multi objective optimization of transonic airfoil · pdf filemulti objective optimization of...
TRANSCRIPT

MULTI OBJECTIVE OPTIMIZATION OF TRANSONIC AIRFOILUSING CST METHODOLOGY WITH GENERAL AND
EVOLVED SUPERCRITICAL CLASS FUNCTION
Pramudita Satria Palar∗∗Graduate Student, Department of Aeronautics and Astronautics, The University of Tokyo
Keywords: CST, modified CST, transonic airfoil, optimization, multi objective
Abstract
CST method is a powerful parameterizationmethod because of its simplicity, robustness, andits ability to be generalized into various possi-ble shapes of aerodynamic bodies. The geometryfrom CST itself is mainly determined by the for-mula of class and shape function. Application ofCST to transonic airfoil optimization is still rareand more studies are needed. This work stud-ies the application of CST and modified CST tothe transonic airfoil multi-objective optimizationproblem. Various scheme for optimization suchas free lower and upper bound and reuse of theinformation from existing airfoil are performedin this work. An Euler solver with NSGA-II al-gorithm is employed to find the Pareto front withmaximizing lift and minimizing drag coefficientas the objectives. Furthermore, robust optimiza-tion with the L/D ratio as the objective is alsoperformed. Results show that reusing the infor-mation of existing airfoil could help to reduce thepossible shape of airfoil, and thus makes the op-timization scheme more effective. Moreover, theevolved class function also perform fairly wellcompared to the standard class function. It isalso found that the mean and standard deviationof L/D ratio are two highly conflicting objectives.
1 Introduction
Contribution to the aerodynamic performance ofan aircraft mainly comes from the wing as itsmain aerodynamic forces generator. The designand selection of an airfoil, as a cross sectional
part of the wing, shares a large and importantportion in the wing design itself. Optimizationplays another role where the performance can beoptimized to obtain benefits such as lower fullconsumption if the drag is minimized or high en-durance if the L/D ratio is maximized. To opti-mize an airfoil, typically the shape of an airfoilis altered during the optimization process to ob-tain a specific goal. However, to use all set ofcoordinates for the design variables is almost im-possible. To greatly reduce the design variablesfrom almost infinity to a finite set, airfoil param-eterization method is employed to represents anexisting or totally new airfoil.
Example of such airfoil parameterizationmethods are Hicks Henne function, PARSEC, B-spline parametrization, and the newly introducedKulfan parameters, or CST method [1]. The lat-ter is introduced by Kulfan and there are alreadysome researches tried to explore the capabilitiesof CST method. CST method is a powerful pa-rameterization method because of its simplicity,robustness, and its ability to be generalized intovarious possible shapes of aerodynamic bodies.CST with low order polynomial is also suitablefor airfoil preliminary design and optimizationpurpose since it only needs few parameters togives a specific shape of airfoil.
Application of CST to the optimization oftransonic airfoil is still rare and more studies areneeded. This work studies the application of CSTand modified CST to the multi-objective opti-mization problem of transonic airfoil. Study isperformed on how lower and upper bound af-
1

PRAMUDITA SATRIA PALAR
fects the optimization search with CST and non-standard class function is also tried. The goal ofthis paper is to do a preliminary study of howCST behaves in multi objective optimization oftransonic airfoil case. Beside of that, preliminaryexperiment of robust optimization with CST isalso performed with stochastic expansion as theuncertainty quantification method. Robust opti-mization is important to ensure that the optimumsolution is robust to the uncertainties. Anothergoal of this paper is to stand as a first step intothe study of CST parameterization coupled withrobust optimization methodology for more com-plex cases of transonic airfoil optimization.
2 CST for Airfoil Parameterization
CST is a relatively new airfoil parameterizationthat uses Bernstein Polynomial as its buildingblock to generate aerodynamic shape. Generallyspeaking, the original CST is developed to gener-ate various aerodynamic shapes and is not limitedto the airfoil shape only. For example, CST couldgenerates the shape of wing, fuselage, supersonicaircraft, and else. The specificness of the shape isdepends on the class function of CST. For an air-foil shape, the class function is defined with fixedparameters inside the class function itself. Mod-ification of CST is also done with the additionof trailing edge ordinate location and its thick-ness which are not exists in the original CST. Thegood thing about Bernstein polynomial, and CSTitself, is that the smoothness of its curve is ben-eficial for optimization purpose. Because of thenumber of parameters can be tuned easily by al-tering the order of Bernstein polynomial, CST issuitable for either conceptual or preliminary de-sign of airfoil. The expression for CST is givenon the next paragraph.
The upper surface and lower surface of CSTwhere C and S are the class and shape function,respectively, are expressed as:
( zc
)upper
=CN1N2
(xc
)SU
(xc
)+
xc
zte
2c++
xc
dzte
2c(1)
( zc
)lower
=CN1N2
(xc
)SL
(xc
)+
xc
zte
2c++
xc
dzte
2c(2)
Where zte and dzte and are trailing edge or-dinate location and trailing edge thickness, re-spectively, addition of zte into the equation resultsin modified CST while standard CST omits thisterm. N1 and N2 are constant with values of 0.5and 1, respectively. The class function CN1
N2 is de-fined as:
CN1N2
(xc
)=(x
c
)N1(−x
c
)N2(3)
The general shape function SU (for upper sur-face) and SL (for lower surface are defined as:
SU
(xc
)=
NU
∑i=0
AU(i)S(x
c, i)
(4)
SL
(xc
)=
NL
∑i=0
AL(i)S(x
c, i)
(5)
Where AU and AL are upper and lower surfaceweights, respectively. NU and NL are the CST or-der of upper and lower surface, respectively. Thecomponent shape function, which could be dif-ferent for upper and lower surface depending onCST order N, is expressed as:
S(x
c, i)= KN
i
(xc
)i(−x
c
)N−i(6)
With K is a binomial coefficient and definedas follows:
KNi =
N!i!(N− i)!
(7)
Figure 1 shows an example of airfoil with andwithout additional trailing edge ordinate locationusing the same CST weights for both upper andlower surface.
Powell modify the existing CST for betterrepresentation of transonic airfoil [2]. The mod-ification is done by using Genetic Programmingto find new class function that "optimized" theshape-fitting for transonic airfoil. For general SCairfoil, the class function for upper surface is:
x(1− x)(1.265x−1.4x1.28x−0.55) (8)
2

Multi Objective Optimization of Transonic Airfoil using CST Methodology with General and EvolvedSupercritical Class Function
Fig. 1 : Standard CST (blue line), CST withzte = 0.1 (black line), and CST with zte =−0.1
(red line).
Fig. 2 : Comparison of general and evolved classfunction with same weights
The class function for lower surface is:
(9)x(1− x)(−1.4x1.28x−0.55 − 11.335x+ 0.0399sin(18.8x + 1.3)− 1.2)
Example of the output from this evolved classfunction is shown in Figure 2 which is adoptedfrom Powell [2].
In the original paper, this evolved class func-tion is used on single-objective optimization oftransonic airfoil to reduce the drag. The ex-tension and study of this new class function formulti-objective optimization of transonic opti-mization is performed in this paper. Global op-timization is more difficult for this evolved classfunction because of the high sensitivity of thegeometric shape to the evolved shape parame-ters. Moreover, the relation of CST parameters tothe real geometry is not intuitive. Clearly, thereshould be a way to reduce this difficulties and wetried to address this on the next chapter.
3 Deterministic ransonic airfoil multi-objective optimization design with CST
In this paper we perform a preliminary study onthe implementation of CST parameterization tothe airfoil multi-objective optimization case. Oneof the difficulties of CST is that its parametervalue is not straightforward and closely related tothe real airfoil parameter such as PARSEC. Thiscould become a difficulty if one want to performglobal optimization using CST as its airfoil pa-rameterization since it is difficult to find suitableCST parameter value. Here in this paper we pro-pose a simple approach to find suitable CST pa-rameter for global optimization by using the in-formation from well-known airfoils. In this paperwe use a set of well-known supercritical airfoilsto generate the lower and upper bound for theoptimization scheme. The variable bounds arefound by analytically fitting some well-knownsupercritical airfoil using CST with general andevolved supercritical class function and then usethe maximum and minimum values of these CSTparameters. The objective in this work is to max-imize Cl (equivalent to minimize −Cl) and min-imize Cd , which is performed to address all as-pects of aerodynamic design [3]
The mathematical model for the optimizationis:
minimize: −Cl,Cd (10)
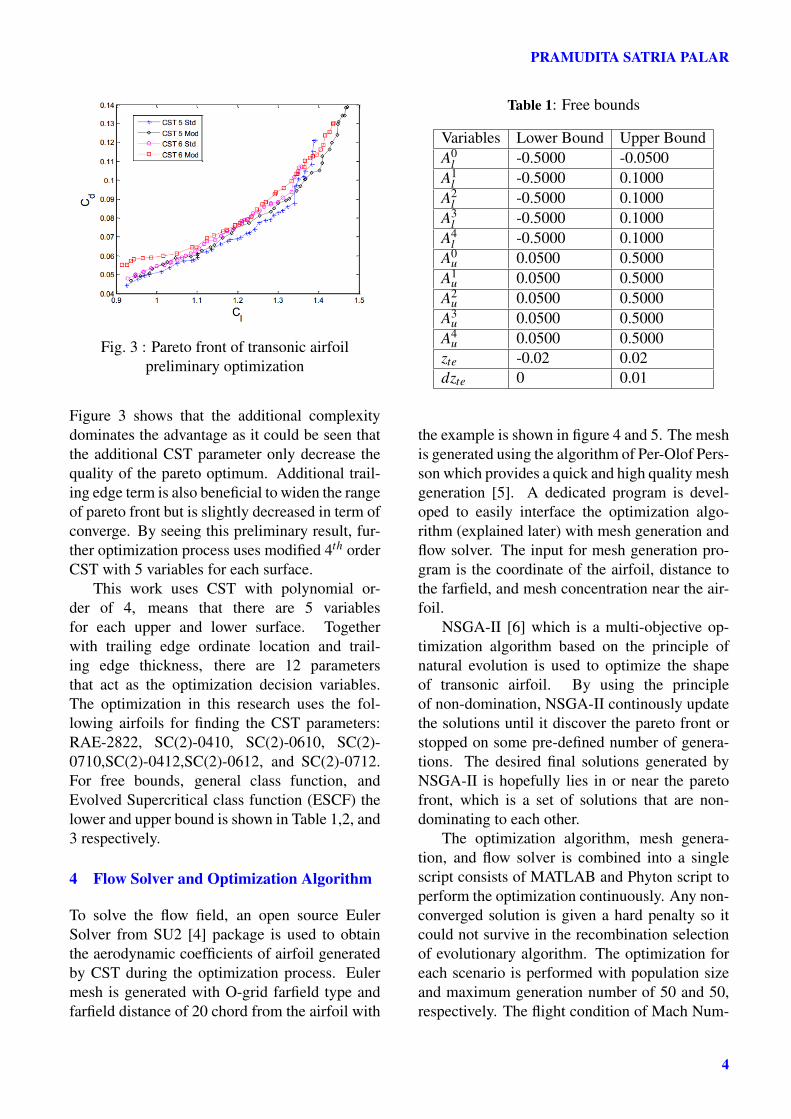
Before we proceed further, we tried to inves-tigate the effect of additional order of CST tobe implemented into the optimization algorithm(solver, optimization, and mesh generation areexplained in chapter 4). It is clear that the addi-tional parameter is an advantage, because the de-gree of freedom of the geometry is higher. How-ever, it comes with a cost of additional complex-ity for the optimization. The optimization is doneusing general class function and the value of up-per and lower bound are obtained using the ex-isting airfoil. The cases tried are standard CSTwithout (Standard) and with additional trailingedge term (modified) and with 5 and 6 variables,denoted by CST 5 Std, CST 5 Mod, CST 6 Std,and CST 6 Mod. The result that is depicted on
3
PRAMUDITA SATRIA PALAR
Fig. 3 : Pareto front of transonic airfoilpreliminary optimization
Figure 3 shows that the additional complexitydominates the advantage as it could be seen thatthe additional CST parameter only decrease thequality of the pareto optimum. Additional trail-ing edge term is also beneficial to widen the rangeof pareto front but is slightly decreased in term ofconverge. By seeing this preliminary result, fur-ther optimization process uses modified 4th orderCST with 5 variables for each surface.
This work uses CST with polynomial or-der of 4, means that there are 5 variablesfor each upper and lower surface. Togetherwith trailing edge ordinate location and trail-ing edge thickness, there are 12 parametersthat act as the optimization decision variables.The optimization in this research uses the fol-lowing airfoils for finding the CST parameters:RAE-2822, SC(2)-0410, SC(2)-0610, SC(2)-0710,SC(2)-0412,SC(2)-0612, and SC(2)-0712.For free bounds, general class function, andEvolved Supercritical class function (ESCF) thelower and upper bound is shown in Table 1,2, and3 respectively.
4 Flow Solver and Optimization Algorithm
To solve the flow field, an open source EulerSolver from SU2 [4] package is used to obtainthe aerodynamic coefficients of airfoil generatedby CST during the optimization process. Eulermesh is generated with O-grid farfield type andfarfield distance of 20 chord from the airfoil with
Table 1: Free bounds
Variables Lower Bound Upper BoundA0
l -0.5000 -0.0500A1
l -0.5000 0.1000A2
l -0.5000 0.1000A3
l -0.5000 0.1000A4
l -0.5000 0.1000A0
u 0.0500 0.5000A1
u 0.0500 0.5000A2
u 0.0500 0.5000A3
u 0.0500 0.5000A4
u 0.0500 0.5000zte -0.02 0.02dzte 0 0.01
the example is shown in figure 4 and 5. The meshis generated using the algorithm of Per-Olof Pers-son which provides a quick and high quality meshgeneration [5]. A dedicated program is devel-oped to easily interface the optimization algo-rithm (explained later) with mesh generation andflow solver. The input for mesh generation pro-gram is the coordinate of the airfoil, distance tothe farfield, and mesh concentration near the air-foil.
NSGA-II [6] which is a multi-objective op-timization algorithm based on the principle ofnatural evolution is used to optimize the shapeof transonic airfoil. By using the principleof non-domination, NSGA-II continously updatethe solutions until it discover the pareto front orstopped on some pre-defined number of genera-tions. The desired final solutions generated byNSGA-II is hopefully lies in or near the paretofront, which is a set of solutions that are non-dominating to each other.
The optimization algorithm, mesh genera-tion, and flow solver is combined into a singlescript consists of MATLAB and Phyton script toperform the optimization continuously. Any non-converged solution is given a hard penalty so itcould not survive in the recombination selectionof evolutionary algorithm. The optimization foreach scenario is performed with population sizeand maximum generation number of 50 and 50,respectively. The flight condition of Mach Num-
4

Multi Objective Optimization of Transonic Airfoil using CST Methodology with General and EvolvedSupercritical Class Function
Table 2: General CST variable bounds
Variables Lower Bound Upper BoundA0
l -0.2167 -0.1300A1
l -0.1331 -0.0747A2
l -0.2733 -0.1398A3
l -0.2097 -0.0734A4
l 0.0378 0.3251A0
u 0.1275 0.2118A1
u 0.0974 0.1404A2
u 0.1603 0.2376A3
u 0.1556 0.2075A4
u 0.1981 0.3356zte -0.0147 0.0005dzte 0 0.0060
Fig. 4 : Sample of computational domain nearairfoil
ber and angle of attack are 0.8 and 20, respec-tively.
5 Results
The optimization result in objective spaces isshown in figure 6. From the result it is visuallyclear that the result from Free bound dominatesthe result from general and evolved class func-
Fig. 5 : Sample of computational domain on thefarfield
Table 3: Evolved CST variable bounds
Variables Lower Bound Upper BoundA0
l -0.1383 -0.0867A1
l -0.0463 -0.0026A2
l -0.0560 -0.0156A3
l -0.0083 0.0065A4
l 0.0042 0.0200A0
u 0.0809 0.1434A1
u 0.1279 0.1899A2
u 0.2743 0.4226A3
u 0.1094 0.4595A4
u 1.5221 2.5328zte -0.0147 0.0005dzte 0 0.0060
tion. To be noted is that there is no geometricalconstraint because we want to see the maximumrange that is attainable by CST parameterizationon multi-objective transonic airfoil optimization.It is also clear to see that the evolved class func-tion dominates the result from general class func-tion but with small burden on the pareto frontspan.
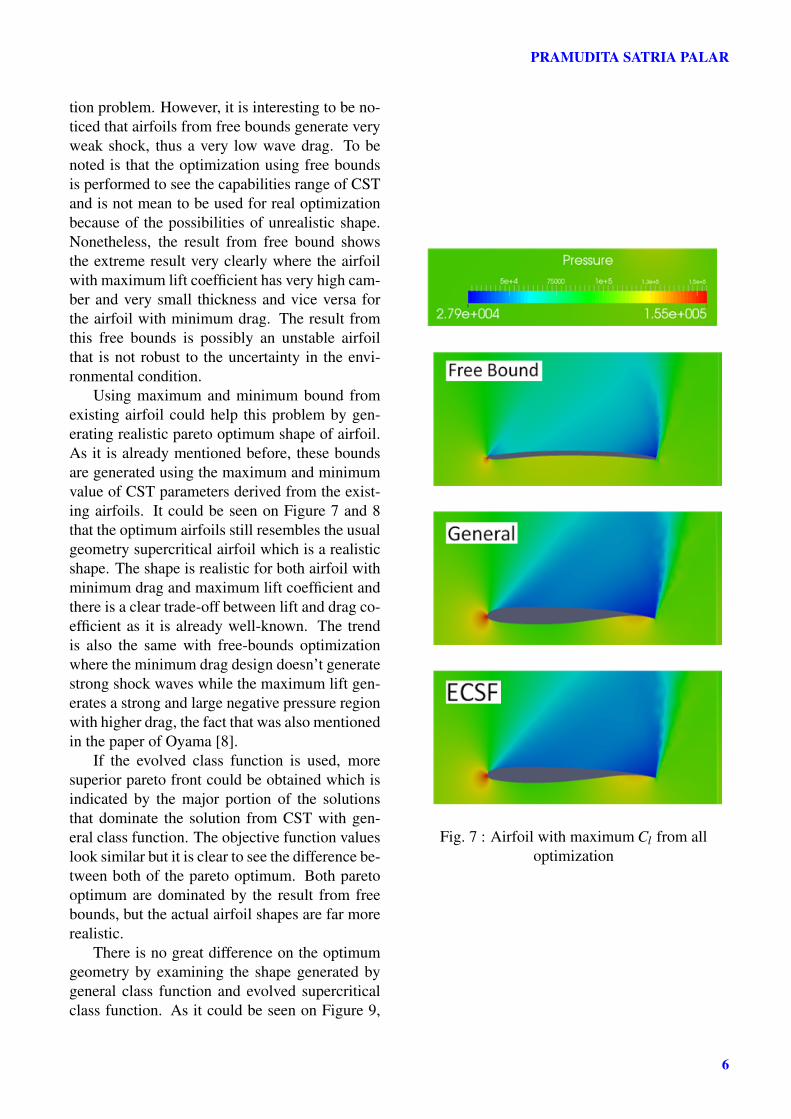
Result shows that the general class functionCST with free bound could find a wide range ofairfoil by still generating feasible shape. The de-piction of the flow field and airfoil shape from theoptimization with maximum Cl and minimum Cdis shown in Figure 7 and 8, respectively. How-ever, the shape of a set of airfoils itself is quiteunrealistic and probably need constrains for rem-edy, which could add the complexity of optimiza-
Fig. 6 : Pareto front from NSGA II
5
PRAMUDITA SATRIA PALAR
tion problem. However, it is interesting to be no-ticed that airfoils from free bounds generate veryweak shock, thus a very low wave drag. To benoted is that the optimization using free boundsis performed to see the capabilities range of CSTand is not mean to be used for real optimizationbecause of the possibilities of unrealistic shape.Nonetheless, the result from free bound showsthe extreme result very clearly where the airfoilwith maximum lift coefficient has very high cam-ber and very small thickness and vice versa forthe airfoil with minimum drag. The result fromthis free bounds is possibly an unstable airfoilthat is not robust to the uncertainty in the envi-ronmental condition.
Using maximum and minimum bound fromexisting airfoil could help this problem by gen-erating realistic pareto optimum shape of airfoil.As it is already mentioned before, these boundsare generated using the maximum and minimumvalue of CST parameters derived from the exist-ing airfoils. It could be seen on Figure 7 and 8that the optimum airfoils still resembles the usualgeometry supercritical airfoil which is a realisticshape. The shape is realistic for both airfoil withminimum drag and maximum lift coefficient andthere is a clear trade-off between lift and drag co-efficient as it is already well-known. The trendis also the same with free-bounds optimizationwhere the minimum drag design doesn’t generatestrong shock waves while the maximum lift gen-erates a strong and large negative pressure regionwith higher drag, the fact that was also mentionedin the paper of Oyama [8].
If the evolved class function is used, moresuperior pareto front could be obtained which isindicated by the major portion of the solutionsthat dominate the solution from CST with gen-eral class function. The objective function valueslook similar but it is clear to see the difference be-tween both of the pareto optimum. Both paretooptimum are dominated by the result from freebounds, but the actual airfoil shapes are far morerealistic.
There is no great difference on the optimumgeometry by examining the shape generated bygeneral class function and evolved supercriticalclass function. As it could be seen on Figure 9,
Fig. 7 : Airfoil with maximum Cl from alloptimization
6

Multi Objective Optimization of Transonic Airfoil using CST Methodology with General and EvolvedSupercritical Class Function
Fig. 8 : Airfoil with minimum Cd from alloptimization
Fig. 9 : Extreme result from general and evolvedclass function
the extremum airfoil shape for both general andevolved class function roughly have the same fea-ture. This is due in fact that both optimizationscheme use the same existing airfoils to gener-ate the lower bound and upper bound. Noticethat the generated lower and upper bound are dif-ferent for both scheme because of the differentclass function. The evolved class function hasmore control on the feature of the transonic air-foil because it is specially derived for the tran-sonic airfoil shape. Meanwhile, even generalclass function can represent any shape of airfoilit find difficulties if there is a drastical change onthe shape of airfoil such as in the lower surfaceof the supercritical airfoil. The airfoil with mini-mum drag coefficient is thicker than its maximumlift coefficient counterpart. This is because forhigh lift design the lower surface is moved up-ward which corresponds to the camber increaseas it already pointed by Oyama [8]. The air-foil with maximum lift coefficient also takes theadvantage of the freedom on trailing edge loca-tion where the trailing edge is now slightly benddownward. Please note that in this work the ge-ometrical constraint are not imposed. It is seemsthat if the bounds are derived from existing air-foils, we could control the geometrical thicknesswithout any additional constraint. However, it isrecommended to still including the geometricalconstraint on the optimization scheme.
The relation between CST parameters and ac-tual shape is far than intuitive for evolved classfunction so careful consideration is needed totune the bound of decision variables. Using theinformation from existing airfoils, any unrealis-tic shape could be prevented. Powell [2] also usesimilar approach where the starting point is basedon the existing airfoil and slightly changes the
7

PRAMUDITA SATRIA PALAR
base CST parameters. Examining the optimumresult, the airfoil with maximum ratio of L/D co-efficient try to balance these two conflicting ob-jectives.
The next step after deterministic optimizationis robust optimization. The evolved class func-tion is chosen as the general class function be-cause it shows good performance on determinis-tic optimization case.
6 Robust Optimization of L/D ratio
Robust optimization is an ongoing trend in fieldof aerodynamic optimization due to the realiza-tion that the deterministic optimization tends tofind solutions that are fragile to the uncertainty.Examples of this uncertainty are the uncertaintyin Mach number and angle of attack which arealleatoric that could be interpreted in probabilis-tic framework. There is also an epistemic (modelform) uncertainty that is caused by our lack ofknowledge to understand the true nature of thesystem. In airfoil transonic optimization litera-ture, the robust optimization also could be de-fined as the optimization to minimize the ex-pected drag coefficient in a range of Mach num-ber. On the next step, we perform a multi objec-tive robust optimization using CST with evolvedclass function. This is a preliminary robust opti-mization of CST with more complex robust casesis an ongoing research. Here, the goal is to maxi-mize and minimize the mean and variance of L/Dratio, respectively.
minimize: mean L/D, std L/D (11)
The L/D ratio is chosen as the objective be-cause it The uncertainty quantification techniqueused in this paper is the non-intrusive stochas-tic expansion method, where the underlying re-sponse is approximated by polynomials that aredefined by the type of the probability distributionof the random variables. The non-intrusivenessof this method allow the use of code that can betreated as the the black box.
The concept of uncertainty quantification us-ing stochastic expansion method is to approxi-mate the functional form between the stochas-
Fig. 10 : Collocation points for robustoptimization case (x-axis is the Mach number
tic response output and each of its random inputswith the following chaos expansion:
R =∞
∑j=0
α jΨ j(ξ) (12)
The coefficient is estimated by perform-ing spectral projection and using tensor product/sparse grid to expand the stochastic expansionand obtaining the collocation points:
α j =〈R,Ψ j〉〈Φ2
j〉(13)
For this preliminary robust optimization ex-periment, the random variable is the Mach num-ber that normally distributed with mean of 0.8,and standard deviation of 0.001. To matchthe normal distribution, Hermite polynomial andquadrature are used to accurately approximatethe response surface of the random variablewhere the depiction of Hermite polynomialscould be seen of Figure 11 . The lower and upperbound of evolved CST is the same with the de-terministic case as it is shown in table 3, exceptthat the angle of attack is now set to zero. For thiscase the location of collocation points for 3,5, and7 points are shown in Figure 10. In this work, weuse the collocation point number of 5.
7 Robust optimization result
Result shows that the preliminary experiment ofrobust optimization of CST is able to find thetrade-off between mean and the variance of theL/D ratio. As it could be seen on figure 12, meanand variance of L/D ratio are highly conflicting
8

Multi Objective Optimization of Transonic Airfoil using CST Methodology with General and EvolvedSupercritical Class Function
Fig. 11 : Hermite polynomials with order from 0to 4
objectives. High lift to drag ratio only can beachieved with very high instability indicated byvery high standard deviation. In other side, rel-atively low L/D ratio seems to possess the prop-erty of reasonable and low standard deviation ofL/D ratio. The analysis is given on the followingparagraphs.
Analysis is first done by seeing the Cl and Cdof the extreme airfoils (maximum mean and min-imum standard deviation) that is listed on the ta-ble 4 where A and B are the airfoil with minimummean and maximum standard deviation of L/D,respectively. The standard deviation of Cl andCd of each airfoil is roughly similar, both airfoilseems to have the same variation trend of aero-dynamic coefficient if uncertainty in Mach num-
Fig. 12 : Pareto front of the robust optimization
ber is subjected. However, if the trend of Cl onthe collocation points is analyzed, the airfoil withminimum mean of L/D ratio has a Cl trend thatreduced if the Mach number is increased whichis the opposite for the maximum standard devia-tion. Because the Cd trend for both airfoil is in-creasing together with the Mach number (causedby stronger shock), minimum mean airfoil haslower standard deviation of L/D ratio comparesto the maximum standard deviation airfoil.
Table 4: Aerodynamic coefficients at the colloca-tion points
Cl (A) Cd (A) Cl (B) Cd (B)M = 0.785 0.884 0.0447 0.576 0.004M = 0.793 0.872 0.0503 0.600 0.007M = 0.800 0.854 0.0552 0.624 0.011M = 0.806 0.830 0.0596 0.644 0.017M = 0.814 0.802 0.0635 0.660 0.023
By analyzing the flow field of the extreme air-foils (Figure 13 and 14), both airfoil shows simi-lar evolution of shock, even though the minimummean airfoil shows stronger shock and thus re-sulting in stronger aerodynamic forces, and viceversa. This result in similar trend of the stan-dard deviation of Cl and Cd with increasing Machnumber.
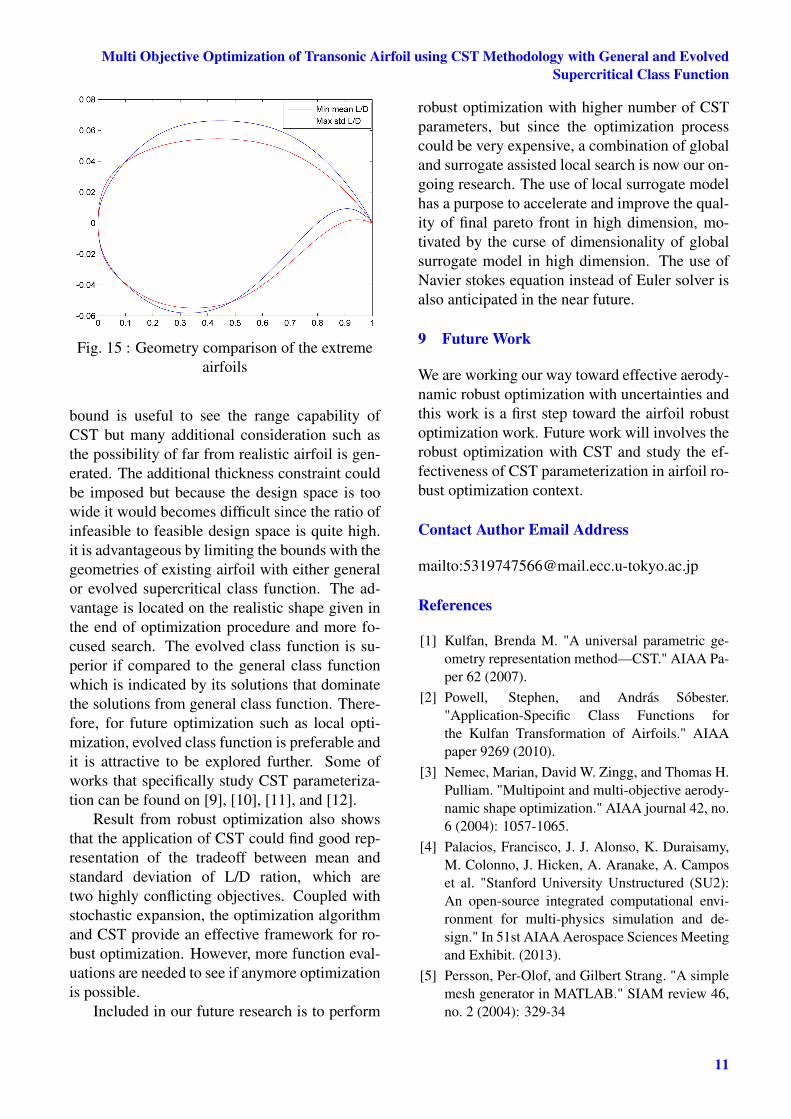
By seeing the geometry comparison as it de-picted on Figure 15, there is no great differencebetween the geometries of airfoil with maximummean and minimum variance of L/D ratio don’tdiffer that much. This is because the lower andupper bound of the evolved class function onlyallow the geometry variation that resembles su-percritical airfoil only. The airfoil with minimumstandard deviation has higher camber on the trail-ing edge part compares to the other extreme air-foil but more analysis and data mining are neededto see if some certain feature of geometry reallyaffect the mean and standard deviation of L/D ra-tio.
8 Conclusion
By comparing the three results from free bound,general, and evolved class function, some con-clusions could be made. Optimization with free
9

PRAMUDITA SATRIA PALAR
(a) M = 0.785
(b) M = 0.793
(c) M = 0.800
(d) M = 0.806
(e) M = 0.814
Fig. 13 : Flow field of airfoil with minimummean of L/D and varying Mach number
(a) M = 0.785
(b) M = 0.793
(c) M = 0.800
(d) M = 0.806
(e) M = 0.814
Fig. 14 : Flow field of airfoil with maximum stdof L/D and varying Mach number
10
Multi Objective Optimization of Transonic Airfoil using CST Methodology with General and EvolvedSupercritical Class Function
Fig. 15 : Geometry comparison of the extremeairfoils
bound is useful to see the range capability ofCST but many additional consideration such asthe possibility of far from realistic airfoil is gen-erated. The additional thickness constraint couldbe imposed but because the design space is toowide it would becomes difficult since the ratio ofinfeasible to feasible design space is quite high.it is advantageous by limiting the bounds with thegeometries of existing airfoil with either generalor evolved supercritical class function. The ad-vantage is located on the realistic shape given inthe end of optimization procedure and more fo-cused search. The evolved class function is su-perior if compared to the general class functionwhich is indicated by its solutions that dominatethe solutions from general class function. There-fore, for future optimization such as local opti-mization, evolved class function is preferable andit is attractive to be explored further. Some ofworks that specifically study CST parameteriza-tion can be found on [9], [10], [11], and [12].
Result from robust optimization also showsthat the application of CST could find good rep-resentation of the tradeoff between mean andstandard deviation of L/D ration, which aretwo highly conflicting objectives. Coupled withstochastic expansion, the optimization algorithmand CST provide an effective framework for ro-bust optimization. However, more function eval-uations are needed to see if anymore optimizationis possible.
Included in our future research is to perform
robust optimization with higher number of CSTparameters, but since the optimization processcould be very expensive, a combination of globaland surrogate assisted local search is now our on-going research. The use of local surrogate modelhas a purpose to accelerate and improve the qual-ity of final pareto front in high dimension, mo-tivated by the curse of dimensionality of globalsurrogate model in high dimension. The use ofNavier stokes equation instead of Euler solver isalso anticipated in the near future.
9 Future Work
We are working our way toward effective aerody-namic robust optimization with uncertainties andthis work is a first step toward the airfoil robustoptimization work. Future work will involves therobust optimization with CST and study the ef-fectiveness of CST parameterization in airfoil ro-bust optimization context.
Contact Author Email Address
mailto:[email protected]
References
[1] Kulfan, Brenda M. "A universal parametric ge-ometry representation method—CST." AIAA Pa-per 62 (2007).
[2] Powell, Stephen, and András Sóbester."Application-Specific Class Functions forthe Kulfan Transformation of Airfoils." AIAApaper 9269 (2010).
[3] Nemec, Marian, David W. Zingg, and Thomas H.Pulliam. "Multipoint and multi-objective aerody-namic shape optimization." AIAA journal 42, no.6 (2004): 1057-1065.
[4] Palacios, Francisco, J. J. Alonso, K. Duraisamy,M. Colonno, J. Hicken, A. Aranake, A. Camposet al. "Stanford University Unstructured (SU2):An open-source integrated computational envi-ronment for multi-physics simulation and de-sign." In 51st AIAA Aerospace Sciences Meetingand Exhibit. (2013).
[5] Persson, Per-Olof, and Gilbert Strang. "A simplemesh generator in MATLAB." SIAM review 46,no. 2 (2004): 329-34
11

PRAMUDITA SATRIA PALAR
[6] Deb, Kalyanmoy, et al. "A fast and elitist mul-tiobjective genetic algorithm: NSGA-II." Evolu-tionary Computation, IEEE Transactions on 6.2(2002): 182-197. 5.
[7] Nemec, Marian, David W. Zingg, and Thomas H.Pulliam. "Multipoint and multi-objective aerody-namic shape optimization." AIAA journal 42, no.6 (2004): 1057-1065.
[8] Oyama, Akira, Taku Nonomura, and Kozo Fujii."Data mining of Pareto-optimal transonic airfoilshapes using proper orthogonal decomposition."Journal of Aircraft 47, no. 5 (2010): 1756-1762.
[9] Lane, Kevin A., and David D. Marshall. "Asurface parameterization method for airfoil op-timization and high Lift 2D geometries utilizingthe CST methodology." (2009): 1.
[10] Ceze, Marco, Marcelo Hayashi, and ErnaniVolpe. "A study of the CST parameterizationcharacteristics." 27th AIAA Applied Aerody-namics Conference. 2009
[11] Bogue, David, and Nick Crist. "CST TransonicOptimization Using Tranair++."AIAA 2008 321(2008).
[12] Lane, Kevin A. "Novel Inverse Airfoil DesignUtilizing Parametric Equations." (2010).
[13] Sobieczky, Helmut. "Parametric airfoils andwings." In Recent Development of AerodynamicDesign Methodologies, pp. 71-87. Vieweg+Teubner Verlag, 1999.
[14] Dodson, Michael, and Geoffrey T. Parks. "Ro-bust aerodynamic design optimization usingpolynomial chaos." Journal of Aircraft 46, no. 2(2009): 635-646.
[15] Constantine, Paul G., Michael S. Eldred, andEric T. Phipps. "Sparse pseudospectral approxi-mation method." Computer Methods in AppliedMechanics and Engineering 229 (2012): 1-12.
[16] Eldred, M. S., and John Burkardt. "Comparisonof non-intrusive polynomial chaos and stochas-tic collocation methods for uncertainty quan-tification." In Proceedings of the 47th AIAAAerospace Sciences Meeting and Exhibit, num-ber AIAA-2009-0976, Orlando, FL, vol. 123, p.124. 2009.
[17] Zhao, Liangyu, W. N. Dawes, GeoffreyParks, Jerome P. Jarrett, and Shuxing Yang."Robust airfoil design with respect to bound-ary layer transition." In Proceedings of 50thAIAA/ASME/ASCE/AHS/ASC Structures,
Structural Dynamics, and Materials Conference,vol. 4, no. 7. 2009.
Copyright Statement
The authors confirm that they, and/or their company or or-ganization, hold copyright on all of the original materialincluded in this paper. The authors also confirm that theyhave obtained permission, from the copyright holder of anythird party material included in this paper, to publish it aspart of their paper. The authors confirm that they give per-mission, or have obtained permission from the copyrightholder of this paper, for the publication and distribution ofthis paper as part of the ICAS 2014 proceedings or as indi-vidual off-prints from the proceedings.
12