jordan hodge jordan lyford wilson schreiber. background problem statement solution software 2
Post on 19-Dec-2015
218 views
TRANSCRIPT

Ground Control
Jordan HodgeJordan LyfordWilson Schreiber

2
Contents
Background Problem Statement Solution Software

3
Background
VTC developing CubeSat, transmits data Continuing where previous groups have left off
Have to follow CubeSat to receive data
Existing 3-meter parabolic dish antenna
Low orbit satellite revolves around earth in minutes, seen for short time per orbit
Existing solutions EGIS Bi-axial antenna positioning system

4
EGIS Rotor and Control
Equipment-Gesellschaft für Internationale Elektronik Systeme
Cost: Software $400 Data Interface $1,100 Hardware $2,700 (EL-40°, AZ-180°) Extension $2,200 (EL-90°, AZ-360°) Rotor Hardware Mount $400 Satellite Dish Mount $400
Total $7,200

5
SatPC32
A free software available online for tracking satellites. Updates on screen and controls rotor to point to position satellite
Uses orbit of satellite and observer position
Many types of rotors to select for output
Uses Serial port or Parallel port on PC

SatPC32
Screen Shot of SatPC32 in use
WinListen predicts path
6

7
Problem
Track a low orbit satellite such as a CubeSat from horizon to horizon is as little as 30 seconds180°/30 seconds=6°/sec
Move a 3 meter satellite dish 360° Azimuth (left/right) 90° Elevation (up/down)
Interface to PC running SatPC32

8
Solution
Gears and motors, motor controllers Freescale Coldfire 32-bit
Microcontroller Serial interface with SatPC32 using
EGIS controls and a serial port Magnetic Encoders measure position
of dish Use/Modify existing designs for
elevation and azimuth control

9
System Diagram
Micro-controller
EL - Motor
ControllerAZ -
Motor Controlle
r
Limit Switches
RS232
SatPC32
PositionEncoders

10
Mechanical Concepts
Azimuth A left to right angle
measurement from a fixed point (north in navigation)
Worm Gears Speed (Gear Ratio) Torque Modify existing designs

11
Power Distribution
Position Encoders
AC
Motor Controlle
r
Motor Controlle
r
12Vdc10Amp
FUSE
5Vdcregulat
or
Micro-controller
A
E
Circuit Protectio
n
12Vdc10Amp
FUSE
PC Running SatPC32
Limit Switc
h
Limit Switc
h
12
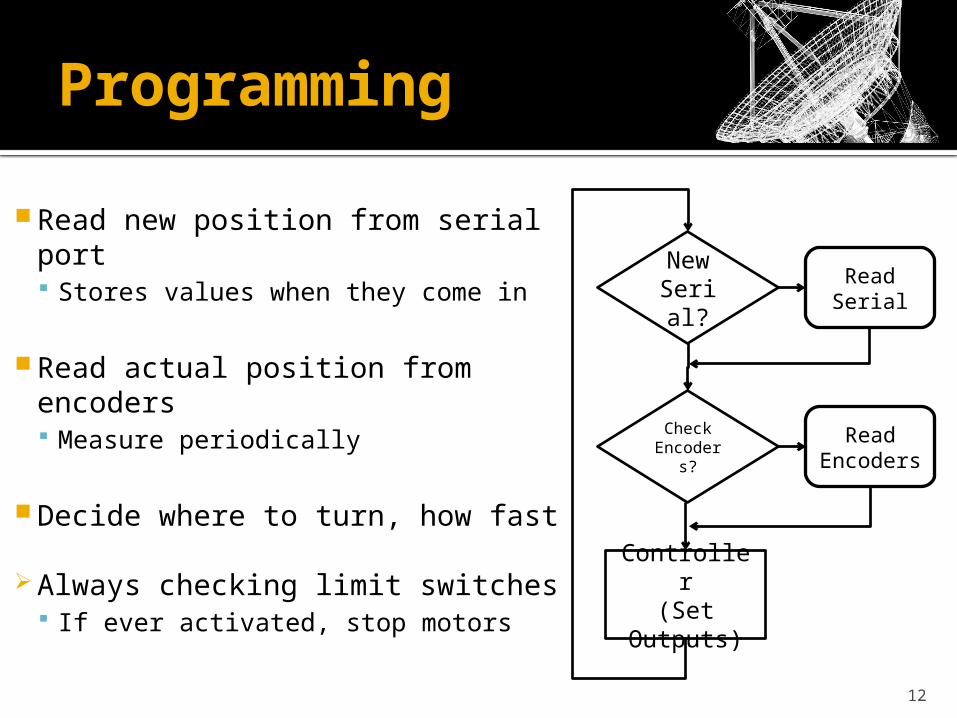
Programming
Read new position from serial port Stores values when they come in
Read actual position from encoders Measure periodically
Decide where to turn, how fast
Always checking limit switches If ever activated, stop motors
Controller(Set
Outputs)
New Serial
?
Check Encoder
s?
ReadSerial
Read Encoders

Questions?