injection d’a priorispatial dans la construction d’une
TRANSCRIPT

Segmentation multi-échelle
Injection d’a priori spatial dans la construction d’une hiérarchie optimale de régions
Jean-Pierre Cocquerez, Karim Yousfi
Université de Technologie de Compiègne (UTC)F-60205 Compiè[email protected]
RÉSUMÉ. Ce travail présente une méthode de construction optimale de hiérarchie de régionsavec injection d’a priori dans le cadre de la théorie ensemble échelle. Cette approche reposesur la minimisation d’une énergie sous-additive qui intègre un a priori spatial.ABSTRACT. This work presents an optimal method of construction of hierarchy of regions withinjection of a priori within the framework of the scale set theory. This approach is based on theminimization of an under additive energy in which the spatial a priori is embedded.MOTS-CLÉS : segmentation multi-échelle, hiérarchie de région, segmentation interactive avec a priori spatial.KEYWORDS: multiscale segmentation, hierachy of regions, interactive segmentation with spa-tial priori.
DOI:10.3166/TS.28.477-513 © 2011 Lavoisier
Traitement du signal – n° 5/2011, 477-513
Cocquerez 28/02/12 13:08 Page 477

Extended abstract
In this article, we propose an innovative approach of construction of hierarchy ofregions. The building of the hierarchy is based on an energy model and on an optimalmerging process. Our objective is to adapt this hierarchy to the complexity of objectscomposing the image. To reach this objective, we incorporate a spatial a priori whichunderlines the importance of some objects and structures in the image. In the firstpart of the article we introduce the multi-scale segmentation paradigm by comparingsome existing works. In the second part, some aspects of the Scale-set theory arerecalled. In the third part, we present some theoretical aspects of our approach basedon the exploitation of a sub additive energy in which we incorporate a spatial energyterm. We suggest various ways of building this spatial energy. The last part is devotedto some experimental results.
In a mathematical framework, a set-scale representation is a hierarchy of regionsor a monotonous suite of partitions. Most of the existing methods are local and thevertical axe in the hierarchy is not a scale but a level. For this reason we proposed in(Guigues et al., 2006) to represent the image as a hierarchy of regions in which thehorizontal cuts are indexed with a scale value or in an other way as a monotonoussuite of partitions. The merging process is optimal due to minimization of an energycontaining as a classical way, a term of attach to the data and a term of regularization.The energy of regularization is under additive and based on the functional ofMumford-Shah (Mumford et al., 1989) who corresponds to a constant piecewisemodel of the image. Results are very satisfactory, but we noticed erroneous fusionsand premature absorptions (in scale) of relevant structures. These phenomena areunderstandable because the energies are based on low level attributes and becausedecisions are local. We thus resolve this problem by injecting a spatial a priori bydrawing blobs around relevant structures at high scale. This problem was seldomstudied within the framework of the multi-scale segmentation. In our model, spatiala priori is integrated as a spatial energy into the scale set formalism. This spatialenergy has to be sub-additive and is incorporated into the regularization term of theMumford-Shah formula. We defined three types of spatial energies: i) A mono-potential energy which represents the intensity of the attraction between a region andthe blob. This pseudo-attraction will be measured by a potential function ofattraction. ii) A multi-potential energy, which, as the mono-potential energy takesinto account both the mono-potential energy of the studied region and the energies ofthe nearby regions. iii) A bi-potential energy based on an attractive intensity betweentwo nearby regions with respect to a blob.
Various experiments have been performed on synthetic and natural images, theyillustrate the efficiency and the role of the spatial energy in the hierarchicalconstruction. A spatial energy confers a higher degree of relevance to surroundedobjects, their structures resist to the merge processes and persist a longer time in thehierarchy. A top down exploration of the hierarchy allows to find these objects morequickly in cuts containing very few regions (top of the hierarchy). Compared withhierarchy obtained without spatial a priori, the spatial a priori protect objects insidea blob from fusion with regions outside this blob.
478 Traitement du signal. Volume 28 – n° 5/2011
Cocquerez 28/02/12 13:08 Page 478

In this article, we are within the framework of an interactive segmentation whereblob is manually drawn. We also used our algorithm in a embarked system on anintelligent vehicle including two cameras and a radar. The problem is to correctlysegment areas containing pedestrians. The echo received by the radar and the multi-sensor system characteristics are exploited to draw a rectangular blob in the imagesupplied by one of the cameras. The dimension of the blob is given by the height ofa pedestrian computed by taking into account the distance to the obstacle supplied bythe radar.
1. Présentation de l’article
Dans cet article, nous proposons une approche novatrice de construction dehiérarchie de régions dont l’objectif est de s’adapter à la complexité des objetscomposant l’image. Le moyen d’y parvenir est d’intégrer un a priori spatial sous laforme d’une énergie sous-additive afin de souligner l’importance de certains objetset structures dans l’image.
Dans la première partie nous abordons la segmentation multi-échelle encomparant un certain nombre de travaux existant. Dans la deuxième partie, nousfaisons quelques rappels sur la théorie « Ensemble-Échelle » (Guigues et al., 2006).Dans la troisième partie, nous explicitons plus en détail notre démarche et nousjustifions l’importance d’injecter un a priori spatial dans l’image. Nous présentonsquelques développements théoriques de notre approche basée sur l’exploitationd’une énergie sous additive incorporant l’a priori spatial. Nous proposons différentesfaçons de construire cette énergie spatiale. La dernière partie présente quelquesrésultats d’expérimentation parmi toutes celles qui ont été menées sur un large paneld’images.
Nous signalons que pour respecter le format de publication dans la revue, nous nefournissons aucune démonstration des propositions qui apparaissent dans notredéveloppement. Le lecteur intéressé peut les trouver dans (Yousfi, 2008).
2. Segmentation multi-échelle
Un des objectifs de la segmentation d’image est de fournir une description del’image sous la forme d’une partition de régions au sens ensembliste du terme(Cocquerez et al., 1995). La segmentation multi-échelle repose sur le fait que lafinesse de la description (confère la partition) est liée à l’échelle d’analyse etdébouche sur une représentation multi-échelle de l’image. Du fait de la dualité« contour-région », on peut en répertorier deux types : la représentation espaceéchelle (Witkin, 1983) (Koenderink, et al., 1999) et la représentation ensembleéchelle (Guigues et al., 2006). La première est « orientée contour », tandis que ladeuxième est « orientée région ». Dans les sections suivantes nous rappelonsbrièvement les propriétés des deux approches.
Segmentation multi-échelle 479
Cocquerez 28/02/12 13:08 Page 479

2.1. Représentation espace échelle
La représentation espace échelle linéaire est une solution de l’équation de la chaleurqui peut être obtenue par convolution avec un noyau gaussien dont la variance constituel’échelle d’analyse spatiale (Witkin, 1983) (Koenderink, 1984). Ses propriétés sont :l’invariance par translation, rotation et changement d’échelle, le respect du principe decausalité (une transition à une échelle λj correspond à une transition à une échelle λi,avec j > i, autrement dit, il n’y a pas création de transition quand on « monte » enéchelle). La description obtenue est volumique 2D + 1D (en échelle). Cependant, il y adeux handicaps : la délocalisation des transitions quand λ augmente, la discrétisationde l’espace des échelles. Cette représentation est riche et volumineuse. À cause de cela,on choisit les échelles pertinentes d’analyse, d’où l’intérêt de posséder desconnaissances a priori sur l’image à traiter (Lindeberg, 1998).
Nous incluons dans cette section la diffusion anisotropique (Perona et al., 1990)qui est une approche espace échelle non linéaire. En effet, l’équation de la chaleur estrésolue avec un réglage local de l’échelle (variance) lié à l’intensité du gradient.L’inconvénient de cette approche est l’absence d’une solution analytique. Larésolution de l’équation de la chaleur utilise un schéma numérique où il faut régler lenombre d’itérations. On perd ainsi l’accès facile au paramètre échelle qui existaitdans l’approche espace échelle linéaire. Par ailleurs, il faut estimer un seuil.
2.2. Représentation ensemble-échelle
Se réferrant à la définition ensembliste d’une partition, une représentation« ensemble-échelle » (en anglais scale-set) est une hiérarchie de régions ou une suitemonotone de partitions. De telles représentations sont obtenues classiquement parl’application d’algorithmes de fusion de régions exploitant des prédicatsd’agrégation. Ces approches anciennes ont fait l’objet de nombreux travaux, on peuten trouver un exemple dans (Haris et al., 1998). Ces méthodes sont locales et l’indicedans la hiérarchie n’est pas une échelle mais un niveau. C’est la raison pour laquelleGuigue & al proposent dans (Guigue et al., 2006) une représentation de l’image sousforme d’une hiérarchie de régions dont les coupes horizontales sont des partitionsmonotones indicées continument en échelle et optimales au sens d’une énergie affine.
3. Théorie « Ensemble Échelle », rappel de quelques définitions et résultats
Une hiérarchie H peut être représentée par un arbre T = (H,E), pluscommunément appelé : dendrogramme (voir Figure 1). Les nœuds de l’arbre Treprésentent les régions de la hiérarchie H (la racine de l’arbre T étant le domaineentier de l’image D), tandis que les arêtes E de l’arbre T correspondent à la relationde couverture (⊂, i.e l’inclusion stricte) entre les éléments de H. On notera par F(x)le père d’un nœud x et par S(x) l’ensemble des nœuds fils du nœud x.
Pour tout nœud x appartenant à la hiérarchie H, le sous ensemble de H définit parH(x) � {y ∈ H,y ⊆ x} est une hiérarchie sur x, appelée “hiérarchie partielle”induite par x, (voir Figure 1).
480 Traitement du signal. Volume 28 – n° 5/2011
Cocquerez 28/02/12 13:08 Page 480

Une coupe C , dans une hiérarchie H est un sous-ensemble de nœuds de lahiérarchie H formant une partition du domaine D de l’image.
On appelle un critère croissant sur une hiérarchie H toute applicationλ : H −→ R
+ vérifiant la propriété suivante :
∀x,y ∈ H,x ⊆ y ⇒ λ(x) ≤ λ(y).
Une hiérarchie indicée est un couple (H,λ), où H est une hiérarchie et λ est uncritère croissant sur H, nul sur ses feuilles. Dans ce cas, le critère λ est appelé indice.L’indice de la hiérarchie permet de tracer les nœuds de la hiérarchie H en leuraffectant des ordonnées dans la représentation.
Une distance ultramétrique δ sur un ensemble D est une distance qui vérifietoutes les propriétés classiques d’une distance métrique et une inégalité plus forte quel’inégalité triangulaire :
∀x,y,z ∈ D δ(x,z) ≤ max(δ(x,y),δ(y,z)).
Si (H,λ) est une hiérarchie indicée, alors la fonction δ : D ×D −→ R+ définie par
δ(x,y) = λ({x} ∨ {y}), (1)
est une distance ultramétrique sur D où ∨ représente le supremum au sens del’inclusion sur la hiérarchie H.
Le concept d’énergie séparable est utile pour aboutir à un certain nombre depropriétés dans la théorie ensemble échelle. Si on note E : P(D) −→ R
+ l’énergied’une partition P. Une énergie E est séparable, si et seulement si :
E(P) =∑R∈P
E(R).
Segmentation multi-échelle 481
Figure 1. Hiérarchie/dendogramme, coupe, hiérarchie partielle.H(x) est la hiérarchie partielle induite par x. C1 et C2 sont deux coupes
quelconques qui forment deux partitions distinctes d’éléments de H
Cocquerez 28/02/12 13:08 Page 481

Ces rappels étant faits, examinons quelques résultats importants de la théorieensemble échelle. Dans l’article (Guigues et al., 2006) nous avons démontré que lacoupe optimale C∗(x) de la hiérarchie H(x) qui minimise l’énergie E séparable peutêtre obtenue par programmation dynamique grâce à l’existence d’une relation derécurrence.
PROPOSITION 1. — Soit C∗(x) la coupe de la hiérarchie partielle H(x) quiminimise l’énergie E, i.e. :
C∗(x) = argminC∈C(H(x))
E(C) = argminC∈C(H(x))
∑y∈C
E(y).
et soit E∗(x) � E(C∗(x)) , alors :
∀x ∈ H,E∗(x) = in f{
E(x),∑
y∈S(x)
E∗(y)
}(2)
où S(x) est l’ensemble des nœuds fils de la région x dans la hiérarchie H et C(H(x))
est l’ensemble des coupes.
Ensuite, nous avons considéré une famille d’énergies, appelée Énergies affinesséparables définie comme suit :
Eλ(P) =∑R∈P
λC(R) + D(R)
tel que D représente un terme d’attache aux données qui exprime la qualité derégression, C représente un terme de régularisation et λ ∈ R est un paramètre depondération.
Les deux énergies D et C sont antagonistes. La première exprime la qualité derégression de la partition aux données observées (l’image originale) tandis que ladeuxième mesure le degré de complexité de la partition (régularité des frontières,convexité des contours des régions, coût du codage, etc.). Le paramètre λ joue le rôled’un coefficient de pondération entre les deux énergies. Pour chaque valeur de λ, onpeut calculer une partition optimale de la hiérarchie H. Notons par C∗
λ(H) la coupeoptimale (appelée λ-coupe) de H à l’échelle λ. Par ailleurs, supposons que l’énergie derégularisation C est une énergie décroissante sur l’ensemble des partitions P(D), i.e. :
∀(P,Q) ∈ P2(D) Q ≥ P ⇒ C(Q) ⊆ C(P).
Cette propriété de décroissance sur l’espace des partitions est équivalente à lapropriété de sous-additivité de cette énergie sur l’ensemble des régions P(D) , àcondition que l’énergie soit séparable, i.e. :
∀(R,S) ∈ P2(D), R ∩ S = ∅⇒ C(R ∪ S) ≤ C(R) + C(S).
482 Traitement du signal. Volume 28 – n° 5/2011
Cocquerez 28/02/12 13:08 Page 482

Le théorème suivant décrit les conditions nécessaires et suffisantes pour que lafamille de coupes (C∗
λ(H))λ∈R forme une séquence croissante de partitions.
THÉORÈME 1. — Coupes minimales causales
Soit Eλ = (C,D) une énergie affine séparable. Si l’énergie C est sous-additive,alors quelle que soit la hiérarchie H sur D, la séquence (C∗
λ(H))λ∈R des coupesminimales de H pour l’énergie Eλ est une segmentation multi-échelle, en d’autrestermes, (C∗
λ(H))λ∈R est suite monotone de partitions.
On pourra consulter la démonstration de ce théorème dans (Laurent, 2003). Laprécédente équation récursive (2) est généralisée sous une forme fonctionnelle danslaquelle l’optimisation porte sur des fonctions de λ plutôt que sur une unique valeurd’énergie à échelle fixe :
∀x ∈ H, E∗x = in f
{Ex ,
∑s∈S(x)
E∗s
}, (3)
tel que Ex : λ �→ Ex(λ) = λC(x) + D(x) représente l’énergie de la région x,appelée énergie-propre et E∗
x : λ �→ E∗x (λ) = E∗
λ(H(x)) représente l’énergie de sescoupes minimales, appelée énergie-partielle de la région x.
Cette équation de programmation dynamique fonctionnelle peut se réécrire d’uneautre manière :
E∗x (λ) =
{∑s∈S(x) E∗
s si λ < λ+(x)
Ex sinon.(4)
Nous avons également les propriétés suivantes :
Une région {x} devient la partition optimale quand l’échelle passe au dessusd’une valeur λ+(x). Le saut qui survient à l’échelle λ+(x) correspond alors à lafusion des régions filles du nœud {x}. L’énergie-propre de x est une fonction affine,non-décroissante et concave, il en est de même pour l’énergie optimale E∗
x (λ) de x.
L’échelle à partir de laquelle la région {x} devient optimale est unique et peut êtrecalculée en résolvant l’équation suivante :
Ex(λ) =∑
s∈S(x)
E∗s (λ).
où S(x) est l’ensemble des noeuds fils de x.
Ainsi, la fonction E∗x , qui fournit les énergies des coupes optimales de H(x) en
fonction du paramètre λ, est une simple fonction affine par morceaux. Elle peut êtreexplicitement mémorisée pour chaque nœud de la hiérarchie H.
Nous avons noté :
λ+(x) ={λ,Ex(λ) =
∑s∈S(x)
E∗s
}, (5)
Segmentation multi-échelle 483
Cocquerez 28/02/12 13:08 Page 483

est l’échelle d’apparition de la région x et par :
λ−(x) = miny∈H,x⊂y
{λ+(y)}, (6)
l’échelle de disparition de x. Une étape d’élagage permet d’obtenir la hiérarchiefinale :
H∗ � H − {x ∈ H |λ+(x) ≤ λ−(x)
}. (7)
Ainsi, le couple (H∗,λ+) est une hiérarchie indicée où l’échelle d’apparition desrégions joue le rôle d’indice.
(x) = [λ+(x),λ−(x)[ (8)
l’intervalle de persistance de la région x et la quantité :
�λ(x) = λ−(x) − λ+(x) (9)
désignera la persistance de la région x.
Dans (Guigues et al., 2006), on établit la propriété importante suivante qui permetde construire la hiérarchie et d’expliquer le comportement de la méthode.
PROPOSITION 2. — L’échelle d’apparition d’une région x est donnée par
λ+(x) = − D(x) − D(P)
C(x) − C(P), (10)
où P représente la partition optimale de la hiérarchie partielle de la région x.
4. Théorie « Ensemble Échelle » avec injection d’a priori
4.1. Importance de l’injection d’un a priori
Dans (Guigues et al., 2006) nous avons utilisé comme énergie de régularisationsous additive, la fonctionnelle de Mumford-Shah (Mumford et al., 1989) quicorrespond à un modèle « constant par morceaux » de l’image. Bien que, dansl’ensemble, les résultats obtenus soient très satisfaisants, nous avons constaté desfusions aberrantes et l’absorption précoce (en échelle) de structures pertinentes àhaute échelle. Ces phénomènes s’expliquent par le fait que les énergies sont baséessur des attributs de « bas niveau » et que les décisions sont locales. Nous proposonsdonc de corriger l’inadaptation du modèle en injectant un a priori spatial sous formede blobs qui entoureront les structures pertinentes à haute échelle. Ce problème a ététrès peu abordé dans le cadre de la segmentation multi-échelle.
484 Traitement du signal. Volume 28 – n° 5/2011
Cocquerez 28/02/12 13:08 Page 484

4.2. Présentation de la démarche
L’idée est de construire une énergie spatiale qui évitera la fusion précoce derégions internes au blob avec des régions connexes externes au blob. Nous avonschoisi, via cette énergie, de simuler un mécanisme d’attraction entre une région et unblob. Pour respecter les hypothèses de la théorie « ensemble échelle », cette énergiedevra être séparable et sous additive. Dans les sous-sections qui suivent, nousprésentons un certains nombre de théorèmes et de propositions de la théorie « Ensemble Échelle » avec injection d’a priori. Nous fournissons quelquesdémonstrations en Annexe. Le lecteur pourra trouver l’ensemble des démonstrationsdans (Yousfi, 2008).
4.3. Pour une énergie spatiale sous-additive
L’intégration d’une énergie spatiale dans le formalisme « ensemble-échelle »exige que celle-ci soit sous-additive (cf. théorème 1). L’énergie affine comporte unterme de régularisation qui exprime un a priori sur le modèle inféré. Ainsi dans lemodèle de Mumford-Shah, l’énergie de régularisation est le périmètre d’une région,afin d’obtenir des partitions aux contours réguliers. On peut utiliser l’énergie deconvexité en lieu et place du périmètre afin de privilégier la construction de régionsconvexes.
5. Modélisation de l’énergie spatiale
Nous envisageons de définir trois types d’énergies spatiales comme le montre lafigure 2. L’énergie mono-potentielle représente l’intensité de l’attraction entre larégion et un blob. Cette pseudo-attraction sera mesurée par un potentiel entre unerégion et un blob que l’on définira ultérieurement. À la différence de l’énergie mono-potentielle, l’énergie multi-potentielle prendra en compte l’énergie mono-potentiellede la région étudiée mais également les énergies des régions voisines. L’énergie bi-potentielle d’une région prendra également en compte le voisinage de la région maiselle s’appuiera sur la définition d’une intensité d’attraction entre deux régionsvoisines relativement à un blob.
Nous proposons que l’énergie spatiale que nous venons d’introduire soit baséesur un ou plusieurs potentiels d’attraction entre une ou des régions et un blob. Nousen avons donc défini plusieurs et étudié leur propriétés en regard de la hiérarchie descontraintes suivantes :
1) sous-additivité,
2) ultra-additivité,
3) supra-additivité,
4) convexité.
Posons quelques définitions.
Segmentation multi-échelle 485
Cocquerez 28/02/12 13:08 Page 485

Soit P = {R1,· · · ,RN
}une partition de l’image I . L’ensemble des parties sur �
sera désigné par P(�) tandis que l’ensemble des partitions sur le support de l’image� sera noté P(�).
La relation d’adjacence entre deux régions Ri et Rj sera notée : Ri ↔ Rj .
On notera V (R) = {R′ ∈ P − {R}/R′ ↔ R} l’ensemble des régions voisines de
la région R dans la partition P.
5.1. Potentiel spatial entre une ou des régions relativement à un blob
DÉFINITION 1. — On appelle potentiel sous-additif relatif à un blob B touteapplication δ(.,B) : P(�) −→ R
+ vérifiant les propriétés suivantes :
– ∀R ∈ P(�), δ(R,B) ≥ 0,
– ∀R,R ′ ∈ P(�) t.q R ↔ R′, δ(R ∪ R′
,B) ≤ δ(R,B) + δ(R′,B).
De même on peut définir les notions de potentiels ultra-additif ou supra-additifrelatif à un blob B :
DÉFINITION 2. — On appelle potentiel ultra-additif (resp. supra-additif) relatifà un blob B toute application δ(.,B) : P(�) −→ R
+ vérifiant les propriétéssuivantes :
– ∀R ∈ P(�), δ(R,B) ≥ 0,
486 Traitement du signal. Volume 28 – n° 5/2011
(a) (b) (c)
Figure 2. Les trois types d’énergies spatiales :(a) énergie mono-potentielle, (b) énergie multi-potentielle,
(c) énergie bi-potentielle
Cocquerez 28/02/12 13:08 Page 486

– Ultra-additivité : ∀R,R′ ∈ P(�) t.q R ↔ R′,
δ(R ∪ R′,B) ≤ max(δ(R,B),δ(R
′,B)).
– Supra-additivité : ∀R,R′ ∈ P(�) t.q R ↔ R′,
δ(R ∪ R′,B) ≤ min(δ(R,B),δ(R
′,B)).
REMARQUE. — Tout potentiel supra-additif est ultra-additif et tout potentiel ultra-additif est un potentiel sous-additif.
DÉFINITION 3. — On appelle potentiel convexe relatif à un blob B touteapplication δ(.,B) : P(�) −→ R
+ vérifiant les propriétés suivantes :
– ∀R ∈ P(�), δ(R,B) ≥ 0,
– ∀R1,R2 ∈ P(�) t.q R1 ↔ R2,∃α1,2 ∈]0,1[ tel que
δ(R1 ∪ R2,B) ≤ α1,2δ(R1,B) + (1 − α1,2)δ(R2,B).
REMARQUE. — Tout potentiel convexe est ultra-additif et par conséquent sous-additif.
DÉFINITION 4. — Soit B un blob appartenant au support � de l’image I . Onappelle bi-potentiel sous-additif relativement au blob B toute application vérifiantles propriétés suivantes :
– Domaine de définition :
δB : P(�) × P(�) −→ R+
(R,R′) �−→ δB(R,R′
),
– ∀R,R′ ∈ P(�), δB(R,R′) = 0 si R � R′
,
– ∀R,R′ ∈ P(�), δB(R,R′) > 0 si R ↔ R′
,
– Symétrie : ∀R,R′ ∈ P(�), δB(R,R′) = δB(R′
,R),
– Sous-additivité : ∀R,R1,R2 ∈ P(�) t.q (R1 ∪ R2) ↔ R,
δB(R1 ∪ R2,R) ≤ δB(R1,R) + δB(R2,R).
PROPOSITION 3. — Soit δ(.,B) un potentiel sous-additif (respectivement ultra-additif, supra-additif) relatif au blob B alors :
1) δB(R,R′) = δ(R,B) + δ(R′,B) est sous-additive (respectivement ultra-
additive, supra-additive) relativement au blob B.
2) δB(R,R′) = δ(R,B).δ(R′,B) est sous-additive (respectivement ultra-additive,
supra-additive) relativement au blob B.
Segmentation multi-échelle 487
Cocquerez 28/02/12 13:08 Page 487

PROPOSITION 4. — Soit δ(.,B) un potentiel supra-additif relatif au blob B alors :
δ+B (R,R
′) =
{δ(R,B) + δ(R′
,B) si R ↔ R′,
0 si R � R′.
et
δ×B (R,R
′) =
{δ(R,B) × δ(R′
,B) si R ↔ R′,
0 si R � R′.
sont des bi-potentiels sous-additifs relativement au blob B.
PROPOSITION 5. — Soit δs(.,B) un potentiel supra-additif et soit δ(.,B) unpotentiel sous-additif (resp. ultra-additif, convexe) alors l’application (δs × δ)(.,B)
est également un potentiel sous-additif (resp. ultra-additif, convexe).
5.2. Énergie spatiale relative à un blob
À l’aide des différents potentiels relatifs à un blob, nous définissons lesdifférentes énergies spatiales relatives à un blob.
5.2.1. Énergie mono/multi-potentielle relative à un blob
L’énergie spatiale mono potentielle relative à un blob B correspond simplementau mono potentiel sous-additif défini précédemment. L’énergie sera qualifiée demulti-potentielle si elle prend en compte les potentiels des régions voisines. L’énergiemono-potentielle de la région R correspond donc à l’énergie multi-potentielle pourlaquelle le voisinage de R est exclu.
DÉFINITION 5. — Soit B un blob appartenant au support � de l’image I et P unepartition quelconque. Soit δ(.,R) un potentiel sous-additif relatif au blob B. Onappelle énergie multi-potentielle relativement au blob B toute applicationD(.,B) : P(�) −→ R
+ définie par la relation suivante :∀R ∈ P(�), D(R,B) =
∑R′ ∈T (R)
δ(R′,B).
telle que T (R) = V (R) ∪ {R} englobe le voisinage de la région R ainsi que la régionR elle-même. Dans le cas où T (R) = {R} on dira que l’énergie est mono-potentielle.
PROPOSITION 6. — Toute énergie multi-potentielle (ou mono-potentielle) relativeà un blob B est sous-additive.
Convexité d’une énergie spatiale relative à un blob
DÉFINITION 6. — Soit D(.,B) une énergie relative au blob B. On dit que D(.,B)
est une énergie convexe si et seulement si :∀R1,R2 t.q R1 ↔ R2, ∃α1,2 ∈ [0,1],
D(R1 ∪ R2,B) ≤ α1,2 D(R1,B) + (1 − α1,2)D(R2,B).
La constante α1,2 dépend des régions R1 et R2.
488 Traitement du signal. Volume 28 – n° 5/2011
Cocquerez 28/02/12 13:08 Page 488

PROPOSITION 7. — Toute énergie, relative à un blob B, convexe est ultra-additiveet par conséquent sous-additive.
5.2.2. Énergie bi-potentielle relative à un blob
Nous avons défini précédemment la notion de bi-potentiel sous-additif entre deuxrégions voisines, relativement à un blob B. L’énergie bi-potentielle d’une région estdéfinie par la somme des bi-potentiels entre cette région et ses régions voisinescomme le résume la définition ci-dessous :
DÉFINITION 7. — Soit B un blob appartenant au support � de l’image I et P unepartition quelconque. Soit δB un bi-potentiel sous-additif relatif au blob B. Onappelle énergie bi-potentielle relativement au blob B toute application D(.,B) :P(�) −→ R
+ définie par la relation suivante :
∀R ∈ P(�), D(R,B) =∑
R′ ∈V (R)
δB(R,R′).
tel que V (R) représente le voisinage de la région R.
PROPOSITION 8. — Soit P une partition de l’image I et δB un bi-potentiel sous-additif relatif au blob B. Toute énergie bi-potentielle relative à un blob B est sous-additive, i.e. :
∀R1,R2 ∈ P t.q R1 ↔ R2, D(R1 ∪ R2,B) ≤ D(R1,B) + D(R2,B).
5.3. Énergie d’a priori spatial relativement à un ensemble de blobs
Ayant défini les énergies d’a priori spatial relativement à un blob, nous proposonsd’étendre les définitions relativement à un ensemble de blobs B, i.e., relativement à l’image-blob IB. Pour cela, nous considérons le vecteur
−−−−−→DB(R,.) caractérisant les
différentes interactions entre la région R et les blobs.
DÉFINITION 8. — Soit B = {B1,· · · ,BM} l’ensemble des blobs tracés dans l’imageI et soient D(.,Bk), k = 1,. . . ,M, les énergies bi-potentielles sous-additivesrelatives aux blobs
{Bk
}k=1,...,M. Soit ‖.‖ la norme issue du produit scalaire <.,.>,
définie sur l’espace RM. On appelle énergie spatiale bi-potentielle toute applicationDB : P(�) −→ R
+ définie par :
∀R ∈ P(�), DB(R) = ‖−−−−−→DB(R,.)‖ =
√<
−−−−−→DB(R,.),
−−−−−→DB(R,.) >,
telle que−−−−−→DB(R,.) = {D(R,Bk)}k=1,···,M .
Segmentation multi-échelle 489
Cocquerez 28/02/12 13:08 Page 489

DÉFINITION 9. — Soit B = {B1,· · · ,BM} l’ensemble des blobs issus de l’image Iet soient D(.,Bk), k = 1,. . . ,M, les énergies multi/mono-potentielles sous-additivesrelatives aux blobs
{Bk
}k=1,...,M. Soit ‖.‖ la norme issue du produit scalaire <.,.>,
définie sur l’espace RM. On appelle énergie spatiale multi/mono-potentielle touteapplication DB : P(�) −→ R
+ définie par :
∀R ∈ P(�), DB(R) = ‖−−−−−→DB(R,.)‖ =
√<
−−−−−→DB(R,.),
−−−−−→DB(R,.) >,
telle que −−−−−→DB(R,.) = {D(R,Bk)}k=1,···,M.
Ainsi, l’énergie d’une région relativement à l’ensemble des blobs représentel’intensité du vecteur potentiel de la région relativement aux blobs B1,. . . ,BM. Nousavons montré que la sous-additivité des énergies D(R,Bk),k = 1,...,M (qu’ellessoient bi, mono ou multi-potentielles) entraîne la sous-additivité de la norme duvecteur
−−−−−→DB(R,.).
Les deux propositions suivantes étendent donc la définition de l’énergie spatialeDB à la norme Lp 1. Elles posent les conditions supplémentaires pour que l’énergieDB soit sous-additive :
PROPOSITION 9. — Si D(.,B) est une énergie bi/mono/multi-potentielle convexealors l’énergie spatiale « DB », issue de cette énergie et définie par
DB(R) = ‖−−−−−→DB(R,.)‖p
p
est convexe pour p ≥ 1 et par conséquent sous-additive.
PROPOSITION 10. — Si D(.,B) est une énergie bi/mono/multi-potentielle sous-additive alors l’énergie spatiale « DB », issue de cette énergie et définie par
DB(R) = ‖−−−−−→DB(R,.)‖p
est sous-additive pour p = 1,+∞ .
DÉFINITION 10. — Soit B = {B1,· · · ,BM} l’ensemble des blobs issus de l’image Iet soit DB une énergie spatiale (mono, multi ou bi-potentielle). Alors l’énergieDB : P(�) −→ R
+ définie par :
DB(P) =∑R∈P
DB(R),
est une énergie séparable et sous-additive par construction.
490 Traitement du signal. Volume 28 – n° 5/2011
1. ‖−→x ‖pp =
∑k=1,···,M
x pk , pour x ∈ P
M et p ≥ 1.
Cocquerez 28/02/12 13:08 Page 490

5.4. Construction de potentiels sous-, ultra- et/ou supra-additifs
Nous allons maintenant nous intéresser aux différentes énergies spatiales sous-additives que l’on peut construire à partir de la définition d’un potentielsous/ultra/supra-additif ou convexe relatif à un blob B.
5.4.1. Potentiel supra-additif
La condition de supra-additivité est plus contraignante que la sous-additivité, laconvexité et l’ultra-additivité. Cependant, elle est une condition nécessaire pour laconstruction d’une énergie bi-potentielle relativement à un blob B.
Avant d’énoncer une condition suffisante pour qu’un potentiel soit supra-additif,nous allons définir des distances qui seront exploitées dans la définition de potentiels.
DÉFINITION 11. — Soit d une distance métrique définie sur le support � del’image I et cB le centre de gravité d’un blob B.
On appellera distance de lien minimum relativement au blob B la distance définiepar la relation suivante :
dmin(R,B) = minx∈R
{d(x,cB)},
On appellera distance de lien complet relativement au blob B la distance définiepar la relation suivante :
dmax(R,B) = maxx∈R
{d(x,cB)}.
PROPOSITION 11. — Pour R1 et R2 deux régions adjacentes et disjointes, on a lespropriétés suivantes :
– dmin(R1 ∪ R2,B) = min(dmin(R1,B),dmin(R2,B) ,
– dmax(R1 ∪ R2,B) = max(dmax(R1,B),dmax(R2,B) .
Revenons maintenant aux potentiels.
PROPOSITION 12. — Tout potentiel δ(.,B) décroissant au sens de l’ordred’inclusion est un potentiel supra-additif.
PROPOSITION 13. — Soit δs(.,B) un potentiel supra-additif relativement au blob Bet soient dmin et dmax respectivement les distances du lien minimum et du lienmaximum relatives au blob B et définies à partir d’une distance métrique d, alors :
– δmin(.,B) = δs(.,B)dmin(.,B) est un potentiel supra-additif dit de lien minimumet
– δmax(.,B) = δs (.,B)
dmax (.,B)est un potentiel supra-additif dit de lien complet.
Segmentation multi-échelle 491
Cocquerez 28/02/12 13:08 Page 491

D’autres potentiels supra-additifs peuvent être construits en se basant sur desfonctions autres que β
γ0+γ1|R∩B|.
Nous donnons ici une liste qui n’est pas exhaustive :
– δs(R,B) = 1|R||B|,
– δs(R,B) = |B||R| ,
– δs(R,B) = e−K .|R||B| ,
– δs(R,B) = e−K |R∩B||B| ,
– δs(R,B) = eK .|B|−|R| .
L’existence de potentiels supra-additifs permet alors de garantir que les bi-potentiels δ+
B et δ×B , définis à travers les potentiels cités ci-dessus, seront sous-additifs
(cf. la proposition 4). Ainsi, par construction, les énergies bi-potentielles spatialesseront par conséquent sous-additives (voir la proposition 5).
5.4.2. La convexité
Nous avons vu que la convexité d’un potentiel entraîne son ultra-additivité et parconséquent sa sous-additivité. Nous allons dans un premier temps nous intéresser auxpotentiels dits « convexes », qui permettent aisément la construction d’énergies monoet/ou multi-potentielles sous-additives.
Soit P une partition de l’image I et B l’ensemble des blobs de cette image. Lepremier potentiel simple que l’on peut construire est celui qui représente laproportion d’une région dans un blob B.
∀R ∈ P, δ1(R,B) = |R ∩ B||R| .
Propriétés :
– ∀R ∈ P, 0 ≤ δ1(R,B) ≤ 1,
– Si R ⊆ B alors δ1(R,B) = 1,
– Si R ∩ B = ∅ alors δ1(R,B) = 0,
– ∀Ri ,Rj ∈ P t.q Ri ↔ Rj ,
δ1(Ri ∪ Rj ,B) = |Ri ||Ri | + |Rj | δ1(Ri ,B) + |Rj |
|Ri | + |Rj | δ1(Rj ,B).
492 Traitement du signal. Volume 28 – n° 5/2011
Cocquerez 28/02/12 13:08 Page 492

DÉFINITION 12. — Soit d une distance métrique sur � ⊆ R2 issue d’un produitscalaire < .,. >. On appelle potentiel attractif relativement au blob B la fonctiondéfinie par :
∀R ∈ P(�), δ2(R,B) = βd2(R,B)
|R|.|B| ,
où β est une constante qui dépend du blob B et d(R,B) = d(cR,cB) représente ladistance entre les centres de gravité de la région R et du blob B.
PROPOSITION 14. — Le potentiel attractif relatif au blob B est convexe et parconséquent sous-additif.
LEMME 1. — Soit d une distance métrique sur � ⊆ R2 issue d’un produit scalaire< .,. > alors :
∀Ri ,Rj t.q Ri ↔ Rj ,
d2(Ri ∪ Rj ,B) = α d2(Ri ,B) + (1 − α) d2(Rj ,B) − α(1 − α) d2(Ri ,Rj ),
avec α = |Ri ||Ri |+|Rj |.
Il apparaît donc que le potentiel attractif relatif δ2(.,B) est sous-additif et peut parconséquent servir à la construction d’une énergie spatiale mono- ou multi-potentielle.
À l’inverse du premier potentiel δ1(.,B) , le potentiel attractif inclut une distancespatiale entre la région et le blob B. Il se présente sous la forme de l’inverse de laforce d’attraction entre deux objets.
Nous allons maintenant établir une forme plus générale de ce potentiel.
DÉFINITION 13. — On appelle une fonction faiblement sur-additive relativementà un blob B toute application f (.,B) : P(�) −→ R
+ vérifiant les propriétéssuivantes :
– ∀R ∈ P(�), f (R,B) ≥ 0,
– ∀R,R ′ ∈ P(�) t.q R ↔ R′, f (R ∪ R′
,B) ≥ max( f (R,B), f (R′,B)).
PROPOSITION 15. — Soit B un blob, d une distance métrique issue d’un produitscalaire et f une fonction faiblement sur-additive, alors
∀R ∈ P(�), δ2(R,B) = βd2(R,B)
f (R,B),
est un potentiel convexe et par conséquent sous-additif relativement au blob B.
PROPOSITION 16. — Toute fonction additive, sur-additive ou croissante pourl’ordre d’inclusion est une fonction faiblement sur-additive.
Segmentation multi-échelle 493
Cocquerez 28/02/12 13:08 Page 493

Dès lors, nous pouvons proposer d’autres potentiels convexes (donc sous-additifs) qu’on appellera pseudo-attractifs en remplaçant le produit des masses dela région et du blob, |R| × |B|, par une fonction faiblement sur-additive. Dans ce quisuit nous énumérerons des exemples de potentiels sous-additifs « pseudo-attractifs »,à partir de fonctions toutes supra-additives en raison de leur croissance ou de leursur-additivité :
1) pour f (R,B) = 1, on obtient δ(R,B) = d2(R,B) ,
2) si f (R,B) = |R ∪ B|, on obtient δ(R,B) = d2(R,B)
|R∪B| ,
3) si f (R,B) = |R||B|, on obtient δ(R,B) = d2(R,B)
|R|/|B| ,
4) …, etc.
LEMME 2. — L’inverse d’une fonction supra-additive est une fonction faiblementsur-additive et réciproquement.
Ce lemme dont la démonstration est triviale nous permet alors d’utiliser l’inversedes fonctions supra-additives, définies dans la section précédente, comme fonctionsfaiblement sur-additives. Pour exemple, nous pouvons citer :
1) f (R,B) = eK .|R||B| ,
2) si f (R,B) = eK |R∩B||B| ,
3) si f (R,B) = e−(K .|B|−|R|),
4) …, etc.
Tous ces potentiels sous-additifs (car possédant la propriété de convexité) « pseudo-attractifs », peuvent être utilisés dans la construction d’une énergie spatialesous-additive dont il convient de tester la pertinence. Il en existe d’autres mais nousnous contenterons de ceux cités ci-dessus.
Cadre de blobs elliptiques : distance de Mahalanobis
Dans le cas de blobs elliptiques, tout blob Bk est caractérisé par la longueur de sesaxes majeur et mineur : ak , bk ainsi que son orientation αk. Nous pouvons ainsiutiliser la distance de Mahalanobis dans la construction d’un potentiel pseudoattractif.
La distance de Mahalanobis est définie par :
d�(x,y)2 = (x − y)t�−1(x − y)
pour x,y ∈ PM.
La norme de Mahalanobis est définie par :
‖x‖2� = xt�−1x
pour x ∈ RM.
494 Traitement du signal. Volume 28 – n° 5/2011
Cocquerez 28/02/12 13:08 Page 494

Ainsi chaque blob elliptique Bk dans R2 est caractérisé par sa matrice de
covariance ��−1k qui s’écrit en fonction de ak , bk et αk comme suit :
��−1k =
cos2(αk )
a2k
+ sin2(αk )
a2k
−sin(2.αk)/2( 1a2
k− 1
b2k)
−sin(2.αk)/2( 1a2
k− 1
b2k)
sin2(αk )
a2k
+ cos2(αk )
a2k
Le potentiel pseudo-attractif d’une région relativement à un blob s’écrirait :
δ�−1k
(R,Bk) = β
d2�−1
k(R,Bk)
f (R,Bk)
tel que f (R,Bk) est une fonction faiblement sur-additive.
5.4.3. La sous-additivité
Comme nous l’avons vu précédemment, une distance métrique issue d’un produitscalaire possède la propriété de convexité. Ceci entraîne la convexité des potentielsétudiés dans la précédente section et par conséquent leur sous-additivité.
Nous allons maintenant présenter une distance sous-additive connue sous le nomde « distance du cosinus ».
PROPOSITION 17. — Soit < x,y >= ∑i=1,···,M xi .yi le produit scalaire usuel
défini sur � ⊆ R+ × R+ . La distance du cosinus relativement au blob B, définiepar :
dcos(R,B) = dcos(cR,cB) = < cR,cB >
‖cR‖ . ‖cB‖est sous-additive.
PROPOSITION 18. — Soit B un blob, < .,. > le produit scalaire usuel défini sur� ∈ R+ × R+ et f une fonction faiblement sur-additive, alors
∀R ∈ P(�), δ3(R,B) = βdcos(R,B)
f (R,B),
est un potentiel sous-additif relativement au blob B.
Ainsi la distance du cosinus combinée avec une fonction faiblement sur-additivepermet de construire des potentiels sous-additifs qu’on peut aussi assimiler à despotentiels pseudo-attractifs.
5.5. Récapitulatif
Dans les deux précédentes sections nous avons développé une méthode deconstruction d’une énergie spatiale sur une partition. Cette méthode est ascendante,
Segmentation multi-échelle 495
Cocquerez 28/02/12 13:08 Page 495

elle commence par la définition d’un potentiel d’une région, relativement à un blob,qui mesure l’intensité d’attraction. Nous avons ensuite proposé de définir l’énergied’une région relativement à un blob de trois différentes manières. Une énergie mono-potentielle mesure uniquement le degré d’attraction entre une région et un blob. Uneénergie multi-potentielle mesure l’attraction d’une région à un blob en tenant compteaussi des potentiels des voisins de la région. L’énergie bi-potentielle s’appuie quantà elle sur la définition d’un potentiel d’attraction entre deux régions relativement àun blob. L’énergie de la région est alors la somme des bi-potentiels de la région avectoute région voisine.
Finalement, l’énergie spatiale d’une région DB(R) est définie par la norme duvecteur des énergies relatives à chaque blob. La convexité d’un potentiel combinée àcelle d’une norme nous assure que l’énergie spatiale d’une région est convexe et parconséquent sous-additive. On notera que si le potentiel est uniquement sous-additifalors la norme utilisée dans la définition de l’énergie spatiale d’une région et quigarantit sa sous-additivité est la norme 1 et la norme infini (voir la proposition 10).
6. Résultats
Nous présentons les résultats obtenus sur des images de synthèse et des imagesréelles. L’analyse des résultats sur images de synthèse permet d’illustrer lecomportement de nos nouveaux algorithmes et montre parfaitement le rôle de l’a priorispatial. Compte tenu du nombre de possibilités de combinaisons d’énergies et defonctions potentielles, il était difficile de présenter les résultats de manière exhaustivedans le cadre d’un article. Cette étude détaillée existe dans (Yousfi, 2008). Nousavons donc choisi de présenter les résultats les plus significatifs, sachant que dans laplupart des cas, le choix de la fonction potentielle n’agit pas de manière trèssignificative.
Dans tous les cas, nous avons utilisé comme partition d’initialisation la sur-segmentation obtenue par un algorithme de ligne de partage des eaux. Lesreprésentations ensembles-échelles sans a priori spatial seront construites sur la basedu modèle constant par morceaux de Mumford-Shah.
Les représentations ensembles-échelles avec a priori spatial seront construites encombinant la même énergie radiométrique (écart quadratique) et une énergie spatialequi peut être mono, multi ou bi-potentielle.
6.1. Cas d’un blob
Nous allons dans un premier temps nous restreindre à un seul objet d’intérêt dansl’image et par conséquent l’a priori spatial sera composé d’un seul blob.
6.1.1. Énergie spatiale mono-potentielle
La construction d’une énergie spatiale mono-potentielle nécessite de faire leschoix suivants :
496 Traitement du signal. Volume 28 – n° 5/2011
Cocquerez 28/02/12 13:08 Page 496
1) une distance métrique telle que la distance euclidienne, la distance deMahalanobis ou la distance du cosinus,
2) une fonction faiblement sur-additive : |R|.|B| , |R ∩ B|/|R|, eK .|R||B| ou eK |R∩B|
|R| ,
3) une norme pour le vecteur des énergies relatives aux blobs : L2, L1 ou L∞ .
Comme nous l’avons indiqué quelques lignes au dessus, le nombre decombinaisons entre distance, fonction faiblement sur-additive et norme est importantet nous ne pourrons pas les explorer toutes. On se limitera à quelques configurationspour tester et analyser le comportement de l’énergie spatiale mono-potentielle.
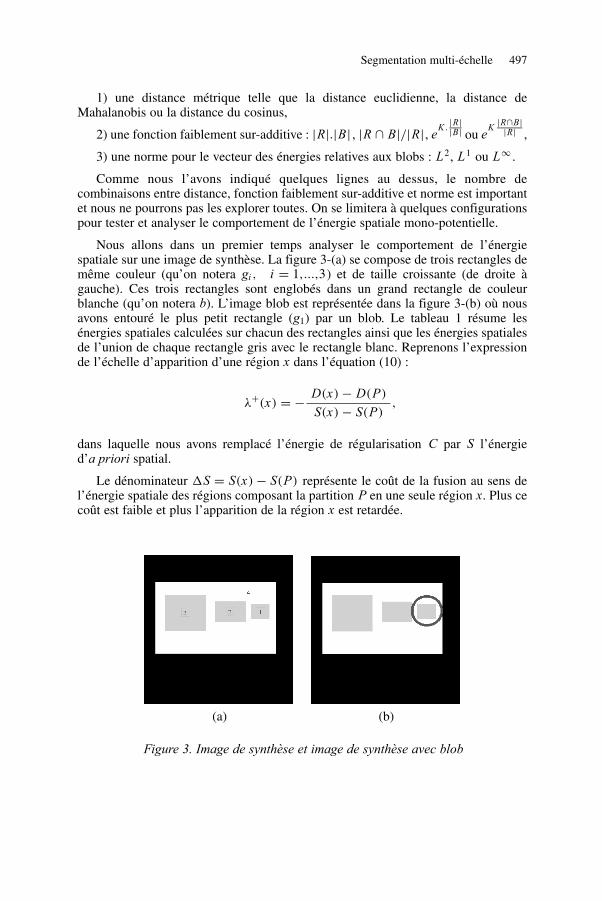
Nous allons dans un premier temps analyser le comportement de l’énergiespatiale sur une image de synthèse. La figure 3-(a) se compose de trois rectangles demême couleur (qu’on notera gi , i = 1,...,3) et de taille croissante (de droite àgauche). Ces trois rectangles sont englobés dans un grand rectangle de couleurblanche (qu’on notera b). L’image blob est représentée dans la figure 3-(b) où nousavons entouré le plus petit rectangle (g1) par un blob. Le tableau 1 résume lesénergies spatiales calculées sur chacun des rectangles ainsi que les énergies spatialesde l’union de chaque rectangle gris avec le rectangle blanc. Reprenons l’expressionde l’échelle d’apparition d’une région x dans l’équation (10) :
λ+(x) = − D(x) − D(P)
S(x) − S(P),
dans laquelle nous avons remplacé l’énergie de régularisation C par S l’énergied’a priori spatial.
Le dénominateur �S = S(x) − S(P) représente le coût de la fusion au sens del’énergie spatiale des régions composant la partition P en une seule région x. Plus cecoût est faible et plus l’apparition de la région x est retardée.
Segmentation multi-échelle 497
(a) (b)
Figure 3. Image de synthèse et image de synthèse avec blob
Cocquerez 28/02/12 13:08 Page 497

Le tableau 1 présente les énergies spatiales mono-potentielles des 3 rectanglesgris et du rectangle blanc, les énergies de leur union et le coût de chaque fusion. Lecoût de la fusion |��S(g1,b)| est le plus faible parmi les coûts de fusions possiblesentre les rectangles gris et le rectangle blanc. Il y a donc une forte attraction de g1(petit rectangle gris g1 entouré par un blob) vis à vis du blob. Par contre l’énergiespatiale du grand rectangle est la plus forte indiquant une faible attraction entre larégion et le blob. La fusion du rectangle g1 avec le rectangle blanc sera plus fortementpénalisée par rapport aux autres fusions. Par conséquent, l’échelle d’apparitionλ+(g1) du rectangle gris g1 sera élevée. En conclusion, un coût de fusion spatialfaible se traduit par une pénalisation plus forte sur l’apparition de la région tandisqu’un coût de fusion spatial élevé encourage la fusion de la région avec ses régionsvoisines. Dans le schéma « ensemble-échelle » classique, la première fusion absorbele plus petit des rectangles gris g1 avec le rectangle blanc mais avec l’a priori spatialle rectangle g1 fusionnera après la fusion des autres rectangles, g2 et g3.
498 Traitement du signal. Volume 28 – n° 5/2011
Sg1 g2 g3 b
0.633425 60.2683 150.787 80.655
Sg1 ∪b g2 ∪b g3 ∪b
33.6875 78.7556 93.4526
| DS |(g1 , b) (g2 , b) (g3 , b)
47.6009 62.1677 137.9894
Tableau 1. Différents résultats de calcul de l’énergie spatiale mono-potentielleobtenus sur l’image de synthèse de la figure 3
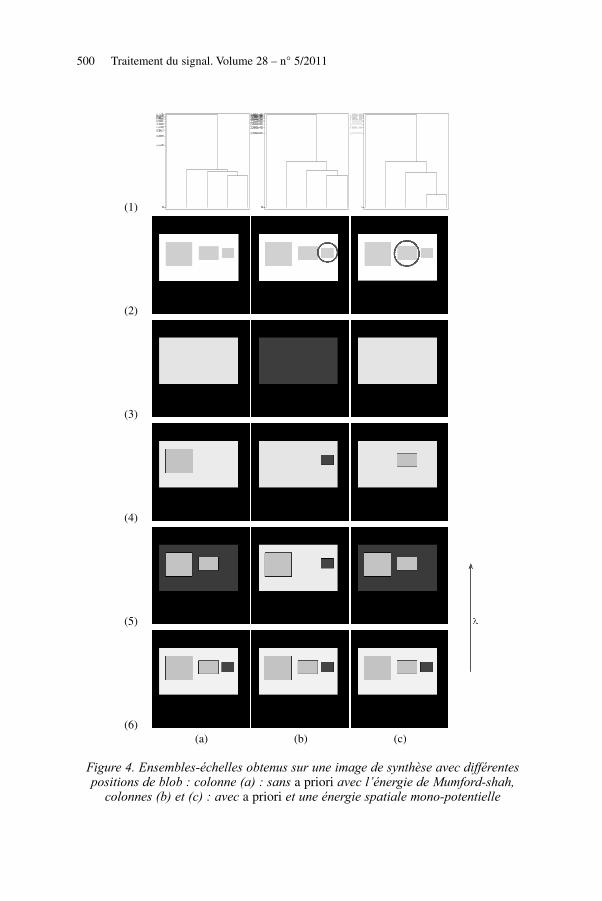
La figure 4 représente les ensembles-échelles obtenus sur cette image desynthèse. La première colonne représente l’ensemble-échelle obtenu avec l’énergiede Mumford-Shah. Les coupes successives de la hiérarchie sont présentées dansl’ordre inverse des fusions, de haut en bas. On explore la hiérarchie du détail le plusgrossier au détail le plus fin. On constate que la construction hiérarchique respectel’échelle spatiale des rectangles contenus dans l’image. Ainsi le petit rectangle est lepremier à disparaître de la hiérarchie, il s’en suit la fusion du rectangle de tailleintermédiaire puis celui qui a la taille la plus grande. Ce comportement est tout à faitsatisfaisant et conforme au formalisme développé dans (Guigues et al., 2006) à savoirun outil d’analyse en échelle du contenu de l’image. Maintenant, supposons quel’objet d’intérêt principal est le plus petit des rectangles comme le montre l’image-blob 4-(2)-(b). La deuxième colonne représente l’ensemble-échelle obtenu encombinant (cf. § 6.1.2) l’énergie radiométrique de Mumford-Shah et l’énergiespatiale mono-potentielle basée sur le potentiel attractif (rapport entre la distance
Cocquerez 28/02/12 13:08 Page 498

euclidienne et le produit des surfaces de la région et du blob). On observe, dans cecas, que le dernier rectangle fusionné est le petit rectangle. À l’exception de cechangement dans l’ordre de fusion, les priorités des fusions sont respectées entre lesdeux rectangles restant, à savoir dans l’ordre croissant de la taille de l’objet. Dans ladernière colonne, on a encerclé le rectangle de taille moyenne et on relève le mêmecomportement que celui noté sur la première image-blob.
Cet exemple simple montre clairement le rôle de l’énergie spatiale dans laconstruction hiérarchique. Ainsi, l’utilisation d’une énergie spatiale à la place del’énergie de régularisation de Munford-Shah confère à un objet circonscrit (par unblob) un degré de pertinence plus élevé. L’énergie élève cet objet dans la hiérarchiedes échelles et rend sa fusion avec une autre région plus difficile. Cette énergiepermet aussi de se focaliser sur cet objet en fusionnant dans un premier temps lesrégions qui se trouvent en dehors du blob. En somme, l’énergie bouleverse l’ordrepré-établi de la pertinence des objets. Cet ordre était au départ guidé par la taille desobjets, autrement dit par l’échelle spatiale des régions 2.
La figure 5 montre les différentes séquences de partitions obtenues avec uneénergie spatiale utilisant une fonction faiblement sur-additive différente à chaque
ligne (respectivement dans l’ordre |R ∩ B|/|R|, e|R∩B|
|R| et e|R||B| . Le comportement
global est le même que celui relevé dans la figure précédente à savoir l’objet entourépar le blob devient plus pertinent que les objets de taille plus grande. Néanmoins, lesdeux premiers potentiels pseudo attractifs qui s’écrivent en fonction du degréd’inclusion de la région dans le blob n’attribuent pas d’importance à l’ordre de fusionentre les deux rectangles restants. Les deux objets sont fusionnés en même tempsavec leur environnement direct (le rectangle blanc). Un phénomène d’inversion s’estproduit lors de l’optimisation finale de l’escalade binaire où l’énergie spatiale n’a pasaccordé une priorité plus forte à l’un ou l’autre des deux rectangles.
À présent, nous allons étudier le comportement de cette énergie spatiale sur uneimage réelle comportant plusieurs objets pertinents. La figure 7 représente uneportion d’autoroute dans un centre ville. L’image comporte des objets de différentestailles : une voiture, une chaussée marquée par des lignes blanches, des panneauxindicateurs. Nous nous sommes focalisés sur le panneau indicateur en haut à droite.7-(a)-(2) . La première ligne comprend les images originales.
Pour illustrer l’intérêt de l’a priori spatial par rapport à l’approche « ensemble-échelle » sans a priori avec une énergie de type Mumford-Shah, nous avons comparédans chaque hiérarchie des coupes horizontales de 20, 40, 60 régions. Les partitionsobtenues dans chaque colonne apparaissent dans l’ordre décroissant du nombre derégions de haut en bas de chaque colonne. La première colonne correspond auxrésultats obtenus sans a priori, la deuxième colonne correspond aux résultats obtenusavec un a priori spatial et une énergie spatiale mono-potentielle (attractive)s’appuyant sur la fonction faiblement sur-additive |R| · |B|. On constate ainsi dès lapremière image à 20 régions que l’a priori spatial (colonne de droite) permet
Segmentation multi-échelle 499
2. En toute rigueur, l’approche ensemble-échelle intègre l’échelle spatiale des objets à traversl’énergie d’attache aux données. Elle intègre également l’échelle de l’axe radiométrique(niveaux de gris) dans cette même énergie.
Cocquerez 28/02/12 13:08 Page 499
500 Traitement du signal. Volume 28 – n° 5/2011
(1)
(2)
(3)
(4)
(5)
(6)(a) (b) (c)
Figure 4. Ensembles-échelles obtenus sur une image de synthèse avec différentespositions de blob : colonne (a) : sans a priori avec l’énergie de Mumford-shah,
colonnes (b) et (c) : avec a priori et une énergie spatiale mono-potentielle
Cocquerez 28/02/12 13:08 Page 500

Segmentation multi-échelle 501
(1)
(2)
(3)
Figure 5. Suites de coupes monotones obtenues avec différentes énergies spatialesmono-potentielles calculées avec différentes fonctions. Ligne (1) : fonction
|R ∩ B|/|R|, ligne (2) : fonction faiblement sur-additive e|R∩B|/|R| , ligne (3) :fonction e|R|/|B|
(1)
(2)
(3)
Figure 6. Suites de coupes monotones obtenues avec différentes énergies spatialesmono-potentielles calculées avec différentes fonctions. Ligne (1) : fonction
|R ∩ B|/|R|, ligne (2) : fonction faiblement sur-additive e|R∩B|/|R| , ligne (3) :fonction e|R|/|B|
Cocquerez 28/02/12 13:08 Page 501

502 Traitement du signal. Volume 28 – n° 5/2011
(a)
(∼ 20)
(∼ 40)
(∼ 60)
(1) (2)
Figure 7. Coupes dans la hiérarchie ensemble-échelle d’une image d’autoroutesans et avec a priori spatial : première ligne : images originales sans blob, avec unblob rectangulaire autour d’un panneau. En face de chaque ligne figure le nombre
de régions des partitions
Cocquerez 28/02/12 13:08 Page 502

Segmentation multi-échelle 503
d’extraire les détails dans la région d’intérêt qui est délimitée par le blobrectangulaire tracé autour du panneau. Inversement, dans la colonne de gauche lapartition de 20 régions n’exhibe pas les chiffres et les lettres dans le panneau. Enl’absence d’a priori spatial, les chiffres commencent à apparaitre dans la partition à40 régions, alors qu’ils sont pratiquement tous présents dans la partition à 40 régionsavec a priori spatial. Si on compare les valeurs de λ, on constate que la partition de20 régions avec a priori est obtenu pour λ = 0,46 alors qu’elle est obtenue avec unλ = 0,209 sans a priori. Comme plus λ est important, plus l’image est régularisée,ces valeurs illustrent le fait qu’avec a priori, en dehors du blob, l’image est plus « simplifiée » que dans le cas sans a priori.
6.1.2. Combinaison linéaire d’énergies sous-additives
Dans les essais précédents, l’énergie spatiale remplace terme pour terme l’énergiede régularisation de Mumford-Shah qui n’est autre que le périmètre. Ainsi laconstruction de la hiérarchie se base uniquement sur la radiométrie de l’image et l’apriori spatial. Aucune information « a priori » sur les contours n’a été introduite d’oùparfois un aspect irrégulier des frontières obtenues. Or, l’énergie de régularisation deMumford-Shah permet d’obtenir des frontières beaucoup plus lisses etconséquemment elle permet de construire des régions de formes moins complexes.
Pour utiliser cette propriété, nous avons inclus dans notre algorithme desegmentation, la possibilité de combiner linéairement les deux énergies sous-additives (spatiale et Mumford-Shah) comme indiqué ci-dessous.
LEMME 3. — Soient C1,C2,. . . ,CL une famille de régions sous-additives et soientβ1,β2,. . . ,βL des nombres réels positifs tels que
∑Li=1 βi = 1 alors toute
combinaison linéaire des énergies C = ∑Li=1 βi .Ci est une énergie sous-additive.
Dans notre cas la nouvelle énergie s’écrira β S + (1 − β) L tel que β ∈]0,1[.Toute la difficulté réside dans le choix du paramètre β qui jouera un rôle depondération entre les deux énergies.
Dans (Yousfi, 2008), nous avons conduit différentes expérimentations sur desimages en modifiant le paramètre β légèrement et de manière croissante.
Par exemple, quand on fixe le paramètre de pondération β à 0.8 on donne ainsiun rôle prépondérant à l’énergie spatiale dans la conduite du processus de fusion. Onobtient des partitions dont les frontières sont plus sinueuses que ses homologuesobtenues avec un coefficient plus faible. La contrepartie se traduit par des partitionsexhibant une description plus détaillée de la zone étudiée. On dira que c’est le prix àpayer si l’on souhaite obtenir des partitions de plus faible cardinalité et contenant desobjets d’intérêt complexes qui auraient du être absorbés par leur environnement à desniveaux plus bas si l’on n’avait pas inclut un a priori spatial.
6.1.3. Énergie spatiale multi-potentielle
L’énergie multi-potentielle d’une région, relativement à un blob B, inclut lepotentiel des régions voisines tandis que l’énergie mono-potentielle ignore lespotentiels des régions adjacentes. La prise en compte du voisinage d’une région,
Cocquerez 28/02/12 13:08 Page 503

incluse dans un blob, induit un comportement de fusion local variable. Si la régionest entourée de régions incluses dans le blob alors sa fusion est accélérée. À l’inverse,si la région possède un voisinage de régions qui se trouvent à l’extérieur du blob alorsla région sera absorbée par ces régions et par conséquent certaines structures d’intérêtseront fusionnées plus rapidement que dans le cas mono-potentiel. Dans nosexpérimentations, nous avons relevé des différences minimes entre les résultats avecénergie mono-potentielle et énergie multi-potentielle.
6.1.4. Énergie spatiale bi-potentielle
Pour terminer le cas de figure où l’a priori spatial porte sur un seul blob, nousavons testé le comportement d’une énergie bi-potentielle lors de la constructionhiérarchique.
Nous avons utilisé un bi-potentiel multiplicatif construit à partir de la distancemétrique de lien minimum :
dmin(R,B) = minx∈R
{d(x,cB)},
tel que d est la distance euclidienne classique.
Cette distance a été combinée avec les fonctions supra-additive suivantes :
– δs(R,B) = 1|R||B|,
– δs(R,B) = 1(1+|R∩B|) ,
– δs(R,B) = e− |R||B|,
– δs(R,B) = e− |R∩B||R| .
Nous avons fait le parallèle entre les coupes obtenues avec une énergie mono-potentielle et celles issues de l’énergie bi-potentielle. La fonction supra-additiveutilisée dans l’énergie bi-potentielle est l’inverse de la fonction faiblement sur-additive utilisée dans l’énergie mono-potentielle.
La différence est plus notable dans la figure 8 où les coupes issues de l’énergiebi-potentielle décrivent l’objet avec plus de détails que les coupes issues des autresénergies bi-potentielles. La fonction supra-additive utilisée est 1/(|R ∩ B| + 1)combinée avec la distance du lien minimum. L’exploration en profondeur de lahiérarchie à partir du sommet donne l’impression que l’on se focalise dans unpremier temps uniquement sur l’objet circonscrit. À chaque tranche de 20 régions onvoit apparaître davantage de structures de la zone étudiée par rapport aux coupesextraites de hiérarchies construites avec une énergie mono ou bi-potentiellequelconque. Le reste des zones d’intérêt qui compose l’image est très vite absorbé.La fusion paraît asynchrone puisqu’une partition de 80 régions sur-segmente l’objetd’intérêt tout en sous-segmentant le reste des régions d’intérêt de l’image. Undéséquilibre se crée entre l’objet étudié et le reste des objets composant la scène.
504 Traitement du signal. Volume 28 – n° 5/2011
Cocquerez 28/02/12 13:08 Page 504

Segmentation multi-échelle 505
(a)
(∼ 20)
(∼ 40)
(∼ 60)
(∼ 80)(1) (2)
λ
Figure 8. Coupes dans la hiérarchie ensemble-échelle pour différentes énergies :colonne (1) : énergie mono-potentielle (|R ∩ B|/|R|), colonne (2) : énergie
bi-potentielle utilisant la fonction supra-additive 1/(1 + |R ∩ B|)
Cocquerez 28/02/12 13:08 Page 505

6.2. Cas de plusieurs blobs
Nous allons maintenant étudier le comportement de l’énergie spatiale en présencede plusieurs blobs dans l’image.
L’énergie spatiale issue d’un a priori comportant K blobs se présente sous laforme d’un vecteur d’énergies spatiales relatives à chaque blob, i.e. :
−−−−−→DB(R,.) = {D(R,Bk)}k=1,···,M .
Il nous faut choisir une norme afin de calculer l’intensité du vecteur des énergies,comme il a été précisé dans la précédente section. Nous avons montré dans cettedernière que des normes telles que L2, L1 ou L∞ permettaient de conserver lapropriété de sous-additivité de l’énergie spatiale. Néanmoins, la direction del’attraction n’étant pas prise en considération, l’intensité du vecteur d’attraction nepeut pas suffire pour caractériser correctement l’interaction entre une région et unblob. Une région incluse dans un blob sera caractérisée par une faible énergie spatialerelativement à ce blob tandis que ses autres composantes seront relativement élevées.Le calcul de l’intensité du vecteur, en attribuant le même poids à chaque blob,diminue l’influence de la composante pertinente. L’énergie de la région, supposéeêtre faible afin d’exprimer la forte attraction de la région vis à vis du blob, se trouvebiaisée par les autres composantes du vecteur potentiel. Il en résulte une pénalisationmoins forte sur la fusion de cette région avec ses régions voisines.
Ces inconvénients nous ont conduit à choisir une autre fonction afin de calculerl’intensité du vecteur d’attraction :
DB(R) = min{−−−−−→DB(R,.)} = min
k=1,···,K{D(R,Bk)}
Cette énergie n’est pas sous-additive mais localement, càd à l’intérieur des blobs,elle respecte cette propriété. L’énergie d’une région sera exprimée par sa composanteénergétique la plus faible. Quand cette région est à l’intérieur d’un blob, lacomposante relative à ce blob représentera l’énergie de cette région tandis que si larégion est à l’extérieur du blob, la composante la moins élevée représentera le bloble plus proche de cette région. La sous-additivité sera forcée dans le cas où elle esttransgressée.
6.2.1. Énergie mono-potentielle
L’image synthétique de test utilisée figures 9 et 10 comprend deux rectanglesblancs de même taille dans lesquels sont imbriqués trois rectangles gris de surfacecroissante de gauche à droite. Sur la colonne gauche de la figure 9 les deux blobs d’a priori spatial sont placés sur les petits rectangles, tandis que sur la figure 10, ilssont placés sur un petit rectangle et sur le rectangle moyen. Chaque ligne de chaquefigure représente les premières coupes extraites de la hiérarchie en partant dusommet. Chaque hiérarchie a été obtenue avec différentes énergies spatiales mono-potentielles. Le comportement général est identique à celui décrit précédemment.
506 Traitement du signal. Volume 28 – n° 5/2011
Cocquerez 28/02/12 13:08 Page 506

Segmentation multi-échelle 507
(1)
(2)
(3)
Figure 9. Suites de coupes monotones pour différentes énergies spatiales avec deux blobs et calculées avec différentes fonctions ; ligne (1) : fonction
|R ∩ B|/|R|, ligne (2) : fonction faiblement sur-additive e|R∩B|/|R| , ligne (3) :fonction e|R|/|B|
Ainsi, on retrouve un comportement similaire à celui constaté dans l’exempled’un a priori spatial à un seul blob. Repérer des objets d’intérêt par des blobs etutiliser une énergie spatiale permet la focalisation et l’attribution d’un degré depertinence plus élevé qui font que les régions concernées de l’image persistent lesdernières dans les mécanismes de fusion.
Nous présentons maintenant l’effet de l’énergie spatiale sur une image réelle enprésence d’un a priori contenant plusieurs blobs.
Nous avons choisi pour cela l’image du carrefour traversé par un bus. Ons’intéresse cette fois-ci à deux objets : le premier étant le bus et le deuxièmereprésente une voiture noire visible en haut de l’image. Les deux objets ont deséchelles spatiales très différentes.
La figure 11 représente dans sa première colonne des coupes extraites del’ensemble échelle obtenu avec l’énergie de Mumford-Shah. Comme citéprécédemment, les structures du bus ayant persisté lors du processus de fusion sontdes zones dont la radiométrie est très différente par rapport à leur voisinage. On neretrouve une partie significative des structures composant le bus qu’à partir d’unepartition contenant 80 régions. Concernant la voiture noire elle n’apparaît dansaucune des partitions exhibées dans cette colonne. La deuxième colonne de cettefigure représente les coupes obtenues en utilisant l’a priori spatial contenant un blobentourant le bus. L’énergie spatiale employée utilise le potentiel attractif. Une
Cocquerez 28/02/12 13:08 Page 507

partition de 20 régions décrit le bus aussi bien que la partition de 80 régions obtenuesans a priori. Toutes les coupes de la deuxième colonne exhibent plus de structuresdu bus mais aucune structure de la voiture noire n’apparaît sauf dans la partition de80 régions. La dernière colonne représente les coupes obtenues avec la même énergiespatiale mais en s’appuyant sur les deux blobs comme le montre la figure 11-(a)-(3).On observe que l’introduction d’un second blob a permis de relever la pertinence decet objet. La partition de 40 régions exhibe à la fois une partie importante du bus ainsique la région principale qui délimite la voiture noire. La comparaison visuelle entreles deux dernières colonnes révèle une forte similitude dans le contenu des coupes àl’exception de l’apparition de la structure décrivant la voiture noire.
508 Traitement du signal. Volume 28 – n° 5/2011
(1)
(2)
(3)
Figure 10. Suites de coupes monotones obtenues pour différentes énergies spatialeset 2 blobs ; ligne (1) : potentiel utilisant la fonction |R ∩ B|/|R|, ligne (2) :
utilisation de la fonction faiblement sur-additive e|R∩B|/|R| , ligne (3) : utilisation de la fonction e|R|/|B|
6.2.2. Énergie bi-potentielle
Nous allons maintenant analyser les résultats obtenus en utilisant une énergie bi-potentielle. On se restreindra à l’étude du comportement de cette énergie construitesoit avec la fonction supra-additive 1/(1 + |R ∩ B|) , soit avec la fonction e−|R∩B|/|R|.On utilisera le bi-potentiel multiplicatif. La distance utilisée est celle du lienminimum.
Cocquerez 28/02/12 13:08 Page 508

Segmentation multi-échelle 509
(a)
(∼ 20)
(∼ 40)
(∼ 60)
(∼ 80)(1) (2) (3)
Figure 11. Coupes dans la hiérarchie ensemble-échelle avec un ou deux blobs ;colonne (1) : sans a priori avec une énergie de Mumford-Shah, colonne (2) : avec
une énergie mono-potentielle (|R|.|B|) et un un seul blob, colonne (3) : mêmeénergie mais en ajoutant un deuxième blob
Cocquerez 28/02/12 13:08 Page 509

510 Traitement du signal. Volume 28 – n° 5/2011
(a)
(∼ 20)
(∼ 40)
(∼ 60)
(∼ 80)(1) (2) (3)
Figure 12. Coupes dans la hiérarchie ensembles-échelles avec une énergie bi-potentielle ; colonne (1) : énergie de Mumford-Shah, colonne (2) : énergie
utilisant une fonction supra-additive 1/(1 + |R ∩ B|) , colonne (3) : même énergiemais avec un deuxième blob
Cocquerez 28/02/12 13:08 Page 510

La colonne (2) de la figure 12 représente les coupes extraites de la hiérarchieconstruite avec un bi-potentiel utilisant la fonction supra-additive 1/(1 + |R ∩ B|) .L’a priori spatial introduit contient un seul blob entourant le bus. L’explorationprofonde de la hiérarchie indique que les zones composant le bus sont de plus en plusmorcelées par rapport aux autres régions composant l’image. La fonction supra-additive utilisée impose une forte pénalisation entre régions adjacentes appartenantau blob. Ainsi, les régions se trouvant à l’extérieur du blob sont fusionnées enpriorité. Il est clair que l’on accède ainsi plus rapidement aux régions composant leblob mais on occulte en même temps le reste des régions d’intérêt composantl’image. Le processus de fusion devient asynchrone puisque les régions à l’intérieurdu blob restent sur-segmentées tandis que les objets à l’extérieur du blob sont soitsous-segmentés, soit déjà agrégés avec d’autres régions. Toutes les coupes de lapremière colonne ne contiennent aucun détail sur la voiture noire. La colonne (3) decette même figure construite avec la même énergie spatiale mais sur la base des deuxblobs exhibe, quant à elle, les structures de nos objets d’intérêt dès la partition de20 régions. Le second objet d’intérêt (voiture noire) est préservé de la fusion avecd’autres régions grâce à l’injection d’un nouveau blob.
7. Conclusion
Dans cet article nous avons traité l’une des façons d’introduire des connaissancesa priori. Nous avons proposé d’introduire un a priori spatial sous forme de blobs afinde souligner la pertinence de certaines zones de l’image dans l’interprétation de lascène. À partir d’une image-blob, nous avons proposé de construire une énergiespatiale « sous-additive » afin de respecter le formalisme de la théorie ensemble-échelle. Nous avons exploré différentes manières de modéliser une énergie spatiale :mono-potentielle, multi-potentielle ou bi-potentielle. Toute région sera caractériséepar une énergie spatiale qui se présente sous forme d’un vecteur dans le cas où l’a priori comprend plusieurs blobs. Chaque composante exprimera le degréd’attraction de la région vis-à-vis d’un blob. L’attraction est d’autant plus forte quel’énergie est faible. En présence de plusieurs blobs c’est l’intensité du vecteur desénergies qui représentera l’énergie de la région. Bien que les normes L p soient desapplications qui permettent de préserver la sous-additivité de l’énergie, elles nereflètent pas l’attraction d’une région envers un blob en particulier. Dans le cas oùl’image comporte plusieurs blobs, nous avons utilisé la fonction du minimum quirenvoie la composante énergétique la plus faible. Les différentes expériences menéessur des images de synthèse ou des images naturelles ont montré l’efficacité et le rôled’une telle énergie dans la construction hiérarchique. Une énergie spatiale confèreaux objets circonscrits un degré de pertinence plus élevé, leurs structures résistentaux processus de fusion et persistent plus longuement dans la hiérarchie.L’exploration de haut en bas de la hiérarchie permet de retrouver plus rapidement cesobjets dans des coupes comportant très peu de régions. Le parallèle réalisé avec deshiérarchies construites sans a priori spatial conforte notre idée de départ. Des objetspertinents aux yeux d’un utilisateur peuvent ne pas l’être dans la hiérarchie et seretrouver noyés dans des partitions ayant un grand nombre de régions. L’introductiond’un a priori spatial permet de protéger ces objets et/ou leurs structures de la fusionavec les régions se trouvant à l’extérieur des blobs.
Segmentation multi-échelle 511
Cocquerez 28/02/12 13:08 Page 511

Concernant les différents modes d’énergie, les expérimentations n’ont pas révéléde différence significative entre énergie mono- et multi-potentielle. La prise encompte du voisinage de la région dans le calcul de son attraction vis-à-vis d’un blobdonne lieu à des résultats sensiblement similaires à ceux obtenus avec l’énergiemono-potentielle. Par contre, l’utilisation d’une énergie bi-potentielle montre que lesstructures se trouvant à l’intérieur des blobs sont mieux préservées des fusions avecl’extérieur. Cela est dû à une plus forte pénalisation des fusions entre les structuresinternes au blob, ce qui permet aux régions externes aux blobs de fusionner enpremier.
La construction d’une énergie spatiale exige dans un premier temps le choix d’unmode, c’est-à-dire mono-, multi- ou bi-potentiel. Il faut se munir d’une distancemétrique et d’une fonction supra-additive ou faiblement sur-additive selon le modeénergétique. Expérimentalement, le mode mono- ou bi-potentiel se révèle pluspertinent. Quant à la fonction supra-additive ou faiblement sur-additive, onprivilégiera des fonctions qui prennent en compte le degré d’inclusion de la régionvis-à-vis du blob telle que l’intersection |R ∩ B| ou les ratios |R ∩ B|/|R||R ∩ B|/|B|.
Nous avons relevé durant cette étude que la qualité des frontières était inférieureà celles obtenues avec une énergie de Mumford-Shah. Il serait alors recommandé decombiner deux énergies sous-additives, la première étant le périmètre de la région quifavorisera la construction de contours réguliers et la deuxième sera notre énergiespatiale qui permettra l’émergence d’objets pertinents qui pourraient être fusionnés àcause de leur complexité et de leur faible dissemblance avec leur voisinage.
Dans cet article, nous sommes dans le cadre d’une segmentation interactive où leblob est tracé manuellement. Nous avons aussi utilisé notre algorithme dans lecontexte automatique d’un système embarqué sur un véhicule comprenant deuxcaméras et un radar. Il s’agissait de segmenter correctement la zone susceptible decontenir un piéton. Les caractéristiques du système multi-capteur permettaient detracer un blob rectangulaire dans une image fournie par une des caméras à partir del’écho reçu par le radar. La dimension du blob était donnée par la hauteur probabled’un piéton à la distance fournie par le radar.
Bibliographie
Cocquerez J., Philipp S. (1995). Analyse d’images : filtrage et segmentation, Masson edn,Paris.
Guigues L., Cocquerez J. P., Le Men H. (2006, April). Scale-Sets Image Analyzis,International Journal of Computer Vision.
Haris K., Estradiadis S. N., Maglaveras N., Katsaggelos A. K. (1998). Hybrid imagesegmentation using watersheds and fast region merging, IEEE Trans. on ImageProcessing, vol. 7, n° 12, p. 1684-1699.
Koenderink J. (1984). The structure of images, Biol. Cybern., vol. 50, p. 363-370.
Koenderink J., Van Doorn A. (1999). The structure of locally orderless images, InternationalJournal of Computer Vision, vol. 31, n° 3/2, p. 159-168.
512 Traitement du signal. Volume 28 – n° 5/2011
Cocquerez 28/02/12 13:08 Page 512

Laurent G. (2003). Modèles Multi-échelles pour la Segmentation d’Images (Multi-ScaleModels for Image Segmentation), PhD thesis, Université de Cergy-Pontoise, France, Dec.
Lindeberg T. (1998). Feauture Detection with automatic Scale Selection, Int. J. of ComputerVision.
Mumford D., Shah J. (1989). Optimal Approximations by Piecewise Smooth Functions andAssociated Variational Problems, Comm. on Pure and Applied Math., vol. 17, n° 4,p. 577-685.
Perona P., Malik J. (1990). Scale space and edge detection using anisotropic diffusion, IEEEtrans. on PAMI, vol. 12, n° 1, p. 629-639.
Witkin A. (1983). Scale-space filtering, Proc. of 8th Int. Joint Conf. on Artificial Intell.,Karlsruhe, West Germany, vol., p. 1019-1021.
Yousfi K. (2008). Segmentation hiérarchique optimale par injection d’a priori : radiométrique,géométrique ou spatial, PhD thesis, Université de Technologie de Compiègne,3 novembre.
Article reçu le 02/03/2011Accepté le 02/11/2011
Segmentation multi-échelle 513
Karim Yousfi a effectué ses activités de recherche dans le laboratoire Heudiasyc (UMR 6599du CNRS) de l’université de Technologie de Compiègne. Il a soutenu avec succès sa thèse,intitulée « Segmentation hiérarchique optimale par injection d’a priori : radiométrique,géométrique ou spatial », le 3 novembre 2008.
Jean-Pierre Cocquerez a rejoint depuis 1999 l’université de Technologie de Compiègne et ilest membre du laboratoire Heudiasyc UMR 6599. Depuis 2007, il est responsable du Master« Sciences, Technologie, Santé ». Il est directeur adjoint scientifique de l’Institut des sciencesde l’information et de leurs interactions (INS2I) CNRS depuis avril 2010. Ses domaines derecherche sont la segmentation d’images et la vision par ordinateur.
Cocquerez 28/02/12 13:08 Page 513

Cocquerez 28/02/12 13:08 Page 514