modÈle hydro-dynamique pour la …¨le-hydrodyn… · web viewtandis que la compétitivité...
TRANSCRIPT

RAPPORT 20/03/2014
MODÈLE HYDRO-DYNAMIQUE POUR LA COMMANDE ET L'OPTIMISATIONProjet européen "ArrowHead"
LCIS – Grenoble INP

LCIS – Grenoble INP
MODÈLE HYDRO-DYNAMIQUE POUR LA COMMANDE ET L'OPTIMISATIONAbstract
Joining the European Arrowhead Project, which looks forward to a modern collaborative automation, we will present in this technical report the irrigation network control problems and the corresponding multi-layer approach. The first layer is the hydraulic network itself represented by a complex model obtained in coupling Shallow Water Equations for free surface flows and the Lattice Boltzmann Method to get a tractable model for the optimization and supervision purposes. The second layer is the heterogeneous communication network using hybrid architectures and 6LoWPAN, unified protocol for wired and wireless sensor networks. The third layer is the optimal reactive control system itself developed using methods from decentralized artificial intelligent systems (namely multi-agent systems). Detailed discussions of each layer with some analytical results will be described in this paper. We will outline the potential interest of the multi-layer approach, more precisely its efficiency and reliability for supervision, energy optimization and control of complex water transportation systems.
Rejoindre le projet européen Arrowhead, qui vise à une moderne automatisation collaborative, nous allons présenter dans ce rapport technique des problèmes de contrôle du réseau d'irrigation et l'approche multi- couche correspondante. La première couche est le réseau hydraulique, elle-même représentée par un modèle complexe et souple, obtenu en couplant les équations de Saint-Venant (ou Shallow Water) de l'écoulement à surface libre et la méthode de Boltzmann sur réseau (Lattice Bolzmann Method - LBM) pour les fins d'optimisation et de supervision. La seconde couche est le réseau de communication hétérogène utilisant des architectures hybrides et 6LoWPAN, protocole unifié pour les réseaux de capteurs câblés et sans fils. La troisième couche est le système de contrôle réactif optimal qui est développé en utilisant des méthodes de systèmes artificiels intelligents décentralisés (les systèmes multi-agents). Des discussions détaillées de chaque couche avec des résultats analytiques seront décrites dans le présent document. Nous allons exposer le potentiel intérêt de l'approche multi- couche, plus précisément son efficacité et la fiabilité de la supervision, l'optimisation de l'énergie et du contrôle des systèmes complexes de transport de l'eau.
1
LCIS – Grenoble INP
Keywords - decentralized control, optimal control, reactive control, hybrid architecture, complex system, water system, wireless sensor network, multi-agent systems.
2
LCIS – Grenoble INP
RemerciementUn grand remerciement au groupe « Syndicats d’Irrigation Drômois" (SID) qui a fourni toutes les informations concernant la synoptique, la
structure, les données sur les dimensions du réseau d’irrigation « Canal de la Bourne ».
Nous tenons aussi à remercier l’équipe de travail « Projet Arrowhead », en particulier, Monsieur Claude Lepage, Energy Management Optimization and Analytics - Domain Leader et Monsieur Alfredo Samperio – Project Leader Task 1.4, chez Schneider Electric Grenoble pour leur accompagnement, leur support, leurs conseils et leur aide tout au long de la réalisation de ce rapport.
3

LCIS – Grenoble INP
IntroductionDepuis quelques décennies, l’humanité est confrontée à un défi grandissant, et encore plus gravement dans les années à venir ; celui de la
demande énergétique. Tandis que la compétitivité n’est qu’un des aspects de l’impact économique des prix de l’énergie ou de leurs variations, la coopération par des interactions dynamiques entre les producteurs d'énergie; les producteurs-consommateurs d'énergie; les systèmes, les humains et les équipements, permet l’optimisation de la gestion globale de l’énergie. Le projet européen "ArrowHead" (03/2013 – 03/2017) vise à une automatisation coopérative, qui est la clé de ces interactions dynamiques, rendu possible grâce à des technologies développées autour de “Internet of Things” (IoT) et à des architectures orientées « services » [1].
Le projet Arrowhead a pour objectif de favoriser la collaboration et l’implication de tous les partenaires de différents secteurs d’activités ayant un impact sur l’énergie et les produits énergétiques, en fournissant un Framework technique adapté en termes de fonctions et de performances. Les solutions proposées dans plusieurs domaines applicatifs comme l’électromobilité, la production industrielle, la production d'énergie, le marché virtuel de l’énergie, les bâtiments et villes intelligents, le contrôle de l’environnement, etc. peuvent être mises en œuvre et évaluées par le biais de véritables expérimentations. Dans le cadre de ce projet, le sous-projet "Canal de la Bourne" (CB) y joue un rôle démonstratif [2].
Le Canal de la Bourne (en France) présente plusieurs problématiques, que ce soit en termes techniques, économiques ou de conformités. Bien que doté d’une ancienneté historique depuis XVII siècle, la construction de nombreux ouvrages fut réalisée durant de longues années et la mise en culture des plaines le fut principalement dès le XVIII siècle. Le système du canal de 46 km de longueur (hors les sous-réseaux de canaux secondaires et tertiaires) utilisé pour l’irrigation de grands périmètres par des techniques gravitaires et d’aspersion. Le flux d’eau d’irrigation, provenant de la rivière La Bourne, est prélevé au niveau du barrage d’Auberives, dont le débit en amont est règlementé et limité à 7m3/s ; le complément du niveau d’eau, si nécessaire, est pris par pompage dans l’Isère. Plus loin, l’eau s’écoule dans le réseau constitué d’un canal principal (CB) et 2 canaux secondaires (S2, S3). Puis, des stations de pompage (P) prélèvent l’eau tout au long du canal afin d’alimenter un sous-réseau maillé de canalisations sous pression (PIN). La méthode de distribution d’eau aux usagers est dite "à la demande". Lorsque l’irrigation n’est plus nécessaire, l’eau est toute reconduite à des turbines de production d’électricité qui sera revendue au Réseau de Transport d’Électricité (RTE). Les ouvrages attachés aux canaux en surface libre sont des vannes (V), déversoirs (D) ou mixte (M) ; les instruments de mesure sont des sondes d’évaluation des niveaux et des débitmètres d’ancienne technologie (Fig. 1).
Actuellement, le réseau d'irrigation (IN) est géré par le groupe "Syndicats d’Irrigation Drômois" (SID) qui a fourni certaines informations chiffrées pour l’an 2013 : 2 460 000 Euros de factures énergétiques; 59 000 Euros de transferts téléphoniques; 55 000 000 de m3 d’eau vendus; 14 000 abonnés; 25 000 ha de surfaces irriguées. La prise en compte de ces valeurs a déclenché une étude répondant à plusieurs objectifs qui visent à
4
LCIS – Grenoble INP
optimiser la gestion des systèmes d’irrigation, et à garantir la disponibilité des ressources en eau avec un bon coefficient de sécurité concernant les quantités, en minimisant les coûts énergétiques et d’exploitation. Le rendement du turbinage est très rentable ; sa planification optimale apparaît comme une stratégie à privilégier.
Dans le cadre d’un développement durable, les contributions aux solutions se font par une volonté des populations rurales dans la maîtrise de prévision et d’utilisation de l’eau; des techniques et de l’organisation de la gestion de l’eau adaptée à l’environnement; une diminution des frais relatifs à l’exploitation; la maintenance et l’entretien des réseaux d’irrigation et, enfin, une optimisation du coût énergétique. De cette manière, ils recourent à des outils efficaces d’aide à la décision qui permettent ensuite aux exploitants de prévoir les démarches pour un fonctionnement automatique. D’autres outils peuvent être impliqués dans la modélisation des enjeux associés au coût énergétique, qui aident les gérants à collecter les informations et à planifier l’approvisionnement sur certaines zones en surconsommation instantanée. Dans ce contexte, l’exploitant joue un rôle principal pour satisfaire les usagers en besoin d’eau et leurs bilans économiques, tout en minimisant les coûts dont l’essentiel est dû à la consommation d’électricité lors des pompages.
Après l’expression des besoins comme objectifs et une analyse fonctionnelle du cahier des charges, une étape qu’il est nécessaire de bien connaître le système physique : c’est la phase de modélisation et simulation.
5

LCIS – Grenoble INP
Fig. 1 Schéma synoptique du canal de la Bourne
6

LCIS – Grenoble INP
Modèles hydrodynamiques du système d'irrigation complexe1. Le système hydraulique de l'écoulement à une surface libre
Sur le schéma synoptique du réseau d'irrigation (Fig. 1), nous voyons une partie principale du canal (CB) connectée à deux canaux secondaires (S2, S3) par des interconnexions de type Pompe (P), Vanne (V), Déversoir (D), Mixte (M).
Dans la démarche de modélisation, nous considérons le réseau d’irrigation en trois 3 parties : Une première partie, "canal principal" et "canal secondaire", appartient aux modèles d’écoulement à surface libre; Une deuxième partie "interconnexions", représentant des ouvrages et les pompes, est de modèles spécifiques; La troisième partie sera le réseau maillé sous pression.
Tant que l’eau sous pression peut être caractérisée par un modèle hydrostatique (qui est traité à part et sa modélisation n'est pas présente dans ce rapport). La partie "écoulement à surface libre" sera la plus complexe. En effet, le retard variable en temps dû au transport d’eau, l’effet des vagues superposées, et la non-linéarité forte décrivant principalement les ouvrages confirment le comportement dynamique de ce système.
La spécificité dynamique d’un tel système le rend trop particulier pour en établir un modèle suffisamment explicite et complet. Ce système subit, de plus, des perturbations, qui affectent fortement la modélisation ; notamment, la perturbation climatique, la perte de quantité d’eau due aux fuites (zones perméables) ou au rejet en aval du canal. La plus importante des perturbations étant le prélèvement d’eau aux stations de pompage. Due à la complexité ci-dessus mentionnée, le système CB peut être analysé en décomposant en sous-système (bief, vanne, pompe, ou une structure mixte). Le modèle complet sera le couplage des sous-modèles avec des entrées/sorties représentants la relation entre les blocs. Les fonctions principales issues du modèle sont à prévenir les informations sur le niveau, le débit ou le volume d’eau d’une position dans la section (ou bief) entre les ouvrages en prenant en compte des contraintes du niveau d’eau en amont, à certains endroits des sections ou autour des ouvrages. Ces informations permettront ensuite un contrôle plus complexe pour une optimisation du réseau d’irrigation complet.
Sous certaines hypothèses, telles que la pente est faible, la longueur de la section est beaucoup plus grande que la hauteur d’eau, la distribution de la pression est hydrostatique, le fluide est incompressible, et enfin la viscosité interne peut être négligeable, l'écoulement dans des biefs peut être décrit par les équations dite de Saint-Venant qui sont déduites à partir de la loi de conservation de la masse et de quantité de mouvements. Dans [3], les auteurs ont démontré la Méthode de Boltzmann sur Réseau peut également utilisée pour modéliser efficacement en terme de la précision, de la stabilité numérique et du temps de calcul pour un tel écoulement. C'est la raison pour laquelle nous allons utiliser cette méthode
7

LCIS – Grenoble INP
dans la suite de ce travail. Dans des cas où il y a des non-linéarités, des turbulences, l’érosion, ou l’accumulation de sédiments, les modèles 2D ou 3D sont plus approprié.
Fig. 2 Paramètres d'un biefLes équations de Saint-Venant d'une section (bief) du CB sont suivantes (voir [3]):
∂t h+∂x (hu )=0 (1)
∂t ( hu )+∂x( 12
g h2+hu2)=F (2)
où h : la hauteur d’eau, u : la vitesse horizontale (moyenne verticalement) de l’écoulement, g : l’accélération de la gravité. Le débit est : q = hu. Le terme de force JIghF , prend en compte la pente I, (où I=∂x zb, avec zb : le profil du fond) et le frottement au fond du bief J, qui est modélisé par la formule de Manning-Strickler [5,6]:
J= n2 u2
( BhB+2 h )
43 (3)
avec n : le coefficient de Manning-Strickler.
8

v1
v2
v3
LCIS – Grenoble INP
2. Modélisation avec "Lattice Boltzmann Method" (LBM)La Méthode de Boltzmann sur réseau est attractive en raison de sa capacité puissante à simuler les écoulements de fluides et d'autres
phénomènes physiques [9,10]. Pour ce qui concerne la problématique du CB, il est à noter que cette méthode utilise un modèle D1Q3 à une
dimension x (le pas spatial Δx) et trois vitesses[ v1 v2 v3 ]= [0v (−v ) ], où v=∆ x∆ t (Δt est le pas de temps).
Fig. 3 Modèle D1Q3La modélisation de l’écoulement à surface libre unidimensionnel par LBM, en ajoutant le terme de force extérieure F, s’exprime par les
fonctions de distribution [f1 f2 f3], de la manière suivante :
f i ( x+v ∆ t ,t +∆ t )=f i (x , t )+ 1τ ( f i
e+f i)+ωi∆ tcs
2 v i F (4)
Les grandeurs physiques h et q sont déterminées par :
h=∑i
f i=f 1+ f 2+f 3 (5)
q=hu=∑i
vi f i=v f 2−v f 3 (6)
La conservation de l’isotropie du réseau [3], impose que∑iωi=1, ∑i
v i ωi=0, ∑i> 1ωi v
2=cs2
, ∑iv i
3 ωi=0, et peut déduire les valeurs de ωi :
ω1=23
,ω2=ω3=16
, cs2= v2
3.
Les fonctions de distribution à l’équilibre [3] doivent satisfaire les équations: ∑if i
e=h, ∑i
v i f ie=hu
, ∑i
v i2 f i
e=12
gh2+h u2
, ceux qui donnent :
f 1e=h− 1
2v2 g h2− 1v2 h u2
(7)9

f2 f3x1 x2 x2 xN-2 xN-1 xN
f1f1
f1 f3
f3'f2'
f2
LCIS – Grenoble INP
f 2e= 1
4 v2 g h2+ 12v
hu+ 12 v2 hu2
(8)
f 3e= 1
4 v2 gh2− 12 v
hu+ 12 v2 h u2
(9)
3. Les conditions de bord :Nous considérons un bief ici comme un range de N points : x1, x2, x3, …, xN.
Fig. 4 Modèle D1Q3 avec les conditions de bord.Les fonctions de distribution inconnues (f2 au point x1 et f3 au point xN) sont déterminées en utilisant les conditions au bord. Par exemple,si on veut imposer un débit à l'amont, il faut que:
vB (f 2−f 3 )=Qam→ f 2=Qam
vB+ f 3 (16)
et si on veut imposer la hauteur à l'aval : f 1+ f 2+ f 3=h→ f 3=h−f 1−f 2 (17)
Les conditions aux bords plus complexes seront considérées en détail dans la partie qui suit.
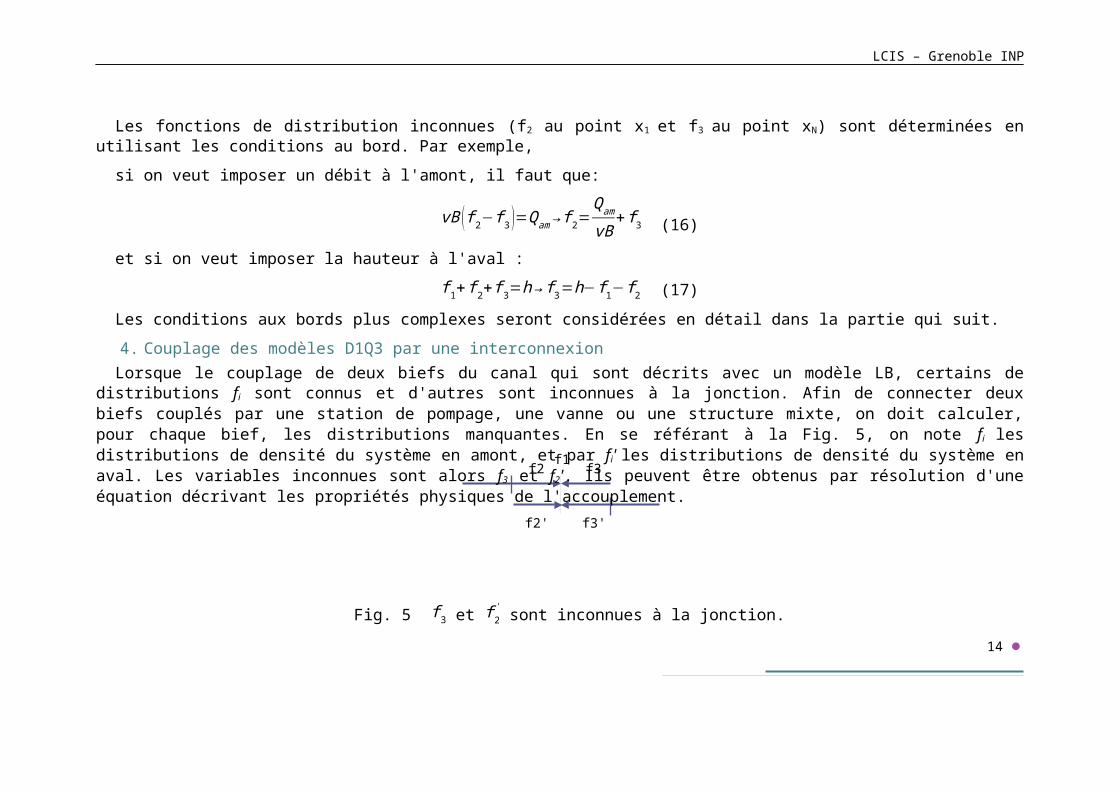
4. Couplage des modèles D1Q3 par une interconnexionLorsque le couplage de deux biefs du canal qui sont décrits avec un modèle LB, certains de distributions fi sont connus et d'autres sont
inconnues à la jonction. Afin de connecter deux biefs couplés par une station de pompage, une vanne ou une structure mixte, on doit calculer, pour chaque bief, les distributions manquantes. En se référant à la Fig. 5, on note fi les distributions de densité du système en amont, et par fi' les distributions de densité du système en aval. Les variables inconnues sont alors f3 et f2'. Ils peuvent être obtenus par résolution d'une équation décrivant les propriétés physiques de l'accouplement.
10

LCIS – Grenoble INP
Fig. 5 f 3 et f 2' sont inconnues à la jonction.
A l'interconnexion, la grandeur physique h est recalculée en fonction de la distribution de densité:
Avant: h=f 1+ f 2+f 3
Après: h'=f 1' +f 2
' + f 3'
Les valeurs connues sont ( f 3' , f 1
' et f 2 , f 1 ), les valeurs à chercher sont ( f 3 et f 2' ).
L’interconnexion par une vanne (V) est présentée dans [3] par les relations:
Q=vB ( f 1−f 2 )=v B' ( f 1' −f 2
' )=Bg αθ √2 g (h−h')où Bg : largeur de la vanne, α : coefficient de la vanne, θ : ouverture, g : gravité.
Fig. 6 Structure d'une vanneLes valeurs sont obtenues par:
f 2=12 (2 f 1+ (1+B /B' ) k2+k √4 (1+B /B' ) f 1+(1+B/ B' )2 k2+4 r )
11

LCIS – Grenoble INP
f 1' = B
B' ( f 1−f 2 )+ f 2'
L’interconnexion par une station de pompage (P) est présentée dans [3], par les relations:
Q=Q '+Q p
h=h'
Fig. 7 Station de pompageLes inconnus sont donc:
f 2=1
1+B /B' (2 f 2' +f 0
' −f 0+ (B /B'−1 ) f 1−Q p
vB )f 1
' = 12+B' / B (2 f 1+f 0−f 0
' + (B '/ B−1 ) f 2' −
Q p
vB )L’interconnexion par une structure mixte (2 vannes et 1 déversoir par exemple), selon [3], est présentée par les relations:
Q=Qg 1+Qg 2+Qs
Q g1=α1 Bg 1θ1√2 g ( h−h ' )
Qg2=α 2 Bg 2 θ2 √2 g (h−h' )
12

LCIS – Grenoble INP
Qs={L s R s (√2 g (h−hs )3 ) sih≥ hs
0 si h<hs
Fig. 8 Une structure mixte comprenant d'un déversoir et deux vannes
Ces équations peuvent être résolues numériquement pour obtenir f2 et f1'.
Modélisation et simulation avec Simulink/MatLab1. Définition du système
Système : Le canal principal d'irrigation (voir l'annexe A sur les dimensions). Scope : Tronçon d'Auberives à l'interconnexion avec S2 (voir le schéma synoptique Fig. 1) :
o 12 biefs (Section 1-12 – Modèle dans l'annexe C, Fichier MatLab Section.m)
o 8 stations de pompage (Baume d'Hostun, Eymeux, Meymans, Papelissier, Isere, Tendillon, Mondy, Mont du Matin – Modèle dans l'annexe D)
o 3 structures mixtes (Ecanciere, Mondy, Orme – Modèle dans l'annexe F)
Sous-systèmes : bief, pompe, vanne, mixte (Block Library – BourneLib.mdl).
2. Identification des composants du système13
LCIS – Grenoble INP
Paramètres : Les valeurs système qui restent constants (Voir les fichiers B_StructureParametres.m, C_LBMParametres.m)
o Les paramètres pour chaque bloc (voir l'annexe H)
Bloc section : B, I, L, n, dt, v, finInit, Np
Bloc vanne : B, Bg, alpha, theta, g, h, h', v Bloc pompe : B, v Bloc structure mixte (2 vannes et 1 déversoir) : B, Bg1, Bg2, Bsw, Hsw, alpha1, alpha2, Rsw, dt, v, hus, hds
o Débit imposé en amont : Qam
o Débit d'une pompe i : Qpi
o Ouverture d'une vanne i : theta(i)
o Hauteur imposé en aval : hav
États : Variables dans le système qui changent au fil du temps
o Fonctions de densité : f = [f1 f2 f3]
En entrée d'un bloc : f_am = [f1_am f2_am f3_am] En sortie d'un bloc : f_av = [f1_av f2_av f3_av]
Signaux : Les valeurs d'entrée et de sortie qui changent dynamiquement lors d'une simulation
o Bloc Section (Bief) :
Entrée : f2_am, f3_av Sortie : f1_av, f2_av, f1_am, f3_am, h, u
o Bloc Pompe :
Entrée : f1_am, f2_am, f1_av, f3_av, Qpi Sortie : f3_am, f2_av
14

LCIS – Grenoble INP
o Bloc Vanne :
Entrée : f1_am, f2_am, f1_av, f3_av, theta(i) Sortie : f3_am, f2_av
o Bloc Mixte (2 vannes, 1 déversoir) :
Entrée : f1_am, f2_am, f1_av, f3_av, theta1, theta2 Sortie : f3_am, f2_av
3. Modélisation des sous-systèmes avec les équationsVoir la liste des fichiers de fonction MatLab dans l'annexe B.
4. Construction des blocs fonctionnelsVoir les modèles de blocs Simulink dans l'annexe C - F.
5. Diagramme des blocs SimulinkVoir le modèle complet du système dans l'annexe G.
6. Démarrage de la simulationD'abord, le modèle doit être initialisé. A partir des équations (1) et (2), on peut constater que le débit d'équilibre est nécessairement uniforme
tandis que le profil de niveau d'eau est en général non uniforme (à moins que la condition I = J est satisfait, ce n'est le cas que lorsque les forces de frottement s'équilibrent précisément les forces de gravité).
a) Dans un premier test, nous effectuons une simulation avec deux biefs ayant un même ensemble de paramètres présentés dans le tableau suivant, reliés par une station de pompage.
Longueur (L)Paramètres géométriques et de simulation
Largeur (B) Pente (I) Pas d’espace (Δx)
Pas de temps (Δt)
Temps de relaxation (τ)
15
LCIS – Grenoble INP
5000m 5.6m 0.00026 100m 20s 0.7
Le débit en amont est augmenté de 50% de sa valeur initiale Q0= 2 m^3/s linéaire entre t = 80 et t = 1000s. Dans cette même période, le débit d'eau prélevé par la pompe est passé de 0m^3/s à 0.5Q0. Les résultats présentés sur la Fig. 9 (la hauteur d'eau) et la Fig. 10 (le débit) montrent un comportement cohérent du système considéré ce qui signifie que des systèmes plus complexes peuvent être construits de la même manière.
Le résultat de simulation obtenu :
Fig. 9 La hauteur d'eau de deux biefs, modélisés par LBM. Fig. 10 Le débit d'eau pendant le pompage
16

LCIS – Grenoble INP
b) Test 2 biefs et 1 mixte (2 vannes et 1 déversoir) (Fichier Test_1B_1M_1B)
17

LCIS – Grenoble INP
c) Test 3 biefs, 1 pompe et 1 mixte (2 vannes et 1 déversoir) (Fichier Test_1B_1P_1B_1M_1B)
18
LCIS – Grenoble INP
d) Test 4 biefs, 1 pompe et 2 mixte (2 vannes et 1 déversoir) (Fichier Test_1B_1M_1B_1P_1B_1M_1B)
L'efficacité de cette méthode (montré dans [3]) en terme de précision, de performance et de stabilité numérique nous permettra d'envisager la construction le modèle complet du réseau d'irrigation de la Bourne.
e) Validation du simulateur global
Récapitulatifs de résultats19

LCIS – Grenoble INP
Paramètres Valeurs UnitéLongueur totale 36200 mNombre de biefs 12Nombre de vannes 3 Orme, Mondy, EcancièreNombre de station de pompage 8 Baume d'Hostun, Eymeux, Meymans, Papelissier,
Martinet, Tendillon, Mondy, HS – BS, Monts du Matindx 100 mdt 10 sNombre de points 374Durée de simulation 8000 sTemps de calcul (laptop Core i7, 8G RAM) 7 sTemps de calcul en Matlab estimé pour 24h de simulation
84 s
Temps de calcul en C estimé pour 24h de simulation
8 s
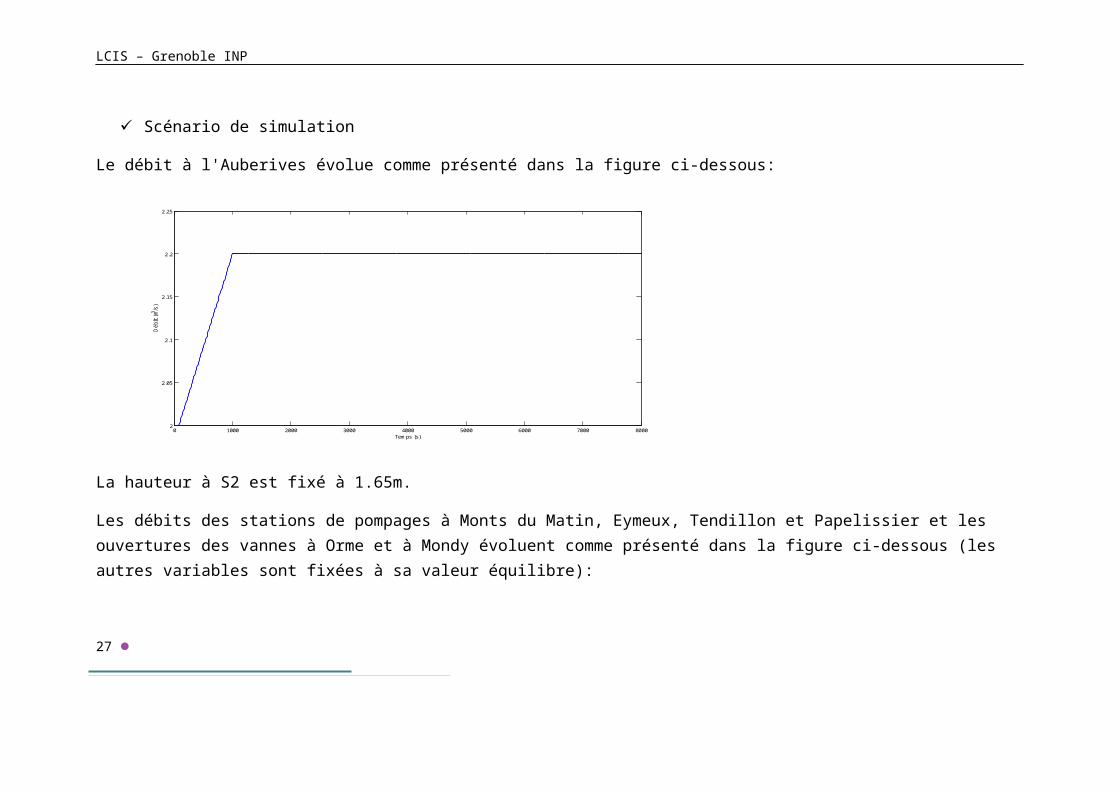
Scénario de simulation
Le débit à l'Auberives évolue comme présenté dans la figure ci-dessous:
20

LCIS – Grenoble INP
0 1000 2000 3000 4000 5000 6000 7000 80002
2.05
2.1
2.15
2.2
2.25
Temps (s)
Déb
it (m3 /s
)
La hauteur à S2 est fixé à 1.65m.
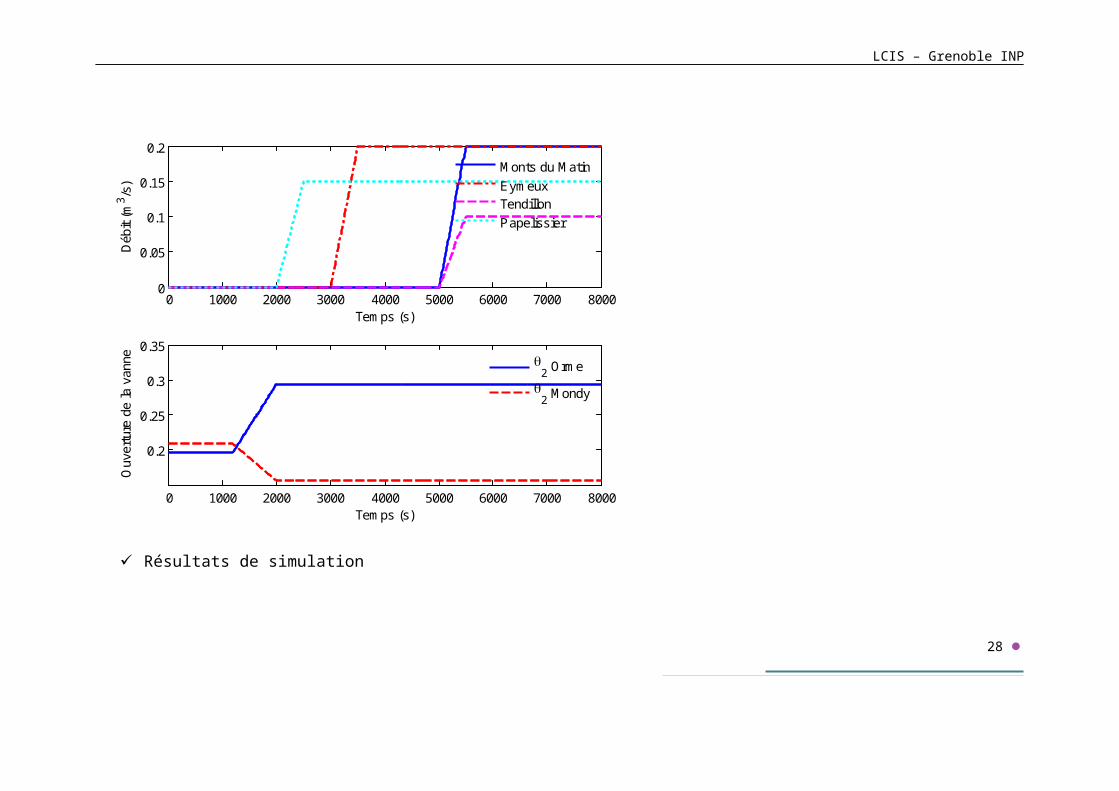
Les débits des stations de pompages à Monts du Matin, Eymeux, Tendillon et Papelissier et les ouvertures des vannes à Orme et à Mondy évoluent comme présenté dans la figure ci-dessous (les autres variables sont fixées à sa valeur équilibre):
21

LCIS – Grenoble INP
0 1000 2000 3000 4000 5000 6000 7000 80000
0.05
0.1
0.15
0.2
Temps (s)
Déb
it (m
3 /s)
0 1000 2000 3000 4000 5000 6000 7000 8000
0.2
0.25
0.3
0.35
Temps (s)
Ouv
ertu
re d
e la
van
ne
Monts du MatinEymeuxTendillonPapelissier
2 Orme
2 Mondy
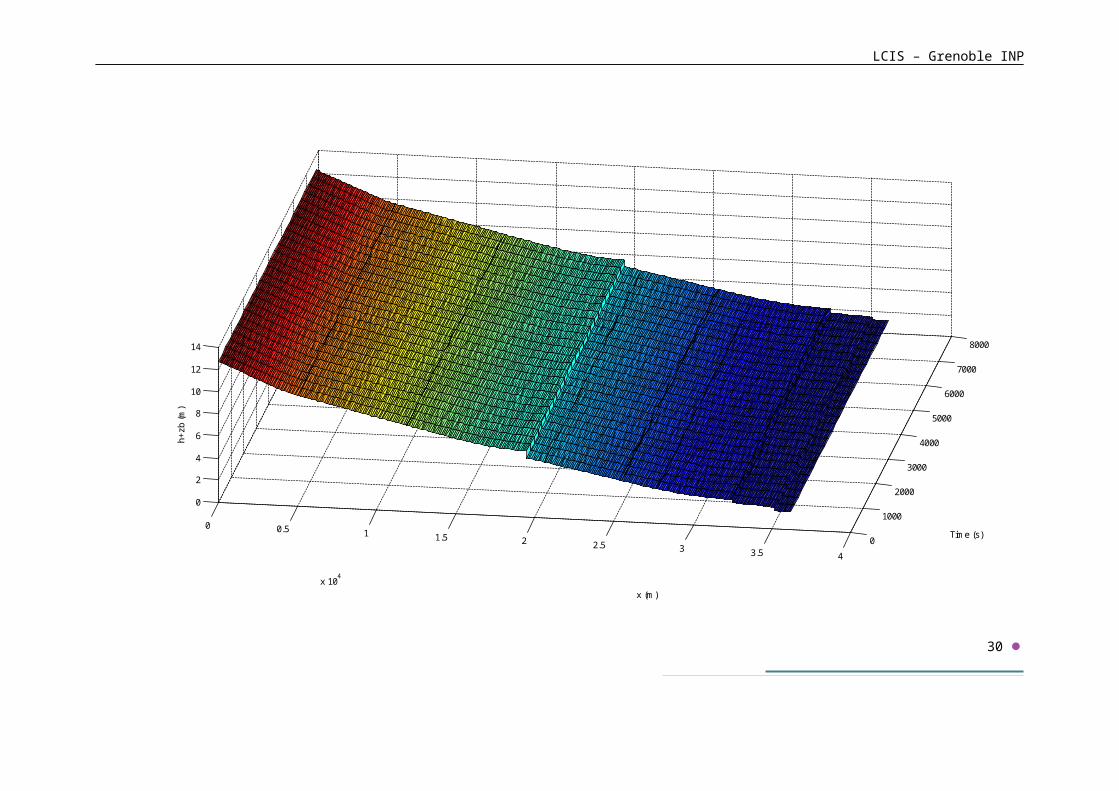
Résultats de simulation
22

LCIS – Grenoble INP
0 0.5 1 1.5 2 2.5 3 3.5 4
x 104
0
1000
2000
3000
4000
5000
6000
7000
8000
1.6
1.8
2
2.2
2.4
2.6
Time (s)
x (m)
Q (m
3 /s)
23

LCIS – Grenoble INP
0 0.5 1 1.5 2 2.5 3 3.5 4
x 104
0
1000
2000
3000
4000
5000
6000
7000
8000
0
2
4
6
8
10
12
14
Time (s)
x (m)
h+zb
(m)
24

LCIS – Grenoble INP
ConclusionDeux points ont été étudiés pendant ce travail : le développement et l’analyse du modèle D1Q3 appliqué sur l’écoulement à surface libre
unidimensionnel, l’interconnexion entre des modèles 1D par les ouvrages. Le modèle D1Q3 développé a été montré qu’il est un concurrent potentiel des méthodes classiques pour modéliser l’écoulement à surface libre unidimensionnel. Il est plus performance, plus exacte et la zone de stabilité est assez large. Les modèles D1Q3 peuvent être interconnectés par des ouvrages hydrauliques qui forment un simulateur de réseau hydraulique complexe.
PerspectivesLes applications à contrôler sont, de plus en plus, des systèmes complexes qui ont le plus souvent un caractère distribué par nature (systèmes
dynamiques à paramètres distribués), ou par construction due à l’intégration au sein d’un système de dispositifs hétérogènes et communicants qui ont par ailleurs leurs propres lois de commande et donc leurs comportements autonomes. Ce rapport propose première étape d'analyse pour certains problèmes, mais il ouvre également à des propositions de méthodologie qui vise à réaliser des systèmes de commande décentralisés coopératifs basés sur les concepts issus de l’automatique, l’informatique, la télécommunication et de l’approche multi-agent. Ceci rendra possible la réalisation de systèmes de contrôle/supervision robuste et efficace ayant de fortes contraintes, ainsi que l'émergence d'applications nouvelles et attractives. Cependant, bien que l’approche multicouche détienne le potentiel à résoudre des problèmes complexes en utilisant l’intelligence collective, existent encore de multiples problématiques de recherches à étudier et une validation expérimentale à conduire sur l'approche globale. Cela suppose une somme de travaux considérables afin d'apporter la fiabilité, la flexibilité, la qualité de service, l’efficacité énergétique,…dans la solution souhaitée.
Références[1] C. Horgan, “Arrowhead – Collaborative automation by networked embedded devices,” Artemis Magazine 15, pp. 13, Dec 2013.[2] V. Boutin, and Schneider Electric analytics for solution team, “Collaborative automation : water network and the virtual market of energy,” ITF Conference in Stockholm, Sweden, 6th Feb 2014.[3] V.T. Pham, B. Chopard, L. Lefèvre, D.A. Ondo, and E. Mendes, “Study of the 1D lattice Boltzmann shallow water equations and its coupling to build a canal network,” Journal of Computational Physics, vol.
229, 7373-7400, Sept 2010.[4] J. Peraire, O. C. Zienkiewicz, K. Morgan, “Shallow Water Problems: A general explicit formulation,” International Journal for Numerical Methods in Engineering, Vol. 22, Issue 3, pp. 547-574, March 1986.[5] A. Lebosse, B. C. Yen, “Estimation of Manning-Strickler roughness coefficient in Saint-Venant equations,” Channel Flow Resistance: Centential of Manning's Formula, Water Resources Publication, pp. 436-
450, 1992.
25

LCIS – Grenoble INP
[6] W. H. Graf, M. S. Altinakar, “Hydraulique fluviale – Ecoulement et phénomènes de transport dans les canaux à géométrie simple,” Traité de génie civil de l'Ecole Polytechnique Fédérale de Lausanne, vol. 16, Presses Polytechniques Universitaires Romandes, 2000 [ISBN 978-2-88074-812-8].
[7] S. Chen, G. D. Doolen, “Lattice Boltzmann method for fluid flows,” Annual Review of Fluid Mechanics, vol. 30, pp.329-364, Jan 1998.[8] B. Chopard, M. Droz, “Cellular Automata Modeling of Physical Systems,” Computational Complexity, pp. 407-443, 2012.[9] D. A. Ondo, L. Lefevre, B. Chopard, “Discrete controllability of distributed parameters systems using Lattice Boltzmann models: An application to the Shallow Water equations,” Proceedings of IFAC World
Congress, Milan, Italy, pp. 9206-9211, Aug 2011.[10] O. Marcou, B. Chopard, S. E. Yacoubi, B. Hamroun, L. Lefevre, E. Mendes, “A Lattice Boltzmann model for the simulation of flows in open channels with applications to flows in a submerged sluice gate,”
Journal of Irrigation and Drainage Engineering, 136(12), pp. 809-822, 2010.[11] Z. Guo, C. Zheng, B. Shi, “Discrete Boltzmann equation model for nonideal gases,” Physical Review E 57, R13(R), 1998.[12] J. Yick, B. Mukherjee, D. Ghosal, “Wireless Sensor Network survey,” Computer Networks, Elsevier, vol. 52, Issue 12, pp. 2292-2330, Aug 2008.[13] O. Hersent, D. Boswarthick, O. Elloumi, “The Internet of Thing : Key Applications and Protocols,” John Wiley & Sons, 2nd Ed., pp. 195-208, Jan 2012 [ISBN: 978-1-119-99435-0].[14] Z. Shelby, C. Bormann, “6LoWPAN: The Wireless Embedded Internet,” John Wiley & Sons, Nov 2009 [ISBN: 978-0-470-74799-5].[15] A. S. Tanenbaum, “Computer Networks, ” Prentice Hall PTR, pp. 362-389, 2010 [ISBN-13: 978-0132126953].[16] T. Luckenbach, P. Gober, S. Arbanowski, “TinyREST - A protocol for Integrating Sensor Networks into the Internet,” Proceeding of REALWSN, 2005.[17] N.B. Priyantha, A. Kansal, M. Goraczko “Tiny Web Services: Design and Implementation of Interoperable and Evolvable Sensor Networks, ” Proceedings of the 6th ACM conference on Embedded network
sensor systems, pp. 253-266, 2008.[18] D. Yazar, A. Dunkels, “Efficient application integration in IP-based sensor networks,” Proceedings of the First ACM Workshop on Embedded Sensing Systems for Energy-Efficiency in Buildings, pp. 43-48,
2009.[19] J. H. Miller, S. E. Page, “Complex adaptive systems : An introduction to computational model of social life,” Princeton University Press, pp. 78-88, 114-139, 2007[20] M. Wooldridge, “An introduction to multi-agent systems,” John Wiley and sons, 2nd Ed., pp. Preface, 2009.[21] J. Ferber, “Multiagent systems: an introduction to distributed artificial intelligence,” Addison-Wesley, pp. 12, Feb 1999 [ISBN-13: 978-0201360486].[22] J. P. Briot, Y. Demazeau, “Principes et applications des systèmes multi-agents,” Hemès/Lavoisier, pp. 1-6, 2001.[23] O. Barreteau, F. Bousquet, “SHADOC: a multiagent model to tackle viability of irrigated systems,” Annals of Operations Research 94, pp. 139-162, 2000.[24] F. Bousquet, O. Barreteau, C. LePage, C. Mullon, J. Weber, “An environmental modelling approach: The use of multi-agent simulations,” Advances in Environmental and Ecological Modelling, Paris, Elsevier, pp.
113-122, 1999.[25] T. Berger, R. Birner, J. Diaz, N. McCarthy, H. Wittmer, “Capturing the complexity of water uses and water users within a multi-agent framework,” Water Resources Management, Springer, vol. 21, Issue 1, pp.
129-148, Jan 2007.[26] O. Barreteau, F. Bousquet, C. Millier, J. Weber, “Suitability of Multi-Agent Simulations to study irrigated system viability: application to case studies in the Senegal River Valley, ” Agricultural Systems, Elsevier,
vol. 80, Issue 3, pp. 255-275, June 2004.[27] K. Fernandes, M. Occello, “A methodological multi-agent approach to build complex systems using integrated reasoning,” Proceedings of 16th IFIP World Computer Congress – International Conference on
Intelligent Information Processing, Beijing, China, Aug 2000.[28] J. P. Jamont, M. Occello, “A multi-agent infrastructure for self-organized physical embodied systems : An application to wireless communication management,” 4th IEEE International Symposium on Advanced
Distributed Systems, Guadalaraja, Mexico, LNCS 3061, Springer-Verlag, 2004.[29] M. Occello, J. P. Jamont, R. Guillermin, M. Pezzin, “A multi-agent approach for an UWB location embedded software architecture,” 5th IEEE/ACM International Conference on Soft Computing as
Transdisciplinary Science and Technology, Cergy-Pontoise, France, 2008.[30] J. P. Jamont, E. Mendes, M. Occello, “A framework to simulate and support the design of distributed automation and decentralized control systems : Application to control of indoor building comfort,” IEEE
Symposium on Computational Intelligence in Control and Automation, Paris, France, 2011.
26
LCIS – Grenoble INP
AnnexesA. Récapitulatif des données sur les dimensions du Canal de la Bourne
Description des sections du canal de la Bourne
Localisation Ouvrage Bief Ouvrage Longeur L (m)
Largeur B (m) Pente I Man. Coeff. n Débit (m3/h) Paramètres
Auberives DEBUT 0,033 h(xA,t) ou u(xA,t)Section 1 5000 5,5 0,00057 0,033 h(x,t),u(x,t)
Baume d'Hostun Pompe 0,033 600Section 2 6900 6 0,00033 0,033 h(x,t),u(x,t)
Eymeux Pompe 0,033 ?Section 3 7600 5,3 0,00032 0,033 h(x,t),u(x,t)
Ecancière Mixte 0,033Section 4 1100 5,6 0,0002753 0,033 h(x,t),u(x,t)
Meymans Pompe 0,033 600Section 5 4800 5,6 0,0002753 0,033 h(x,t),u(x,t)
Papelissier Pompe 0,033 650Section 6 50 5,6 0,0002753 0,033 h(x,t),u(x,t)
Isère Pompe 0,033 ?Section 7 2200 5,6 0,0002753 0,033 h(x,t),u(x,t)
Tendillon Pompe 0,033 2400Section 8 4700 5,6 0,0002753 0,033 h(x,t),u(x,t)
MondyP Pompe 0,033 1700Section 9 50 5,6 0,0002441 0,033 h(x,t),u(x,t)
MondyV Vanne 0,033Section 10 50 5,1 0,0002441 0,033 h(x,t),u(x,t)
Mont du matin Pompe 0,033 2200Section 11 2600 5,1 0,0002441 0,033 h(x,t),u(x,t)
Orme Vanne 0,033Section 12 50 5,2 0,00024 0,033 h(x,t),u(x,t)
Débimètre S2 FIN 0,033 h(xS,t), u(xS,t)
27
LCIS – Grenoble INP
B. Ressources logicielles et matériellesFichier Description Note
ModeleHydrodynamique.docx
Rapport de la modélisation du système pour la commande et l'optimisation
BourneLib.mdl La bibliothèque Simulink complète utilisée dans le modèle du canalTest_Auberives_S2_v2.mdl Le modèle de test du tronçon entre Auberives et jonction S2Parametres.m Tous les paramètres structuraux nécessaires à la simulationParametresLBM.m Paramètres utilisés avec la méthode Lattice Boltzemann Initialisation.m Démarrage des configurations initialesSection.m Fonction Matlab pour le bief
Computeh.m Fonction Matlab pour calculer la valeur de niveau d'eau après un modèle bief
Computeu.m Fonction Matlab pour calculer la valeur de débit d'eau après un modèle bief
OutputSelect.m Fonction Matlab pour sélectionner les sorties après un modèle biefSVEquilibre.m Fonction Matlab pour le profil équilibreScenarioSimulation.m Création des scénarios de simulationLancerSimulation.m Lancement de la simulationTrace12Biefs.m Fonction Matlab pour dessiner les graphesTracer_Rapport.m Fonction Matlab pour dessiner les graphes
28

LCIS – Grenoble INP
C. Modèle d'un bloc Section (Bief)
D. Modèle d'un bloc Pompe
29
LCIS – Grenoble INP
E. Modèle d'un bloc Vanne
F. Modèle d'un bloc Mixte
30

LCIS – Grenoble INP
G. Modèle complet du Canal de la Bourne
31

LCIS – Grenoble INP
H. Les paramètres de la simulation
32
LCIS – Grenoble INP
33

LCIS – Grenoble INP
34