multirobot coordination in usar katia sycara the robotics institute [email protected] softagents
Post on 21-Dec-2015
218 views
TRANSCRIPT

2
MotivationRate of
change of environment
is slow
No model of uncertainty due to uniqueness of disaster
Incident Commander provides initial map and goals (do ASAP)
3
Technical Challenges
• Joint goals require robots to work together• Heterogeneous multirobot task allocation• Robots must coordinate schedules• Additional system constraints• Communication failures• Need good allocation/schedule since
traveling is slow• Team must quickly react to discrepancies
in plan (interleaving planning & execution)
4
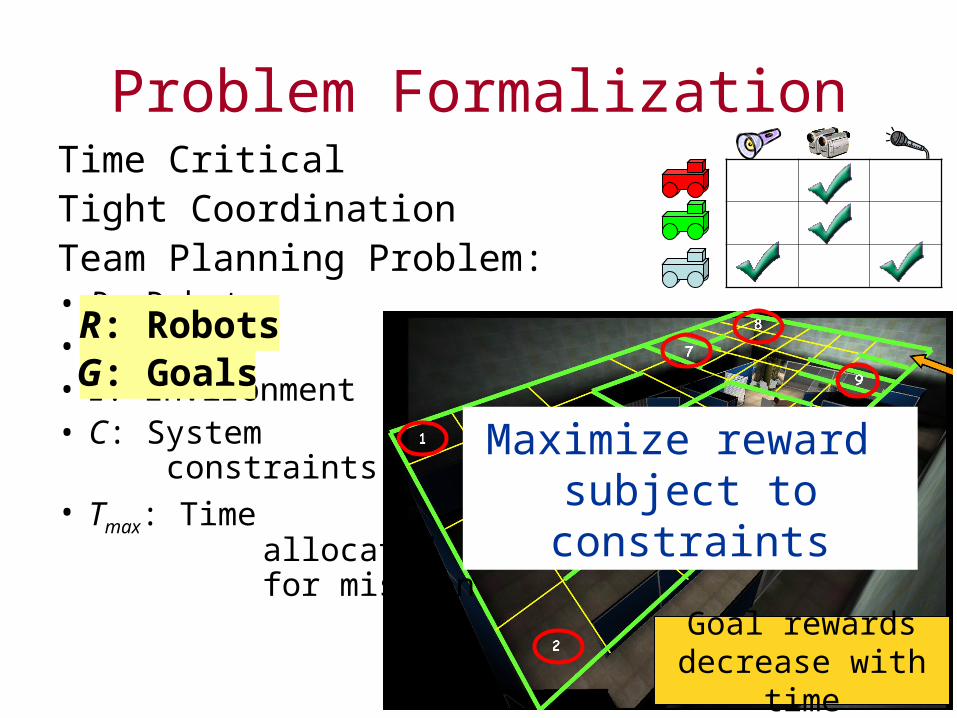
Problem FormalizationTime Critical Tight Coordination Team Planning Problem:• R: Robots • G: Goals• E: Environment• C: System
constraints• Tmax: Time
allocated for mission
R: RobotsG: Goals
Goal rewards decrease with time
Maximize reward subject to constraints
5
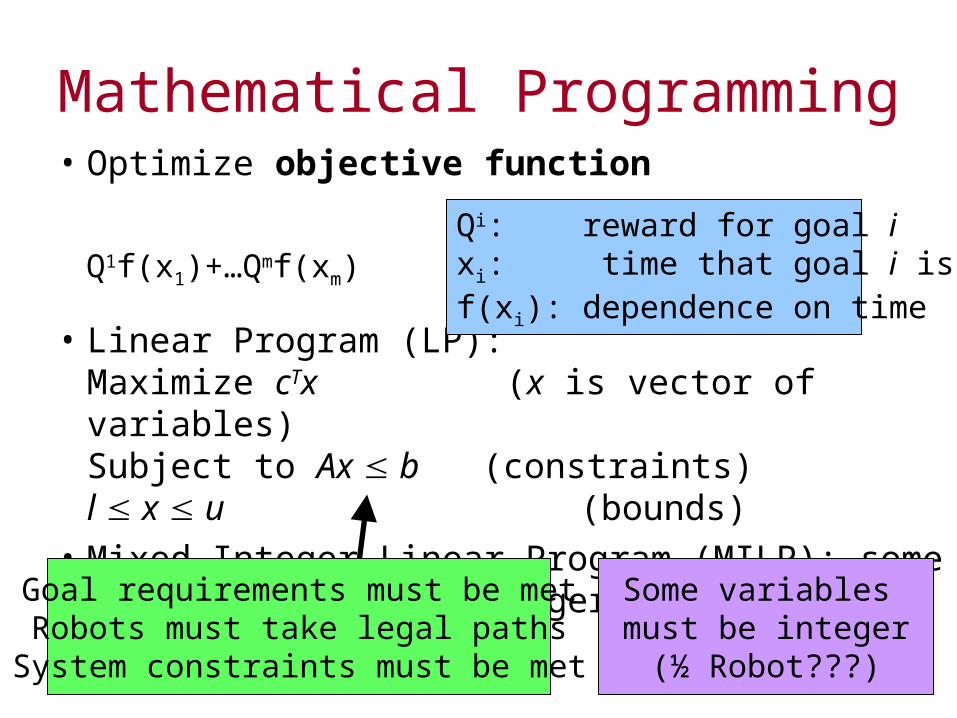
Mathematical Programming• Optimize objective function
• Linear Program (LP): Maximize cTx (x is vector of variables)Subject to Ax b (constraints)l x u (bounds)
• Mixed Integer Linear Program (MILP): some variables must be integer (much harder)
Q1f(x1)+…Qmf(xm)Qi: reward for goal ixi: time that goal i is donef(xi): dependence on time
Goal requirements must be metRobots must take legal paths
System constraints must be met
Some variables must be integer(½ Robot???)

6
Experimental Results
• Fractured Subteams• Dynamic Replanning
How much better is the anytime algorithm?
Number of goals
Anytime algorithm: Combination of MILPAnd heuristic
Koes, Nourbakhsh, Sycara, “Heterogeneous, Multi-robot coordination with Spatial and temporal constraints, AAAI-05, Pittsburgh, PA. July 2005.
7
Replanning with Fractured Subteams
Challenge: The “optimal” plan when replanning may fail since robots in other
fractured subteams follow initial plan
Our approach: Avoid changes to the schedule that affect robots in other
fractured subteams (especially short term)
8
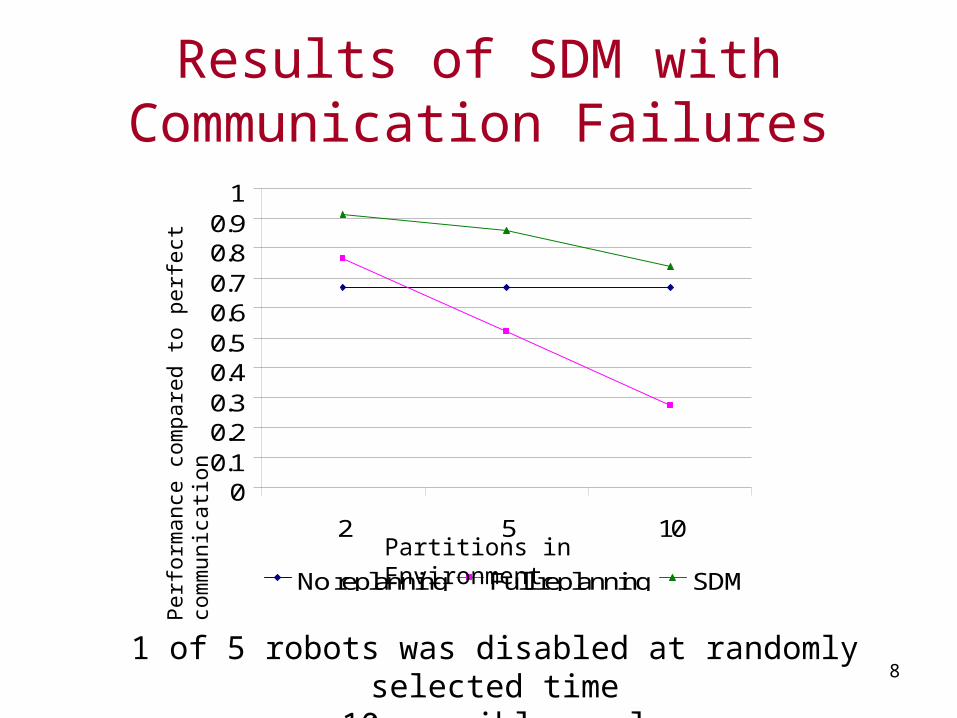
Results of SDM with Communication Failures
00.10.20.30.40.50.60.70.80.9
1
2 5 10
No replanning Full replanning SDM
Per
form
ance
com
pare
d to
per
fect
com
mun
icat
ion
Partitions in Environment
1 of 5 robots was disabled at randomly selected time 10 possible goals
9
10
Contributions
• General framework for coordination with multirobot task allocation, scheduling, system constraints
• Time critical tight coordination team planning problem (Multirobot/Time Extended)– Formalization– Benchmarks– Analysis
• System constraints: design & implementation• Fractured subteams model• Selective Disruption Minimization• Robust plan generation
11
Challenges of Large Scale Teams• Coordinate large number of UAVs in dynamic, open and
hostile environments– Limited communication channels– Local information– High uncertainty, high dynamics, complex environment– High “failure” rate– Impractical to centralize
• Maintaining team status model– Prohibitive volume of communication– Can we limit what needs to be known by others?
• New problems when knowledge is localized
• Existing approaches only work for small teams (10s)– Require accurate models of team activities or a centralized
information broker• Key coordination algorithms are typically NP-Complete
(or worse)– Can we build scalable, generic algorithms?
12
Results
Developed scalable algorithms for distributed and autonomous:
• Plan instantiation • Role allocation• Information sharing• Resource allocation• Sensor fusion• Recovering from faulty sensor readings• Tested in team of hundreds of agents
13
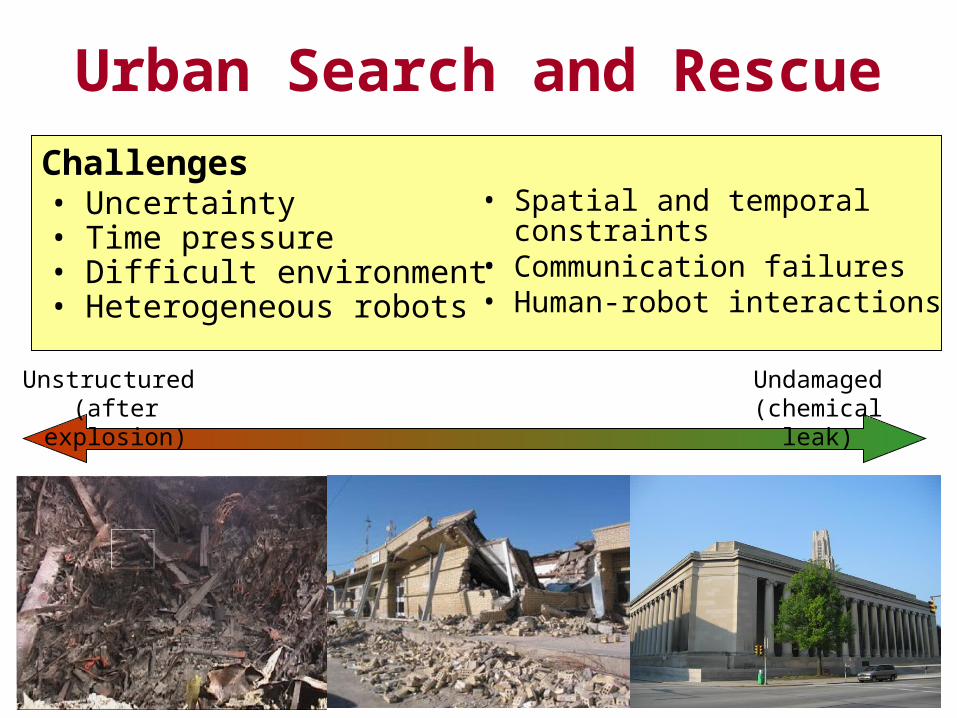
Challenges
Urban Search and Rescue
• Uncertainty• Time pressure• Difficult environment• Heterogeneous robots
• Spatial and temporal constraints
• Communication failures• Human-robot interactions
Unstructured (after explosion)
Undamaged(chemical leak)