● The sum-of-Manhattan-distances heuristic does not overestimate

Implementing Heuristics
● Need to add depth and heuristic to Node class as instance variables
● Abstract computeHeuristic(State) method can be added to Problem class; overridden in subclasses
● Depth and heuristic can be computed at expand time (depth of child = 1 + depth of parent)
● Use key = depth + heuristic to insert into priority queue