monash university dept research forum 2004 1 active sensing for mobile and humanoid robots - lindsay...
Post on 19-Dec-2015
216 views
TRANSCRIPT

Monash University Dept Research Forum 2004 1
Active Sensing for Mobile and Humanoid Robots - Lindsay Kleeman
Active Sensing for Mobile and Humanoid Robots
Lindsay KleemanIntelligent Robotics Research Centre
Department of Electrical and Computer Systems EngineeringMonash University, Australia
Research Funded by the Australian Research CouncilDiscovery Project DP0210359
ARC Centre for Perceptive and Intelligent Machines in Complex Environments

Monash University Dept Research Forum 2004 2
Active Sensing for Mobile and Humanoid Robots - Lindsay Kleeman
Contents Advanced Sonar Humanoid Tracking Experiments

Monash University Dept Research Forum 2004 3
Active Sensing for Mobile and Humanoid Robots - Lindsay Kleeman
Advanced Sonar Sensors
DSP sonars sensors
Mobile robot travels at speeds up to 1 metre/sec.
Sonar sensors can trackacoustic reflectors from angle measurements.
Sonar can scan back andForth building a map
Monash University Dept Research Forum 2004 4
Active Sensing for Mobile and Humanoid Robots - Lindsay Kleeman
Target Tracking - Moving Target

Monash University Dept Research Forum 2004 5
Active Sensing for Mobile and Humanoid Robots - Lindsay Kleeman
Target Tracking - Moving Robot
Monash University Dept Research Forum 2004 6
Active Sensing for Mobile and Humanoid Robots - Lindsay Kleeman
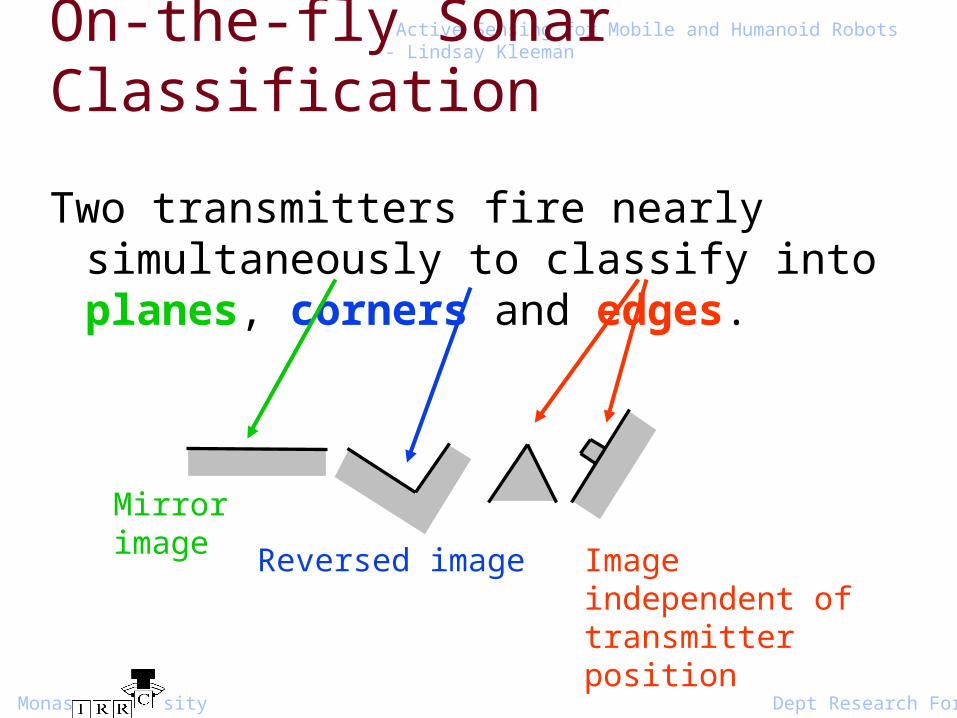
On-the-fly Sonar Classification
Two transmitters fire nearly simultaneously to classify into planes, corners and edges.
Mirror image
Reversed image Image independent of transmitter position

Monash University Dept Research Forum 2004 7
Active Sensing for Mobile and Humanoid Robots - Lindsay Kleeman
Autonomous Exploration

Monash University Dept Research Forum 2004 8
Active Sensing for Mobile and Humanoid Robots - Lindsay Kleeman
Sonar SLAM

Monash University Dept Research Forum 2004 9
Active Sensing for Mobile and Humanoid Robots - Lindsay Kleeman
SLAM with Loops

Monash University Dept Research Forum 2004 10
Active Sensing for Mobile and Humanoid Robots - Lindsay Kleeman
SLAM with Loops

Monash University Dept Research Forum 2004 11
Active Sensing for Mobile and Humanoid Robots - Lindsay Kleeman
Simultaneous Localisation and Mapping (SLAM)
Difficulties with classic Kalman Filter Soln:– computation per step and memory scales as n2,
n=number map features– association problem– kidnapped robot– loop closing– multi-sensor fusion with inconsistency, noise..
Future research to study these problems.

Monash University Dept Research Forum 2004 12
Active Sensing for Mobile and Humanoid Robots - Lindsay Kleeman
Metalman in action ….
Geoff Taylor’s PhD work…

Monash University Dept Research Forum 2004 13
Active Sensing for Mobile and Humanoid Robots - Lindsay Kleeman
Metalman likes rice …hard and uncooked.