investigation into the capsizing of damaged ro-ro
TRANSCRIPT

INVESTIGATION INTO THE CAPSIZING
OF DAMAGED RO-RO PASSENGER SHIPS IN WAVES
D. Papanikolaou1, G. Zaraphonitis2,
D. Spanos3, E. Boulougouris4, E. Eliopoulou5
1 Professor, Head of Ship Design Laboratory, NTUA 2 Assistant Professor, NTUA 3 Dr.-Eng. Cand., Ship Design Laboratory, NTUA 4 Dr.-Eng. Cand., Ship Design Laboratory, NTUA 5 Dr.-Eng. Cand., Ship Design Laboratory, NTUA
ABSTRACT
The paper derives from current research of the Ship Design Laboratory of NTUA on the hydrodynamic behaviour of Ro-Ro passenger ships in seaways in view of recent regulatory developments of IMO (SOLAS 95, Regional agreement, Res. 14) to allow the physical modelling of the damage stability of Ro-Ro passenger ships in waves as an alternative to the so-called �water on deck� regulatory concept. Based on these developments, it becomes evident that the availability of properly validated computer algorithms, allowing the mathematical modelling of the capsize of a damaged ship in waves is of great importance, providing the designer with flexibility and efficiency to address systematically alternative design measures, to so improve the survivability of the ship under question in waves and to allow a �pass� through the required SOLAS regulations. The paper outlines the essence of the employed theoretical-numerical model and includes typical numerical and experimental results for a sample Ro-Ro ship in damage condition. Special emphasis has been devoted to the consideration of �sloshing effects� on the ship dynamics by use of a simplified �lump mass concept�. 1. INTRODUCTION
In recent years, following significant developments of international research on the survivability of damaged passenger ships in waves [1], parallel work has been launched at the Ship Design Laboratory of NTUA on the development of analytical-numerical methods for assessing the damage stability of ships in waves, suitable for implementation into the Ro-Ro ship design process (�Design for Safety concept� [2]). In this context, a six degrees of freedom nonlinear mathematical model for simulating the ship motions in waves has been formulated and solved numerically in the time domain, allowing the simulation of ship motions at zero forward
speed and the prediction of capsizing under specific environmental conditions. The above studies have been recently extended with the experimental investigation of the behaviour of a typical Greek Ro-Ro ferry and the systematic validation of the developed computer code [3]. The present paper provides a brief description of the employed mathematical-numerical model, followed by some typical numerical and experimental results referring to the survivability of the studied Ro-Ro vessel. More details for the derivation of the mathematical model and the numerical integration procedure can be found in earlier publications of the present authors ([4], [5]).
2. MATHEMATICAL MODEL
We consider a coupled dynamic system, consisting of the ship and the flood-water, freely oscillating in six degrees of freedom excited by an external seaway, at zero speed of advance. In order to simplify the formulation and solution of the relevant equations of motions of the above dynamic system, the mass of the flood-water is assumed to be concentrated at its centre (�lump mass concept�), moving in space under constraints imposed by the surrounding boundaries. In order to describe the water-on-deck motion relevant to the peculiarities of Ro-Ro ship design with large open deck arrangements, a simple and yet efficient way commonly adopted is to assume that its free surface remains continuously horizontal. In this way, the development of internal flood-water waves and their influence on the ship motions (�sloshing effects�) is neglected. This simplified assumption seems to be adequate, when simulating the capsizing process of a Ro-Ro ship after flooding, which is dominated by quasi-hydrostatic phenomena. It appears however essential to study the internal water motion and the limitations of the above assumption regarding the flood-water surface movement. In particular, it proves that, although in general the ship motions are predicted

fairly well, there are several cases where roll motion predictions are less satisfactory. The general conclusion is that the inaccuracy of the numerical predictions increases in those damage cases where the flood-water accumulated on the car deck remains relatively shallow. An improved and more comprehensive model for the internal water motion dynamics has been formulated at NTUA-SDL (Spanos [6]), considering the internal flood water as a lump mass moving freely over a specific path surface. This path surface Sw (see sketch) corresponds to the trace of the centre of volume of a given amount of flood-water in the damaged compartment, for all the possible
inclinations θw of the internal free surface against the car deck. According to this formulation, the lump mass motion is an additional unknown variable, to be determined by an additional equation, namely:
0=⋅′ Sww nr r&r
where Swnr is the normal vector to surface Sw, while wrv′
denotes the position vector of mw with respect to the body-fixed coordinate system (Gx΄y΄z΄). The development of the present mathematical model and the related numerical simulation algorithm has been presented elsewhere ([4], [5]) and will be only briefly commented herein for the sake of completeness. Applying Newton�s second law, and after a series of tedious algebraic operations, the equations of motion for the dynamic system consisting of the intact ship and the flood water are derived in a form suitable for the numerical integration by standard software tools. Froude-Krylov and hydrostatic forces and moments are calculated by direct numerical integration of the incident wave pressure and hydrostatic pressure respectively over the instantaneous wetted surface, taking into account the
ship motion as well as the free surface elevation due to the incident wave. Radiation forces and moments are derived from the added mass and damping coefficients of the ship, calculated by the 3D panel code NEWDRIFT [7], by use of appropriate convolution integrals to account for the transformation from frequency- to time-domain and memory effects. A quadratic roll-damping model is used to account for viscous effects. Diffraction forces and moments are approximated by the linear superposition of the elementary diffraction forces, calculated again by use of the 3D code NEWDRIFT, associated with each of the elementary waves composing the encountering wave train. The rate of inflow or outflow of flood-water &mW is calculated using an appropriate empirical water-ingress model introduced by Hutchinson ([8]). The incident wave spectrum is simulated by a finite number of harmonic waves, with properly selected frequencies and amplitudes, to account for the seaway characteristics of the assumed wave spectrum. The resulting overall system of differential equations is integrated numerically in the time domain, using computer program CAPSIMO [6], that is based on an advanced integration method. 3. EXPERIMENTAL STUDY
Systematic experimental investigations are considered necessary to gain more insight into the behaviour of vessels in the damaged condition, the mechanisms of capsizing and for validating developed simulation software tools. For this purpose, a moderate size SOLAS74 Greek Ro-Ro vessel of open car deck type (with aft & fwd casings), currently operating in the Aegean Sea, has been selected for systematic investigation within a state-funded research project of NTUA-SDL [3]. The main particulars of the vessel are presented in table 1. In figures 1 and 2 the shape of the hull and the compartmentation of the vessel are shown. A Plexiglas model of the above vessel (scale 1:30) has been constructed and tested at the towing tank of Ship Hydrodynamics Laboratory of NTUA, following the specifications of Res. 14 of SOLAS95 (Figure 3). The floating position and the principal hydrostatic characteristics of the vessel in the intact condition and after a two-compartment damage (Engine Room and Auxiliary Engine Room flooded, perm. 0.95) are summarised in tables 2 and 3 respectively. In figure 4, the righting arm vs. heel is plotted for the vessel in the intact and damage condition. Experiments have been
G mwφw
θ
Sw
θw
y΄ z΄
conducted for various combinations of initial displacement and vertical centre of gravity, with the model both in intact and damaged condition. In the latter case, the Engine Room and the Auxiliary Engine Room were open to the sea, through an opening at the starboard side, of SOLAS95-Res. 14 specifications. During the experiments, the wave elevation in the vicinity of the wave-maker and near the model was continuously measured and recorded by wave probes of capacitance type. Seven accelerometers were installed at appropriate points, measuring vertical and horizontal accelerations, from which the motions of the model in 6DOF where calculated. Additionally, the roll motion was measured by a digital inclinometer. More details on the experimental procedures and used measuring apparatus can be found in [3]. 4. DISCUSSION OF RESULTS
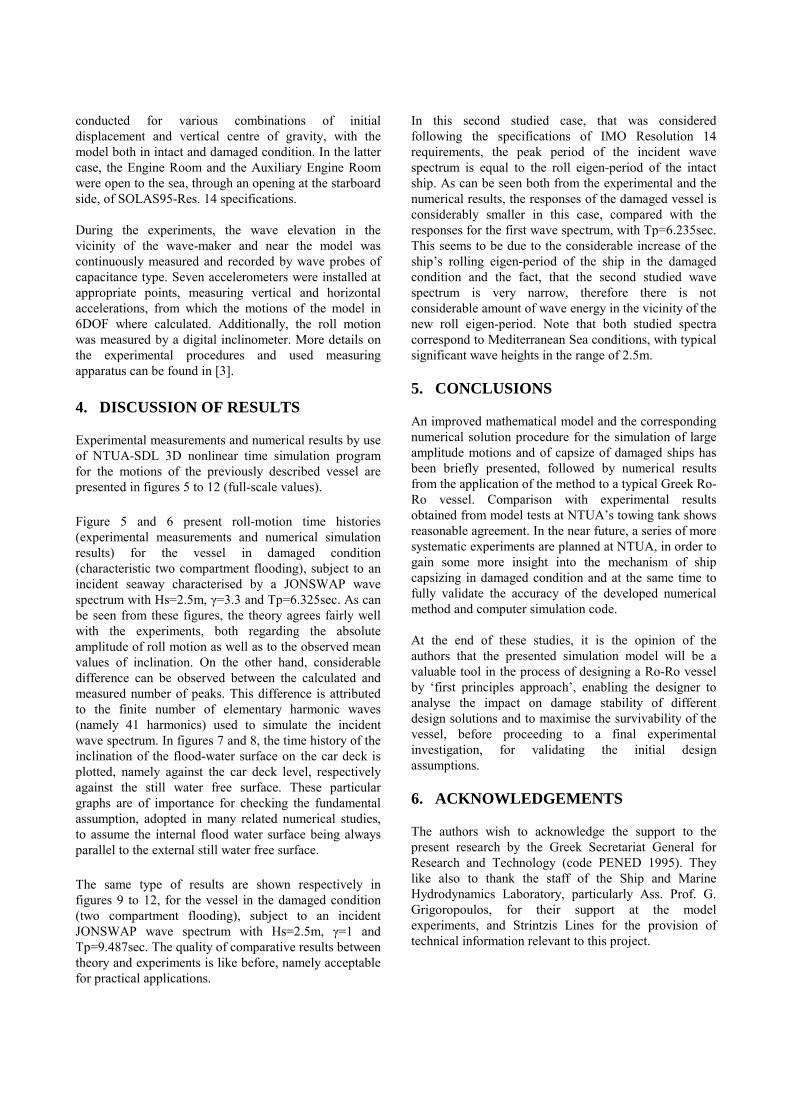
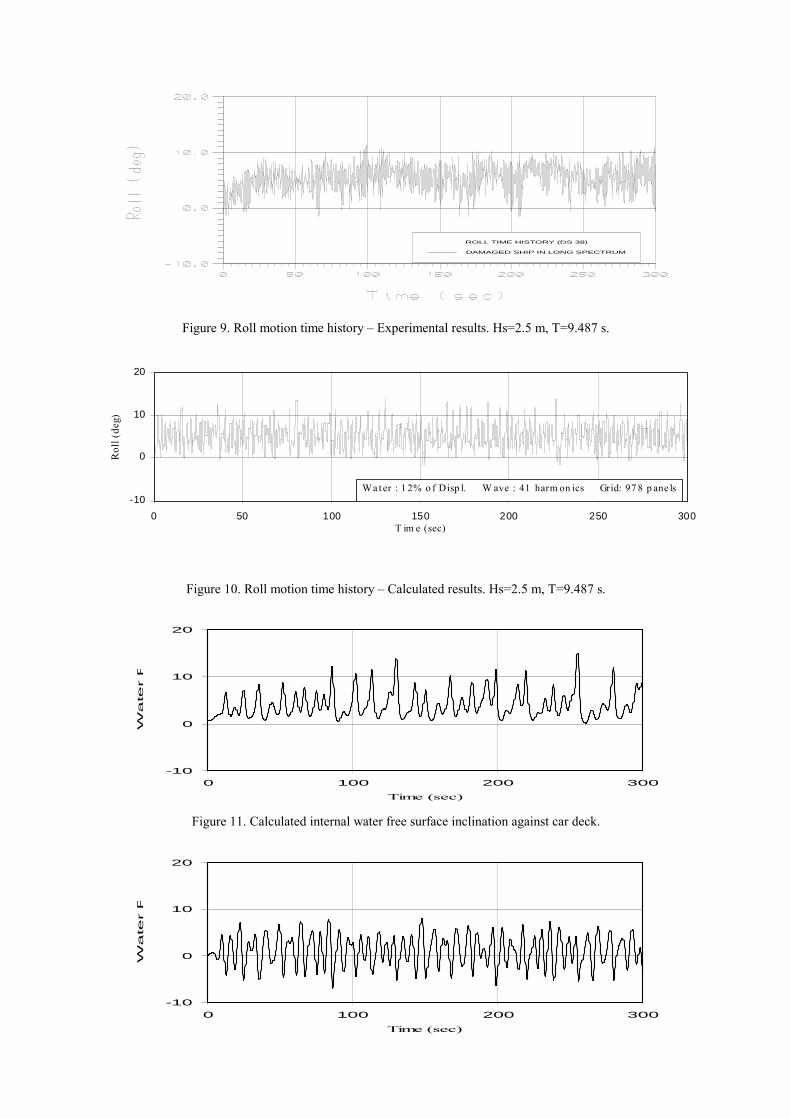
Experimental measurements and numerical results by use of NTUA-SDL 3D nonlinear time simulation program for the motions of the previously described vessel are presented in figures 5 to 12 (full-scale values). Figure 5 and 6 present roll-motion time histories (experimental measurements and numerical simulation results) for the vessel in damaged condition (characteristic two compartment flooding), subject to an incident seaway characterised by a JONSWAP wave spectrum with Hs=2.5m, γ=3.3 and Tp=6.325sec. As can be seen from these figures, the theory agrees fairly well with the experiments, both regarding the absolute amplitude of roll motion as well as to the observed mean values of inclination. On the other hand, considerable difference can be observed between the calculated and measured number of peaks. This difference is attributed to the finite number of elementary harmonic waves (namely 41 harmonics) used to simulate the incident wave spectrum. In figures 7 and 8, the time history of the inclination of the flood-water surface on the car deck is plotted, namely against the car deck level, respectively against the still water free surface. These particular graphs are of importance for checking the fundamental assumption, adopted in many related numerical studies, to assume the internal flood water surface being always parallel to the external still water free surface. The same type of results are shown respectively in figures 9 to 12, for the vessel in the damaged condition (two compartment flooding), subject to an incident JONSWAP wave spectrum with Hs=2.5m, γ=1 and Tp=9.487sec. The quality of comparative results between theory and experiments is like before, namely acceptable for practical applications.
In this second studied case, that was considered following the specifications of IMO Resolution 14 requirements, the peak period of the incident wave spectrum is equal to the roll eigen-period of the intact ship. As can be seen both from the experimental and the numerical results, the responses of the damaged vessel is considerably smaller in this case, compared with the responses for the first wave spectrum, with Tp=6.235sec. This seems to be due to the considerable increase of the ship�s rolling eigen-period of the ship in the damaged condition and the fact, that the second studied wave spectrum is very narrow, therefore there is not considerable amount of wave energy in the vicinity of the new roll eigen-period. Note that both studied spectra correspond to Mediterranean Sea conditions, with typical significant wave heights in the range of 2.5m. 5. CONCLUSIONS
An improved mathematical model and the corresponding numerical solution procedure for the simulation of large amplitude motions and of capsize of damaged ships has been briefly presented, followed by numerical results from the application of the method to a typical Greek Ro-Ro vessel. Comparison with experimental results obtained from model tests at NTUA�s towing tank shows reasonable agreement. In the near future, a series of more systematic experiments are planned at NTUA, in order to gain some more insight into the mechanism of ship capsizing in damaged condition and at the same time to fully validate the accuracy of the developed numerical method and computer simulation code. At the end of these studies, it is the opinion of the authors that the presented simulation model will be a valuable tool in the process of designing a Ro-Ro vessel by �first principles approach�, enabling the designer to analyse the impact on damage stability of different design solutions and to maximise the survivability of the vessel, before proceeding to a final experimental investigation, for validating the initial design assumptions. 6. ACKNOWLEDGEMENTS
The authors wish to acknowledge the support to the present research by the Greek Secretariat General for Research and Technology (code PENED 1995). They like also to thank the staff of the Ship and Marine Hydrodynamics Laboratory, particularly Ass. Prof. G. Grigoropoulos, for their support at the model experiments, and Strintzis Lines for the provision of technical information relevant to this project.

7. REFERENCES
1. Vassalos, D., ‘A realistic approach to assessing the damage survivability of passenger ships’, Trans. SNAME, vol. 102, pp. 367-394, 1994.
2. Vassalos, D, �The European Thematic Network SAFER-EURORO – Design for Safety’, Proc. of Annual Workshop held at MARIN, Wageningen, 1998.
3. Papanikolaou, A., et al., �Analysis of the Dynamic Stability of Ro-Ro vessels and Investigation into the Probability of Capsizing in High Seas� Final Report to the Greek Secretariat General for Research and Technology (code ΠΕΝΕ∆ 1995), Athens, 1998 (in Greek).
4. Zaraphonitis, G., Papanikolaou, A. D., Spanos, D., ‘On a 3-D mathematical model of the damage stability of ships in waves’, Proc. 6th Int. Conference Stability of Ships and Ocean Structures (STAB�97), Varna, September 1997.
5. Spanos, D., Papanikolaou, A. D., Zaraphonitis, G., ‘On a 6DOF mathematical model for the simulation of ship capsize in waves’, Proc. 8th IMAM Congress on Marine Technology, Istanbul, November 1997.
6. Spanos, D., ‘Theoretical-numerical modelling of large amplitude ship motions and of capsizing in heavy seas’, Dr. Eng. Thesis, Dep. of Naval Architecture, NTUA, in progress.
7. Papanikolaou, A., Zaraphonitis, G, ‘NEWDRIFT: The six DOF 3D diffraction theory program of
NTUA-SDL for the calculation of motions and loads of arbitrarily shaped bodies in waves’, NTUA-SDL Rep., Athens, 1989.
8. Hutchinson, L., ‘Water on-deck accumulation studies by the SNAME ad hoc Ro-Ro safety panel’, Workshop on Numerical & Physical Simulation of
Ship Capsize in Heavy Seas, University of Strathclyde, 1995.
Figure 1. Hull shape of studied ship
ENGINE ROOM AUX. ENGINE ROOM
GENERATOR ROOM
Figure 2. Vessel�s compartmentation below car deck and studied damage case

Table 1. Ship’s Main Particulars
Main Dimensions Intact Condition Length Btw Perpendiculars 110.0 m Draught 5.15 m Breadth Moulded 17.2 m Trim Even Keel Depth Moulded (BHD deck) 6.60 m GM (solid) 1.568 m Draught 5.15 m Displacement 5098 t Damage Condition Number of WT BHDs 12 Engine & Auxiliary Rooms flooded
Figure 3. Photo of ship model tested at NTUA�s Towing Tank, scale 1:30
Table 2. Ship in Intact Condition
Floating Status Draft FP 4.674m Heel Zero Draft MS 4.781m Equil Yes Draft AP 4.866m Wind 0.0 kn Trim 0.192m AFT Wave No LCG 51.832 KG 6.914 m Displacer Status Item Status Spgr Displ
(MT) LCB (m)
HULL.C Intact 1.025 4538.56 52.232 SubTotals: 4538.56 52.232
GM(Solid) 2.068m F/S Corr 0.110m GM(Fluid) 1.958m KMT 8.982 m TPcm 14.70
TCB (m)
VCB (m)
Eff /Perm
0.000 2.861 1.000 0.000 2.861

Table 3. Ship in Damage Condition
Floating Status Draft FP 5.768m Heel port 0.09 deg. GM(Solid) 2.252m Draft MS 6.086m Equil Yes F/S Corr 0.000m Draft AP 6.404m Wind 0.0 kn GM(Fluid) 2.252m Trim aft 0.32 deg. Wave No KMT 9.166 m LCG 51.880f KG 6.914 m TPcm 12.50 Displacer Status (compliance with SOLAS 90 regulations) Item Status Spgr Displ
(MT) LCB (m)
TCB (m)
VCB (m)
Eff /Perm
HULL.C Intact 1.025 6,652.11 49.609f 0.008p 3.701 1.000 ENGINEROOM.C Flooded 1.025 -1,302.75 39.643f 0.008p 3.623 0.950 AUXENGROOM.C Flooded 1.025 -836.05 52.974f 0.027p 3.707 0.950 SubTotals: 4,513.31 51.862f 0.005p 3.723
0.00
0.25
0.50
0.75
1.00
1.25
1.50
1.75
2.00
0 5 10 15 20 25 30 35 40 45 50 55 60Heel (degrees)
GZ
(m)
Intact Condition
Damage Condition
Figure 4. Righting Arm Curves vs. Heel in Intact and Damage Condition

ROLL TIME HISTORY (DS 36)
DAMAGED SHIP IN SHORT SPECTRUM
Figure 5. Roll motion time history � Experimental results. Hs=2.5 m, T=6.325 s.
Figure 6. Roll motion time history � Calculated results. Hs=2.5 m, T=6.325 s.
-10
0
10
20
0 100 200 300Time (sec)
Wa
ter R
Figure 7. Calculated internal water free surface inclination against car deck.
-10
0
10
20
0 100 200 300Time (sec)
Wa
ter R
Figure 8. Calculated internal water free surface inclination against still water free surface.
-10
0
10
20
0 50 100 150 200 250 300Time (sec)
Rol
l (de
g)
W at e r : 12 % of Displ. Wa ve : 41 h arm on ics Grid: 97 8 pa nels
ROLL TIME HISTORY (DS 38)
DAMAGED SHIP IN LONG SPECTRUM
Figure 9. Roll motion time history � Experimental results. Hs=2.5 m, T=9.487 s.
Figure 10. Roll motion time history � Calculated results. Hs=2.5 m, T=9.487 s.
-10
0
10
20
0 100 200 300Time (sec)
Wa
ter R
Figure 11. Calculated internal water free surface inclination against car deck.
-10
0
10
20
0 100 200 300Time (sec)
Wate
r R
-10
0
10
20
0 50 100 150 200 250 300T im e (sec)
Rol
l (de
g)
Wa t er : 1 2% o f Disp l. W ave : 41 harm on ics Grid: 97 8 p ane ls

Figure 12. Calculated internal water free surface inclination against still water free surface.