multi-state system element pr{g x} element with total failure element with five different...
TRANSCRIPT
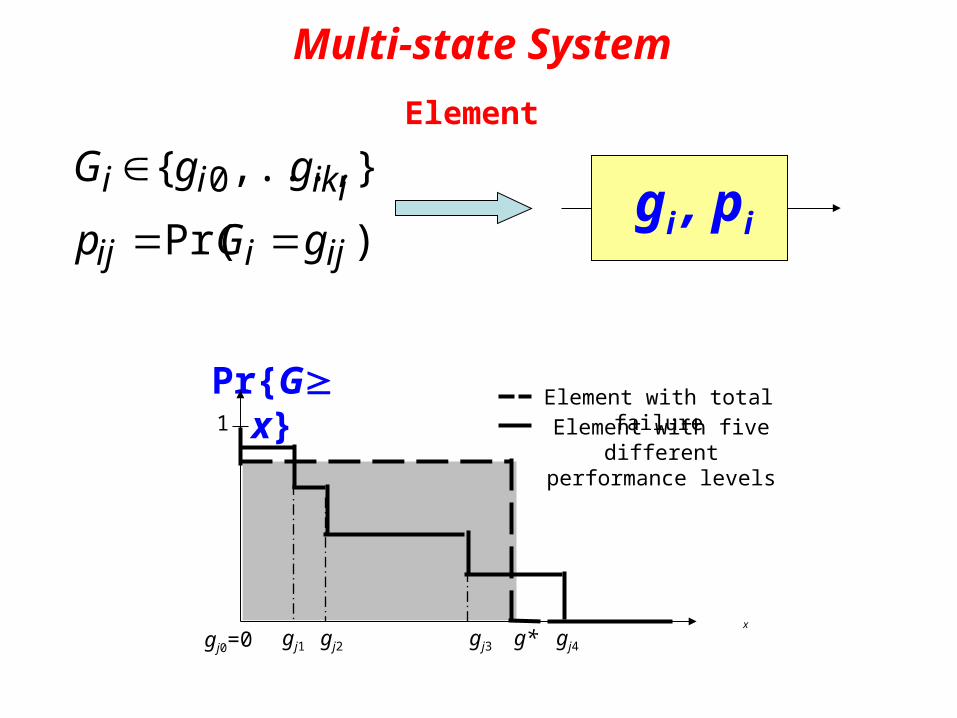
Multi-state System
),Pr(
},...,{ 0
ijiij
iikii
gGp
ggG
Element
Pr{Gx}
Element with total failure
Element with five different performance levels
g* gj4 gj3gj2gj1gj0=0x
1
gi , pi

Multi-state System
Combination of Elements
G

Multi-state System
Structure function
Gn
G2
G1
G G=(G1,G2,…,Gn
1 2
3
1
23
1
2 3
1 2
3 2
1
G=(G1, G2, G3min{G1+G2, G3}

Multi-state SystemGeneric Model
i=1,2,…,ngi , pi
G=(G1,G2,…,Gn
GnG2
G1
g, p
Acceptability Function
F(G,W (0,1
WG
WGWGWGF
,0
,1)(1),(
System reliability: R(W)=E(F(G,W
Pr{G>x}
W x
R(W)

SYSTEM PERFORMANCE MEASURESSYSTEM PERFORMANCE MEASURES
Average (expected) performance
Reliability
G
x
Pr{G>x}
Dem
and
Expected unsupplied
demand

SYSTEM PERFORMANCE MEASURESSYSTEM PERFORMANCE MEASURES
Average (expected) performance
Reliability
Expected unsupplied demand
GnG2
G1
g, p),Pr(
},...,{ 1
jj
k
gGp
ggG
Wjg
j
k
jjj pWgFpR
0),(
k
jjj gpE
0
)(
),0max(0
jWjg
j
k
jjj
gWp
gWp

)1('),(
)()()(),(
)),((
UWGF
zuzuzUWGF
WGFER
WF
G
uG(z)=0.6641z4+0.0657z1.5+0.2459z2.5+0.0243z0
W=2 uW(z)=1z2
F(G,W)=1(G W)
U(z)= 0.6641z1(42)+0.0657z1(1.52)+0.2459z1(2.52)+0.0243z1(02)
R = U’(1) = 0.66411(42)+0.06571(1.52)+0.24591(2.52)+0.02431(02) = 0.6641+0.2459 = 0.91
pmf of F(G,W):

Types of Multi-state SystemsSeries systems
2121
121
21
)/1/1(/1
GGGG
TTTG
TTT
),min( 21 GGG

Series systems
2121
121
21
)/1/1(/1
GGGG
TTTG
TTT
Functions in composition operators
1
1
11 )(
11
01
11 )1()}(),...,({)(
n
jjg
j
n
jj
n
jn zpzpzuzuzU
…
ngnn zpzpzU /0)1()( Identical elements:

Series systems
),min( 21 GGG
Functions in composition operators
…
Identical elements:
},...,min{1
1
01
11
111min
)1())(),...,(()( nggj
n
jj
n
jn zpzpzuzuzU
gnn zpzp 0)1(
11
01)1()( jg
jjj zpzpzu

gw ˆ
gw ˆ0
n
jjp
11
n
jjpgw
n
jjpgw
n
jjpw
11ˆ
11)ˆ()
111(
)1
11(
n
jjpw
n
jjpg
11ˆ
Series systemsPerformance measures
E(max(w-G,0))
0
},...,min{ˆ 111 nggg
n
jjgg
1
11/1ˆ
Processing speed:
Transmissioncapacity:

Types of Multi-state SystemsParallel systems
21 GGG
),max( 21 GGG
Flow dispersion
No flow dispersion
21 GGG
),max( 21 GGG
Work sharing
No work sharing

Parallel systems
21 GGG Flow dispersion
Functions in composition operators
n identical elements:
21112111
211121
11g2111
02111 )-(1)-(1)-)(1-(1)(
gggzppzppzppzppzU
n
k
kgknk zppknk
nzU
0)1(
)!(!
!)(
Flow dispersion 11
01)1()( jg
jjj zpzpzu

Flow transmission parallel systemsPerformance measures
w>g11+g210w-p11g11-p21g21
g21<w<g11+g21p11p21g11p11(p21-1)+g21p21(p11-1)+w(1-p11p21)
g11<w< g21p21(1-p21)(w-g11p11) p11g11+p21g21
0<w<g11p11+p21-p11p21(1-p11)(1-p21)w
11
01)1()( jg
jjj zpzpzu
E(max(w-G,0))

Parallel systems
),max( 21 GGG No work sharing
Functions in composition operators
gnn zpzpzU ))1(1()1()( 0 n identical elements:
.)(1))(1(1
)(1)(1))(1(1)(
21112111
2111
2121110
2111)max(
2111
112121110
2111
ggg,g
gg
zpzp-pzp-p-zpp
zp-pzp-pzp-p-zU
No work sharing 1
10
1)1()( jgjjj zpzpzu

Task processing parallel systemsPerformance measures
w>g21 0w-p11g11-p21g21+p11p21g11
g11<w g21 p21 (1-p21)(w-g11p11) p11(1-p21)g11+p21g21
0<wg11 p11+p21-p11p21 (1-p11)(1-p21)w
No work sharing 11
01)1()( jg
jjj zpzpzu
E(max(w-G,0))

Types of Multi-state SystemsSeries-parallel systems
Generalized RBD methodGeneralized RBD method
ser ser
serpar
ser par Usystem(z)

Types of Multi-state SystemsBridge systems
...Element
Component
1
2
3
45
... ...
br(G1, G2, G3, G4, G5) = min{G1,
G3}+min{G2, G4} + min{|G1 G3|, |G2 G4|, G5}1((G1 G3)(G2 G4)<0)
Flow dispersion No flow dispersion
br(G1, G2, G3, G4, G5) =max{min{G1,G3}
min{G2,G4}, min{G1,G5,G4}, min{G2,G5,G3}}

Types of Multi-state SystemsBridge systems
T = min{t1+t3, t2+t4, t1+t5+t4, t2+t5+t3}
br(G1, G2, G3, G4, G5) = 1/T
=max{ser(G1,G3),ser(G2,G4),
ser(G1,G4,G5),ser(G2,G3,G5))}
No work sharing Work sharing
br(G1, G2, G3, G4, G5) =/[(f+G5)+
(e+G5)]f = G4, e = G2 if (G2G1) (G3G4)f = G3, e = G1 if (G2G1) > (G3G4)
= G1G2+G1G5+G2G5
= G3G4+G3G5+G4G5

Types of Multi-state SystemsMSS with two failure modes
... ... ...... ...
Component mComponent 1 Component M
Element
Close
Open
Flow transmission (valves)
Task processing (switches)
R=1-0.5(Q0+Qc)

t1
t2
t1 t2
T=max(t1,t2)
Types of Multi-state SystemsMSS with two failure modes
Open Close
T=min(t1,t2)
T=min(t1,t2)
Open Close
T=max(t1,t2)

d1(I) d2(I) d3(I) d4(I) d5(I) d6(I)
w11 w1
2 w13 w1
4 w15 w1
6
I
D(I)
w01 w0
2 w03 w0
4 w05 w0
6
unit 1 unit 2 unit 3 unit 4 unit 5 unit 6
-system output (0,1,x)
-threshold
-voting units outputs )0,1,x(
-acceptance weights
-system input (0,1)
-rejection weights
Types of Multi-state SystemsWeighted voting systems

Example of Weighted Voting System
Undersea target detection system

r
k-out-of-r-from-n:
11,1
rnikg
ri
imm
nr
Types of Multi-state SystemsSliding window systems

r1=2, w1
r2=6, w2
r3=3, w3
g1 g2 g3 g4
Types of Multi-state SystemsMultiple sliding window systems
r1=3r2=5
G1 … …Gn

Linear
Circular
Types of Multi-state SystemsConsecutively connected systems

Single terminal
Types of Multi-state SystemsMulti-state networks
Multiple terminals
Tree structure
Node states

HardwareHardware SoftwareSoftware
SuccessSuccess
FailureFailure
InputInput
OutputOutput
Types of Multi-state SystemsSoftware systems

N-Version Programming
Fault-Tolerant Programming
Version 1
Version 2
Version N
…
Voter
M Identical Outputs
Correct Result
Failure
Recovery Blocks Scheme
Version 1 ATCorrect Result
+
-
Version 2 ATCorrect Result
+
-…
Version N ATCorrect Result
+
-Failure
Types of Multi-state Systems

t1+t3
1 3
2 4 512
3
4
5
3
21 5
43
12
5
4
Effect of Versions Sequencing
t2+t4+t5
t3+t4 t1+t2+t5
3-out-of-5 system
Fault-Tolerant Programming
Types of Multi-state Systems

Types of Multi-state SystemsMultiprocessor systems
…
SS
GG

Types of Multi-state SystemsGrid computing services
ResourceRMSRMS
Resource
Resource
Resource
Resource
Request for service
ResourceResource
Resource