me555 final report optimization of parallel braking...
TRANSCRIPT
1
ME555 Final Report
Optimization of Parallel Braking System
April 22, 2016
Team 2
Anqi Sun
Luqin Sun
Instructors
Alparslan Bayrak
Alex Burnap
Namwoo Kang

2
Subsystem 1: Regenerative Braking System (Luqin Sun)
Background
Regenerative braking is an energy recovery mechanism for electric vehicles (EVs)
where kinetic energy can be converted into electric energy and stored for re-use in
subsequent acceleration. In comparison, conventional friction braking dissipates kinetic
energy into atmosphere in the form of heat. However, despite all the advantages of
regenerative braking, it must be employed along with conventional braking. The reason
is threefold. Such braking strategy ensures enough braking force, enhances fuel
economy in heavy traffic and urban areas, as well as extends life cycle of braking
system. [2-6]
The team aims to maximize the electric power recuperated by the motor generator (MG).
To achieve this goal, a regenerative torque distribution (RTD) strategy is proposed to
maximize the usage of regenerative braking. Based on that, a regenerative torque
optimization (RTO) is implemented to maximize the recovered electric power.
Mathematical Model
Design Variables
There are three design variables to define the objective function, the definition, type,
unit, and upper and lower bounds are summarized in Table 1.1 below.
Table 1.1: Design Variables
Design
Variable Definition Type Unit
Upper and Lower
Bound
𝑇𝑚 Output torque of MG Discrete 𝑁𝑚 [0,600]
𝜔𝑚 Output speed of MG Discrete 𝑅𝑃𝑀 [0,5000]
𝑖 CVT ratio Continuous / [0.5,10]
Among the three design variables, both 𝑇𝑚 and 𝜔𝑚 are linked with subsystem 2, the
disk braking system, because they are used to calculate the regenerative braking torque
which is an input to the final system optimization.
Objective Function
The objective is to maximize the MG recuperated power from regenerative braking,
which is equivalent to minimize the negative value of the recuperated power. To obtain
the objective function, RTO is employed, represented in the flow chart in Figure 1.1
below:

3
z
T_d ≤ T_m_avail
T_reg = T_d T_reg = T_m_avail
T_mP_reg
Yes No
Figure 1.1: Flow chart of RTD which maximizes the usage of regenerative braking.
where z is the specific braking rate that acts as the input to the system, Td is the total
demand torque for the braking, Tm_avail is the available braking torque that can be
provided by the MG after CVT, Treg is the actual regenerative torque, Tm is the
actual braking torque at MG output shaft, and finally Preg is the regenerative power
which is the objective function of the system.
The flow chart is under the assumption that friction braking is able to generate as much
torque as necessary to account for the portion that regenerative braking fails to provide
due to its limitation on Tm_avail. While in real application, the friction braking torque
will have an upper limit depending on vehicle geometry and z. But since it falls out of
the scope of this project, it is neglected for simplicity. The basic idea of RTD is to first
compute the Td for a specific z using Equation 1.1, and then compare the value of
Td to Tm_avail, which can be written in Equation 1.2. If Td is less than Tm_avail, the
regenerative braking alone can provide enough braking torque, and thus all the braking
will be done by regenerative brake. If otherwise, the regenerative braking will provide
its maximum available torque and the amount exceeds this limit will be taken care of
by friction braking. The objective function, see Equation 1.3, is calculated based on
actual MG torque.
Td = 𝐺𝑧𝑟 Equation 1.1
Tm_avail =𝑇𝑚𝑖
𝜂𝑡 Equation 1.2
Preg = Tm𝜔𝑚𝜂𝑚 Equation 1.3
where G = 13450 N is vehicle weight, r = 0.282 m is tire radius, ηt = 0.9 is

4
transmission efficiency, and ηm is MG efficiency, which is a function of Tm and ωm
and will be discussed in detail in the following sections.
Constraints
Currently only one constraint is applied. That is, 𝑃𝑒𝑛𝑔 should be less than the
maximum MG power (𝑃𝑚𝑎𝑥), also shown in Equation 1.4 below. 𝑃𝑚𝑎𝑥 is a constant
value for a specific MG.
𝑃𝑟𝑒𝑔 ≤ 𝑃𝑚𝑎𝑥 = 66 𝑘𝑊 Equation 1.4
Full Factorial Sampling of 𝜼𝒎
Unlike other parameters that can be represented using analytical equations, 𝜂𝑚 has a
nonlinear relationship with respect to 𝑇𝑚 and 𝜔𝑚 , and is obtained through full
factorial sampling. Since the design space is not too large, computational cost is
negligible.
First, experiment data of the MG is conducted along the test path, which is highlighted
with red arrows in Figure 1.2. The test data is adopted from Professor Hui Peng’s course
pack, consisting of MG torque (𝑇𝑚), MG speed (𝜔𝑚), MG voltage (𝑉), as well as MG
current (𝐼). Using Equation 1.5, MG efficiency map along test path can be computed.
The output at this step is the MG efficiency map along test path, shown in Figure 1.2.
Figure 1.2: MG efficiency computed from test data, where the red arrows indicating

5
the test path.
𝜂𝑚 =𝑈𝐼
𝑇𝑚𝜔𝑚 Equation 1.5
Secondly, full factorial sampling is employed to obtain 𝜂𝑚 throughout the span of 𝑇𝑚
and 𝜔𝑚. The variable 𝑇𝑚 ranges from 0 to 600 𝑁𝑚 with an increment of 1 𝑁𝑚; and
the variable 𝜔𝑚 ranges from 0 to 5000 𝑅𝑃𝑀 at an increment of 10 𝑅𝑃𝑀. Once the
grid is constructed, the MG efficiency can be sampled utilizing cubic interpolation from
the test data. The results is shown by a contour plot as in Figure 1.3. Note that in Figure
1.2 and 1.3, the MG torque is negative, meaning that the MG is generating electric
power; while for the optimization problem, the MG torque is defined as a positive value
to represent the absolute amount of the MG torque.
Figure 1.3: MG efficiency after full factorial sampling and cubic interpolation.
Using this approach, the number of samples obtained is 306111, which can be
calculated by Equation 1.6. As mentioned before, such computational cost is affordable
for this specific problem.
𝑘 = ∏ 𝑀𝑖
2
𝑖=1
= 611 𝑥 501 = 306111 Equation 1.6

6
Optimization Method & Results
Method and Algorithm
Two out of the three design variables are discrete, therefore this is a mixed integer linear
problem and this RTO problem is solved using genetic algorithm (GA) in MATLAB.
Since MATLAB GA solver requires negative null form, the optimization problem is
formulated as the following:
Minimize 𝑓(𝒙) = −𝑃𝑟𝑒𝑔(𝑥1, 𝑥2, 𝑥3)
Subject to 𝑔1(𝒙) = 𝑔1(𝑥1, 𝑥2, 𝑥3) ≤ 0
where 𝑓(𝒙) is the negative maximum regenerating power, 𝑔1(𝒙) is a nonlinear
inequality constraint, and 𝑥 = (𝑥1, 𝑥2, 𝑥3) = (𝑇𝑚, 𝜔𝑚, 𝑖) is a row vector of
design variables. Within GA, a few computation constants are utilized as listed in Table
1.2 below. The crossover and mutation are default values. Population size and
maximum generation are to the larger side to get as close to global optimum as possible.
Table 1.2: GA Computation Parameters
Crossover Rate 0.8 Population Size 100
Mutation Rate 0.01 Maximum Generation 100
Results and Validation
The initial condition is randomly chosen to be 𝒙0 = (200,2000,5), where the motor
is 200 𝑁𝑚, motor speed is 2000 𝑅𝑃𝑀, and CVT ratio is 5.
As mentioned before, 𝑧 is an input to the system, which is a constant that ranges from
0.15 to 0.8 at an increment of 0.05. [2] Therefore, optimization is performed at each 𝑧
within the range and the results with respect to each individual 𝑧 is tabulated in Table
1.3 below.
We can see that for all 𝑧 values, the maximum 𝑃𝑟𝑒𝑔 is slightly below 66 𝑘𝑊, which is
our constraint value for 𝑃𝑟𝑒𝑔. Therefore, the constraint is active and the regenerating
torque distribution agrees with the RTD scenario previously defined.
Another generic observation is that, for different 𝑧 values, the actual generation
computed is about 50, much smaller than the 100 maximum generation specified. A
sample convergence plot is shown in Figure 1.4. And based on the iterative output
message, at about the 50th generation, the optimization is terminated because the
constraint violation is less than its tolerance. So for future stage, the GA computational
constants, GA tolerance, etc. will be tuned for better performance.

7
Table 1.3: Initial Results from GA at 𝒙0 = (200,2000,5)
Figure 1.4: Sample convergence plot at 𝑧 = 0.8. GA converges rapidly at the first
ten generations, and finally approaches the minimum within 60 generations.
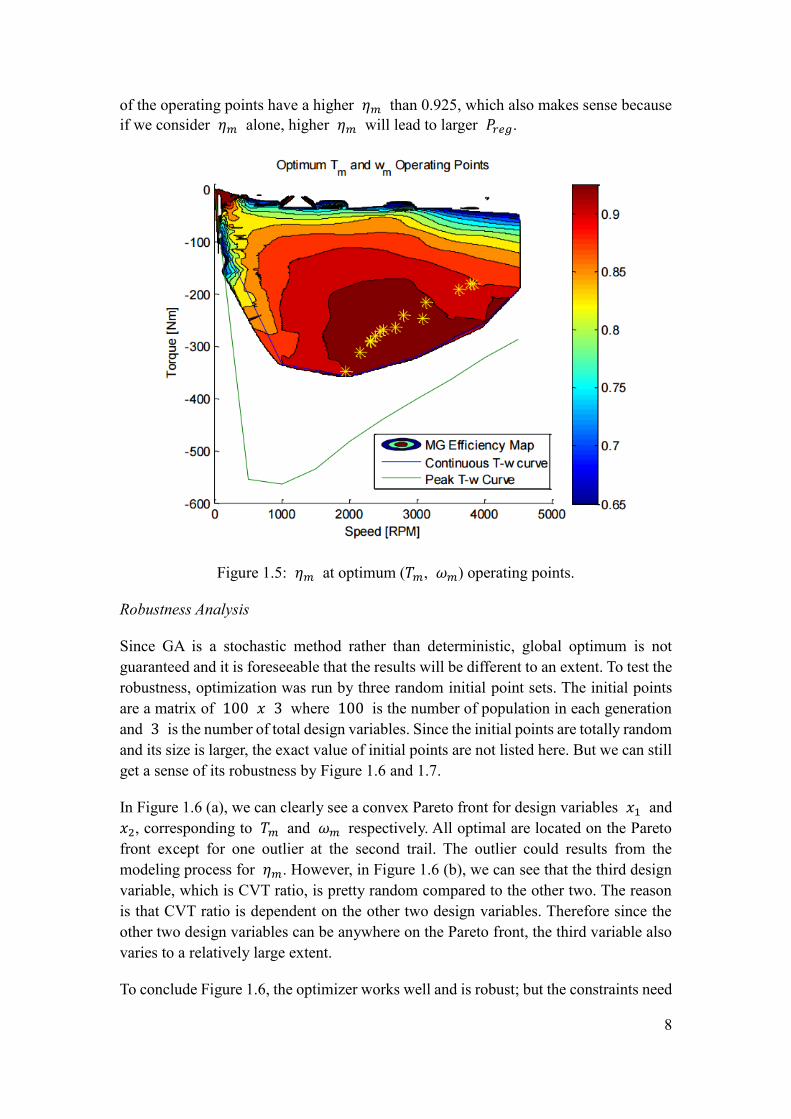
To study the effect of the optimum 𝑇𝑚 and 𝜔𝑚 operating points on 𝜂𝑚, the operating
points are overlaid onto the MG efficiency map in Figure 1.5. It can be seen that most
8
of the operating points have a higher 𝜂𝑚 than 0.925, which also makes sense because
if we consider 𝜂𝑚 alone, higher 𝜂𝑚 will lead to larger 𝑃𝑟𝑒𝑔.
Figure 1.5: 𝜂𝑚 at optimum (𝑇𝑚, 𝜔𝑚) operating points.
Robustness Analysis
Since GA is a stochastic method rather than deterministic, global optimum is not
guaranteed and it is foreseeable that the results will be different to an extent. To test the
robustness, optimization was run by three random initial point sets. The initial points
are a matrix of 100 𝑥 3 where 100 is the number of population in each generation
and 3 is the number of total design variables. Since the initial points are totally random
and its size is larger, the exact value of initial points are not listed here. But we can still
get a sense of its robustness by Figure 1.6 and 1.7.
In Figure 1.6 (a), we can clearly see a convex Pareto front for design variables 𝑥1 and
𝑥2, corresponding to 𝑇𝑚 and 𝜔𝑚 respectively. All optimal are located on the Pareto
front except for one outlier at the second trail. The outlier could results from the
modeling process for 𝜂𝑚. However, in Figure 1.6 (b), we can see that the third design
variable, which is CVT ratio, is pretty random compared to the other two. The reason
is that CVT ratio is dependent on the other two design variables. Therefore since the
other two design variables can be anywhere on the Pareto front, the third variable also
varies to a relatively large extent.
To conclude Figure 1.6, the optimizer works well and is robust; but the constraints need

9
to be defined better such that only one combination on the Pareto front is achieved.
(a)
(b)
Pareto Front
Outlier
10
Figure 1.6: Optimum design variables 𝒙∗ = (𝑇𝑚, 𝜔𝑚, 𝑖) for fourteen 𝑧’s at three
random initial point sets.
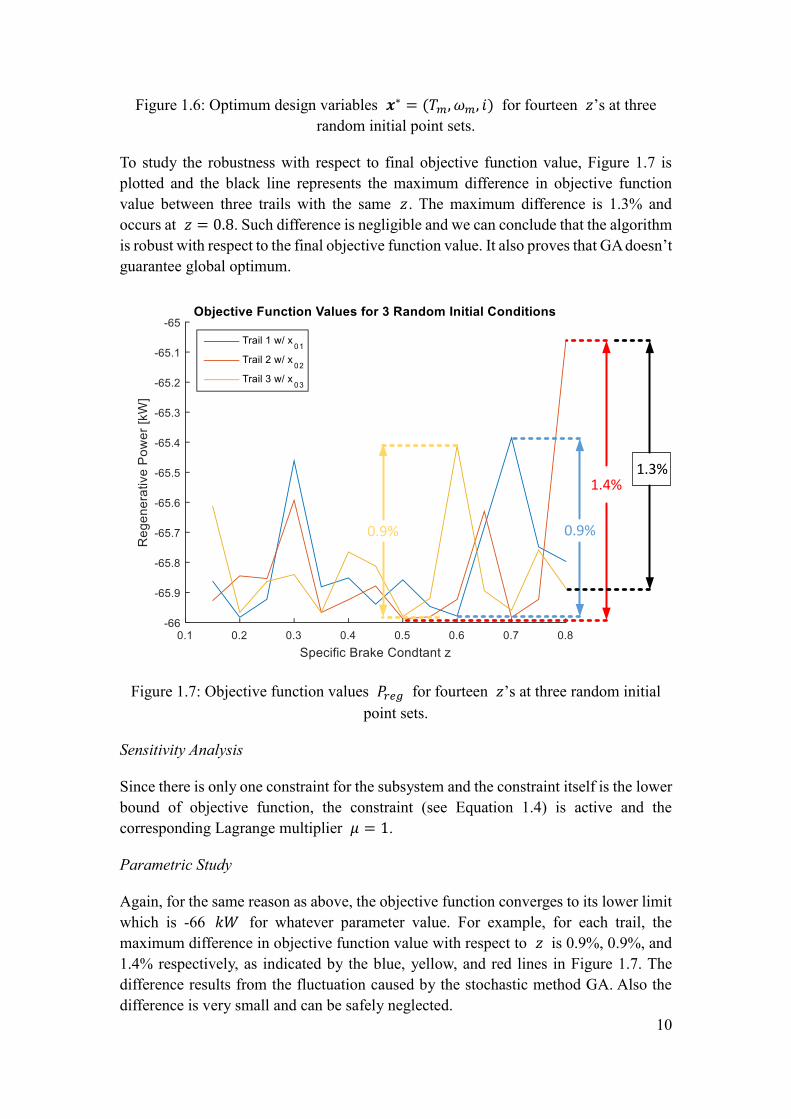
To study the robustness with respect to final objective function value, Figure 1.7 is
plotted and the black line represents the maximum difference in objective function
value between three trails with the same 𝑧 . The maximum difference is 1.3 and
occurs at 𝑧 = 0.8. Such difference is negligible and we can conclude that the algorithm
is robust with respect to the final objective function value. It also proves that GA doesn’t
guarantee global optimum.
0.9%0.9%
1.4%1.3%
Figure 1.7: Objective function values 𝑃𝑟𝑒𝑔 for fourteen 𝑧’s at three random initial
point sets.
Sensitivity Analysis
Since there is only one constraint for the subsystem and the constraint itself is the lower
bound of objective function, the constraint (see Equation 1.4) is active and the
corresponding Lagrange multiplier 𝜇 = 1.
Parametric Study
Again, for the same reason as above, the objective function converges to its lower limit
which is -66 𝑘𝑊 for whatever parameter value. For example, for each trail, the
maximum difference in objective function value with respect to 𝑧 is 0.9 , 0.9 , and
1.4 respectively, as indicated by the blue, yellow, and red lines in Figure 1.7. The
difference results from the fluctuation caused by the stochastic method GA. Also the
difference is very small and can be safely neglected.

11
However, through our analysis, we found that the coupling variable 𝑇𝐷𝐵 is very
sensitive with regard to parameter value. So a parametric study is done on the coupling
variable. The results is summarized in Table 1.4 below.
Table 1.4: Summary of Parametric Study on Coupling Variable 𝑇𝐷𝐵
By varying each parameter value up and down by 30 of its original value, Table
1.4 shows that vehicle weight and tire radius are equally important and transmission
efficiency almost has no effect on coupling variable. As a result, if vehicle weight was
lower (equivalent to lower total braking torque demand) and tires were larger
(equivalent to larger braking torque moment arm), the minimum required torque on the
disk brake 𝑇𝐷𝐵, which is the coupling variable to the second subsystem, can be made
smaller.
12
Subsystem 2: Disc Braking System (Anqi Sun)
Background
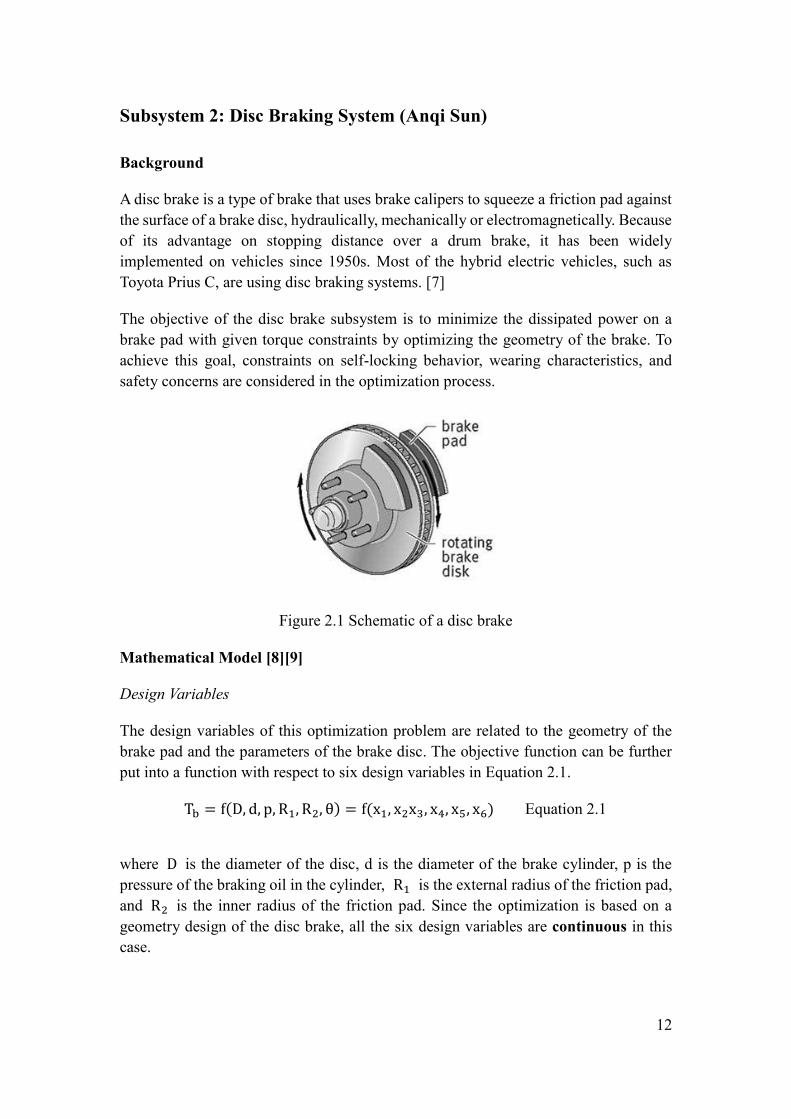
A disc brake is a type of brake that uses brake calipers to squeeze a friction pad against
the surface of a brake disc, hydraulically, mechanically or electromagnetically. Because
of its advantage on stopping distance over a drum brake, it has been widely
implemented on vehicles since 1950s. Most of the hybrid electric vehicles, such as
Toyota Prius C, are using disc braking systems. [7]
The objective of the disc brake subsystem is to minimize the dissipated power on a
brake pad with given torque constraints by optimizing the geometry of the brake. To
achieve this goal, constraints on self-locking behavior, wearing characteristics, and
safety concerns are considered in the optimization process.
Figure 2.1 Schematic of a disc brake
Mathematical Model [8][9]
Design Variables
The design variables of this optimization problem are related to the geometry of the
brake pad and the parameters of the brake disc. The objective function can be further
put into a function with respect to six design variables in Equation 2.1.
Tb = f(D, d, p, R1, R2, θ) = f(x1, x2x3, x4, x5, x6) Equation 2.1
where D is the diameter of the disc, d is the diameter of the brake cylinder, p is the
pressure of the braking oil in the cylinder, R1 is the external radius of the friction pad,
and R2 is the inner radius of the friction pad. Since the optimization is based on a
geometry design of the disc brake, all the six design variables are continuous in this
case.
13
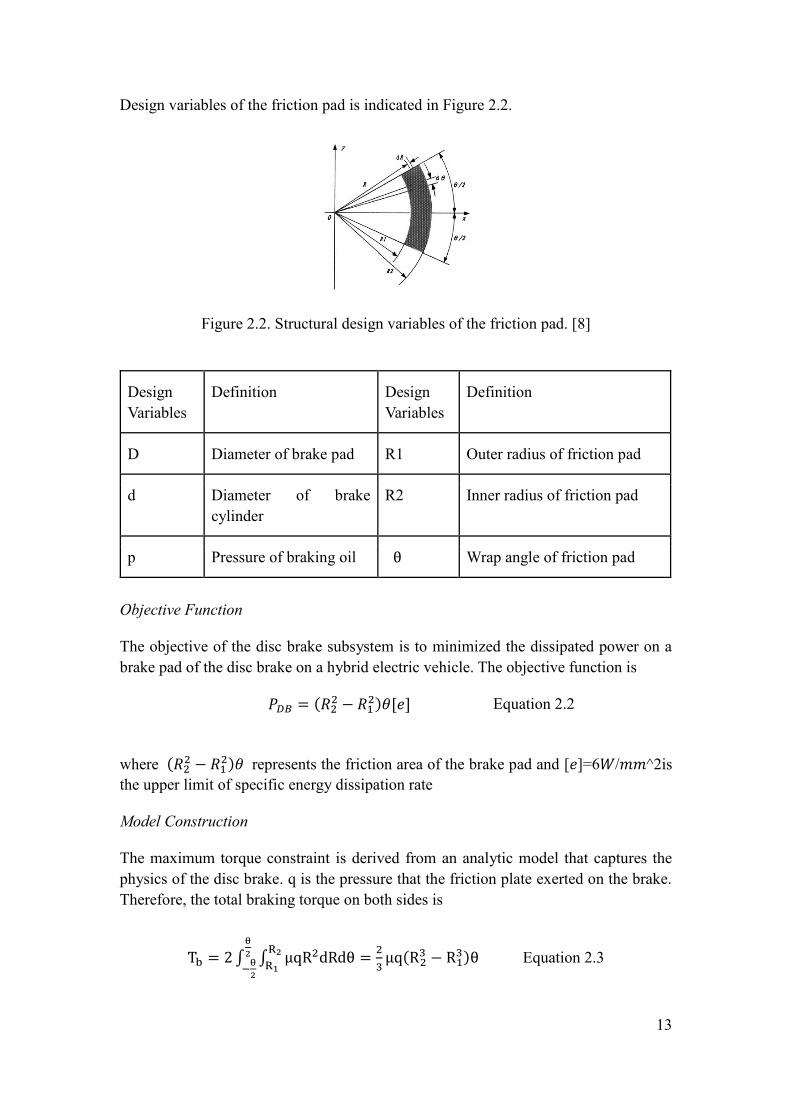
Design variables of the friction pad is indicated in Figure 2.2.
Figure 2.2. Structural design variables of the friction pad. [8]
Design
Variables
Definition Design
Variables
Definition
D Diameter of brake pad R1 Outer radius of friction pad
d Diameter of brake
cylinder
R2 Inner radius of friction pad
p Pressure of braking oil θ Wrap angle of friction pad
Objective Function
The objective of the disc brake subsystem is to minimized the dissipated power on a
brake pad of the disc brake on a hybrid electric vehicle. The objective function is
𝑃𝐷𝐵 = (𝑅22 − 𝑅1
2)𝜃[𝑒]
Equation 2.2
where (𝑅22 − 𝑅1
2)𝜃 represents the friction area of the brake pad and [𝑒]=6𝑊/𝑚𝑚^2is
the upper limit of specific energy dissipation rate
Model Construction
The maximum torque constraint is derived from an analytic model that captures the
physics of the disc brake. q is the pressure that the friction plate exerted on the brake.
Therefore, the total braking torque on both sides is
Tb = 2 ∫ ∫ μqR2dRdθ =2
3μq(R2
3 − R13)θ
R2
R1
θ
2
−θ
2
Equation 2.3

14
According to the hydraulic rules, the unit pressure q is scaled from the pressure of oil
in the cylinder p, which is an inverse of the ratio of the action area. It can be
formulated as the inverse of
q =1
4πd2
1
2(R2
2−R12)θ
p =1
2πd2
(R22−R1
2)θp Equation 2.4
Substitute Equation 10 to Equation 9, we can conclude the objective function in
Equation 8. The design variable θ is canceled in the objective function.
Constraints
The optimization of the disc brake design is constrained by the following rules. All
constant parameters used in the model are listed in Table 2.1.
(1) Braking torque constraint: The requirement of the braking torque is determined
by the control logic of Regenerative Braking System. Based on different braking
conditions (z), the braking torque required from the mechanical disc brake
varies. For a subsystem level problem, TDBL = 2700Nm is used and a safety
factor of SF = 1.5 is multiplied to the limit.
2
3nμq(R2
3 − R13)θ ≥ TDBL ⋅ SF Equation 2.5
(2) Self-locking constraints: To avoid self-locking, the following constraint should
be satisfied:
μTf ≤1
2μLGβr
Equation
2.6
(3) Constraint of maximum pressure on the friction pad: This constraint is to
guarantee the lifetime of the disc brake.
β1Re
R1⋅
πd2
4A1p < [P]
Equation 2.7
Where β1 =4R1R2
(𝑅1+𝑅2)𝑅𝑒+2𝑅1𝑅2 , R𝑒 =
2
3(𝑅2
3−𝑅13)
𝑅22−𝑅1
2 , 𝐴1 =𝜃(𝑅2
2−𝑅12)
2
(4) Constraint of wearing characteristic
1
2⋅
mv12
2tA1≤
1
2μLGβr
Equation 2.8
15
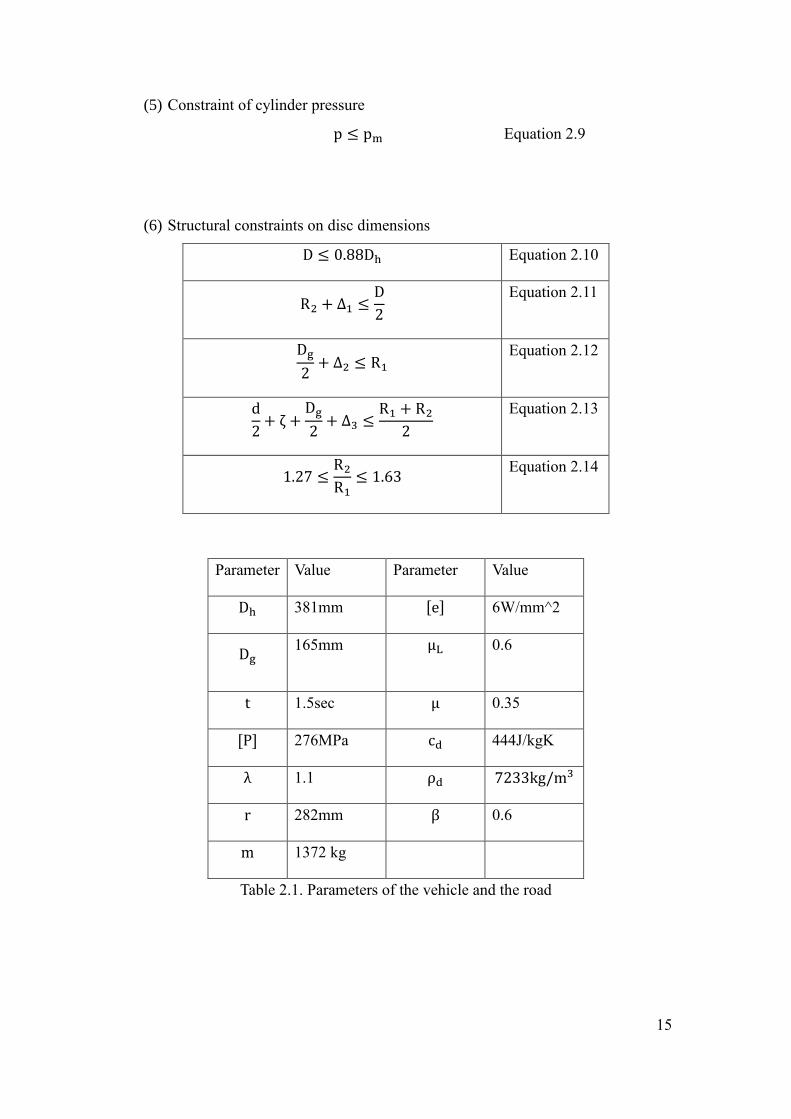
(5) Constraint of cylinder pressure
p ≤ pm Equation 2.9
(6) Structural constraints on disc dimensions
D ≤ 0.88Dh Equation 2.10
R2 + Δ1 ≤D
2
Equation 2.11
Dg
2+ Δ2 ≤ R1
Equation 2.12
d
2+ ζ +
Dg
2+ Δ3 ≤
R1 + R2
2
Equation 2.13
1.27 ≤R2
R1≤ 1.63
Equation 2.14
Parameter Value Parameter Value
Dh 381mm [e] 6W/mm^2
Dg 165mm μL 0.6
t 1.5sec μ 0.35
[P] 276MPa cd 444J/kgK
λ 1.1 ρd 7233kg/m3
r 282mm β 0.6
m 1372 kg
Table 2.1. Parameters of the vehicle and the road
16
Optimization Results & Post Analysis
The formulation above is a nonlinear continuous constrained problem. To use the built
in fmincon in the MATLAB optimization tool box, the problem is formulated as
Minimize f(𝐱)
Subject to 𝐀𝐱 ≤ 𝐛
𝐡(𝐱) ≤ 𝟎
where f(x) is the negative maximum torque, 𝐀𝐱 ≤ 𝐛 are linear constraints and h(x)
are nonlinear constraints.
In this section, optimizations are based on the following initial conditions.
𝐱𝐨 = [𝟐𝟎𝟎 𝟓𝟎 𝟑 𝟔𝟎 𝟏𝟏𝟎 𝟎. 𝟖]
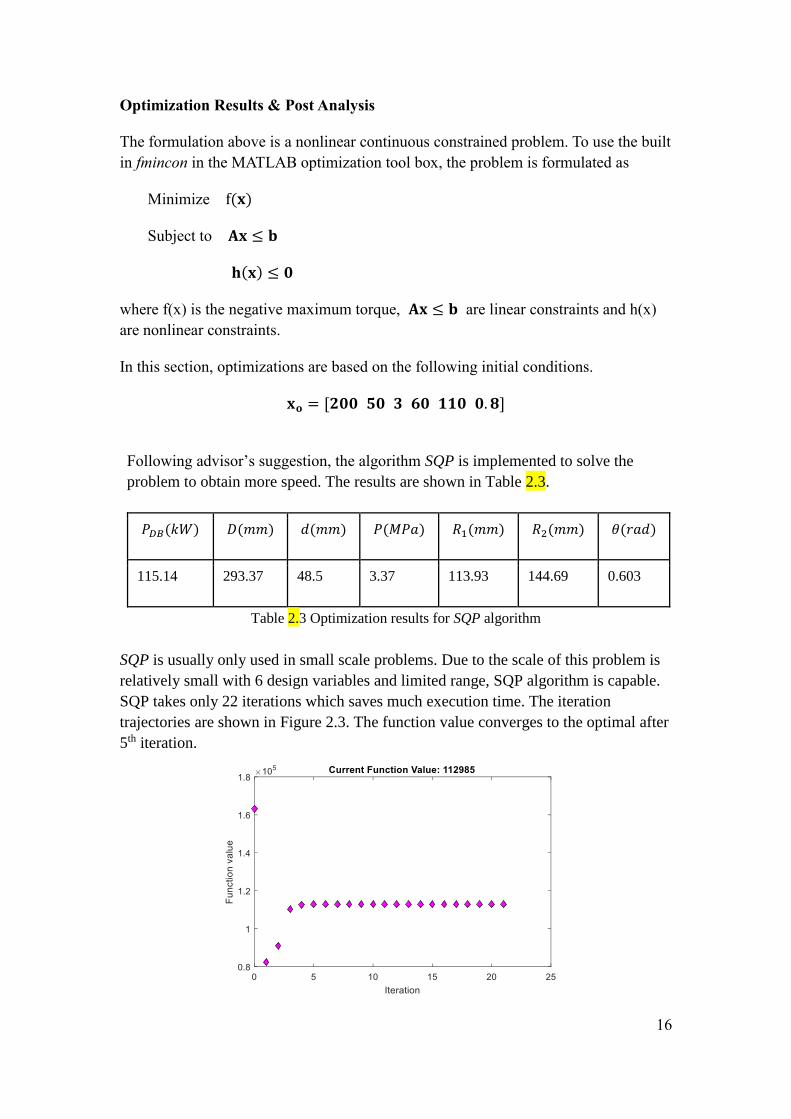
Following advisor’s suggestion, the algorithm SQP is implemented to solve the
problem to obtain more speed. The results are shown in Table 2.3.
𝑃𝐷𝐵(𝑘𝑊) 𝐷(𝑚𝑚) 𝑑(𝑚𝑚) 𝑃(𝑀𝑃𝑎) 𝑅1(𝑚𝑚) 𝑅2(𝑚𝑚) 𝜃(𝑟𝑎𝑑)
115.14 293.37 48.5 3.37 113.93 144.69 0.603
Table 2.3 Optimization results for SQP algorithm
SQP is usually only used in small scale problems. Due to the scale of this problem is
relatively small with 6 design variables and limited range, SQP algorithm is capable.
SQP takes only 22 iterations which saves much execution time. The iteration
trajectories are shown in Figure 2.3. The function value converges to the optimal after
5th iteration.

17
Figure 2.3. Function value converges with SQP
The minimum dissipated power on the brake pad is 112.98kW, corresponding to a friction
area of 18830𝑚𝑚2, which is similar to the existed brake pad design in the market.
Parametric Study of Lower Limit of Maximum Torque
As mentioned in previous section, the lower limit of maximum torque is an output of
the regenerative system. It is important to study the impact of the change in the lower
limit of maximum torque. The default value is 2750 Nm. By increasing and
decreasing the value by 10 , the corresponding objective function values are
evaluated in the following table. As indicated the table, the optimal dissipated power
changes by the same percentage as the required disc braking torque, which is
consistent with the analytical model. When more braking torque is required from the
disc brake, a larger brake pad area is needed, which leads to a larger dissipated power
on the brake pad.
Required Disc Braking Torque 𝑇𝐷𝐵𝐿
+10% -10%
Dissipated Power 𝑃𝐷𝐵(𝑊) 126.65 103.62
Δ𝑃𝐷𝐵 +10% -10%
Table 2.4 Parametric study of the required disc braking torque 𝑇𝐷𝐵𝐿
Sensitivity Analysis
The activities of all the eleven constraints are tested and shown in Table 2.5.
Constraints Activity Lagrange
Multipliers
2
3nμq(R2
3 − R13)θ ≥ TDBL ⋅ SF
Active 0.0279
μTf ≤1
2μLGβr
Non-active 0
β1Re
R1⋅
πd2
4A1p < [P]
Active 47434
1
2⋅
mv12
2tA1≤
1
2μLGβr
Non-active 0
p ≤ pm Non-active 0

18
D ≤ 0.88Dh Active 437.7
R2 + Δ1 ≤D
2
Non-active 0
Dg
2+ Δ2 ≤ R1
Non-active 0
d
2+ ζ +
Dg
2+ Δ3 ≤
R1 + R2
2
Active 875.4
1.27 ≤R2
R1
Active 91779
R2
R1≤ 1.63
Non-active 0
Table 2.5 Activity of all eleven constraints
(1) The sensitivity of the maximum torque constraint is equivalent to the parametric
study, which will not be elaborated in this section.
(2) If the maximum pressure on the brake pad constraint β1Re
R1⋅
πd2
4A1p < [P] is
released by altering [P] from 2.67MPa to 3MPa, the optimal objective function
value is reduced by 46.8 to 60.0kW. The objective function is sensitive to this
constraint.
(3) If one of the active structural constraint −R2
R1≤ −1.27 is released to
R2
R1≤
−1.1, the optimal objective function value is decreased by 24 to 84.9kW. The
objective function is sensitive to this constraint.

19
Whole System: Parallel Braking System
Background
Parallel regenerative braking system is an energy recovery system for hybrid electric
vehicles (HEVs) with combining effort of both conventional friction brake such as disk
brake in this project, and regenerative brake that converts kinetic energy into electric
energy for subsequent re-use.
The whole system is linked together through braking force. As seen from Figure 3.1
below, the braking force provided by disk braking, plus that from regenerative braking
should be equal to the total braking force required. With such connection, the two
subsystems are interactive and dependent on each other.
Figure 3.1: Connections between the overall system and two subsystems.
The goal of the integrated system is to minimize the braking power by specifying
generator operating condition (subsystem 1) and disk braking geometric sizing
(subsystem 2).
Mathematical Model
Coupling Variable
The system is divided into two subsystems using individual disciplinary feasible (IDF)
coordination method, as shown in Figure 3.2 below. The analyzer for each subsystem
is the objective function of each individual system as presented in the previous sections.
However, the coupling variable 𝑇𝐷𝐵 , which is the minimum braking torque
requirement for the disk brake in 𝑁𝑚, is the output of regenerative braking system and
do not require input from disk braking system. So the whole system is weakly coupled
and only 𝑦21 exists. Such characteristic make it easy for the integration and
computation process since fixed point iteration is not necessary.

20
Figure 3.2: IDF system coordination with 𝑦21 = 𝑇𝐷𝐵
Design Variables
There are nine design variables for the combined system, listed in Table 3.1 below. The
first three originate from subsystem 1, and the other six are from subsystem 2. The
definition, type, unit, and bounds are the same as they originally are in each subsystem.
Note that all design variables are local. Because the first two design variables are
discrete, the problem needs to be solved using GA.
Table 3.1: Design Variables for Combined System
Design
Variable Definition Type Unit
Upper and Lower
Bound
𝑇𝑚 Output torque of MG Discrete 𝑁𝑚 [0,600]
𝜔𝑚 Output speed of MG Discrete 𝑅𝑃𝑀 [0,5000]
𝑖 CVT ratio Continuous / [0.5,10]
𝐷 Diameter of the disk Continuous 𝑚𝑚 [200,300]
𝜃 Wrap angle of friction pad Continuous 𝑟𝑎𝑑 [0.1, 2.09]
𝑑 Diameter of brake cylinder Continuous 𝑚𝑚 [35,55]
𝑝 Pressure of braking oil Continuous 𝑀𝑃𝑎 [3,5]
𝑅1 Outer radius of friction pad Continuous 𝑚𝑚 [50,120]
𝑅2 Inner radius of friction pad Continuous 𝑚𝑚 [90,200]

21
Objective Function
The objective is to minimize the net power required by the parallel braking system. The
objective function is defined in Equation 3.1:
Min 𝑃𝑛𝑒𝑡 = 𝑃𝑅𝐵 + 𝑃𝐷𝐵 Equation 3.1
where 𝑃𝑛𝑒𝑡 is the net braking power, 𝑃𝑅𝐵 is the regenerative braking power (a
negative power provided by generator), and 𝑃𝐷𝐵 is the braking power required on the
disk brake pad. The units are all 𝑘𝑊.
The two items in Equation 3.1 are provided separately from the two analyzers.
Constraints
The constraints for the whole system is the combined set of constraints from the two
subsystems. There is one constraint from the regenerative braking system, specified in
Equation 1.4; there are six constraints from the disk braking system, as defined in
Equation 2.5 to 2.14.
As mentioned in previous section, the two subsystems, Regenerative Braking System
and Disc Braking System are weakly coupled, and they are linked by the required
braking torque from the disc braking system. Two system level optimization methods
are implemented to minimize the net power consumption of braking system.
System Level Optimization
As mentioned in previous section, the two subsystems, Regenerative Braking System
and Disc Braking System are weakly coupled, and they are linked by the required
braking torque from the disc braking system. Two system level optimization methods
are implemented to minimize the net power consumption of braking system.
(A) Individual Disciplinary Feasible (IDF)
Method
Since the two subsystems are weakly coupled, the first optimization method we
implemented is the individual disciplinary feasible method.
A set of design variables are assigned to the Regenerative Braking System by the
system level optimizer and the Regenerative Braking System executed with the given
variables and generated a maximum required torque 𝑇𝐷𝐵𝐿. Using the maximum
required torque from disc brake as an input of the Disc Braking System, the power
consumption in Disc Braking System 𝑃𝐷𝐵 is optimized. By combining the power
objective functions of the two subsystem, the minimized net power consumption of
braking system 𝑃𝑛𝑒𝑡 is generated by the system optimizer.

22
However, the randomness of GA leads to a fluctuation in 𝑇𝐷𝐵𝐿. Genetic Algorithm is
used in the Regenerative Braking System because of the discrete variables. Genetic
Algorithm applies mutations by generating some random cases following the given
scale and shrink. 𝑇𝐷𝐵𝐿 is quite sensitive to this change and the program cannot
generate identical 𝑇𝐷𝐵𝐿 in different runs with the same setting. To eliminate the
influence of the randomness, the Regenerative Braking optimization program was
executed for 30 times and the value of 𝑇𝐷𝐵𝐿 is plotted in the Figure 3.3.
Figure 3.3 𝑇𝐷𝐵𝐿 generated by GA in 30 iterations
The maximum value among the 30 results, 𝑇𝐷𝐵𝐿 = 2874.3 𝑁𝑚, is selected as the
lower limit for max braking torque in the Disc Braking System.
Results & Analysis
Using the algorithm stated above, the optimization results in shown in Table 3.2.
𝑃𝑛𝑒𝑡(𝑘𝑊) 𝑃𝐷𝐵(𝑘𝑊) 𝑃𝑅𝐵(𝑘𝑊) 𝑇𝐷𝐵𝐿(𝑁𝑚)
51.0 116.8 -65.8 2874.3
𝐷(𝑚𝑚) 𝑑(𝑚𝑚) 𝑃(𝑀𝑃𝑎) 𝑅1(𝑚𝑚) 𝑅2(𝑚𝑚) 𝜃(𝑟𝑎𝑑) 𝑇𝑚(𝑁𝑚) 𝜔𝑚[𝑅𝑃𝑀] i
293.37 51.42 2.86 113.01 144.68 0.596 310 2170 2.23
Table 3.2 Optimization result with IDF method
23
As indicated in Table 3.2, the minimum net power consumption of the braking system
is 51.0kW when z=0.8. The regenerative braking power is 65.8kW, which is
consistent with the Regenerative Braking System optimization result, though the
design variables varied because of the nature of GA and the problem definition, as
discussed in Robustness Analysis of Regenerative Braking System.
The disc braking power is 116.8kW in the system optimal condition, which is slightly
larger than the subsystem result. The deviation is reasonable because the value of
TDBL generated from the system optimizer is larger than the original setting in Disc
Braking System.
(B) 3.3.2 Multidisciplinary Feasible (MDF)
Method
In this case, the two subsystems are merged together and solved with the one
optimizer. Since there are discrete design variables in Regenerative Braking System,
SQP is not applicable to the overall optimization problem. Genetic algorithm is
implemented to solve the system level problem.
The initial population of the optimization problem is generated randomly between the
Upper Limit and Lower Limit of the system level problem with the following
equation.
𝐼𝑛𝑖𝑡𝑖𝑎𝑙 = 𝐿𝐵 + 𝑟𝑎𝑛𝑑(0,1) ⋅ (𝑈𝐵 − 𝐿𝐵) Equation 3.2
The design variables and the constraints of the two subsystem are directly combined
in this algorithm. The objective function is the net power consumption of the braking
system. There are 7 nonlinear constraints and 5 linear constraints in the system level
problem. The population size of the GA algorithm is 100 and the generation limitation
is 300.
The linking variable is implemented in the nonlinear constraint function. If the current
point is infeasible in the engine map, the algorithm will assign an infeasible large
value to the linking variable TDBL. Otherwise, the value of the linking variable is
assigned as TDBL = Td − Tm, where TD is the torque demand and Tm is the torque
from regenerative brake.
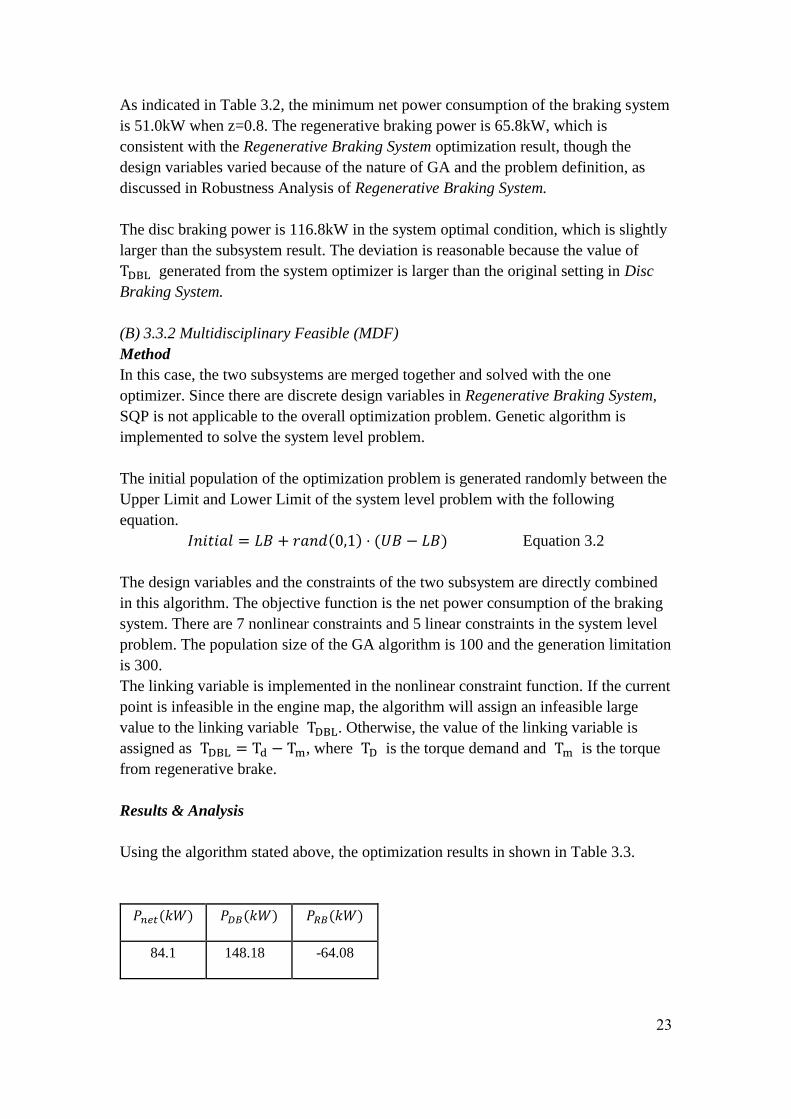
Results & Analysis
Using the algorithm stated above, the optimization results in shown in Table 3.3.
𝑃𝑛𝑒𝑡(𝑘𝑊) 𝑃𝐷𝐵(𝑘𝑊) 𝑃𝑅𝐵(𝑘𝑊)
84.1 148.18 -64.08

24
𝐷(𝑚𝑚) 𝑑(𝑚𝑚) 𝑃(𝑀𝑃𝑎) 𝑅1(𝑚𝑚) 𝑅2(𝑚𝑚) 𝜃(𝑟𝑎𝑑) 𝑇𝑚(𝑁𝑚) 𝜔𝑚[𝑅𝑃𝑀] i
261.12 48.86 3.84 94.88 122.46 1.03 222 2960 7.90
Table 3.3 Optimization result with MDF method
Figure 3.4 GA Convergence plot for the system level problem
As indicated in the figure, the GA algorithm converges rapidly at the first 40
generations and finally approaches the minimum within 300 generations (upper limit).
The minimum power consumption on the braking system is 84.1 kW with this
algorithm, which is much larger than the previous method, which indicates that the
GA algorithm failed to locate the global maximum of the system level problem.
The reason of the deviation is related to the nature of GA. It is hard to sufficiently
mutate and crossover an optimization problem with 9 design variables. In other word,
total number of 9 design variables will make the algorithm instable and inefficient,
which is not recommended by the team.
25
Reference
[1] Jingming, Z., Baoyu, S., & Xiaojing, N. (2008, September). Optimization of parallel
regenerative braking control strategy. In Vehicle Power and Propulsion Conference,
2008. VPPC'08. IEEE (pp. 1-4). IEEE.
[2] Wang, F., & Zhuo, B. (2008). Regenerative braking strategy for hybrid electric
vehicles based on regenerative torque optimization control. Proceedings of the
Institution of Mechanical Engineers, Part D: Journal of Automobile
Engineering, 222(4), 499-513.
[3] Cholula, S., Claudio, A., & Ruiz, J. (2005, September). Intelligent control of the
regenerative braking in an induction motor drive. In Electrical and Electronics
Engineering, 2005 2nd International Conference on (pp. 302-308). IEEE.
[4] Dong, P. E. N. G., Cheng-liang, Y. I. N., & ZHANG, J. W. (2005). An investigation
into regenerative braking control strategy for hybrid electric vehicle. Academic Journal of
Shanghai Jiaotong University.
[5] Kim, D., & Kim, H. (2006). Vehicle stability control with regenerative braking and
electronic brake force distribution for a four-wheel drive hybrid electric
vehicle. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of
Automobile Engineering, 220(6), 683-693.
[6] Mi, C., Lin, H., & Zhang, Y. (2005). Iterative learning control of antilock braking
of electric and hybrid vehicles. Vehicular Technology, IEEE Transactions on, 54(2),
486-494.
[7] Atkins, T.; Escudier, M.(2013). disc brake. In A Dictionary of Mechanical
Engineering. : Oxford University Press. Retrieved 24 Jan. 2016, from
http://www.oxfordreference.com.proxy.lib.umich.edu/view/10.1093/acref/978019958
7438.001.0001/acref-9780199587438-e-1543.
[8] Li,Z. & Zhang, X. (2009). Optimal design for caliper disc brake. Machine Design
and Research, vol.25,no.2,83-85
[9] Zhang, Y., Zhang, H., & Lu, C. (2012). Study on Parameter Optimization Design
of Drum Brake Based on Hybrid Cellular Multiobjective Genetic
Algorithm. Mathematical Problems in Engineering, 2012.
[10] http://www.mathworks.com/help/optim/ug/when-the-solver-fails.html#br77x8v
26
Abbreviation
HEV Hybrid Electric Vehicle
RTD Regenerative Torque Distribution
RTO Regenerative Torque Optimization
EM Electric Motor
CVT Continuous Variable Transmission
GA Genetic Algorithm