intelligent transportation systems - ieeesites.ieee.org/itss/files/2013/03/v7n3.pdf · editor:...
TRANSCRIPT

INTELLIGENTTRANSPORTATION
SYSTEMShttp://www.ieee.org/its
IEEE ITS SOCIETY NEWSLETTEREditor: Prof. Bart van Arem, [email protected]
Vol. 7, No. 3, September 2005
In This Issue
Society News 3From the Editor . . . . . . . . . . . . . . . . . . . . . . . 3Message from the IEEE ITS Society President . . . . . . 3Calendar of Society Events . . . . . . . . . . . . . . . . . 4Message VP Conferences . . . . . . . . . . . . . . . . . . . 5Message VP Publications . . . . . . . . . . . . . . . . . . 7Last words from a VP Technical Activities . . . . . . . . . 9Message VP Technical Activities . . . . . . . . . . . . . . 102005 IEEE Annual Election . . . . . . . . . . . . . . . . . 11Bookreview . . . . . . . . . . . . . . . . . . . . . . . . . . 14IEEE Trans. on ITS Report . . . . . . . . . . . . . . . . . 15IEEE Transactions on ITS - Index . . . . . . . . . . . . . 17
Conference Reports 20
Technical Contributions 28
Non-Society ITS News 36A Glimpse on the Web . . . . . . . . . . . . . . . . . . . . 36Results of AHS demonstration experiment . . . . . . . . . 37Upcoming Conferences, Workshops and Symposia . . . . . 44
Web Archive
All past issues of this Newsletter can be reached through theSociety’s Official Web Site at: http://www.ieee.org/its
Electronic Newsletter Subscription
To obtain a free short announcement in your e-mail as soon asthe next Newsletter issue is available, please sign in through theSociety Web Site at: http://www.ieee.org/its
ITSC Executive Committee————–
President:Charles J. Herget, [email protected]
President-Elect 2005:Fei-Yue Wang,
. . . [email protected]
Vice President Conferences:Paul Kostek, . . . . [email protected]
Vice President Publications:Emily Sopensky, [email protected]
Vice President Finance:William Scherer, [email protected]
Vice President Technical Activities:Daniel Zeng,
. . . [email protected]
Vice President for Adminstrative Ac-tivities:
Daniel J. Dailey, . [email protected]
————–Transactions Editor:
Alberto Broggi, . . [email protected]
Newsletter Editor:Bart van Arem,
. . . . . [email protected]
Information for contributors————–
Announcements, feature articles, booksand meetings reviews, opinions, lettersto the editor, professional activities, ab-stracts of reports, and other materialof interest to the ITS community is so-licited.
Please submit electronic materialfor consideration in any of the fol-lowing formats: LATEX, plain ASCII,PDF, or Word, to the Editor [email protected] at least 1 monthprior to the newsletter’s distribution:
Issue Due dateMarch February 1st
June May 1st
September August 1st
December November 1st
Permission to copy without fee all or part of any material without a copyright notice is granted provided that the copies are notmade or distributed for direct commercial advantage, and the title of the publication and its date appear on each copy. To copymaterial with a copyright notice requires specific permission. Please direct all inquiries or requests to IEEE Copyrights Office.
1

THEIEEE INTELLIGENT TRANSPORTATION SYSTEMS
SOCIETY——————————————
President: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Charles J. Herget, Alameda, CA 94502, USA
President-Elect 2005: . . . . . . . . Fei-Yue Wang, CAS, China and U. of Arizona, Tucson, AZ 85721, USA
Vice President Conferences: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Paul Kostek, Seattle, WA 98103, USA
Vice President Publications: . . . . . . . . Emily Sopensky, The Iris Company, Arlington, VA 22207, USA
Vice President Finance: . . . . . William Scherer, University of Virginia, Charlottesville, VA 22904. USA
Vice President Technical Activities: . . . . . . . . . . . . . . . . . . Daniel Zeng, University of Arizona, Tucson,
AZ 85721, USAVice President Administrative Activities: . . . . . .Daniel J. Daily, University of Washington, Seattle,
WA 98195, USATransactions Editor: . . . . . . . . . . . . . . . . . . . . . Alberto Broggi, Universita di Parma, Parma, I-43100, Italy
Newsletter Editor: . . . Bart van Arem, University of Twente, Enschede, NL-7500AE, The Netherlands
COMMITTEES
Awards Committee: Chip White (Chair): . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . [email protected]
Conferences and Meetings Committee: Paul Kostek (Chair): . . . . . . . . . . . . . . . . . [email protected]
Constitution and Bylaws Committee: Fei-Yue Wang (Chair): . . . . . . . . . . . [email protected]
Fellow Evaluation Committee: Robert Fenton (Chair): . . . . . . . . . . . . . . . . . . . . . . . . . [email protected]
Finance Committee: Bill Scherer (Chair): . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . [email protected]
History Committee: E. Ryerson Case (Chair): . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . [email protected]
Long Range Planning Committee: Pitu B. Mirchandani (Chair): . . . . . . . . . . . [email protected]
Nominations and Appointments Committee: Fei-Yue Wang (Chair): . . . . . [email protected]
Publications Committee: Emily Sopensky (Chair): . . . . . . . . . . . . . . . . . . . . . . . . . . . . [email protected]
Standards Committee: Jason Geng (Chair): . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . [email protected]
Student Activities Committee: Sudarshan S. Chawathe (Chair): . . . . . . . . . . . . . . . . . [email protected]
Technical Activities Committee: Daniel Zeng (Chair): . . . . . . . . . . . . . . . . . . . [email protected]
RECTIFICATIONIn the first newsletter of 2005, a technical paper ’Rhodes to Intelligent Transport Systems’ was published.Erroneously not all authors were mentioned. The paper ’ Rhodes to Intelligent Transport Systems’ wasauthored by Prof. Pitu Mirchandani and Prof. Fei-Yue Wang. We apologize to the authors and thereaders for the inconvenience.Bart van AremEditor in Chief
2

Society News
From the Editorby Bart van Arem
Dear Readers,
I am pleased to offer you the third Newsletter of the Intelligent Transport Systems Society of the IEEE.In this newsletter you will find a lot of news on conferences and the development of our ITS Society. Wehave reports on the recent conferences on Intelligent Vehicles and Intelligence and Security Informatics. Ourresearch review section focuses on research in Japan.
The email announcement is sent to approximately 10.000 addresses around the world. The March andJune issue were downloaded 1,600 and 850 times this year respectively. We also observe that readers alsotend to download previous issues when a new newsletter is issued.
We have already started new content such as book reviews and reviews of research programs. But inorder to develop the content and appearance of the newsletter even further we want to now the opinion ofour readers. Please take a few minutes time and complete our on-line questionnaire at:
http://www.aida.utwente.nl/en/ITSS Newsletter Survey/
In the December issue of the newsletter we will publish the results. Meanwhile, if you have contributionsthat you would like to share with our readers, do not hesitate to contact us. I hope you will enjoy thisnewsletter.
Bart van Arem
Message from the IEEE ITS Society Presidentby Charles J. Herget
I want to start off by expressing our gratitude on behalf of the Society to Stefano Stramigioli for hismany years of service to both the Council and the Society. Last year, he served as Editor of this Newsletter,and this year he served as Vice President for Technical Activities and he is currently the Program Chair forthis year’s ITS Conference. Earlier this year, Stefano asked to step down from his position as VP TechnicalActivities because of other commitments.
I am pleased to announce that Prof. Daniel Zeng has agreed to take over as VP Technical Activities,and the Board of Governors approved his appointment at its meeting in June in Las Vegas. You can read
3
articles by both Prof. Stramigioli and Prof. Zeng elsewhere in this Newsletter.
The ITS Society is governed by a Board of Governors (BoG) that consists of fifteen elected members andnine officers of the Society. Starting this year, members of the Society will elect five members to the BoG fora three-year term. All of the current elected members of the BoG were elected last year the ITS Council’sAdministrative Committee. This year will be the first time the members of the Society elect their represen-tatives.
The Nominations and Appointments Committee has come forward with an excellent slate of candidates.The nominees (named in random order) are Benjamin Coifman, Takaaki Hasegawa, Hsinchun Chen, SteveE. Watkins, Sudarshan S. Chawathe, Brian K. Johnson, Katsushi Ikeuchi, Petros Ioannou, Ka C. Cheok,and Jason Geng. Members of the Society should have received their ballot from IEEE by now or will receiveone soon. Please be sure to vote. Ballots are due back at IEEE no later than October 14, 2005.
The Board of Governors elects the officers of the Society. Starting in 2006, there will be nine officers.The present officers were elected by the ITS Council’s Administrative Committee. All of the officers areelected to a two-year term except for the president. The president is elected to serve a one-year term aspresident-elect before serving a two-year term as president and then serving another one-year term as past-president. The terms of the other officers are staggered so that each year four officers are elected to begintheir term on January 1 of the following year.
The next election of officers will be held at the Board of Governors meeting in Vienna on September 17,following this year’s ITS Conference.
The officers to be elected are the Vice Presidents for Conference Activities, Member Activities, and Publi-cation Activities and the Editor-in-Chief of the Transactions on ITS.
I am always interested in hearing if there are any suggestions for improving the operation of the Soci-ety or if there are any other activities that you think the Society should be undertaking. Please send me anemail at [email protected] if you have any comments.
Charles Herget President, IEEE Intelligent Transportation Systems Society
Calendar of Society Events
by Daniel J. Dailey
Up Coming events for ITSS:
ITS Society Meetings:
IEEE ITS Society Board of Governors Vienna, Austria September 17,2005
IEEE ITSC 2005 September 13-16, 2005 Vienna, Austria Chair: Reinhard Pfliegl - [email protected] Chair: Stefano Stramigioli
4
IEEE VES’05 October 15-17, 2005 Xi’an, Shanxi, China Chair: NanNing Zheng - [email protected] Chair: FeiYue Wang
IEEE IV’06 June 13-16, 2006 Tokyo, Japan Chair: Katsushi Ikeuchi - [email protected] ProgramChair: Hideki Hashimoto, Mohan Trivedi, Christian Laugier
IEEE ITSC 2006 September 17-20, 2006 Toronto, Canada Chair: Baher Abdulhai - [email protected] Chair: Issam Kayssi
IEEE IV ’07 Istanbul, Turkey Chair: L. Guvenc - [email protected]
IEEE ITSC 2007 September 29- October 4, 2007 Seattle, Washington, USA Chair: Daniel J. Dailey [email protected] Program Chair: Brian Johnson
IEEE ITSC 2008 Korea Chair: Hungman Kim
IEEE ITSC 2009 October 4-7, 2009 St. Louis, Missouri, USA Chair: Steve Watkins - [email protected]
ITSS Officers and Committees can be found at:http://www.ewh.ieee.org/tc/its/officers.html
ITSS Calendar and Related Events can be found at:http://www.ewh.ieee.org/tc/its/calendar.html
Web Pages for past, present and future Conferences:http://www.ewh.ieee.org/tc/its/conf.html
Update your IEEE membership to include ITSS at: http://www.ieee.org/itss and click Update
Message from the VP for Conferencesby Paul Kostek
Since I last wrote we have held a very successful IV05 in Las Vegas and ISI 05 in Atlanta. Reports onIV05 and ISI 05 are included in separate articles in this Newsletter.
With our growing list of conferences, a Conference Calendar has been created, is included in this newsletterand posted on the ITSS Website. It also will be included in the Transactions. This calendar provides thedates, locations and contacts for our Conferences.
At the last BoG meeting, the Board selected Istanbul, Turkey as the site for IV07. The Chair will beProfessor Levent Guvenc: [email protected]. Bids are now being accepted to host IV08. If you areinterested in bidding to host IV08 please contact me at [email protected].
5

The BoG also selected St. Louis, Missouri as the site for ITSC09. Dr. Steve Watkins: [email protected] be the Conference Chair. Our ITS Conferences are now scheduled through 2009. The 2010 ITSC willbe held in North America and if you are interested in bidding to host the Conference please contact me.
The IEEE International Conference on Intelligence and Security Informatics was held May 19-20 in Atlanta,Georgia and had over 600 attendees. This was the first time ITSS served as the sponsor of ISI. Planninghas begun for next year’s Conference to be held in California. Daniel Zeng: [email protected] isthe contact for ISI.
ITSC05 will be held in Vienna, Austria September 13-16. The Preliminary Program, along with regis-tration information, has been posted on the Conference Website: http://www.itsc2005.at/. The GeneralChair of the Conference is Dr. Reinhard Pfliegl: [email protected].
The fourth Conference ITSS is sponsoring this year is the IEEE International Conference on VehicularElectronics and Safety. It will be held October 14-18, 2005 in Xi’an, Shaanxi Province,China. The Gen-eral Chair for the Conference is NanNing Zheng: [email protected]. You can learn more at:https://150.135.155.192/ves05/index.php.
IV06 will be held June 13-15 in Tokyo, Japan. The General Chair of IV06 is Katsushi Ikechi:([email protected]. The Call for Participation and additional information is available at:http://www.cvl.iis.u-tokyo.ac.jp/iv2006/.
ITSC06 will be held September 17-20 in Toronto, Canada and planning is underway. The contact forITSC06 is Baher Abudalli:[email protected] and the ITSC06 Website is:http://www.itsc2006.org. The Conference Call for Participation will be available soon.
Information on the 2006 ISI and VES Conferences will be provided as soon as it is available. Watch theITSS Website for the latest.
ITSC07 will be held September 30-October 3 in Seattle, Washington. The contact is Dan Daily:[email protected].
If you have any questions about any of the ITSS sponsored conferences, feel free to contact me. If youare interested in hosting one of our Conferences please contact me and I will provide you with informationon how to prepare a bid.
6
Message from the VP for Publicationsby Emily Sopensky
Research: What interests you?
Most of you know that ITSS is a new society within the IEEE congregation of engineering focused or-ganizations. Many of you are familiar with the predecessor to the ITSS, the ITS Council, which five yearsago introduced the IEEE Transactions on Intelligent Transportation Systems. More than a few of you havesearched our archives to find the latest research on ITS.
The IEEE ITSS Transactions on Intelligent Transportation Systems serves a dedicated readership. Formembers of our society, electronic access to the transactions is free. Smart researchers also have knownwhere to turn for up-to-date coverage of ITS research. To give you an example of what our membership wasinterested in during the 2004 4th quarter, here is a list of the top 10 articles downloaded.
7

Transactions Editor-in-Chief Professor Alberto Broggi is constantly shaping and building the Transactionsto reflect the best research available in ITS. His tireless, hard-working efforts have resulted in our Boardof Governors approving two increases in the number of pages that will appear in the Transaction per year.That means more first-rate, peer-reviewed papers will be available to you as an IEEE ITSS subscriber.
Online Accessibility Improves with IEEEXplore
IEEE continues to add online accessibilty to its many technical periodicals, papers and articles. IEEEx-plore, IEEE’s vehicle for accessing papers electronically, is constantly being improved. Read more on thenext page. We’re happy that ITSS is able to be part of the constant improvement of IEEExplore thatprovides you with more and better access to papers online.
Please let us know if there is an area of ITS research that you would like to read more about. Emailme at [email protected] or Prof. Broggi at [email protected].
8

IEEE Articles Available Through New Yahoo Service
Researchers can now use a new search engine called Yahoo Search Subscriptions to find papersfrom the IEEE and other subscription-based publishers. Previously, people who needed IEEE paperscould use only IEEE Xplore, the institute’s document-delivery platform. That’s because IEEE articlesare part of the ”deep Web,” which includes millions of access-restricted Web sites that typical Internetsearch engines cannot access. To locate this type of material, you’d have to visit and search several sitesacross the Internet to perform a comprehensive search.
The new Search Subscriptions search engine offers an alternate way to find and access the con-tent of personal subscriptions. Users simply go to the Yahoo Search Subscription Web site, check off”IEEE publications,” type in the title, subject, or author of what they want, and they’ll be takenstraight to a list of relevant articles. Those who have subscriptions to the publications can go furtherand access the articles they find by logging in with their user I.D. and password. Those without suchsubscriptions can choose to purchase the articles.
Yahoo Search Subscription users can also expand their queries to include results from any of theparti-cipating publishers. This feature shortens the time it would usually take to conduct a separate search ofeach publisher’s database, and it provides the ability to compare documents found in different databases.
The IEEE is one of several subscription-based publishers whose content is now available throughthis free Yahoo feature, which is still in a beta, or test, version. Other participating publishers includeThe Wall Street Journal, Financial Times, and Consumer Reports.
Visit Yahoo Search Subscriptions at http://search.yahoo.com/subscriptions.
Other notes
Prof. Bart van Arem ([email protected]), the editor of this newsletter, is in the process of broadeningthe content. See his comments and learn the results of the survey of the readership he conducted. Contacthim directly if you are interested in helping with the newsletter content.
If you are an IEEE member, don’t forget to vote. Ballots are due by Noon, Nov. 1, 2005.
Last words from a VP Technical Activitiesby Stefano Stramigioli
As the reader of this newsletter you may be have noticed, that I have been succeeded by Daniel Zeng asVP Technical Activities.
After some long thoughts I realized that my other university obligations, other international duties andmy family did not allow me to invest the time ITSS-TAB deserves and I decided to resign. I have been active
9

in the Council and then Society for about six years with different positions and I had the pleasure to see itgrow up to a society.
I want to thank all the colleagues and friends which have made my time as a volunteer in ITSC andthen ITSS a pleasant time and I wish them all and the society to further grow and successfully involvemany academics and industries worldwide. During my short period as VP TAB, I generated some ideas forstructuring the review process of conferences together with a strict relation with Technical Committees andI really hope this goal will be achieved: I am confident that this will improve quality and efficiency of manyactivities.
Thats all friends! I hope to see you all in Vienna for ITSC2005 and to have the opportunity to thankyou all personally.
Stefano
Message from the VP Technical Activitiesby Daniel Zeng
Dear Colleagues,It is a great honor for me to be elected as the VP for Technical Activities of the IEEE ITSS at the
last BOG meeting in June. I would like to take this opportunity to thank my predecessor, Prof. StefanoStramigioli, who has been a tremendous help to me explaining responsibilities of the post, sharing his visionfor organizing and coordinating future ITSS technical activities, and providing operational guidance tofacilitate the transition.
The next 12 months will be critical as our new society is putting in place a formal structure to guidevarious technical activities. Based on a proposal initiated by Prof. Stramigioli, we are in the process ofimplementing a new technical activity board (TAB) structure under the leadership of the VP for TechnicalActivities in close collaboration with the VP for Conference Activities and the VP for Publication Activities.This structure was designed to tackle the issues associated with the increasingly expanding topic coverageof ITS-related research, the growing number of technical conferences under the ITSS sponsorship, and theresulting increased topic variety in submissions to these conferences and the Transactions on ITS. Underthis structure, a number of technical committees are being formed based on subject topics. Each technicalcommittee has a chair and formal members with appointment of at least two years. Technical committeechairs are expected to promote certain areas of ITS research by organizing special sessions at the ITSS-sponsored conferences or editing special sections for the Transactions and the Newsletter. Each technicalcommittee chair is also expected to identify a small number of motivated experts to join a centrally-managedinternational conference program committee, which provides pools of reviewers for ITS-sponsored conferencesfor quality and timely reviews.
Your active participation in these technical committees will be crucial for the success of this new TABstructure. We are hoping that as these technical committees are being established and becoming activeplayers, many ITSS technical functions such as conference promotion, reviewer recruiting, and special topicsession organization, will have a broader and more reliable support base. A particular emphasis of myongoing effort is on establishing technical committees that are interdisciplinary in nature to help raise theawareness and recognition of ITS-related challenges in a broad set of engineering, information technology,and management fields. In future issues of the Newsletter, I will be reporting the status of this reorganizationeffort on an ongoing basis.
We look forward to an exciting and fruitful period of active development and expansion of ITS research.Please drop me an email at [email protected] if you have any suggestions about future ITSS technicalactivities.
10

2005 IEEE Annual Electionby Emily Sopensky
2005 IEEE Annual Election
IEEE is a professional association of over 365,000 electrical and electronics professionals in 150countries. As a member, one of your benefits and rights is to vote in this annual election.
To learn more about this years candidates, visit the IEEE election site,http://www.ieee.org/organizations/corporate/candidates.htm In addition, each candidate for president-elect has a Web site. See:
Leah Jamieson at http://www.ece.purdue.edu/ lhj/IEEE
Gerald Peterson at http://ghpeterson.home.att.net
James Tien at http://www.rpi.edu/ tienj/IEEE/statement.htm
Ballots for the 2005 IEEE Annual Election of officers are being mailed beginning in August. If youare a full IEEE member, you may vote by mail or electronically (see https://www.directvote.net/ieee/).BALLOTS MUST BE RECEIVED BY 12 O’CLOCK NOON, CENTRAL TIME USA (18:00 GMT) ON1 NOVEMBER 2005.
Members of IEEE, please vote!
Leah Jamieson
I thank the Intelligent Transportation Systems Society for this opportunityto talk about my priorities for the IEEE. I also congratulate the Society andyou, the ITSS members, for taking this extra step to be informed voters.
In my position statement http://www.ece.purdue.edu/ lhj/IEEE, I outlinepriorities in four areas:
• Nimbleness in emerging technology areas: The rate of change of tech-nology is accelerating. We must continue to improve our ability to identifynew technologies in the IEEE domain, create new technology communities,and establish ourselves as the place to go for novice-to-expert informationabout new areas.
• Agility in the changing information culture: Publishing is at the heart of both IEEE’s businessand its service to the profession. We must be at the forefront in using technology to enhance accessand use of our publications. Our content and tools must be relevant to students, researchers, engineersand professionals at all stages of their careers, and, increasingly, to the public. We must also plot acourse that reflects the changing economics of publishing.
• Support for engineers throughout their careers: Current estimates put the half-life of engineeringknowledge - the time interval in which half of what an engineer knows becomes obsolete - at five years.Just as IEEE is the preferred source for highest quality technical information, it should also becomethe preferred source for highest quality educational material for lifelong learning and professionaldevelopment.
11

• Global relevance, local needs: IEEE’s structure gives us the opportunity to knit together the globalnature of engineering with an understanding of specific local and regional needs. IEEE must use thisstructure to serve both the global profession and the changing needs of members throughout the world.
The role of the President of IEEE is to combine the strengths of this outstanding organization with avision for how it can meet the challenges of the future. I will bring to the position of President a recordof strong leadership skills and a long history of service to the IEEE. I will be guided by the key principles- strategic focus, teamwork and communication, sound financial models, value of membership, appreciationfor volunteers, value to the profession - in helping IEEE meet the challenges and realize the opportunitiesthat the changing world is presenting us. (Note from the Editor: this section was edited for space by theEiC).
Gerald Peterson
I am honored to be a candidate for the office of IEEE President-elect 2006,and to have this opportunity to share a few brief remarks on my candidacy -please see my web site: http://ghpeterson.home.att.net.
Over 37 years, I have held positions in hardware and software design andengineering management and hold one US Patent in the field of telecommu-nications. In the past 17 years I have specialized in industry global strategicstandardization. I currently hold the position of Senior Manager Emeritus atLucent Technologies Bell Labs.
I hold Electrical Engineering degrees from the University of Washingtonand Rutgers University (both in the USA). I am a member of the Tau Beta PiEngineering Honor Society. In 2001 I was recognized as a ”Who’s Who”in itspublication, THE BENT of Tau Beta Pi. Also in 2001 I received the AmericanNational Standards Institute’s Finegan Standards Medal for leadership in the development and application ofvoluntary standards. In addition to my leadership experience in the IEEE, I have served in elected nationaland international leadership positions that have delivered global technical standards and promoted increasedglobal cooperation.
We live in a time of accelerating change and globalization. The IEEE must respond to and help drivethese changes if it is to continue to be a preeminent technical society. Key among these changes is howthe IEEE delivers value to industry worldwide and, thus, value to the members of the IEEE. Our work andfocus is on technology, which we must carry out while maintaining connection to the real word of marketsand social benefit. The application of a broad range of technologies applicable to the development andimprovement of intelligent transportation systems is clearly a key component of IEEE’s value, now and inthe future.
I know both the importance and the scope of the responsibility of being IEEE President and ChiefExecutive Officer, and if elected I am committed to giving my full time and attention to the office of IEEEPresident in 2007. I appreciate your consideration and welcome your questions, comments, and suggestions.
Thank you,Jerry Peterson [email protected]
James Tien
Let me begin by thanking those of you who collected signatures for my petition candidacy; I am now a2006 IEEE President-Elect candidate because of your hard work!
My vision is for the IEEE to be the ”Global Resource of Choice” for scientific, educational and professionalproducts and services. Consequently, IEEE must offer more global and portable member benefits (to supporta typical career that includes multiple employers); IEEE must meet the continuing education needs of ourmembers (who must update their knowledge base while being on the job); and IEEE must think and act
12

globally for the profession and think and act locally for the members (who have different cultural andprofessional needs).
One concern that will affect ITS and all our technical societies is the issue of”open access”; that is, publications - especially those derived from government-funded research - should be readily available and accessible. Although as aresearcher I can applaud this stance, I am afraid that IEEE’s financial viabil-ity will be irrevocably undermined unless we take immediate steps to changeIEEE’s current financial structure, one that is based on deriving more than50 percent of our revenues on the sale of our publications. Even if open ac-cess does not necessarily imply ”free access”, it is obvious that we must curtailour dependency on publication revenues. We must develop new intellectualproducts and services that can be a source for new revenues. Indeed, in 2003and as the newly elected EAB/VP, I worked with EAB staff and volunteers tolaunch IEEE/Thomson’s forthcoming Expert Now (formerly known as XELL)web-based learning library; it will contain the best of our conference tutorialsand short courses. In addition to meeting our continuing education needs, Expert Now will serve as a newrevenue source and possibly grow to replace the lucrative publication business.
I have the qualifications to continue to help IEEE become the global resource of choice, especially givenmy experience as VP of Publications and as VP of Education. Moreover, as detailed in www.jimtien.com,I have extensive leadership experience and demonstrated excellence, including being elected to the U. S.National Academy of Engineering.
Finally, I humbly ask not only for your vote, but also for your involvement: Together, We Can AdvanceIEEE’s Global Value.
13

Bookreviewby Algirdas Pakstas London Metropolitan University
Book Review: Perspectives on Intelligent Transportation Systems
Reviewed by Sudarshan S. Chawathe, University of Maine
The book Perspectives on Intelligent Transportation Systems (ITS), by Joseph M. Sussman, is a collec-tion of the author’s writings aimed at professional engineers and students interested in a high-level overviewof ITS that includes historical context. The book consists of 22 chapters grouped into five sections.
The first section consists of a single chapter that provides a historical context for ITS, followed by a briefoverview. The historical discussion notes early initiatives such as the European project Prometheus and theJapanese projects AMTICS and RACS, the formation of the Intelligent Vehicle Highway Society (IVHS) ofAmerica and the development of IVHS America’s Strategic Plan in 1992.
The overview notes six functional areas of ITS: advanced traffic manage-ment systems; advanced traveler information systems; advanced vehicle con-trol systems; commercial vehicle operations; advanced public transportationsystems; and advanced rural transportation systems. It stresses the impor-tance of integration and broad, systemic approaches to transportation. In-stitutional issues such as public-private partnerships, organizational change,and the role of academia, are also discussed. The section titled Transporta-tion and Change provides an informative discussion of the changes resultingfrom ITS, comparing them with those resulting from the development of theU.S. Interstate highway system.
The second section comprises three chapters that focus on organizationalissues, regionalism, and the transportation-information infrastructure. Thefirst chapter, one of the larger ones in the book, addresses transportation op-erations, emphasizing organizational and institutional perspectives. Section5 of this chapter, which discusses the needs of a successful operations mis-sion, is noteworthy. The needs are summarized as 3F/3I/3R, indicating thatoperations need to be funded, flexible, focused, integrated, intermodal, information- and customer-based,regional, real-time, and routine. In addition to a comprehensive list of references, this chapter includesseveral sizeable appendices: literature review, companion papers, definitions, and the regional perspective.The second and third chapters in this section briefly addresses deployment concerns, with the latter focusingon the idea of a competitive region.
The third section consists of two chapters that discuss the implications of ITS for the transportation pro-fession and for transportation education. The first chapter describes new challenges in educating transporta-tion professionals in the context of ITS. It emphasizes the six I’s: internationalism, intermodal transportation,information and communication technologies, infrastructure, institutional frameworks, and innovation. Itproposes a framework for transportation education composed of the foundation of transportation fundamen-tals, emphasizing the concept of transportation as a complex system, and the three areas of technology,systems, and institutions that build on this foundation. The chapter describes a T-shaped professional,suggesting breadth in the above areas and depth within a transportation specialty. The second chapterin this section addresses new roles for the transportation faculty, emphasizing the evolution to engineeringsystems. It presents three dimensions of transportation systems: the time scale, the geographic scale, andthe organizational scale. It describes an I-shaped transportation faculty, suggesting domain knowledge intransportation that is unified, codified, and applied to new domains.
The fourth section is a collection of 14 columns originally published as Thoughts on ITS in the ITSQuarterly in the period 1996–2001. These columns address a diverse set of topics, such as ITS and congestion,
14
in Chapter 9, and mega-cities in developing countries, in Chapter 14.The fifth, and final, section comprises three chapters that summarize the current state of ITS and discuss
challenges for the future. The first chapter is based on a 2002 U.S. Department of Transportation reportWhat have we learned about Intelligent Transportation Systems. It discusses achievements and challenges indiverse areas of ITS, such as Arterial Management, Traveler Information Systems, Public Transportation,along with crosscutting institutional and technical issues. It suggests assessing ITS using three dimensions:technology, systems, and institutions. The second chapter is organized around the theme of transitions inthe transportation world. These transitions, 20 in all, provide a succinct and provocative summary of theevolution of the field. Examples include the transition from capital planning to management and operations;the transition from urban to regional scales in planning; and the transition from a supply-side perspective to asupply-demand equilibrium framework to non-equilibrium systems. The final chapter provides a retrospectiveanalysis of the 1991 U.S. ITS Strategic Plan.
Perspectives on Intelligent Transportation Systems
Sussman, Joseph M.
2005, X, 229 p., Hardcover
ISBN: 0-387-23257-5
Publisher’s recommended price: 125 USD.
Report on IEEE Trans. on Intelligent Transportation Systemsby Alberto Broggi
Transactions EiC report, updated Aug 1, 2005
Thanks to the motion approved by TAB, we have the chance to increment the number of printed pagesin 2005; this will reduce the backlog of papers to a minimum. We also increased the yearly page budgetfrom 432 to 512 for 2006 thus providing timely publication of accepted papers. The Editorial Board hasdone a very good job in reducing the time required for the first review; now, this new important step willalso reduce the time required from acceptance to actual publication.
Furthermore, the Impact Factor of our Journal in 2004 increased to 1.104 (in 2003 it was 0.776). In 2004the Trans on ITS ranked:
• 2nd out of 21 journals in the category TRANSPORTATION SCIENCE & TECHNOLOGY
• 7th out of 79 journals in the category CIVIL ENGINEERING
• 60th out of 209 journals in the category ELECTRICAL AND ELECTRONIC ENGINEERING In 2003it ranked 7th, 10th, and 89th respectively.
We have the following special issues/special sections under way:
• special issue connected to IV05 (guest editor: Fei-Yue Wang)
• special issue connected to ICVES05 (guest editors: Nenning Zheng, Hironao Kawashima)
• special issue connected to the ITS World Congress (guest editor: Chip White)
• special issue on Cooperative Intelligent Vehicles (guest editors: Ljubo Vlacic, Toshio Fukuda)
We are still working on the inclusion of multimedia content.Scholar One is very late in delivering the new customized version of their ManuscriptCentral (version
3.3). As soon as it is available, we will test it and will go live after a couple of weeks of successful testing.15
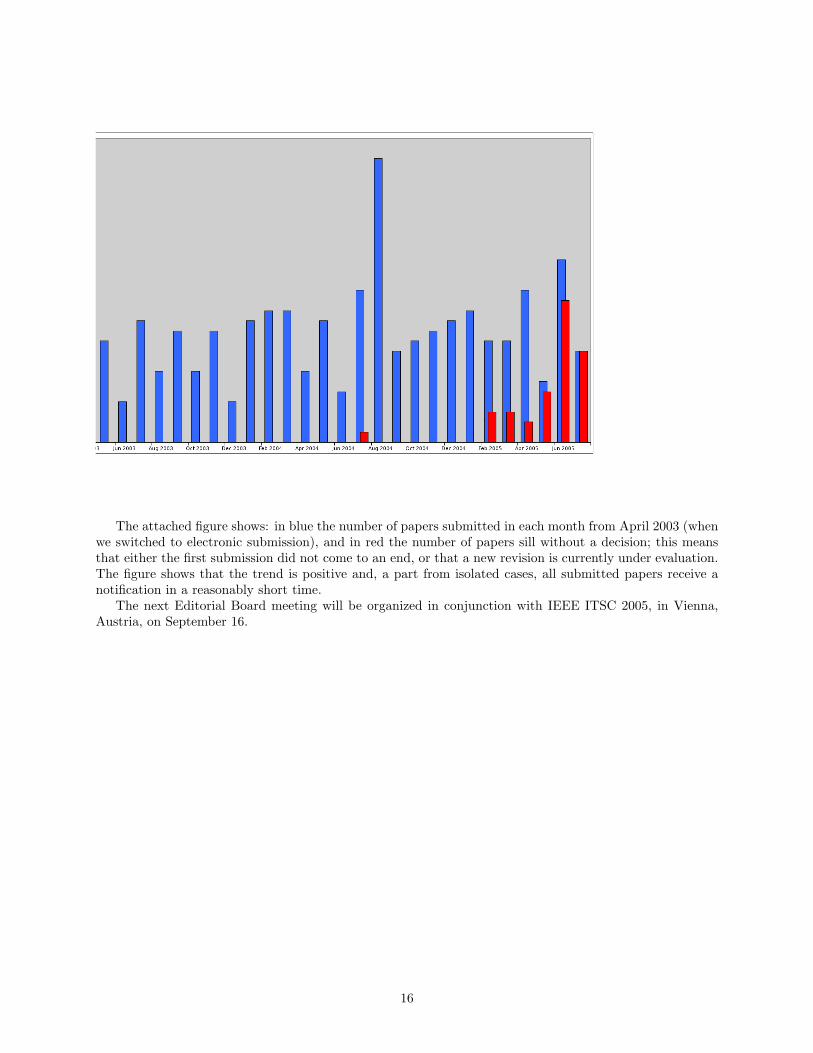
The attached figure shows: in blue the number of papers submitted in each month from April 2003 (whenwe switched to electronic submission), and in red the number of papers sill without a decision; this meansthat either the first submission did not come to an end, or that a new revision is currently under evaluation.The figure shows that the trend is positive and, a part from isolated cases, all submitted papers receive anotification in a reasonably short time.
The next Editorial Board meeting will be organized in conjunction with IEEE ITSC 2005, in Vienna,Austria, on September 16.
16

IEEE Trans. on Intelligent Transportation Systems - Indexby Simona Berte
To go directly to the online Transactions Table of Contents, click on ”Index” above. IEEE ITSS membershave full access to the papers. Non-members can browse the abstracts, which are provided below.
Vol.6, No.3, September 2005
• Real-time Hazardous Traffic Condition Warning System: Framework and Evaluation , byCheol Oh, Jun-Seok Oh and Stephen G. Richie
Abstract: This study presents a warning information system based on an innovate methodologyto estimate accident likelihood in real time. Bayesian modeling approach implemented by theprobabilistic neural network (PNN) is conducted to identify hazardous traffic conditions leadingto potential accident occurrence. The proposed system displays warning signs to call drivers’ at-tention for safer and careful driving once hazardous traffic conditions are observed by evaluatingaccident likelihood. It is believed that the proposed system to produce effective warning informa-tion for real-time safety enhancement could be a valuable tool to highway users and operators.
• State Space Reduction for Non-stationary Stochastic Shortest Path Problems with Real-Time Traffic Information , by Seongmoon Kim, Mark E. Lewis and Chelsea C. White, III
Abstract: Routing vehicles based on real-time traffic conditions has been shown to significantlyreduce travel time, and hence cost, in high-volume traffic situations. However, taking real-timetraffic data and transforming them into optimal route decisions is a computational challenge. Thisis in large part due to the amount of data available that could be valuable in the route selection.We model the dynamic route determination problem as a Markov decision process (MDP) andpresent procedures for identifying traffic data having no decision-making value. Such identificationcan be used to reduce the state space of the MDP thereby improving its computational tractability.This reduction can be achieved by a two-step process. The first is an a priori reduction that maybe performed using a stationary, deterministic network with upper and lower bounds on the costfunctions before the trip begins. The second part of the process reduces the state space furtheron the non-stationary stochastic road network as the trip optimally progresses. We demonstratethe potential computational advantages of the introduced methods based on actual data collectedon a road network in southeast Michigan.
• An Approach to Tune Fuzzy Controllers Based on Reinforcement Learning for Au-tonomous Vehicle Control , by A.B. Rad, Xiahui Dai and C.K. Li
Abstract: In this paper, we suggest a new approach for tuning parameters of fuzzy controllersbased on reinforcement learning. The architecture of the proposed approach is comprised of a Qestimator network (QEN) and a Takagi-Sugeno type fuzzy inference system (TSK-FIS). Unlikeother fuzzy Q-learning approaches that select an optimal action based on finite discrete actions,the proposed controller obtains the control output directly from TSK-FIS. With the proposedarchitecture, the learning algorithms for all the parameters of the Q estimator network and theFIS are developed based on the temporal difference methods as well as the gradient descentalgorithm. The performance of the proposed design technique is illustrated by simulation studiesof a vehicle longitudinal control system.
• A Novel Architecture for Multilane-Free-Flow Electronic-Toll-Collection Systems in Millimeter-Wave Range , by Wern-Yarng Shieh, Wei-Hsun Lee, Shen-Lung Tung and Chung-Ding Ho
Abstract: An architecture for simultaneously performing multi-target tracking and multi-datacommunication suitable for millimeter-wave multilane-free-flow electronic-toll-collection systemsis presented. This architecture combines the idea of frequency multiplexing in communicationsystems and the technique of target tracking in the pulse-doppler radar. For target tracking we
17

make use of pulse ranging by the aid of pulse compression and fine target-direction determinationby amplitude comparison to obtain high resolution in radial direction (down range) as well as bothlateral directions (cross ranges). This architecture can be utilized for both active- and passive-on-board-unit systems. Another important advantage of this architecture is that it can easilyidentify the passing vehicles not equipped with on-board unit. This will activate some subsequentenforcement activities against the violation vehicles.
• In Traffic Jam IVC - RVC System for ITS using Bluetooth , by Akihiko Sugiura and CandraDermawan
Abstract: In the Intelligent Transport Systems field, research continues In-Vehicle Communi-cations, Inter-Vehicle Communications, Road-to-Vehicle Communications etc. All informationcommunications technology, especially radio-communications technology, was applied. This pa-per, to minimize the costs of equipments, simplify a design, equipment, structure of all the systemscommunication for traffic jam area, we proposed to utilize a wireless Bluetooth technology sys-tem. The whole systems we proposed is connected to the Internet backbone provided some accesspoint area, the Internet can be accessed from inside the vehicle and information, such as news andweather information can be downloaded. It is also possible to know traffic information for eachaccess point area by accessing a data center server. Further more we developed Bluetooth-basedIP phone service application. So the whole system, not only for transferring static or dynamicpicture but also for voice communication can be performed.
• Comparative Evaluation of Microscopic Car-Following Behaviour , by Hussein Dia and SakdaPanwai
Abstract: Microscopic traffic simulation tools are increasingly being applied to evaluate the im-pacts of a wide variety of ITS applications and other dynamic problems which are difficult to solveusing traditional analytical models. The accuracy of a traffic simulation system depends highlyon the quality of the traffic flow model at its core, with the two main critical components beingthe car-following and lane-changing models. This paper presents findings from a comparativeevaluation of car-following behaviour in a number of traffic simulators (AIMSUN, PARAMICSand VISSIM). The car-following algorithms used in these simulators have been developed froma variety of theoretical backgrounds and are reported to have been calibrated on a number ofdifferent data sets. Very few independent studies have attempted to evaluate the performanceof the underlying algorithms based on the same data set. The results reported in this study arebased on a car-following experiment which used instrumented vehicles to record the speed andrelative distance between follower and leader vehicles on a one-lane road. The experiment wasreplicated in each tool and the simulated car following behaviour was compared to the field datausing a number of error tests. The results showed lower error values for the Gipps-based modelsimplemented in AIMSUN and similar error values for the psychophysical spacing models used inVISSIM and PARAMICS. A qualitative ”drift and goal seeking behaviour” test, which essentiallyshows how the distance headway between leader and follower vehicles should oscillate around astable distance, also confirmed the findings.
• Aircraft conflict prediction in presence of a spatially correlated wind field , by Jianghai HuMaria Prandini, Shankar Sastry and Jianghai Hu
Abstract: In this paper the problem of automated aircraft conflict prediction is studied fortwo-aircraft midair encounters. A model is introduced to predict the aircraft positions alongsome look-ahead time horizon, during which each aircraft is trying to follow a prescribed flightplan despite the presence of additive wind perturbations to its velocity. A spatial correlationstructure is assumed for the wind perturbations such that the closer the two aircraft the strongerthe correlation between the perturbations to their velocities. Using this model, a method isintroduced to evaluate the criticality of the encounter situation by estimating the probabilityof conflict, namely, the probability that the two aircraft come closer than a minimum alloweddistance at some time instant during the look-ahead time horizon. The proposed method is based
18

on the introduction of a Markov chain approximation of the stochastic processes modeling theaircraft motions. Several generalizations of the proposed approach are also discussed.
• Coordinated Road Junction Traffic Control By Dynamic Programming , by Mark T.K. Ho,Tsan H. Heung and Isaac Y.F. Fung
Abstract: This paper presents a novel approach of road traffic control for interconnected junc-tions. With a local fuzzy logic controller installed at each junction, a dynamic programmingtechnique is proposed to derive the green-time for each phase in a traffic-light cycle. Coordinationparameters from the adjacent junctions are also taken into consideration so that organized con-trol is extended beyond a single junction. Instead of a pursuit of absolute optimization of trafficdelay, this study examines a practical approach to enable simple implementation of coordinationamong junctions while attempting to reduce delays if possible. The simulation results show thatdelay per vehicle can be substantially reduced, particularly when the traffic demand reaches thejunction capacity. The implementation of this controller does not require complicated or demand-ing hardware and such simplicity makes it a useful tool for off-line studies or real-time controlpurposes.
• Lane Keeping Based on Location Technology , by Jin Wang Stefan Schroedl, Klaus Mezger,Roland Ortloff, Armin Joos and Thomas Passegger
Abstract: Vehicle positioning with an accuracy of 10 cm or less will enable lane-keeping assistancein addition to other safety benefits when enhanced lane-level digital map is in place. Withconstantly evolving technology and sensors, a high precision positioning system that fits intothe automotive market can be expected within the next decade. Such a system will incorporateGPS and inertial system (INS) for enhanced positioning performance and availability. In thispaper, the technology fields that will have a significant impact on the deployment of centimetervehicle positioning system will be discussed. Vision based lane recognition systems are relativelymature and have already been introduced to market for lane departure warning etc. However bothsystems have some limitations. GPS/INS based systems may suffer from frequent satellite signalmasking or blockage, while vision based systems do not work well in adverse weather conditionor with poor lane signature. Effectively combining these two technologies can make a robust lanedeparture warning system. A precision map was made for the test area near Stuttgart usingRTNA map-making approach. A Mercedes S-class equipped with both a vision system and a highprecision GPS/INS was used for the test. The positioning map-matching results and the visionoffset are compared and the complementary effectiveness is illustrated.
19

Conference Reports
IVS 05: New Developments and Research Trends forIntelligent Vehicles
Li Li, University of ArizonaJingyan Song, Tsinghua University
Fei-Yue Wang, Chinese Academy of SciencesWolfgang Niehsen, Robert Bosch Corperate Research
Nan-Ning Zheng, Xi’an Jiaotong University
Eight years ago, the US Department of Trans-portation launched the Intelligent Vehicle Initiative,focusing on preventing highway crashes by helpingdrivers avoid hazardous mistakes. This was a sig-nificant new direction for USDOT safety programs,which had previously focused on crash mitigation-that is, alleviating the severity of crashrelated in-juries to people and property. Europe has alsopaid more attention to road safety in recent years;the European Road Safety Action Program aims toreduce road fatalities by 50 percent by 2010 seehttp://www.europa.eu.int/comm/transport/roadsafety/charter en.htm. Further evidence thatdriving safety and driver assistance have becomeworldwide themes appeared in the state-of-art re-search projects presented in June at the 2005 IEEEInternational Intelligent Vehicles Symposium.
The reason behind this shift in focus is sim-ple. According to the USDOT IVI program, inthe US alone, more than 42,000 Americans dieeach year as a result of 6.8 million accidentshttp://www.itsdocs.fhwa.dot.gov/index.htm. Evenfarther reaching is the impact of highway injuries-3 million Americans were injured in 2001. Survivorsoften sustain multiple injuries and require long hospi-talizations. The cost to society is more than US $230billion a year-representing a greater share of the na-tion’s health care costs than any other cause of illnessor injury [1]. The situation is even worse in develop-ing countries. In 2003, more than 104,372 Chinesedied as a result of traffic accidents-on average, 286people die each day [2,3].
Here we discuss several selected topics from IVS05 to provide a broad overview of intelligent-vehicleresearch perspectives and innovative projects. Specif-ically, we focus on advances in vehicle sensing, vehiclemotion control and communications, and driver ass-
sistance and monitoring.
Intelligent-vehicle sensing
Two kinds of intelligent-vehicle sensing discussedat IVS 05 were out-vehicle environment and vehiclestate. (In-vehicle environment is a third type, butsince it primarily relates to a driver’s state, we dis-cuss related research in a later section.)
Out-vehicle environment sensing involves collect-ing information about the driving environment. Hottopics at ISV 05 included
• extracting lane boundaries, especially when notclearly marked or in bad weather conditions;
• detecting nearby vehicles and estimating theirposition, speed, and acceleration;
• recognizing the relevant traffic signs and trafficlights; and
• detecting the unexpected traffic participants(such as pedestrians) and obstacles.
Vehicle-state sensing focuses on measuring a ve-hicle’s movement and monitoring its actuators. Forexample, researchers have studied how to detect
• a vehicle’s position, velocity, and acceleration;• an engine’s pressure and temperature; and• a tire’s pressure, temperature, and friction co-
efficients.
Novel proposals presented at IVS 05 included out-vehicle sensing for bad weather and the integrationof lane detection, vehicle localization, and vehicle-departure monitoring.
20
Out-vehicle environment sensing under adverseweather
CMOS/CCD cameras, FMCW (Frequency Modu-lated Continuous Wave) radar, and LiDARs (light-detection and ranging devices) are the three mostfrequently used surround sensors for out-vehicle en-vironment sensing. However, conventional vision-based pedestrian detection is a difficult task, becausepedestrians usually wear clothes in different stylesand colors and might also carry items such as hats orbags of varied shapes. Moreover, illumination con-ditions and moving cars and bicycles also introducedistortions into the detection process.
To conquer such problems, researchers have ap-plied thermopile and infrared sensors to intelligentvehicle systems. For example, Dirk Linzmeir and hiscolleagues have applied a thermopile sensor to mea-sure an object’s presence in the sensor’s field of view,because objects of interest normally have higher tem-peratures than the environment [4].
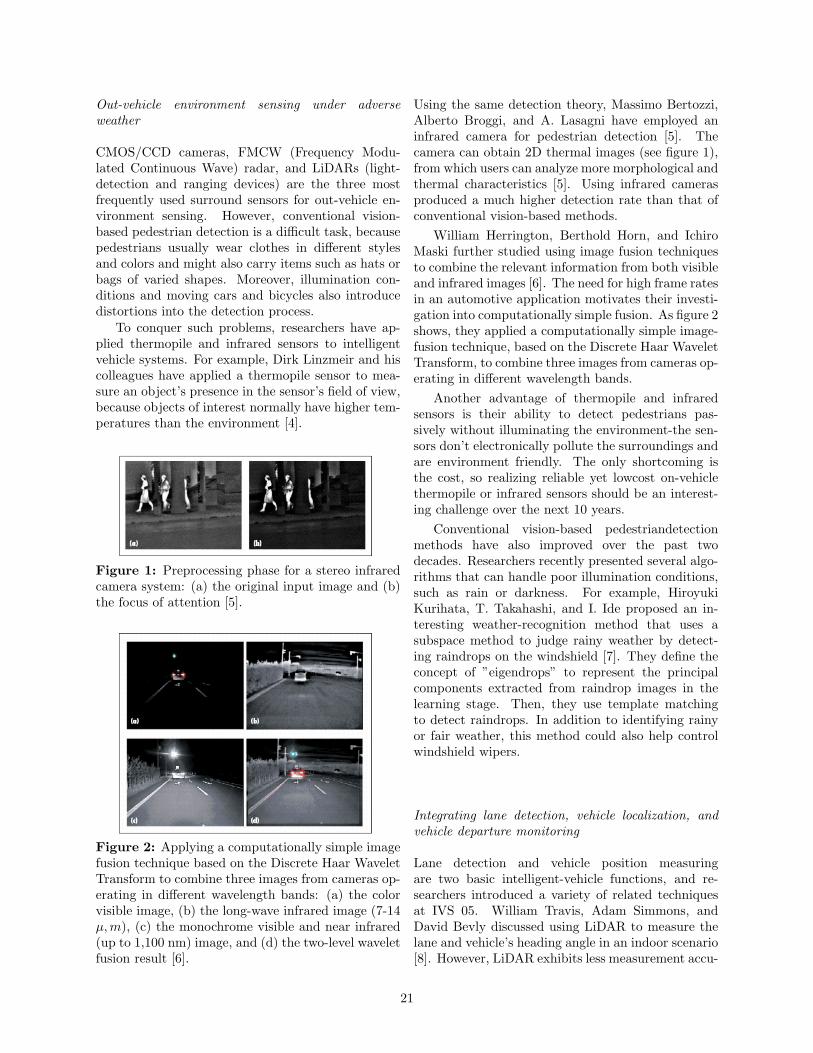
Figure 1: Preprocessing phase for a stereo infraredcamera system: (a) the original input image and (b)the focus of attention [5].
Figure 2: Applying a computationally simple imagefusion technique based on the Discrete Haar WaveletTransform to combine three images from cameras op-erating in different wavelength bands: (a) the colorvisible image, (b) the long-wave infrared image (7-14µ,m), (c) the monochrome visible and near infrared(up to 1,100 nm) image, and (d) the two-level waveletfusion result [6].
Using the same detection theory, Massimo Bertozzi,Alberto Broggi, and A. Lasagni have employed aninfrared camera for pedestrian detection [5]. Thecamera can obtain 2D thermal images (see figure 1),from which users can analyze more morphological andthermal characteristics [5]. Using infrared camerasproduced a much higher detection rate than that ofconventional vision-based methods.
William Herrington, Berthold Horn, and IchiroMaski further studied using image fusion techniquesto combine the relevant information from both visibleand infrared images [6]. The need for high frame ratesin an automotive application motivates their investi-gation into computationally simple fusion. As figure 2shows, they applied a computationally simple image-fusion technique, based on the Discrete Haar WaveletTransform, to combine three images from cameras op-erating in different wavelength bands.
Another advantage of thermopile and infraredsensors is their ability to detect pedestrians pas-sively without illuminating the environment-the sen-sors don’t electronically pollute the surroundings andare environment friendly. The only shortcoming isthe cost, so realizing reliable yet lowcost on-vehiclethermopile or infrared sensors should be an interest-ing challenge over the next 10 years.
Conventional vision-based pedestriandetectionmethods have also improved over the past twodecades. Researchers recently presented several algo-rithms that can handle poor illumination conditions,such as rain or darkness. For example, HiroyukiKurihata, T. Takahashi, and I. Ide proposed an in-teresting weather-recognition method that uses asubspace method to judge rainy weather by detect-ing raindrops on the windshield [7]. They define theconcept of ”eigendrops” to represent the principalcomponents extracted from raindrop images in thelearning stage. Then, they use template matchingto detect raindrops. In addition to identifying rainyor fair weather, this method could also help controlwindshield wipers.
Integrating lane detection, vehicle localization, andvehicle departure monitoring
Lane detection and vehicle position measuringare two basic intelligent-vehicle functions, and re-searchers introduced a variety of related techniquesat IVS 05. William Travis, Adam Simmons, andDavid Bevly discussed using LiDAR to measure thelane and vehicle’s heading angle in an indoor scenario[8]. However, LiDAR exhibits less measurement accu-
21

racy than Inertial Navigation Systems, so the authorscombined the two sensor systems for better results.
Localization is also an important functionality fornavigating intelligent vehicles. However, the data ob-tained from GPS and cameras is sometimes uncertainand or even momentarily unavailable (in urban ar-eas, for example). Frederic Chausse, J. Laneunt, andR. Chapuis studied the problem of GPS and vision-sensor-based localization, which combined GPS abso-lute localization data with data computed by a visionsystem to provide accurate vehicle position and ori-entation measurements [9]. They transform the posi-tion and orientation data into a global reference usinga map of the environment and then estimate localiza-tion parameters using a particle filter. This lets themmanage multimodal estimations, because the vehiclecan be in the left or right lane. The best precisioncan supposedly reach 48 cm along the road axis and8 cm along the axis normal to the road.
Vehicle motion control and communications
Developments in wireless and mobile communi-cation technologies are advancing methods for ex-changing driving information between vehicles androadside infrastructures to improve driving safety andefficiency. The concept of multiple-vehicle coopera-tive driving has also recently emerged as a promisingsolution to traffic congestion.
Motion control
Drivers often can’t see what’s beside or behind theirvehicle, especially when backing up. When parking,for example, the driver might have difficulty deter-mining how close the car is to the curb. Furthermore,most vehicles don’t have rear- and side-view sensorsbecause they’re too expensive and technologicallychallenging. To solve this problem, Yasuhiro Suzuki,T. Fujii, and M. Tanimoto have built an interestingmulticamera system in a parking garage [10]. Thesystem can easily identify a vehicle’s position andsend the information to the driver in real time (seefigure 3).
Other novel parking guidance and monitorprojects aim to collect, record, and share all the infor-mation in the garage, including the vehicle’s licenseplate, available parking bay number, and toll collec-tion.
Figure 3: A parking assistance system using asingle-camera infrastructure [10]. The top imageshows the camera’s view, and the bottom imageshows the driver’s view, including the small screeninstalled beside the steering wheel.
Intersection collisions represent a significant portionof highway accidents, so roadside communicationsto assist drivers has also recently gained much at-tention. A potential solution is to supply driverswith timely alerts of imminent collisions. ChingyaoChan and Benedicte Bougler set up an experimen-tal radar, configured to observe a vehicle’s leftturnmotions with a trajectory (depicted by the yellowturning curve in figure 4)[11]. The subject vehicle inthe figure is initially traveling north and then turningwest. As the figure shows, a left-turn pocket existsfor the subject vehicles. The triangle in the figurerepresents the coverage area of a radar device usedfor monitoring the movements of other vehicles in theopposite direction.
22
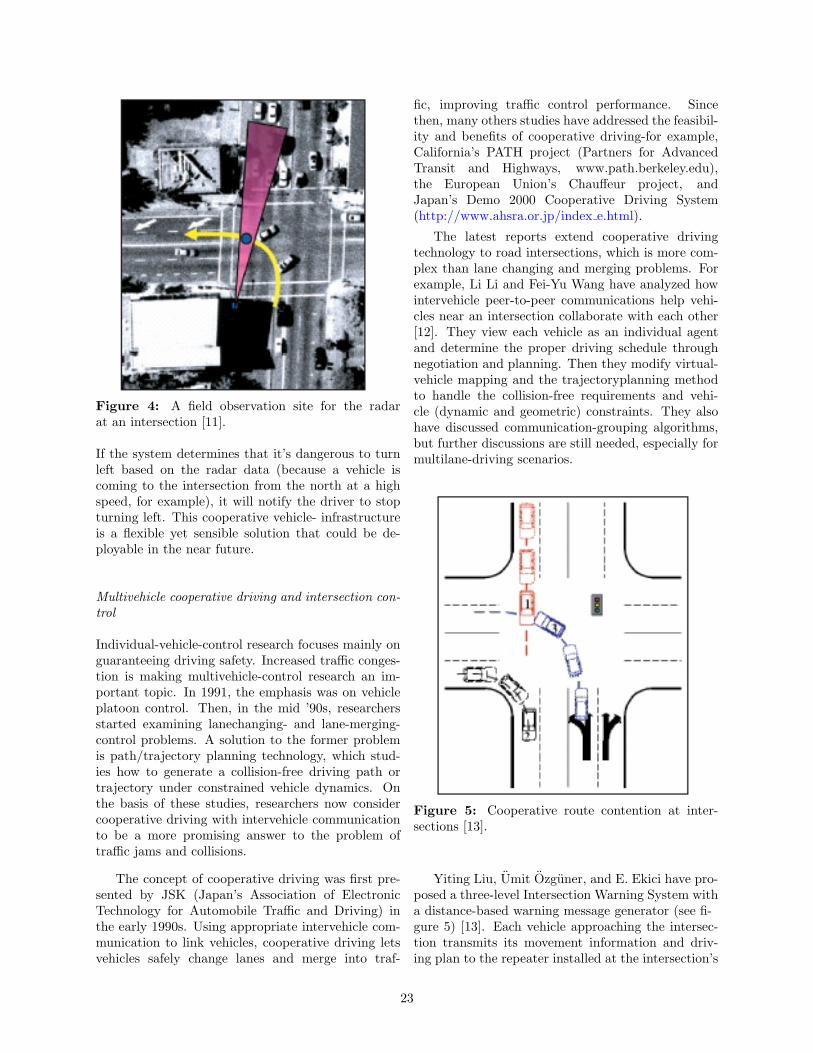
Figure 4: A field observation site for the radarat an intersection [11].
If the system determines that it’s dangerous to turnleft based on the radar data (because a vehicle iscoming to the intersection from the north at a highspeed, for example), it will notify the driver to stopturning left. This cooperative vehicle- infrastructureis a flexible yet sensible solution that could be de-ployable in the near future.
Multivehicle cooperative driving and intersection con-trol
Individual-vehicle-control research focuses mainly onguaranteeing driving safety. Increased traffic conges-tion is making multivehicle-control research an im-portant topic. In 1991, the emphasis was on vehicleplatoon control. Then, in the mid ’90s, researchersstarted examining lanechanging- and lane-merging-control problems. A solution to the former problemis path/trajectory planning technology, which stud-ies how to generate a collision-free driving path ortrajectory under constrained vehicle dynamics. Onthe basis of these studies, researchers now considercooperative driving with intervehicle communicationto be a more promising answer to the problem oftraffic jams and collisions.
The concept of cooperative driving was first pre-sented by JSK (Japan’s Association of ElectronicTechnology for Automobile Traffic and Driving) inthe early 1990s. Using appropriate intervehicle com-munication to link vehicles, cooperative driving letsvehicles safely change lanes and merge into traf-
fic, improving traffic control performance. Sincethen, many others studies have addressed the feasibil-ity and benefits of cooperative driving-for example,California’s PATH project (Partners for AdvancedTransit and Highways, www.path.berkeley.edu),the European Union’s Chauffeur project, andJapan’s Demo 2000 Cooperative Driving System(http://www.ahsra.or.jp/index e.html).
The latest reports extend cooperative drivingtechnology to road intersections, which is more com-plex than lane changing and merging problems. Forexample, Li Li and Fei-Yu Wang have analyzed howintervehicle peer-to-peer communications help vehi-cles near an intersection collaborate with each other[12]. They view each vehicle as an individual agentand determine the proper driving schedule throughnegotiation and planning. Then they modify virtual-vehicle mapping and the trajectoryplanning methodto handle the collision-free requirements and vehi-cle (dynamic and geometric) constraints. They alsohave discussed communication-grouping algorithms,but further discussions are still needed, especially formultilane-driving scenarios.
Figure 5: Cooperative route contention at inter-sections [13].
Yiting Liu, Umit Ozguner, and E. Ekici have pro-posed a three-level Intersection Warning System witha distance-based warning message generator (see fi-gure 5) [13]. Each vehicle approaching the intersec-tion transmits its movement information and driv-ing plan to the repeater installed at the intersection’s
23

Figure 6: The driver assistance system architecture[14].
center. The repeater then forwards or transfers suchinformation to other vehicles and to the IWS. Simul-taneously, the IWS generates the warning messagebased on the received information and broadcasts itto all the vehicles via the repeater.
Driver and passenger assistance
Conventional research has focused on how to makethe drive more comfortable- for example, designingadvanced suspension and chair systems to avoid in-jury and implementing smart air-conditioning con-trollers that adjust the vehicle’s inside temperature.More recent research addresses how to
• monitor and analyze the driver’s state,
• design an advanced vehicle and user interfaceto more effectively exchange information, and
• monitor drivers’ behaviors to study, evaluate,and even mimic driving habits.
Advanced driver assistance systems should beable to ensure that the driver’s reactions are appro-priate and safe.
Monitoring driving behavior
The driver’s diminishing vigilance level has become aserious traffic safety problem. The National HighwayTraffic Safety Administration (NHTSA) estimatesthat, in the US, drowsy drivers cause 100,000 acci-dents each year, resulting in more than 1,500 fatalities
and 71,000 injuries (http://www.aaafoundation.org/resources/index.cfm?button=drowsyfaq). Amongdifferent approaches in this field, monitoring thedriver’s head position has received considerable in-terest. This could help us detect and infer the driver’sfatigue level (especially when combined with a driver-eye-gaze tracking system) and implement a ”smart”airbag.
Luke Fletcher, L. Petersson, and A. Zelinskyhave proposed a novel idea for inferring driver fa-tigue, studying the relationship between road scenemonotony and driver vigilance [14]. Their idea comesfrom a psychology perspective that defines monotonyas an exogenous contributing factor of fatigue. Theypropose an integrated fatigue detection system thatuses driver-head-pose and eyegaze tracking as well asroad monotony analysis (see figure 6). They claimthat this system has better performance than thosethat focus on driver-head-pose and eye-gaze trackingonly.
The NHTSA also pointed out that al-though airbags saved over 6,000 lives bythe end of 2000, they also killed over 200occupants through inappropriate deployment(http://www.iihs.org/safety facts/qanda/airbags.htm). In response, the NHTSA issued a set ofregulations mandating smart airbags that can adaptintelligently to the occupant. The head position al-gorithm must be robust to lighting conditions anduncontrolled driver postures. Infrared cameras canhelp eliminate the disturbance of poor lighting con-ditions. Algorithms can help reject occlusion andthe presence of other competing head-like objects inthe scene. For instance, Stephen Krotosky, ShinkoCheng, and Mohan Trivedi have proposed a special
24

Figure 7: Successful detection for difficult examples: the captured images and the disparity images. Thedetected head location is shown in blue [15].
algorithm to constrain the relative size and disparityof an occupant’s head in order to model and validatethe potential heads in the camera image.15 Resultsof ground truth experiments show that the detectedhead location can accurately estimate the occupant’s3D location. The demo system was robust to harshlighting, partial occlusions, and competing objectssuch as hands (see figure 7).
Advanced user interface design
Intelligent assistance systems can present driverswith more information-for example, using smart tire-monitor sensors. As a result, information displayplacement and viewing methods are also hot top-ics. Bernard Champoux has proposed an interfaceto maximize information representation by collaps-ing many of the separate dashboard controls, dis-plays, and systems into a single multifunction dis-play (MFD) [16]. A more challenging idea he hasproposed is to switch the representation of informa-tion to match different driving situations (city ver-sus highway driving, for example). However, staticdisplays have their own advantages; information isalways in the same place and format. Transferring toMFD will break this rule and introduce learning andusage trouble.
Solving this problem will require significant re-search into driver ergonomics. Also, results fromaviation assistance might be useful.
Examining all these IVS 05 papers suggests thatintervehicle, vehicle-roadside, and vehicle-driver in-formation sharing is currently the most attractivetrend in intelligentvehicle research. Consequently,an important problem we’ll need to solve is settingup communication protocols so that products fromdifferent manufacturers can communicate with eachother. No single company or institution can pro-vide a complete intelligent vehicle, so interoperabil-ity among varied sensors and actuators emerges as agreat new challenge.
Acknowledgments
This work is supported in part by Grants#60125310 and #60334020 from NNSFC.
References
1. F.-Y. Wang, P. B. Mirchandani, and Z. Wang,”The VISTA Project and its Applications,”IEEE Intelligent Systems, vol. 17, no. 6, 2002,pp. 72-75.
2. F.-Y. Wang et al., ”Creating a Digital-VehicleProving Ground,” IEEE Intelligent Systems,vol. 18, no. 2, 2003, pp. 12-15.
3. N.-N. Zheng et al., ”Toward Intelligent Driver-Assistance and Safety Warning Systems,” IEEEIntelligent Systems, vol. 19, no. 2, 2004, pp. 8-11.
25
4. D.T. Linzmeier et al., ”Probabilistic Signal In-terpretation Methods for a Thermopile Pedes-trian Detection System,” Proc. IEEE Intelli-gent Vehicles Symp., IEEE Press, 2005, pp. 12-17.
5. M. Bertozzi, A. Broggi, and A. Lasagni, ”In-frared Stereo Vision-Based Pedestrian Detec-tion,” Proc. IEEE Intelligent Vehicles Symp.,IEEE Press, 2005, pp. 24-29.
6. W.F. Herrington, B.K.P. Horn, and I. Masaki,”Application of the Discrete Haar WaveletTransform to Image Fusion for Nighttime Driv-ing,” Proc. IEEE Intelligent Vehicles Symp.,IEEE Press, 2005, pp. 273-277.
7. H. Kurihata, T. Takahashi, and I. Ide, ”RainyWeather Recognition from In-Vehicle CameraImages for Driver Assistance,” Proc. IEEE In-telligent Vehicles Symp. IEEE Press, 2005, pp.205-210.
8. W. Travis, A.T. Simmons, and D. M. Bevly,”Corridor Navigation with a LiDAR/INSKalman Filter Solution,” Proc. IEEE Intel-ligent Vehicles Symp., IEEE Press, 2005, pp.343-347.
9. F. Chausse, J. Laneurit, and R. Chapuis, ”Ve-hicle Localization on a Digital Map Using Parti-cles Filtering,” Proc. IEEE Intelligent VehiclesSymp., IEEE Press, 2005, pp. 243-248.
10. Y. Suzuki, T. Fujii, and M. Tanimoto, ”ParkingAssistance Using Multi-camera Infrastructure,”
Proc. IEEE Intelligent Vehicles Symp., IEEEPress, 2005, pp. 106-110.
11. C. Chan and B. Bougler, ”Evaluation of Coop-erative Roadside and Vehicle-Based Data Col-lection for Assessing Intersection Conflicts,”Proc. IEEE Intelligent Vehicles Symp., IEEEPress, 2005, pp. 165-170.
12. L. Li and F.-Y. Wang, ”Cooperative Drivingand Lane Changing at Blind Crossings,” Proc.IEEE Intelligent Vehicles Symp., IEEE Press,2005, pp. 435-439.
13. Y. Liu, U. Ozguner, and E. Ekici, ”PerformanceEvaluation of Intersection Warning System Us-ing a Vehicle Traffic and Wireless Simulator,”Proc. IEEE Intelligent Vehicles Symp., IEEEPress, 2005, pp. 171-176.
14. L. Fletcher, L. Petersson, and A. Zelinsky,”Road Scene Monotony Detection in a FatigueManagement Driver Assistance System,” Proc.IEEE Intelligent Vehicles Symp., IEEE Press,2005, pp. 484-489.
15. S. J. Krotosky, S.Y. Cheng, and M.M Trivedi,”Real-Time Stereo-based Head Detection UsingSize, Shape and Disparity Constraints,” Proc.IEEE Intelligent Vehicles Symp., IEEE Press,200, pp. 550-556.
16. B.B. Champoux, ”A Mode of Interaction forDriver Vehicle Interface (DVI),” Proc. IEEEIntelligent Vehicles Symp., IEEE Press, 2005,pp. 795-800.
26

Report on IEEE International Conference onIntelligence and Security Informatics (ISI-2005)
Hsinchun Chen,Daniel Zeng,Fei-Yue Wang
Intelligence and Security Informatics (ISI) can bebroadly defined as the study of the development anduse of advanced information technologies and systemsfor national and international security-related appli-cations, through an integrated technological, orga-nizational, and policy-based approach. In the pastfew years, ISI research has experienced tremendousgrowth and attracted substantial interest from aca-demic researchers in related fields as well as practi-tioners from both government agencies and industry.We held the IEEE International Conference on In-telligence and Security Informatics (ISI-2005) in May2005 in Atlanta, Georgia. This conference was anITSS-sponsored event with technical co-sponsorshipfrom the IEEE SMC Technical Committee on Home-land Security. It provided a stimulating intellectualforum for discussion among previously disparate com-munities: academic researchers in information tech-nologies, computer science, transportation systemsand safety, public policy, and social studies; local,state, and federal law enforcement and intelligenceexperts; and information technology industry consul-tants and practitioners. There were 92 regular paperand 12 poster submissions. About 40% of these sub-missions were from outside of U.S. Acceptance ratefor regular (long) papers was about 40%. The two-day program included one plenary panel discussion
session focusing on the perspectives and future re-search directions of the government funding agencies;and several invited panel sessions including one ontechnical ISI research and community building withCharles Herget and Fei-Yue Wang, the current andnext ITSS Presidents, as panelists. ISI-2005 also in-cluded a track on Terrorism Informatics, which is anew stream of terrorism research leveraging the latestadvances in social science methodologies, and infor-mation technologies and tools.In addition to the main sponsorship from the U.S.National Science Foundation, the Intelligence Tech-nology Innovation Center, and the U.S. Departmentof Homeland Security, the conference was also co-sponsored by several units within the hosting univer-sities including: the School of Communication, In-formation and Library Studies at Rutgers; the Cen-ter for Discrete Mathematics and Theoretical Com-puter Science at Rutgers; the Eller College of Man-agement and the Management Information SystemsDepartment at University of Arizona (UA); the NSFCOPLINK Center of Excellence at UA; the Mark andSusan Hoffman E-Commerce Laboratory at UA; theArtificial Intelligence Laboratory at UA; the Programfor Advanced Research in Complex Systems at UA;the College of Computing at GATECH; and the Geor-gia Tech Information Security Center.
27
Technical Contributions
Bridge Collapse Detection and Motorist WarningSystem
James Justin Mercier, P.E., Senior Member, [email protected]
Robert A. Marshall, Senior Member, [email protected]
I. Introduction
After a bridge span collapses, an unusual haz-ard is created. Approaching motorists often cannotsee the missing span until there is insufficient stop-ping distance, even under ideal visibility conditions,due to the bridge’s vertical curvature. Until someform of human intervention finally stops the flow oftraffic, whether spectators, other motorists, or au-thorities, motorists may proceed into the danger.
A bridge collapse detection and motorist warningsystem that can immediately and automatically warnapproaching motorists of the eminent danger couldsave many lives in the event of a bridge collapse.
Unlike traditional smart structures which providehighly detailed structural information, this system’sgoal is to provide reliable, immediate, and actionableadvice. The requirements of such a system, being asafety system, include a high degree of reliability inboth reporting emergencies and not generating falsealarms. False alarms would quickly undermine pub-lic confidence in the system. Durability and main-tenance simplicity are additional requirements of thesystem. Such a system has been operational on abridge in Texas, USA, since March 5, 2004.
II. Motivation
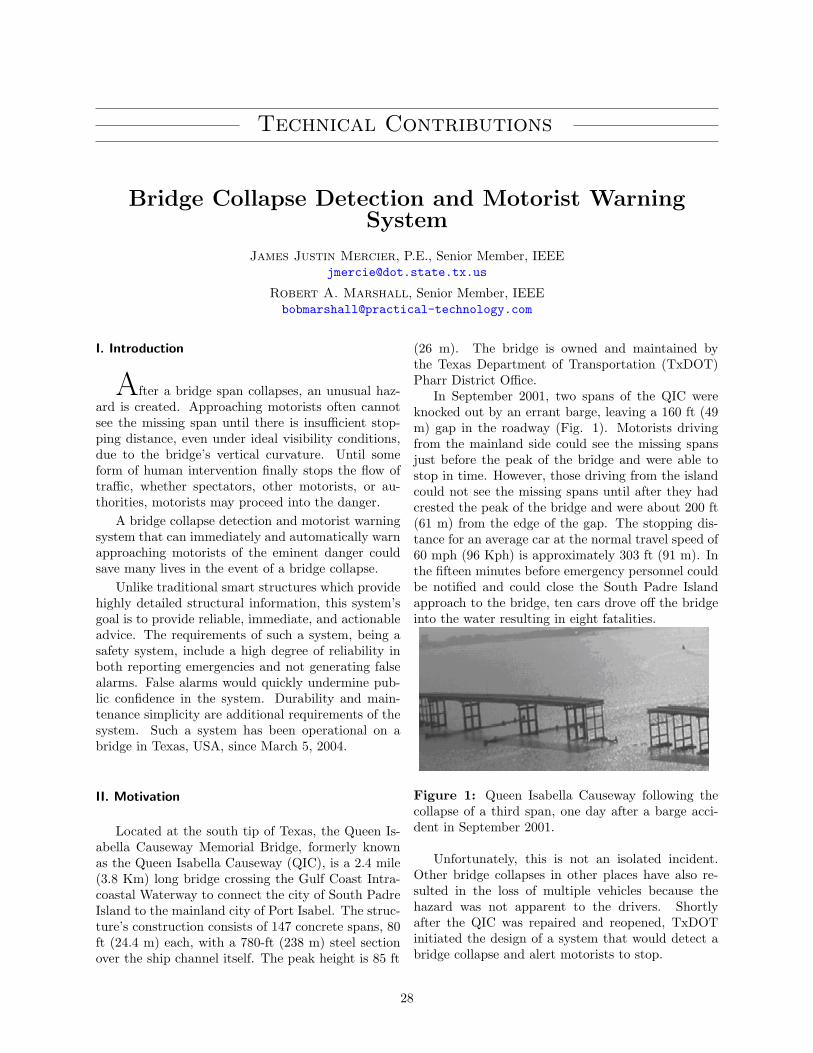
Located at the south tip of Texas, the Queen Is-abella Causeway Memorial Bridge, formerly knownas the Queen Isabella Causeway (QIC), is a 2.4 mile(3.8 Km) long bridge crossing the Gulf Coast Intra-coastal Waterway to connect the city of South PadreIsland to the mainland city of Port Isabel. The struc-ture’s construction consists of 147 concrete spans, 80ft (24.4 m) each, with a 780-ft (238 m) steel sectionover the ship channel itself. The peak height is 85 ft
(26 m). The bridge is owned and maintained bythe Texas Department of Transportation (TxDOT)Pharr District Office.
In September 2001, two spans of the QIC wereknocked out by an errant barge, leaving a 160 ft (49m) gap in the roadway (Fig. 1). Motorists drivingfrom the mainland side could see the missing spansjust before the peak of the bridge and were able tostop in time. However, those driving from the islandcould not see the missing spans until after they hadcrested the peak of the bridge and were about 200 ft(61 m) from the edge of the gap. The stopping dis-tance for an average car at the normal travel speed of60 mph (96 Kph) is approximately 303 ft (91 m). Inthe fifteen minutes before emergency personnel couldbe notified and could close the South Padre Islandapproach to the bridge, ten cars drove off the bridgeinto the water resulting in eight fatalities.
Figure 1: Queen Isabella Causeway following thecollapse of a third span, one day after a barge acci-dent in September 2001.
Unfortunately, this is not an isolated incident.Other bridge collapses in other places have also re-sulted in the loss of multiple vehicles because thehazard was not apparent to the drivers. Shortlyafter the QIC was repaired and reopened, TxDOTinitiated the design of a system that would detect abridge collapse and alert motorists to stop.
28
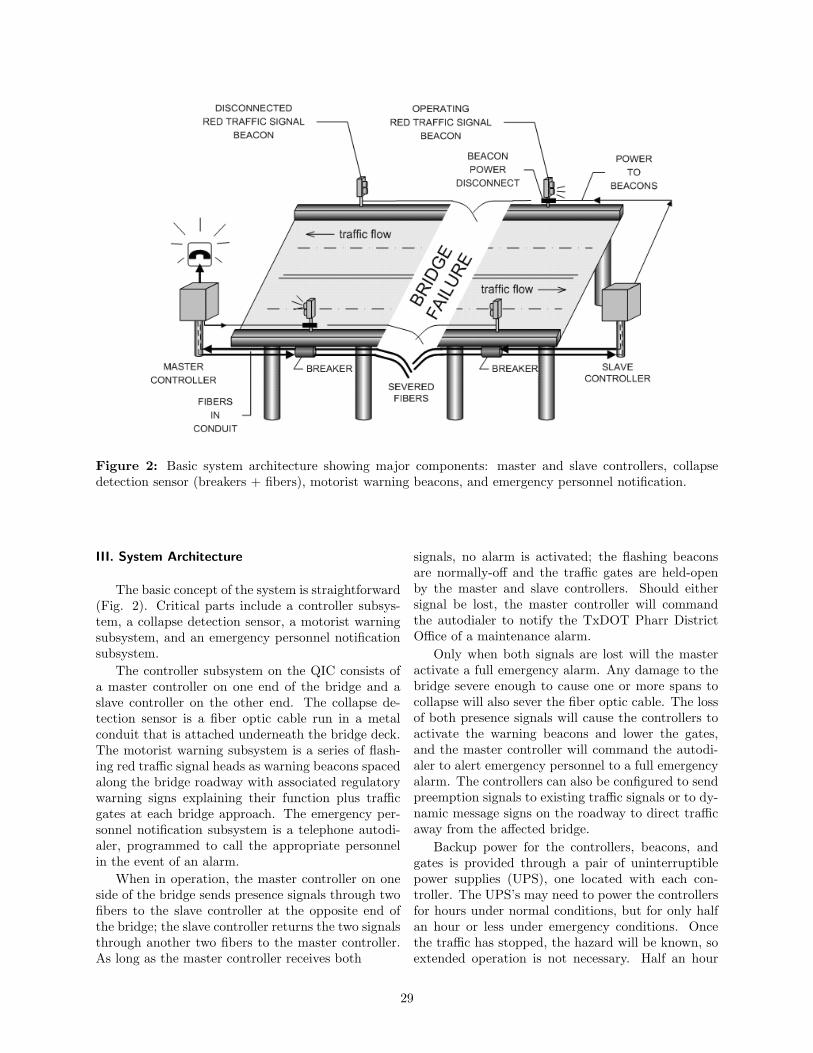
Figure 2: Basic system architecture showing major components: master and slave controllers, collapsedetection sensor (breakers + fibers), motorist warning beacons, and emergency personnel notification.
III. System Architecture
The basic concept of the system is straightforward(Fig. 2). Critical parts include a controller subsys-tem, a collapse detection sensor, a motorist warningsubsystem, and an emergency personnel notificationsubsystem.
The controller subsystem on the QIC consists ofa master controller on one end of the bridge and aslave controller on the other end. The collapse de-tection sensor is a fiber optic cable run in a metalconduit that is attached underneath the bridge deck.The motorist warning subsystem is a series of flash-ing red traffic signal heads as warning beacons spacedalong the bridge roadway with associated regulatorywarning signs explaining their function plus trafficgates at each bridge approach. The emergency per-sonnel notification subsystem is a telephone autodi-aler, programmed to call the appropriate personnelin the event of an alarm.
When in operation, the master controller on oneside of the bridge sends presence signals through twofibers to the slave controller at the opposite end ofthe bridge; the slave controller returns the two signalsthrough another two fibers to the master controller.As long as the master controller receives both
signals, no alarm is activated; the flashing beaconsare normally-off and the traffic gates are held-openby the master and slave controllers. Should eithersignal be lost, the master controller will commandthe autodialer to notify the TxDOT Pharr DistrictOffice of a maintenance alarm.
Only when both signals are lost will the masteractivate a full emergency alarm. Any damage to thebridge severe enough to cause one or more spans tocollapse will also sever the fiber optic cable. The lossof both presence signals will cause the controllers toactivate the warning beacons and lower the gates,and the master controller will command the autodi-aler to alert emergency personnel to a full emergencyalarm. The controllers can also be configured to sendpreemption signals to existing traffic signals or to dy-namic message signs on the roadway to direct trafficaway from the affected bridge.
Backup power for the controllers, beacons, andgates is provided through a pair of uninterruptiblepower supplies (UPS), one located with each con-troller. The UPS’s may need to power the controllersfor hours under normal conditions, but for only halfan hour or less under emergency conditions. Oncethe traffic has stopped, the hazard will be known, soextended operation is not necessary. Half an hour
29

should be sufficient time for emergency first respon-ders to arrive on the scene.
A. ControllerThe controller type selected for the QIC system
was an Allen-Bradley PLC-5. A Programmable LogicController (PLC) receives commands or inputs fromsensors such as thermostats or switches, and respondsby directing actions such as turning on motors or ad-justing flow rates. In this case, the PLC senses theloss of signal and initiates the appropriate alarm.
The master controller is housed in a stainless steelcabinet located at the Port Isabel end of the bridge.The slave controller, dubbed a Remote Rack due toits lack of a coprocessor, is essentially a relay housedin a cabinet on the South Padre Island end of thebridge. The Remote Rack controls the motorist warn-ing gate and beacons for the traffic traveling fromSouth Padre Island to Port Isabel. Although exposedto subtropical sun, neither cabinet is air conditioned;each has a thermostatically-controlled draft fan whichdraws in filtered fresh air.
The Allen-Bradley PLC-5 was selected due to itshistory of reliability in harsh industrial and commer-cial settings and due to district personnel familiar-ity, in spite of its higher cost and more advancedprogramming experience required. PLC equipmentreliability was a critical consideration in the originaldesign which specified one PLC and Remote Rack.Before construction was complete, TxDOT decidedto add a redundant PLC and Remote Rack in themaster and slave controllers. Each PLC was pro-grammed to monitor the functionality of the other;and both have access to the autodialer.
B. Collapse Detection SensorThe fiber optic cable selected for the collapse
detection sensor was a helical lay, six fiber, drybuffered cable, supplied by Optical Cable Corpora-tion of Roanoke, Virginia, USA. The cable was in-stalled in a rigid metal conduit fastened to the bridgeunderneath the deck. Only one sensor conduit was in-stalled since concrete beam bridges do not normallytwist without collapsing the way that steel structuresmight. The cable was anchored and weakened at se-lected locations to ensure that the fibers would breakinstead of the cable stretching or slipping during abridge span collapse. The design of the collapse de-tection sensor was the most challenging aspect of theproject.
Before settling on fiber optic cable, several otheroptions for the collapse detection sensor were consid-
ered: audio, vibration, sonar, radar, free-space laser,and metallic signal cable. The vertical and horizon-tal geometry of the bridge, as well as the risk ofairborne interference, corrosion, and even vandalismlimited the choices to either metallic or fiber optic ca-ble enclosed in a conduit. But, signal losses in metal-lic cable required signal boosters spaced about 0.75miles (1.2 Km) apart, each requiring 120 volt elec-trical power to operate. Metallic cable also may besusceptible to lightning and other electrical interfer-ences.
Fiber optic cable was selected because it requiredonly one booster. The 2.4 mile (3.8 Km) length ofthe bridge required approximately 13,800 ft (4.2 Km)of cable between the master and slave controllers.Then, Allen-Bradley newly released a long range 10Km fiber optic laser which eliminated need for anyboosters.
But, fiber optic cable presented its own uniqueproblems. Both gel-filled and dry fiber optic cablesare designed with added stretch, slip, and reinforce-ment to prevent breaking under the tension of normalinstallation or usage. These properties may be idealfor preventing cable breaks in telecommunications ap-plications, but are specifically contrary to the needsof an elongation-based collapse detection sensor. TheTxDOT standard of a gel-filled or loose-buffered ca-ble is not recommended for this type of applicationbecause the cable is designed to stretch at least 5%without damage to the fibers. The gel could also con-tribute to the fibers slipping in the buffer tube insteadof breaking to initiate the full emergency alarm.
A typical dry or tight-buffered cable stretchesmuch less before breaking. A loose lay fiber bundle istightly wrapped within a layer of Aramid (a toughsynthetic yarn), and contained within a polyethy-lene sheath. The helical lay of the fibers providesa little extra fiber length, increasing elongation be-fore breakage. The Aramid yarn decreases frictionwithin the cable, permitting the fibers to move eas-ily within the sheath. In addition, the reinforcingfiberglass strength member within the cable assumesany tension that would otherwise be imparted to thefragile optical fibers. Unaddressed, the stretch, slip-page, and strength issues could prevent the fibersfrom breaking during a collapse.
Several mechanical methods to ensure fiber break-age were considered but were rejected as either notreliable or risky to premature damage. The acceptedsolution was to weaken the cable at selected placesby cutting the sheath, strength member, and fillertubes or fibers, but leaving the optical fibers intact.TxDOT and Practical Technology, LLC, of Caren-cro, Louisiana, USA, developed separate devices to
30
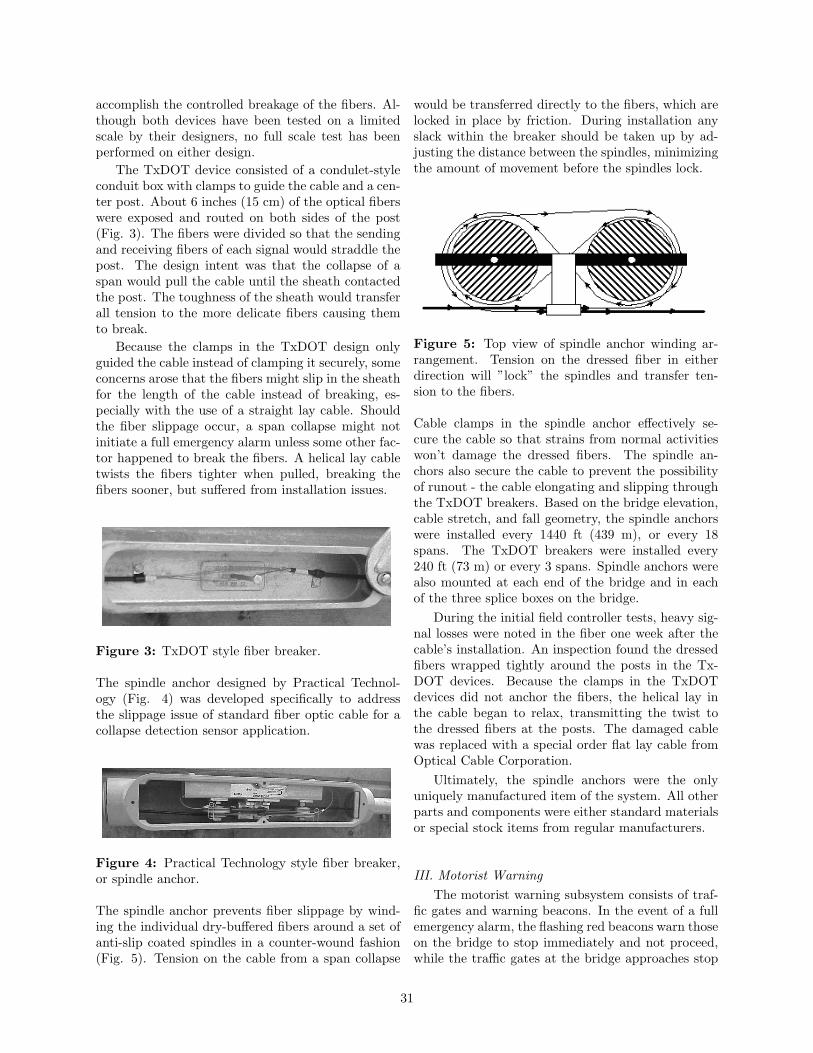
accomplish the controlled breakage of the fibers. Al-though both devices have been tested on a limitedscale by their designers, no full scale test has beenperformed on either design.
The TxDOT device consisted of a condulet-styleconduit box with clamps to guide the cable and a cen-ter post. About 6 inches (15 cm) of the optical fiberswere exposed and routed on both sides of the post(Fig. 3). The fibers were divided so that the sendingand receiving fibers of each signal would straddle thepost. The design intent was that the collapse of aspan would pull the cable until the sheath contactedthe post. The toughness of the sheath would transferall tension to the more delicate fibers causing themto break.
Because the clamps in the TxDOT design onlyguided the cable instead of clamping it securely, someconcerns arose that the fibers might slip in the sheathfor the length of the cable instead of breaking, es-pecially with the use of a straight lay cable. Shouldthe fiber slippage occur, a span collapse might notinitiate a full emergency alarm unless some other fac-tor happened to break the fibers. A helical lay cabletwists the fibers tighter when pulled, breaking thefibers sooner, but suffered from installation issues.
Figure 3: TxDOT style fiber breaker.
The spindle anchor designed by Practical Technol-ogy (Fig. 4) was developed specifically to addressthe slippage issue of standard fiber optic cable for acollapse detection sensor application.
Figure 4: Practical Technology style fiber breaker,or spindle anchor.
The spindle anchor prevents fiber slippage by wind-ing the individual dry-buffered fibers around a set ofanti-slip coated spindles in a counter-wound fashion(Fig. 5). Tension on the cable from a span collapse
would be transferred directly to the fibers, which arelocked in place by friction. During installation anyslack within the breaker should be taken up by ad-justing the distance between the spindles, minimizingthe amount of movement before the spindles lock.
Figure 5: Top view of spindle anchor winding ar-rangement. Tension on the dressed fiber in eitherdirection will ”lock” the spindles and transfer ten-sion to the fibers.
Cable clamps in the spindle anchor effectively se-cure the cable so that strains from normal activitieswon’t damage the dressed fibers. The spindle an-chors also secure the cable to prevent the possibilityof runout - the cable elongating and slipping throughthe TxDOT breakers. Based on the bridge elevation,cable stretch, and fall geometry, the spindle anchorswere installed every 1440 ft (439 m), or every 18spans. The TxDOT breakers were installed every240 ft (73 m) or every 3 spans. Spindle anchors werealso mounted at each end of the bridge and in eachof the three splice boxes on the bridge.
During the initial field controller tests, heavy sig-nal losses were noted in the fiber one week after thecable’s installation. An inspection found the dressedfibers wrapped tightly around the posts in the Tx-DOT devices. Because the clamps in the TxDOTdevices did not anchor the fibers, the helical lay inthe cable began to relax, transmitting the twist tothe dressed fibers at the posts. The damaged cablewas replaced with a special order flat lay cable fromOptical Cable Corporation.
Ultimately, the spindle anchors were the onlyuniquely manufactured item of the system. All otherparts and components were either standard materialsor special stock items from regular manufacturers.
III. Motorist WarningThe motorist warning subsystem consists of traf-
fic gates and warning beacons. In the event of a fullemergency alarm, the flashing red beacons warn thoseon the bridge to stop immediately and not proceed,while the traffic gates at the bridge approaches stop
31

anyone else from entering the bridge. Beacons be-yond the point of failure are disconnected, allowingthat traffic to exit the bridge normally.
The most feasible way to stop traffic in an emer-gency is with a flashing red signal. The warningbeacons each consist of two 12 in (300 mm) red lightemitting diode (LED) traffic signal heads which flashalternately when activated (Fig. 6).
Figure 6: Installed series of flashing red trafficsignal beacons warn motorists of a bridge collapse.
The LED’s low power draw and monochromatic-ity make it ideal for this application. The LED’sare visible at least 1 mile (1.61 Km) in full daylightunder normal coastal conditions of haze and brightsunshine.
The beacons are controlled by one flasher modulein their respective controller cabinets which causesthem to flash synchronously on each side. The syn-chronous flashing is intended to relay urgency to theaffected motorists.
No guidelines exist for the placement or spacingof the beacons. Considerations of driver view ability,ease of electrical power supply, and inaccessibility
to vandalism determined the best placement to be 3ft (1 m) beyond the outside bridge rail. Placing thebeacons on the center concrete traffic barrier was con-sidered but rejected because the location appearedinviting to vandalism. The beacon mounts were de-signed for 100-mph (160 Kph) wind speeds becausethe QIC is located in a hurricane zone. During thenear miss by the 2005 hurricane Emily, wind gusts inPort Isabel were reported at 79 mph (127 Kph), butonly one beacon head was damaged.
Beacon spacing considerations included sufficient vis-ibility time, adequate stopping distance, and minimalscenic intrusiveness to arrive at a spacing of 560 ft(171 m). The Texas Department of Public SafetyDriver’s Handbook lists the average stopping dis-tance for a passenger vehicle traveling at 60 mph (96Kph) on dry pavement under normal conditions as303 ft (91 m). Adding a margin of three secondsto cover reaction time and non-ideal road conditionsresults in a spacing of 567 ft (173 m). Since thebridge spans are 80 ft (24.4 m) each, spacing wasset at 560 ft (171 m), the end of every seventh span.This spacing is intended to be sufficient for effectivewarning without being excessive during the normalnon-emergency periods. The beacons were installedalong the entire length of the QIC to provide protec-tion from collapse at any point along the bridge, notjust in proximity to the ship channel.
The placement of warning beacons along a non-movable bridge is not a standard practice and war-rants explanation. Regulatory warning signs weremounted in each travel direction to instruct the mo-torists to stop immediately should the beacons ac-tivate: ”STOP when flashing DANGER/PELIGROcon luz intermitente ALTO.” Bilingualism was ap-propriate because of the proximity to Mexico and thelarge number of Mexican tourists to the island. Thefirst sign and beacon were mounted on the traffic gateat each bridge approach (Fig. 7). Additional signswere spaced across the bridge to remind motorists ofthe purpose of the beacons.
32

Figure 7: Installed traffic gate at bridge approachesprevents additional traffic from entering the bridgeduring a full emergency alarm.
Figure 8: Connectors pulled to the right by a col-lapse will leave the current beacon operating butprotect the beacon circuit from a total blackout.
D. Electrical IssuesThree primary electrical issues were identified:
Protecting the warning beacon circuits from electri-cal shorts during a collapse, reliable electrical power,and protection of the PLC from lighting and transientvoltages.
The collapse of a span would probably shred theelectrical conductors feeding the beacons causing theconductors to short together which would trip thecircuit breaker, leaving all the beacons dark. To re-duce the likelihood of such a situation, brass weldingcable connectors were used as quick disconnects forthe beacon power conductors. Mounted in line withthe conductors in the junction boxes at each beacon,(Fig. 8) the collapsing span would pull the conduc-tors causing the connectors to disconnect prior to theconductors shredding and shorting out. All the bea-cons up to the missing span would continue to oper-ate and warn the motorists. Under tests performedby TxDOT, the brass connectors pulled apart easilyeven when twisted into the lock position.
South Padre Island and Port Isabel often sufferutility power outages, voltage sags, and voltage tran-sients, the effects of which were negated through anITS quality uninterruptible power supply (UPS) in-stalled in each of the controller cabinets. ITS andtraffic signal UPS’s are designed for high temperatureextremes in remote, uncontrolled environments. Tomitigate the heating problems, the UPS was placedon the highest shelf at the top of the cabinet while thebatteries were placed on the lowest shelf at the bot-tom. The air circulation is drawn in near the bottomand exhausted through vents at the top.
Lightning presented a risk to the controllers andequipment because of the geographic location andphysical exposure. To provide a suitable ground path,the cabinet anchor bolts in concrete foundations werebonded to the reinforcing steel for a Ufer ground.All conduits in the system were rigid metal installedwithout coating to provide additional grounding andwere bonded to both the cabinet and the reinforcingsteel, including the feeder conduit from the electricalservice. At each electrical service, a Phoenix Con-tact Combo-Trab lightning/transient surge suppres-sor was installed because the electrical utility lines inthat area are particularly susceptible to direct strikesby lightning.
IV. PERIODIC TESTS
A full emergency alarm test is performed quar-terly to check the operation of the motorist warningsubsystem and the autodialer. A fiber break is sim-
33
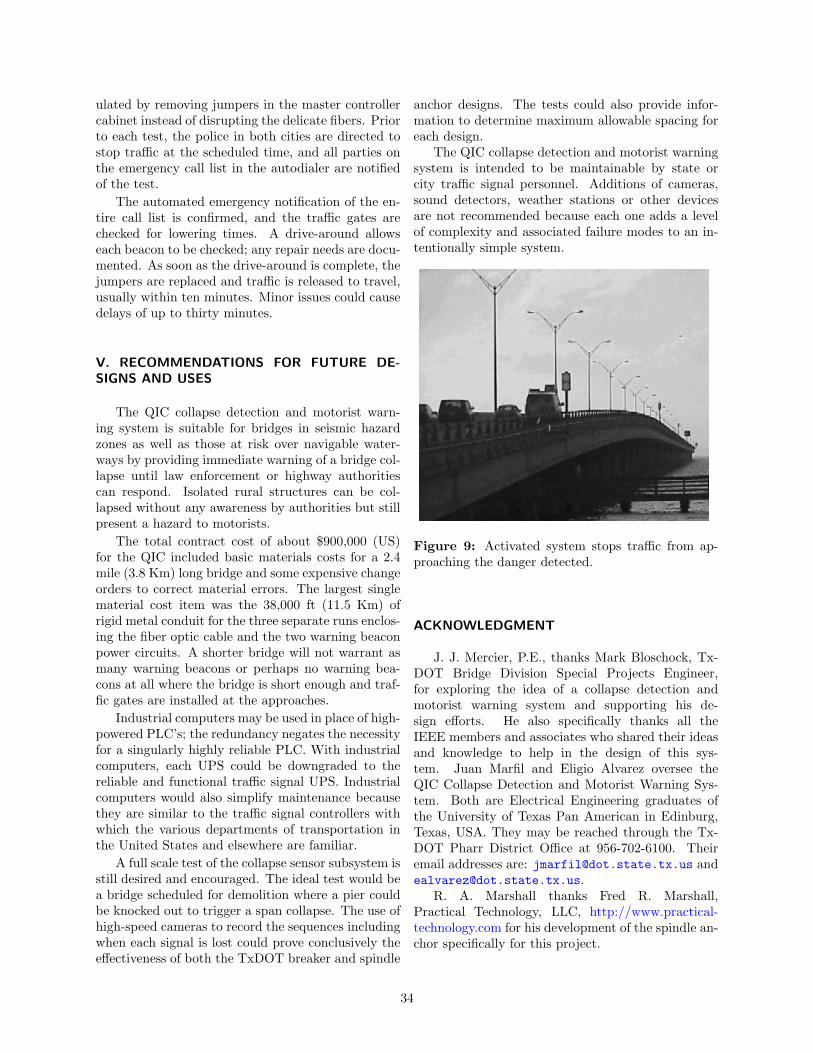
ulated by removing jumpers in the master controllercabinet instead of disrupting the delicate fibers. Priorto each test, the police in both cities are directed tostop traffic at the scheduled time, and all parties onthe emergency call list in the autodialer are notifiedof the test.
The automated emergency notification of the en-tire call list is confirmed, and the traffic gates arechecked for lowering times. A drive-around allowseach beacon to be checked; any repair needs are docu-mented. As soon as the drive-around is complete, thejumpers are replaced and traffic is released to travel,usually within ten minutes. Minor issues could causedelays of up to thirty minutes.
V. RECOMMENDATIONS FOR FUTURE DE-SIGNS AND USES
The QIC collapse detection and motorist warn-ing system is suitable for bridges in seismic hazardzones as well as those at risk over navigable water-ways by providing immediate warning of a bridge col-lapse until law enforcement or highway authoritiescan respond. Isolated rural structures can be col-lapsed without any awareness by authorities but stillpresent a hazard to motorists.
The total contract cost of about $900,000 (US)for the QIC included basic materials costs for a 2.4mile (3.8 Km) long bridge and some expensive changeorders to correct material errors. The largest singlematerial cost item was the 38,000 ft (11.5 Km) ofrigid metal conduit for the three separate runs enclos-ing the fiber optic cable and the two warning beaconpower circuits. A shorter bridge will not warrant asmany warning beacons or perhaps no warning bea-cons at all where the bridge is short enough and traf-fic gates are installed at the approaches.
Industrial computers may be used in place of high-powered PLC’s; the redundancy negates the necessityfor a singularly highly reliable PLC. With industrialcomputers, each UPS could be downgraded to thereliable and functional traffic signal UPS. Industrialcomputers would also simplify maintenance becausethey are similar to the traffic signal controllers withwhich the various departments of transportation inthe United States and elsewhere are familiar.
A full scale test of the collapse sensor subsystem isstill desired and encouraged. The ideal test would bea bridge scheduled for demolition where a pier couldbe knocked out to trigger a span collapse. The use ofhigh-speed cameras to record the sequences includingwhen each signal is lost could prove conclusively theeffectiveness of both the TxDOT breaker and spindle
anchor designs. The tests could also provide infor-mation to determine maximum allowable spacing foreach design.
The QIC collapse detection and motorist warningsystem is intended to be maintainable by state orcity traffic signal personnel. Additions of cameras,sound detectors, weather stations or other devicesare not recommended because each one adds a levelof complexity and associated failure modes to an in-tentionally simple system.
Figure 9: Activated system stops traffic from ap-proaching the danger detected.
ACKNOWLEDGMENT
J. J. Mercier, P.E., thanks Mark Bloschock, Tx-DOT Bridge Division Special Projects Engineer,for exploring the idea of a collapse detection andmotorist warning system and supporting his de-sign efforts. He also specifically thanks all theIEEE members and associates who shared their ideasand knowledge to help in the design of this sys-tem. Juan Marfil and Eligio Alvarez oversee theQIC Collapse Detection and Motorist Warning Sys-tem. Both are Electrical Engineering graduates ofthe University of Texas Pan American in Edinburg,Texas, USA. They may be reached through the Tx-DOT Pharr District Office at 956-702-6100. Theiremail addresses are: [email protected] [email protected].
R. A. Marshall thanks Fred R. Marshall,Practical Technology, LLC, http://www.practical-technology.com for his development of the spindle an-chor specifically for this project.
34

REFERENCES
1. James. Justin. Mercier, P.E., ”The QueenIsabella Causeway Bridge Collapse Detectionand Motorist Warning System,” Proceedings ofthe Texas Section ASCE Spring Meeting, April.2005.
James Justin Mercier, P.E. (SM IEEE, M ASCE) isboth a construction electrician and a Civil Engineer. Hegraduated from the International Brotherhood of Electri-cal Workers (IBEW) Apprenticeship program in 1979 asa Journeyman Wireman (construction electrician), wherehis electrical work experience included power plants, steelmills, refineries, schools, traffic signals, and office build-ings prior to his returning to college. He earned a B.S.degree in civil engineering from the University of Cincin-nati, Ohio, USA, in 1986, and worked as an Environmen-tal Engineer in the private sector prior to joining TxDOT.
Since joining TxDOT in 1994, he has been a TrafficEngineer in Roadway Illumination and in Traffic Signals,and a Hydraulics Engineer with the Design Division.
Mr. Mercier is a Licensed Professional Engineer in Illi-nois, Indiana, Michigan, Ohio, Texas, and Wisconsin, anda licensed master electrician in both the State of Texasand the City of Austin. He is a past Chairman of theAustin, Texas Chapter of the IEEE Power EngineeringSociety.
Robert A. Marshall (SM IEEE) earned the B.S. de-gree in electrical engineering in 1994 from Louisiana StateUniversity, Baton Rouge, LA, USA.
He is currently an Independent Consultant in George-town TX. His previous experience includes co-founding arural local exchange telephone company. He also spentmany years developing DSL, Ethernet, and CDMA cellu-lar technologies with Cisco Systems and Motorola, and ashort time at The Superconducting Super Collider.
Mr. Marshall has 19 patents awarded or pending. His
patent for the spindle anchor described here is licensed to
Practical Technology, LLC. He has also developed a com-
plete pre-programmed package subsystem implementing
the controller functionality described above.
35

Non-Society ITS News
A Glimpse on the Webby Alessandra Fascioli
This department is dedicated to catching a glimpse on the WWW trying to discover interesting ITS relatedWeb resources. Reviewed sites range from research programs and projects, to software packages, databases,associations, non-profit companies, and more.Every suggestion or contribution is welcome and should be addressed to [email protected].
• PIARC, the World Road Association, is a non-political and non-profit association whose mis-sion is exchanging knowledge on roads and road transport policy and practices within an integratedsustainable transport context. PIARC wants to be an international forum for analysis and discus-sion of the full spectrum of transport issues, related to roads and road transport. PIARC createsand coordinates Technical Committees, organizes a World Road Congress and various technicalseminars and publishes a large number of documents including a quarterly magazine. Link to PI-ARC site:http://www.piarc.org/en/
• The aim of the Society of Automotive Engineers is sharing information and exchange ideas foradvancing the engineering of mobility systems. SAE is a resource for standards development, events,and technical information and expertise used in designing, building, maintaining, and operatingself-propelled vehicles for use on land or sea, in air or space. SAE International, through the workof committee members and participants, maintains a number of technical standards and relateddocuments. Through its ITS initiative, SAE has identified key intelligent vehicle (IV) functionalareas as prime candidates for development to improve basic vehicle functions that, in turn, providethe basis for improved safety/security and information/entertainment functions. Link to SAE site:http://www.sae.org
• The University of Maryland’s Center for Advanced Tranportation Technology (CATT)Lab works to provide safe and efficient transportation systems through improved operations andmanagement by means of research and development, technology implementation, training and ed-ucation. Research focuses on Archived Data User Services, Data Visualization, Image Processing,Traveler Information Systems. Link to CATT site:http://www.cattlab.umd.edu/
• The Bureau of Transportation Statistics (BTS) is a statistical agency aimed at data collec-tion, analysis, and reporting and to ensure the most cost-effective use of transportation-monitoringresources. BTS brings a greater degree of coordination, comparability, and quality standards totransportation data, and to fill important gaps. Its mission is developing transportation data andinformation of high quality, and to advance their effective use in both public and private trans-portation decision making. Link to BTS site:http://www.bts.gov
36
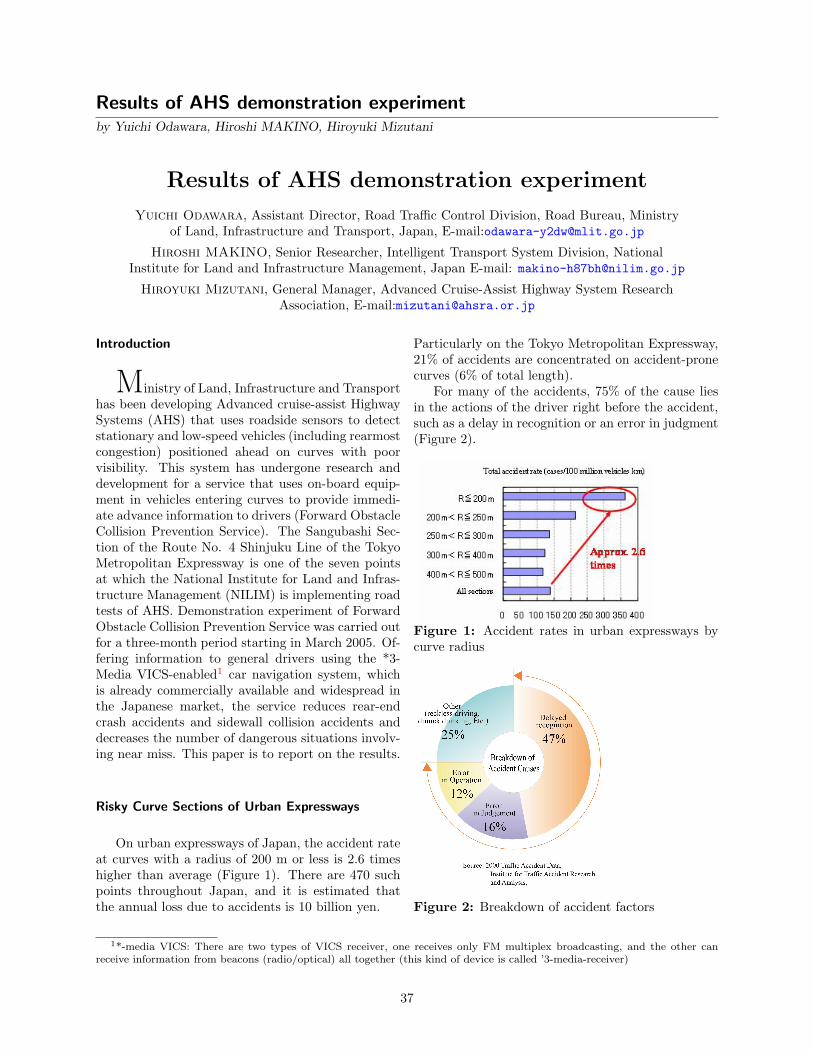
Results of AHS demonstration experimentby Yuichi Odawara, Hiroshi MAKINO, Hiroyuki Mizutani
Results of AHS demonstration experiment
Yuichi Odawara, Assistant Director, Road Traffic Control Division, Road Bureau, Ministryof Land, Infrastructure and Transport, Japan, E-mail:[email protected]
Hiroshi MAKINO, Senior Researcher, Intelligent Transport System Division, NationalInstitute for Land and Infrastructure Management, Japan E-mail: [email protected]
Hiroyuki Mizutani, General Manager, Advanced Cruise-Assist Highway System ResearchAssociation, E-mail:[email protected]
Introduction
Ministry of Land, Infrastructure and Transporthas been developing Advanced cruise-assist HighwaySystems (AHS) that uses roadside sensors to detectstationary and low-speed vehicles (including rearmostcongestion) positioned ahead on curves with poorvisibility. This system has undergone research anddevelopment for a service that uses on-board equip-ment in vehicles entering curves to provide immedi-ate advance information to drivers (Forward ObstacleCollision Prevention Service). The Sangubashi Sec-tion of the Route No. 4 Shinjuku Line of the TokyoMetropolitan Expressway is one of the seven pointsat which the National Institute for Land and Infras-tructure Management (NILIM) is implementing roadtests of AHS. Demonstration experiment of ForwardObstacle Collision Prevention Service was carried outfor a three-month period starting in March 2005. Of-fering information to general drivers using the *3-Media VICS-enabled1 car navigation system, whichis already commercially available and widespread inthe Japanese market, the service reduces rear-endcrash accidents and sidewall collision accidents anddecreases the number of dangerous situations involv-ing near miss. This paper is to report on the results.
Risky Curve Sections of Urban Expressways
On urban expressways of Japan, the accident rateat curves with a radius of 200 m or less is 2.6 timeshigher than average (Figure 1). There are 470 suchpoints throughout Japan, and it is estimated thatthe annual loss due to accidents is 10 billion yen.
Particularly on the Tokyo Metropolitan Expressway,21% of accidents are concentrated on accident-pronecurves (6% of total length).
For many of the accidents, 75% of the cause liesin the actions of the driver right before the accident,such as a delay in recognition or an error in judgment(Figure 2).
Figure 1: Accident rates in urban expressways bycurve radius
Figure 2: Breakdown of accident factors
1*-media VICS: There are two types of VICS receiver, one receives only FM multiplex broadcasting, and the other canreceive information from beacons (radio/optical) all together (this kind of device is called ’3-media-receiver)
37
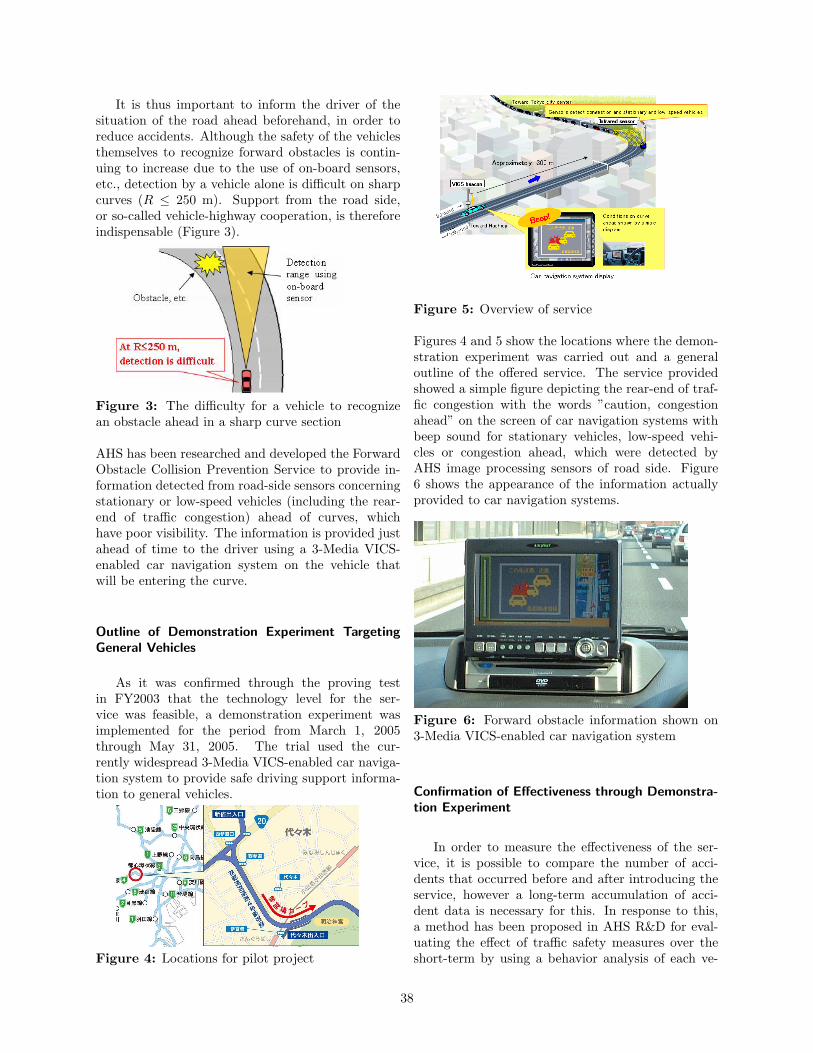
It is thus important to inform the driver of thesituation of the road ahead beforehand, in order toreduce accidents. Although the safety of the vehiclesthemselves to recognize forward obstacles is contin-uing to increase due to the use of on-board sensors,etc., detection by a vehicle alone is difficult on sharpcurves (R ≤ 250 m). Support from the road side,or so-called vehicle-highway cooperation, is thereforeindispensable (Figure 3).
Figure 3: The difficulty for a vehicle to recognizean obstacle ahead in a sharp curve section
AHS has been researched and developed the ForwardObstacle Collision Prevention Service to provide in-formation detected from road-side sensors concerningstationary or low-speed vehicles (including the rear-end of traffic congestion) ahead of curves, whichhave poor visibility. The information is provided justahead of time to the driver using a 3-Media VICS-enabled car navigation system on the vehicle thatwill be entering the curve.
Outline of Demonstration Experiment TargetingGeneral Vehicles
As it was confirmed through the proving testin FY2003 that the technology level for the ser-vice was feasible, a demonstration experiment wasimplemented for the period from March 1, 2005through May 31, 2005. The trial used the cur-rently widespread 3-Media VICS-enabled car naviga-tion system to provide safe driving support informa-tion to general vehicles.
Figure 4: Locations for pilot project
Figure 5: Overview of service
Figures 4 and 5 show the locations where the demon-stration experiment was carried out and a generaloutline of the offered service. The service providedshowed a simple figure depicting the rear-end of traf-fic congestion with the words ”caution, congestionahead” on the screen of car navigation systems withbeep sound for stationary vehicles, low-speed vehi-cles or congestion ahead, which were detected byAHS image processing sensors of road side. Figure6 shows the appearance of the information actuallyprovided to car navigation systems.
Figure 6: Forward obstacle information shown on3-Media VICS-enabled car navigation system
Confirmation of Effectiveness through Demonstra-tion Experiment
In order to measure the effectiveness of the ser-vice, it is possible to compare the number of acci-dents that occurred before and after introducing theservice, however a long-term accumulation of acci-dent data is necessary for this. In response to this,a method has been proposed in AHS R&D for eval-uating the effect of traffic safety measures over theshort-term by using a behavior analysis of each ve-
38

Figure 7: Situation of accident occurrence on Route No.4 Shinjuku line, including Sangubashi
hicle captured by AHS image processing sensors. Inthe analysis of the proving test conducted in 2003, itbecame to know that behind a single rear-end crashaccident, there are 80 cases of sudden decelerationwhat are thought to be near miss.
1. Basic analysis results
The figures for March to April, when thedemonstration experiment was implemented,were compared with the number of accidentsthat occurred in the past fiscal year on theRoute No.4 Shinjuku Line. (Figure 7)
For the all lines of Route No. 4 as well as sim-ilar sharp curves, there was a increasing trendfor 2005 compared to 2004, but the Sangubashicurve stands out in 2005 with a decrease. Be-cause the drainage pavement on the Sangubashicurve was being fixed in 2005, it is not possibleto make a simple comparison, but it is possi-ble to consider that safety measures, includingthe service offered as a demonstration experi-ment, had an effect. The inbound lane of theSangubashi is a heavy-traffic section with dailytraffic of about 47,000 vehicles and is a placewhere the occurrence of congestion is chronicin the mornings and evenings. As a result ofsurveying the vehicles that drive through thissection, it was learned that about 10% of all themotor vehicles were equipped with a 3-MediaVICS-enabled car navigation system.
2. Results of traffic flow observation
The frequency of vehicles suddenly deceleratingin the curve section when there was an obsta-cle ahead and speeds when the curve was beingapproached were observed using data detectedby AHS image processing sensors (Chart 1).
As a result of the analysis, it was learned thatbecause of the service offering advance informa-tion on obstacles ahead, behavior that can be
considered near miss, such as sudden decelera-tion and approaching the curve at a high speedetc., decreased 9-14%. In the future, it can bethought that the effect will be further improvedby, for example, greater penetration of car nav-igation systems, and the addition of providinginformation through roadside message sign.
Chart 1: Comparison before/after introduc-tion of service based on sensor data analysis
3. Evaluation of satisfaction based on collection ofdrivers’ opinions
For this time’s demonstration experiment, testmonitors were recruited ahead of time fromamong general drivers, and their satisfactionlevel was evaluated by collecting a question-naire on their opinions when driving throughthe curve section. There were 259 test moni-tors. Also, opinions were collected from othergeneral drivers through the Internet, etc., so to-gether with the test monitors, there were 296 re-sponses on the experience of receiving the infor-mation. The results of the collection of opinionsshow that it is a service that will generally beaccepted by drivers, and drivers take expectedactions such as being cautious or gradually de-celerating after receiving the information.
Also, dangerous actions such as being surprisedby the information and making sudden maneu-vers were not occurring. On the other hand,there were also opinions that in the experience,
39

Figure 8: Overall evaluation of test monitors
the information provided was not useful. Onanalyzing the reason for that, it was learnedthat because it was already congested up un-til the mouth of the curve, the information wasnot necessary. In order to maintain the effect ofproviding safety information, it is thought thatproviding the necessary information at the nec-essary time is important, and this is a point forimprovement in the future. Also, a question-naire was collected from the test monitors for anoverall evaluation of the service experience overthe course of the demonstration experiment pe-riod (three months) (Figure 8). Looking at theresults of this, the service was highly evaluated,with 85% of test monitors evaluating it as effec-tive, and 90% desiring the continuation of thisservice for the Sangubashi curve.
Conclusion
As a result of conducting a demonstration exper-iment of a forward obstacle collision prevention ser-vice through 3-Media VICS-enabled car navigationsystems, even though the rate of compatible car nav-igation systems being equipped was 10%, it was con-firmed that the service changed the behavior of ve-hicles toward the safe side due to the provision ofinformation, and that the system could be acceptedby general drivers. The results also showed that itwas possible to clarify the system’s potential as a newtraffic safety measure. However, in order to maintainthe effect of the service, it became clear that improve-ments are needed so that the necessary informationis provided at the necessary time. Additionally, as amethod of evaluating traffic safety measures, it wasshown that it is effective to analyze vehicle behavior
that can be thought to be near miss through AHSimage processing sensors. It thus became clear thatITS can be an effective method in terms of the anal-ysis and evaluation of traffic safety measures. Futuretasks include service improvements reflecting drivers’opinions, and plans to undertake understanding thestability of the effect throughout the year. Aimingfor the continued reduction of traffic accidents in thefuture, research and development toward the realiza-tion of an AHS service will be promoted.
Future plans
Smartway was placed as a national strategy aim-ing to realize a full-fledged ITS society through theconcrete objectives of Zero Fatal Traffic Accidents,Safe Driving Support for the Rapidly Growing Num-ber of Elderly Drivers (Figure 9).
1. Concept of vehicle-highway cooperation is upto now and spread to the world
2. The effort to realize a full-fledged ITS societyin 2007 is underway
3. Early implementation is the goal for informa-tion provision
Figure 9: AHS Development
40

2005 IEEE International Conference on Vehicular Electronics and Safety
(IEEE ICVES’05) Sponsored by the IEEE Intelligent Transportation Systems Society
October 14 - 18, 2005, Xi’an, Shaanxi, China
Advisory Committee Co-Chairs Charles Herget IEEE ITS Society Konghui Guo Jilin Univ. , China Guoqing Sun China National Technical Committee of ITS Standardization Gang Wan Tongji Univ. , China General Chair Nanning Zheng Xi’an Jiaotong Univ., China [email protected] Program Chair Feiyue Wang Univ. of Arizona [email protected] Program Co-Chairs Alberto Broggi Univ. of Parma, Italy [email protected] Hironao Kawashima Keio Univ., Japan [email protected] Richard Bishop IVSource.net [email protected] Tutorial Chair Li Li Univ. of Arizona [email protected] Finance Chair Yuehu Liu Xi’an Jiaotong Univ., China [email protected] Publication Chair Tsuneo Takahashi NF company, Japan Publicity Chair Shuming Tang Academy of Sciences, China [email protected] Special Session Chair Xin Guan Jilin Univ., China [email protected] Exhibits Chair Haijun Gao Academy of Sciences, China [email protected] Registration Chair Hong Cheng Xi’an Jiaotong Univ., China [email protected] Local Arrangements Chair Binggang Cao Xi’an Jiaotong Univ., China [email protected] Student Activity Chair Grey Lai University of Arizona, USA [email protected]
The International Conference on Vehicular Electronics and Safety (ICVES’05) is an annual forum sponsored by the IEEE Intelligent Transportation Systems(ITS) Society. It gathers researchers from industries and universities to discuss research and applications for vehicle electronics, and vehicle safety systems. Papers dealing with all aspects of vehicle electronics and vehicle safety-related intelligent systems are solicited for ICVES’05. PROGRAM TOPICS • Active and Passive Safety Systems • Telematics • Vehicular Power Networks • X-By Wire Technology • System-On-a-Chip • Vehicular Sensor • Vehicle Bus • Sensor Network • Embedded Operation System • Electro Magnetic Compatibility • Inter-Vehicular Network • Human Factors
• Navigation and Localization Systems • In-Vehicular Network • Vehicular Measurement Technology • Vehicular Signal Processing • Micro-electromechanical Systems • Image Sensor • Vehicle Control • Driver Assistance Driving Systems • Adaptive Cruise Control Systems • Pattern Recognition for Vehicles • Human Machine Interaction • Others
SPECIAL SESSION ORGANIZATION is encouraged. Organizers should contact Prof. Xin Guan at [email protected]. PAPER SUBMISSION Complete manuscripts in PDF format must be electronically submitted to conference website: https://150.135.155.192/ves05/index.php. Submitted manuscripts should be within six(6) pages in IEEE two-column format including figures, tables and references. A Latex style file and a Microsoft Word templates are available from the IEEE website (http://www.ieee.org/pubs/transactions/stylesheets.xml). However, submission MUST be PDF FORMAT. Please refer to the following websites for the most up-to-date information: https://150.135.155.192/ves05/index.php htttp://iv.xjtu.edu.cn http://www.ieeeves.org http://www.ewh.ieee.org/tc/its/conf.html. Important Dates Paper submission deadline------------------------June 15, 2005 Notification of acceptance-------------------------July 15, 2005 Camera-ready copy due----------------------------August 15, 2005 Call for Demonstrations Live vehicle demonstrations are planned for Oct. 19~Nov. 4, 2005 from Xi’an to Dun Huang, Perspective demonstrators should contact Prof. Lin at [email protected] before Jul. 15, 2005. You can get the information of the conference agenda from Hong Cheng ([email protected]).
Call for Papers
41

42
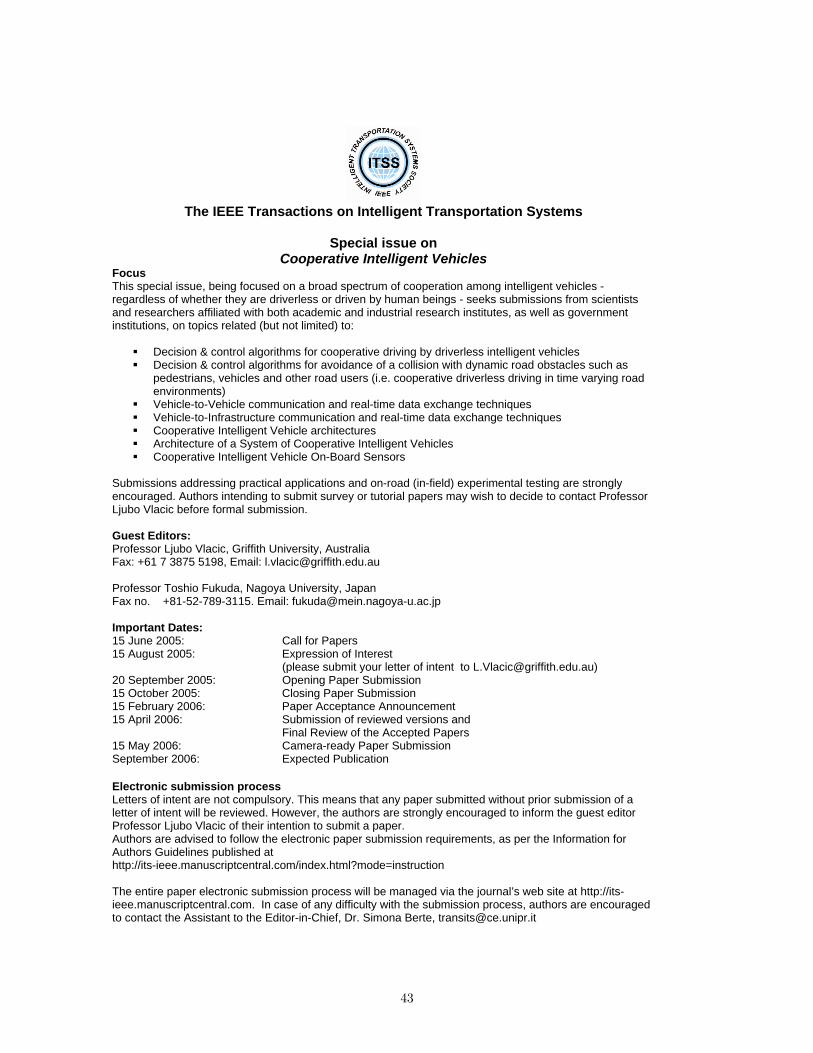
The IEEE Transactions on Intelligent Transportation Systems
Special issue on
Cooperative Intelligent Vehicles Focus This special issue, being focused on a broad spectrum of cooperation among intelligent vehicles - regardless of whether they are driverless or driven by human beings - seeks submissions from scientists and researchers affiliated with both academic and industrial research institutes, as well as government institutions, on topics related (but not limited) to:
Decision & control algorithms for cooperative driving by driverless intelligent vehicles Decision & control algorithms for avoidance of a collision with dynamic road obstacles such as
pedestrians, vehicles and other road users (i.e. cooperative driverless driving in time varying road environments)
Vehicle-to-Vehicle communication and real-time data exchange techniques Vehicle-to-Infrastructure communication and real-time data exchange techniques Cooperative Intelligent Vehicle architectures Architecture of a System of Cooperative Intelligent Vehicles Cooperative Intelligent Vehicle On-Board Sensors
Submissions addressing practical applications and on-road (in-field) experimental testing are strongly encouraged. Authors intending to submit survey or tutorial papers may wish to decide to contact Professor Ljubo Vlacic before formal submission. Guest Editors: Professor Ljubo Vlacic, Griffith University, Australia Fax: +61 7 3875 5198, Email: [email protected] Professor Toshio Fukuda, Nagoya University, Japan Fax no. +81-52-789-3115. Email: [email protected] Important Dates: 15 June 2005: Call for Papers 15 August 2005: Expression of Interest (please submit your letter of intent to [email protected]) 20 September 2005: Opening Paper Submission 15 October 2005: Closing Paper Submission 15 February 2006: Paper Acceptance Announcement 15 April 2006: Submission of reviewed versions and Final Review of the Accepted Papers 15 May 2006: Camera-ready Paper Submission September 2006: Expected Publication Electronic submission process Letters of intent are not compulsory. This means that any paper submitted without prior submission of a letter of intent will be reviewed. However, the authors are strongly encouraged to inform the guest editor Professor Ljubo Vlacic of their intention to submit a paper. Authors are advised to follow the electronic paper submission requirements, as per the Information for Authors Guidelines published at http://its-ieee.manuscriptcentral.com/index.html?mode=instruction The entire paper electronic submission process will be managed via the journal’s web site at http://its-ieee.manuscriptcentral.com. In case of any difficulty with the submission process, authors are encouraged to contact the Assistant to the Editor-in-Chief, Dr. Simona Berte, [email protected]
43
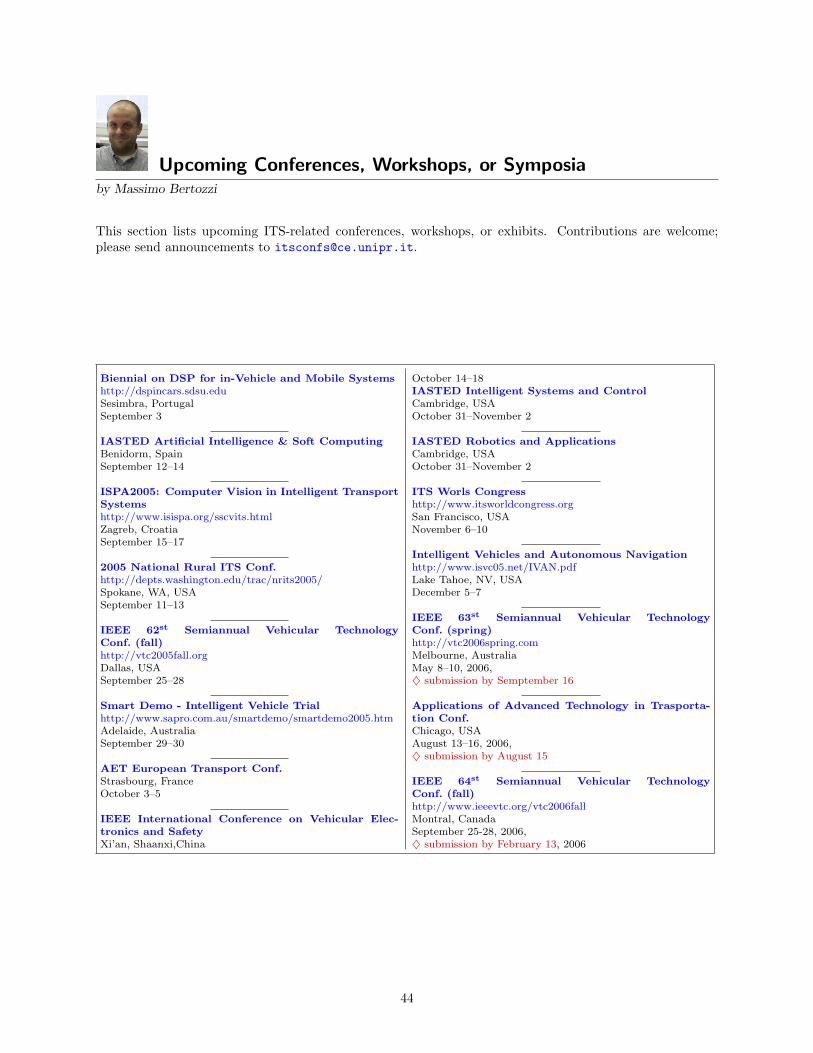
Upcoming Conferences, Workshops, or Symposiaby Massimo Bertozzi
This section lists upcoming ITS-related conferences, workshops, or exhibits. Contributions are welcome;please send announcements to [email protected].
Biennial on DSP for in-Vehicle and Mobile Systemshttp://dspincars.sdsu.eduSesimbra, PortugalSeptember 3
IASTED Artificial Intelligence & Soft ComputingBenidorm, SpainSeptember 12–14
ISPA2005: Computer Vision in Intelligent TransportSystemshttp://www.isispa.org/sscvits.htmlZagreb, CroatiaSeptember 15–17
2005 National Rural ITS Conf.http://depts.washington.edu/trac/nrits2005/Spokane, WA, USASeptember 11–13
IEEE 62st Semiannual Vehicular TechnologyConf. (fall)http://vtc2005fall.orgDallas, USASeptember 25–28
Smart Demo - Intelligent Vehicle Trialhttp://www.sapro.com.au/smartdemo/smartdemo2005.htmAdelaide, AustraliaSeptember 29–30
AET European Transport Conf.Strasbourg, FranceOctober 3–5
IEEE International Conference on Vehicular Elec-tronics and SafetyXi’an, Shaanxi,China
October 14–18IASTED Intelligent Systems and ControlCambridge, USAOctober 31–November 2
IASTED Robotics and ApplicationsCambridge, USAOctober 31–November 2
ITS Worls Congresshttp://www.itsworldcongress.orgSan Francisco, USANovember 6–10
Intelligent Vehicles and Autonomous Navigationhttp://www.isvc05.net/IVAN.pdfLake Tahoe, NV, USADecember 5–7
IEEE 63st Semiannual Vehicular TechnologyConf. (spring)http://vtc2006spring.comMelbourne, AustraliaMay 8–10, 2006,♦ submission by Semptember 16
Applications of Advanced Technology in Trasporta-tion Conf.Chicago, USAAugust 13–16, 2006,♦ submission by August 15
IEEE 64st Semiannual Vehicular TechnologyConf. (fall)http://www.ieeevtc.org/vtc2006fallMontral, CanadaSeptember 25-28, 2006,♦ submission by February 13, 2006
44