mie404 - lecture 1 - introduction.pdf
TRANSCRIPT
MIE404: Control Systems
Lecture 1 – Part ICourse Overview
9/9/2015 MIE404 – Fall 2015 1

Instructor
Amy BiltonAssistant Professor Director – Water and Energy Research Lab
Previous:Controls Engineer at Pratt & Whitney and Honeywell Aerospace
9/9/2015 2MIE404 – Fall 2015
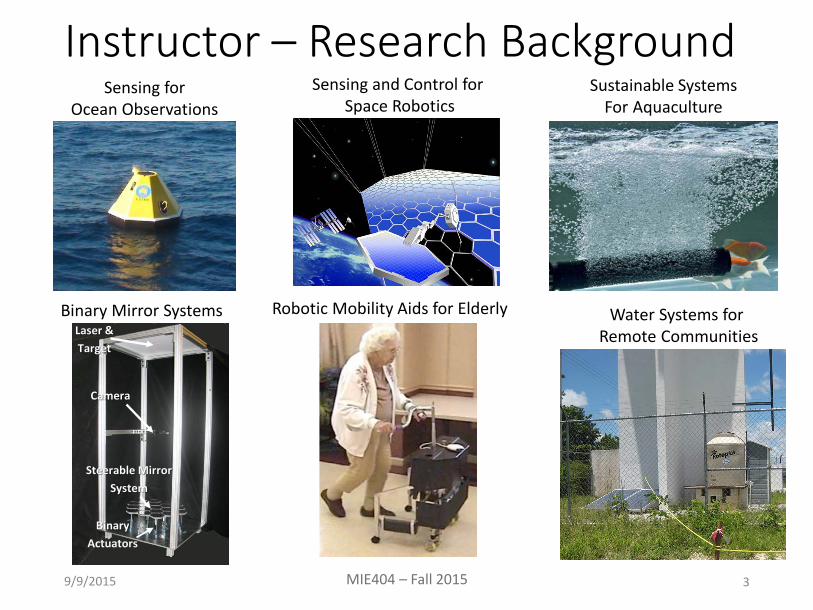
Instructor – Research Background
9/9/2015 3MIE404 – Fall 2015
Binary Mirror Systems Water Systems for Remote Communities
Sensing and Control for Space Robotics
Sensing for Ocean Observations
Robotic Mobility Aids for Elderly
Sustainable SystemsFor Aquaculture
Instructor – Office Hours
• Available for questions• Immediately following lecture• During scheduled office hours
• Wednesday 5-6pm – MC311
• Please feel free to ask!
9/9/2015 MIE315 - Spring 2015 4
Instructor – Classroom Policy
• At the University of Toronto, we are teaching you both technical and professional engineering skills.
• Being attentive and timely are part of those skills.• Talking and entering late are distracting for other
students.• My Policy
• Class starts promptly at 10 minutes after the hour.• Latecomers - enter quietly and quickly find seat.
9/9/2015 MIE315 - Spring 2015 5
Introductions
TA Team
Tutorial TA Edem Dovlo – [email protected]
Lab TA Amro Ibrahim – [email protected]
Lab TA Chi-Hang Kwan – [email protected]
9/9/2015 6MIE404 – Fall 2015

Course Content
9/9/2015 7MIE404 – Fall 2015
ሷݔ + ሶݔ + ݔ = (ݐ)ܨ
System Modeling
ሷݔ + ሶݔ + ݔ = (ݐ)ܨ
Dynamics and Stability
System Control

Control System Examples• Fully Mechanical Systems – Flyball Governor
9/10/2015 8MIE404 – Fall 2015
[1]
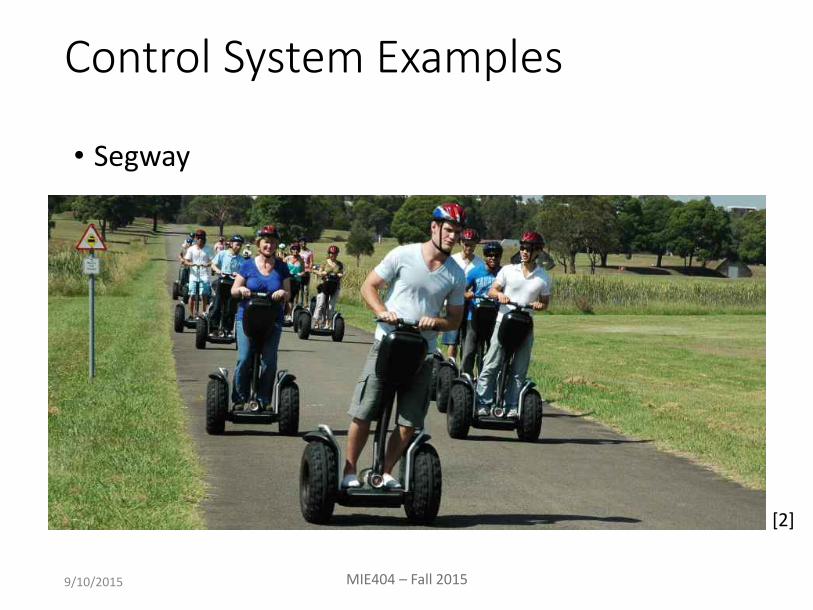
Control System Examples
• Segway
9/10/2015 MIE404 – Fall 2015
[2]

Control System Examples• Robotics
9/10/2015 10MIE404 – Fall 2015
[3]
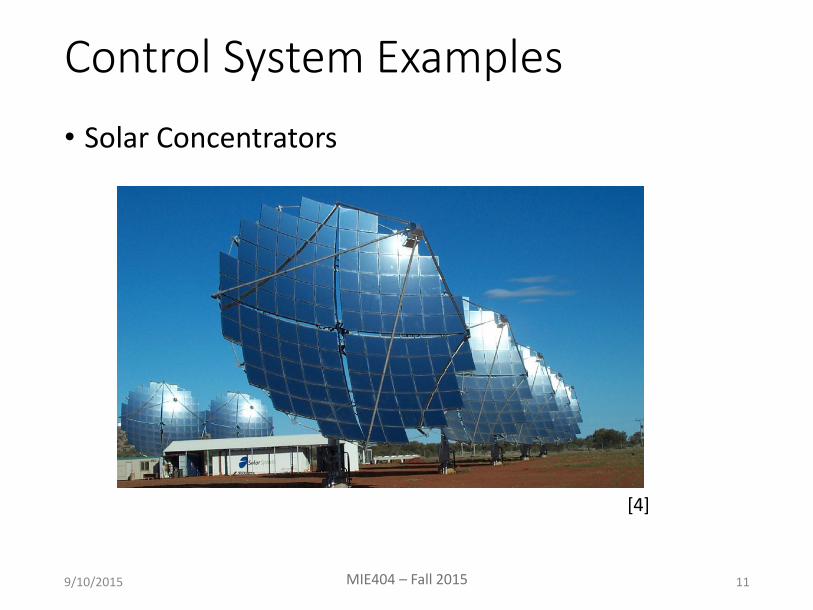
Control System Examples• Solar Concentrators
9/10/2015 11MIE404 – Fall 2015
[4]
Learning Objectives• By the end of this class you will be able to:
• Develop dynamic models for basic linear systems.
• Understand the concepts of system stability and dynamic response.
• Able to apply tools such as root locus, Bode diagrams, and Nyquist diagrams to analyze system stability and design control laws.
• Synthesize control laws to achieve desired stability and dynamic response criteria.
9/9/2015 12MIE404 – Fall 2015
How to achieve these learning objectives ?
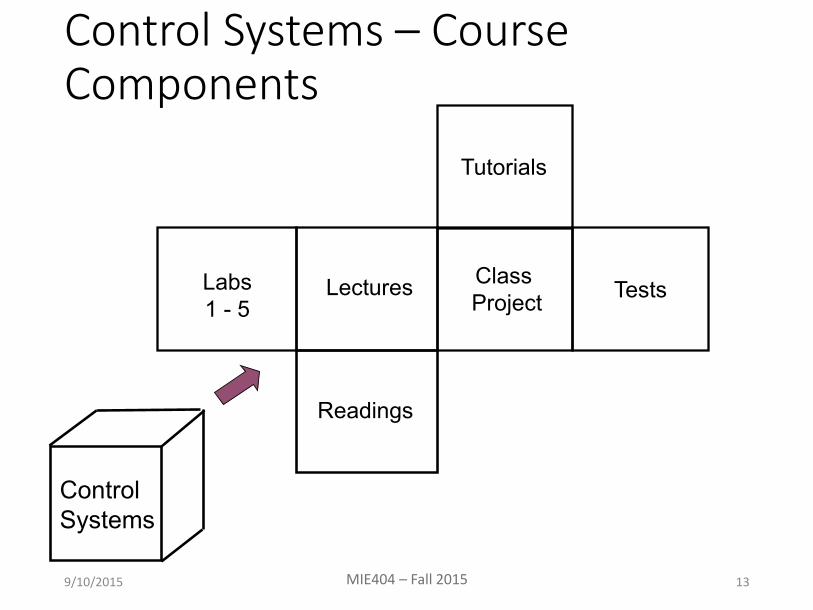
Control Systems – Course Components
9/10/2015 13MIE404 – Fall 2015
Tutorials
Readings
TestsClass Project
Labs1 - 5
Lectures
ControlSystems
Labs
- Start the week of Sept 21.- 5 labs conducted throughout the semester.- Signup online to specify preference of weeks.http://goo.gl/forms/0PouxNLsiv
- Attendance is required!- Reports to be handed in via turnitin.com by Sunday
following lab activity.
9/9/2015 14MIE404 – Fall 2015
Lectures
9/10/2015 15MIE404 – Fall 2015
Tuesdays 3-4 pm – MC102Thursdays 3-5pm – MC102
Lecture notes will posted before each lecture.Outline is present, examples will be filled in during lecture.
Lecture schedule in syllabus.
Part 1:System ModelingPart 2:System Dynamics and StabilityPart 3:Control Design Using Root Locus and Frequency-
Response TechniquesPart 4:State Space Representation

Tutorials
9/10/2015 16MIE404 – Fall 2015
Section 1 - Tuesday 1-3pm HA403 Section 2 - Friday 2-4pm HA403
Attend the assigned tutorial session due to space limitations.
Sample problems will be overviewed by teaching assistant and additional instruction will be provided in required areas.
Readings
GF Franklin, JD Powell, A Emami-Naeini. Feedback Control of Dynamic Systems, 7th edition- Available at the bookstore.- Reference for lectures.- Sample problems in
tutorials.
9/9/2015 17MIE404 – Fall 2015

Tests• Mid-term and final exam will be open lecture notes
and textbook. No other material will be allowed.
• Tentative Midterm Date: Thursday, Oct 29• Time – 90 minutes
9/10/2015 18MIE404 – Fall 2015
Project• Conducted in teams of 2-3 students.
• Will involve modeling, analysis, and control design for a dynamic system.
• Project description to be handed out at mid-point of the semester.
9/10/2015 19MIE404 – Fall 2015
Grading
Labs 10%Mid-Term Test 25% Project 15% Final Exam 50%
Total 100%
9/9/2015 20MIE404 – Fall 2015
MIE404: Control Systems
Lecture 1 – Part IIIntroduction to Control Systems
9/10/2015 MIE404 – Fall 2015 21
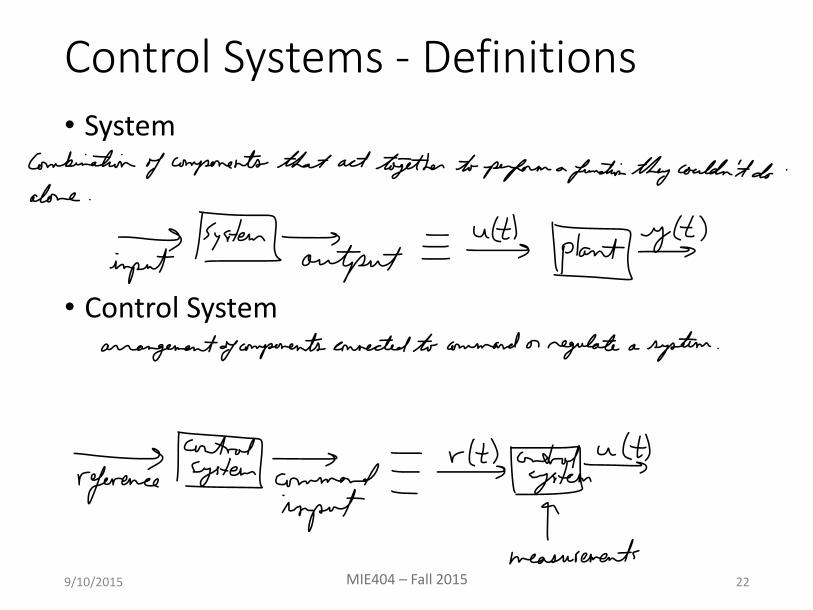
Control Systems - Definitions• System
• Control System
9/10/2015 22MIE404 – Fall 2015
Parts of a Control System• Example Control System – Parabolic Dish Solar
Collector
9/10/2015 23MIE404 – Fall 2015
[4]

Parts of a Control System• Example Control System – Sun Tracking Heliostat
9/10/2015 24MIE404 – Fall 2015
[5]

Open Loop Control• Definition:
• Example:
9/10/2015 25MIE404 – Fall 2015
[5]
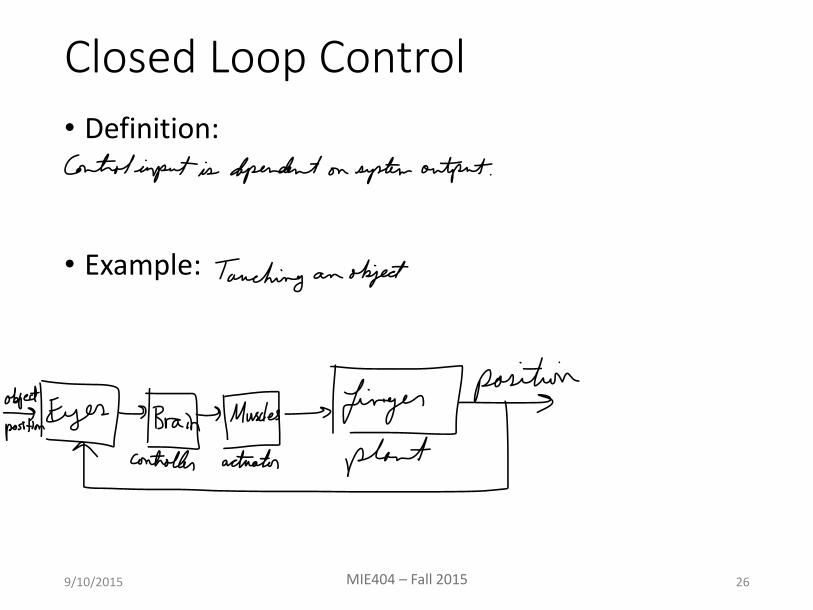
Closed Loop Control• Definition:
• Example:
9/10/2015 26MIE404 – Fall 2015
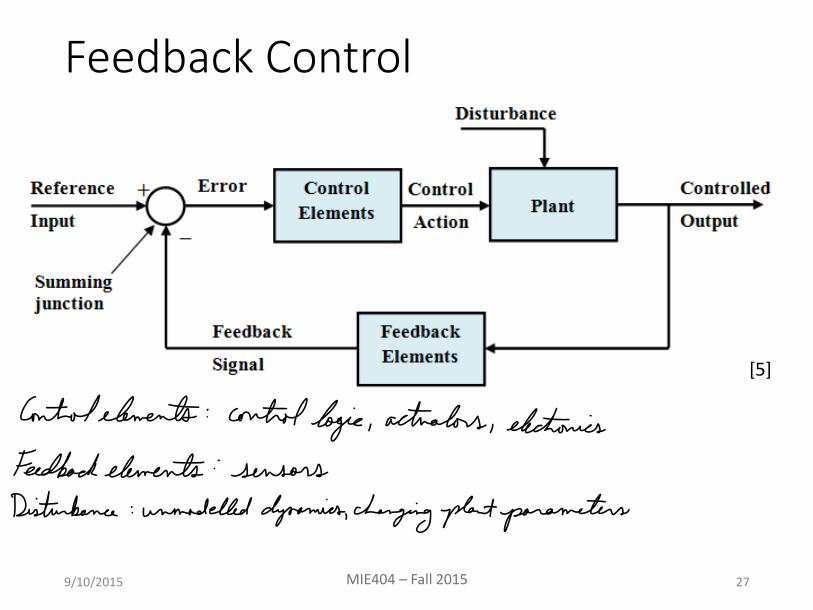
Feedback Control
9/10/2015 27MIE404 – Fall 2015
[5]

Types of Controllers
• Regulators• Controlled output is held as close as possible to a
constant desired value
• Servo-mechanisms • Controlled output is made to track a varying input as
closely as possible
9/10/2015 28MIE404 – Fall 2015

Why Use Feedback?
9/10/2015 29MIE404 – Fall 2015
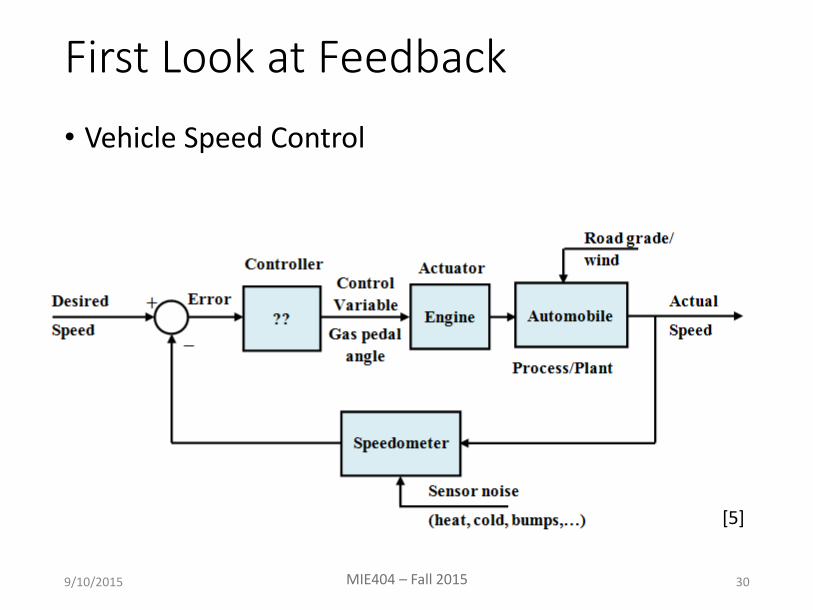
First Look at Feedback • Vehicle Speed Control
9/10/2015 30MIE404 – Fall 2015
[5]

First Look at Feedback• Vehicle Speed Control – Open Loop
9/10/2015 31MIE404 – Fall 2015
10
0.5
Road Grade w
Output Speed y
Control Input u
+
-
K
Plant
Controller
Referencer

First Look at Feedback• Vehicle Speed Control – Closed Loop
9/10/2015 32MIE404 – Fall 2015
10
0.5
Road Grade - w
Output Speed y
Control Input u
+
-
K
Plant
ControllerReferencer +
-
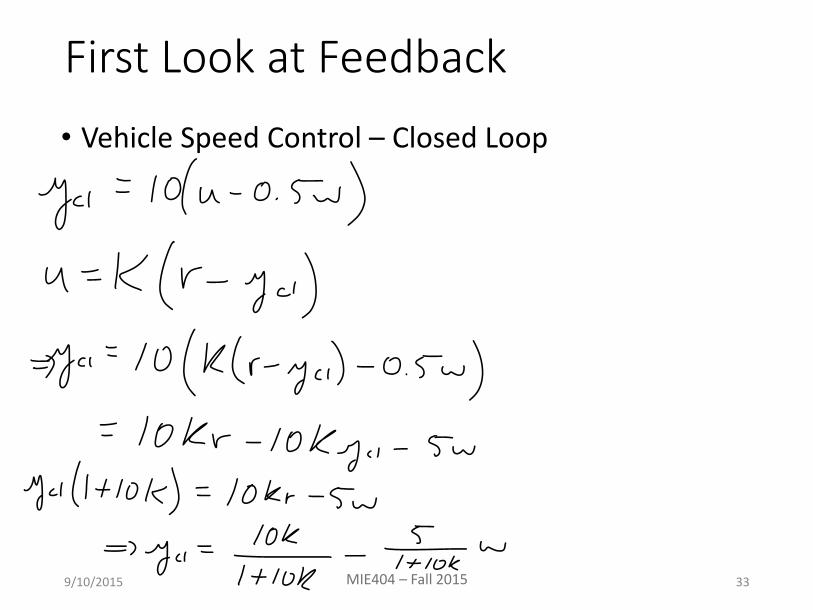
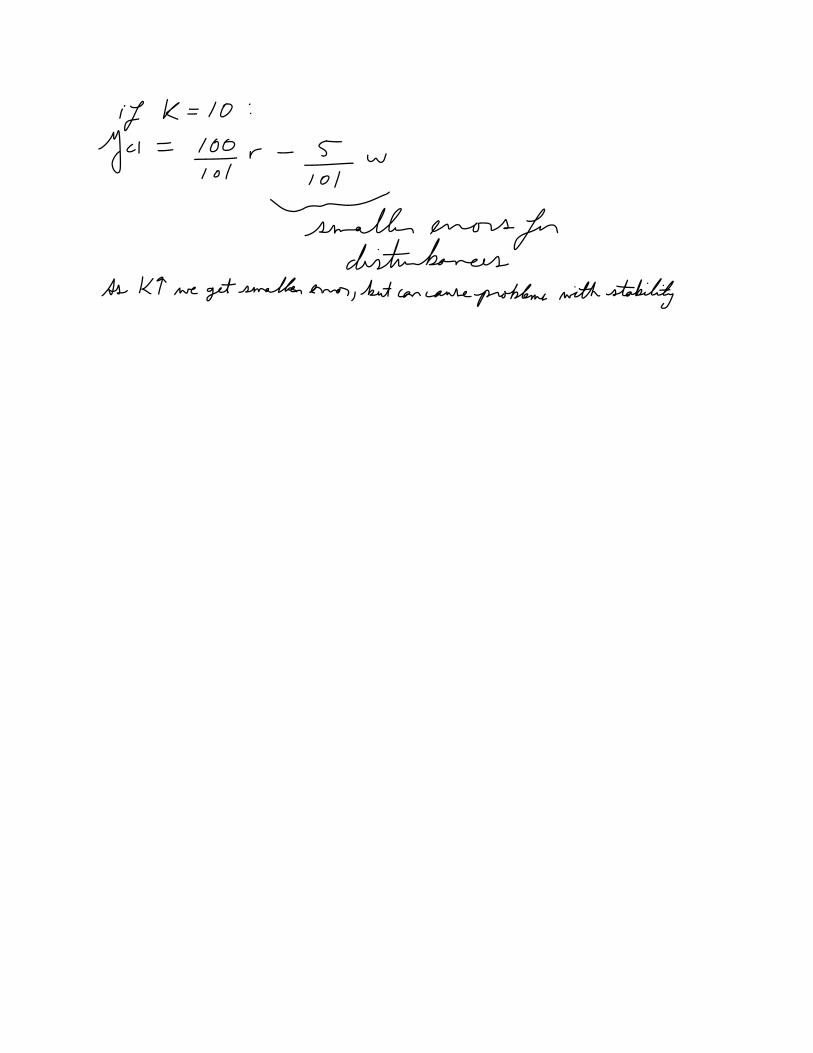
First Look at Feedback• Vehicle Speed Control – Closed Loop
9/10/2015 33MIE404 – Fall 2015
Objectives of Control Engineers
• Selection and arrangement of control system components to achieve a desired performance.
• Starts with a development of simple models of the system.
• Analysis of the system properties.
9/10/2015 34MIE404 – Fall 2015

Review
• Take Away
• Next Lecture
9/10/2015 35MIE404 – Fall 2015

References
[1] http://kids.britannica.com/comptons/art-167033/The-flyball-governor-is-an-early-automatic-control-system-for[2] http://www.ubergizmo.com/2015/04/china-based-company-ninebot-acquires-segway/[3] https://illumin.usc.edu/162/the-quadrotors-coming-of-age/[4] NREL, “Estimating the Performance and Economic Value of Multiple Concentrating Solar Power Technologies in a Production Cost Model”, 2013. Available: http://www.nrel.gov/docs/fy14osti/58645.pdf[5] R. Ben Mrad, “MIE404 Notes – Fall 2014”, 2014.
9/10/2015 36MIE404 – Fall 2015