me 581: simulation of mechanical system
TRANSCRIPT

1 Copyright © 20xx by ASME
ME 581: SIMULATION OF MECHANICAL SYSTEM
KINEMATIC ANALYSIS OF DISPLACMENT AMPLIFING COMPLIANT MECHANISM USING HAUG’S METHOD
Ahmad Emam Graduate Student
Pennsylvania State University
ABSTRACT
Displacement-amplifying compliant mechanisms (DaCMs) reported in literature are widely used for actuator applications (HOWELL, 2001). This paper will do a kinematic analysis on one kind of DaCM with Haug’s method to verify the mechanism output/input displacement ratio.
INTRODUCTION Compliant mechanisms (HOWELL, 2001) are becoming increasingly popular due to their inherent advantages over the traditional rigid-body mechanisms and their amenability to small-sized systems of the rapidly growing areas of micro- and nanosystems (ANANTHASURESH & AND HOWELL, 2005). Displacement-amplifying compliant mechanisms DaCMs are used to get large displacement at the output as compared to that at the input (KRISHNAN & ANANTHASURESH, 2008). In this paper, we will review the mechanical performance of one kind of DaCM with kinematic analysis of Haug’s method. Using Haug’s method we developed a MATLAB code to numericaly simulate the mechanism and estimate the exact output/input displacement ratio.
TOPOLOGY AND MOBILITY DaCM model that we used in this study can be found
online in one of free 3D models library. It claims to have 15:1 input/output displacement ratio.
The topology of the system can be interpreted as in Figure2. This model has 1 DOF of freedom, but because of some technical issues the Jacobian’s of this system will always be singular and that cause a problem with Haug’s method. So, we switched to an alternative interpretation of the model Figure3. It have the same DOF and works great with the method. We replaced all three links 4,5 and 6 with a slider mechanism as it should be represented in the CM designs.
Figure 1 DaCM model for the study
Figure 2 Topology and skeletal diagram of the model

2 Copyright © 20xx by ASME
COORDINATES The mechanism has 3 links other than the ground and
hence nine coordinates. The coordinates of the ith link are given as follows.
The origin of local coordinate frames attached to the links
with respect to the global coordinate frame are given by {ri}. the coordinates of a point ‘P’ attatched to link ‘i’ with respect to the global coordinate and local coordinates are given by {ri}P and {si}`P ,respectivly. As in the following relationship.
Where,
Table 1 Estimated global coordinates of the system
Link 1 2 3 4
{ri} xi 0 -22.36 -8 0
yi 0 0 9 27.25
Table 2 Estimated local coordinates of the system
{s1}’ {s2}’ {s3}’ {s4}’ A {-22.63 , 0 } { 0, 0 } B {7.75 , 0 } C {0,0} D {14.88 , 16 } {29.75,7} E {14.88,7} F {0,0}
W {40,-6} Z {0,19.75}
CONSTRAINT VECTOR The mechanism has two revolute, two double revolute and
one prismatic joints hence eight kinematic constraints. Also, one driver constraints must be specified as the system has 1 degree of freedom (DOF).
Where,
and the driver constraints specify the attitude of link 2.
JACOBIAN The Jacobian of the system can be derived using the
following general formulas for each joint. For simple revolute,
Figure 3 Alternative interpretation of the System with local coordinates.
3 Copyright © 20xx by ASME
For double revolute,
For slider,
The Jacobian of the system must be a square matrix with
rows and columns equals to the number of the constraints vector. In this system, the Jacobian is 9x9 matrix.
POSITION SOLUTION The position solution of the system may be obtained by
giving an initial guess and then employing Newton-Raphson equation with the constraint vector and the Jacobian to find the position solutions at specific attitude values of link2 (0 to 0.1π).
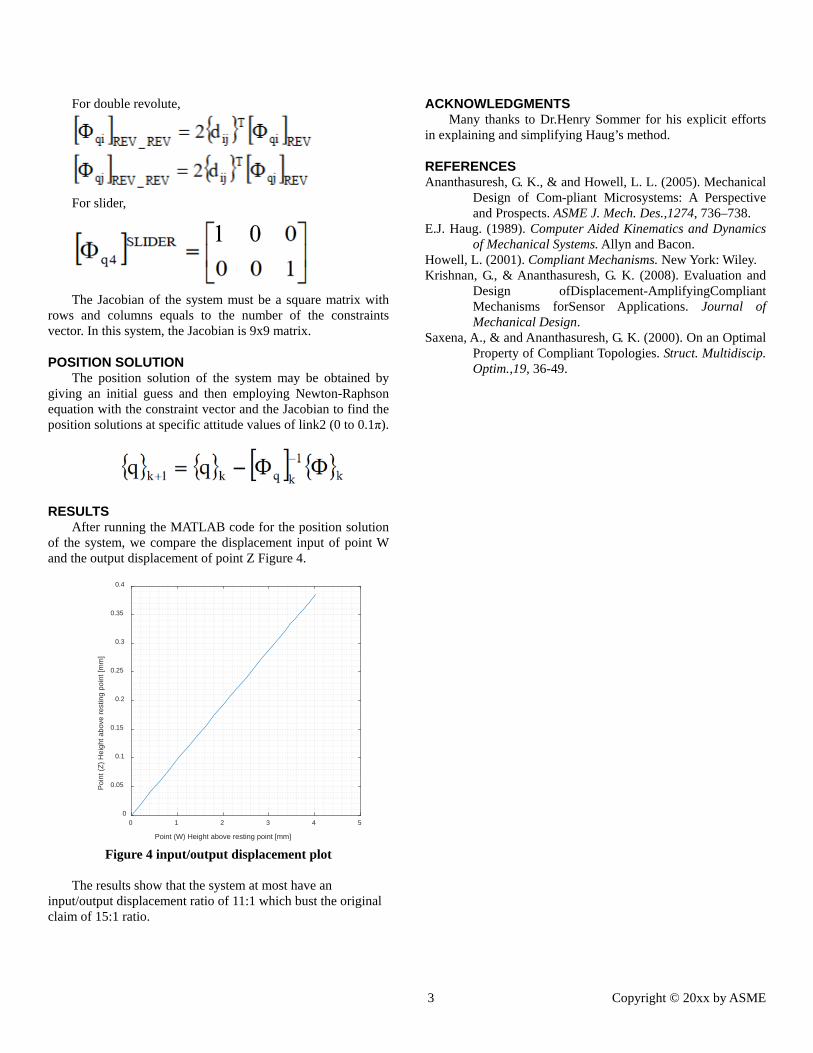
RESULTS After running the MATLAB code for the position solution
of the system, we compare the displacement input of point W and the output displacement of point Z Figure 4.
0 1 2 3 4 5
Point (W) Height above resting point [mm]
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Poin
t (Z)
Hei
ght a
bove
rest
ing
poin
t [m
m]
Figure 4 input/output displacement plot
The results show that the system at most have an
input/output displacement ratio of 11:1 which bust the original claim of 15:1 ratio.
ACKNOWLEDGMENTS Many thanks to Dr.Henry Sommer for his explicit efforts
in explaining and simplifying Haug’s method.
REFERENCES Ananthasuresh, G. K., & and Howell, L. L. (2005). Mechanical
Design of Com-pliant Microsystems: A Perspective and Prospects. ASME J. Mech. Des.,1274, 736–738.
E.J. Haug. (1989). Computer Aided Kinematics and Dynamics of Mechanical Systems. Allyn and Bacon.
Howell, L. (2001). Compliant Mechanisms. New York: Wiley. Krishnan, G., & Ananthasuresh, G. K. (2008). Evaluation and
Design ofDisplacement-AmplifyingCompliant Mechanisms forSensor Applications. Journal of Mechanical Design.
Saxena, A., & and Ananthasuresh, G. K. (2000). On an Optimal Property of Compliant Topologies. Struct. Multidiscip. Optim.,19, 36-49.
4 Copyright © 20xx by ASME
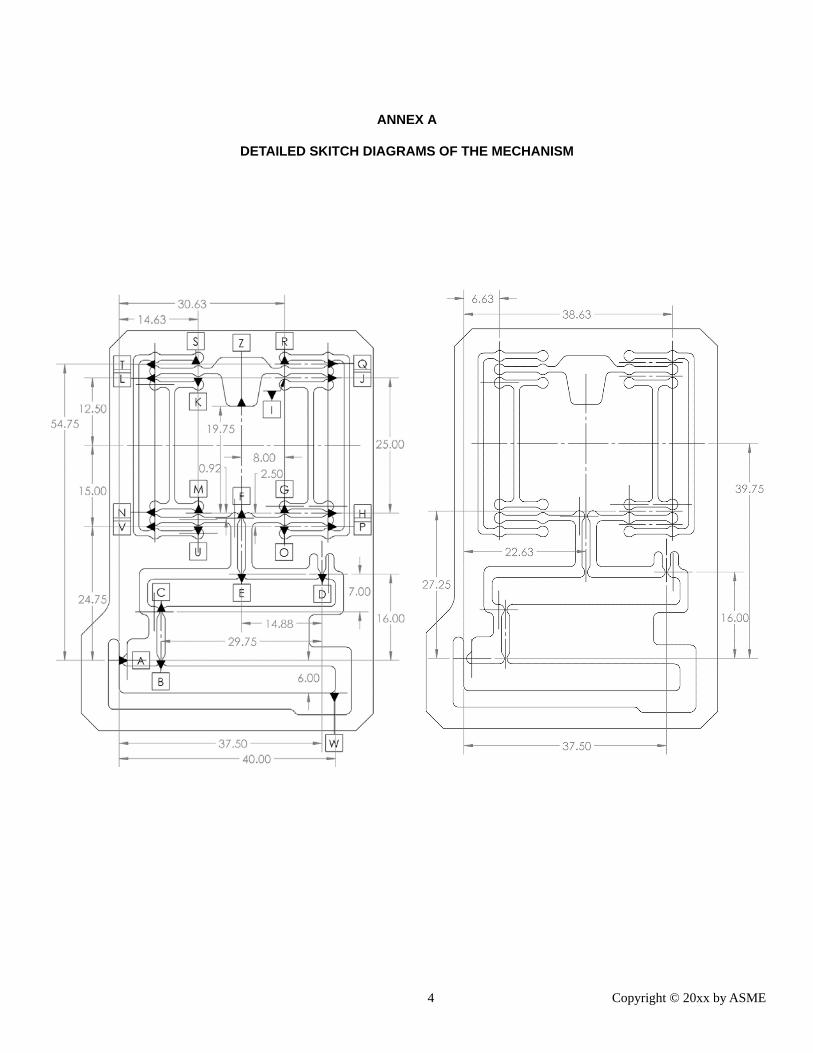
ANNEX A
DETAILED SKITCH DIAGRAMS OF THE MECHANISM

5 Copyright © 20xx by ASME
ANNEX B
THE JACOBIAN MATRIX OF THE SYSTEM

6 Copyright © 20xx by ASME
ANNEX C
MATLAB CODES
% cm_main_sc.m - compliant mechanism for ME 581 % initialize cm_ini_sc % one crank revolution tpr = pi; % 20 degree freedom dt = tpr / 60; % 180 positions %tpr = 0; % single position % starting position phi2_0 = 0 * d2r; % start at zero % mechanism animation plots s2anim = [0 0 40 40 0; 0 -6 -6 0 0]; s3anim = [0 30 30 -3 -3 0; 0 0 7 7 0 0]; s4anim = [0 12 12 -12 -12 0; 0 0 19 19 0 0]; % timer loop keep = []; keep_q = []; for t = 0 : dt : tpr, phi2_0 = 0.1*sin(t); % kinematics cm_kin_sc; % save kinematics ang2 = phi2 / d2r; ang3 = phi3 / d2r; detJAC = det(JAC); y2W = r2W(2)+6; y4Z = r4Z(2)-46.08; keep = [ keep ; ang2 ang3 detJAC y2W y4Z ]; keep_q = [ keep_q ; q' ]; % mechanism animation drBC = [r2B r3C]; drEF = [r3E r4F]; r2Shape = r2 + A2*s2anim; r3Shape = r3 + A3*s3anim; r4Shape = r4 + A4*s4anim; plot(r2Shape(1,:),r2Shape(2,:)) hold on plot(r3Shape(1,:),r3Shape(2,:)) plot(r4Shape(1,:),r4Shape(2,:)) plot(drBC(1,:),drBC(2,:)) plot(drEF(1,:),drEF(2,:)) plot(0,46.08,'.') axis([-30 30 -10 50],'square') hold off pause(0.1)

7 Copyright © 20xx by ASME
end % plot ang2 = keep(:,1); ang3 = keep(:,2); detJAC = keep(:,3); y2W = keep(:,4); y4Z = keep(:,5); Screw = y2W/0.5; figure plot(y2W,y4Z) xlabel('Point (W) Height above resting point [mm]') ylabel('Point (Z) Height above resting point [mm]') axis('square') grid minor figure plot(Screw,y4Z) xlabel('Screw Cycles [0.5 pitch]') ylabel('Point (Z) Height above resting point [mm]') axis('square') grid minor figure plot(y2W,detJAC) xlabel('Screw Cycles [0.5 pitch]') ylabel('Point (Z) Height above resting point [mm]') axis('square') grid minor

8 Copyright © 20xx by ASME
% cm_ini_sc.m - compliant mechanism for ME 581 % initialize constants and assembly guesses % general constants d2r = pi / 180; R = [ 0 -1 ; 1 0 ]; % mechanism constants s2pA = [ 0 0 ]'; s2pB = [ 7.75 0 ]'; s2pW = [ 40 -6 ]'; s3pC = [ 0 0 ]'; s3pD = [ 29.75 7 ]'; s3pE = [ 14.88 7 ]'; s4pF = [ 0 0 ]'; s4pZ = [ 0 19.75 ]'; r1A = [ -22.63 0 ]'; r1D = [ 14.88 16 ]'; % double revolute lengths BC = 9; EF = 10.33; % initial guesses phi2 = 0 * d2r; phi3 = 0 * d2r; phi4 = 0 * d2r; q(1,1) = -22.36; q(2,1) = 0; q(3,1) = phi2; q(4,1) = -8; q(5,1) = 9; q(6,1) = phi3; q(7,1) = 0; q(8,1) = 27.25; q(9,1) = phi4; % driver for crank - phi2 = phi2_0 + w2*t phi2_0 = 0 * d2r; w2 = 0; % +60 * 2 * pi / 60; % 60 rpm CCW, convert to rad/sec t = 0; % bottom of cm_ini_sc

9 Copyright © 20xx by ASME
% cm_phi_sc.m - compliant mechanism for ME 581 % evaluate constraints and Jacobian for crank driving constraint % global location of local frames and rotation matrices r2 = q(1:2); phi2 = q(3); r3 = q(4:5); phi3 = q(6); r4 = q(7:8); phi4 = q(9); A2 = [ cos(phi2) -sin(phi2); sin(phi2) cos(phi2) ]; A3 = [ cos(phi3) -sin(phi3); sin(phi3) cos(phi3) ]; A4 = [ cos(phi4) -sin(phi4); sin(phi4) cos(phi4) ]; B2 = R * A2; B3 = R * A3; B4 = R * A4; % global locations of points r2A = r2 + A2*s2pA; r2B = r2 + A2*s2pB; r2W = r2 + A2*s2pW; r3C = r3 + A3*s3pC; r3D = r3 + A3*s3pD; r3E = r3 + A3*s3pE; r4F = r4 + A4*s4pF; r4Z = r4 + A4*s4pZ; x4 = r4(1); % double revolute dij = rjP - riP d23BC = r3C - r2B; d34EF = r4F - r3E; % revolute constraints PHI(1:2,1) = r2A - r1A; PHI(3,1) = d23BC'*d23BC-BC^2; PHI(4:5,1) = r3D - r1D; PHI(6,1) = d34EF'*d34EF-EF^2; PHI(7:8,1) = [ x4 phi4 ]'; % crank driver constraint PHI(9,1) = phi2 - phi2_0 - w2*t; % Jacobian by rows JAC = zeros(9,9); % Link2 JAC(1:2,1:3) = [ eye(2) B2*s2pA ]; JAC(3,1:3) = -2*d23BC'*[ eye(2) B2*s2pB ]; % Link3 JAC(3,4:6) = 2*d23BC'*[ eye(2) B3*s3pC ]; JAC(4:5,4:6) = [ eye(2) B3*s3pD ]; JAC(6,4:6) = -2*d34EF'*[ eye(2) B3*s3pE ];

10 Copyright © 20xx by ASME
% Link4 JAC(6,7:9) = 2*d34EF'*[ eye(2) B4*s4pF ]; JAC(7,7) = 1; JAC(8,9) = 1; % driver constraint in Jacobian JAC(9,3) = 1; % current results current_crank = phi2 / d2r; % bottom of cm_phi_sc % cm_kin_sc.m - compliant mechanism for ME 581 % positon, velocity, and acceleration % Newton-Raphson position solution assy_tol = 1e-5; cm_phi_sc; while max(abs(PHI)) > assy_tol, q = q - inv(JAC) * PHI; cm_phi_sc; end % bottom of cm_kin_sc

11 Copyright © 20xx by ASME

ME 581: Simulation of Mechanical
Systems Kinematic and Dynamic Analysis of an
Excavator Arm
Nicholas Holowsko
Abstract
Excavator(or Track hoe) arms are designed to
transmit high amounts of force for reshaping the
environment around it, and to give the operator a
large degree of movement and accuracy in the
process. This study attempts to piece together the
parts of the arm and their purpose, while analyzing
the motion of the machine as a whole. Here, the
model is based off of a Link-Belt 800LX excavator
model, and all assumptions and measurements are
based off of technical specifications for this vehicle
model. This paper will present a mechanism
overview, a kinematic and dynamic analysis, and a
discussion on model limitations.
2. Methodology
2.1. Initial Conditions
Initial measurements and performance
requirements for this model were based off of a
technical specifications sheet for an excavator
model. Weights and geometry for the main link
arms were taken from here. Figure 1 shows a side
view from the specifications sheet[1].
This excavator, as with most designs, can be
approximated in 2D with 12 Links. 1 link acts as
the ground, 3 are the main arm, the bucket arm, and
the bucket itself, 2 comprise the linkages
connecting the bucket to the bucket arm, and 6 links
make up the 3 hydraulic arms. Additionally, 12
revolute links connect the rigid steel parts of the
arm, and 3 prismatic links connect each of the
hydraulic pistons. Links and joint labels are shown
in figure 2.
Mass and link size was obtained from the
specifications sheet and simplified for the sake of
this project. Results are shown in table 1. Bucket
linkages were not on the spec sheet and mass was
estimated using polygeom.m, areas, and the density
of steel. Bucket linkage mass is doubled in the
model because they typically appear on both sides
of the mechanism. The hydraulic arm mass is split
evenly between both links connecting the prismatic.
The mass of the hydraulic actuator is doubled for
links 7 and 8 as it appears on both sides of the
mechanism.
Description Link Mass(kg)
Main Arm 2 8000
Bucket Arm 3 4000
Bucket Arm 4 3000
Bucket Linkages 5,6 100
Hydraulic Arms 7,8,9,10,11,12 800
Table 1: Initial mass data for the links
Additional information taken from the spec sheet
includes engine output and hydraulic system flow
rate. The engine for this excavator model has a max
output horsepower of 444 HP. This will later be
used to confirm that dynamic results are reasonable.
Hydraulic pump flow was found to total 264.2 gpm.
Divided by 4 hydraulic cylinders with ~8 inch
bores, the hydraulic pistons could extend at 0.13
m/s at max.
Figure 2: Link-Joint model of excavator
Figure 1: Side view of Link-Belt excavator
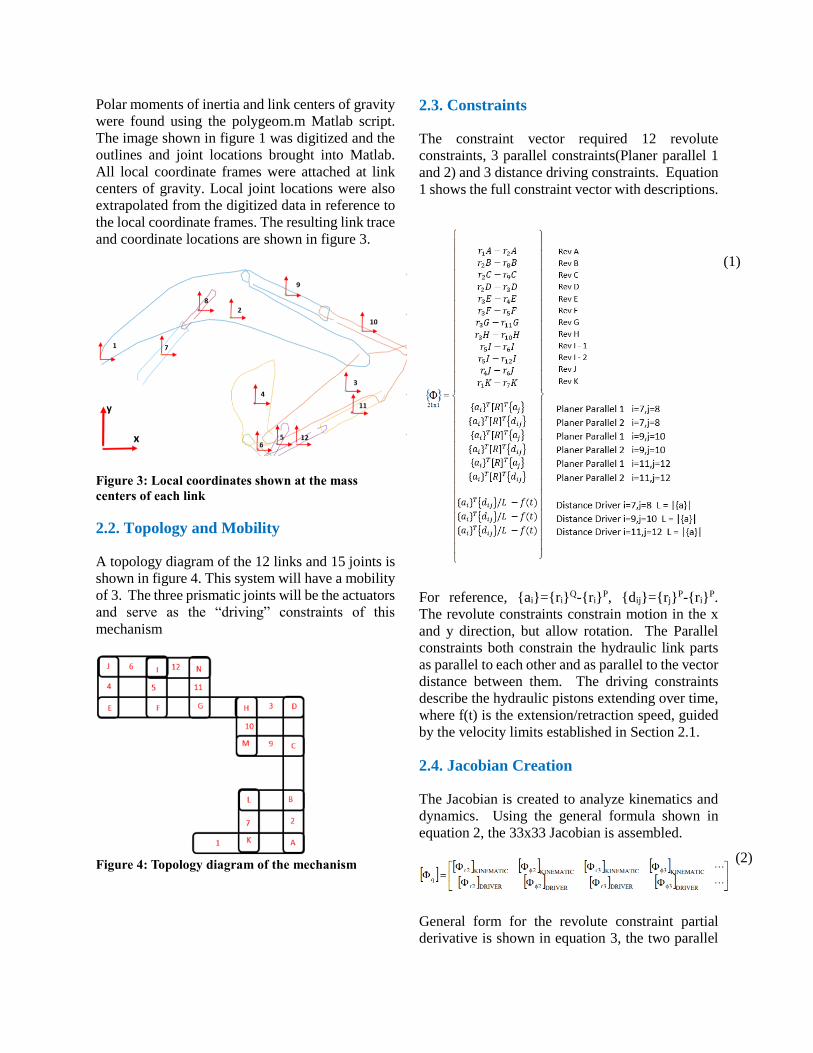
Polar moments of inertia and link centers of gravity
were found using the polygeom.m Matlab script.
The image shown in figure 1 was digitized and the
outlines and joint locations brought into Matlab.
All local coordinate frames were attached at link
centers of gravity. Local joint locations were also
extrapolated from the digitized data in reference to
the local coordinate frames. The resulting link trace
and coordinate locations are shown in figure 3.
Figure 3: Local coordinates shown at the mass
centers of each link
2.2. Topology and Mobility
A topology diagram of the 12 links and 15 joints is
shown in figure 4. This system will have a mobility
of 3. The three prismatic joints will be the actuators
and serve as the “driving” constraints of this
mechanism
Figure 4: Topology diagram of the mechanism
2.3. Constraints
The constraint vector required 12 revolute
constraints, 3 parallel constraints(Planer parallel 1
and 2) and 3 distance driving constraints. Equation
1 shows the full constraint vector with descriptions.
For reference, {ai}={ri}Q-{ri}P, {dij}={rj}P-{ri}P.
The revolute constraints constrain motion in the x
and y direction, but allow rotation. The Parallel
constraints both constrain the hydraulic link parts
as parallel to each other and as parallel to the vector
distance between them. The driving constraints
describe the hydraulic pistons extending over time,
where f(t) is the extension/retraction speed, guided
by the velocity limits established in Section 2.1.
2.4. Jacobian Creation
The Jacobian is created to analyze kinematics and
dynamics. Using the general formula shown in
equation 2, the 33x33 Jacobian is assembled.
General form for the revolute constraint partial
derivative is shown in equation 3, the two parallel
(1)
(2)

constraint partial derivative forms are shown in
equation 4, and the driver constraint partial
derivative form is shown in equation 5.
Using the completed Jacobian, Newton-Raphson
was used to verify coordinates and iterate for
corrections in position[2].
2.5. Velocity and Acceleration Solutions
Solving for velocity requires the inverse of the
Jacobian, as well as ν and γ. The general form of
the velocity and acceleration solution respectively
is found in equations 6 and 7.
The general form for ν is 0 for all constraints except
for the second planar parallel constraints. This is
shown in equation 8.
The γ vector is populated by the revolute
constraints, parallel-2 constraints, and the drivers.
These are shown in equations 9, 10, and 11
respectively.
In the model, these variables are populated after
Newton-Raphson confirms position at each
iteration[2].
2.6. Inverse Kinematics Results
Inverse kinematic results shown here are
dependent on decisions made with the driver
constraints. This is a mechanism with a high
degree of freedom, and kinematic and dynamic
results are heavily dependent on magnitude and
direction of the hydraulic actuation. All solutions
shown were based on two sets of motions. The
first scenario is a “downwards lowering” of the
arm, shown in figure 5. The second motion is an
up and outward “swinging” of the arm, shown in
figure 6.
Figure 5: The arm at resting position(left) and at the
final position “digging downwards”(right)
Figure 6: The arm at resting position(left) and at the
final position “swinging up and out”(right)
Consistent kinematic results include the angle
change in the three main links(Main arm, bucket
arm, and bucket) as a function of their respective
hydraulic cylinder extension shown in figure 7.
The bucket moves rapidly as a function of its
(3)
(4)
(5)
(6)
(7)
(8)
(9)
(10)
(11)
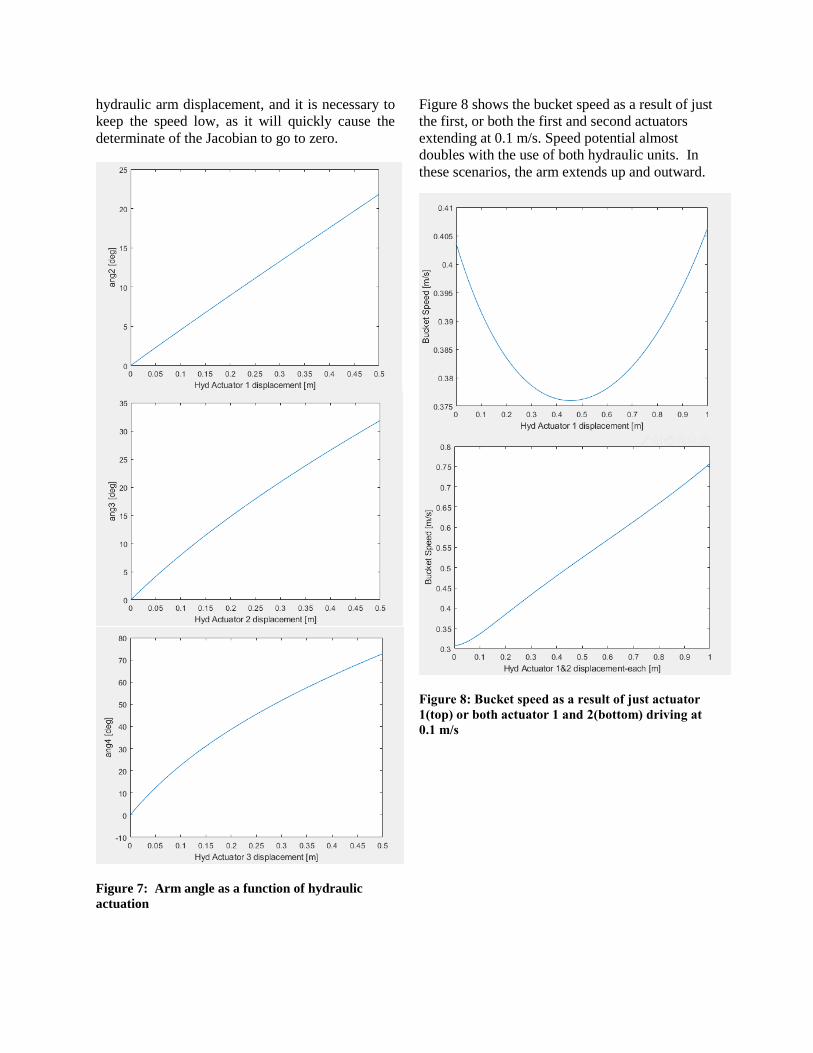
hydraulic arm displacement, and it is necessary to
keep the speed low, as it will quickly cause the
determinate of the Jacobian to go to zero.
Figure 7: Arm angle as a function of hydraulic
actuation
Figure 8 shows the bucket speed as a result of just
the first, or both the first and second actuators
extending at 0.1 m/s. Speed potential almost
doubles with the use of both hydraulic units. In
these scenarios, the arm extends up and outward.
Figure 8: Bucket speed as a result of just actuator
1(top) or both actuator 1 and 2(bottom) driving at
0.1 m/s

Similarly, acceleration potential also doubles with
the use of both actuators, shown in figure 9.
Figure 9: Bucket acceleration as a result of just
actuator 1(top) or both actuator 1 and 2(bottom)
driving at 0.1 m/s
2.7. Dynamic Results
A simple virtual work analysis was done to both
visualize power consumption of the machine, and
to validate results. In each scenario, all actuators
are moving at +/- 0.1 m/s. Figure 10 shows power
consumption of the machine over time with a full
bucket load, lowering downwards.
Figure 10: Power required to drive the arm
downwards over time – Full load in bucket
Figure 11 shows the same condition, but with the
arm moving up and out. Power consumption is
noticeably lower and more linear.
Figure 11: Power required to drive the arm up and
out over time – Full load in bucket
Figure 12 shows the consumption of the arm
moving up and out – without any mass in the
excavator bucket. The power consumption

variance is significantly lower than the scenario
with the load in the bucket.
Figure 12: Power required to drive the arm up and
out over time – No load in bucket
Each of these scenarios further validate the model.
The Link-Belt excavator used as reference has a
444 HP engine, well within the normal range of
power consumption seen in this section.
2.8. Model Limitations
The major limitation to this model is Grashof’s
criterion – or the condition in which the sum of the
shortest and longest link must remain smaller than
the sum of the remaining links in a 4 bar
mechanism. Each of the pairs of two hydraulic
links attached at the arms creates a 4 bar
mechanism, making 3 total in the entire
machine[3]. When a piston extends or retracts too
far, all links become parallel. When the piston
tries to retract further, the model fails and the
determinate of the Jacobian goes to zero. Using
the “arm up and out” movement, figure 13 shows
the Jacobian over time.
Figure 13: Jacobian over time as the arm moves up
and out
As discussed in section 2.6, with the bucket
extending the fastest, it is the most likely one to
set the determinate of the Jacobian to zero first.
3. Conclusion
A working model of an excavator arm was
successfully made and demonstrated to run in
Matlab. This could have useful applications in
determining power requirements or simulating
excavator behavior in early stages of design.
Further work on this model could include forward
dynamic analysis that would allow application of
driving forces on the prismatic joints, to better
simulate realistic hydraulic actuation.
References
[1] Link-Belt 800 LX
https://www.lbxco.com/Specs/800LX.pdf
[2] Sommer.: Notes_01_01.
[3] Sommer.: Notes_04_01

% MAIN CODE
clc, clear, close all
% initialize
t=0;
tfin = 20;
proj_mass;
proj_phi;
keep = [];
keep_q = [];
keep_W = [];
assy_tol = .000001;
for t = 0 : .01 : tfin,
proj_phi;
while max(abs(PHI)) > assy_tol,
proj_phi;
q = q - inv(JAC) * PHI;
keep = [PHI';keep];
PHI;
end
t
proj_kin;
VW = -qd'*(QA-M*qdd);
keep_q = [keep_q;q'];
keep_W = [keep_W;(W1+W2+W3) t abs(VW) q(7) q(8) phi3dd sqrt(r4d'*r4d) det(JAC)];
end
%%
figure
plot(abs(dx11)*keep_W(:,2),keep_W(:,7))
xlabel('Hyd Actuator 1&2 displacement-each [m]')
ylabel('Bucket Speed [m/s]')
figure
plot(abs(dx22)*keep_W(:,2),keep_q(:,6)/pi*180 - keep_q(:,3)/pi*180)
xlabel('Hyd Actuator 2 displacement [m]')
ylabel('ang3 [deg]')
figure
plot(abs(dx33)*keep_W(:,2),keep_q(:,9)/pi*180 - keep_q(:,6)/pi*180 - keep_q(:,3)/pi*180)
xlabel('Hyd Actuator 3 displacement [m]')
ylabel('ang4 [deg]')
figure
plot(keep_W(:,2),(keep_W(:,3)*.0013412))
xlabel('Time [s]')
ylabel('Power [hp]')
figure
plot(keep_W(:,4),((keep_W(:,3))*.0013412))
xlabel('Bucket "horizontal" distance from origin [m]')
ylabel('Power [hp]')
figure
plot(keep_W(:,5),((keep_W(:,3))*.0013412))
xlabel('Bucket "vertical" distance from origin [m]')
ylabel('Power [hp]')
figure
plot(keep_W(:,2),keep_W(:,8))
xlabel('Time [s]')
ylabel('Det(Jac)')

%Mass or INI File
t=0;
load arm1.txt
load arm2.txt
load arm3.txt
load arm4.txt
load arm5.txt
load arm6.txt
load arm7.txt
load arm8.txt
load arm9.txt
load arm10.txt
load arm11.txt
load allglobals1.txt
load hyd1.txt
load hyd2.txt
load hyd3.txt
%Calibrate
Length = length(arm1)
pixels = sqrt((arm1(Length,1)-arm1(Length-4,1))^2 + (arm1(Length,2)-arm1(Length-4,2))^2)
%actual length = 8.73 meters
ratio = 8.73/pixels %m/pixel
%new dimensions
allglobals = allglobals1*ratio;
%scaling and moving to A as the origin
arm1 = arm1*ratio - allglobals(1,:);
arm2 = arm2*ratio- allglobals(1,:);;
arm3 = arm3*ratio- allglobals(1,:);;
arm4 = arm4*ratio- allglobals(1,:);;
arm5 = arm5*ratio- allglobals(1,:);;
arm6 = arm6*ratio- allglobals(1,:);;
arm7 = arm7*ratio- allglobals(1,:);;
arm8 = arm8*ratio- allglobals(1,:);;
arm9 = arm9*ratio- allglobals(1,:);;
arm10 = arm10*ratio- allglobals(1,:);
arm11 = arm11*ratio- allglobals(1,:);
hyd1 = hyd1*ratio-allglobals(1,:);
hyd2 = hyd2*ratio-allglobals(1,:);
hyd3 = hyd3*ratio-allglobals(1,:);
allglobals = allglobals-allglobals(1,:);
%flip
arm1(:,1) = arm1(:,1)*-1;
arm2(:,1) = arm2(:,1)*-1;
arm3(:,1) = arm3(:,1)*-1;
arm4(:,1) = arm4(:,1)*-1;
arm5(:,1) = arm5(:,1)*-1;
arm6(:,1) = arm6(:,1)*-1;
arm7(:,1) = arm7(:,1)*-1;
arm8(:,1) = arm8(:,1)*-1;
arm9(:,1) = arm9(:,1)*-1;
arm10(:,1) = arm10(:,1)*-1;
arm11(:,1) = arm11(:,1)*-1;
hyd1(:,1) = hyd1(:,1)*-1;
hyd2(:,1) = hyd2(:,1)*-1;
hyd3(:,1) = hyd3(:,1)*-1;
allglobals(:,1) = allglobals(:,1)*-1
plot(arm1(:,1),arm1(:,2),arm2(:,1),arm2(:,2),arm3(:,1),arm3(:,2),arm4(:,1),arm4(:,2),arm5(:,1),arm5(:,2),hyd1(:,1),hyd1(:,2),hyd2
(:,1),hyd2(:,2),hyd3(:,1),hyd3(:,2))
%Mass and CG
thick = .05;
hyd1m = 800;
hyd2m = 800;
hyd3m = 800;
m2 = 8040;
m3 = 3920;
m4 = 10000;
m5 = 100;
m6 = 100;
m7 = hyd1m/2;
m8 = hyd1m/2;
m9 = hyd2m/2;
m10 = hyd2m/2;
m11 = hyd3m/2;
m12 = hyd3m/2;
[arm1g arm1i arm1c] = polygeom((arm1(1:(length(arm1)-4),1)),(arm1(1:(length(arm1)-4),2)));
[arm2g arm2i arm2c] = polygeom((arm2(1:(length(arm2)-5),1)),(arm2(1:(length(arm2)-5),2)));
[arm3g arm3i arm3c] = polygeom((arm3(1:(length(arm3)-2),1)),(arm3(1:(length(arm3)-2),2)));
[arm4g arm4i arm4c] = polygeom((arm4(1:(length(arm4)-2),1)),(arm4(1:(length(arm4)-2),2)));
[arm5g arm5i arm5c] = polygeom((arm5(1:(length(arm5)-2),1)),(arm5(1:(length(arm5)-2),2)));
[arm6g arm6i arm6c] = polygeom(arm6(:,1),arm6(:,2));
[arm7g arm7i arm7c] = polygeom(arm7(:,1),arm7(:,2));
[arm8g arm8i arm8c] = polygeom(arm8(:,1),arm8(:,2));
[arm9g arm9i arm9c] = polygeom(arm9(:,1),arm9(:,2));
[arm10g arm10i arm10c] = polygeom(arm10(:,1),arm10(:,2));
[arm11g arm11i arm11c] = polygeom(arm11(:,1),arm11(:,2));
J2 = arm1c(5)/arm1g(1);
J3 = arm2c(5)/arm2g(1);
J4 = arm3c(5)/arm3g(1);
J5 = arm4c(5)/arm4g(1);
J6 = arm5c(5)/arm5g(1);
J7 = arm6c(5)/arm6g(1);
J8 = arm7c(5)/arm7g(1);
J9 = arm8c(5)/arm8g(1);
J10 = arm9c(5)/arm9g(1);
J11 = arm10c(5)/arm10g(1);
J12 = arm11c(5)/arm11g(1);
figure
plot((arm1(1:(length(arm1)-4),1)),(arm1(1:(length(arm1)-4),2)),(arm2(1:(length(arm2)-5),1)),(arm2(1:(length(arm2)-
5),2)),(arm3(1:(length(arm3)-2),1)),(arm3(1:(length(arm3)-2),2)),(arm4(1:(length(arm4)-2),1)),(arm4(1:(length(arm4)-
2),2)),(arm5(1:(length(arm5)-2),1)),(arm5(1:(length(arm5)-
2),2)),arm6(:,1),arm6(:,2),arm7(:,1),arm7(:,2),arm8(:,1),arm8(:,2),arm9(:,1),arm9(:,2),arm10(:,1),arm10(:,2),arm11(:,1),arm11(:,2
))
hold on
%legend('1','2','3','4','5','6','7','8','9','10','11')
hold on
%Global Locations
r1A = allglobals(1,:)'
r1B = allglobals(2,:)'
r1C = allglobals(3,:)'
r1D = allglobals(4,:)'
r1E = allglobals(5,:)'
r1F = allglobals(6,:)'
r1G = allglobals(7,:)'
r1H = allglobals(8,:)'
r1I = allglobals(9,:)'
r1J = allglobals(10,:)'
r1K = allglobals(11,:)'
r1L1 = allglobals(12,:)'
r1L2 = allglobals(13,:)'
r1M2 = allglobals(14,:)'
r1M1 = allglobals(15,:)'
r1N1 = allglobals(16,:)'
r1N2 = allglobals(17,:)'
r2cg = arm1g(2:3)'
r3cg = arm2g(2:3)'
r4cg = arm3g(2:3)'
r5cg = arm4g(2:3)'
r6cg = arm5g(2:3)'
r7cg = arm6g(2:3)'
r8cg = arm7g(2:3)'
r9cg = arm8g(2:3)'
r10cg = arm9g(2:3)'
r11cg = arm10g(2:3)'
r12cg = arm11g(2:3)'
%plot(r2cg(1),r2cg(2),'*',r3cg(1),r3cg(2),'*',r4cg(1),r4cg(2),'*',r5cg(1),r5cg(2),'*',r6cg(1),r6cg(2),'*',r7cg(1),r7cg(2),'*',r8c
g(1),r8cg(2),'*',r9cg(1),r9cg(2),'*',r10cg(1),r10cg(2),'*',r11cg(1),r11cg(2),'*',r12cg(1),r12cg(2),'*')
%
s1pA = [0 0]';
s2pA = [r1A-r2cg]
s2pB = [r1B-r2cg]
s2pC = [r1C-r2cg]
s2pD = [r1D-r2cg]
s3pD = [r1D-r3cg]
s3pE = [r1E-r3cg]
s3pF = [r1F-r3cg]
s3pG = [r1G-r3cg]
s3pH = [r1H-r3cg]
s4pE = [r1E-r4cg]
s4pJ = [r1J-r4cg]
s5pF = [r1F-r5cg]
s5pI = [r1I-r5cg]
s6pI = [r1I-r6cg]
s6pJ = [r1J-r6cg]
s7pK = [r1K-r7cg]
s7pL1 = [r1L1-r7cg]
s8pL2 = [r1L2-r8cg]

s8pB = [r1B-r8cg]
s9pM2 = [r1M2-r9cg]
s9pC = [r1C-r9cg]
s10pM1 = [r1M1-r10cg]
s10pH = [r1H-r10cg]
s11pG = [r1G-r11cg]
s11pN1 = [r1N1-r11cg]
s12pN2 = [r1N2-r12cg]
s12pI = [r1I-r12cg]
%
phi2 = 0;
phi3 = 0;
phi4 = 0;
phi5 =0;
phi6 = 0;
phi7 = 0;
phi8 = 0;
phi9 = 0;
phi10 = 0;
phi11 = 0;
phi12 = 0;
q(1,1) = r2cg(1);
q(2,1) = r2cg(2);
q(3,1) = phi2;
q(4,1) = r3cg(1);
q(5,1) = r3cg(2);
q(6,1) = phi3;
q(7,1) = r4cg(1);
q(8,1) = r4cg(2);
q(9,1) = phi4;
q(10,1) = r5cg(1);
q(11,1) = r5cg(2);
q(12,1) = phi5;
q(13,1) = r6cg(1);
q(14,1) = r6cg(2);
q(15,1) = phi6;
q(16,1) = r7cg(1);
q(17,1) = r7cg(2);
q(18,1) = phi7;
q(19,1) = r8cg(1);
q(20,1) = r8cg(2);
q(21,1) = phi8;
q(22,1) = r9cg(1);
q(23,1) = r9cg(2);
q(24,1) = phi9;
q(25,1) = r10cg(1);
q(26,1) = r10cg(2);
q(27,1) = phi10;
q(28,1) = r11cg(1);
q(29,1) = r11cg(2);
q(30,1) = phi11;
q(31,1) = r12cg(1);
q(32,1) = r12cg(2);
q(33,1) = phi12;
phi2i=phi2;
phi3i=phi3;
phi4i=phi4;
%plot(allglobals(:,1),allglobals(:,2),'*')
%legend('A','B','C','D','E','F','G','H','I','J','K','L1','L2','M2','M1','N1','N2')
%Gravity
M = diag( [ m2 m2 J2*m2 m3 m3 J3*m3 m4 m4 J4*m4 m5 m5 J5*m5 m6 m6 J6*m6 m7 m7 J7*m7 m8 m8 J8*m8 m9 m9 J9*m9 m10 m10 J10*m10 m11
m11 J11*m11 m12 m12 J12*m12]);
Q2 = [0 -9.81*m2 0]';
Q3 = [0 -9.81*m3 0]';
Q4 = [0 -9.81*m4 0]';
Q5 = [0 -9.81*m5 0]';
Q6 = [0 -9.81*m6 0]';
Q7 = [0 -9.81*m7 0]';
Q8 = [0 -9.81*m8 0]';
Q9 = [0 -9.81*m9 0]';
Q10 = [0 -9.81*m10 0]';
Q11 = [0 -9.81*m11 0]';
Q12 = [0 -9.81*m12 0]';
QA = [Q2;Q3;Q4;Q5;Q6;Q7;Q8;Q9;Q10;Q11;Q12];

% PHI file
dx11 = .1;
dx22 = -.1;
dx33= .1;
%dx11 = .1;
%dx22 = -.1;
%dx33= .1;
dx1 = 1.9887 +dx11*t;
dx2 = 2.8657 +dx22*t;
dx3 = -1.9858 +dx33*t;
d2r = pi / 180;
R = [ 0 -1 ; 1 0 ];
r2 = q(1:2);
r3 = q(4:5);
r4 = q(7:8);
r5 = q(10:11);
r6 = q(13:14);
r7 = q(16:17);
r8 = q(19:20);
r9 = q(22:23);
r10 = q(25:26);
r11 = q(28:29);
r12 = q(31:32);
phi2 = q(3);
phi3 = q(6);
phi4 = q(9);
phi5 = q(12);
phi6 = q(15);
phi7 = q(18);
phi8 = q(21);
phi9 = q(24);
phi10 = q(27);
phi11 = q(30);
phi12 = q(33);
A2 = [ cos(phi2) -sin(phi2); sin(phi2) cos(phi2) ];
A3 = [ cos(phi3) -sin(phi3); sin(phi3) cos(phi3) ];
A4 = [ cos(phi4) -sin(phi4); sin(phi4) cos(phi4) ];
A5 = [ cos(phi5) -sin(phi5); sin(phi5) cos(phi5) ];
A6 = [ cos(phi6) -sin(phi6); sin(phi6) cos(phi6) ];
A7 = [ cos(phi7) -sin(phi7); sin(phi7) cos(phi7) ];
A8 = [ cos(phi8) -sin(phi8); sin(phi8) cos(phi8) ];
A9 = [ cos(phi9) -sin(phi9); sin(phi9) cos(phi9) ];
A10 = [ cos(phi10) -sin(phi10); sin(phi10) cos(phi10) ];
A11 = [ cos(phi11) -sin(phi11); sin(phi11) cos(phi11) ];
A12 = [ cos(phi12) -sin(phi12); sin(phi12) cos(phi12) ];
B2 = R * A2;
B3 = R * A3;
B4 = R * A4;
B5 = R * A5;
B6 = R * A6;
B7 = R * A7;
B8 = R * A8;
B9 = R * A9;
B10 = R * A10;
B11 = R * A11;
B12 = R * A12;
% global locations - Eq 2.4.8, page 33
r1A = [0;0];
r2A = r2 + A2*s2pA;
r2B = r2 + A2*s2pB;
r2C = r2 + A2*s2pC;
r2D = r2 + A2*s2pD;
r3D = r3 + A3*s3pD;
r3E = r3 + A3*s3pE;
r3F = r3 + A3*s3pF;
r3G = r3 + A3*s3pG;
r3H = r3 + A3*s3pH;
r4E = r4 + A4*s4pE;
r4J = r4 + A4*s4pJ;
r5F = r5 + A5*s5pF;
r5I = r5 + A5*s5pI;

r6I = r6 + A6*s6pI;
r6J = r6 + A6*s6pJ;
r7K = r7 + A7*s7pK;
r7L1 = r7 + A7*s7pL1;
r8L2 = r8 + A8*s8pL2;
r8B = r8 + A8*s8pB;
r9M2 = r9 + A9*s9pM2;
r9C = r9 + A9*s9pC;
r10M1 = r10 + A10*s10pM1;
r10H = r10 + A10*s10pH;
r11G = r11 + A11*s11pG;
r11N1 = r11 + A11*s11pN1;
r12N2 = r12 + A12*s12pN2;
r12I = r12 + A12*s12pI;
% revolute constraints - A,B,C,D - Eq 3.3.10, page 65
PHI(1:2,1) = r1A - r2A;
PHI(3:4,1) = r2B - r8B;
PHI(5:6,1) = r2C - r9C;
PHI(7:8,1) = r2D - r3D;
PHI(9:10,1) = r3E - r4E;
PHI(11:12,1) = r3F - r5F;
PHI(13:14,1) = r3G - r11G;
PHI(15:16,1) = r3H - r10H;
PHI(17:18,1) = r5I - r6I;
PHI(19:20,1) = r5I - r12I;
PHI(21:22,1) = r4J - r6J;
PHI(23:24,1) = r1K - r7K;
PHI(25,1) = transpose(r7L1-r7K)*transpose(R)*(r8B-r8L2);
PHI(26,1) = transpose(r7L1-r7K)*transpose(R)*(r8L2-r7K);
PHI(27,1) = transpose(r9M2-r9C)*transpose(R)*(r10H-r10M1);
PHI(28,1) = transpose(r9M2-r9C)*transpose(R)*(r10M1-r9C);
PHI(29,1) = transpose(r11G-r11N1)*transpose(R)*(r12N2-r12I);
PHI(30,1) = transpose(r11G-r11N1)*transpose(R)*(r12I-r11N1);
PHI(31,1) = transpose(r7L1-r7K)*(r8L2-r7K)/(sqrt((r7L1-r7K)'*(r7L1-r7K)))-dx1;
PHI(32,1) = transpose(r9M2-r9C)*(r10M1-r9C)/(sqrt((r9M2-r9C)'*(r9M2-r9C)))-dx2;
PHI(33,1) = transpose(r11G-r11N1)*(r12I-r11N1)/(sqrt((r11G-r11N1)'*(r11G-r11N1)))-dx3;
% Jacobian by rows - Eq 3.3.12, page 66 for revolutes
JAC = zeros(33,33);
JAC(1:2,1:3) = [ -eye(2) -B2*s2pA ];
JAC(3:4,1:3) = [ eye(2) B2*s2pB ];
JAC(5:6,1:3) = [ eye(2) B2*s2pC ];
JAC(7:8,1:3) = [ eye(2) B2*s2pD ];
JAC(7:8,4:6) = [ -eye(2) -B3*s3pD ];
JAC(9:10,4:6) = [ eye(2) B3*s3pE ];
JAC(11:12,4:6) = [ eye(2) B3*s3pF ];
JAC(13:14,4:6) = [ eye(2) B3*s3pG ];
JAC(15:16,4:6) = [ eye(2) B3*s3pH ];
JAC(9:10,7:9) = [ -eye(2) -B4*s4pE ];
JAC(21:22,7:9) = [ eye(2) B4*s4pJ ];
JAC(11:12,10:12) = [ -eye(2) -B5*s5pF ];
JAC(17:18,10:12) = [ eye(2) B5*s5pI ];
JAC(19:20,10:12) = [ eye(2) B5*s5pI ];
JAC(17:18,13:15) = [ -eye(2) -B6*s6pI ];
JAC(21:22,13:15) = [ -eye(2) -B6*s6pJ ];
JAC(23:24,16:18) = [ -eye(2) -B7*s7pK ];
JAC(25,16:18) = [ 0 0 -transpose(r7L1-r7K)*(r8B-r8L2) ];
JAC(26,16:18) = transpose(r7L1-r7K)*transpose(R)*-[eye(2) B7*s7pL1] - [0 0 transpose(r7L1-r7K)*(r8L2-r7K)];
JAC(3:4,19:21) = [ -eye(2) -B8*s8pB ];
JAC(25,19:21) = [ 0 0 transpose(r7L1-r7K)*(r8B-r8L2) ];
JAC(26,19:21) = transpose(r7L1-r7K)*transpose(R)*[eye(2) B8*s8pL2];
JAC(5:6,22:24) = [ -eye(2) -B9*s9pC ];
JAC(27,22:24) = [ 0 0 -transpose(r9M2-r9C)*(r10H-r10M1)];
JAC(28,22:24) = transpose(r9M2-r9C)*transpose(R)*-[eye(2) B9*s9pM2] - [0 0 transpose(r9M2-r9C)*(r10M1-r9C)];
JAC(15:16,25:27) = [ -eye(2) -B10*s10pH ];
JAC(27,25:27) = [ 0 0 transpose(r9M2-r9C)*(r10H-r10M1) ];
JAC(28,25:27) = transpose(r9M2-r9C)*transpose(R)*[eye(2) B10*s10pM1] ;
JAC(13:14,28:30) = [ -eye(2) -B11*s11pG ];
JAC(29,28:30) = [ 0 0 -transpose(r11G-r11N1)*(r12N2-r12I)];
JAC(30,28:30) = transpose(r11G-r11N1)*transpose(R)*-[eye(2) B11*s11pN1] - [0 0 transpose(r11G-r11N1)*(r12I-r11N1)];
JAC(19:20,31:33) = [ -eye(2) -B12*s12pI ];

JAC(29,31:33) = [ 0 0 transpose(r11G-r11N1)*(r12N2-r12I) ];
JAC(30,31:33) = transpose(r11G-r11N1)*transpose(R)*[eye(2) B12*s12pN2] ;
JAC(31,16:18) = [ transpose(r7L1-r7K)*-[eye(2) B7*s7pL1] + [0 0 transpose(r7L1-r7K)*transpose(R)*(r8L2-r7K)]]/(sqrt((r7L1-
r7K)'*(r7L1-r7K)));
JAC(31,19:21) = (transpose(r7L1-r7K)*[eye(2) B8*s8pL2])/(sqrt((r7L1-r7K)'*(r7L1-r7K)));
JAC(32,22:24) = [ transpose(r9M2-r9C)*-[eye(2) B9*s9pM2] + [0 0 transpose(r9M2-r9C)*transpose(R)*(r10M1-r9C)]]/(sqrt((r9M2-
r9C)'*(r9M2-r9C)));
JAC(32,25:27) = (transpose(r9M2-r9C)*[eye(2) B10*s10pM1])/(sqrt((r9M2-r9C)'*(r9M2-r9C))) ;
JAC(33,28:30) = [ transpose(r11G-r11N1)*-[eye(2) B11*s11pN1] + [0 0 transpose(r11G-r11N1)*transpose(R)*(r12I-
r11N1)]]/(sqrt((r11G-r11N1)'*(r11G-r11N1)));
JAC(33,31:33) = (transpose(r11G-r11N1)*[eye(2) B12*s12pN2])/(sqrt((r11G-r11N1)'*(r11G-r11N1))) ;
% current results

% KIN File
% velocity
velrhs = zeros(33,1);
velrhs(31) = dx11;
velrhs(32) = dx22;
velrhs(33) = dx33;
qd = inv(JAC) * velrhs;
% global velocities of points
r2d = qd(1:2);
r3d = qd(4:5);
r4d = qd(7:8);
r5d = qd(10:11);
r6d = qd(13:14);
r7d = qd(16:17);
r8d = qd(19:20);
r9d = qd(22:23);
r10d = qd(25:26);
r11d = qd(28:29);
r12d = qd(31:32);
phi2d = qd(3);
phi3d = qd(6);
phi4d = qd(9);
phi5d = qd(12);
phi6d = qd(15);
phi7d = qd(18);
phi8d = qd(21);
phi9d = qd(24);
phi10d = qd(27);
phi11d = qd(30);
phi12d = qd(33);
% acceleration
accrhs = zeros(33,1);
accrhs(1:2) = -A2*s2pA*phi2d*phi2d;
accrhs(3:4) = A2*s2pB*phi2d*phi2d - A8*s8pB*phi8d*phi8d;
accrhs(5:6) = A2*s2pC*phi2d*phi2d - A9*s9pC*phi9d*phi9d;
accrhs(7:8) = A2*s2pD*phi2d*phi2d - A3*s3pD*phi3d*phi3d;
accrhs(9:10) = A3*s3pE*phi3d*phi3d - A4*s4pE*phi4d*phi4d;
accrhs(11:12) = A3*s3pF*phi3d*phi3d - A5*s5pF*phi5d*phi5d;
accrhs(13:14) = A3*s3pG*phi3d*phi3d - A11*s11pG*phi11d*phi11d;
accrhs(15:16) = A3*s3pH*phi3d*phi3d - A10*s10pH*phi10d*phi10d;
accrhs(17:18) = A5*s5pI*phi5d*phi5d - A6*s6pI*phi6d*phi6d;
accrhs(19:20) = A5*s5pI*phi5d*phi5d - A12*s12pI*phi12d*phi12d;
accrhs(21:22) = A4*s4pJ*phi4d*phi4d - A6*s6pJ*phi6d*phi6d;
accrhs(23:24) = - A7*s7pK*phi7d*phi7d;
accrhs(25) = 0;
accrhs(26) = transpose(r7L1-r7K)*(2*phi7d*phi7d*((r8d+phi8d*B8*s8pL2)-(r7d+phi7d*B7*s7pK))+transpose(R)*(phi7d*phi7d*(r8L2-
r7K)+(phi8d*phi8d*A8*s8pL2-phi7*phi7*A7*s7pK)));
accrhs(27) = 0;
accrhs(28) = transpose(r9M2-r9C)*(2*phi9d*phi9d*((r10d+phi10d*B10*s10pM1)-(r9d+phi9d*B9*s9pC))+transpose(R)*(phi9d*phi9d*(r10M1-
r9C)+(phi10d*phi10d*A10*s10pM1-phi9*phi9*A9*s9pC)));
accrhs(29) = 0;
accrhs(30) = transpose(r11G-r11N1)*(2*phi11d*phi11d*((r12d+phi12d*B12*s12pI)-
(r11d+phi11d*B11*s11pN1))+transpose(R)*(phi11d*phi11d*(r12I-r11N1)+(phi12d*phi12d*A12*s12pI-phi11*phi11*A11*s11pN1)));
accrhs(31)=transpose(r7L1-r7K)*(-2*phi7d*phi7d*transpose(R)*((r8d+phi8d*B8*s8pL2)-(r7d+phi7d*B7*s7pK))+phi7d*phi7d*(r8L2-
r7K)+(phi8d*phi8d*A8*s8pL2-phi7*phi7*A7*s7pK))/(sqrt((r7L1-r7K)'*(r7L1-r7K)));;
accrhs(32)=transpose(r9M2-r9C)*(-2*phi9d*phi9d*transpose(R)*((r10d+phi10d*B10*s10pM1)-(r9d+phi9d*B9*s9pC))+phi9d*phi9d*(r8L2-
r7K)+(phi10d*phi10d*A10*s10pM1-phi9*phi9*A9*s9pC))/(sqrt((r9M2-r9C)'*(r9M2-r9C)));;
accrhs(33)=transpose(r11G-r11N1)*(-2*phi11d*phi11d*transpose(R)*((r12d+phi12d*B12*s12pI)-
(r11d+phi11d*B11*s11pN1))+phi9d*phi9d*(r8L2-r7K)+(phi12d*phi12d*A12*s12pI-phi11*phi11*A11*s11pN1))/(sqrt((r11G-r11N1)'*(r11G-
r11N1)));;
qdd = inv(JAC) * accrhs;
% global accelerations
r2dd = qdd(1:2);
r3dd = qdd(4:5);
r4dd = qdd(7:8);
phi2dd = qdd(3);
phi3dd = qdd(6);
phi4dd = qdd(9);
%Force
lambda = inv(JAC') * ( QA - M*qdd );
%F1 = norm(r7L1-r7K)*norm(r8L2-r7K)*lambda(26);
%F2 = norm(r9M2-r9C)*norm(r10M1-r9C)*lambda(28);
%F3 = norm(r11G-r11N1)*norm(r12I-r11N1)*lambda(30);
%F1 = R*(r7L1-r7K)*lambda(26);
%F2 = R*(r9M2-r9C)*lambda(28);
%F3 = R*(r11G-r11N1)*lambda(30);
F1 = -lambda(3:4);
F2 = -lambda(15:16);
F3 = -lambda(19:20);
W1 = sqrt(F1'*F1)*(abs(dx11));
W2 = sqrt(F2'*F2)*(abs(dx22));
W3 = sqrt(F3'*F3)*(abs(dx33));

1
MANUFACTURING A SPHERICAL FOUR-BAR MECHANISM
Ritika Menghani and Ellen Zerbe
Pennsylvania State University, State College, PA
ABSTRACT Students are very familiar with the standard planar four bar
mechanism. A spherical four bar would assist in the transition to
three dimensions by starting with a familiar design. The
spherical four bar is also unique in that while it operates in three
dimension in an x-y-z coordinate frame, it only operates in two
dimensions when considering a spherical coordinate frame (ϕ
and θ). The links for the mechanism were manufactured using
3D printing because it was the simplest and least expensive
method for creating the geometry needed.
INTRODUCTION Spherical four-bar mechanisms are similar to the more
common planar four-bar mechanism in that they are created by
four links with four revolute joints connecting them. When the
axes of rotation for each revolute intersect at a single point, the
mechanism is considered a spherical four-bar. The links then
travel a path that lies on the surface of a sphere as the mechanism
moves. These linkages are often used to replace multiple joints
in instances where a more fluid motion is desired. The controlled
motion of a spherical four-bar can be better than any
unsteadiness that results from multiple joints. The folding
mechanism on small airplane wings is an example of this.
Some work has already been done on the design of spherical
four-bars using standard manufacturing methods [1] and
specialized design software [2]. We decided to use additive
manufacturing due to its ability to create complex geometry, its
cost effectiveness, and its speed of manufacturing.
MATERIALS AND METHODS Each piece of the spherical four-bar mechanism was
modelled in SolidWorks and then printed using PLA. The
designs were based off of an available spherical four-bar model
on YouMagine [3]. Modifications were made in the redesigned
pieces to better fit the intended joint system, ie: replacing snap
fits with through hole. All four links and base connector were
printed using the Mechanical Engineering department’s 3D
printing services. The final iteration of the base was printed with
a personal 3D printer where the layer thickness and infill density
could be more controlled. A picture of the final assembly is
shown in Figure 1.
FIGURE 1: Final assembly of the spherical four-bar mechanism.
RESULTS AND DISCUSSION 3D printing some of the parts required multiple iterations,
specially the base. Due to 3D printers generally undersizing
holes, the base connector would not fit into the base and hence
this required a little bit of redesign and reprinting. Figure 2 shows
the iterations of the base.
FIGURE 2: Three printings of the base part. The orange piece was
printed using the me department printing services and the piece on the
right was the final product.
Another challenge encountered in this project was the
stacking. Initially, standard machine bolts were selected as the
joints between links, however, the bolt head ended up interfering
with the motion of the links. This was resolved by using carriage
bolts which have a smaller head and allow full motion of all
links. Figure 3 demonstrates the stacking issue and result when
the bolts were switched.

2
FIGURE 3: The image on the left shows the stacking issue
encountered. The image on the right shows the solution with the
slimmer profile of the carriage bolts.
Three different link lengths were printed for link 4 (output
link) in order to observe the change in motion. The link in the
original design used a 37° angle for link 4 which is the same size
as link 2; link 1 and link 3 also have approximately the same
dimensions. This leads a rectangular formation of links, and
when link 2 is horizontal it is impossible to tell which direction
the mechanism is moving in if the velocity of link 2 is unknown.
To work around this, two additional options for link 4 were
printed, one traces 45° and the other traces 50°. When link 4 is
swapped out for either of these two, a more definite posture is
obtained and link 4 traces out an arc rather than completing a
rotation.
CONCLUSION The spherical four-bar was manufactured using 3D printing.
Three different options were printed for link 4 to compare motion
between case with equal lengths and case with link 4 greater than
link 2. Improvements to the design would involve reworking the
joint system. Shoulder screws could be used to create a
connection that is flush with the surface of the link. Spacers
could also be placed between links to increase the distance and
avoid collision with the heads of the bolts. The radii of the links
would need to be modified slightly for that design, since the
some links would now be farther from the center of the sphere.
Through this project, the authors learned about the limitations of
3D printing tolerances and the importance of stacking the links
of a mechanism appropriately.
REFERENCES [1] Turner, Michael L., Perkins, David A., Murray, Andrew
P., and Larochelle, Pierre M. “Systematic Process for
Constructing Spherical Four-Bar Mechanisms,” Proceeding of
IMECE2005. IMECE2005-80058. Orlando, Florida, November
5-11 2005.
[2] Ruth, D. Alan and McCarthy, J. Micheal, “The Design
of Spherical 4R Linkages for Four specified Orientations.”
Mechanism and Machine Theory Vol. 34 No. 5 (1999). DOI
10.1016/s0094-114x(98)00048-2.
[3]https://www.youmagine.com/designs/spherical-4-bar-
linkage-mechanism
1
ME 581 Simulation of Mechanical Systems Penn State University - Spring 2019
Instructor: Dr. H. Sommer
SPRING 2019
A DYNAMIC MODEL FOR THE DESIGN OF SCISSOR LIFT MECHANISMS
Jacob T. Nelson Penn State University
Mechanical Engineering University Park, PA, 16803
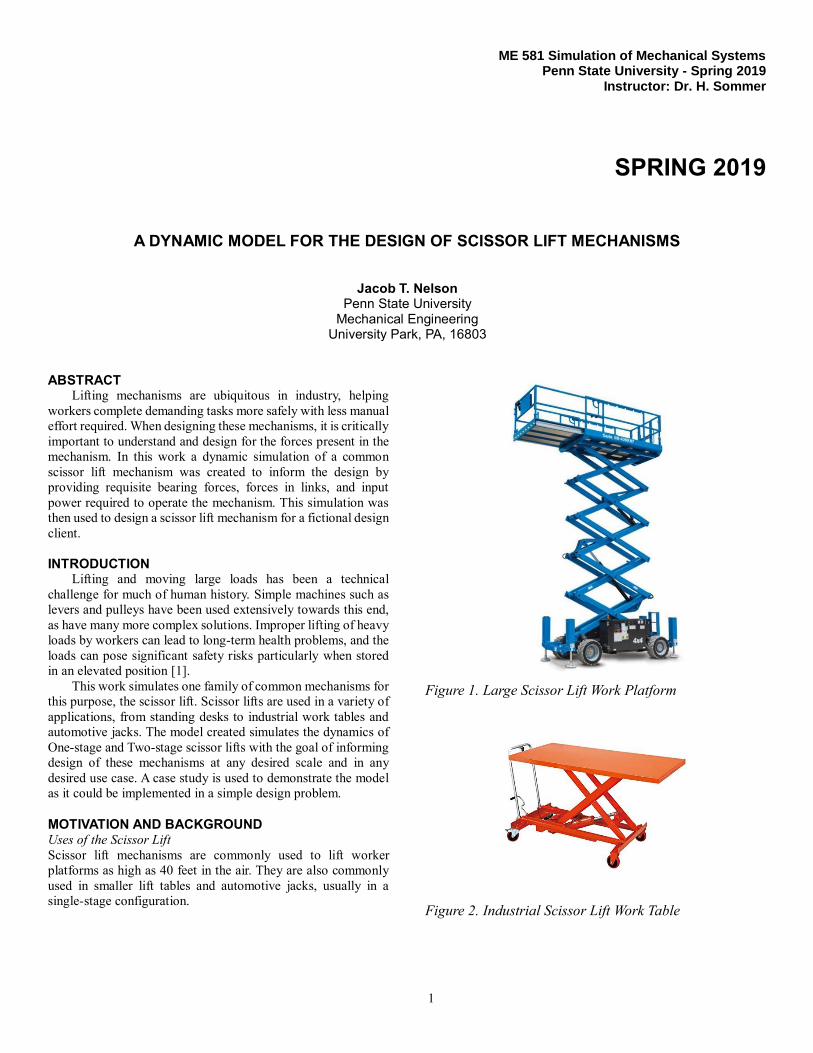
ABSTRACT Lifting mechanisms are ubiquitous in industry, helping
workers complete demanding tasks more safely with less manual
effort required. When designing these mechanisms, it is critically
important to understand and design for the forces present in the
mechanism. In this work a dynamic simulation of a common
scissor lift mechanism was created to inform the design by
providing requisite bearing forces, forces in links, and input
power required to operate the mechanism. This simulation was
then used to design a scissor lift mechanism for a fictional design
client.
INTRODUCTION Lifting and moving large loads has been a technical
challenge for much of human history. Simple machines such as
levers and pulleys have been used extensively towards this end,
as have many more complex solutions. Improper lifting of heavy
loads by workers can lead to long-term health problems, and the
loads can pose significant safety risks particularly when stored
in an elevated position [1].
This work simulates one family of common mechanisms for
this purpose, the scissor lift. Scissor lifts are used in a variety of
applications, from standing desks to industrial work tables and
automotive jacks. The model created simulates the dynamics of
One-stage and Two-stage scissor lifts with the goal of informing
design of these mechanisms at any desired scale and in any
desired use case. A case study is used to demonstrate the model
as it could be implemented in a simple design problem.
MOTIVATION AND BACKGROUND Uses of the Scissor Lift
Scissor lift mechanisms are commonly used to lift worker
platforms as high as 40 feet in the air. They are also commonly
used in smaller lift tables and automotive jacks, usually in a
single-stage configuration.
Figure 1. Large Scissor Lift Work Platform
Figure 2. Industrial Scissor Lift Work Table

2
Figure 3. Scissor Lift mechanism used in an Adjustable
Standing Desk
Additionally, several standing desk designs utilize a scissor
lift mechanism on a smaller scale, allowing a desk top and
attached hardware such as a computer to move vertically and
provide a stable work platform for office use.
Scissor Lift Mechanism Operation
The term “scissor lift” is traditionally used in reference to a
type of work platform, capable of changing its height using a
series of members joined at their center with a revolute to create
an X shape. [2]–[4] These members rotate relative to one another
to change the height of the mechanism. These X-shaped
members can then be stacked to give the mechanism the ability
to lift the platform higher. The basic mechanism is illustrated in
Figure 4. Each set of X-shaped members is referred to as a
“stage.” A scissor lift with only a single stage has two members
joined at their center, and to the platform above.
Figure 4. 1-stage Scissor Lift Mechanism
Scissor lift mechanisms can be modeled using a pin-in-slot
joint opposite a revolute joint on both the platform and the base,
which is represented in this model as ground. Both pin-in-slot
joints are located on the same side.
The mechanism has a single degree of freedom, capable of
moving in the vertical direction only. The one-stage case has four
links, three revolute joints, and two pin-in-slot joints.
𝑀 = 3(4 − 1) − 2(3) − 2 = 1 (1 𝑠𝑡𝑎𝑔𝑒)
𝑀 = 6(6 − 1) − 2(6) − 2 = 1 (2 𝑠𝑡𝑎𝑔𝑒)
These mechanisms can be driven in a variety of ways. One
simple way is to place a hydraulic or pneumatic actuator between
two joints on different links, changing the distance between the
two points. Motors can also be used to control the angle at the
ground revolute A, though this method is limited by the motor’s
holding torque which is responsible for keeping the load
elevated.
DESIGN PARAMETERS AND MODEL OUTPUTS To inform the design of these types of mechanisms, a
dynamic model was created. The inputs to this model are the
member link lengths (L2, L3, L4), the center of gravity position
of each link (default is centered in the link), and the loading
scenario of the table (a load in kg and the distance from center).
The model then outputs the forces in each link, the forces in the
bearings, and the motion of the various joints. The maximum
range of the mechanism is defined by Φ2, which operates
between 0 degrees and less than 90 degrees. At 90 degrees the
pin-in-slot joint E is located at the same planar position as joint
D. This represents an extreme case, as most scissor lifts operate
with Φ2 between 0 degrees and 60 degrees, as at 60 degrees joint
E is located at or near the center of the table, Link 4. This creates
stability concerns if the center of gravity is located at the center.
Table 1. List of design parameters for 1-stage mechanism
Sym. Parameter Units
L2 Link 2 Length m
L3 Link 3 Length m
L4 Link 4 Length m
CG Link Center of Gravity m
ω2 Rotational speed L2 Rad/s
Load Mass on platform kg
LP Load position from
center (+ right)
m
A link’s geometric and mass parameters can also be defined.
Each link has a width and a thickness, with the assumption that
each link is rectangular. The width represents the size of the face
of the link (that is, the side visible in Figure 6) while the
thickness represents the depth, the dimension into the page.

3
Because the mechanism is assumed to be symmetrical, the side
of the mechanism being analyzed is assumed to be carrying half
of the mass of the table, and thus the thickness of the table is
divided by two for the calculation.
Assumptions and Constraints
It is assumed that the mechanism is symmetrical, with an
identical support on the opposite side in three dimensions. The
model also assumes that links are perfectly rigid, so no
deformation is possible.
SINGLE-STAGE SCISSOR LIFT As described previously the scissor lift mechanism has one
degree of freedom, straight up and down in the y-direction. A
perfectly rigid mechanism should allow no table motion in the
global x-direction.
The joint and link definitions are shown in Figure 5. The single
stage scissor lift has three revolute joints at point A, C, and D.
Two pin-in-slot joints at B and E allow the mechanism to move
up and down. Link 1 is ground, Links 2 and 3 are the main
supports, and Link 4 is the table top.
Figure 5. Labeled 1-stage scissor lift as used in model
Figure 6 shows the parameters used to define each link. Local
coordinate frames are defined at the link center of gravity. The
center of gravity position can be defined at any point by
modifying the LiG value. The central pivot, joint C, is always
located at the center of the link, at half of Li.
Figure 6. Link Parameters and Local Coordinate Frames
Local body-fixed coordinates are defined using the parameters
Li and LiG, with these parameters defined from the left-most joint
(Joints A and D respectively). Calculations for link 2 are shown
for example:
{𝑠2}′𝐴 = { −𝐿2𝐺 , 0 }
{𝑠2}′𝐶 = {
𝐿22− 𝐿2𝐺 , 0 }
{𝑠2}′𝐸 = { 𝐿2 − 𝐿2𝐺 , 0 }
Global coordinate frames are also defined using these
parameters.
{𝑟2} = { 𝐿2𝐺 cos(𝜙2) , 𝐿2𝐺 sin(𝜙2) } {𝑟3} = { (𝐿3 − 𝐿3𝐺) cos(2𝜋 − 𝜙3) , (𝐿3 − 𝐿3𝐺) sin(2𝜋 − 𝜙3) } {𝑟4} = { 𝐿4𝐺 , 𝐿2 sin(𝜙2) }
There are 9 generalized coordinates for the single stage
mechanism.
{𝑞} =
{
𝑟2𝜙2𝑟3𝜙3𝑟4𝜙4}
The following equation shows the constraint vector for the single
stage case, with eight kinematic constraints and one driver
constraint:
{𝜙} =
{
{𝑟2}𝐴 − {𝑟1}
𝐴
{𝑎1}𝑇[𝑅]𝑇{𝑑13}
{𝑟2}𝐶 − {𝑟3}
𝐶
{𝑟4}𝐷 − {𝑟3}
𝐷
{𝑎4}𝑇[𝑅]𝑇{𝑑42}
𝜙2 −𝜙2𝑠𝑡𝑎𝑟𝑡 − 𝜔2𝑡}
𝑅𝑒𝑣𝐴𝑃𝑖𝑛𝑆𝑙𝑜𝑡𝐵𝑅𝑒𝑣𝐶𝑅𝑒𝑣𝐷
𝑃𝑖𝑛𝑆𝑙𝑜𝑡𝐸𝐷𝑟𝑖𝑣𝑒𝑟
For this simulation a relatively simple relative angle driver was
used at joint A, simulating a mechanism driven by an electric
4
motor. Other drivers simulating hydraulic actuators would be
possible, but were not implemented in this model.
With 9 generalized coordinates and 9 constraints, the
mechanism’s Jacobian is a 9x9 matrix.
[Φ]𝑟𝑒𝑣𝐴 = [ [𝐼2] [𝐵2]{𝑠2}′𝐴 ]
[Φ]𝑝𝑖𝑛𝑆𝑙𝑜𝑡𝐵 = [ {𝑎1}𝑇[𝑅]𝑇[𝐼2] {𝑎1}
𝑇[𝑅]𝑇[𝐵3]{𝑠3}′𝐵 ]
[Φ]𝑟𝑒𝑣𝐶,2 = [ [𝐼2] [𝐵2]{𝑠2}′𝐶 ]
[Φ]𝑟𝑒𝑣𝐶,3 = −[ [𝐼2] [𝐵3]{𝑠3}′𝐶 ]
[Φ]𝑟𝑒𝑣𝐷,4 = [ [𝐼2] [𝐵4]{𝑠4}′𝐷 ]
[Φ]𝑟𝑒𝑣𝐷,3 = −[ [𝐼2] [𝐵3]{𝑠3}′𝐷 ]
[Φ]𝑝𝑖𝑛𝑆𝑙𝑜𝑡𝐸,4 = [ {𝑎4}𝑇[𝑅]𝑇[ [𝐼2] [𝐵2]{𝑠2}
′𝐶 ]
− [01𝑥2 {𝑎4}𝑇{𝑑42} ] ]
[Φ]𝑝𝑖𝑛𝑆𝑙𝑜𝑡𝐸,2 = [ {𝑎4}𝑇[𝑅]𝑇[𝐼2] {𝑎4}
𝑇[𝑅]𝑇[𝐵2]{𝑠2}′𝐶 ]
[Φ]𝑑𝑟𝑖𝑣𝑒𝑟 = [ [01𝑥2] 1 [01𝑥2] 0 [01𝑥2] 0 ]
Where: {𝑎1} = {𝑟1}
𝐴 − {𝑟1}𝑃 {𝑑13} = {𝑟3}
𝐵 − {𝑟1}𝐴
And:
{𝑎4} = {𝑟4}𝐷 − {𝑟4}
𝐹 {𝑑42} = {𝑟2}𝐸 − {𝑟4}
𝐹
A Newton-Raphson algorithm was used to solve the Jacobian
and calculate the kinematic position solution. Velocity and
acceleration solutions were then computed using the following
equations.
Velocity Solutions
𝑣𝑘𝑖𝑛𝑒𝑚𝑎𝑡𝑖𝑐 = {01𝑥8} 𝑣𝑑𝑟𝑖𝑣𝑒𝑟 = 𝜔2
Acceleration Solutions
𝛾𝑟𝑒𝑣𝐴 = [𝐴2]{𝑠2}′𝐴𝜙2
2̇
𝛾𝑝𝑖𝑛𝑆𝑙𝑜𝑡𝐵 = {𝑎1}𝑇[𝑅]𝑇(−𝜙3
2̇ [𝐴3]{𝑠2}′𝐴)
𝛾𝑟𝑒𝑣𝐶 = [𝐴3]{𝑠3}′𝐶𝜙3
2̇ − [𝐴2]{𝑠2}′𝐶𝜙2
2̇
𝛾𝑟𝑒𝑣𝐷 = [𝐴4]{𝑠4}′𝐶𝜙4
2̇ − [𝐴3]{𝑠3}′𝐷𝜙3
2̇
𝛾𝑝𝑖𝑛𝑆𝑙𝑜𝑡𝐸 = {𝑎4}𝑇(2𝜙4̇{𝑑42} + 𝑅𝑇(𝜙4
2̇̇ {𝑑42} + 𝜙22̇ [𝐴2]{𝑠2}
′𝐸
−𝜙42[𝐴4]{𝑠4}
′𝐸)) 𝛾𝐷𝑟𝑖𝑣𝑒𝑟 = 0
Dynamic Solution
The mass of each link can be calculated as follows, assuming
each link is rectangular:
𝑚𝑖 = 𝐿𝑖𝑤𝑑𝑖𝑡ℎ𝑖𝜌
Where 𝜌 is the density of the material, in kg/m3. All lengths are
measured in meters.
Next, mass moment of inertia is calculated, again assuming all
links are rectangular.
𝐽𝑖 = (1
12)𝑚𝑖(𝐿𝑖
2 +𝑤𝑑𝑖2)
Mass matrices are assembled for each link, and then compiled
into the mass matrix for the full mechanism.
The applied forces are then entered.
𝑄𝑎𝑝𝑝 =
{
0𝑚2𝑔00𝑚3𝑔00
𝑚4𝑔 + 𝑙𝑜𝑎𝑑𝑙𝑜𝑎𝑑 ∗ 𝑙𝑜𝑎𝑑𝑃𝑜𝑠}
Where 𝑙𝑜𝑎𝑑 and 𝑙𝑜𝑎𝑑𝑃𝑜𝑠 define the size and location of the load
as a point force, in Newtons and meters respectively. Finally,
dynamics are calculated.
𝜆 = 𝑖𝑛𝑣([Φ]𝑇)({𝑄𝑎𝑝𝑝} − [𝑀]{�̈�})
𝑄𝑎𝑙𝑙 = [𝑄𝑎𝑝𝑝] + [𝑀]{�̈�}
This was developed and coded in MATLAB r2015b. The code is
included in Appendix A.
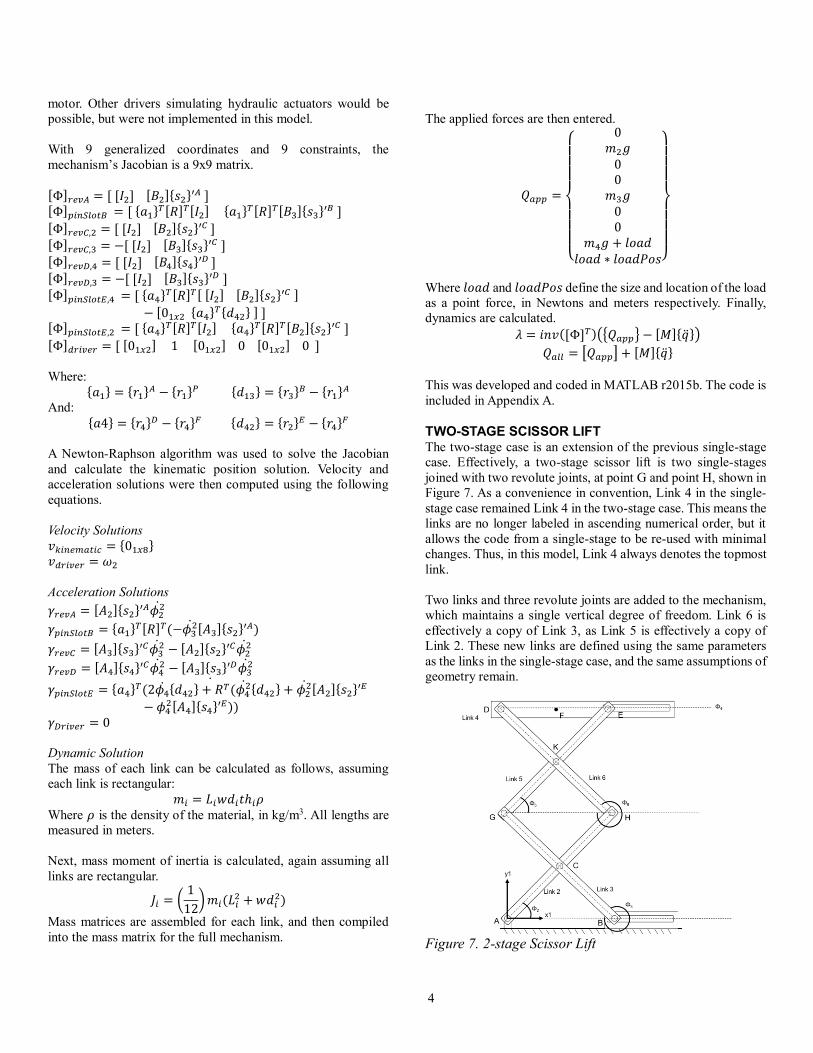
TWO-STAGE SCISSOR LIFT The two-stage case is an extension of the previous single-stage
case. Effectively, a two-stage scissor lift is two single-stages
joined with two revolute joints, at point G and point H, shown in
Figure 7. As a convenience in convention, Link 4 in the single-
stage case remained Link 4 in the two-stage case. This means the
links are no longer labeled in ascending numerical order, but it
allows the code from a single-stage to be re-used with minimal
changes. Thus, in this model, Link 4 always denotes the topmost
link.
Two links and three revolute joints are added to the mechanism,
which maintains a single vertical degree of freedom. Link 6 is
effectively a copy of Link 3, as Link 5 is effectively a copy of
Link 2. These new links are defined using the same parameters
as the links in the single-stage case, and the same assumptions of
geometry remain.
Figure 7. 2-stage Scissor Lift

5
After adding the new links, the mechanism now requires 15
generalized coordinates and 15 total constraints.
{𝑞} =
{
𝑟2𝜙2𝑟3𝜙3𝑟5𝜙5𝑟6𝜙6𝑟4𝜙4}
{𝜙} =
{
{𝑟2}𝐴 − {𝑟1}
𝐴
{𝑎1}𝑇[𝑅]𝑇{𝑑13}
{𝑟2}𝐶 − {𝑟3}
𝐶
{𝑟5}𝐺 − {𝑟3}
𝐺
{𝑟6}𝐻 − {𝑟2}
𝐻
{𝑟6}𝐾 − {𝑟5}
𝐾
{𝑟6}𝐷 − {𝑟4}
𝐷
{𝑎4}𝑇[𝑅]𝑇{𝑑45}
𝜙2 −𝜙2𝑠𝑡𝑎𝑟𝑡 − 𝜔2𝑡}
𝑅𝑒𝑣𝐴𝑃𝑖𝑛𝑆𝑙𝑜𝑡𝐵𝑅𝑒𝑣𝐶𝑅𝑒𝑣𝐺𝑅𝑒𝑣𝐻𝑅𝑒𝑣𝐾𝑅𝑒𝑣𝐷
𝑃𝑖𝑛𝑆𝑙𝑜𝑡𝐸𝐷𝑟𝑖𝑣𝑒𝑟
The new Jacobian should be 15 rows by 15 columns. The
Jacobian terms for the new mechanism are shown as below:
[Φ]𝑟𝑒𝑣𝐴 = [ [𝐼2] [𝐵2]{𝑠2}′𝐴 ]
[Φ]𝑝𝑖𝑛𝑆𝑙𝑜𝑡𝐵 = [ {𝑎1}𝑇[𝑅]𝑇[𝐼2] {𝑎1}
𝑇[𝑅]𝑇[𝐵3]{𝑠3}′𝐵 ]
[Φ]𝑟𝑒𝑣𝐶,2 = [ [𝐼2] [𝐵2]{𝑠2}′𝐶 ]
[Φ]𝑟𝑒𝑣𝐶,3 = −[ [𝐼2] [𝐵3]{𝑠3}′𝐶 ]
[Φ]𝑟𝑒𝑣𝐺,5 = [ [𝐼2] [𝐵5]{𝑠5}
′𝐺 ] [Φ]𝑟𝑒𝑣𝐺,3 = −[ [𝐼2] [𝐵3]{𝑠3}
′𝐺 ] [Φ]𝑟𝑒𝑣𝐻,6 = [ [𝐼2] [𝐵6]{𝑠6}
′𝐻 ] [Φ]𝑟𝑒𝑣𝐻,2 = −[ [𝐼2] [𝐵2]{𝑠2}
′𝐻 ] [Φ]𝑟𝑒𝑣𝐾,5 = [ [𝐼2] [𝐵5]{𝑠5}
′𝐾 ] [Φ]𝑟𝑒𝑣𝐾,6 = −[ [𝐼2] [𝐵6]{𝑠6}
′𝐾 ] [Φ]𝑟𝑒𝑣𝐷,6 = [ [𝐼2] [𝐵6]{𝑠6}
′𝐷 ] [Φ]𝑟𝑒𝑣𝐷,4 = −[ [𝐼2] [𝐵4]{𝑠4}
′𝐷 ] [Φ]𝑝𝑖𝑛𝑆𝑙𝑜𝑡𝐸,4 = [ {𝑎4}
𝑇[𝑅]𝑇[ [𝐼2] [𝐵5]{𝑠5}′𝐶 ]
− [01𝑥2 {𝑎4}𝑇{𝑑45} ] ]
[Φ]𝑝𝑖𝑛𝑆𝑙𝑜𝑡𝐸,5 = [ {𝑎4}𝑇[𝑅]𝑇[𝐼2] {𝑎4}
𝑇[𝑅]𝑇[𝐵5]{𝑠5}′𝐶 ]
[Φ15,3]𝑑𝑟𝑖𝑣𝑒𝑟 = 1
Where:
{𝑎1} = {𝑟1}𝐴 − {𝑟1}
𝑃 {𝑑13} = {𝑟3}𝐵 − {𝑟1}
𝐴
And: {𝑎4} = {𝑟4}
𝐷 − {𝑟4}𝐹 {𝑑45} = {𝑟5}
𝐸 − {𝑟4}𝐹
Again, a Newton-Raphson algorithm was used to determine the
position solution, and velocity and acceleration solutions were
then computed.
Velocity Solutions
𝑣𝑘𝑖𝑛𝑒𝑚𝑎𝑡𝑖𝑐 = {01𝑥14} 𝑣𝑑𝑟𝑖𝑣𝑒𝑟 = 𝜔2
Acceleration Solutions
𝛾𝑟𝑒𝑣𝐴 = [𝐴2]{𝑠2}′𝐴𝜙2
2̇
𝛾𝑝𝑖𝑛𝑆𝑙𝑜𝑡𝐵 = {𝑎1}𝑇[𝑅]𝑇(−𝜙3
2̇ [𝐴3]{𝑠2}′𝐴)
𝛾𝑟𝑒𝑣𝐶 = [𝐴3]{𝑠3}′𝐶𝜙3
2̇ − [𝐴2]{𝑠2}′𝐶𝜙2
2̇
𝛾𝑟𝑒𝑣𝐺 = [𝐴5]{𝑠5}′𝐺𝜙5
2̇ − [𝐴3]{𝑠3}′𝐺𝜙3
2̇
𝛾𝑟𝑒𝑣𝐻 = [𝐴6]{𝑠6}′𝐻𝜙6
2̇ − [𝐴2]{𝑠2}′𝐻𝜙2
2̇
𝛾𝑟𝑒𝑣𝐾 = [𝐴6]{𝑠6}′𝐾𝜙6
2̇ − [𝐴5]{𝑠5}′𝐾𝜙5
2̇
𝛾𝑟𝑒𝑣𝐷 = [𝐴4]{𝑠4}′𝐶𝜙4
2̇ − [𝐴6]{𝑠6}′𝐷𝜙6
2̇
𝛾𝑝𝑖𝑛𝑆𝑙𝑜𝑡𝐸 = {𝑎4}𝑇(2𝜙4̇{𝑑45} + 𝑅𝑇(𝜙4
2̇̇ {𝑑45} + 𝜙52̇ [𝐴5]{𝑠5}
′𝐸
−𝜙42[𝐴4]{𝑠4}
′𝐸)) 𝛾𝐷𝑟𝑖𝑣𝑒𝑟 = 0
Mass calculations are the same as for the single-stage case. The
new applied force vector contains two new terms.
𝑄𝑎𝑝𝑝 =
{
0𝑚2𝑔00𝑚3𝑔00𝑚5𝑔00𝑚6𝑔00
𝑚4𝑔 + 𝑙𝑜𝑎𝑑𝑙𝑜𝑎𝑑 ∗ 𝑙𝑜𝑎𝑑𝑃𝑜𝑠}
Dynamic calculations also remain the same as before.
𝜆 = 𝑖𝑛𝑣(𝐽𝐴𝐶𝑇)({𝑄𝑎𝑝𝑝} − [𝑀]{�̈�})
𝑄𝑎𝑙𝑙 = [𝑄𝑎𝑝𝑝] + [𝑀]{�̈�}
The full code for the 2-stage mechanism can be found in
Appendix B.
CASE STUDY: To test the model developed in its role as a design tool, a simple
design prompt was created. The prompt was:
A company wants to design a mobile lift
table to lift heavy equipment weighing up
to 1500 pounds. They need to lift these
loads from the floor to a maximum height
of 1.5 meters. They need to determine the
power required from an electric motor to
evaluate the feasibility of an electric
6
design, as well as the forces in all links
and bearings to use appropriate
hardware.
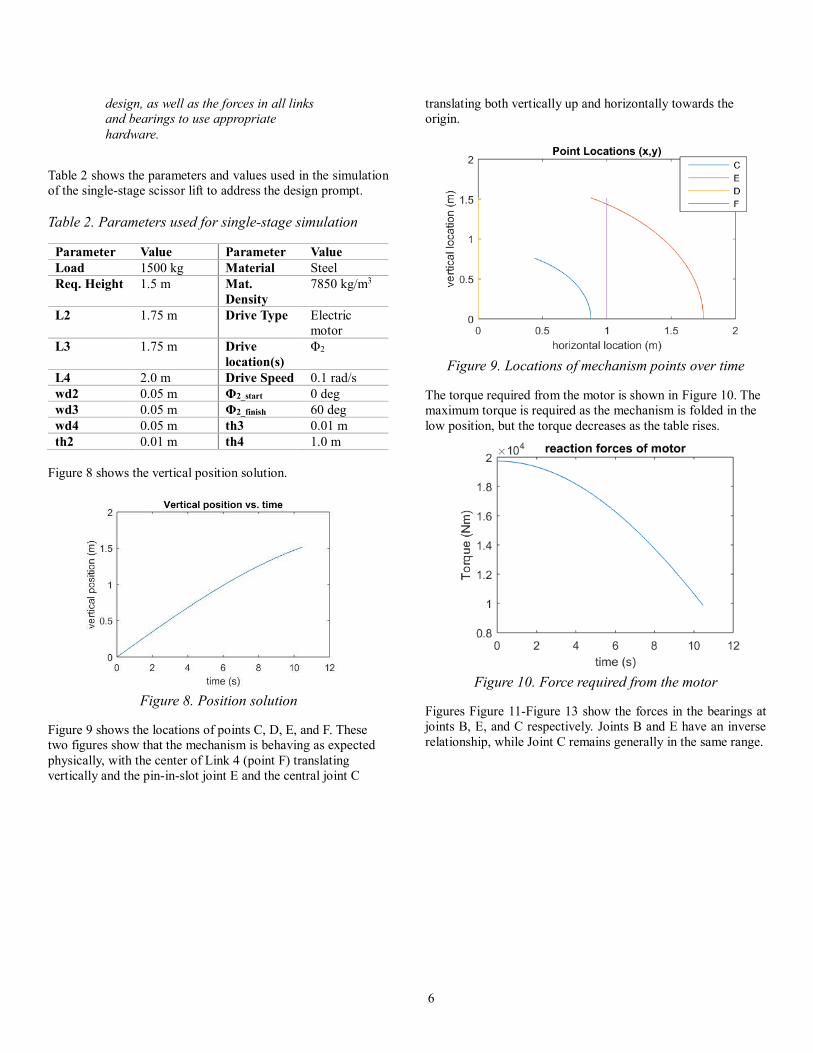
Table 2 shows the parameters and values used in the simulation
of the single-stage scissor lift to address the design prompt.
Table 2. Parameters used for single-stage simulation
Parameter Value Parameter Value
Load 1500 kg Material Steel
Req. Height 1.5 m Mat.
Density
7850 kg/m3
L2 1.75 m Drive Type Electric
motor
L3 1.75 m Drive
location(s)
Φ2
L4 2.0 m Drive Speed 0.1 rad/s
wd2 0.05 m Φ2_start 0 deg
wd3 0.05 m Φ2_finish 60 deg
wd4 0.05 m th3 0.01 m
th2 0.01 m th4 1.0 m
Figure 8 shows the vertical position solution.
Figure 8. Position solution
Figure 9 shows the locations of points C, D, E, and F. These
two figures show that the mechanism is behaving as expected
physically, with the center of Link 4 (point F) translating
vertically and the pin-in-slot joint E and the central joint C
translating both vertically up and horizontally towards the
origin.
Figure 9. Locations of mechanism points over time
The torque required from the motor is shown in Figure 10. The
maximum torque is required as the mechanism is folded in the
low position, but the torque decreases as the table rises.
Figure 10. Force required from the motor
Figures Figure 11-Figure 13 show the forces in the bearings at
joints B, E, and C respectively. Joints B and E have an inverse
relationship, while Joint C remains generally in the same range.

7
Figure 11. Reaction forces of the pin-in-slot joint B
Figure 12. Reaction forces of pin-in slot joint at E
Figure 13. Reaction forces at Joint C
Table 3. Table of forces in links and forces at each joint
Joint Max Force (N) Max Bearing
Force (N)
A, x 0.0601 10.36
A, y 67.43 18,067
B 0 3,362
C, x 0.0601 10.33
C, y 67.43 13,517
D, x 0.0608 10.30
D, y 10.30 6724.8
E 11,216 6892.8
Motor 1.2 19,732
Table 3 shows the maximum forces in links and bearing forces
at each joint in the mechanism. The key takeaway in this case is
the torque required from the motor, at 19.7 kNm. Using the
following equation, the power requirement can be calculated.
𝑃 =∑𝑇
𝑡= 314 𝑘𝑊
While it is not impossible to achieve these specifications with
electric motors, hydraulic actuators would likely provide a better
and potentially more economical solution for this use case.
Two-stage comparison
Using this model stage configurations can be compared to find if
one configuration is more efficient than another. For this case
study, a two-stage mechanism was compared with the single-
stage results.
The table, link 4, remains 2.0 m, but link 2, 3, 5, and 6 are
reduced in length to 1.0 m. All other parameters remain
unchanged from those in Table 2. The vertical position solution
is shown in Figure 14.
Figure 14. Vertical position vs. time for 2-stage case

8
The torque required from the motor is shown in Figure 15.
While following a similar profile to the single-stage case, more
torque is required at the initial stages of the lift.
Figure 15. Two-stage reaction forces at motor
Figure 16 and Figure 17 show the reaction forces at joint B and
joint C. Again, the reactions at joint B follow a similar trend as
the single-stage case, but the reactions at joint C change more
rapidly and more severely.
Figure 16. Two-stage reaction forces at joint B
Figure 17. Two-stage reaction forces at joint C
Table 4. Results from the two-stage case
Joint Max Force (N) Max Bearing
Force (N)
A, x 0.0196 12.55
A, y 38.52 28,249
B 0 8,443.8
C, x 0.0196 6.44 x 105
C, y 38.52 22,568
G, x 0.0118 6.44 x 105
G, y 0.0714 5641.5
H, x 38.59 6.44 x 105
H, y 0 7602.9
K, x 0.0714 6.44 x 105
K, y 38.59 3909.9
D, x 0.0118 12.39
D, y 12.39 5603
E 11,219 2514
Motor 0.771 22566
Power Requirement 354.2 kW
There is no appreciable benefit to using a two-stage
configuration over a single-stage configuration, as the two-stage
case requires more torque and more power using these
parameters. While the two—stage case could likely be optimized
further, the two still perform similarly.
Limitations
There are several ways to improve the case study and model
used. This work uses rough approximations of link parameters,
likely leading to an overestimation of mass in the system,
increasing power and torque requirements. This case study and
model used a simple rectangular shape for the links of the
mechanism, though it may be useful to incorporate other
common shapes for metal members, such as round or square
tube.

9
CONCLUSION AND FUTURE WORK This work presents a dynamic model of one-stage and two-
stage scissor lift mechanisms and utilizes the model in a
hypothetical design situation. Designs utilizing a one-stage and
two-stage configuration are compared, finding that in the design
case presented, a two-stage configuration has no appreciable
benefit over a single-stage design.
The model can easily be expanded to simulate n-stage
scissor lift mechanisms, giving more configuration options for a
designer. Another interesting simulation would use forward
dynamics to simulate the results of component failure, either of
the driver or a joint. This, coupled with extreme loading
scenarios, could allow for an assessment of risk should particular
components fail. Finally, more driver options could be
incorporated, particularly simulating hydraulic actuators
between two of the links, giving the ability to compare the results
using different drivers.
ACKNOWLEDGMENTS I would like to thank Dr. Sommer for his instruction this
semester and the Penn State Department of Mechanical
Engineering for creating these educational opportunities.
REFERENCES [1] OSHA, “Scissor Lifts,” OSHA Scaffolding eTool.
[Online]. Available:
https://www.osha.gov/SLTC/etools/scaffolding/scissorli
fts/index.html. [Accessed: 05-Feb-2019].
[2] D. Watkins, “Scissor lift mechanism,” 6679479B1, 20-
Jan-2004.
[3] R. Rowan, L. Sutherland, G. Cooke, and P. Pedersen,
“Scissor Lift,” 5722513, 1998.
[4] T. A. Craig, “Vehicle scissor lift,” US4899987A, 13-Feb-
1990.

10
APPENDIX A
1-STAGE MODEL CODE
sp_main % sp_main.m - Semester Project Scissor Lift - ref:
Haug, Fig P5.1, page 196
% main
% HJSIII - 06.03.09
% modified by Jacob Nelson for ME581 Semester Project
clear;
% initialize
sp_ini;
% For phi2 from 0 to pf degrees
pf = acos(s3pB(1)/L2); %Final angle phi 2
%Angle limited to point where Point E crosses COG of
link 4 at Point F
tpr = pf / w2; % time for one revolution
dt = tpr / 200; % 200 positions
full = 1; %Calculate or don't calculate full
revolution
sp_phi;
det(JAC)
% timer loop
keep = [];
force = [];
Lda = [];
if full == 1
for t=0:dt:tpr
% kinematics
sp_kin;
sp_dyn;
% save kinematics
angle2 = phi2 / d2r;
angle3 = phi3 / d2r;
angle4 = phi4 / d2r;
gamma = (phi3-phi4) / d2r;
detJAC = det(JAC);
xC = r3C(1);
yC = r3C(2);
xE = r2E(1);
yE = r2E(2);
xF = r4F(1);
yF = r4F(2);
xD = r3D(1);
yD = r3D(2);
yFd = r4d(2); %Vertical speed
keep = [ keep ; t angle2 angle3 angle4 r3C(1) r3C(2)
r2E(1) r2E(2) r4F(1) r4F(2) r3D(1) r3D(2), phi4d,
phi4dd];
force = [force; Qall];
Lda = [Lda; lambda.'];
% bottom of crank rotation loop
t = t+dt;
end
else %Run once
sp_kin;
sp_dyn;
% save kinematics
ang2 = phi2 / d2r;
ang3 = phi3 / d2r;
ang4 = phi4 / d2r;
gamma = (phi3-phi4) / d2r;
detJAC = det(JAC);
% bottom of crank rotation loop
end
t = keep(:,1);
ang2 = keep(:,2);
ang3 = keep(:,3);
ang4 = keep(:,4);
xC = keep(:,5);
yC = keep(:,6);
xE = keep(:,7);
yE = keep(:,8);
xF = keep(:,9);
yF = keep(:,10);
xD = keep(:,11);
yD = keep(:,12);
phi4d = keep(:,13);
phi4dd = keep(:,14);
Lda = -Lda;
%Plots for semester project
figure()
subplot(2,1,1);
plot(t,yF)%Vertical position with time
title('Vertical position vs. time')
xlabel('time (s)')
ylabel('vertical position (m)')
subplot(2,1,2);
plot(xC,yC,xE,yE,xD,yD,xF,yF);
title('Point Locations (x,y)')
xlabel('horizontal location (m)')
ylabel('vertical location (m)')
figure()
% Plot Reaction Forces
subplot(2,3,1);
plot(t,Lda(:,9))
title('reaction forces of motor')
xlabel('time (s)')
ylabel('Torque (Nm)')
subplot(2,3,2);
plot(t, Lda(:,1), t, Lda(:,2))
title('reaction forces at Joint A')
legend('x direction', 'y direction')
xlabel('time (s)')
ylabel('Force (N)')
subplot(2,3,3);
plot(t, Lda(:,3))
title('reaction forces at Joint B')
xlabel('time (s)')
ylabel('Force (N)')
subplot(2,3,4);
plot(t, Lda(:,4), t, Lda(:,5))
title('reaction forces at Joint C');

11
legend('x direction', 'y direction');
xlabel('time (s)')
ylabel('Force (N)')
subplot(2,3,5);
plot(t, Lda(:,6), t, Lda(:,7))
title('reaction forces at Joint D');
legend('x direction', 'y direction');
xlabel('time (s)')
ylabel('Force (N)')
subplot(2,3,6);
plot(t, Lda(:,8))
title('reaction forces at Joint E')
xlabel('time (s)')
ylabel('Force (N)')
%% Wrtie outputs
maxBearing = [max(abs(Lda(:,1)));
max(abs(Lda(:,2)));
max(abs(Lda(:,3)));
max(abs(Lda(:,4)));
max(abs(Lda(:,5)));
max(abs(Lda(:,6)));
max(abs(Lda(:,7)));
max(abs(Lda(:,8)));
max(abs(Lda(:,9)))];
maxForce = [max(abs(force(:,1)));
max(abs(force(:,2)));
max(abs(force(:,3)));
max(abs(force(:,4)));
max(abs(force(:,5)));
max(abs(force(:,6)));
max(abs(force(:,7)));
max(abs(force(:,8)));
max(abs(force(:,9)))];
maxLabels = ['Joint A, x';
'Joint A, y';
'Joint B ';
'Joint C, x';
'Joint C, y';
'Joint D, x';
'Joint D, y';
'Joint E ';
'Motor '];
table(maxLabels, maxForce, maxBearing)
%Calculate material cost
total_mass = (m2+m3+m4)*2; %Multiply by two for two
halves
total_cost = total_mass*mat_cost;
PW = (sum(Lda(:,9))/max(t))/1000
hp = PW*1000/746
sp_ini % sp_ini.m - Semester Project Scissor Lift
% initialize constants and assembly guesses
% HJSIII - 06.03.09
% modified by Jacob Nelson for ME581 semseter project
% general constants
d2r = pi / 180;
R = [ 0 -1; 1 0 ];
g = -9.81;
% mechanism constants
% length in m
L2 = 1.75; %Length link 2
L3 = L2; %Length link 3
L4 = 2.0; %Length link 4
wd2 = 0.05; %Width of link 2
wd3 = wd2;
wd4 = 0.05;
th2 = 0.01; %thickness in m
th3 = th2;
th4 = 1 / 2; %Half of the table width, assuming
symmetrical mechanism
%COG Locations
L2G = 0.5*L2; %assumes COG placed halfway along
mechanism
L3G = 0.5*L3;
L4G = 0.5*L4;
den = 7850; %density kg/m^3
mat_cost = 0.20; %Material cost in USD
m2 = L2*wd2*th2*den;
m3 = L3*wd3*th3*den;
m4 = L4*wd4*th4*den;
load = 1500 *-9.81 / 2; %Load in Kg *g
loadPos = 0.0 ; %Load position (from center of table,
negative = left, positive = right)
% initial guesses - angles measured by protractor
ang2 = 0;
ang3 = 360-ang2;
ang4 = 0;
phi2 = ang2*d2r;
phi3 = ang3*d2r;
phi4 = ang4*d2r;
%Constant local body-fixed locations of specific
points
s1pA =[ 0, 0 ].';
s1pB =[ L3*cos(2*pi - phi3), 0 ].';
s1pP =[ L4, 0].';
s2pA =[ -L2G, 0 ].';
s2pC =[ L2/2 - L2G, 0 ].';
s2pE =[ L2 - L2G, 0 ].';
s3pB =[ L3 - L3G, 0 ].';
s3pC =[ L3/2 - L3G, 0 ].';
s3pD =[ -L3G, 0 ].';
s4pD =[ -L4G, 0 ].';
s4pE =[ L2*cos(phi2)-L4G, 0 ].';
s4pF =[ L4/2 - L4G, 0 ].';
s4pQ =[ L4, 0].';
q(1,1) = L2G*cos(phi2);
q(2,1) = L2G*sin(phi2);
q(3,1) = phi2;
q(4,1) = (L3-L3G)*cos(2*pi - phi3);
q(5,1) = (L3-L3G)*sin(2*pi - phi3);
q(6,1) = phi3;
q(7,1) = L4G;
q(8,1) = L2*sin(phi2);
q(9,1) = phi4;
% driver - d
%d_start = s1pB(1); %Initial pos
%velo = 0.1; % crank speed
phi2_start = 0 *d2r;
w2 = 0.10 ; %0.5 rad/s
t = 0; % time
%Calculate moment of inertia
JG2 = (1/12)*m2*(L2^2+wd2^2);

12
JG3 = (1/12)*m3*(L3^2+wd3^2);
JG4 = (1/12)*m4*(L4^2+wd4^2);
%Assemble Mass Matricies
M2 = diag([m2 m2 JG2]);
M3 = diag([m3 m3 JG3]);
M4 = diag([m4 m4 JG4]);
M = [M2 zeros(3) zeros(3);
zeros(3) M3 zeros(3);
zeros(3) zeros(3) M4];
%Enter applied forces
Qapp = [
0; %F2x x force on link 2
m2*g; %F2y y force on 2
0; %T2 Torque on 2
0; %F3x
m3*g; %F3y
0; %T3
0; %F4x
m4*g + load; %F4y
load*loadPos]; %T4
sp_phi % sp_phi.m - Semseter project scissor lift
% evaluate constraints and Jacobian for crank driving
constraint
% HJSIII - 06.03.09
% modified by Jacob Nelson for ME581 semester project
% global location of local frames and rotation
matrices
% Eq 2.4.4, page 33 - Eq 2.6.5, page 42
r2 = q(1:2);
r3 = q(4:5);
r4 = q(7:8);
phi2 = q(3);
phi3 = q(6);
phi4 = q(9);
A2 = [ cos(phi2) -sin(phi2); sin(phi2) cos(phi2) ];
A3 = [ cos(phi3) -sin(phi3); sin(phi3) cos(phi3) ];
A4 = [ cos(phi4) -sin(phi4); sin(phi4) cos(phi4) ];
B2 = R * A2;
B3 = R * A3;
B4 = R * A4;
% global locations - Eq 2.4.8, page 33
r1A = [0,0]';
r1P = s1pP;
r2A = r2 + A2*s2pA;
r2C = r2 + A2*s2pC;
r2E = r2 + A2*s2pE;
r3B = r3 + A3*s3pB;
r3C = r3 + A3*s3pC;
r3D = r3 + A3*s3pD;
r4D = r4 + A4*s4pD;
r4F = r4 + A4*s4pF;
r4E = r4 + A4*s4pE;
r4Q = r4 + A4*s4pQ;
r1B = r3 + A3*s3pB;
% dij's
d13 = r3B - r1A;
a1 = r1A - r1P;
d42 = r2E - r4F;
a4 = r4D - r4F;
% Constraints
PHI(1:2,1) = r2A - r1A; %Revolute at A
PHI(3,1) = a1.'*R.'*d13; % Pin in slot at B
PHI(4:5,1) = r2C - r3C; %Revolute at C
PHI(6:7,1) = r4D - r3D; %Revolute at D
PHI(8,1) = a4.'*R.'*d42;% Pin in Slot at E
% crank driving constraint
PHI(9,1) = phi2 - phi2_start - w2*t;
% Jacobian by rows - Eq 3.3.12, page 66 for revolutes
JAC = zeros(9,9);
JAC(1:2,1:3) = [ eye(2) B2*s2pA ]; %Revolute at A
JAC(3,4:6) = [a1.'*R.'*[eye(2) B3*s3pB]]; %Pin in
slot B
JAC(4:5,1:3) = [ eye(2) B2*s2pC ]; %Revolute at C
JAC(4:5,4:6) = [ -eye(2) -B3*s3pC ];
JAC(6:7,7:9) = [ eye(2) B4*s4pD ]; %Revolute at D
JAC(6:7,4:6) = [ -eye(2) -B3*s3pD ];
JAC(8,7:9) = [a4.'*R.'*[-eye(2) -B4*s4pE] -
[zeros(1,2) a4.'*d42]]; %Pin in slot at E
JAC(8,1:3) = [a4.'*R.'*[eye(2) B2*s2pE]];
% driving constraint in Jacobian - Eq 3.1.9, page 52
JAC(9,3) = 1;
sp_kin % sp_kin.m - Kinematic solution for scissor lift
% positon, velocity, and acceleration at
desired_crank
% HJSIII - 06.03.09
% modified by Jacob Nelson for ME581 spemester
project
% Newton-Raphson position solution - Eq 3.6.7 and
3.6.8, page 100
assy_tol = 0.0001;
sp_phi;
n=1;
while max(abs(PHI)) > assy_tol,
q = q - inv(JAC)*PHI;
sp_phi;
n = n+1
end
% velocity - Eq 3.1.9, page 52 - also page 66 for
revolutes
velrhs(9,1) = w2;
qd = inv(JAC) * velrhs;
% global velocities - Eq 2.6.4, page 41
r2d = qd(1:2);
r3d = qd(4:5);
r4d = qd(7:8);
phi2d = qd(3);
phi3d = qd(6);
phi4d = qd(9);
%Point velocities
r3Bd = r3d + phi3d * B3 * s3pB;
r1Ad = 0;
r4Ed = r4d + phi4d * B4 * s4pE;
r2Ed = r2d + phi2d * B2 * s2pE;
d13d = r3Bd - r1Ad;
d42d = r4Ed - r2Ed;
% acceleration - Eq 3.1.10, page 53 - also page 66
for revolutes
accrhs(1:2,1) = A2*s2pA*phi2d*phi2d;
accrhs(3,1) = a1.'*(2*0*d13d + R.'*(0*d13 -
phi3d*phi3d*A3*s3pB));
accrhs(4:5,1) = A3*s3pC*phi3d*phi3d -
A2*s2pC*phi2d*phi2d;
accrhs(6:7,1) = A4*s4pD*phi4d*phi4d -
A3*s3pD*phi3d*phi3d;
accrhs(8,1) = a4.'*(2*phi4d*d42d +
R.'*(phi4d*phi4d*d42 + phi2d*phi2d*A2*s2pE -
phi4d*phi4d*A4*s4pE));
13
accrhs(9,1) = 0;
qdd = inv(JAC) * accrhs;
% global accelerations
r2dd = qdd(1:2);
r3dd = qdd(4:5);
r4dd = qdd(7:8);
phi2dd = qdd(3);
phi3dd = qdd(6);
phi4dd = qdd(9);
sp_dyn %sp_dyn
%Calculate dynamics of web cutter
lambda = (inv(transpose(JAC))*(Qapp-M*qdd));
Qall = (Qapp + M*qdd).';
APPENDIX B
2-STAGE MODEL CODE
sp2_main is same as sp_main
sp2_ini % sp2_ini.m - Semester Project
% Two stage Scissor Lift
% initialize constants and assembly guesses
% HJSIII - 06.03.09
% modified by Jacob Nelson for ME581 semseter project
% general constants
d2r = pi / 180;
R = [ 0 -1; 1 0 ];
g = -9.81;
% mechanism constants
% length in m
L2 = 1.0; %Length link 2
L3 = L2; %Length link 3
L4 = 2.0; %Length link 4
L5 = 1.0;
L6 = L5;
wd2 = 0.05; %Width of link 2
wd3 = wd2;
wd4 = 0.05;
wd5 = wd2;
wd6 = wd2;
th2 = 0.01; %thickness in m
th3 = th2;
th4 = 1 / 2; %Half of the table width, assuming
symmetrical mechanism
th5 = th2;
th6 = th5;
%COG Locations
L2G = 0.5*L2; %assumes COG placed halfway along
mechanism
L3G = 0.5*L3;
L5G = 0.5*L5;
L6G = 0.5*L6;
L4G = 0.5*L4;
den = 7850; %density g/cm^3
mat_cost = 0.20;%estimated material cost per KG, USD
m2 = L2*wd2*th2*den;
m3 = L3*wd3*th3*den;
m4 = L4*wd4*th4*den;
m5 = L5*wd5*th5*den;
m6 = L6*wd6*th6*den;
load = 1500 *-9.81 /2; %Load in Kg *g (half of load)
loadPos = 0 ; %Load position (from center of table,
negative = left, positive = right)
% initial guesses - angles measured by protractor
ang2 = 1;
ang3 = 360 - ang2;
ang5 = 1;
ang6 = 360 - ang5;
ang4 = 0;
phi2 = ang2*d2r;
phi3 = ang3*d2r;
phi4 = ang4*d2r;
phi5 = ang5*d2r;
phi6 = ang6*d2r;
%Constant local body-fixed locations of specific
points
s1pA =[ 0, 0 ].';
s1pB =[ L3*cos(2*pi - phi3), 0 ].';
s1pP =[ L4, 0].';
s2pA =[ -L2G, 0 ].';
s2pC =[ L2/2 - L2G, 0 ].';
s2pH =[ L2 - L2G, 0 ].';
s3pB =[ L3 - L3G, 0 ].';
s3pC =[ L3/2 - L3G, 0 ].';
s3pG =[ -L3G, 0 ].';
s5pG =[ -L5G, 0 ].';
s5pK =[ L5/2 - L5G, 0 ].';
s5pE =[ L5 - L5G, 0].';
s6pH =[ L6 - L6G, 0].';
s6pK =[ L6/2 - L6G, 0].';
s6pD =[ -L6G, 0].';
%Link 4
s4pD =[ -L4G, 0 ].';
s4pE =[ L2*cos(phi5)-L4G, 0 ].';
s4pF =[ L4/2 - L4G, 0 ].';
s4pQ =[ L4, 0].';
%Generalized Coordinates
q(1,1) = L2G*cos(phi2); %r2
q(2,1) = L2G*sin(phi2); %r2
q(3,1) = phi2;
q(4,1) = (L3-L3G)*cos(2*pi - phi3); %r3
q(5,1) = (L3-L3G)*sin(2*pi - phi3); %r3
q(6,1) = phi3;
q(7,1) = L5G*cos(phi5); %r5
q(8,1) = L3*sin(2*pi - phi3) + L5G*sin(phi5); %r5
q(9,1) = phi5;
q(10,1) =(L6-L6G)*cos(2*pi - phi6); %r6

14
q(11,1) = L2*sin(phi2) + (L6-L6G)*sin(2*pi - phi6);
%r6
q(12,1) = phi6;
q(13,1) = L4G; %r4x
q(14,1) = L2*sin(phi2) + L5*sin(phi5); %r4y
q(15,1) = phi4;
%driver - d
%d_start = s1pB(1); %Initial pos
%velo = 0.1; % crank speed
%d_start = L2;
phi2_start = 1 *d2r;
%dX = -0.25 ; %0.5 rad/s
w2 = 0.1; %rad/s
t = 0; % time
%Calculate moment of inertia
JG2 = (1/12)*m2*(L2^2+wd2^2);
JG3 = (1/12)*m3*(L3^2+wd3^2);
JG5 = (1/12)*m5*(L5^2+wd5^2);
JG6 = (1/12)*m6*(L6^2+wd6^2);
JG4 = (1/12)*m4*(L4^2+wd4^2);
%Assemble Mass Matricies
M2 = diag([m2 m2 JG2]);
M3 = diag([m3 m3 JG3]);
M5 = diag([m5 m5 JG5]);
M6 = diag([m6 m6 JG6]);
M4 = diag([m4 m4 JG4]);
M = [M2 zeros(3) zeros(3) zeros(3) zeros(3);
zeros(3) M3 zeros(3) zeros(3) zeros(3);
zeros(3) zeros(3) M5 zeros(3) zeros(3);
zeros(3) zeros(3) zeros(3) M6 zeros(3);
zeros(3) zeros(3) zeros(3) zeros(3) M4];
%Enter applied forces
Qapp = [
0; %F2x x force on link 2
m2*g; %F2y y force on 2
0; %T2 Torque on 2
0; %F3x
m3*g; %F3y
0; %T3
0; %F5x
m5*g; %F5y
0; %T5
0; %F6x
m6*g; %F6y
0; %T6
0; %F4x
m4*g + load; %F4y
load*loadPos]; %T4
sp2_phi
% sp_phi.m - Semseter project scissor lift
% evaluate constraints and Jacobian for crank
driving constraint
% HJSIII - 06.03.09
% modified by Jacob Nelson for ME581 semester
project
% global location of local frames and rotation
matrices
% Eq 2.4.4, page 33 - Eq 2.6.5, page 42
r2 = q(1:2);
r3 = q(4:5);
r5 = q(7:8);
r6 = q(10:11);
r4 = q(13:14);
phi2 = q(3);
phi3 = q(6);
phi5 = q(9);
phi6 = q(12);
phi4 = q(15);
A2 = [ cos(phi2) -sin(phi2); sin(phi2) cos(phi2) ];
A3 = [ cos(phi3) -sin(phi3); sin(phi3) cos(phi3) ];
A4 = [ cos(phi4) -sin(phi4); sin(phi4) cos(phi4) ];
A5 = [ cos(phi5) -sin(phi5); sin(phi5) cos(phi5) ];
A6 = [ cos(phi6) -sin(phi6); sin(phi6) cos(phi6) ];
B2 = R * A2;
B3 = R * A3;
B4 = R * A4;
B5 = R * A5;
B6 = R * A6;
% global locations - Eq 2.4.8, page 33
r1A = [0,0]';
r1P = s1pP;
r1B = r3 + A3*s3pB;
r2A = r2 + A2*s2pA;
r2C = r2 + A2*s2pC;
r2H = r2 + A2*s2pH;
r3B = r3 + A3*s3pB;
r3C = r3 + A3*s3pC;
r3G = r3 + A3*s3pG;
r5G = r5 + A5*s5pG;
r5K = r5 + A5*s5pK;
r5E = r5 + A5*s5pE;
r6H = r6 + A6*s6pH;
r6K = r6 + A6*s6pK;
r6D = r6 + A6*s6pD;
r4D = r4 + A4*s4pD;
r4F = r4 + A4*s4pF;
r4E = r4 + A4*s4pE;
r4Q = r4 + A4*s4pQ;
% dij's
d13 = r3B - r1A;
a1 = r1A - r1P;
d45 = r5E - r4D;
a4 = r4D - r4Q;
% Constraints
PHI(1:2,1) = r2A - r1A; %Revolute at A
PHI(3,1) = a1.'*R.'*d13; % Pin in slot at B
PHI(4:5,1) = r2C - r3C; %Revolute at C
PHI(6:7,1) = r5G - r3G; %Revolute at G
PHI(8:9,1) = r6H - r2H; %Revolute at H
PHI(10:11,1) = r5K - r6K; %Revolute at K
PHI(12:13,1) = r6D - r4D; %Revolute at D
PHI(14,1) = a4.'*R.'*d45;% Pin in Slot at E
% crank driving constraint
K = 2;
PHI(15,1) = q(3) - phi2_start - w2*t;
% Jacobian by rows - Eq 3.3.12, page 66 for
revolutes
JAC = zeros(15,15);
JAC(1:2,1:3) = [ eye(2) B2*s2pA ]; %Revolute at A
JAC(3,4:6) = [ a1.'*R.'*[eye(2) B3*s3pB] ]; %Pin
in slot B
JAC(4:5,1:3) = [ eye(2) B2*s2pC ]; %Revolute at C
JAC(4:5,4:6) = -[ eye(2) B3*s3pC ];
JAC(6:7,7:9) = [ eye(2) B5*s5pG ]; %Revolute at G
JAC(6:7,4:6) = -[ eye(2) B3*s3pG ];
JAC(8:9,10:12) = [ eye(2) B6*s6pH ]; %Revolute at H
JAC(8:9,1:3) = -[ eye(2) B2*s2pH ];

15
JAC(10:11,7:9) = [ eye(2) B5*s5pK ]; %Revolute at K
JAC(10:11,10:12) = -[ eye(2) B6*s6pK ];
JAC(12:13,10:12) = [ eye(2) B6*s6pD ]; %Revolute at
D
JAC(12:13,13:15) = -[ eye(2) B4*s4pD ];
JAC(14,13:15) = [a4.'*R.'*[-eye(2) -B4*s4pE] -
[zeros(1,2) a4.'*d45]]; %Pin in slot at E
JAC(14,7:9) = [a4.'*R.'*[eye(2) B5*s5pE]];
% driving constraint in Jacobian - Eq 3.1.9, page 52
%Relative angle driver between point G and H
JAC(15,3) = 1;
sp2_kin % sp_kin.m - Kinematic solution for scissor lift
% positon, velocity, and acceleration at
desired_crank
% HJSIII - 06.03.09
% modified by Jacob Nelson for ME581 spemester
project
% Newton-Raphson position solution - Eq 3.6.7 and
3.6.8, page 100
assy_tol = 0.0001;
sp2_phi;
n=1;
while max(abs(PHI)) > assy_tol,
q = q - inv(JAC)*PHI;
sp2_phi;
n = n+1
end
% velocity - Eq 3.1.9, page 52 - also page 66 for
revolutes
velrhs(15,1) = w2;
qd = inv(JAC) * velrhs;
% global velocities - Eq 2.6.4, page 41
r2d = qd(1:2);
r3d = qd(4:5);
r5d = qd(7:8);
r6d = qd(10:11);
r4d = qd(13:14);
phi2d = qd(3);
phi3d = qd(6);
phi5d = qd(9);
phi6d = qd(12);
phi4d = qd(15);
%Point velocities
r3Bd = r3d + phi3d * B3 * s3pB;
r1Ad = 0;
r5Ed = r5 + phi5d * B5 * s5pE;
r4Qd = r4d + phi4d * B4 * s4pQ;
d13d = r3Bd - r1Ad;
d45d = r5Ed - r4Qd;
% acceleration - Eq 3.1.10, page 53 - also page 66
for revolutes
accrhs(1:2,1) = A2*s2pA*phi2d*phi2d;
accrhs(3,1) = a1.'*(2*0*d13d + R.'*(0*d13 -
phi3d*phi3d*A3*s3pB));
accrhs(4:5,1) = A3*s3pC*phi3d*phi3d -
A2*s2pC*phi2d*phi2d;
accrhs(6:7,1) = A5*s5pG*phi5d*phi5d -
A3*s3pG*phi3d*phi3d;
accrhs(8:9,1) = A6*s6pH*phi6d*phi6d -
A2*s2pH*phi2d*phi2d;
accrhs(10:11,1) = A6*s6pK*phi6d*phi6d -
A5*s5pK*phi5d*phi5d;
accrhs(12:13,1) = A6*s6pD*phi6d*phi6d -
A4*s4pD*phi4d*phi4d;
accrhs(14,1) = a4.'*(2*phi4d*d45d +
R.'*(phi4d*phi4d*d45 + phi2d*phi2d*A2*s5pE -
phi4d*phi4d*A4*s4pE));
accrhs(15,1) = 0;
qdd = inv(JAC) * accrhs;
% global accelerations
r2dd = qdd(1:2);
r3dd = qdd(4:5);
r4dd = qdd(7:8);
phi2dd = qdd(3);
phi3dd = qdd(6);
phi4dd = qdd(9);
sp2_dyn is same as sp_dyn

ME 581: Simulation of Mechanical
Systems Canfield Joint Sizing Explored Through
Inverse Kinematics
Andrew Ring
Abstract
The Canfield Joint is a wrist-like mechanism
invented by Stephen Canfield in 1996. It can
provide a full hemisphere of rotational motion,
without any of the “gimbal lock” singularities that
can cause problems with traditionally gimballed
rotational mechanisms. Furthermore, the manner in
which the pointing occurs does not rotate the top
plate in its plane, meaning that hoses or wires can
be run through the joint without any concern of
twisting or requiring other devices such as slip rings
to maintain a connection. This makes the joint an
ideal candidate to be used on spacecraft for pointing
thrusters, solar panels, high gain antennas, or any
such device that requires precise directional
control. Effective usage demands that the joint be
sized optimally for a given application. The length
of various components will affect the joint’s range
of motion and physical extent of space necessary to
operate. This report derives the inverse kinematics
of the Canfield Joint and explores how variations in
component length affect the joint’s mobility and
operating envelope.
Figure 1: An original model of a Canfield Joint [1]
2. Methodology
2.1. Model Development
A MATLAB® model of the Canfield Joint was
developed following the methods of Dr. Edward
Haug [2]. A simplistic diagram of the joint was
drawn wherein the base plate and the top plate (or
distal plate) are equilateral triangles of unit side
length, and both the upper and lower arm segments
of each of the three arms are simply straight lines of
unit length. By normalizing to unit lengths, distance
and directionality may be considered unitless and
are easily scaled. The joint is nominally posed with
no rotation of the distal plate, and the arms bent at
45°, such that the distance from the base plate to
distal plate is √2. Figure 2 shows this diagram,
where the local coordinate frame for each
numbered component is shown, and the letters
denote kinematic joints.
Figure 2: Diagram of kinematic model in MATLAB®
Although the joint allows for the distance between
base and distal plates to vary, it is commonly
desired for that distance to remain fixed. This
analysis will focus on hemispherical motion
provided by leg 4 reaching its maximum extents in
either direction, while the remaining legs, 2 and 6,
adjust symmetrically to each other such that the
hemispherical distance is maintained.
Φ𝑑𝑟𝑖𝑣𝑒𝑟𝑠 = {{𝑟8}
𝑇{𝑟8} − 𝑅2
𝜃𝐷 − 𝜃𝐷𝑠𝑡𝑎𝑟𝑡 −𝜔 ∗ 𝑡𝑦3 − 𝑦7
} (1)

Per Dr. Haug’s method for inverse kinematics,
these constraints can be mathematically written as
in Equation 1. To simulate the kinematics of the
mechanism, the kinematics at each joint must be
written as mathematical constraints also. The
“elbow” in the middle of each leg is typically
constructed as a series of three revolutes which
allow rotation in any direction without translation.
This is identical in principle to a single spherical
joint, which is used in this kinematic model for
simplicity. The way these constraints are
formulated is demonstrated in Equation 2.
Φ𝑘𝑖𝑛𝑒𝑚𝑎𝑡𝑖𝑐 =
{
{𝑟1}
𝐴 − {𝑟2}𝐴
{𝑓2̂}𝑇{𝑓�̂�}
{ℎ2̂}𝑇{𝑓�̂�}
{𝑟2}𝐵 − {𝑟3}
𝐵
{𝑟3}𝐶 − {𝑟8}
𝐶
{𝑓3̂}𝑇{𝑓�̂�}
{ℎ3̂}𝑇{𝑓�̂�}
⋮ }
These constraints denote the revolute, spherical,
and revolute that are along one leg of the
mechanism. The other legs follow the same pattern.
By driving these constraints to zero, kinematic
consistency is maintained.
2.2. Inverse Kinematics
As Dr. Haug describes in his solution method, given
the driver and kinematic constraints defined above,
as well as the mathematical constraint of attitude
quaternions being unit vectors, a Newton-Raphson
iterative solver can be employed to solve for the
positions and attitudes of each component to meet
the set of constraints. In order to do so, a Jacobian
matrix must be computed. The Jacobian matrix
denoted Φq is the combined constraint vector
differentiated with respect to all of the generalized
coordinates, q, which are the position and attitude
coordinates for each moving component. As such,
the Newton-Raphson solution iterates the equation
𝑞𝑖+1 = 𝑞𝑖 −Φ𝑞−1 ∗ Φ
until convergence is achieved. In this case, an
under-relaxation factor of 0.5 was also used to aid
in convergence.
To simulate the range of motion of the mechanism,
the Newton-Raphson solution was employed at
multiple steps as the driving leg angle rotated in
either direction until the kinematic solution was no
longer able to converge. This method was then
employed while varying the hemispherical distance
between plates, or while varying the length of the
upper arm segments relative to the lower arm
segment length.
2.3. Trade Study Design Space
The effects on arm lateral extent and hemispherical
range of motion were investigated for a range of
hemispherical distances and upper arm segment
lengths.
Figure 3: Extreme cases of (a) hemispherical distance
and (b) upper arm segment length investigated
The distance between centers of base plate and
distal plate, denoted R, was varied across a range
from 0.5 below to 0.5 above the nominal R of √2.
While the Canfield Joint is typically designed with
the upper and lower arm segments of equal length,
this study shows the effect of varying the upper arm
segment length, L, across a range of values from 0.5
to 1.6.
3. Simulation Results
The results of the simulation are characterized by
the most extreme lateral distance of the driving arm
from the centerline, d, and the angle of the distal
plate relative to the base plate.
(2)
(3)

Figure 4: Operative values for trade study
Varying the hemispherical distance R, while
maintaining nominal unit length arm segments,
represents a variation that can be achieved just by
changing the pose of a traditionally built Canfield
Joint. The results of the described variance
performed in this simulation are shown in Figure 5.
Figure 5: Simulation results from varying R
The maximum lateral extent of the arm remains
nearly constant across R values at a value of
approximately 1.5, which corresponds to the
distance reached when the lower arm is straight out
horizontal to the base plate. The maximum extent
does drop off on the extreme upper end, but as
shown from the distal rotation angle plot, that
corresponds to a sharp decrease in angular range.
These results indicate that for most general use
cases of a Canfield Joint of this geometry, a
normalized R distance of approximately 1.7
maximizes the range of angles achievable without
increasing the lateral space requirements.
Varying the upper arm length L represents a break
from the traditional geometry of matched upper and
lower arm length, but shows how the response can
be tailored. For this simulation, the nominal R of √2
was maintained for each new arm length, and the
results are displayed in Figure 6.
Figure 6: Simulation results from varying L

In this case, the arms stick out further with
increasing L, while the maximum angle is highest
at the extremes. Depending on usage requirements,
a Canfield Joint mechanism may be well served
having upper arms half the length of the lower arms
to achieve a good angular range with minimal
lateral extension.
4. Conclusion
The Canfield Joint is a practical mechanism for
achieving rotational motion without the issues of
traditional gimballed mechanisms. This paper has
provided a process for kinematically modeling a
parametric Canfield Joint for the purpose of
tailoring dimensions to optimize for various
requirements on the range of motion. This work
demonstrates how such a model can be used to
evaluate dimensions for designing a joint to fit
within specific space constraints.
References
[1] Canfield, Stephen L.. “Development of the
Carpal Wrist; a Symmetric, Parallel-
Architecture Robotic Wrist.” (1997).
[2] Haug, Edward. "Computer-Aided
Kinematics and Dynamics of Mechanical
Systems Volume-I." (1989).

1 Copyright © 20xx by ASME
KINEMATIC AND DYNAMIC ANALYSIS OF A BICYCLE RIDER IN DIFFERENT RIDING POSITIONS
Claire Rodman Pennsylvania State University University Park, Pennsylvania
Ankit Saxena Pennsylvania State University University Park, Pennsylvania
ABSTRACT
A bicycle rider forms a 4-bar mechanism with the bicycle when riding in seated position. In order to go faster, the rider may ride the bicycle in a standing position. This position changes the mechanism and helps propel the rider using less effort. The standing position may give the rider a mechanical advantage but also affects the force being applied on the rider’s joints. This paper analyzed 4-bar mechanisms simulating the two riding positions and compared the kinematics and dynamics of the two mechanisms. With comparable accelerations of the fourth link (the link the rider relies on to propel the bicycle), the force on the knee joint of the rider and crank torques generated were as much as 10 times higher when standing rather than sitting.
METHODOLOGY
A computer simulation of the two mechanisms was conducted assuming that the mechanisms are both in a 4-bar configuration [FIG 1] [FIG 2]. Data from an anthropomorphic study[1] was used to find information about body segment masses, centers of mass, and radii of gyration (to calculate moments of inertia in the sagittal plane). The length and weight of the links were obtained from the rider who participated in the experimental study [Table 1] [Table 2]. For both configurations in both experimental and simulation, link 2 was the bicycle crank and link three was the rider shank and foot, together assumed to be one rigid body. For the seated model, link 4 is the rider’s thigh, whereas in the standing position the link is the combined average of the thigh, torso, head, and arms. The kinematics and dynamics of the two mechanisms were then simulated using on Matlab to obtain the position, velocity and acceleration of the links along with the forces on the joints and crank torques.
To validate the results of the simulation, an experimental study was then conducted. To study the experimental kinematics, a rider was recorded on camera riding a stationary exercise bicycle in the two configurations. The rider attempted to maintain a speed of 60 revolutions per minute, the same rate used in the simulations. Red markers were placed on the rider’s joints and the bicycle frame to highlight the joints of the mechanism in the video. The still frame video was taken using an iPhone at 30 fps and then each frame was extracted [FIG 3] from the video using ffmpeg, a free video processing tool. The locations of the red markers were recorded and processed to determine the
Sitting Position
Mass (kg)
Center of Mass (m)
Moment of Inertia (kgm^2)
Link 2 0.25 {0.075, 0}' 4.69E-04
Link 3 1.74 {0.227, -0.023}' 0.0279
Link 4 4.21 {0.332, 0}' 0.155 Table 1: Link data Approximations for Sitting Position
Standing Position
Mass (kg)
Center of Mass (m)
Moment of Inertia (kgm^2)
Link 2 0.25 {0.075, 0}' 4.69E-04 Link 3 1.74 {0.227, -0.023}' 0.0279 Link 4 49.31 {0.504, 0}' 1.815
Table 2: Link data Approximations for Standing Position
FIG 1: Mechanism in Seated Position[2].

2 Copyright © 20xx by ASME
FIG 2: Mechanism in Standing Position[2]
FIG 3: Sample Frame from Rider video in Seated Configuration
trajectory and motion of each link. With trajectory information, the velocity and acceleration were then calculated using Matlab.
The results from the simulations and the experimental study were then compared to assess the validity and limitations of the 4-bar assumptions made to analyze the bicycle rider in both the seated and standing configuration.
RESULTS
The kinematic and dynamic simulations on Matlab were used to observe the motion of the crank and the force on the knee of the rider. The angular acceleration [FIG 4] of link 4, the effective driving link of the rider, was plotted against the crank angle. For both the seated and standing positions, these link angular accelerations have comparable magnitudes and maximum values, occurring at slightly different points in one revolution. The crank (link 2) torque [FIG 5] was also plotted against crank angle to analyze the driving forces that would propel the bicycle forward were it not stationary. The force on knee joint (revolute joint C) was also plotted against the crank angle [FIG 6] to quantify the dynamics involved with this physiologically important joint. We observed that despite the similar link 4 accelerations, the forces on the knee and crank torque generated by the rider are significantly higher for the standing configuration. The maximum values are on the order of magnitude of 10 times higher than the seated position. This is due to the differences in effective weights of link 4. When the rider shifts her weight off the seat, link 4 includes the torso, head and arm weight, in addition to the thigh. The increased forces on the knee and increased crank torque are supplied by the rider’s body weight, in addition to the muscular activity driving the seated riding configuration.
FIG 4: Angular Acceleration of driving link 4 vs. Crank Angle for Seated and Standing Position
2
3
4
A
B
C
D

3 Copyright © 20xx by ASME
FIG 5: Crank Torque vs Crank Angle for Seated and Standing Position
FIG 6: Force on Knee from link 4 vs. Crank Angle for Seated and Standing Position To examine the validity of our 4-bar model of cycling, the trajectories of the mechanisms obtained during the experimental study were compared to the trajectories of the configurations in simulation. [FIG 7]. For the seated configuration, the experimental joint trajectories were similar to the simulated ones Differences in the joint paths can be mostly attributed to the filming limitations, which resulted in slightly warped, tilted footage. Comparing the link 3 and 4 angles in seated position in simulation and experiment [FIG 8] shows similar trends and values over one crank revolution. However, we see significant differences between the experimental and simulated joint trajectories at the knee [FIG 7]. This disagreement continues when looking at link 3 and link 4 angles over one crank revolution. [FIG 9] reveals that the experimental results in the standing position diverge from the simulated results. These results indicate that modeling the thigh and upper body as one
FIG 7: Joint trajectories for the two riding configurations in simulation and experiment
FIG 8: Link Angles in Seated Positing. Simulation vs Experimental
FIG 9: Link Angles in Standing Positing. Simulation vs Experimental

4 Copyright © 20xx by ASME
link of fixed length and configuration creates problems when analyzing the standing rider.
FIG 10: Crank Angle for Seated Position, Simulation vs Experimental
FIG 11: Crank Angle for Standing Position, Simulation vs Experimental Angular acceleration of link 4 for the seated position [FIG 10] follows a similar curve in the experimental and simulated results, however the experimental curve is plagued with noise. For the standing position, there is rough agreement in the angular acceleration of link 4 between experiment and simulation, however the results diverge after approximately half of one crank rotation [FIG 11]. This experimental data is also quite noisy.
The noise in the experimental acceleration results are due to the use of numerical differentiation techniques. Because of the multiple derivatives required to get acceleration from position, the error accumulated from the original trajectory digitization. This error propagation led to poor kinematic results and even worse dynamics, so the knee joint reactions could not be validated with this experimental technique.
CONCLUSIONS Using simulations validated with experiments, we conclude
that the 4-bar mechanism is a valid approximation of a seated cyclist when analyzing the kinematics and dynamics of the system. For the standing configuration, it is observed from the simulated results that the knee joint force is 10 times higher than the seated position. The results were not fully verified by the experimental process as the experimental data diverged from the simulated results in the standing position, however the order of magnitude difference seen is supported by the 10-fold increase in mass of link 4. The simulation-experiment disagreement demonstrates that the 4-bar approximation for the standing position does not capture the full complexity of the rider motion when the whole body is used. Additional links could be incorporated into the model to account for the additional degrees of freedom added by using the upper body.
In this experiment, the rider maintained a roughly constant ankle joint angle and rode at an average crank velocity of 60 rpm. For more advanced riding tasks like attempting a maximum speed or specifying a constant power output, perhaps the ankle joint would play an important role in the kinematics and dynamics involved with accelerating the crank during leg down and up strokes. In this case, the ankle shouldn’t be ignored. This update would involve separating the shank-foot link 3 into two separate links. However, for this simple task, the simple 4-bar mechanism approximates a complex system fairly well.
ACKNOWLEDGMENTS The foundation for the Matlab algorithm used in the project
was generously provided by Dr. H.J Sommer, professor of Mechanical Engineering at Penn State via the ME 581 course.
REFERENCES
[1] P. Leva, "Adjustments to Zatsiorsky-Seluyanov's segment inertia parameters," J. Biomech., vol. 29, No. 9, pp1223 - 1230.
[2] P. D. Soden and B. A. Adeyefa, “Forces applied to a bicycle during normal cycling,” J. Biomech., vol. 12, No. 7, pp. 527–541, 1979.

ME 581: Simulation of Mechanical Systems 5-axis robotic arm for AM
Byeong-Min Roh (bxr948)
Abstract
In this project, a 5-axis robotic arm for additive manufacturing (AM) is presented which increases design complexity. Denavit-Hartenberg method was used for describing coordinate frame of each joint. Forward and inverse kinematics are used to compute the joint positions and rotation angles. Simulation result for predicting trajectory is used for validate AM system of 5-axis robotic arm.
1. Motivation
The development of AM is driven by many industries such as aerospace, automotive and biomedical applications because AM provides better opportunities to produce complex geometries and parts [1]. However, there are limitations of using AM in manufacturing area in terms of overhang angle, solidification and distortion [2, 3]. Most of current AM is limited in 3-axis printing while it requires large amount of support structure during the printing process. If 5-axis robotic arm is adopted for AM process, support structure can be heavily reduced with a larger design flexibility of the model. The 5-axis AM printing toolpath will be designed based on the input model while the joint rotation and translation in order to achieve the final destination joint position will be discussed in this report.
2. Methodology
2.1. Model Development
The Denavit-Hartenberg method was used to describe each joint coordinate frame with respect to the surrounding joints and global coordinate frame. The Denavit-Hartenberg methodology has specific requirements for attaching a coordinate system to each revolute joint. Figure 1. illustrates these requirements in addition to the link parameter definitions below.
ai = link length
αi = the angle from Zi to Zi+1 measured about Xi
di = joint translation distance θi = joint rotation angle In addition to the variable definitions of the location and rotation of each coordinate frame, there are also requirements for how one frame is oriented relative to the next frame. The Z axis of frame {i} called Zi is coincident with joint axis i. Xi points along ai in the direction from joint i to joint i+1. Yi is formed by the right hand rule to complete the ith frame. A diagram of the selected coordinate frame for a 5-Revolute, 5 degree of freedom robotic arm is shown in Figure 1. Table.1 presents the corresponding joint parameters associated with each coordinate frame.
Figure 1: Illustration of coordinate frame setup and associated link parameters for the robotic arm. Each coordinate system associated with each joint in shown in red lines in the Figure 1. The link parameter and joint variables are shown in Table.1 below.

Table 1: Denavit-Hartenberg link parameter for coordinate frames i=1-4. Using the link parameters from Table 1, a transformation matrix can be formed that describes the rotation and translation of coordinate frame i in relation to coordinate frame i-1. Equation 1 derived the transformation T, from i to i-1 [1, 2].
2.2. Forward Kinematics
Using the general transformation definition from equation, transformation matrices for each coordinate frame are created below, using parameters from Table 1.
A final description of the end point P with relation to the global coordinate frame can be reached by multiplying all transformation matrices together.
Each index of the final matrix is represented by a rotation, rii, or coordinate point Pi. This is used to substitute for lengthy equations that belong to each index of the final transformation matrix [1]. Equation represents the global coordinates of the arm end point P shown in Figure 2. Variables PX, PY, and Pz correspond to the global X, Y, and Z coordinates.
Now that a forward kinematic description of the robotic manipulator has been checked, it is useful to verify the correctness of the math by isolating each joint angle, and varying it from 0 to 2π to validate the end point of the arm is at the correct global coordinates. Figures 2-5 below confirm this validation process.

Figure 2: Joint2 motion from theta 1 = 0 to 2*π,
Figure 3: Joint3 motion from theta2 = 0 to 2*π
Figure 4: Joint4 motion from theta3 = 0 to 2*π
Figure 5: Joint5 motion from theta4 = 0 to 2*π, d5 = 129.5mm
2.3. Inverse Kinematics and Matlab Execution
Once the forward kinematics of the transformation matrices has been validated, the inverse kinematic equations can be derived. The inverse kinematics of the robotic arm allows you to input a desired trajectory and solve for the required joint angles, velocities or joint accelerations to achieve specified trajectory requirements for end point P. Closed form solutions can be solved for joint angles algebraically, however with increasing complexity it is better to solve the equations numerically, or with an iterative solving algorithm. When solving the inverse kinematics for a high degree of freedom manipulator, there are often many solutions to reach a specific coordinate. Often times it is desired that the robotic arm keep an “elbow up” configuration to prevent the arm from hitting the ground or itself, like it would in an elbow down configuration. Due to geometry constraints, as well as joint limits, it is often helpful to find a solution that is close to a specified pose. For this reason, it is useful to use the Newton-Raphson iterative technique to solve for joint angles. Providing an initial guesstimate of all the model’s states, such as estimated joint angles, and plugging these states into the Newton-Raphson equation below. The equation will get closer and closer to a correct solution by minimizing the system’s

residuals, or error, to a given value specified by the user.
The Jacobian and residuals used in are described in equations, and.
The Jacobian matrix is derived by taking the partial derivatives of PX, PY, and PZ from equation with respect to θ1- θ5. The residual δT is computed by plugging the guesstimate angles into the forward kinematic equations to solve for PX, PY, and PZ. Trajectory coordinate.
We can derive from :
From:
From:
From:
From:
These rotation angles match the input from Section.1 forward kinematics.
3. Simulation and Results
In this section, we derive the numerical relationship among from the inverse kinematics.
The relationship is shown below:
The plot from Figure 6-9 shows the relationship between theta1 to theta 2-5.
Figure 6: Plot of joint 2 angles along joint1 angles
Figure 7: Plot of joint 3 angles along joint1 angles

Figure 8: Plot of joint 4 angles along joint1 angles
Figure 9: Plot of joint 5 angles along joint1 angles The joint 5 simulation trajectory based on the joint 1 rotation is shown from Figure 10-12.We can see from these figures, when theta 1 = 30, the Px, Py, Pz match the joint 5 location in section 2 forward kinematics.
Figure 10: Plot of trajectory Px along joint1 angles
Figure 11: Plot of trajectory Py along joint1 angles
Figure 12: Plot of trajectory Pz along joint1 angles
4. Conclusion
By using forward and inverse kinematics of the 5-axis robotic arm, we can have a map from the end joint to the driving link relation. After obtaining the relationship among each joint, we can derive the force, velocity through inverse kinematics and dynamics. This project has provided an initial overview of the steps taken to analyze the inverse kinematics of a 5-axis robotic arm mechanism to assess joint rotation angle while conducting a commanded task. REFERENCES [1] Wohlers Associates, Inc., 2013, “Wohlers Report 2013: Additive Manufacturing and 3D Printing State of the Industry,” Wohlers Associates, Fort Collins, CO. [2] Huang, Y., Leu M.C., Mazumder, J., and Donmez, A., 2015, “Additive manufacturing: current state, future potential, gaps and needs, and

recommendations,” ASME J. Manuf. Sci. Eng. 137(1): 1–10. [3] Bourell D. L., Beaman J. J., Leu M. C., and Rosen D. W., 2009, “A Brief History of Additive Manufacturing and the 2009 Roadmap for Additive Manufacturing: Looking Back and Looking Ahead,” Proceedings of RapidTech 2009: US-TURKEY Workshop on Rapid Technologies, Istanbul, Turkey, Sept. 24–25, pp. 1–8.

ME 581: Final Project Bicycle Rear Derailleur
Kinematic Analysis and Simulation
Jason Sammut
Abstract
Bicycle derailleur mechanisms are a crucial
component in high performance cycling that allow
cyclists to shift between gears in fractions of a
second. To understand how one may optimize
derailleur performance or tune shifting cables, it is
important to analyze the mechanical behaviors of
these mechanisms which produce the desired
shifting motion. An existing rear derailleur
assembly was reverse-engineered to create
simplified CAD models of each component, and
subsequently an extensive MATLAB code was
written to analyze the kinematics and important
parameters of the mechanism throughout the
shifting cycle. This code was then used to create an
animation of the derailleur mechanism motion.
2. Methodology
2.1. Rear Derailleur Mechanism
Rear bicycle derailleurs are components placed
directly under the rear cassette, or set of gears,
which guide the chain along the desired gear by
controlling the horizontal position of the chain. A
sample rear derailleur assembly in use can be seen
in Figure 1. The main body of the assembly opens
and closes to control the gear location, while the
long arm extended under the main body keeps
tension in the chain for different gear sizes.
2.2. Model Development
The primary mechanism in a rear derailleur can be
modeled as a parallelogram four-bar, as seen in
Figure 2. Link 1 is the component that is directly
mounted to the frame of the bicycle, and thus will
be treated as the ground link for analysis. The
mechanism “opens” as the angle between Link 1
and Link 2 increases, which shifts Point M (shown
in Figure 3) to a larger gear size. An additional
degree of freedom is found in this assembly, which
is the rotation of the pulley component at Point M.
Since this link is not directly controlled by the
motion of the primary four-bar mechanism, but
rather is determined based on chain length and gear
size, this link will not be included in kinematic
analysis, but its position can be post-processed.
Figure 1: Rear Derailleur assembled on bicycle.
Figure 2: Diagram of parallelogram four-bar
mechanism with points and links as used for analysis.
Figure 3: Diagram of specified point locations and
distances, used for active and passive drivers.

In this assembly, a linear spring exists between
Point K and Point L which pulls the mechanism
toward the “closed” position, which is how a
derailleur passively controls gear location. A
shifting cable (not shown in Figures 2 or 3) runs
between Point C and Point H, which is controlled
by the cyclist to manually “open” the mechanism,
shifting to a larger gear size. In this instance,
pulling the cable stretches the linear spring,
however to shift to a smaller gear size the cable is
slacked a certain distance to allow the linear spring
to close the mechanism one step. The amount of
cable that is pulled or slacked is how the cyclist can
“tune” the bicycle to ensure proper chain placement
and prevent frictional losses experienced when
cycling with a chain position between gears.
It is noted that since the four-bar motion is planar,
though in a plane oblique to the global coordinate
system, it would be possible to complete the
analysis with a 2-Dimensional kinematic analysis
and use this simulation to calculate desired 3-D
motion. However, all analyses were completed in
3-D coordinates to gain experience from analyzing
3-D models and working with coordinate system
relations between objects.
2.3. CAD Models and Coordinate Systems
Careful consideration was taken to choose
coordinate systems that allow for simplified
constraint analysis. Due to the oblique nature of the
mechanism components, as well as the
measurement limitation of using calipers rather
than methods such as 3-D scanners, it was difficult
to determine precise coordinate rotations and local
positions of important points on the components.
To aid in the accuracy of determining these
measurements, SolidWorks Computer Aided
Design (CAD) software was used to create
simplified models of the assembly, seen in Figure
4. With the use of this tool, it was possible to take
surface measurements on the derailleur assembly
components and use the program to calculate local
positions and initial estimates for global positions.
Figure 5 shows the local coordinate origins and
orientations chosen for each link. To simplify
constraint analysis, the X-axes were chosen to align
with the revolute rotational axes. An additional
double-prime coordinate system for Link 1 was also
created to align with these rotational axes. Since
estimations for the Euler parameters at the starting
position of the mechanism were required for
analysis, rotational [A] matrices needed to be
determined. A MATLAB code was created using
“make_ega” [1] and “vectarrow” [2] scripts, as well
as Z-Y-X rotational matrix definitions, to aid in the
visualization of the coordinate orientations. This
allowed for an easy comparison between
anticipated and calculated orientations.
Figure 4: CAD Model of the derailleur assembly.
Figure 5: Coordinate systems for each link.

2.4. Constraints and Drivers
The kinematic simulation notation used in ME 581:
Simulation of Mechanical Systems [1] was used
throughout this project. This notation requires
generalized coordinates, which for this mechanism
were chosen as the global location of the coordinate
origins {𝑟𝑖} and global Euler parameters {𝑝𝑖} for
Links 2, 3, and 4. This resulted in a vector of 21
generalized coordinates {𝑞}, seen in Equation (1),
which for inverse kinematics required a constraint
vector {𝜙} of 21 constraints, shown in Equation (2).
{𝑞} =
{
{𝑟2}
{𝑝2}
{𝑟3}
{𝑝3}
{𝑟4}
{𝑝4}}
; {𝑟𝑖} = {
𝑥𝑖𝑦𝑖𝑧𝑖} ; {𝑝𝑖} = {
𝑒0,𝑖𝑒1,𝑖𝑒2,𝑖𝑒3,𝑖
} (1)
In the true mechanism of the rear derailleur, it is
seen that four revolute constraints exist at Points D,
E, F, and G. However, in calculating the mobility
of this setup it is seen that the mechanism is over-
constrained. This is because the mechanism has
geometric relations which allow it to function as a
single degree-of-freedom system despite these
constraints. To solve this problem, in our analysis
two revolute constraints were chosen at Points D
and E, one spherical constraint at Point F, and one
cylindrical constraint at Point G, resulting in a
“RRSC” mechanism. This results in a mechanism
mobility of one, which is expected. Additional
choices of constraints could also be valid for this
mechanism, such as RCCC, however the RRSC
choice simplified the symbolic Jacobian. It was
attempted to verify the RCCC constraint choice
with the RRSC mechanism, but a Jacobian
determinant value of zero was found for the RCCC,
caused by an error in defining Jacobian terms.
From here, the 21x21 Jacobian matrix [𝜙𝑞] of the
system could be calculated based on the partial
derivatives of the constraints with respect to the
generalized coordinates.
{𝜙} =
{
{𝑟1}
𝐷 − {𝑟2}𝐷
{𝑓2}𝑇{𝑔1}
′′
{𝑓2}𝑇{ℎ1}
′′
{𝑟1}𝐸 − {𝑟3}
𝐸
{𝑓3}𝑇{𝑔1}
′′
{𝑓3}𝑇{ℎ1}
′′
{𝑟2}𝐹 − {𝑟4}
𝐹
{𝑓3}𝑇{𝑔4}
{𝑓3}𝑇{ℎ4}
{𝑔3}𝑇{𝑑𝐺𝐺}
{ℎ3}𝑇{𝑑𝐺𝐺}
{𝑝2}𝑇{𝑝2}
{𝑝3}𝑇{𝑝3}
{𝑝4}𝑇{𝑝4}
∗ 𝐷𝑟𝑖𝑣𝑒𝑟 ∗ }
; {𝑑𝐺𝐺} ={𝑟4}
−{𝑟3}𝐺
𝐺
(2)
Multiple different definitions of driver constraints
may be used for analysis of this mechanism. The
actual control of derailleur motion by the cyclist
comes from adjusting the cable length between
Points C and H, as described above. This would
result in a constraint that specifies the magnitude of
the distance 𝐷𝐶𝐻 to be equal to some specified
distance based on the desired gear size, which is
something that the cyclist is able to tune based on
gear locations. Another possible driver would be to
drive the angle between Links 1 and 2 at the
revolute, which would directly control the Euler
parameter combination for Link 2. However, the
simplest form of a driver for this mechanism was
chosen as the global Z-location of Point M, which
directly controls the position of the pulley
component in regards to gear location. As a first
analysis, this driver helps to easily define assembly
configuration at specified gear sizes. The constraint
equation for this driver definition can be seen in
Equation 3, which replaces the last row of the
constraint vector in Equation 2. The constant
𝑧4,𝑠𝑡𝑎𝑟𝑡𝑀 defines the initial gear location, Δ𝑧4
𝑀
determines the speed at which the derailleur shifts
gears, and time 𝑡 is broken into small time steps
used for analysis.
𝑧4𝑀 − 𝑧4,𝑠𝑡𝑎𝑟𝑡
𝑀 − Δ𝑧4𝑀𝑡 = 0 (3)

2.5. MATLAB Kinematics Code
A MATLAB inverse kinematics code was written
to analyze the derailleur mechanism at each time
step, using the base code and formulation found in
previous projects [1]. In this code, initial estimates
are used to determine approximate orientations, and
a Newton-Raphson algorithm uses the constraint
vector and Jacobian to reduce constraint residuals
until a desired assembly tolerance is reached. From
this solution at the initial time step, the new
generalized coordinate values are used at the
subsequent time step as initial estimates and the
process is repeated to calculate mechanism
position, orientation, and other important
parameters at each time step.
2.6. Mechanism Simulation & Visualization
One of the primary objectives for this project was
to animate the motion of the derailleur as it shifts
between gears to understand the mechanism motion
and compare the model from the MATLAB
simulation code to the CAD models and true
derailleur mechanism. The first step in being able
to visualize the mechanism was to use point
location results from the kinematics code to verify
that constraints were being met, and that point
locations were in proper positions. Simple scatter
plots of important point locations were created
through a “Plotting3DPoints” code at multiple time
steps to verify code functionality (Figure 6).
Secondly, models of the derailleur components
were to be imported into the MATLAB code from
the CAD models, in either point cloud or mesh
formats. An initial modification was made in the
kinematics code to read point locations from STL
files that were exported from SolidWorks. These
STL files exported point locations of each node on
the component, in their link’s respective local
coordinate frames. Local coordinates were
converted to global coordinates by use of the
rotation matrices and coordinate origins at each
individual time step.
Once point cloud results were verified, it was
desired to create entire object visualization via the
mesh information stored in the exported STL files.
To accomplish this, the connectivity matrices were
used to create solid-color faces for each element in
the mesh created by the SolidWorks STL. These
matrices relate three node numbers to each other,
forming a triangular element between nodes. A new
code “PlotFaces” was written to create 3-D face
plots of the components in their local coordinates to
verify functionality and coordinate accuracy from
the STL files, as seen in Figure 7. This method was
then integrated into the kinematic code to create
plots of the entire assembly at any given time step.
A sample plot of this output can be seen in Figure
8, for a small-gear location.
Figure 6: Scatter plot of important point locations.
Figure 7: Face plot of Link 3 in local coordinates.

Finally, an animation of the assembled mechanism
motion throughout the entire time cycle could be
created. To keep track of each node location and its
connectivity relation for each link over each time
step, three 4-Dimensional matrices were created
“xpts”, “ypts”, and “zpts”. These matrices stored
the following information in each respective
dimension: number of nodes on the element, point
number for that node, link number that node
corresponds to, and the time step in which that
location occurs. This information, coupled with the
“PtCldMatrix” (4-D matrix with point number, x-y-
z dimension, link number, and time step), allowed
faces to be created for each link separately, on the
same figure for a single time step, and this process
repeated for a new figure at each time step. Each
figure was then written as a frame in a movie file,
and the framerate controlled the speed at which the
animation showed the mechanism motion.
3. Simulation Results
3.1. Jacobian and Driver Functionality
As seen in previous projects, tracking the
determinant of the Jacobian is an important initial
check on the functionality of the kinematic code,
which can be seen in Figure 9 for this model. It is
reasonable that the determinant reaches a minimum
at about 45 degrees open, and begins to approach
zero at either end where a potential lock-up occurs.
The second initial check is to track the Z-location
of Point M, which is defined over time for the driver
constraint. Since an initial position of -20 mm was
chosen, and a linear driver of 30 mm in the negative
Z-direction (to open the mechanism) was chosen
over a total time of two seconds, the plot in Figure
10 confirms proper behavior of the driver. The
horizontal lines indicate gear locations, where the
top line is the smallest gear ring, and the bottom line
corresponds to the largest gear size.
3.2. Shifter Cable Displacement
Figure 11 displays a plot of the distance from Points
C to H, which corresponds to the shifter cable
displacement as controlled by the user, for the
entire range of motion from smallest to largest gear.
Note that the curvature of the plot is nearly linear.
Figure 8: Face plot of assembled mechanism.
Figure 9: Determinant of Jacobian vs. driver location
Figure 10: Driver location as a function of time.
Horizontal lines represent z-location of gears.

This linear behavior of the cable distance as a
function of gear position is important because it
allows the user to more easily and accurately tune
the shifting by determining a constant cable
displacement to shift between any set of gears. If
this plot was highly nonlinear, it would be much
more difficult to determine the exact distance the
cable must be pulled to shift up a gear, since it
would be based on the current gear location. This
makes it easy to adjust and tune over time as the
cable stretches slightly or other parameters on the
components change.
3.3. Linear Spring Displacement
Another important parameter to track for derailleur
performance and design is the displacement of the
linear spring as the driver shifts between gears. This
distance determines the force that is exerted
internally to the mechanism to drive the derailleur
closed. Since this linear spring becomes the driving
force in the mechanism when shifting to a smaller
gear, while the cable is being allowed to extend, it
is important that enough force be exerted to quickly
shift to the next gear set. It is important to avoid too
much slack in the shifter cable during this time, but
also important to not over-design the spring as to
break the shifter cable when shifting from the
largest gear sets.
4. Conclusion
This project displayed successful simulation and
animation of a rear bicycle derailleur assembly.
One can use this model to visualize the effects that
changes in component parameters or driver
definitions have on the overall motion of the
mechanism. It would also be quite simple to
compute accelerations of various point locations or
body origins to determine dynamic loading that is
present within the mechanism. This code base may
also be used in the future to simulate other 3-D
mechanisms and quickly visualize the motion of the
components over any defined time interval.
References
[1] Sommer, H.J., ME 581: Simulation of
Mechanical Systems, Course Notes and
MATLAB Code, PSU ME Department,
University Park, PA, 2019.
[2] Xiong, Rentian, MathWorks File
Exchange, MATLAB Open Source Code,
"vectarrow.m", Updated April 2005.
Figure 11: Cable distance between Points C and H.
Figure 12: Plot of distance between Points K and L,
which corresponds to the displacement of the linear
spring that drives the mechanism closed.

1 Copyright © 20xx by ASME
KINEMATIC AND DYNAMIC ANALYSIS OF A BICYCLE RIDER IN DIFFERENT RIDING POSITIONS
Claire Rodman Pennsylvania State University University Park, Pennsylvania
Ankit Saxena Pennsylvania State University University Park, Pennsylvania
ABSTRACT
A bicycle rider forms a 4-bar mechanism with the bicycle when riding in seated position. In order to go faster, the rider may ride the bicycle in a standing position. This position changes the mechanism and helps propel the rider using less effort. The standing position may give the rider a mechanical advantage but also affects the force being applied on the rider’s joints. This paper analyzed 4-bar mechanisms simulating the two riding positions and compared the kinematics and dynamics of the two mechanisms. With comparable accelerations of the fourth link (the link the rider relies on to propel the bicycle), the force on the knee joint of the rider and crank torques generated were as much as 10 times higher when standing rather than sitting.
METHODOLOGY
A computer simulation of the two mechanisms was conducted assuming that the mechanisms are both in a 4-bar configuration [FIG 1] [FIG 2]. Data from an anthropomorphic study[1] was used to find information about body segment masses, centers of mass, and radii of gyration (to calculate moments of inertia in the sagittal plane). The length and weight of the links were obtained from the rider who participated in the experimental study [Table 1] [Table 2]. For both configurations in both experimental and simulation, link 2 was the bicycle crank and link three was the rider shank and foot, together assumed to be one rigid body. For the seated model, link 4 is the rider’s thigh, whereas in the standing position the link is the combined average of the thigh, torso, head, and arms. The kinematics and dynamics of the two mechanisms were then simulated using on Matlab to obtain the position, velocity and acceleration of the links along with the forces on the joints and crank torques.
To validate the results of the simulation, an experimental study was then conducted. To study the experimental kinematics, a rider was recorded on camera riding a stationary exercise bicycle in the two configurations. The rider attempted to maintain a speed of 60 revolutions per minute, the same rate used in the simulations. Red markers were placed on the rider’s joints and the bicycle frame to highlight the joints of the mechanism in the video. The still frame video was taken using an iPhone at 30 fps and then each frame was extracted [FIG 3] from the video using ffmpeg, a free video processing tool. The locations of the red markers were recorded and processed to determine the
Sitting Position
Mass (kg)
Center of Mass (m)
Moment of Inertia (kgm^2)
Link 2 0.25 {0.075, 0}' 4.69E-04
Link 3 1.74 {0.227, -0.023}' 0.0279
Link 4 4.21 {0.332, 0}' 0.155 Table 1 : Link data Approximations for Sitting Position
Standing Position
Mass (kg)
Center of Mass (m)
Moment of Inertia (kgm^2)
Link 2 0.25 {0.075, 0}' 4.69E-04 Link 3 1.74 {0.227, -0.023}' 0.0279 Link 4 49.31 {0.504, 0}' 1.815
Table 2 : Link data Approximations for Standing Position
FIG 1 : Mechanism in Seated Position[2].

2 Copyright © 20xx by ASME
FIG 2 : Mechanism in Standing Position[2]
FIG 3 : Sample Frame from Rider video in Seated Configuration
trajectory and motion of each link. With trajectory information, the velocity and acceleration were then calculated using Matlab.
The results from the simulations and the experimental study were then compared to assess the validity and limitations of the 4-bar assumptions made to analyze the bicycle rider in both the seated and standing configuration.
RESULTS
The kinematic and dynamic simulations on Matlab were used to observe the motion of the crank and the force on the knee of the rider. The angular acceleration [FIG 4] of link 4, the effective driving link of the rider, was plotted against the crank angle. For both the seated and standing positions, these link angular accelerations have comparable magnitudes and maximum values, occurring at slightly different points in one revolution. The crank (link 2) torque [FIG 5] was also plotted against crank angle to analyze the driving forces that would propel the bicycle forward were it not stationary. The force on knee joint (revolute joint C) was also plotted against the crank angle [FIG 6] to quantify the dynamics involved with this physiologically important joint. We observed that despite the similar link 4 accelerations, the forces on the knee and crank torque generated by the rider are significantly higher for the standing configuration. The maximum values are on the order of magnitude of 10 times higher than the seated position. This is due to the differences in effective weights of link 4. When the rider shifts her weight off the seat, link 4 includes the torso, head and arm weight, in addition to the thigh. The increased forces on the knee and increased crank torque are supplied by the rider’s body weight, in addition to the muscular activity driving the seated riding configuration.
FIG 4 : Angular Acceleration of driving link 4 vs. Crank Angle for Seated and Standing Position
2
3
4
A
B
C
D

3 Copyright © 20xx by ASME
FIG 5 : Crank Torque vs Crank Angle for Seated and Standing Position
FIG 6 : Force on Knee from link 4 vs. Crank Angle for Seated and Standing Position To examine the validity of our 4-bar model of cycling, the trajectories of the mechanisms obtained during the experimental study were compared to the trajectories of the configurations in simulation. [FIG 7]. For the seated configuration, the experimental joint trajectories were similar to the simulated ones Differences in the joint paths can be mostly attributed to the filming limitations, which resulted in slightly warped, tilted footage. Comparing the link 3 and 4 angles in seated position in simulation and experiment [FIG 8] shows similar trends and values over one crank revolution. However, we see significant differences between the experimental and simulated joint trajectories at the knee [FIG 7]. This disagreement continues when looking at link 3 and link 4 angles over one crank revolution. [FIG 9] reveals that the experimental results in the standing position diverge from the simulated results. These results indicate that modeling the thigh and upper body as one
FIG 7: Joint trajectories for the two riding configurations in simulation and experiment
FIG 8: Link Angles in Seated Positing. Simulation vs Experimental
FIG 9: Link Angles in Standing Positing. Simulation vs Experimental

4 Copyright © 20xx by ASME
link of fixed length and configuration creates problems when analyzing the standing rider.
FIG 10 : Crank Angle for Seated Position, Simulation vs Experimental
FIG 11: Crank Angle for Standing Position, Simulation vs Experimental Angular acceleration of link 4 for the seated position [FIG 10] follows a similar curve in the experimental and simulated results, however the experimental curve is plagued with noise. For the standing position, there is rough agreement in the angular acceleration of link 4 between experiment and simulation, however the results diverge after approximately half of one crank rotation [FIG 11]. This experimental data is also quite noisy.
The noise in the experimental acceleration results are due to the use of numerical differentiation techniques. Because of the multiple derivatives required to get acceleration from position, the error accumulated from the original trajectory digitization. This error propagation led to poor kinematic results and even worse dynamics, so the knee joint reactions could not be validated with this experimental technique.
CONCLUSIONS Using simulations validated with experiments, we conclude
that the 4-bar mechanism is a valid approximation of a seated cyclist when analyzing the kinematics and dynamics of the system. For the standing configuration, it is observed from the simulated results that the knee joint force is 10 times higher than the seated position. The results were not fully verified by the experimental process as the experimental data diverged from the simulated results in the standing position, however the order of magnitude difference seen is supported by the 10-fold increase in mass of link 4. The simulation-experiment disagreement demonstrates that the 4-bar approximation for the standing position does not capture the full complexity of the rider motion when the whole body is used. Additional links could be incorporated into the model to account for the additional degrees of freedom added by using the upper body.
In this experiment, the rider maintained a roughly constant ankle joint angle and rode at an average crank velocity of 60 rpm. For more advanced riding tasks like attempting a maximum speed or specifying a constant power output, perhaps the ankle joint would play an important role in the kinematics and dynamics involved with accelerating the crank during leg down and up strokes. In this case, the ankle shouldn’t be ignored. This update would involve separating the shank-foot link 3 into two separate links. However, for this simple task, the simple 4-bar mechanism approximates a complex system fairly well.
ACKNOWLEDGMENTS The Matlab code used in the project was generously
provided by Dr. H.J Sommer, professor of Mechanical Engineering at Penn State via the ME 581 course.
REFERENCES
[1] P. Leva, "Adjustments to Zatsiorsky-Seluyanov's segment inertia parameters," J. Biomech., vol. 29, No. 9, pp1223 - 1230.
[2] P. D. Soden and B. A. Adeyefa, “Forces applied to a bicycle during normal cycling,” J. Biomech., vol. 12, No. 7, pp. 527–541, 1979.

1
ME 581: Simulation of Mechanical
Systems Kinematic and Dynamic Analysis of an
Oscillating Fan
Jon Young
Baily Thomas
1.0 ABSTRACT
A kinematic and dynamic analysis of an
oscillating fan mechanism is presented. The fan was
modelled and fabricated using a 3D printer, and an
analysis of the angular displacement, velocity, and
acceleration was executed. A parametric study
showing the effects of changing motor speed and
link length was performed as well. The masses and
mass centroids of each link were estimated
experimentally. The results showed that maximum
angular displacement, velocity, acceleration, and
motor torque were directly proportional to the
length of the driver link (link 3). These parameters
are relevant to the design of the fan as they dictate
the oscillation frequency and amplitude of the fan,
as well as the size of the motor needed to make the
fan operate.
2.0 METHODS
2.1 Design
The initial steps of beginning the fabrication
process was to model the oscillating fan mechanism
using Solidworks. Equation 1 shows the Grashof
Equation which was used to acquire a crank-rocker
system. In the equation s and l represent the shortest
and longest link lengths respectively while p and r
represent the remaining link lengths. Utilizing the
link lengths acquired from the Grashof equation,
Equation 1, and the skeletal diagram seen in Figure
1, the links were designed and assembled upon a
simple four spoke stand for stability.
𝑠 + 𝑙 < 𝑝 + 𝑟 (1)
Link 2 however was specifically designed to
support the fan motor, as well as gears B and C as
seen in Figure 1. All complex components of the
fan model were converted to STL files and printed
at the PSU Maker Commons using a polymer 3D
printer. All other components were purchased or
supplied by Dr. Sommer. A comprehensive list is
shown in Table 1.
Figure 1: 2D schematic of four bar mechanism used
in an oscillating fan (gear C → link 3)
Figure 2: 3D model of manufactured fan with
labelled links and reduction gears
2.2 Kinematics Modelling
To model the kinematics of the 4-bar crank-
rocker mechanism, global constraints were defined
in terms of global coordinates. The vector of global
coordinates q is given by
𝒒 = {𝒓2 𝜃2 𝒓3 𝜃3 𝒓4 𝜃4}𝑇 (2)
where ri and 𝜃𝑖 are the global position and
direction, respectively, of the local coordinate
system on body i. The local mass centroidal
coordinate systems can be seen in Figure 3. The
system is constrained by 4 revolute joints. The
constraint vector should be equivalent to the zero
vector, so Equation 3 states that the relative
displacement between two links connected at a
specific joint should be equal to zero,

2
Table 1: Bill of materials for fan
Part Specifications Purpose
Worm Gear/Wheel 1:40 Gear Ratio Reduce speed of motor
3D Printed Gears 1:3 Gear Ratio
Printed with 15% infill
Further reduce speed of the motor and drive
link 3
3D Printed Links Printed with 15% infill Create 4-Bar crank-rocker system
Motor 775 DC 24V/8000 RPM Dual
Shaft
Dual output shaft for oscillation mechanism
and the spinning of the fan blades
Power Supply Run at roughly 2V Used to maintain the voltage output at 2V
to acquire 600 RPM
Hardware M5 bolts and washers Used to assemble 4-bar system
𝝍 =
{
𝒓2𝐴 − 𝒓1𝐴𝒓3𝐵 − 𝒓2𝐵𝒓4𝐶 − 𝒓3𝐶𝒓1𝐷 − 𝒓4𝐷
𝜃3 − 𝜃30 −𝜔3𝑡}
(3)
where riX is the global position of body i joined at
joint X. The last parameter needed for kinematic
analysis is the Jacobian of the system, which maps
the constraint vector to a kinematically consistent
displacement vector. The Jacobian is defined as
𝚽 =
𝜕𝝍𝑖𝜕𝒒𝑗
(4)
which is a 9x9 matrix for a 2-dimensional 4-bar
mechanism. Since the global positions of the joints
and local coordinate systems was estimated, the
constraint vector is not the zero vector. To account
for this, Newton’s Method (recursive algorithm)
was used to approximate the positions of the mass
centroids of each link in the mechanism, shown in
Equation 5.
𝒒𝑖+1 = 𝒒𝑖 −𝚽𝑖−1𝚿𝑖 (5)
�̇� = 𝚽−1{𝟎 0 𝟎 0 𝟎 𝜔3 }𝑇 (6)
�̈� = 𝚽−1𝜸 (7)
The velocity and acceleration solutions are
given by Equations 6 and 7, respectively. Since the
motion of the oscillating fan mechanism is being
driven by the constant angular velocity of link 3, the
velocity of each link is only a function of the
Jacobian and the driver velocity 𝜔3. The vector 𝜸
in Equation 7 is the relative acceleration between
two links.
2.3 Dynamics Modelling
The torque exerted by the motor is the most
important dynamic parameter to determine as the
motor drives the motion of the fan. To determine
the reaction forces and torques at the joints,
Equation 8 is used
𝝀 = 𝚽−𝑇𝑴�̈� (8)
where M is the diagonal mass matrix of the system
containing information about the mass and mass
moment of inertial of each link. The mass of each
link, and components attached to the links, was
measured using a digital scale. The mass of each
component of the links is shown in Table 2.
The mass centroids of each link were estimated
by using boundary tracing software in MATLAB
with the solid model drawings being used as the
images to trace the boundaries of each modelled
link. The moments of inertia of additional
components were estimated using Equation 9 using
their respective geometry.
Table 2: Mass properties of each link
Link # Components Mass (g)
1 NA NA
2 Modelled Link 2
Motor
Worm Gear/Wheel
Fan Blades
Reduction Gear 2
26.6
590
32.4
18.9
4.3
3 Modelled Link 3
Reduction Gear 3
2
21.2
4 Modelled Link 4 7.1

3
𝐼 = ∫𝑟2d𝑚 (9)
The motor and fan blades were approximated as
cylinders and the worm gear and wheel (reduction
gear 2) were treated as point masses. The mass
centroids (and mass centroid coordinate systems)
are shown in Figure 3.
Figure 3: Mass centroidal coordinate systems
(global coordinate system in yellow)
3.0 RESULTS
3.1 Varying Driver Velocity
Varying the velocity of the motor does not have
and effect on the angular amplitude of oscillations,
it only increases the frequency of the oscillations.
The velocity, acceleration, and driving torque are
increased in both amplitude and frequency,
however. Figure 4 shows the torque required to
rotate link 3 for different motor angular velocities.
Figure 4: Torque output of the motor for different
operating speeds
Intuitively, the torque profile frequency is
linearly related to motor velocity, but the maximum
torque output by the motor is a nonlinear
(quadratic) function of velocity. At 600 RPM the
maximum torque is approximately 2.5 Ncm.
Doubling the velocity to 1200 RPM results in a
maximum torque of nearly 10 Ncm.
3.2 Varying Link Length
The length of link 3 was changed to determine
the effect it had on the motion of the system. The
determinant of the Jacobian was evaluated through
one complete revolution of link 3 to ensure it
remained nonsingular for each length. Figure 5A
shows that as the length of link 3 in increased the
range of the Jacobian determinant also increases,
and the maximum value gets closer to zero. Once
Grashof’s Law for a crank-rocker is no longer
satisfied, the Jacobian determinant goes to zero, and
is therefore singular, for some orientations of link
3. As the length of link 3 approaches zero, the
mechanism becomes a 3 bar system with a mobility
of zero, and the Jacobian remains constant.
The angular amplitude of oscillations is directly
proportional to the length of link 3. When link 3 is
0.5 cm, the range of the angular amplitude is
approximately 20°, whereas when link 3 is 1.5 cm
the angular amplitude is approximately 70°, which
can be seen in Figure 4B.
The angular velocity and acceleration of the fan
oscillations was very sensitive to changes in the
length of link 3. For a length of 0.5 cm the velocity
profile was approximately sinusoidal. For a link
length of 2 cm the velocity and acceleration of the
fan was much more erratic, experiencing a
maximum velocity of 120 deg/s and maximum
acceleration of approximately 800 deg/s2 over a
very short period of time, considering one full
oscillation took only 7 seconds.
Lastly, the torque output from the motor was
calculated for different lengths of link 3, shown in
Figure zzz. Since there were no external forces
applied to the links, the torque output from the
motor was proportional to the product of the inverse
Jacobian 𝚽−1, mass matrix M (see Equation 8), and
gear ratio between reduction gear 3 and the worm
gear on the motor (approximately a 1:55 ratio). For
this reason the torque profile over one full rotation
of link 3 was the same as that for the angular

4
Figure 5: A) Determinant of Jacobian, B) Angular displacement of fan, C) Angular velocity of fan, D)
Angular acceleration of fan
acceleration, but scaled by a factor of the inverse
Jacobian, mass matrix, and gear ratio.
CONCLUSION
The relationship between driver link length,
angular displacement, velocity, acceleration, and
torque were analyzed for an oscillating fan
mechanism. Small link 3 lengths should be used if
uniform oscillations are desired, where the velocity
in the clockwise and counter-clockwise directions
are similar, and larger lengths should be used if
larger oscillation amplitudes are desired.
For the physical assembly of the oscillating fan
mechanism, the values produced by the Grashof
equation did produce a crank-rocker 4 bar system.
However, due to issues with tolerancing, the fan
struggled to complete each cycle. This tolerancing
issue was primarily attributed to the fact that the 3D
printed parts were 15% infill instead of fully dense.
This meant that we were unable to tap the links to
ensure smooth mating of the mechanism.

1
ME 581: Simulation of Mechanical
Systems Kinematic and Dynamic Analysis of an
Oscillating Fan
Jon Young
Baily Thomas
1.0 ABSTRACT
A kinematic and dynamic analysis of an
oscillating fan mechanism is presented. The fan was
modelled and fabricated using a 3D printer, and an
analysis of the angular displacement, velocity, and
acceleration was executed. A parametric study
showing the effects of changing motor speed and
link length was performed as well. The masses and
mass centroids of each link were estimated
experimentally. The results showed that maximum
angular displacement, velocity, acceleration, and
motor torque were directly proportional to the
length of the driver link (link 3). These parameters
are relevant to the design of the fan as they dictate
the oscillation frequency and amplitude of the fan,
as well as the size of the motor needed to make the
fan operate.
2.0 METHODS
2.1 Design
The initial steps of beginning the fabrication
process was to model the oscillating fan mechanism
using Solidworks. Equation 1 shows the Grashof
Equation which was used to acquire a crank-rocker
system. In the equation s and l represent the shortest
and longest link lengths respectively while p and r
represent the remaining link lengths. Utilizing the
link lengths acquired from the Grashof equation,
Equation 1, and the skeletal diagram seen in Figure
1, the links were designed and assembled upon a
simple four spoke stand for stability.
𝑠 + 𝑙 < 𝑝 + 𝑟 (1)
Link 2 however was specifically designed to
support the fan motor, as well as gears B and C as
seen in Figure 1. All complex components of the
fan model were converted to STL files and printed
at the PSU Maker Commons using a polymer 3D
printer. All other components were purchased or
supplied by Dr. Sommer. A comprehensive list is
shown in Table 1.
Figure 1: 2D schematic of four bar mechanism used
in an oscillating fan (gear C → link 3)
Figure 2: 3D model of manufactured fan with
labelled links and reduction gears
2.2 Kinematics Modelling
To model the kinematics of the 4-bar crank-
rocker mechanism, global constraints were defined
in terms of global coordinates. The vector of global
coordinates q is given by
𝒒 = {𝒓2 𝜃2 𝒓3 𝜃3 𝒓4 𝜃4}𝑇 (2)
where ri and 𝜃𝑖 are the global position and
direction, respectively, of the local coordinate
system on body i. The local mass centroidal
coordinate systems can be seen in Figure 3. The
system is constrained by 4 revolute joints. The
constraint vector should be equivalent to the zero
vector, so Equation 3 states that the relative
displacement between two links connected at a
specific joint should be equal to zero,

2
Table 1: Bill of materials for fan
Part Specifications Purpose
Worm Gear/Wheel 1:40 Gear Ratio Reduce speed of motor
3D Printed Gears 1:3 Gear Ratio
Printed with 15% infill
Further reduce speed of the motor and drive
link 3
3D Printed Links Printed with 15% infill Create 4-Bar crank-rocker system
Motor 775 DC 24V/8000 RPM Dual
Shaft
Dual output shaft for oscillation mechanism
and the spinning of the fan blades
Power Supply Run at roughly 2V Used to maintain the voltage output at 2V
to acquire 600 RPM
Hardware M5 bolts and washers Used to assemble 4-bar system
𝝍 =
{
𝒓2𝐴 − 𝒓1𝐴𝒓3𝐵 − 𝒓2𝐵𝒓4𝐶 − 𝒓3𝐶𝒓1𝐷 − 𝒓4𝐷
𝜃3 − 𝜃30 −𝜔3𝑡}
(3)
where riX is the global position of body i joined at
joint X. The last parameter needed for kinematic
analysis is the Jacobian of the system, which maps
the constraint vector to a kinematically consistent
displacement vector. The Jacobian is defined as
𝚽 =
𝜕𝝍𝑖𝜕𝒒𝑗
(4)
which is a 9x9 matrix for a 2-dimensional 4-bar
mechanism. Since the global positions of the joints
and local coordinate systems was estimated, the
constraint vector is not the zero vector. To account
for this, Newton’s Method (recursive algorithm)
was used to approximate the positions of the mass
centroids of each link in the mechanism, shown in
Equation 5.
𝒒𝑖+1 = 𝒒𝑖 −𝚽𝑖−1𝚿𝑖 (5)
�̇� = 𝚽−1{𝟎 0 𝟎 0 𝟎 𝜔3 }𝑇 (6)
�̈� = 𝚽−1𝜸 (7)
The velocity and acceleration solutions are
given by Equations 6 and 7, respectively. Since the
motion of the oscillating fan mechanism is being
driven by the constant angular velocity of link 3, the
velocity of each link is only a function of the
Jacobian and the driver velocity 𝜔3. The vector 𝜸
in Equation 7 is the relative acceleration between
two links.
2.3 Dynamics Modelling
The torque exerted by the motor is the most
important dynamic parameter to determine as the
motor drives the motion of the fan. To determine
the reaction forces and torques at the joints,
Equation 8 is used
𝝀 = 𝚽−𝑇𝑴�̈� (8)
where M is the diagonal mass matrix of the system
containing information about the mass and mass
moment of inertial of each link. The mass of each
link, and components attached to the links, was
measured using a digital scale. The mass of each
component of the links is shown in Table 2.
The mass centroids of each link were estimated
by using boundary tracing software in MATLAB
with the solid model drawings being used as the
images to trace the boundaries of each modelled
link. The moments of inertia of additional
components were estimated using Equation 9 using
their respective geometry.
Table 2: Mass properties of each link
Link # Components Mass (g)
1 NA NA
2 Modelled Link 2
Motor
Worm Gear/Wheel
Fan Blades
Reduction Gear 2
26.6
590
32.4
18.9
4.3
3 Modelled Link 3
Reduction Gear 3
2
21.2
4 Modelled Link 4 7.1

3
𝐼 = ∫𝑟2d𝑚 (9)
The motor and fan blades were approximated as
cylinders and the worm gear and wheel (reduction
gear 2) were treated as point masses. The mass
centroids (and mass centroid coordinate systems)
are shown in Figure 3.
Figure 3: Mass centroidal coordinate systems
(global coordinate system in yellow)
3.0 RESULTS
3.1 Varying Driver Velocity
Varying the velocity of the motor does not have
and effect on the angular amplitude of oscillations,
it only increases the frequency of the oscillations.
The velocity, acceleration, and driving torque are
increased in both amplitude and frequency,
however. Figure 4 shows the torque required to
rotate link 3 for different motor angular velocities.
Figure 4: Torque output of the motor for different
operating speeds
Intuitively, the torque profile frequency is
linearly related to motor velocity, but the maximum
torque output by the motor is a nonlinear
(quadratic) function of velocity. At 600 RPM the
maximum torque is approximately 2.5 Ncm.
Doubling the velocity to 1200 RPM results in a
maximum torque of nearly 10 Ncm.
3.2 Varying Link Length
The length of link 3 was changed to determine
the effect it had on the motion of the system. The
determinant of the Jacobian was evaluated through
one complete revolution of link 3 to ensure it
remained nonsingular for each length. Figure 5A
shows that as the length of link 3 in increased the
range of the Jacobian determinant also increases,
and the maximum value gets closer to zero. Once
Grashof’s Law for a crank-rocker is no longer
satisfied, the Jacobian determinant goes to zero, and
is therefore singular, for some orientations of link
3. As the length of link 3 approaches zero, the
mechanism becomes a 3 bar system with a mobility
of zero, and the Jacobian remains constant.
The angular amplitude of oscillations is directly
proportional to the length of link 3. When link 3 is
0.5 cm, the range of the angular amplitude is
approximately 20°, whereas when link 3 is 1.5 cm
the angular amplitude is approximately 70°, which
can be seen in Figure 4B.
The angular velocity and acceleration of the fan
oscillations was very sensitive to changes in the
length of link 3. For a length of 0.5 cm the velocity
profile was approximately sinusoidal. For a link
length of 2 cm the velocity and acceleration of the
fan was much more erratic, experiencing a
maximum velocity of 120 deg/s and maximum
acceleration of approximately 800 deg/s2 over a
very short period of time, considering one full
oscillation took only 7 seconds.
Lastly, the torque output from the motor was
calculated for different lengths of link 3, shown in
Figure zzz. Since there were no external forces
applied to the links, the torque output from the
motor was proportional to the product of the inverse
Jacobian 𝚽−1, mass matrix M (see Equation 8), and
gear ratio between reduction gear 3 and the worm
gear on the motor (approximately a 1:55 ratio). For
this reason the torque profile over one full rotation
of link 3 was the same as that for the angular

4
Figure 5: A) Determinant of Jacobian, B) Angular displacement of fan, C) Angular velocity of fan, D)
Angular acceleration of fan
acceleration, but scaled by a factor of the inverse
Jacobian, mass matrix, and gear ratio.
CONCLUSION
The relationship between driver link length,
angular displacement, velocity, acceleration, and
torque were analyzed for an oscillating fan
mechanism. Small link 3 lengths should be used if
uniform oscillations are desired, where the velocity
in the clockwise and counter-clockwise directions
are similar, and larger lengths should be used if
larger oscillation amplitudes are desired.
For the physical assembly of the oscillating fan
mechanism, the values produced by the Grashof
equation did produce a crank-rocker 4 bar system.
However, due to issues with tolerancing, the fan
struggled to complete each cycle. This tolerancing
issue was primarily attributed to the fact that the 3D
printed parts were 15% infill instead of fully dense.
This meant that we were unable to tap the links to
ensure smooth mating of the mechanism.

MANUFACTURING A SPHERICAL FOUR-BAR MECHANISM
Ritika Menghani and Ellen Zerbe
Pennsylvania State University, State College, PA ABSTRACT
Students are very familiar with the standard planar four bar mechanism. A spherical four bar would assist in the transition to three dimensions by starting with a familiar design. The spherical four bar is also unique in that while it operates in three dimension in an x-y-z coordinate frame, it only operates in two dimensions when considering a spherical coordinate frame (ϕ and θ). The links for the mechanism were manufactured using 3D printing because it was the simplest and least expensive method for creating the geometry needed.
INTRODUCTION
Spherical four-bar mechanisms are similar to the more common planar four-bar mechanism in that they are created by four links with four revolute joints connecting them. When the axes of rotation for each revolute intersect at a single point, the mechanism is considered a spherical four-bar. The links then travel a path that lies on the surface of a sphere as the mechanism moves. These linkages are often used to replace multiple joints in instances where a more fluid motion is desired. The controlled motion of a spherical four-bar can be better than any unsteadiness that results from multiple joints. The folding mechanism on small airplane wings is an example of this.
Some work has already been done on the design of spherical four-bars using standard manufacturing methods [1] and specialized design software [2]. We decided to use additive manufacturing due to its ability to create complex geometry, its cost effectiveness, and its speed of manufacturing.
MATERIALS AND METHODS Each piece of the spherical four-bar mechanism was
modelled in SolidWorks and then printed using PLA. The designs were based off of an available spherical four-bar model on YouMagine [3]. Modifications were made in the redesigned pieces to better fit the intended joint system, ie: replacing snap fits with through hole. All four links and base connector were printed using the Mechanical Engineering department’s 3D printing services. The final iteration of the base was printed with a personal 3D printer where the layer thickness and infill density could be more controlled. A picture of the final assembly is shown in Figure 1.
FIGURE 1: Final assembly of the spherical four-bar mechanism.
RESULTS AND DISCUSSION 3D printing some of the parts required multiple iterations,
specially the base. Due to 3D printers generally undersizing holes, the base connector would not fit into the base and hence this required a little bit of redesign and reprinting. Figure 2 shows the iterations of the base.
FIGURE 2: Three printings of the base part. The orange piece was printed using the me department printing services and the piece on the right was the final product.
Another challenge encountered in this project was the stacking. Initially, standard machine bolts were selected as the joints between links, however, the bolt head ended up interfering with the motion of the links. This was resolved by using carriage bolts which have a smaller head and allow full
1

motion of all links. Figure 3 demonstrates the stacking issue and result when the bolts were switched.
FIGURE 3: The image on the left shows the stacking issue encountered. The image on the right shows the solution with the slimmer profile of the carriage bolts.
Three different link lengths were printed for link 4 (output link) in order to observe the change in motion. The link in the original design used a 37° angle for link 4 which is the same size as link 2; link 1 and link 3 also have approximately the same dimensions. This leads a rectangular formation of links, and when link 2 is horizontal it is impossible to tell which direction the mechanism is moving in if the velocity of link 2 is unknown. To work around this, two additional options for link 4 were printed, one traces 45° and the other traces 50°. When link 4 is swapped out for either of these two, a more definite posture is obtained and link 4 traces out an arc rather than completing a rotation.
CONCLUSION The spherical four-bar was manufactured using 3D
printing. Three different options were printed for link 4 to compare motion between case with equal lengths and case with link 4 greater than link 2. Improvements to the design would involve reworking the joint system. Shoulder screws could be used to create a connection that is flush with the surface of the link. Spacers could also be placed between links to increase the distance and avoid collision with the heads of the bolts. The radii of the links would need to be modified slightly for that design, since the some links would now be farther from the center of the sphere. Through this project, the authors learned about the limitations of 3D printing tolerances and the importance of stacking the links of a mechanism appropriately.
REFERENCES [1] Turner, Michael L., Perkins, David A., Murray,
Andrew P., and Larochelle, Pierre M. “Systematic Process for Constructing Spherical Four-Bar Mechanisms,” Proceeding of IMECE2005. IMECE2005-80058. Orlando, Florida, November 5-11 2005.
[2] Ruth, D. Alan and McCarthy, J. Micheal, “The Design
of Spherical 4R Linkages for Four specified Orientations.”
Mechanism and Machine Theory Vol. 34 No. 5 (1999). DOI 10.1016/s0094-114x(98)00048-2.
[3]https://www.youmagine.com/designs/spherical-4-bar-lin
kage-mechanism
2

ME 581: Simulation of Mechanical
Systems Kinematic Analysis of Delta
3-dimensional Printer
Yi Zhang
Abstract
3D printing is a rapidly developing manufacturing
technology in modern industry. For this project, a
simplified model is developed to investigate the
kinematics of a delta 3D printer. Several cases was
simulated both in forward and inverse kinematics,
in order to understand how the printer works.
1. Introduction
Current developments in the 3D printing industry
have revolutionized the way people consider the
manufacturing process. 3D printing offers design
and material freedom, speed of development, and
reduced capital investment in manufacturing. The
rewards of these key advantages have been
observed in medicine and medical devices together
with assistive technology due to the capability to
produce user-specific and advanced material
constructs and scaffolds. A typical delta 3D
printer has a print space that looks like a tall
cylinder.
Delta printers are a widely used sort of 3D desktop
printers. It support the extruder with three arms ,
which are attached to three vertical posts arranged
in a triangle, as shown in Fig 1. Delta printers are
built for fast printing, with heavy motors and
extruders fixed on the sides and top. The toolhead
is kept very light and minimal so that the printer
can maintain high accuracy at high speeds.
Figure 1: Delta 3-dimensional Printer
2. Methodology
2.1. Model Development and Definitions
A model of the 3D printer with six double
spherical joints, three prismatic joints and four
links was chosen at first, based on the structural
features of delta 3D printer, as shown in Figure
2(a). The system has 3 degrees of freedom.
There are three pairs of double spherical joints
between the toolhead platform and the vertical
posts. Approximately, the two rods in one pair can
be seen as parallel lines. Also it’s obvious that the
rods are of the same length, then they form a
parallelogram. Based on this assumption, it is easy
to prove that the platform is always horizontal, and
not able to rotate around any axis.
Using this conclusion, the model in Fig 2(a) can be
simplified to Fig 2(b). Three of double spherical
constraints are replaced by constraints on the
platform which limit it from any kind of rotation.
Without considering the fact that the two rods are
actually skew lines, the two models can be treated
equivalent.
(a) Original Model
(b) Simplified Model
Figure 2: Modeling of the Delta Printer

A common method to assign coordinate systems is
that of the Denavit-Hartenberg method. This
method has four constraints that must be adhered
in order to generate the coordinate system. They
are as follows:
Xi ⊥ Zi-1
Xi ∩ Zi-1 ≠ 0
Origin of joint i ∩ Xi and Zi
Coordinate system must be right handed.
Additionally, there are four parameters that are
used to describe the system described as follows:
ai = the distance from Zi to Zi+1 along Xi
αi = the angle from Zi to Zi+1 measured about Xi
di = the distance from Xi-1 to Xi along Zi
θi = the angle from Xi-1 to Xi about Zi
A diagram of the selected coordinate frame for the
3 degree of freedom mechanical system is shown
in Figure 3. Table 1 presents the corresponding
joint parameters associated with each coordinate
frame.
Figure 3: Illustration of coordinate frame setup and
associated link parameters for the model of printer.
i ai [mm] αi[deg] di[mm] θi[deg]
1 -60 0 103.92 0
2 0 0 -207.84 0
3 120 0 103.92 0
4 -60 0 0 0
Table 1: Denavit-Hartenberg parameters.
Using the link parameters from table 1, a
transformation matrix can be formed that describes
the rotation and translation of coordinate frame i in
relation to coordinate frames.
2.2. Forward and Inverse Kinematics
The mechanism has four links other than the
ground and hence twenty-eight coordinates.
The mechanism has six double spherical joints and
three prismatic joints, hence twenty-one kinematic
constraints. Also, three driver constrains need to
be specified. The driver constraints specify the
orientation of the active links. In forward
kinematics cases, the driver constraints are the y
location of three sliders. In inverse kinemarics
cases, the driver constraints should be of one point
on the platform, for example, the toolhead point P.
The Jacobian may be derived easily using the
following general formula for the partial derivative
of a revolute joint constraint
The position solution may be obtained by giving
an initial guess and then employing Newton-
Raphson using the constraint vector and the
Jacobian.
The coordinate, constraint vector and Jacobian
matric of forward and inverse kinematics are given
in Appendix 1. The coordinate and constraint
vector is 28 x 1, and the Jacobian matrix is 28 x 28.

3. Simulation and Results
The simulation of delta 3d printer was excuted in
Matlab. Using the Newton-Raphson iterative
method, three simple cases was simulated with the
following parameters from t = 0:0.1:500 second.
3.1. Forward Kinematics
For a test case in forward kinematics, the y-axis
location of three sliders was settled to drive the
platform. The toolhead point P was chosen to
observe the motion of the platform. Several
trajectories of point p is shown in Fig 4.
Figure 4: P trajectory in some special cases where
1) vA = 0.01cm/s 2) vB = 0.01cm/s 3) vC = 0.01cm/s
4) vA =vB = 0.01cm/s 5) vA =vC = 0.01cm/s
6) vB =vC = 0.01cm/s
The case 1) of Fig 4 was chosen to do further
simulation. In this case, the two sliders B and C is
fixed, and A goes down at a steady speed vA =
0.01cm/s. It is easy to prove that the trajectory of
point P is an arc. The resulting location and
velocity of point P on three direction x,y,z is
shown in Fig 5.
Figure 5: Plot of forward kinematics simulation
results
3.2. Inverse Kinematics
Fig 6 shows the resulting motion of the three
sliders when the platform along a straight line
trajectory. In this case, the function expression of
trajectory was y = 0 and x = 4z. Seen from the plot,
the location of three sliders was proportional to the
quadratic square of time t when P is around the
starting point.

Figure 6: Plot of inverse kinematics simulation
results along straight trajectory
Fig 7 shows the resulting motion of the three
sliders when the platform along a circular line
trajectory. In this case, the function expression of
trajectory was x2 + z2 = 25 and y = 0, and angular
velocity of P was ω = π/250 rad/s. The resulting
curves of location and velocity are all sinusoidal
and of the same period T = 2π/ω = 500s, which is
consistent with the kinetic inference result.
Figure 7: Plot of inverse kinematics simulation
results along circular trajectory
4. Conclusion
Using the Newton-Raphson iterative method,
the kinematics and dynamics of the delta printers
are just as easy as those of the 4 bar. This paper
has provided an initial overview of the steps taken
to analyze the system. However, the model used in
this paper is still an estimation. A more accurate
model is needed in further research work.

Appendix 1 Constraint Vector & Jacobian
Forward Kinematics
𝑞28 × 1
=
{
{𝑟2}
{𝑝2}
{𝑟3}
{𝑝3}
{𝑟4}
{𝑝4}
{𝑟5}
{𝑝5}}
Φ𝑓𝑜𝑟𝑤𝑎𝑟𝑑28 × 1
=
{
{𝑓1}
𝑇{�̂�2}
{ℎ̂1}𝑇{�̂�2}
{𝑓1}𝑇{𝑑𝑖𝑗}
{ℎ̂1}𝑇{𝑑𝑖𝑗}
{𝑓1}𝑇{ℎ̂2}
{𝑓1}𝑇{�̂�3}
{ℎ̂1}𝑇{�̂�3}
{𝑓1}𝑇{𝑑𝑖𝑗}
{ℎ̂1}𝑇{𝑑𝑖𝑗}
{𝑓1}𝑇{ℎ̂3}
{𝑓1}𝑇{�̂�4}
{ℎ̂1}𝑇{�̂�4}
{𝑓1}𝑇{𝑑𝑖𝑗}
{ℎ̂1}𝑇{𝑑𝑖𝑗}
{𝑓1}𝑇{ℎ̂4}
{𝑑𝑖𝑗}𝑇{𝑑𝑖𝑗} − 𝐿
2
{𝑑𝑖𝑗}𝑇{𝑑𝑖𝑗} − 𝐿
2
{𝑑𝑖𝑗}𝑇{𝑑𝑖𝑗} − 𝐿
2
{𝑓1}𝑇{�̂�5}
{ℎ̂1}𝑇{�̂�5}
{𝑓1}𝑇{ℎ̂5}
{𝑝2}𝑇{𝑝2} − 1
{𝑝3}𝑇{𝑝3} − 1
{𝑝4}𝑇{𝑝4} − 1
{𝑝5}𝑇{𝑝5} − 1
𝑦2 − 𝑦2 − ∆𝑦2𝑡𝑦3 − 𝑦3 − ∆𝑦3𝑡𝑦4 − 𝑦4 − ∆𝑦4𝑡 }
JAC𝑓𝑜𝑟𝑤𝑎𝑟𝑑28 × 28
=
{
0 −{𝑓
1}′[𝐴1]
′[𝐴2][𝑔]′[𝐺2] 0 0 0 0 0 0
0 −{ℎ1}′[𝐴1]
′[𝐴2][𝑔]′[𝐺2] 0 0 0 0 0 0
{𝑓1}′ −{𝑓
1}′[𝐴1]
′[𝐴2][�̃�2]′𝐴[𝐺2] 0 0 0 0 0 0
{ℎ1}′ −{ℎ1}′[𝐴1]
′[𝐴2][�̃�2]′𝐴[𝐺2] 0 0 0 0 0 0
0 −{𝑓1}′[𝐴1]
′[𝐴2][ℎ]′[𝐺2] 0 0 0 0 0 0
0 0 0 −{𝑓1}′[𝐴1]
′[𝐴3][𝑔]′[𝐺3] 0 0 0 0
0 0 0 −{ℎ1}′[𝐴1]
′[𝐴3][𝑔]′[𝐺3] 0 0 0 0
0 0 {𝑓1}′ −{𝑓
1}′[𝐴1]
′[𝐴3][�̃�3]′𝐵[𝐺3] 0 0 0 0
0 0 {ℎ1}′ −{ℎ1}′[𝐴1]
′[𝐴3][�̃�3]′𝐵[𝐺3] 0 0 0 0
0 0 0 −{𝑓1}′[𝐴1]
′[𝐴3][ℎ]′[𝐺3] 0 0 0 0
0 0 0 0 0 −{𝑓1}′[𝐴1]
′[𝐴4][𝑔]′[𝐺4] 0 0
0 0 0 0 0 −{ℎ1}′[𝐴1]
′[𝐴4][𝑔]′[𝐺4] 0 0
0 0 0 0 {𝑓1}′ −{𝑓
1}′[𝐴1]
′[𝐴4][�̃�4]′𝐶[𝐺4] 0 0
0 0 0 0 {ℎ1}′ −{ℎ1}′[𝐴1]
′[𝐴4][�̃�4]′𝐶[𝐺4] 0 0
0 0 0 0 0 −{𝑓1}′[𝐴1]
′[𝐴4][ℎ]′[𝐺4] 0 0
−2{𝑑𝐴𝐷}′ 4{𝑑𝐴𝐷}′[𝐴2][𝑠2̃]′𝐴[𝐺2] 0 0 0 0 2{𝑑𝐴𝐷}′ −4{𝑑𝐴𝐷}′[𝐴5][𝑠5̃]
′𝐷[𝐺5]
0 0 −2{𝑑𝐵𝐸}′ 4{𝑑𝐵𝐸}′[𝐴3][𝑠3̃]′𝐵[𝐺3] 0 0 2{𝑑𝐵𝐸}′ −4{𝑑𝐵𝐸}
′[𝐴5][𝑠5̃]′𝐸[𝐺5]
0 0 0 0 −2{𝑑𝐶𝐹}′ 4{𝑑𝐶𝐹}′[𝐴4][𝑠4̃]′𝐹[𝐺4] 2{𝑑𝐶𝐹}′ −4{𝑑𝐶𝐹}′[𝐴5][𝑠5̃]
′𝐹[𝐺5]
0 0 0 0 0 0 0 −{𝑓1}′[𝐴1]
′[𝐴5][𝑔]′[𝐺5]
0 0 0 0 0 0 0 −{ℎ1}′[𝐴1]
′[𝐴5][𝑔]′[𝐺5]
0 0 0 0 0 0 0 −{𝑓1}′[𝐴1]
′[𝐴5][ℎ]′[𝐺5]
0 2{𝑝2}′ 0 0 0 0 0 0
0 0 0 2{𝑝3}′ 0 0 0 0
0 0 0 0 0 2{𝑝4}′ 0 0
0 0 0 0 0 0 0 2{𝑝5}′[0 1 0] 0 0 0 0 0 0 00 0 [0 1 0] 0 0 0 0 00 0 0 0 [0 1 0] 0 0 0 }

Inverse Kinematics
𝑞28 × 1
=
{
{𝑟2}
{𝑝2}
{𝑟3}
{𝑝3}
{𝑟4}
{𝑝4}
{𝑟5}
{𝑝5}}
Φ𝑓𝑜𝑟𝑤𝑎𝑟𝑑28 × 1
=
{
{𝑓1}
𝑇{�̂�2}
{ℎ̂1}𝑇{�̂�2}
{𝑓1}𝑇{𝑑𝑖𝑗}
{ℎ̂1}𝑇{𝑑𝑖𝑗}
{𝑓1}𝑇{ℎ̂2}
{𝑓1}𝑇{�̂�3}
{ℎ̂1}𝑇{�̂�3}
{𝑓1}𝑇{𝑑𝑖𝑗}
{ℎ̂1}𝑇{𝑑𝑖𝑗}
{𝑓1}𝑇{ℎ̂3}
{𝑓1}𝑇{�̂�4}
{ℎ̂1}𝑇{�̂�4}
{𝑓1}𝑇{𝑑𝑖𝑗}
{ℎ̂1}𝑇{𝑑𝑖𝑗}
{𝑓1}𝑇{ℎ̂4}
{𝑑𝑖𝑗}𝑇{𝑑𝑖𝑗} − 𝐿
2
{𝑑𝑖𝑗}𝑇{𝑑𝑖𝑗} − 𝐿
2
{𝑑𝑖𝑗}𝑇{𝑑𝑖𝑗} − 𝐿
2
{𝑓1}𝑇{�̂�5}
{ℎ̂1}𝑇{�̂�5}
{𝑓1}𝑇{ℎ̂5}
{𝑝2}𝑇{𝑝2} − 1
{𝑝3}𝑇{𝑝3} − 1
{𝑝4}𝑇{𝑝4} − 1
{𝑝5}𝑇{𝑝5} − 1
𝑥5 − 𝑥5 − ∆𝑥5𝑡𝑦5 − 𝑦5 − ∆𝑦5𝑡𝑧5 − 𝑧5 − ∆𝑧5𝑡 }
JAC𝑓𝑜𝑟𝑤𝑎𝑟𝑑28 × 28
=
{
0 −{𝑓
1}′[𝐴1]
′[𝐴2][𝑔]′[𝐺2] 0 0 0 0 0 0
0 −{ℎ1}′[𝐴1]
′[𝐴2][𝑔]′[𝐺2] 0 0 0 0 0 0
{𝑓1}′ −{𝑓
1}′[𝐴1]
′[𝐴2][�̃�2]′𝐴[𝐺2] 0 0 0 0 0 0
{ℎ1}′ −{ℎ1}′[𝐴1]
′[𝐴2][�̃�2]′𝐴[𝐺2] 0 0 0 0 0 0
0 −{𝑓1}′[𝐴1]
′[𝐴2][ℎ]′[𝐺2] 0 0 0 0 0 0
0 0 0 −{𝑓1}′[𝐴1]
′[𝐴3][𝑔]′[𝐺3] 0 0 0 0
0 0 0 −{ℎ1}′[𝐴1]
′[𝐴3][𝑔]′[𝐺3] 0 0 0 0
0 0 {𝑓1}′ −{𝑓
1}′[𝐴1]
′[𝐴3][�̃�3]′𝐵[𝐺3] 0 0 0 0
0 0 {ℎ1}′ −{ℎ1}′[𝐴1]
′[𝐴3][�̃�3]′𝐵[𝐺3] 0 0 0 0
0 0 0 −{𝑓1}′[𝐴1]
′[𝐴3][ℎ]′[𝐺3] 0 0 0 0
0 0 0 0 0 −{𝑓1}′[𝐴1]
′[𝐴4][𝑔]′[𝐺4] 0 0
0 0 0 0 0 −{ℎ1}′[𝐴1]
′[𝐴4][𝑔]′[𝐺4] 0 0
0 0 0 0 {𝑓1}′ −{𝑓
1}′[𝐴1]
′[𝐴4][�̃�4]′𝐶[𝐺4] 0 0
0 0 0 0 {ℎ1}′ −{ℎ1}′[𝐴1]
′[𝐴4][�̃�4]′𝐶[𝐺4] 0 0
0 0 0 0 0 −{𝑓1}′[𝐴1]
′[𝐴4][ℎ]′[𝐺4] 0 0
−2{𝑑𝐴𝐷}′ 4{𝑑𝐴𝐷}′[𝐴2][𝑠2̃]′𝐴[𝐺2] 0 0 0 0 2{𝑑𝐴𝐷}′ −4{𝑑𝐴𝐷}′[𝐴5][𝑠5̃]
′𝐷[𝐺5]
0 0 −2{𝑑𝐵𝐸}′ 4{𝑑𝐵𝐸}′[𝐴3][𝑠3̃]′𝐵[𝐺3] 0 0 2{𝑑𝐵𝐸}′ −4{𝑑𝐵𝐸}
′[𝐴5][𝑠5̃]′𝐸[𝐺5]
0 0 0 0 −2{𝑑𝐶𝐹}′ 4{𝑑𝐶𝐹}′[𝐴4][𝑠4̃]′𝐹[𝐺4] 2{𝑑𝐶𝐹}′ −4{𝑑𝐶𝐹}′[𝐴5][𝑠5̃]
′𝐹[𝐺5]
0 0 0 0 0 0 0 −{𝑓1}′[𝐴1]
′[𝐴5][𝑔]′[𝐺5]
0 0 0 0 0 0 0 −{ℎ1}′[𝐴1]
′[𝐴5][𝑔]′[𝐺5]
0 0 0 0 0 0 0 −{𝑓1}′[𝐴1]
′[𝐴5][ℎ]′[𝐺5]
0 2{𝑝2}′ 0 0 0 0 0 0
0 0 0 2{𝑝3}′ 0 0 0 0
0 0 0 0 0 2{𝑝4}′ 0 0
0 0 0 0 0 0 0 2{𝑝5}′0 0 0 0 0 0 [𝐼3] 0 }

Appendix 2 Matlab Code
% dp_main_f.m % Forward Kinametics % initialize
clc
dp_ini; dp_kin_f; %or dp_kin_i;
% timer loop keep = [];
for t = 0:1:500 % kinematics dp_kin_f; %or dp_kin_i; % save kinematics y2 = r2(2); y3 = r3(2); y4 = r4(2); xP = r5P(1); yP = r5P(2); zP = r5P(3); keep = [keep; t y2 y3 y4 xP yP zP]; % bottom of timer loop end t = keep(:,1); y2 = keep(:,2); y3 = keep(:,3); y4 = keep(:,4); xP = keep(:,5); yP = keep(:,6); zP = keep(:,7); v2 = keep(2:501,2)-keep(1:500,2); v3 = keep(2:501,3)-keep(1:500,3); v4 = keep(2:501,4)-keep(1:500,4); vxp = keep(2:501,5)-keep(1:500,5); vyp = keep(2:501,6)-keep(1:500,6); vzp = keep(2:501,7)-keep(1:500,7);
% Delta 3D Printer % dp_ini clc
% initialize constants and assembly guesses d2r = pi / 180; R = [ 0 -1; 1 0 ]; f = [1; 0; 0]; g = [0; 1; 0]; h = [0; 0; 1];
% mechanism constants

s2pA = [0 0 0]'; s3pB = [0 0 0]'; s4pC = [0 0 0]'; s2pA = [0 0 0]'; s3pB = [0 0 0]'; s4pC = [0 0 0]'; s5pD = [-1 0 1.7321]'; s5pE = [-1 0 -1.7321]'; s5pF = [2 0 0]'; s5pP = [0 -1 0]';
r1A = [-6 17.321 10.3926]'; r1B = [-6 17.321 -10.3926]'; r1C = [12 17.321 0]';
r1Askew = [0 -r1A(3) r1A(2); r1A(3) 0 -r1A(1); -r1A(2) r1A(1) 0]; r1Bskew = [0 -r1B(3) r1B(2); r1B(3) 0 -r1B(1); -r1B(2) r1B(1) 0]; r1Cskew = [0 -r1C(3) r1C(2); r1C(3) 0 -r1C(1); -r1C(2) r1C(1) 0]; s2pAskew = [0 -s2pA(3) s2pA(2); s2pA(3) 0 -s2pA(1); -s2pA(2) s2pA(1) 0]; s3pBskew = [0 -s3pB(3) s3pB(2); s3pB(3) 0 -s3pB(1); -s3pB(2) s3pB(1) 0]; s4pCskew = [0 -s4pC(3) s4pC(2); s4pC(3) 0 -s4pC(1); -s4pC(2) s4pC(1) 0]; s5pDskew = [0 -s5pD(3) s5pD(2); s5pD(3) 0 -s5pD(1); -s5pD(2) s5pD(1) 0]; s5pEskew = [0 -s5pE(3) s5pE(2); s5pE(3) 0 -s5pE(1); -s5pE(2) s5pE(1) 0]; s5pFskew = [0 -s5pF(3) s5pF(2); s5pF(3) 0 -s5pF(1); -s5pF(2) s5pF(1) 0]; s5pPskew = [0 -s5pP(3) s5pP(2); s5pP(3) 0 -s5pP(1); -s5pP(2) s5pP(1) 0];
L = 20;
% initial guesses - angles measured by protractor chi2 = 0*d2r; chi3 = 0*d2r; chi4 = 0*d2r;
%r2 p2 q(1,1) = -6; q(2,1) = 17.321; q(3,1) = 10.3926; q(4,1) = 1; q(5,1) = 0; q(6,1) = 0; q(7,1) = 0;
%r3 p3 q(8,1) = -6; q(9,1) = 17.321; q(10,1) = -10.3926; q(11,1) = 1; q(12,1) = 0; q(13,1) = 0; q(14,1) = 0;
%r4 p4 q(15,1) = 12; q(16,1) = 17.321;

q(17,1) = 0; q(18,1) = 1; q(19,1) = 0; q(20,1) = 0; q(21,1) = 0;
%r5 p5 q(22,1) = 0; q(23,1) = 0; q(24,1) = 0; q(25,1) = 1; q(26,1) = 0; q(27,1) = 0; q(28,1) = 0;
% driver t = 0; % forward kinematics y2_start = 17.321; y3_start = 17.321; y4_start = 17.321; v2 = 0.01; v3 = 0; v4 = 0; % inverse kinematics xP_start = 0; yP_start = -1; zP_start = 0; vxp = 0; vyp = 0; vzp = 0;

% dp_phi_f
% Forward Kinematics % evaluate constraints and Jacobian for crank driving constraint r1 = [0 0 0]'; p1 = [1 0 0 0]'; r2 = q(1:3); p2 = q(4:7); r3 = q(8:10); p3 = q(11:14); r4 = q(15:17); p4 = q(18:21); r5 = q(22:24); p5 = q(25:28);
A1 = eye(3); A2 = 2*[ p2(1)^2+p2(2)^2-1/2 p2(2)*p2(3)-p2(1)*p2(4) p2(2)*p2(4)+p2(1)*p2(3); p2(2)*p2(3)+p2(1)*p2(4) p2(1)^2+p2(3)^2-1/2 p2(3)*p2(4)-p2(1)*p2(2); p2(2)*p2(4)-p2(1)*p2(3) p2(3)*p2(4)+p2(1)*p2(2) p2(1)^2+p2(4)^2-1/2]; A3 = 2*[ p3(1)^2+p3(2)^2-1/2 p3(2)*p3(3)-p3(1)*p3(4) p3(2)*p3(4)+p3(1)*p3(3); p3(2)*p3(3)+p3(1)*p3(4) p3(1)^2+p3(3)^2-1/2 p3(3)*p3(4)-p3(1)*p3(2); p3(2)*p3(4)-p3(1)*p3(3) p3(3)*p3(4)+p3(1)*p3(2) p3(1)^2+p3(4)^2-1/2]; A4 = 2*[ p4(1)^2+p4(2)^2-1/2 p4(2)*p4(3)-p4(1)*p4(4) p4(2)*p4(4)+p4(1)*p4(3); p4(2)*p4(3)+p4(1)*p4(4) p4(1)^2+p4(3)^2-1/2 p4(3)*p4(4)-p4(1)*p4(2); p4(2)*p4(4)-p4(1)*p4(3) p4(3)*p4(4)+p4(1)*p4(2) p4(1)^2+p4(4)^2-1/2]; A5 = 2*[ p5(1)^2+p5(2)^2-1/2 p5(2)*p5(3)-p5(1)*p5(4) p5(2)*p5(4)+p5(1)*p5(3); p5(2)*p5(3)+p5(1)*p5(4) p5(1)^2+p5(3)^2-1/2 p5(3)*p5(4)-p5(1)*p5(2); p5(2)*p5(4)-p5(1)*p5(3) p5(3)*p5(4)+p5(1)*p5(2) p5(1)^2+p5(4)^2-1/2];
f1 = f; g1 = g; h1 = h; f2 = A2*f; g2 = A2*g; h2 = A2*h; f3 = A3*f; g3 = A3*g; h3 = A3*h; f4 = A4*f; g4 = A4*g; h4 = A4*h; f5 = A5*f; g5 = A5*g; h5 = A5*h;
fpskew = [0 -f(3) f(2); f(3) 0 -f(1); -f(2) f(1) 0]; gpskew = [0 -g(3) g(2); g(3) 0 -g(1); -g(2) g(1) 0]; hpskew = [0 -h(3) h(2); h(3) 0 -h(1); -h(2) h(1) 0];
G2 = [-p2(2) p2(1) p2(4) -p2(3); -p2(3) -p2(4) p2(1) p2(2); -p2(4) p2(3) -
p2(2) p2(1)]; G3 = [-p3(2) p3(1) p3(4) -p3(3); -p3(3) -p3(4) p3(1) p3(2); -p3(4) p3(3) -
p3(2) p3(1)]; G4 = [-p4(2) p4(1) p4(4) -p4(3); -p4(3) -p4(4) p4(1) p4(2); -p4(4) p4(3) -
p4(2) p4(1)]; G5 = [-p5(2) p5(1) p5(4) -p5(3); -p5(3) -p5(4) p5(1) p5(2); -p5(4) p5(3) -

p5(2) p5(1)];
% global locations r2A = r2 + A2*s2pA; r3B = r3 + A3*s3pB; r4C = r4 + A4*s4pC; r5D = r5 + A5*s5pD; r5E = r5 + A5*s5pE; r5F = r5 + A5*s5pF; r5P = r5 + A5*s5pP;
dAA = r2A - r1A; dBB = r3B - r1B; dCC = r4C - r1C; dAD = r5D - r2A; dBE = r5E - r3B; dCF = r5F - r4C;
% drivers y2 = r2(2); y3 = r3(2); y4 = r4(2); xP = r5P(1); yP = r5P(2); zP = r5P(3);
% CONSTRAINT VECTOR PHI PHI = zeros(28,1);
% Joint A - Prismatic (5) PHI(1) = f'*g2; PHI(2) = h'*g2; PHI(3) = f'*dAA; PHI(4) = h'*dAA; PHI(5) = f'*h2;
% Joint B - Prismaticl (5) PHI(6) = f'*g3; PHI(7) = h'*g3; PHI(8) = f'*dBB; PHI(9) = h'*dBB; PHI(10) = f'*h3;
% Joint C - Prismaticl (5) PHI(11) = f'*g3; PHI(12) = h'*g3; PHI(13) = f'*dCC; PHI(14) = h'*dCC; PHI(15) = f'*h3;
% Joint AD - Double Spherical (1) PHI(16) = dAD'*dAD-L^2;
% Joint BE - Double Spherical (1) PHI(17) = dBE'*dBE-L^2;

% Joint CF - Double Spherical (1) PHI(18) = dCF'*dCF-L^2;
% Extra (3) PHI(19) = f'*g5; PHI(20) = h'*g5; PHI(21) = f'*h5;
% Euler Parameters (4) PHI(22) = p2'*p2-1; PHI(23) = p3'*p3-1; PHI(24) = p4'*p4-1; PHI(25) = p5'*p5-1;
% driving constraint (3) PHI(26) = y2 - y2_start - v2*t; PHI(27) = y3 - y3_start - v3*t; PHI(28) = y4 - y4_start - v4*t;
% JACOBIAN JAC = zeros(28,28); % Joint A - Prismatic (5) JAC(1,4:7) = -f'*A2*gpskew*G2; JAC(2,4:7) = -h'*A2*gpskew*G2; JAC(3,1:3) = f'; JAC(3,4:7) = -f'*A2*s2pAskew*G2; JAC(4,1:3) = h'; JAC(4,4:7) = -h'*A2*s2pAskew*G2; JAC(5,4:7) = -f'*A2*hpskew*G2;
% Joint B - Prismaticl (5) JAC(6,11:14) = -f'*A3*gpskew*G3; JAC(7,11:14) = -h'*A3*gpskew*G3; JAC(8,8:10) = f'; JAC(8,11:14) = -f'*A3*s3pBskew*G3; JAC(9,8:10) = h'; JAC(9,11:14) = -h'*A3*s3pBskew*G3; JAC(10,11:14) = -f'*A3*hpskew*G3;
% Joint C - Prismaticl (5) JAC(11,18:21) = -f'*A4*gpskew*G4; JAC(12,18:21) = -h'*A4*gpskew*G4; JAC(13,15:17) = f'; JAC(13,18:21) = -f'*A4*s4pCskew*G4; JAC(14,15:17) = h'; JAC(14,18:21) = -h'*A4*s4pCskew*G4; JAC(15,18:21) = -f'*A4*hpskew*G4;
% Joint AD - Double Spherical (1) JAC(16,1:3) = -2*dAD'; JAC(16,4:7) = 4*dAD'*A2*s2pAskew*G2; JAC(16,22:24) = 2*dAD'; JAC(16,25:28) = -4*dAD'*A5*s5pDskew*G5;

% Joint BE - Double Spherical (1) JAC(17,8:10) = -2*dBE'; JAC(17,11:14) = 4*dBE'*A3*s3pBskew*G3; JAC(17,22:24) = 2*dBE'; JAC(17,25:28) = -4*dBE'*A5*s5pEskew*G5;
% Joint CF - Double Spherical (1) JAC(18,15:17) = -2*dCF'; JAC(18,18:21) = 4*dCF'*A4*s4pCskew*G4; JAC(18,22:24) = 2*dCF'; JAC(18,25:28) = -4*dCF'*A5*s5pDskew*G5;
% Extra (3) JAC(19,25:28) = -f'*A5*gpskew*G5; JAC(20,25:28) = -h'*A5*gpskew*G5; JAC(21,25:28) = -f'*A5*hpskew*G5;
% Euler Parameters JAC(22,4:7) = 2*p2'; JAC(23,11:14) = 2*p3'; JAC(24,18:21) = 2*p4'; JAC(25,25:28) = 2*p5';
% driving constraint in Jacobian JAC(26,1:3) = [0 1 0]; JAC(27,8:10) = [0 1 0]; JAC(28,15:17) = [0 1 0];
% dp_kin_f % Newton-Raphson position solution assy_tol = 0.001; dp_phi_f; while max(abs(PHI)) > assy_tol q = q - inv(JAC) * PHI; max(abs(PHI)); dp_phi_f; end

Simulation of Quadruped Locomotion with Four-bars Structures
Final Report for ME581
Zexi Zhang
Abstract Bionic robots simulating the quadruped animals
have aroused great interests among professional people from different areas for their ability to pass through
various complex topographies which are unachievable by traditional wheeled vehicles. This paper focuses on
the simulation of the quadruped locomotion, movement
of the animals with four legs, with mechanical structures. With limited time and technology, I pick the
simple four-bars mechanism, which is a planar structure
made by four linked bars, to simulate the quadruped
locomotion. Two pairs of four-bars mechanisms are used
to form the entire model and represent the left set and right set of legs respectively. In each pair of four-bars
structure, there is one link serving as body, one link providing the driving torque and two links serving as
front and back legs respectively. I build up a Solidworks
model of the whole simulation mechanism to determine
the shape, size, material, mass and rotational moment of
inertia of each link, and to visualize the structure and the motion of the mechanism. And finally, all the
parameters are put into the Newton-Raphson iterative algorithm coded with Matlab to perform the forward
kinematic and dynamic simulations and determine the
positions and driving torques plots.
NOMENCLATURE 𝜑, Φ phi
λ lamda
1. INTRODUCTION For thousands of years, livestocks like horses and
donkeys have been helping humans transporting heavy
weights. Even for nowadays, in many rural places with
complex topography unachievable by vehicles, livestocks are
still the major weight carriers for people who have needs.
There was already a huge amount of calls for the reliable and
efficient weight carriers who can pass through different kinds
of complicated topographies and relief the animals and even
humans from these jobs. Bionic robots, such as Big Dog from
Boston Dynamic [1] which is a quadruped robot with the
ability to carry weight, pass through different landforms and
resist strikes, become one of the most popular choices to take
these positions. In this paper, I choose to simulate the
quadruped motion with the simple four-bars structures. The
animal simulated here is a horse who is able to carry the
comparable amount of weight, run fast and pass through
different topographies. The horse’s locomotion is a periodic movement of front and back legs moving towards each other
and always from each other. Its left set of legs and right set of
legs share the same periodic motion pattern, but have a time
lag between their movements, which means one set of legs is
always ahead of the other with a certain amount of time. Two
pairs of four-bars mechanisms will be utilized to simulate the
locomotion of the two sets of legs and also the time lag
between them.
2. STRUCTURE DESIGN The four links for the four-bars structure are designed
and assembled in the Solidworks. Their dimensions, masses,
rotational moment of inertia and all other parameters are
determined and recorded down to prepare for the kinematic
and dynamic simulations of the model’s locomotion.
2.1 Bars Dimension As shown in Figure 1, the top horizontal bar is link 1,
which simulates the body of the horse and keeps stationary
during the locomotion simulation. Link 1 has a length of 220
mm, and two holes with diameter 10 mm lie on its right and
left ends respectively. The shorter link is link2, the driving
link who provides all the torque to drive all other moving
links. It has a length of 30 mm and, two holes with diameter
10 mm lie on its top and bottom ends respectively. Link 3
stands vertically and serves as the back leg of the horse. It has
a total length of 160 mm and three holes with a diameter of
10mm lying on it. Two of the holes are on link 3’s top and
bottom ends respectively, one of them sits right in the middle
of it. Link4 has a near T shape with three tips. It has a
horizontal length of 200mm and a vertical length of 200mm as
well. There are also three holes with a diameter of 10mm
sitting on each tip of the link 4. All the links have the
thickness of 10 mm and the width of 20 mm.
FIGURE 1. TWO PAIRS OF THE FOUR-BARS STRUCTURE
Link 1 Link 2
Link 3
Link 4

2.2 Mass and Rotational Moment of Inertia
All the links are built up in Solidworks with
Aluminum Alloy 6061, which has a density of 2700kg/m3.
Then I calculated their masses, rotational moment of inertia
and positions of centroid with Solidworks, and the results are
presented in Table 1.
TABLE 1. MASS AND ROTATIONAL MOMENT OF INERTIA
Mass (g) Rotational
Moment of Inertia
(kg*mm2)
Link 2 20.44 4.16
Link 3 88.52 220.45
Link 4 211.88 1289.02
2.3 Assemblies
All four links are then assembled in the Solidworks to
form a four-bars structure, which is demonstrated in Figure 1
and 2. Link 1 is fixed in the space, and link 2 and link 4 are
put on top of link1 and connected to it through point A and D
respectively. The bottom hole on link4, point Q, is connected
to nothing but serves as the front foot of the horse. Link 3 is
then put on top of the link 2 and 4 and connected to them
through point B and C respectively. And its bottom hole, point
P represents the back foot of the horse. Pins are inserted into
those holes to restrict the relative positions of the four links.
Then I assemble two pairs of this four-bars structure with their
link 1s parallel and 100mm away from each other, which then
simulate the left and right sets of horse legs. Their link 2s are
both driven at 60 RPM in a clockwise direction with a phase
lag of 120 degrees to demonstrate the time lag between the left
and right legs of a real horse. Finally, I set up a Solidworks
motion study and use the animation to visualize the actual
locomotion of my simulation model.
FIGURE 2. MODEL ASSEMBLY
3. SIMULATION METHODOLOGY After the visualization of the simulation model
locomotion, I need to perform the kinematic and dynamic
simulation to determine the exact positions of point Q and P,
and the torque required to drive the model. Several
coordinates are set up, and the positions, masses and moment
of inertia are put into the Newton-Raphson iterative algorithm
to perform the simulations.
3.1 Coordinates and Positions
I set up a global coordinate, r0, and three local
coordinates, r2, r3 and r4, on link 2, 3 and 4 respectively. As
presented in Figure 3, global coordinate, r0, sits right on point
A with its x axis parallel to link 1. The local coordinates for
link 2 and link 3 sit on their centroids with the x axes parallel
to their own links. The local coordinate r4 also stays at the
centroid of link4 and its x axis is parallel to line CD. With all
the coordinate systems set up, I’m able to determine the
positions of coordinate r2, r3 and r4 relative to the general
coordinates and also the positions of point A, B, C, D, P and Q
relative to the local coordinates. All the results are then shown
in Table 2. The first row includes the local coordinates and
their location relative to the global coordinate, and all other
row presents the locations of points relative to local
coordinates.
TABLE 2. COORDINATES AND POSITIONS
r2(-0.75, -1.299)
(mm)
r3(-5.5, -9.526)
(mm)
r4(-17.142, -11.61)
(mm)
A (-1.5,0)
B (1.5,0) (-8,0)
C (0,0) (12.493, 6.886)
D (-10.072, 7.384)
P (8,0)
Q (-0.629, -9.538)
FIGURE 3. GLOBAL AND LOCAL COORDINATES
A B
C
D
Q
P
r0
x0
y0
r2
r3
r4
x2
x3
x4
y4
y3
y2

3.2 Kinematic Simulation All these values from table two are put into the
Newton-Raphson iterative algorithm coded with Matlab, and
the initial angle of link 2, 3 and 4 are set to
𝜑2 = −120𝑜 , 𝜑3 = −120𝑜 , 𝜑4 = −30𝑜 . The equation 1 shows the vector p with all the positional
parameters. And the equation 2 presents the vector Φ, which
includes the position constraints that drive this mechanism.
The 𝜑2𝑠𝑡𝑎𝑟𝑡 is the initial value of link 2 angle and the w2 is 60
RPM, which is the speed link 2 is driven at.
𝑞 =
[ {𝑟2}𝜑2
{𝑟3}𝜑3
{𝑟4}𝜑4 ]
(1)
Φ =
[
{𝑟2}𝐴 − {𝑟1}
𝐴
{𝑟3}𝐵 − {𝑟2}
𝐵
{𝑟4}𝐶 − {𝑟3}
𝐶
{𝑟4}𝐷 − {𝑟1}
𝐷
𝜑2 − 𝜑2𝑠𝑡𝑎𝑟𝑡 − 𝑤2𝑡]
= 0 (2)
Then the initial position parameters and constrains
will be plugged into equation 3, the Newton-Raphson position
equation, for multiple iterative to derive the accurate positions
of point Q, front leg, and point P, back leg. The Φq in equation
3 is the 9 X 9 Jacobian matrix, which is defined as 𝑑Φ
𝑑𝑞.
{𝑞}𝑘+1 = {𝑞}𝑘 − {Φ}q−1{Φ}k (3)
3.3 Dynamic Simulation
After the kinematic simulation, a dynamic simulation
is performed to determine the internal constrain forces
between the links and the driven torque with equation 4 added
to the Newton-Rapthon iterative. In the equation 4, [M] is the
matrix contains all the mass and moment of inertia
information, {Q}a matrix includes all the external forces and
the {λ} contains all the constrain forces and driven torque,
which is the last row of {λ}.
[𝑀]{�̈�} + [ Φq]𝑇{λ} = {Q}a
{λ} = ([ Φq]𝑇)−1
({𝑄}𝑎 − [𝑀]{�̈�}) (4)
4. RESULTS 4.1 Positions Simulation
After the kinematic and dynamic simulation, I get the
plots for positions and the torques. Figure 4 demonstrates the
positions of the point P and Q. The point Q moves back and
forth on the left track, and the point P moves circularly on the
right track. They will move towards each other first and then
away from each other, which is exactly expected to simulate
the locomotion of horses. Once two pairs of the four-bars
structure are put together, the model will be able to simulate
all the four legs of the horse.
FIGURE 4. POINT Q AND POINT P POSITIONS PLOT
4.2 Torque Simulation
Figure 5 shows the torque applied to link 2 to drive
the mechanism at 60 RPM. The torque decreases at first, has
its direction reversed when 𝜑2 is around 100 degrees and
increases again. When its absolute value reaches the
maximum, it drops and has its direction reversed again when
𝜑2 is around 260 degrees. And finally, the torque increases
again and reaches the maximum at 𝜑2= 330 degrees. This
dynamic simulation is based on the masses and inertia I got
from Solidworks, which are not fully reliable. It just provides
some reference data for me if I am going to build the model in real and choose the motor for the mechanism. The accurate
driven torque requires solid model and actual measurement of
it in the future.

FIGURE 5. TORQUE VS. PHI 2
5. Conclusions
The locomotion of the horse is simulated with two
four-bars structures driven at 60 RPM with a phase lag
between them. With all the design, dimensions and
parameters, I’m able to visualize the movement, kinematically
and dynamically simulate the mechanism and plot the
positions and torques. The point Q (front leg) and point P
(back leg) moves towards each other and then away from each
other, which is as expected. The driven torque changes
periodically with the link 2 angle. This simulation
demonstrates some basic and straightforward understandings
of the quadruped locomotion. And I hope the design of the
mechanism and the results from simulation will provide some
useful information to the future researchers who are interested
in quadruped bionic robots.
REFERENCE
[1] "BIG DOG," 2 May 2019. [Online]. Available: https://www.bostondynamics.com/bigdog.