notions de base sur le 2 - cache.industry.siemens.com · comptage, mesure et détection de position...
TRANSCRIPT

Comptage, mesure et détection de
position
___________________
___________________
___________ ___________________
___________________
___________________
SIMATIC
S7-1500, ET 200MP, ET 200SP Comptage, mesure et détection de position
Description fonctionnelle
02/2014 A5E32010205-AB
Préface
Guide de la documentation 1
Notions de base sur le comptage, la mesure et la détection de position
2
Utiliser High_Speed_Counter 3
Utiliser le module technologique
4
Service & Support A

Siemens AG Industry Sector Postfach 48 48 90026 NÜRNBERG ALLEMAGNE
A5E32010205-AB Ⓟ 03/2014 Sous réserve de modifications
Copyright © Siemens AG 2014. Tous droits réservés
Mentions légales Signalétique d'avertissement
Ce manuel donne des consignes que vous devez respecter pour votre propre sécurité et pour éviter des dommages matériels. Les avertissements servant à votre sécurité personnelle sont accompagnés d'un triangle de danger, les avertissements concernant uniquement des dommages matériels sont dépourvus de ce triangle. Les avertissements sont représentés ci-après par ordre décroissant de niveau de risque.
DANGER signifie que la non-application des mesures de sécurité appropriées entraîne la mort ou des blessures graves.
ATTENTION signifie que la non-application des mesures de sécurité appropriées peut entraîner la mort ou des blessures graves.
PRUDENCE signifie que la non-application des mesures de sécurité appropriées peut entraîner des blessures légères.
IMPORTANT signifie que la non-application des mesures de sécurité appropriées peut entraîner un dommage matériel.
En présence de plusieurs niveaux de risque, c'est toujours l'avertissement correspondant au niveau le plus élevé qui est reproduit. Si un avertissement avec triangle de danger prévient des risques de dommages corporels, le même avertissement peut aussi contenir un avis de mise en garde contre des dommages matériels.
Personnes qualifiées L’appareil/le système décrit dans cette documentation ne doit être manipulé que par du personnel qualifié pour chaque tâche spécifique. La documentation relative à cette tâche doit être observée, en particulier les consignes de sécurité et avertissements. Les personnes qualifiées sont, en raison de leur formation et de leur expérience, en mesure de reconnaître les risques liés au maniement de ce produit / système et de les éviter.
Utilisation des produits Siemens conforme à leur destination Tenez compte des points suivants:
ATTENTION Les produits Siemens ne doivent être utilisés que pour les cas d'application prévus dans le catalogue et dans la documentation technique correspondante. S'ils sont utilisés en liaison avec des produits et composants d'autres marques, ceux-ci doivent être recommandés ou agréés par Siemens. Le fonctionnement correct et sûr des produits suppose un transport, un entreposage, une mise en place, un montage, une mise en service, une utilisation et une maintenance dans les règles de l'art. Il faut respecter les conditions d'environnement admissibles ainsi que les indications dans les documentations afférentes.
Marques de fabrique Toutes les désignations repérées par ® sont des marques déposées de Siemens AG. Les autres désignations dans ce document peuvent être des marques dont l'utilisation par des tiers à leurs propres fins peut enfreindre les droits de leurs propriétaires respectifs.
Exclusion de responsabilité Nous avons vérifié la conformité du contenu du présent document avec le matériel et le logiciel qui y sont décrits. Ne pouvant toutefois exclure toute divergence, nous ne pouvons pas nous porter garants de la conformité intégrale. Si l'usage de ce manuel devait révéler des erreurs, nous en tiendrons compte et apporterons les corrections nécessaires dès la prochaine édition.

Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 3
Préface
Objet de cette documentation Cette documentation vous aide à configurer et à programmer les modules technologiques pour les tâches de comptage et de mesure des S7-1500, ET 200MP et ET 200SP ainsi que pour la détection de position.
Connaissances de base requises Pour bien exploiter les informations contenues dans cette documentation, les connaissances suivantes sont nécessaires :
● Connaissances générales en technique d'automatisation
● Connaissances de l'automate programmable industriel SIMATIC
● Connaissances sur l'utilisation d'ordinateurs sous Windows
● Connaissances dans l'utilisation de STEP 7
Domaine de validité de la documentation Cette documentation sert à utiliser les modules technologiques TM Count 2x24V et TM PosInput 2 du S7-1500 et des modules technologiques correspondants de l'ET 200SP.
Conventions Tenez compte des remarques identifiées de la façon suivante :
Remarque
Un nota contient des informations importantes sur le produit décrit dans la documentation, sur la manipulation du produit ou sur la partie de la documentation qu'il faut particulièrement mettre en relief.
Aide supplémentaire ● Vous trouverez des informations complémentaires sur l'assistance technique en annexe
Service & Support (Page 155).
● L'offre de documentation technique pour les produits et systèmes d'automatisation SIMATIC respectifs est disponible sur Internet (http://www.siemens.com/simatic-tech-doku-portal).
● Vous trouverez le catalogue en ligne et le système de commande en ligne sur Internet (http://mall.automation.siemens.com).

Préface
Comptage, mesure et détection de position 4 Description fonctionnelle, 02/2014, A5E32010205-AB
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 5
Sommaire
Préface ...................................................................................................................................................... 3
1 Guide de la documentation ........................................................................................................................ 9
2 Notions de base sur le comptage, la mesure et la détection de position .................................................. 11
2.1 Vue d'ensemble des modules technologiques et des propriétés ................................................ 11
2.2 Vue d'ensemble des utilisations possibles................................................................................... 13
2.3 Détection de signaux de comptage ............................................................................................. 15 2.3.1 Comptage avec codeur incrémental ou générateur d'impulsions ................................................ 15 2.3.2 Détection de position avec codeur absolu SSI ............................................................................ 17
2.4 Réaction aux limites de comptage ............................................................................................... 18
2.5 Commande par validation avec codeur incrémental ou générateur d'impulsions ....................... 20 2.5.1 Validation logicielle ...................................................................................................................... 20 2.5.2 Validation matérielle ..................................................................................................................... 20 2.5.3 Validation interne ......................................................................................................................... 21 2.5.4 Réaction du compteur au début de validation ............................................................................. 22
2.6 Capture ........................................................................................................................................ 23 2.6.1 Capture avec codeur incrémental ou générateur d'impulsions .................................................... 23 2.6.2 Capture avec codeur absolu SSI ................................................................................................. 25
2.7 Synchronisation............................................................................................................................ 27 2.7.1 Synchronisation par entrée TOR ................................................................................................. 30 2.7.2 Synchronisation en cas de signal N ............................................................................................. 32
2.8 Valeurs de comparaison .............................................................................................................. 35 2.8.1 Valeurs de comparaison et sorties .............................................................................................. 35 2.8.2 Commutation liée à des valeurs de comparaison en mode de fonctionnement "Comptage" ...... 36 2.8.2.1 Commutation liée à des valeurs de comparaison avec codeur incrémental ou générateur
d'impulsions ................................................................................................................................. 36 2.8.2.2 Commutation liée à des valeurs de comparaison avec codeur absolu SSI ................................ 40 2.8.3 Commutation liée à des valeurs de comparaison en mode de fonctionnement "Mesure" .......... 44
2.9 Détermination de valeur de mesure ............................................................................................. 46 2.9.1 Vue d'ensemble des fonctions de mesure ................................................................................... 46 2.9.2 Détermination de valeur de mesure avec codeur incrémental ou générateur d'impulsions ........ 47 2.9.2.1 Plages de mesure ........................................................................................................................ 47 2.9.2.2 Intervalle de mesure .................................................................................................................... 48 2.9.2.3 Types de mesure ......................................................................................................................... 49 2.9.3 Détermination de valeur de mesure avec codeur absolu SSI ..................................................... 51 2.9.3.1 Plages de mesure ........................................................................................................................ 51 2.9.3.2 Intervalle de mesure .................................................................................................................... 51 2.9.3.3 Types de mesure ......................................................................................................................... 52
2.10 Hystérésis .................................................................................................................................... 54 2.10.1 Hystérésis avec codeur incrémental ou générateur d'impulsions................................................ 54 2.10.2 Hystérésis avec codeur absolu SSI ............................................................................................. 56

Sommaire
Comptage, mesure et détection de position 6 Description fonctionnelle, 02/2014, A5E32010205-AB
2.11 Alarmes ....................................................................................................................................... 58
2.12 Détection de position pour Motion Control .................................................................................. 58
2.13 Signaux de capteur ..................................................................................................................... 59 2.13.1 Signaux de comptage 24 V et TTL ............................................................................................. 59 2.13.2 Signaux de comptage RS422 ..................................................................................................... 62 2.13.3 Signaux SSI ................................................................................................................................ 64
2.14 Evaluation des signaux d'incrémentation .................................................................................... 65 2.14.1 Vue d'ensemble ........................................................................................................................... 65 2.14.2 Exploitation simple ...................................................................................................................... 65 2.14.3 Exploitation double ...................................................................................................................... 66 2.14.4 Exploitation quadruple ................................................................................................................. 67
2.15 Mode synchrone .......................................................................................................................... 68
3 Utiliser High_Speed_Counter ................................................................................................................... 69
3.1 Objet technologique High_Speed_Counter ................................................................................. 69
3.2 Vue d'ensemble des étapes de configuration ............................................................................. 70
3.3 Ajouter l'objet technologique ....................................................................................................... 71
3.4 Configurer High_Speed_Counter ................................................................................................ 73 3.4.1 Travailler avec la boîte de dialogue de configuration ................................................................. 73 3.4.2 Paramètres de base .................................................................................................................... 75 3.4.3 Entrées de comptage .................................................................................................................. 76 3.4.3.1 Spécifier les signaux d'entrée/le type de codeur ........................................................................ 76 3.4.3.2 Autres paramètres ....................................................................................................................... 77 3.4.4 Réaction du compteur ................................................................................................................. 81 3.4.4.1 Limites de comptage et valeur initiale ......................................................................................... 81 3.4.4.2 Réaction du compteur aux limites et au début de la validation ................................................... 81 3.4.5 Réaction d'une entrée TOR ........................................................................................................ 83 3.4.5.1 Fonction d'une entrée TOR ......................................................................................................... 83 3.4.5.2 Options des fonctions .................................................................................................................. 85 3.4.6 Fonction d'une sortie TOR (DQ) ................................................................................................. 87 3.4.7 Hystérésis.................................................................................................................................... 89 3.4.8 Spécifier la valeur de mesure...................................................................................................... 89
3.5 Programmer High_Speed_Counter ............................................................................................. 91 3.5.1 Instruction High_Speed_Counter ................................................................................................ 91 3.5.2 Appeler l'instruction dans le programme utilisateur .................................................................... 92 3.5.3 Description de High_Speed_Counter .......................................................................................... 93 3.5.4 Paramètres d'entrée de High_Speed_Counter ........................................................................... 97 3.5.5 Paramètres de sortie de High_Speed_Counter .......................................................................... 98 3.5.6 Paramètre ErrorID ..................................................................................................................... 100 3.5.7 Variables statiques de High_Speed_Counter ........................................................................... 101
3.6 Mise en service de High_Speed_Counter ................................................................................. 103 3.6.1 Mettre l'objet technologique en service ..................................................................................... 103
3.7 Diagnostic de High_Speed_Counter ......................................................................................... 105 3.7.1 Observer les valeurs de comptage, de mesure, les entrées (DI) et sorties TOR (DQ) ............ 105

Sommaire
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 7
4 Utiliser le module technologique ............................................................................................................ 107
4.1 Configurer le module .................................................................................................................. 107 4.1.1 Ajouter un module technologique à la configuration matérielle ................................................. 107 4.1.2 Paramètres de base ................................................................................................................... 109 4.1.2.1 Réaction à un arrêt de la CPU ................................................................................................... 109 4.1.2.2 Alarmes de diagnostic ................................................................................................................ 110 4.1.2.3 Mode de fonctionnement ........................................................................................................... 111 4.1.2.4 Paramètres de module (détection de position pour Motion Control) ......................................... 112 4.1.2.5 Alarmes de processus ............................................................................................................... 114
4.2 Paramétrer le module ................................................................................................................ 117 4.2.1 Possibilités du paramétrage ....................................................................................................... 117 4.2.2 Ouvrir le paramétrage (HW Config) ........................................................................................... 119 4.2.3 Mode de fonctionnement Mesure .............................................................................................. 119 4.2.3.1 Vue d'ensemble ......................................................................................................................... 119 4.2.3.2 Entrées de comptage : Spécifier les signaux d'entrée/le type de codeur (mode de
fonctionnement "Mesure") .......................................................................................................... 120 4.2.3.3 Entrées de comptage : Autres paramètres (mode de fonctionnement "Mesure") ..................... 121 4.2.3.4 Comportement d'une entrée TOR (DI) : Fonction d'une entrée TOR (DI) (mode de
fonctionnement "Mesure") .......................................................................................................... 124 4.2.3.5 Comportement d'une entrée TOR (DI) : Options des fonctions (mode de fonctionnement
"Mesure") ................................................................................................................................... 126 4.2.3.6 Fonction d'une sortie TOR (mode de fonctionnement Mesure) ................................................. 127 4.2.4 Paramétrer la détection de position avec codeur absolu SSI .................................................... 129 4.2.4.1 Vue d'ensemble ......................................................................................................................... 129 4.2.4.2 Entrées de comptage : Spécifier les signaux d'entrée/le type de codeur (SSI) ......................... 129 4.2.4.3 Entrées de comptage : Autres paramètres (SSI) ....................................................................... 130 4.2.4.4 Comportement d'une entrée TOR (DI) : Fonction d'une entrée TOR (DI) (SSI, mode de
fonctionnement "Comptage") ..................................................................................................... 133 4.2.4.5 Comportement d'une entrée TOR (DI) : Fonction d'une entrée TOR (DI) (SSI, mode de
fonctionnement "Mesure") .......................................................................................................... 134 4.2.4.6 Comportement d'une entrée TOR (DI) : Options des fonctions (SSI) ....................................... 135 4.2.4.7 Comportement d'une sortie TOR (DQ) : Fonction d'une sortie TOR (DQ) (SSI, mode de
fonctionnement "Comptage") ..................................................................................................... 135 4.2.4.8 Comportement d'une sortie TOR (DQ) : Fonction d'une sortie TOR (DQ) (SSI, mode de
fonctionnement "Mesure") .......................................................................................................... 137 4.2.4.9 Hystérésis (SSI) ......................................................................................................................... 137 4.2.4.10 Spécifier la valeur de mesure (SSI) ........................................................................................... 137 4.2.4.11 Exemples de structure du télégramme ...................................................................................... 139
4.3 Module En ligne & Diagnostic .................................................................................................... 142 4.3.1 Affichage et exploitation de diagnostic ...................................................................................... 142
4.4 Mise en service du module ........................................................................................................ 143 4.4.1 Observer les valeurs de comptage, de mesure, les entrées (DI) et sorties TOR (DQ) ............. 143 4.4.2 Commande manuelle des valeurs de comptage, entrées TOR et sorties TOR ........................ 145
4.5 Interface de commande et de compte rendu ............................................................................. 147 4.5.1 Affectation de l'interface de commande ..................................................................................... 147 4.5.2 Affectation de l'interface de compte-rendu ................................................................................ 150
A Service & Support .................................................................................................................................. 155
Index ...................................................................................................................................................... 159

Sommaire
Comptage, mesure et détection de position 8 Description fonctionnelle, 02/2014, A5E32010205-AB

Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 9
Guide de la documentation 1
Introduction La documentation des produits SIMATIC est de conception modulaire et traite des thèmes touchant à votre système d'automatisation.
La documentation complète relative aux systèmes S7-1500, ET 200MP et ET 200SP se compose des manuels système, des descriptions fonctionnelles et des manuels.
En outre, le système d'information de STEP 7 (TIA Portal) vous aidera à configurer et à programmer votre système d'automatisation.
Vue d'ensemble de la documentation concernant le comptage, la mesure et la détection de position Le tableau suivant contient d'autres documentations qui viennent compléter le présent descriptif du comptage, de la mesure et de la détection de position.
Tableau 1- 1 Documentation concernant le comptage, la mesure et la détection de position
Sujet Documentation Contenus les plus importants STEP 7 (TIA Portal) Aide en ligne pour STEP 7 Configuration et programmation
avec le logiciel d'ingénierie Description du système
Manuel système Système d'automatisation S7-1500 (http://support.automation.siemens.com/WW/view/fr/59191792)
• Planification de l'utilisation • Montage • Connexion • Mise en service Manuel système
Système de périphérie décentralisé ET 200MP (http://support.automation.siemens.com/WW/view/fr/59193214) Manuel système Système de périphérie décentralisé ET 200SP (http://support.automation.siemens.com/WW/view/fr/58649293)
TM Manuel Module technologique TM Count 2x24V (http://support.automation.siemens.com/WW/view/fr/59193105)
• Connexion • Alarmes et messages de
diagnostic • Enregistrements des
paramètres • Caractéristiques techniques • Schéma coté
Manuel Module technologique TM PosInput 2 (http://support.automation.siemens.com/WW/view/fr/61777657)
Guide de la documentation
Comptage, mesure et détection de position 10 Description fonctionnelle, 02/2014, A5E32010205-AB
Sujet Documentation Contenus les plus importants Motion Control Description fonctionnelle
S7-1500 Motion Control (http://support.automation.siemens.com/WW/view/fr/59381279)
• Configuration • Programmation • Mise en service • Diagnostic
Manuels SIMATIC Toutes les dernières versions en date des manuels des produits SIMATIC sont téléchargeables gratuitement sur Internet (http://www.siemens.com/automation/service&support).

Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 11
Notions de base sur le comptage, la mesure et la détection de position 2 2.1 Vue d'ensemble des modules technologiques et des propriétés
Modules technologiques Le tableau suivant présente un aperçu des caractéristiques des modules technologiques pour le comptage, la mesure et la détection de position :
Tableau 2- 1 Modules technologiques pour le comptage, la mesure et la détection de position
Propriété S7-1500 ET 200SP
TM Count 2x24V TM PosInput 2 TM Count 1x24V TM PosInput 1 Nombre de voies 2 2 1 1 Fréquence max. de signal 200 kHz 1 MHz 200 kHz 1 MHz Fréquence max. de comptage pour codeur incrémental avec quadruple évaluation
800 kHz 4 MHz 800 kHz 4 MHz
Plage max. de valeur de comptage/de position
32 Bit 32 Bit/31 Bit 32 Bit 32 Bit/31 Bit
Raccordement du codeur incrémental et générateur d'impulsions RS422/TTL
— X — X
Raccordement du codeur incrémental et générateur d'impulsions 24 V
X — X —
Raccordement codeur absolu SSI
— X — X
Alimentation du capteur 5 V
— X — —
Alimentation du capteur 24 V
X X X X
Nombre d'entrées TOR par voie
3 2 3 2
Nombre de sorties TOR par voie
2 2 2 2
Commande par validation X X X X Fonction Capture X X X X Synchronisation X X X X Fonctions de comparaison X X X X Mesure de la fréquence, de la vitesse et de la période
X X X X

Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 12 Description fonctionnelle, 02/2014, A5E32010205-AB
Propriété S7-1500 ET 200SP
TM Count 2x24V TM PosInput 2 TM Count 1x24V TM PosInput 1 Prise en charge du mode synchrone
X X X X
Prise en charge des alarmes de diagnostic
X X X X
Prise en charge des alarmes de processus
X X X X
Filtre paramétrable pour signaux de comptage et entrées TOR
X X X X

Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 13
2.2 Vue d'ensemble des utilisations possibles
Introduction La configuration et le paramétrage du module technologique se font avec le logiciel de configuration.
La commande et le contrôle des fonctions du module technologique s'effectuent via le programme utilisateur.
Environnement système Les modules technologiques peuvent être utilisés dans les environnements système suivants :
Utilisations possibles Composants requis Logiciel de configuration Dans le programme
utilisateur Exploitation centralisée et décentralisée dans un système S7-1500 avec le système ET 200 correspondant
• Système d'automatisation S7-1500
• Système de périphérie décentralisé ET 200
• Module technologique
STEP 7 (TIA-Portal) : • Configuration de
l'appareil avec la configuration matérielle (HWCN)
• Paramétrage avec l'objet technologique High_Speed_Counter
Fonctions de comptage et de mesure : Instruction High_Speed_Counter de l'objet technologique Détection de position avec codeur absolu SSI : Accès direct à l'interface de commande et de compte-rendu du module technologique dans les données IO
STEP 7 (TIA-Portal) : Configuration de l'appareil avec la configuration matérielle (HWCN) en mode de fonctionnement "Détection de position pour Motion Control"
Commande avec l'objet technologique

Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 14 Description fonctionnelle, 02/2014, A5E32010205-AB
Utilisations possibles Composants requis Logiciel de configuration Dans le programme utilisateur
Exploitation décentralisée dans un système S7-300/400
• Système d'automatisation S7-300/400
• Système de périphérie décentralisé ET 200
• Module technologique
STEP 7 (TIA-Portal) : Configuration de l'appareil et paramétrage avec la configuration matérielle (HWCN) STEP 7: Configuration des appareils et réglage des paramètres avec HSP
Accès direct à l'interface de commande et de compte rendu du module technologique dans les données IO
Exploitation décentralisée dans un système d'autres fabricants
• Systèmes d'automatisation d'autres fabricants
• Système de périphérie décentralisé ET 200
• Module technologique
Logiciel de configuration d'autres fabricants : Configuration de l'appareil et paramétrage avec le fichier GSD
Accès direct à l'interface de commande et de compte rendu du module technologique dans les données IO
Possibilités du paramétrage Deux options s'offrent à vous pour le paramétrage et la commande des fonctions du module technologique dans un système S7-1500 :
● Configuration via l'objet technologique High_Speed_Counter et commande via l'instruction correspondante High_Speed_Counter L'accès à l'interface de commande et de compte rendu du module technologique s'effectue au moyen de l'objet technologique.
● Paramétrage via HWCN L'accès à l'interface de commande et de compte rendu du module technologique s'effectue par l'accès direct aux données IO.
Configuration par objet technologique Pour une utilisation centralisée et décentralisée dans un système S7-1500, nous recommandons la configuration conviviale et graphique via un objet technologique High_Speed_Counter. Vous trouverez la description détaillée de cette configuration au paragraphe Objet technologique High_Speed_Counter (Page 69). Lors de la configuration de l'appareil, définissez l'"exploitation avec objet technologique" pour le module technologique : voir paragraphe Mode de fonctionnement (Page 111). Pour les paramètres de base de l'objet technologique, procédez à l'affectation au module technologique et à la voie de comptage : voir paragraphe Paramètres de base (Page 75).
Paramétrage via HW Config Pour plus d'aide sur le paramétrage avec HW Config, référez-vous à l'aide contextuelle des paramètres dans STEP 7 (TIA-Portal). L'interface de commande et de compte rendu est décrite aux paragraphes suivants : Affectation de l'interface de commande (Page 147) Affectation de l'interface de compte-rendu (Page 150)

Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 15
2.3 Détection de signaux de comptage
2.3.1 Comptage avec codeur incrémental ou générateur d'impulsions Le comptage consiste à acquérir et totaliser des événements. Les compteurs des modules technologiques acquièrent des signaux d'impulsion et d'incrémentation et les évaluent de manière appropriée. Le sens de comptage peut être prédéfini par des signaux de codeur ou d'impulsion appropriés ou via le programme utilisateur.
Les entrées TOR du module technologique permettent de commander les processus de comptage. Vous pouvez commuter les sorties TOR exactement aux valeurs de comptage définies indépendamment du programme utilisateur.
Le comportement des compteurs peut être paramétré à l'aide des fonctions décrites ci-après.
Limites de comptage Les limites de comptage définissent la plage des valeurs de comptage utilisée. Elles sont paramétrables et peuvent être modifiées via le programme utilisateur au moment de l'exécution.
La limite de comptage maximale pouvant être réglée s'élève à 2147483647 (231–1). La limite de comptage minimale pouvant être réglée s'élève à –2147483648 (–231).
Le comportement du compteur peut être paramétré aux limites de comptage :
● Poursuite ou interruption des processus de comptage en cas de dépassement d'une limite de comptage (fin automatique de validation)
● Remise à la valeur initiale ou à l'autre limite de comptage d'une valeur de comptage en cas de dépassement d'une limite de comptage
Valeur initiale Une valeur initiale peut être paramétrée dans la plage des limites de comptage. La valeur initiale peut être modifiée via le programme utilisateur au moment de l'exécution.
Le module technologique peut, selon le paramétrage, mettre la valeur actuelle de comptage à la valeur initiale lors de la synchronisation, de l'exécution de la fonction de Capture, en cas de dépassement d'une limite de comptage ou lorsque la validation est donnée.
Commande par validation La mise à 1 et à 0 de la validation matérielle et de la validation logicielle détermine l'intervalle de temps pendant lequel les signaux de comptage sont acquis.
La commande de la validation matérielle s'effectue en externe via une entrée TOR du module technologique. La commande de la validation logicielle s'effectue via le programme utilisateur. La validation matérielle peut être activée par paramétrage. La validation logicielle (bit de l'interface de commande des données IO cycliques) ne peut pas être désactivée.

Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 16 Description fonctionnelle, 02/2014, A5E32010205-AB
Capture Il est possible de paramétrer le front d'un signal de référence externe qui déclenche un enregistrement de la valeur actuelle de comptage ou de la valeur de position sous forme de valeur Capture. Les signaux externes suivants peuvent déclencher la fonction de Capture :
● Front montant ou descendant d'une entrée TOR
● Les deux fronts d'une entrée TOR
● Front montant du signal N à l'entrée du codeur (pour codeur incrémental et générateur d'impulsions)
Pour les codeurs incrémentaux et les générateurs d'impulsions, vous pouvez paramétrer si la poursuite du comptage doit s'effectuer avec la valeur actuelle de comptage ou avec la valeur initiale dans la foulée de l'exécution de la fonction de Capture.
Synchronisation Vous pouvez paramétrer le front d'un signal de référence externe qui charge la valeur initiale indiquée dans le compteur. Les signaux externes suivants peuvent charger la valeur initiale dans le compteur :
● Front montant ou descendant d'une entrée TOR
● Front montant du signal N à l'entrée du codeur
● Front montant du signal N à l'entrée du codeur en fonction du niveau de l'entrée TOR affectée
Hystérésis Pour les valeurs de comparaison, vous pouvez définir une hystérésis au sein de laquelle la nouvelle commutation d'une sortie TOR est empêchée. Un codeur peut en effet s'arrêter à une certaine position et la valeur de comptage osciller autour de cette position en raison de mouvements minimes. Si une valeur de comparaison ou une limite de comptage se situe dans cette plage d'oscillation, la sortie TOR concernée sera en conséquence très souvent activée et désactivée, en cas de non-utilisation d'hystérésis. L'hystérésis empêche ces commutations indésirables.

Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 17
2.3.2 Détection de position avec codeur absolu SSI
Description Vous pouvez utiliser les modules technologiques TM PosInput avec un codeur absolu SSI pour détecter la position. Le module technologique lit la valeur de position via une interface série synchrone du codeur absolu SSI et la met à disposition de l'automate.
Vous pouvez commuter les sorties TOR du module technologique exactement aux valeurs de position définies indépendamment du programme utilisateur. La détection de position avec un codeur absolu SSI s'effectue sans commande par validation. Une synchronisation n'est pas possible avec un codeur absolu SSI du fait du système.
Dans le paramétrage (HWCN) du module technologique dans STEP 7 (TIA-Portal), sélectionnez à cet effet le type de signal "Codeur absolu (SSI)".
Conversion de code de Gray en code binaire Les codeurs absolus SSI codés en Gray et en binaire sont pris en charge.
Capture Vous pouvez paramétrer un front d'une entrée TOR ou les deux fronts, qui déclenche(nt) un enregistrement de la valeur de position actuelle sous forme de valeur Capture.
Hystérésis Pour les valeurs de comparaison, vous pouvez définir une hystérésis au sein de laquelle la nouvelle commutation d'une sortie TOR est empêchée. Un codeur peut en effet s'arrêter à une certaine position et la valeur de position oscille autour de cette position par des mouvements minimes. Lorsqu'une valeur de comparaison ou une limite se situe dans cette plage d'oscillation, la sortie TOR concernée est en conséquence souvent activée et désactivée si une hystérésis n'est pas utilisée. L'hystérésis empêche ces commutations indésirables.
Plage pour la valeur de position Vous pouvez définir une longueur de télégramme de 10 bits à 40 bits pour le codeur absolu SSI. Les numéros de bit paramétrables du LSB et du MSB de la valeur de position dans le télégramme définissent la plage de valeurs. Le module technologique peut lire et transmettre à l'automate une valeur de position d'une longueur de 31 bits maximum. La valeur de position est traitée sans signe comme une valeur positive et peut accepter des valeurs comprises entre "0" et "2(MSB-LSB+1)-1".
Télégramme SSI complet Vous pouvez vous faire retourner les 32 bits de poids faible du télégramme SSI actuel non traité en lieu et place d'une grandeur de mesure. Ce faisant, vous recevez des bits supplémentaires spécifiques au codeur, tels que des bits d'erreur, en plus de la valeur de position. Si le télégramme SSI est plus court que 32 bits, le télégramme SSI complet est retourné, à droite dans l'interface de compte-rendu et les bits supérieurs non utilisés sont retournés avec "0".

Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 18 Description fonctionnelle, 02/2014, A5E32010205-AB
2.4 Réaction aux limites de comptage
Dépassement d'une limite de comptage La limite supérieure de comptage est dépassée si la valeur actuelle de comptage correspond à cette limite et qu'une autre impulsion de comptage arrive dans le sens de comptage. La limite inférieure de comptage est dépassée si la valeur actuelle de comptage correspond à cette limite et qu'une autre impulsion de comptage arrive dans le sens de décomptage.
Le bit d'état correspondant est mis à 1 dans l'interface de compte-rendu lors du dépassement.
Limite de comptage dépassée Bit d'état Limite supérieure de comptage EVENT_OFLW est mis à 1 Limite inférieure de comptage EVENT_UFLW est mis à 1
Vous pouvez réinitialiser le bit d'état avec RES_EVENT.
Vous pouvez paramétrer si le comptage doit se poursuivre ou non et avec quelle valeur pour le dépassement d'une limite de comptage.
Exemples La figure suivante montre un exemple de processus de comptage arrêté (fin automatique de validation) après un débordement et le réglage du compteur à la valeur initiale :
Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 19
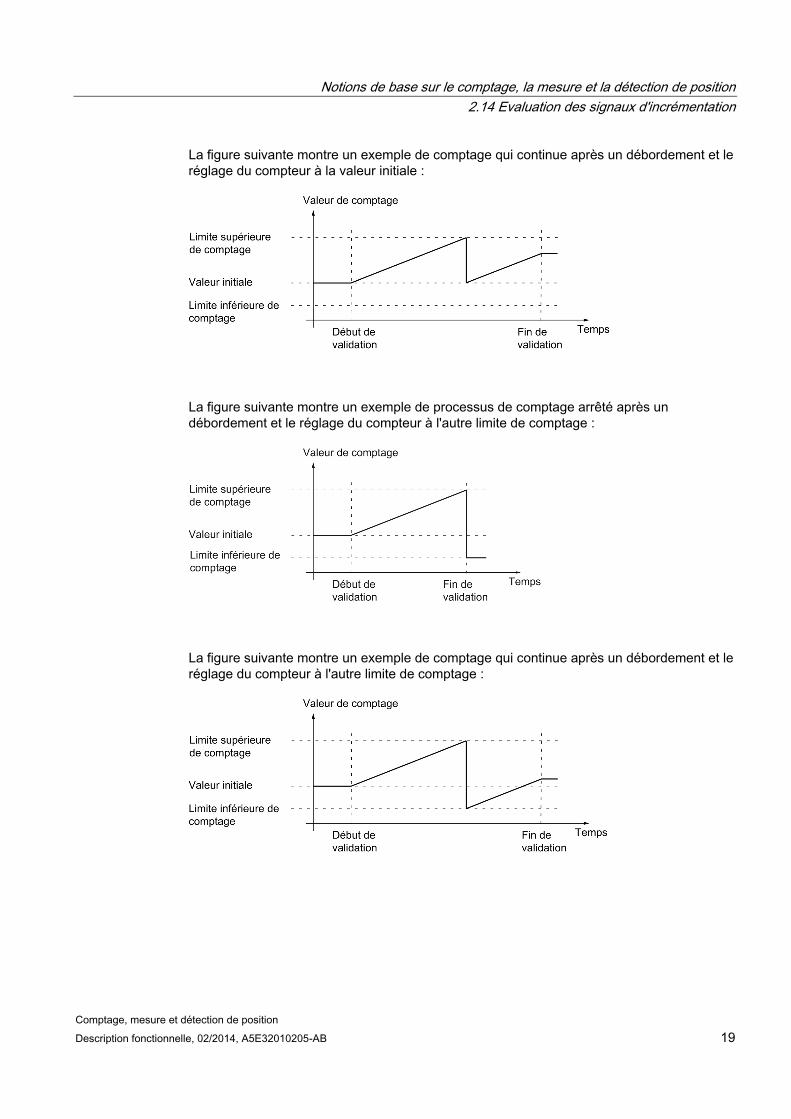
La figure suivante montre un exemple de comptage qui continue après un débordement et le réglage du compteur à la valeur initiale :
La figure suivante montre un exemple de processus de comptage arrêté après un débordement et le réglage du compteur à l'autre limite de comptage :
La figure suivante montre un exemple de comptage qui continue après un débordement et le réglage du compteur à l'autre limite de comptage :

Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 20 Description fonctionnelle, 02/2014, A5E32010205-AB
2.5 Commande par validation avec codeur incrémental ou générateur d'impulsions
De nombreuses applications exigent que le démarrage ou l'arrêt du comptage dépende d'autres événements. Ce démarrage et cet arrêt du comptage s'effectuent via la fonction de validation.
Les modules technologiques comptent deux validations par voie, qui déterminent la validation interne qui en résulte :
● Validation logicielle
● Validation matérielle
2.5.1 Validation logicielle Vous donnez et retirez la validation logicielle de la voie avec le bit de commande (Page 147) SW_GATE. L'état de la validation logicielle est indiqué par le bit d'information en retour (Page 150) STS_SW_GATE.
2.5.2 Validation matérielle La validation matérielle est optionnelle. Vous donnez et retirez la validation matérielle via des signaux aux entrées TOR paramétrées de la voie.
Remarque
Les filtres d'entrée paramétrés retardent le signal de commande de l'entrée TOR.
L'état d'une entrée TOR DIm est indiqué par le bit d'information en retour (Page 150) STS_DIm respectif.
Mise à 1 et à 0 de la validation matérielle commandée par niveau avec une entrée TOR La figure suivante montre un exemple de mise à 1 et à 0 commandée par niveau avec une entrée TOR : L'entrée TOR est paramétrée de façon à être active à niveau haut :
Tant que l'entrée TOR est active, la validation matérielle est donnée et les impulsions de comptage sont comptées. Quand l'entrée TOR devient inactive, la validation matérielle est retirée. Les impulsions de comptage sont ignorées et la valeur de comptage reste constante.
Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 21
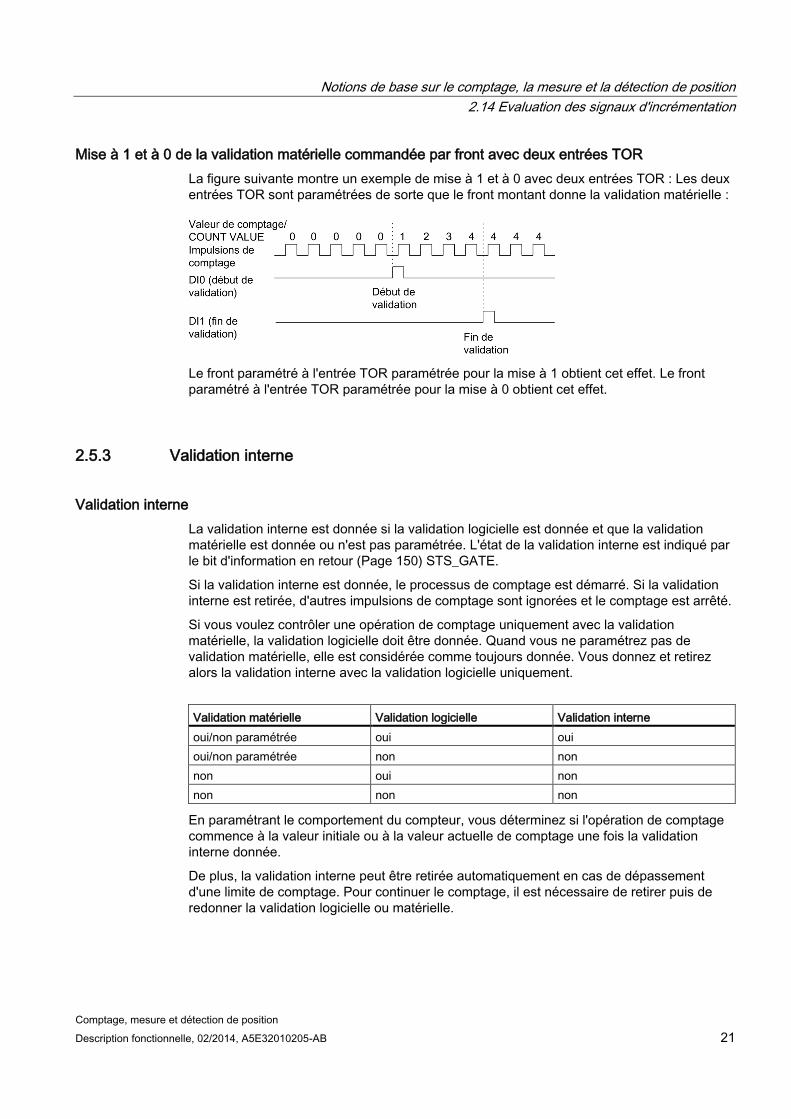
Mise à 1 et à 0 de la validation matérielle commandée par front avec deux entrées TOR La figure suivante montre un exemple de mise à 1 et à 0 avec deux entrées TOR : Les deux entrées TOR sont paramétrées de sorte que le front montant donne la validation matérielle :
Le front paramétré à l'entrée TOR paramétrée pour la mise à 1 obtient cet effet. Le front paramétré à l'entrée TOR paramétrée pour la mise à 0 obtient cet effet.
2.5.3 Validation interne
Validation interne La validation interne est donnée si la validation logicielle est donnée et que la validation matérielle est donnée ou n'est pas paramétrée. L'état de la validation interne est indiqué par le bit d'information en retour (Page 150) STS_GATE.
Si la validation interne est donnée, le processus de comptage est démarré. Si la validation interne est retirée, d'autres impulsions de comptage sont ignorées et le comptage est arrêté.
Si vous voulez contrôler une opération de comptage uniquement avec la validation matérielle, la validation logicielle doit être donnée. Quand vous ne paramétrez pas de validation matérielle, elle est considérée comme toujours donnée. Vous donnez et retirez alors la validation interne avec la validation logicielle uniquement.
Validation matérielle Validation logicielle Validation interne oui/non paramétrée oui oui oui/non paramétrée non non non oui non non non non
En paramétrant le comportement du compteur, vous déterminez si l'opération de comptage commence à la valeur initiale ou à la valeur actuelle de comptage une fois la validation interne donnée.
De plus, la validation interne peut être retirée automatiquement en cas de dépassement d'une limite de comptage. Pour continuer le comptage, il est nécessaire de retirer puis de redonner la validation logicielle ou matérielle.

Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 22 Description fonctionnelle, 02/2014, A5E32010205-AB
2.5.4 Réaction du compteur au début de validation Vous disposez des possibilités de paramétrage suivantes pour le comportement du compteur au début de la validation :
● Mettre le compteur à la valeur initiale
● Continuer à la valeur de comptage actuelle
Mettre le compteur à la valeur initiale Le comportement suivant du compteur s'applique avec ce paramétrage :
Chaque opération de comptage commence à la valeur initiale lors d'une validation interne.
La figure suivante montre un exemple de comptage qui continue après que le compteur a été mis à la valeur initiale :
Continuer à la valeur de comptage actuelle Le comportement suivant du compteur s'applique avec ce paramétrage :
Chaque opération de comptage commence à la valeur actuelle de comptage après la répétition de la validation interne donnée.
La figure suivante montre un exemple de comptage qui continue à la valeur de comptage actuelle :

Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 23
2.6 Capture
2.6.1 Capture avec codeur incrémental ou générateur d'impulsions
Description Enregistrez la valeur actuelle de comptage avec la fonction «Capture" par un signal de référence externe. Vous pouvez paramétrer la fonction de Capture pour les signaux de référence suivants :
● front montant ou descendant d'une entrée TOR
● Front montant et front descendant à une entrée TOR
● Front montant du signal N à l'entrée du codeur
Fonctionnement La valeur de Capture correspond toujours exactement à la valeur de comptage à l'instant du front respectif (retardé du laps de temps paramétré au filtre d'entrée). La fonction de Capture s'applique indépendamment de l'état de la validation interne. Quand la validation est retirée, c'est la valeur de comptage inchangée qui est mémorisée.
La figure suivante donne un exemple pour la fonction de Capture avec le paramétrage suivant :
● Valeur initiale = 0
● Événement de Capture si front montant à l'entrée TOR paramétrée
● Mettre le compteur à la valeur initiale au début de la validation
● Poursuivre les comptages après l'événement de Capture

Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 24 Description fonctionnelle, 02/2014, A5E32010205-AB
La figure suivante donne un autre exemple pour la fonction de Capture avec le paramétrage suivant :
● Valeur initiale = 0
● Événement de Capture si front montant à l'entrée TOR paramétrée
● Mettre le compteur à la valeur initiale au début de la validation
● Mettre la valeur de comptage à la valeur initiale après l'événement de Capture et poursuivre les comptages
Avec le bit de commande (Page 147) EN_CAPTURE, validez la fonction de Capture. Le bit d'information en retour (Page 150) EVENT_CAP indique qu'une valeur de comptage a été mémorisée comme valeur de Capture dans l'interface de compte rendu. Si vous remettez à 0 EN_CAPTURE, EVENT_CAP est remis à 0. L'état d'une entrée TOR est indiqué par le bit d'information en retour (Page 150) STS_DIm respectif.
La figure suivante donne un exemple des bits EN_CAPTURE et EVENT_CAP en cas d'utilisation de la fonction de Capture par le front montant à une entrée TOR :

Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 25
Remarque
Les filtres d'entrée paramétrés retardent le signal de commande de l'entrée TOR correspondante.
La fonction de Capture n'a aucune influence sur le bit d'information en retour STS_CNT ni sur les LED UP et DN.
Alarme de processus Vous pouvez paramétrer une alarme de processus pour la fonction de Capture. Si les alarmes de processus sont déclenchées trop rapidement pour que le système puisse les acquitter, certaines alarmes de processus peuvent être perdues. Vous pouvez faire signaler une alarme de processus perdue par une alarme de diagnostic.
2.6.2 Capture avec codeur absolu SSI
Description La fonction "Capture" vous permet de mémoriser la valeur de position actuelle par un signal de référence externe. Vous pouvez paramétrer la fonction de Capture pour les signaux de référence suivants :
● front montant ou descendant d'une entrée TOR
● Front montant et front descendant à une entrée TOR
Fonctionnement Au moment du front correspondant, la valeur de position du dernier télégramme SSI valide est enregistrée dans la valeur Capture.
La figure suivante montre un exemple d'évènement Capture pour le front montant à l'entrée TOR paramétrée :

Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 26 Description fonctionnelle, 02/2014, A5E32010205-AB
Avec le bit de commande (Page 147) EN_CAPTURE, validez la fonction de Capture. Le bit d'information en retour (Page 150) EVENT_CAP indique qu'une valeur de position a été mémorisée comme valeur de Capture dans l'interface de compte rendu. Si vous remettez à 0 EN_CAPTURE, EVENT_CAP est remis à 0. L'état d'une entrée TOR est indiqué par le bit d'information en retour (Page 150) STS_DIm respectif.
La figure suivante donne un exemple des bits EN_CAPTURE et EVENT_CAP en cas d'utilisation de la fonction de Capture par le front montant à une entrée TOR :
Remarque
Les filtres d'entrée paramétrés retardent le signal de commande de l'entrée TOR correspondante.
Alarme de processus Vous pouvez paramétrer une alarme de processus pour la fonction de Capture. Si les alarmes de processus sont déclenchées trop rapidement pour que le système puisse les acquitter, certaines alarmes de processus peuvent être perdues. Vous pouvez faire signaler une alarme de processus perdue par une alarme de diagnostic.

Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 27
2.7 Synchronisation
Description Avec la fonction "Synchronisation", vous mettez le compteur à la valeur initiale spécifiée au moyen d'un signal de référence externe. Vous pouvez paramétrer la synchronisation pour les signaux de référence suivants :
● Fronts montants ou descendants à une entrée TOR
● Front montant du signal N à l'entrée du codeur
● Front montant du signal N à l'entrée du codeur en fonction du niveau d'une entrée TOR
Fonctionnement La synchronisation a toujours lieu à l'instant exact du signal de référence. La synchronisation s'applique indépendamment de l'état de la validation interne.
Avec le bit de commande (Page 147) EN_SYNC_UP , vous validez la synchronisation pour le sens comptage. Avec le bit de commande (Page 147) EN_SYNC_DN, vous validez la synchronisation pour le sens décomptage. Le bit d'information en retour (Page 150) EVENT_SYNC indique qu'une synchronisation a eu lieu. En remettant à zéro EN_SYNC_UP ou EN_SYNC_DN, EVENT_SYNC est aussi remis à 0.
Remarque
Les filtres d'entrée paramétrés retardent le signal de commande de l'entrée TOR correspondante.
La synchronisation n'a pas d'influence sur le bit d'information en retour (Page 150) STS_CNT ni sur les LED UP et DN.

Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 28 Description fonctionnelle, 02/2014, A5E32010205-AB
Synchronisation unique La figure suivante donne un exemple des bits EN_SYNC_UP, EN_SYNC_DN et EVENT_SYNC avec synchronisation unique par un front à une entrée TOR avec des impulsions dans le sens comptage :
Après validation de la synchronisation pour le sens comptage, le compteur est synchronisé au premier front montant à l'entrée TOR paramétrée. Ce n'est qu'après remise à zéro et nouvelle mise à 1 du bit de commande (Page 147) EN_SYNC_UP que le compteur peut être à nouveau synchronisé.

Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 29
Synchronisation périodique La figure suivante donne un exemple des bits EN_SYNC_UP, EN_SYNC_DN et EVENT_SYNC avec synchronisation périodique par un front à une entrée TOR avec des impulsions dans le sens comptage :
Tant que la synchronisation pour le sens comptage est validée, le compteur est synchronisé à chaque front montant à l'entrée TOR paramétrée.
Alarme de processus Vous pouvez paramétrer une alarme de processus pour la synchronisation. Si les alarmes surviennent trop rapidement pour que le système puisse les acquitter, des alarmes de processus se perdent. Vous pouvez faire signaler une alarme de processus perdue par une alarme de diagnostic.

Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 30 Description fonctionnelle, 02/2014, A5E32010205-AB
2.7.1 Synchronisation par entrée TOR Vous pouvez déclencher la synchronisation par des fronts à une entrée TOR.
Synchronisation unique La figure suivante donne un exemple de synchronisation unique par un front à une entrée TOR :
Après validation de la synchronisation pour le sens comptage, le compteur est synchronisé au premier front montant à l'entrée TOR paramétrée. Jusqu'à la remise à zéro et une nouvelle mise à 1 du bit de commande (Page 147) EN_SYNC_UP , un nouveau front montant est ignoré à l'entrée TOR. Le compteur peut ensuite être à nouveau synchronisé.

Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 31
Synchronisation périodique La figure suivante donne un exemple de synchronisation périodique par un front à une entrée TOR :
Tant que la synchronisation pour le sens comptage est validée, le compteur est synchronisé à chaque front montant à l'entrée TOR paramétrée.

Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 32 Description fonctionnelle, 02/2014, A5E32010205-AB
2.7.2 Synchronisation en cas de signal N Vous pouvez déclencher la synchronisation en cas de signal N à l'entrée du codeur en fonction ou non de l'état d'une entrée TOR.
Synchronisation unique La figure suivante montre un exemple de synchronisation unique en cas de signal N (indépendamment d'une entrée TOR) :
Après validation de la synchronisation pour le sens comptage, le compteur est synchronisé au premier signal N. Après remise à 0, puis nouvelle mise à 1 du bit de commande (Page 147) EN_SYNC_UP , le compteur peut être à nouveau synchronisé.

Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 33
Synchronisation périodique La figure suivante montre un exemple de synchronisation périodique pour signal N :
Tant que la synchronisation pour le sens comptage est validée, le compteur est synchronisé à chaque signal N.

Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 34 Description fonctionnelle, 02/2014, A5E32010205-AB
Validation par une entrée TOR La figure suivante montre un exemple de synchronisation périodique pour signal N en fonction de l'état d'une entrée TOR :
Tant que la synchronisation pour le sens de comptage est validée et que l'entrée TOR correspondante est active, le compteur est synchronisé à chaque signal N. Si l'une des deux conditions n'est pas remplie, le compteur n'est pas synchronisé au signal N.

Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 35
2.8 Valeurs de comparaison
2.8.1 Valeurs de comparaison et sorties
Description Vous pouvez définir deux valeurs de comparaison pouvant commander les deux sorties TOR de la voie indépendamment du programme utilisateur :
● valeur de comparaison 0 pour la sortie TOR DQ0
● valeur de comparaison 1 pour la sortie TOR DQ1
Selon le mode de fonctionnement et le codeur utilisé, vous définissez deux valeurs de position, de comptage ou de mesure comme valeurs de comparaison. La valeur de comparaison 1 doit être supérieure à la valeur de comparaison 0. Les valeurs de comparaison sont paramétrables et peuvent être modifiées via le programme utilisateur au moment de l'exécution.
Commutation des sorties TOR à partir du programme utilisateur Avec les bits de commande (Page 147) TM_CTRL_DQ0 et TM_CTRL_DQ1, commandez l'utilisation des sorties TOR.
Si TM_CTRL_DQm est à 0, vous pouvez commander la sortie TOR respective avec le bit de commande SET_DQm à partir du programme utilisateur, indépendamment de la fonction technologique configurée. Si TM_CTRL_DQm est à 1, la fonction technologique pour la commande de la sortie TOR respective est validée.
L'état d'une sortie TOR est signalé par le bit d'information en retour STS_DQm respectif.
Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 36 Description fonctionnelle, 02/2014, A5E32010205-AB
2.8.2 Commutation liée à des valeurs de comparaison en mode de fonctionnement "Comptage"
Les valeurs de comparaison sont comparées à la valeur de comptage ou de position actuelle. Si la valeur de comptage ou de position remplit la condition de comparaison paramétrée et si la fonction technologique de la sortie TOR correspondante est validée, la sortie TOR est mise à 1. Si vous paramétrez "Entre les valeurs de comparaison 0 et 1" pour la sortie TOR DQ1, les deux valeurs de comparaison ont un effet sur DQ1.
2.8.2.1 Commutation liée à des valeurs de comparaison avec codeur incrémental ou générateur d'impulsions
Vous pouvez faire en sorte que la commutation d'une sortie TOR dépende de l'un des événements de comparaison suivants :
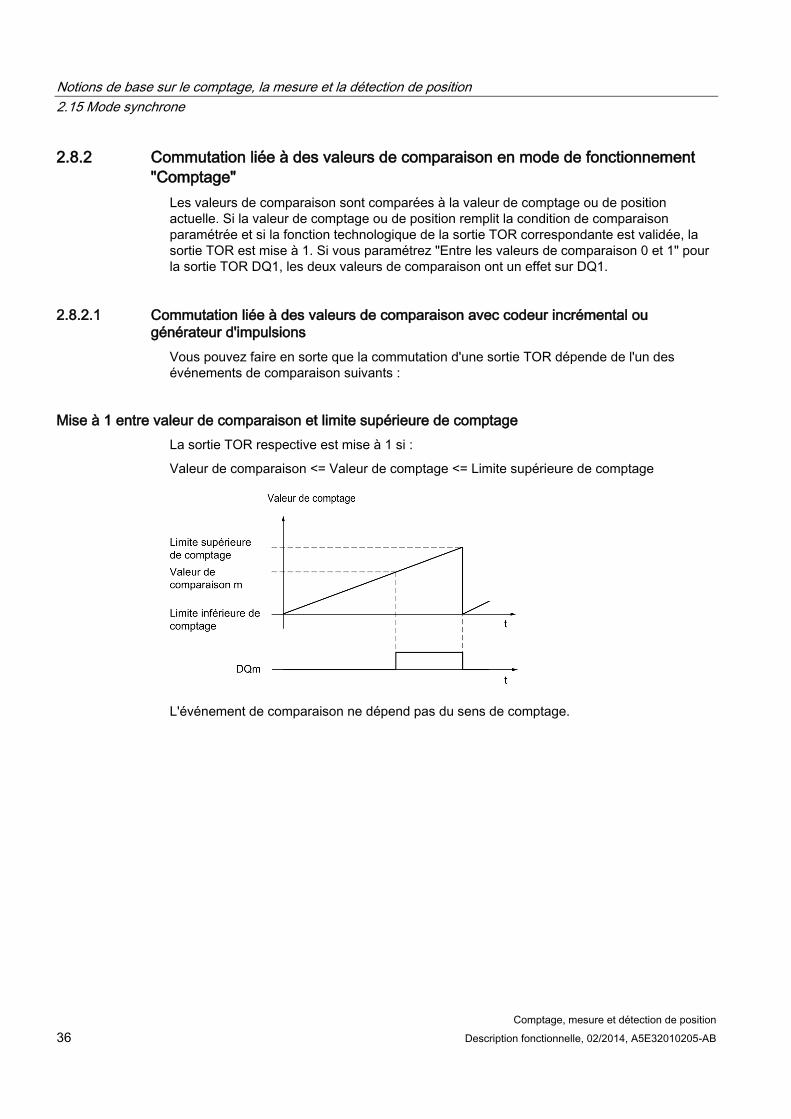
Mise à 1 entre valeur de comparaison et limite supérieure de comptage La sortie TOR respective est mise à 1 si :
Valeur de comparaison <= Valeur de comptage <= Limite supérieure de comptage
L'événement de comparaison ne dépend pas du sens de comptage.

Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 37
Mise à 1 entre valeur de comparaison et limite inférieure de comptage La sortie TOR respective est mise à 1 si :
Limite inférieure de comptage <= Valeur de comptage <= Valeur de comparaison
L'événement de comparaison ne dépend pas du sens de comptage.
Mise à 1 entre valeur de comparaison 0 et valeur de comparaison 1 L'événement de comparaison est paramétrable pour la sortie TOR DQ1 si, pour la sortie TOR DQ0, "Utilisation par le programme utilisateur" est paramétré.
DQ1 est mise à 1 si :
Valeur de comparaison 0 <= Valeur de comptage <= Valeur de comparaison 1
L'événement de comparaison ne dépend pas du sens de comptage.

Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 38 Description fonctionnelle, 02/2014, A5E32010205-AB
Mise à 1 si valeur de comparaison pour une durée d'impulsion La sortie TOR respective est mise à 1 pour un temps déterminé si les conditions suivantes sont remplies :
● Valeur de comptage = Valeur de comparaison
● Sens actuel de comptage = Sens paramétré de comptage pour l'événement de comparaison
La figure suivante donne un exemple d'événement de comparaison dans le sens comptage :
La figure suivante donne un exemple d'événement de comparaison dans le sens décomptage :
Pour répéter l'événement de comparaison, la valeur de comptage doit changer et correspondre à nouveau à la valeur de comparaison respective.

Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 39
Si la durée d'impulsion est à "0" et que la valeur de comptage correspond à la valeur de comparaison, alors la sortie TOR respective est mise à 1 jusqu'à la prochaine impulsion de comptage :
Remarque
Cet événement de comparaison commute la sortie TOR respective si la valeur de comparaison est atteinte par une impulsion de comptage. La sortie TOR ne commute pas avec la mise à 1 de la valeur de comptage, par ex. par synchronisation.
Mise à 1 par le programme utilisateur jusqu'à la valeur de comparaison Vous pouvez mettre à 1 (front) la sortie TOR respective en mettant à 1 le bit de commande (Page 147) SET_DQm. La sortie TOR respective est mise à 0 si l'un des événements suivants se produit :
● Concordance de la valeur de comptage et de la valeur de comparaison dans le sens paramétré de l'événement de comparaison
● Mise à "0" du bit de commande SET_DQm associé.
La figure suivante donne un exemple d'événement de comparaison dans le sens comptage :

Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 40 Description fonctionnelle, 02/2014, A5E32010205-AB
Vous pouvez désactiver la sortie TOR en mettant le bit de commande SET_DQm à 0 avant que la valeur de comptage ne corresponde à la valeur de comparaison.
Remarque
Si la valeur de comparaison est atteinte dans le sens comptage paramétré, le bit d'information en retour EVENT_CMPm est mis à 1 indépendamment de l'état du bit de commande SET_DQm.
L'événement de comparaison commute alors une sortie TOR si la valeur de comparaison respective est atteinte par une impulsion de comptage. La sortie TOR ne commute pas avec la mise à 1 de la valeur de comptage, par ex. par synchronisation.
2.8.2.2 Commutation liée à des valeurs de comparaison avec codeur absolu SSI Vous pouvez faire en sorte que la commutation d'une sortie TOR dépende de l'un des événements de comparaison suivants :
Mise à 1 entre valeur de comparaison et limite supérieure La limite supérieure correspond à la valeur de position maximale.
La sortie TOR respective est mise à 1 si :
Valeur de comparaison <= Valeur de position <= Valeur de position maximale
L'événement de comparaison ne dépend pas du sens de modification de la valeur de position. La valeur de position maximale dépend de la résolution du codeur absolu SSI.
Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 41
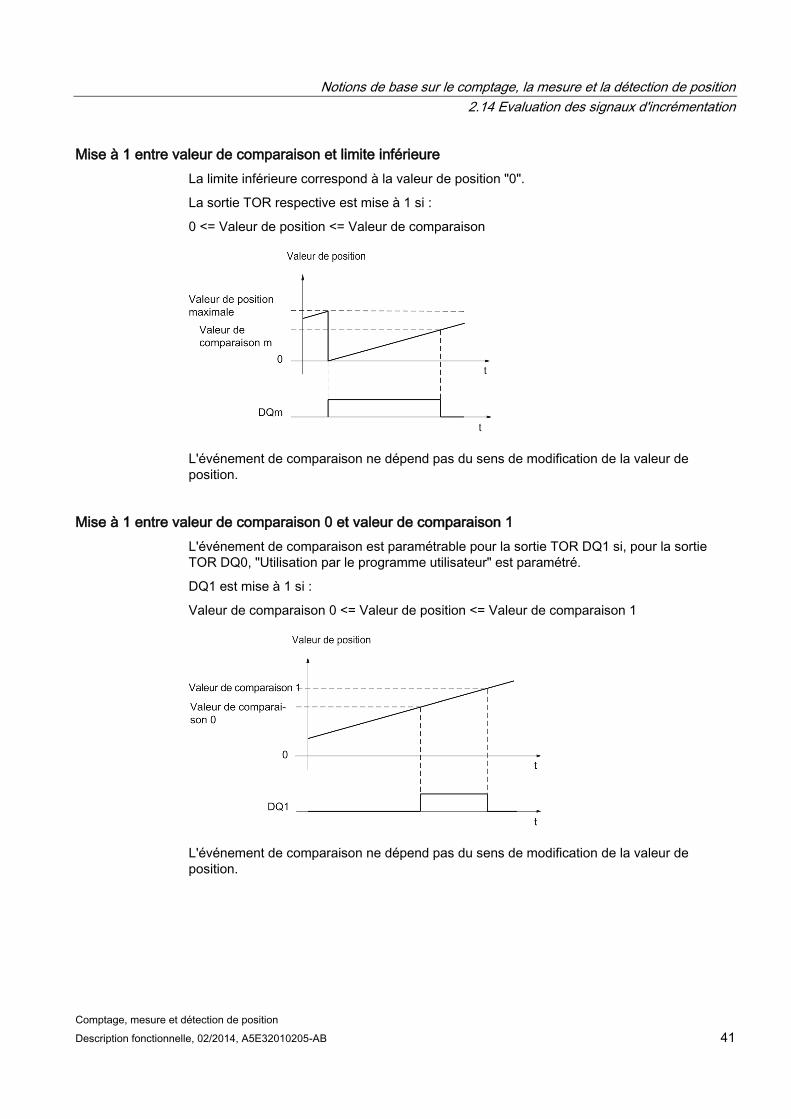
Mise à 1 entre valeur de comparaison et limite inférieure La limite inférieure correspond à la valeur de position "0".
La sortie TOR respective est mise à 1 si :
0 <= Valeur de position <= Valeur de comparaison
L'événement de comparaison ne dépend pas du sens de modification de la valeur de position.
Mise à 1 entre valeur de comparaison 0 et valeur de comparaison 1 L'événement de comparaison est paramétrable pour la sortie TOR DQ1 si, pour la sortie TOR DQ0, "Utilisation par le programme utilisateur" est paramétré.
DQ1 est mise à 1 si :
Valeur de comparaison 0 <= Valeur de position <= Valeur de comparaison 1
L'événement de comparaison ne dépend pas du sens de modification de la valeur de position.

Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 42 Description fonctionnelle, 02/2014, A5E32010205-AB
Mise à 1 si valeur de comparaison pour une durée d'impulsion La sortie TOR respective est mise à 1 pour un temps déterminé si les conditions suivantes sont remplies :
● Concordance de la valeur de position et de la valeur de comparaison ou dépassement de la valeur de comparaison
● Sens actuel de modification de la valeur de position = Sens paramétré pour l'événement de comparaison
La figure suivante donne un exemple d'événement de comparaison dans le sens comptage :
La figure suivante donne un exemple d'événement de comparaison dans le sens décomptage :
Pour répéter l'événement de comparaison, la valeur de position doit changer et correspondre à nouveau à la valeur de comparaison respective ou la dépasser.
Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 43
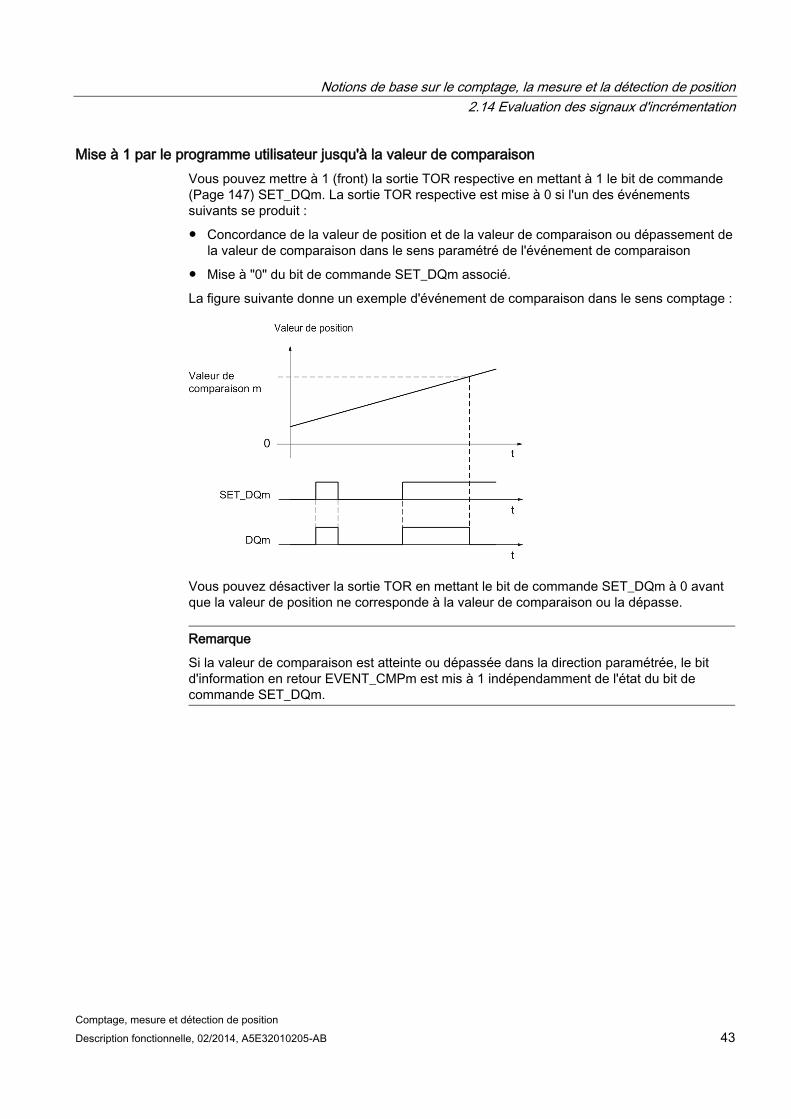
Mise à 1 par le programme utilisateur jusqu'à la valeur de comparaison Vous pouvez mettre à 1 (front) la sortie TOR respective en mettant à 1 le bit de commande (Page 147) SET_DQm. La sortie TOR respective est mise à 0 si l'un des événements suivants se produit :
● Concordance de la valeur de position et de la valeur de comparaison ou dépassement de la valeur de comparaison dans le sens paramétré de l'événement de comparaison
● Mise à "0" du bit de commande SET_DQm associé.
La figure suivante donne un exemple d'événement de comparaison dans le sens comptage :
Vous pouvez désactiver la sortie TOR en mettant le bit de commande SET_DQm à 0 avant que la valeur de position ne corresponde à la valeur de comparaison ou la dépasse.
Remarque
Si la valeur de comparaison est atteinte ou dépassée dans la direction paramétrée, le bit d'information en retour EVENT_CMPm est mis à 1 indépendamment de l'état du bit de commande SET_DQm.

Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 44 Description fonctionnelle, 02/2014, A5E32010205-AB
2.8.3 Commutation liée à des valeurs de comparaison en mode de fonctionnement "Mesure"
Les valeurs de comparaison sont comparées à la valeur actuelle de mesure. Si la valeur de mesure remplit la condition de comparaison paramétrée et si la fonction technologique de la sortie TOR correspondante est validée, la sortie TOR est mise à 1. Si vous paramétrez "Entre les valeurs de comparaison 0 et 1" ou "Pas entre les valeurs de comparaison 0 et 1" pour la sortie TOR DQ1, les deux valeurs de comparaison ont un effet sur DQ1.
Vous pouvez faire en sorte que la commutation d'une sortie TOR dépende de l'un des événements de comparaison suivants :
Mise à 1 au-dessus de la valeur de comparaison La sortie TOR respective est mise à 1 si :
valeur de mesure >= valeur de comparaison
Mise à 1 au-dessous de la valeur de comparaison La sortie TOR respective est mise à 1 si :
valeur de mesure <= valeur de comparaison

Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 45
Mise à 1 entre valeur de comparaison 0 et valeur de comparaison 1 L'événement de comparaison est paramétrable pour la sortie TOR DQ1 si, pour la sortie TOR DQ0, "Utilisation par le programme utilisateur" est paramétré.
DQ1 est mise à 1 si :
Valeur de comparaison 0 <= Valeur de mesure <= Valeur de comparaison 1
Pas de mise à 1 entre les valeurs de comparaison 0 et 1 L'événement de comparaison est paramétrable pour la sortie TOR DQ1 si, pour la sortie TOR DQ0, "Utilisation par le programme utilisateur" est paramétré.
DQ1 est mise à 1 si :
Valeur de comparaison 1 <= Valeur de mesure <= Valeur de comparaison 0

Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 46 Description fonctionnelle, 02/2014, A5E32010205-AB
2.9 Détermination de valeur de mesure
2.9.1 Vue d'ensemble des fonctions de mesure Les fonctions de mesure suivantes sont disponibles :
Type de mesure (Page 49) Description Mesure de fréquence L'évolution dans le temps des impulsions de comptage ou des
modifications des valeurs de position permet de définir la fréquence moyenne dans un intervalle de mesure et de la fournir en retour comme nombre à virgule flottante en hertz.
Mesure de période L'évolution dans le temps des impulsions de comptage ou des modifications des valeurs de position permet de définir la période moyenne dans un intervalle de mesure et de la fournir en retour comme nombre à virgule flottante en secondes.
Mesure de vitesse L'évolution dans le temps des impulsions de comptage ou des modifications des valeurs de position et d'autres paramètres permet de définir la vitesse moyenne dans un intervalle de mesure et de la fournir en retour dans l'unité paramétrée.
Les valeurs de mesure et de comptage sont disponibles en parallèle dans l'interface de compte-rendu.
Période d'actualisation Vous pouvez paramétrer l'intervalle de temps avec lequel le module technologique actualise cycliquement les valeurs de mesure comme période d'actualisation. Des grandeurs de mesure irrégulières peuvent être lissées et la précision de mesure peut être augmentée par des périodes d'actualisation plus grandes.
Commande par validation pour codeur incrémental et générateur d'impulsions La validation interne donnée et retirée définit l'intervalle de temps pendant lequel les impulsions de comptage sont acquises. La période d'actualisation est asynchrone avec la validation donnée, c.-à-d. que la période d'actualisation n'est pas démarrée par la validation donnée. Une fois la validation interne retirée, la dernière valeur de mesure définie continue d'être fournie en retour.

Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 47
2.9.2 Détermination de valeur de mesure avec codeur incrémental ou générateur d'impulsions
2.9.2.1 Plages de mesure
Plages de mesure Les fonctions de mesure présentent les limites de mesure suivantes :
Type de mesure Limite inférieure de plage de
mesure Limite supérieure de plage de mesure
Mesure de fréquence 0,04 Hz 800 kHz* / 4 MHz** Mesure de période 1,25 µs* / 0,25 µs** 25 s Mesure de vitesse Dépend du nombre paramétré d'"Incréments par unité" et de la "Base
de temps pour la mesure de vitesse" * Valable pour codeur incrémental 24 V et évaluation "quadruple" du signal.
** Valable pour codeur incrémental RS422 et évaluation "quadruple" du signal.
Toutes les valeurs de mesure sont retournées sous forme de valeur signée. Le signe indique si la valeur de comptage a augmenté ou diminué dans l'intervalle de temps pertinent.

Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 48 Description fonctionnelle, 02/2014, A5E32010205-AB
2.9.2.2 Intervalle de mesure
Principe de mesure Le module technologique associe une valeur de temps à chaque impulsion de comptage L'intervalle de mesure est défini comme intervalle de temps entre les dernières impulsions de comptage respectives avant et pendant la précédente période d'actualisation. L'intervalle de mesure et le nombre d'impulsions dans cet intervalle sont évalués pour calculer une grandeur de mesure.
Si aucune impulsion de comptage n'apparaît dans une période d'actualisation, une adaptation dynamique de l'intervalle de mesure a lieu. Dans ce cas, une impulsion est admise à la fin de la période d'actualisation et l'intervalle de mesure est calculé entre cette impulsion et la dernière apparue. Le nombre d'impulsions est alors 1.
Le bit d'information en retour STS_M_INTERVAL signale si une impulsion de comptage est apparue dans le précédent intervalle de mesure. Cela permet de différencier une impulsion de comptage acquise d'une impulsion de comptage effective.
Les figures suivantes indiquent le principe de mesure et l'adaptation dynamique de l'intervalle de mesure :

Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 49
2.9.2.3 Types de mesure
Mesure de fréquence La valeur "0" est renvoyée jusqu'à la première valeur de mesure existante.
L'opération de mesure commence avec la première impulsion acquise une fois la validation interne donnée. La première valeur de mesure est calculée au plus tôt après la deuxième impulsion.
Après chaque déroulement de la période d'actualisation, la valeur de mesure est actualisée dans l'interface de compte rendu (Page 150). Si la validation interne est retirée, l'opération de mesure est arrêtée et la valeur de mesure n'est plus actualisée.
La figure suivante donne un exemple de mesure de la fréquence pour une période d'actualisation de 1 s :

Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 50 Description fonctionnelle, 02/2014, A5E32010205-AB
Mesure de période Lors de la mesure de période, l'inverse de la fréquence est fourni comme valeur de mesure.
La valeur "25 s" est renvoyée jusqu'à la première valeur de mesure existante.
Mesure de vitesse Lors de la mesure de vitesse, la fréquence normalisée est fournie comme valeur de mesure. Paramétrez la normalisation via la base de temps et le nombre d'incréments fournis par unité par votre codeur.
Exemple :
Votre codeur fournit 4000 incréments par mètre. La vitesse doit être mesurée en mètres par minute (m/min).
Dans ce cas, vous devez paramétrer 4000 incréments par unité et une base de temps d'une minute.

Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 51
2.9.3 Détermination de valeur de mesure avec codeur absolu SSI
2.9.3.1 Plages de mesure
Plages de mesure pour les codeurs absolus SSI Les fonctions de mesure présentent les limites de mesure suivantes :
Type de mesure Limite inférieure de plage de
mesure Limite supérieure de plage de mesure
Mesure de fréquence 0,04 Hz 4 MHz Mesure de période 0,25 μs 25 s Mesure de vitesse Dépend du nombre paramétré d'"Incréments par unité" et de la "Base
de temps pour la mesure de vitesse"
Toutes les valeurs de mesure sont retournées sous forme de valeur signée. Le signe indique si la valeur de position a augmenté ou diminué dans l'intervalle de temps pertinent.
2.9.3.2 Intervalle de mesure
Principe de mesure Le module technologique associe une valeur de temps à chaque télégramme SSI. L'intervalle de mesure est défini comme intervalle de temps entre le dernier télégramme SSI respectif et la modification de la valeur de position avant et pendant la précédente période d'actualisation. L'intervalle de mesure et la modification de la valeur de position globale dans cet intervalle sont évalués pour calculer une grandeur de mesure. La modification de la valeur de position globale dans un intervalle de mesure correspond au nombre d'incréments du codeur dans le même intervalle de mesure.
Si aucune modification de la valeur de position ne survient dans une période d'actualisation, une adaptation dynamique de l'intervalle de mesure a lieu. Dans ce cas, une modification de la valeur de position est admise à la fin de la période d'actualisationet l'intervalle de mesure est calculé entre cette modification et le dernier télégramme SSI avec une modification de la valeur de position. La modification de la valeur de position est alors 1.
Le bit d'information en retour STS_M_INTERVAL signale si une modification de la valeur de position est survenue dans le précédent intervalle de mesure. Cela permet de différencier une modification de la valeur de position admise d'une modification de la valeur de position effective. Si le module technologique ne peut pas calculer de valeur de mesure en raison d'un dépassement des limites de la plage de mesure, le bit d'information en retour STS_M_INTERVAL n'est pas mis à 1.
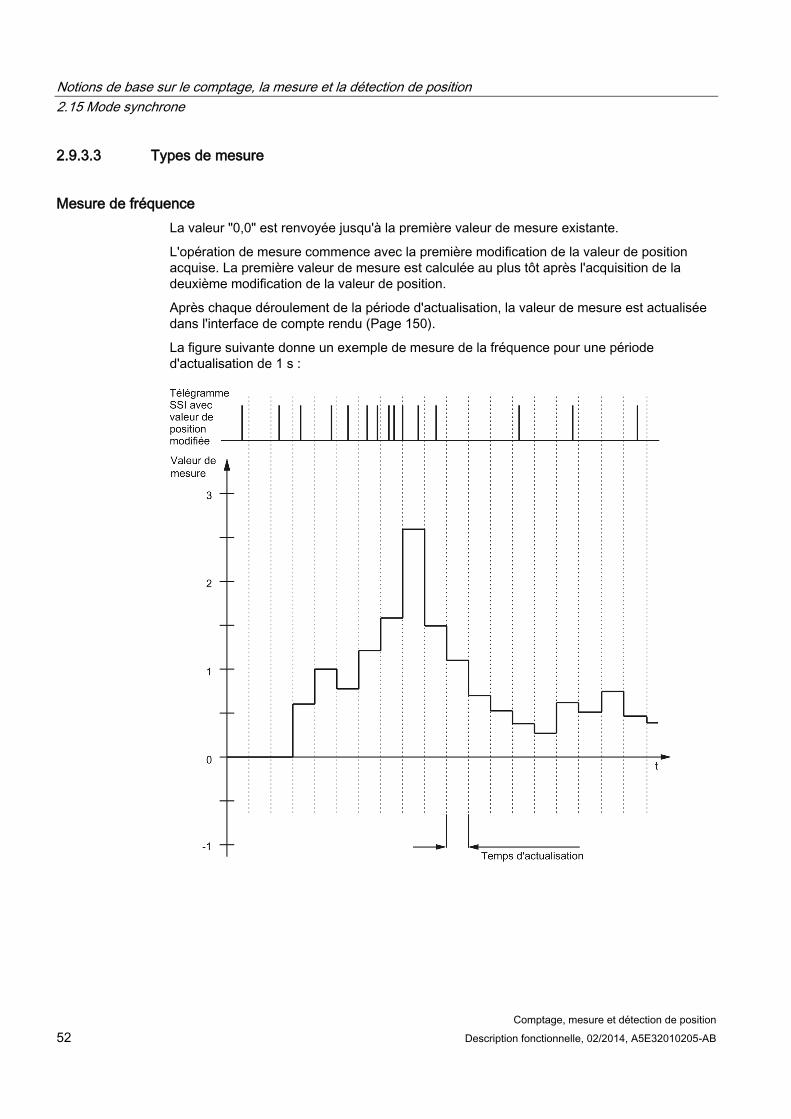
Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 52 Description fonctionnelle, 02/2014, A5E32010205-AB
2.9.3.3 Types de mesure
Mesure de fréquence La valeur "0,0" est renvoyée jusqu'à la première valeur de mesure existante.
L'opération de mesure commence avec la première modification de la valeur de position acquise. La première valeur de mesure est calculée au plus tôt après l'acquisition de la deuxième modification de la valeur de position.
Après chaque déroulement de la période d'actualisation, la valeur de mesure est actualisée dans l'interface de compte rendu (Page 150).
La figure suivante donne un exemple de mesure de la fréquence pour une période d'actualisation de 1 s :

Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 53
Mesure de période Lors de la mesure de période, l'inverse de la fréquence est fourni comme valeur de mesure.
La valeur "25 s" est renvoyée jusqu'à la première valeur de mesure existante.
Mesure de vitesse Lors de la mesure de vitesse, la fréquence normalisée est fournie comme valeur de mesure. Paramétrez la normalisation via la base de temps et le nombre d'incréments fournis par unité par votre codeur.
Exemple :
Votre codeur absolu SSI fonctionne avec une résolution de 12 bits par tour et fournit 4096 incréments par tour. La vitesse doit être mesurée en tours par minute (tr/min).
Dans ce cas, vous devez paramétrer 4096 incréments par unité et une base de temps d'une minute.

Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 54 Description fonctionnelle, 02/2014, A5E32010205-AB
2.10 Hystérésis
2.10.1 Hystérésis avec codeur incrémental ou générateur d'impulsions
Description Vous pouvez définir avec l'hystérésis une plage autour des valeurs de comparaison dans laquelle les sorties TOR ne doivent pas à nouveau commuter avant que la valeur de comptage ait quitté une fois cette plage.
La valeur de comptage peut osciller autour d'une valeur donnée par des mouvements minimes du codeur. Si une valeur de comparaison ou une limite de comptage se situe dans la plage d'oscillation, la sortie TOR concernée est en conséquence très souvent activée et désactivée, en cas de non-utilisation d'une hystérésis. L'hystérésis empêche ces commutations indésirables ainsi que les alarmes de processus paramétrées lorsque survient un événement de comparaison.
L'hystérésis est activée si une impulsion de comptage atteint la valeur de comparaison correspondante. Si la valeur de comptage est mise à la valeur initiale tandis qu'une hystérésis est active, l'hystérésis se désactive.
La zone d'hystérésis se termine, indépendamment de la valeur d'hystérésis, à la limite inférieure ou supérieure de comptage.
Fonctionnement La figure suivante donne un exemple d'hystérésis avec le paramétrage suivant :
● Mise à 1 d'une sortie TOR entre valeur de comparaison et limite supérieure de comptage
● Valeur de comparaison = 5
● Hystérésis = 0 ou 2

Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 55
Lorsque la valeur de comptage 5 est atteinte, l'hystérésis est active. Quand l'hystérésis est active, le résultat de la comparaison ne change pas. Lorsque la valeur de comptage 2 ou 8 est atteinte, l'hystérésis est inactive.
La figure suivante donne un exemple d'hystérésis avec le paramétrage suivant :
● Mise à 1 si valeur de comparaison pour une durée d'impulsion :
● Valeur de comparaison = 5
● Comparaison dans les deux sens de comptage
● Hystérésis = 0 ou 2

Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 56 Description fonctionnelle, 02/2014, A5E32010205-AB
2.10.2 Hystérésis avec codeur absolu SSI
Description Vous pouvez définir avec l'hystérésis une plage autour des valeurs de comparaison dans laquelle les sorties TOR ne doivent pas à nouveau commuter avant que la valeur de position ait quitté une fois cette plage.
La valeur de position peut osciller autour d'une valeur donnée par des mouvements minimes du codeur. Si une valeur de comparaison, "0" ou la valeur de position maximale respective se situe dans la plage d'oscillation, la sortie TOR concernée est par conséquent activée et désactivée fréquemment, en cas de non-utilisation d'une hystérésis. L'hystérésis empêche ces commutations indésirables ainsi que les alarmes de processus paramétrées lorsque survient un événement de comparaison.
La zone d'hystérésis se termine, indépendamment de la valeur d'hystérésis, à "0" et à la valeur de position maximale.
Fonctionnement La figure suivante donne un exemple d'hystérésis avec le paramétrage suivant :
● Mise à 1 d'une sortie TOR entre valeur de comparaison et limite supérieure
● Valeur de comparaison = 10
● Hystérésis = 0 ou 2
Lorsque la valeur de position 10 est atteinte, l'hystérésis est active. Quand l'hystérésis est active, le résultat de la comparaison ne change pas. Lorsque la valeur de position 7 ou 13 est atteinte, l'hystérésis est inactive.

Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 57
La figure suivante donne un exemple d'hystérésis avec le paramétrage suivant :
● Mise à 1 si valeur de comparaison pour une durée d'impulsion :
● Valeur de comparaison = 10
● Comparaison des modifications de valeur de position dans les deux sens
● Hystérésis = 0 ou 2

Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 58 Description fonctionnelle, 02/2014, A5E32010205-AB
2.11 Alarmes
Alarme de processus Le module technologique peut déclencher une alarme de processus dans la CPU, entre autres lorsque survient un événement de comparaison, en cas de dépassement haut ou bas, de passage à zéro du compteur et/ou de changement du sens de comptage. Vous pouvez définir quels événements doivent déclencher une alarme de processus pendant le fonctionnement.
Alarme de diagnostic Le module technologique peut déclencher des alarmes de diagnostic en cas d'erreurs. Vous validez les alarmes de diagnostic pour certaines erreurs dans la configuration de l'appareil. Référez-vous au manuel du module technologique pour savoir quels événements peuvent déclencher une alarme de diagnostic pendant le fonctionnement.
2.12 Détection de position pour Motion Control
Description Vous pouvez utiliser le module technologique pour détecter la position avec S7-1500 Motion Control.
Dans la configuration du module technologique dans STEP 7 (TIA-Portal), sélectionnez à cet effet le mode de fonctionnement "Détection de position pour Motion Control". Les possibilités de paramétrage sont ainsi réduites aux paramètres requis. Le mode de fonctionnement s'applique automatiquement à toutes les voies du module technologique.
Lors de l'utilisation d'un codeur incrémental ou d'un générateur d'impulsions, la détection de position s'appuie sur la fonction de comptage du module technologique. Dans le cas d'un codeur absolu SSI, la valeur absolue est lue via une interface série synchrone, préparée en fonction du paramétrage et mise à disposition pour S7-1500 Motion Control.

Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 59
2.13 Signaux de capteur
2.13.1 Signaux de comptage 24 V et TTL
Signaux de comptage de codeurs incrémentaux 24 V et TTL Le codeur incrémental 24 V fournit les signaux 24 V A, B et N au module technologique. Les signaux A et B sont déphasés respectivement de 90°. Vous pouvez aussi raccorder un codeur incrémental sans signal N.
Avec un codeur incrémental 24 V, les signaux A et B sont utilisés pour le comptage. Le signal N sert, selon le paramétrage, à mettre le compteur à la valeur initiale ou à mémoriser la valeur actuelle de comptage dans la valeur de Capture.
La figure suivante montre un exemple de chronogramme des signaux d'un codeur incrémental 24 V :
Le module technologique détecte le sens de comptage à la suite des fronts aux signaux A et B. Vous pouvez définir une inversion du sens de comptage.

Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 60 Description fonctionnelle, 02/2014, A5E32010205-AB
Signaux de comptage de générateurs d'impulsions 24 V et TTL avec/sans signal de sens Le capteur, un détecteur de proximité ou une barrière photoélectrique par exemple, ne fournit qu'un signal de comptage qui est appliqué à la broche A du compteur.
Vous pouvez appliquer en plus un signal de détection du sens à la broche B du compteur. Si votre capteur ne fournit pas de signal approprié, vous pouvez spécifier le sens de comptage avec le programme utilisateur via l'interface de commande.
La figure suivante montre un exemple de chronogramme des signaux d'un générateur d'impulsions 24 V avec signal de sens et les impulsions de comptage qui en résultent :
Signaux de comptage de générateurs d'impulsions 24 V et TTL avec signal de comptage/décomptage Le signal comptage est raccordé à la borne A. Le signal décomptage est raccordé à la borne B.
La figure suivante montre un exemple de chronogramme des signaux d'un générateur d'impulsions avec signal de comptage/décomptage et les impulsions de comptage qui en résultent :

Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 61
Commutateur P/commutateur M pour signaux de comptage 24 V Vous pouvez raccorder les codeurs ou capteurs suivants aux entrées de comptage :
● Commutateur P : Les entrées A, B et N sont commutées sur 24VDC.
● Commutateur M : Les entrées A, B et N sont commutées sur la masse M.
● Commutation push-pull (commutateurs M et P) : Les entrées A, B et N sont commutées alternativement sur 24VDC et la masse M.
Surveillance des signaux de capteur Les signaux des codeurs 24 V de type push-pull sont surveillés par le module technologique pour détecter une rupture de fil. Les signaux TTL sont surveillés par le module technologique pour détecter une tension de défaut.
Si vous validez l'alarme de diagnostic dans la configuration de l'appareil, le module technologique déclenche une alarme de diagnostic en cas de défaut des signaux de codeur.

Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 62 Description fonctionnelle, 02/2014, A5E32010205-AB
2.13.2 Signaux de comptage RS422
Signaux de comptage de codeurs incrémentaux RS422 Le codeur incrémental RS422 fournit les signaux différentiels suivants au module technologique :
● A et /A
● B et /B
● N et /N
Les informations des signaux RS422 sont codées pour leur tension différentielle entre A et /A, B et /B ou N et /N. Les signaux A et B sont déphasés respectivement de 90°. Vous pouvez aussi raccorder un codeur incrémental sans signal N.
Avec un codeur incrémental RS422, les signaux A et B sont utilisés pour le comptage. Le signal N sert, selon le paramétrage, à mettre le compteur à la valeur initiale ou à mémoriser la valeur actuelle de comptage comme valeur de Capture.
La figure suivante montre un exemple de chronogramme des signaux d'un codeur incrémental RS422 :
Le module technologique détecte le sens de comptage à la suite des fronts aux signaux A et B. Vous pouvez définir une inversion du sens de comptage.

Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 63
Signaux de comptage de générateurs d'impulsions RS422 avec/sans signal de sens Le codeur, une barrière photoélectrique par exemple, fournit uniquement un signal de comptage raccordé à la borne A.
Vous pouvez raccorder en plus un signal de détection du sens à la borne B. Si votre capteur ne fournit pas de signal approprié, vous pouvez spécifier le sens de comptage avec le programme utilisateur via l'interface de commande.
La figure suivante montre un exemple de chronogramme des signaux d'un générateur d'impulsions RS422 avec signal de sens et les impulsions de comptage qui en résultent :
Signaux de comptage de générateurs d'impulsions RS422 avec signal comptage/décomptage Le signal de comptage est raccordé aux bornes A. Le signal de décomptage est raccordé aux bornes B.
La figure suivante montre un exemple de chronogramme des signaux d'un générateur d'impulsions RS422 avec signal de comptage/décomptage et les impulsions de comptage qui en résultent :
Surveillance des signaux de capteur Les signaux du RS422 sont surveillés par le module technologique pour détecter une rupture de fil, un court-circuit et une tension manquante.
Si vous validez l'alarme de diagnostic dans la configuration de l'appareil, le module technologique déclenche une alarme de diagnostic en cas de défaut des signaux de codeur.

Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 64 Description fonctionnelle, 02/2014, A5E32010205-AB
2.13.3 Signaux SSI
Signaux des codeurs absolus SSI Le codeur absolu SSI et le module technologique communiquent via les signaux de données SSI DAT et /DAT (D) et les signaux d'horloge SSI CLK et /CLK (C). SSI utilise la norme relative aux signaux RS422. L'information de signal est codée dans la tension différentielle respective entre C et /C ainsi que D et /D.
Surveillance des signaux de capteur et des télégrammes SSI Les signaux d'un codeur absolu SSI sont surveillés par le module technologique pour détecter une rupture de fil, un court-circuit et une tension manquante. En outre, le module technologique surveille les télégrammes SSI pour détecter des erreurs.
Si vous validez les alarmes de diagnostic dans la configuration de l'appareil, le module technologique déclenche une alarme de diagnostic en cas de défaut des signaux de capteur ou en cas de télégramme SSI.
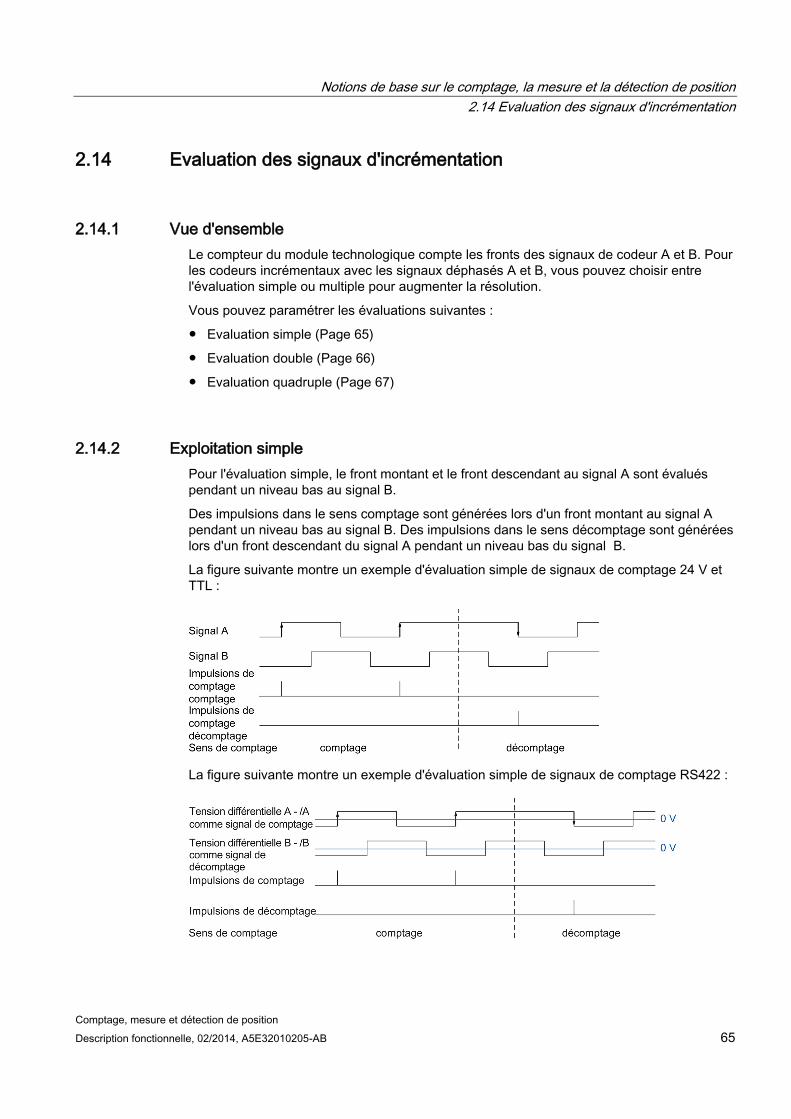
Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 65
2.14 Evaluation des signaux d'incrémentation
2.14.1 Vue d'ensemble Le compteur du module technologique compte les fronts des signaux de codeur A et B. Pour les codeurs incrémentaux avec les signaux déphasés A et B, vous pouvez choisir entre l'évaluation simple ou multiple pour augmenter la résolution.
Vous pouvez paramétrer les évaluations suivantes :
● Evaluation simple (Page 65)
● Evaluation double (Page 66)
● Evaluation quadruple (Page 67)
2.14.2 Exploitation simple Pour l'évaluation simple, le front montant et le front descendant au signal A sont évalués pendant un niveau bas au signal B.
Des impulsions dans le sens comptage sont générées lors d'un front montant au signal A pendant un niveau bas au signal B. Des impulsions dans le sens décomptage sont générées lors d'un front descendant du signal A pendant un niveau bas du signal B.
La figure suivante montre un exemple d'évaluation simple de signaux de comptage 24 V et TTL :
La figure suivante montre un exemple d'évaluation simple de signaux de comptage RS422 :

Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 66 Description fonctionnelle, 02/2014, A5E32010205-AB
2.14.3 Exploitation double Pour l'évaluation double, le front montant et le front descendant du signal A sont évalués.
La génération d'impulsions dans le sens comptage ou décomptage dépend du sens des fronts du signal A et du niveau au signal B pendant ce temps.
La figure suivante montre un exemple d'évaluation double de signaux de comptage 24 V et TTL :
La figure suivante montre un exemple d'évaluation double de signaux de comptage RS422 :
Figure 2-1 Double

Notions de base sur le comptage, la mesure et la détection de position 2.14 Evaluation des signaux d'incrémentation
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 67
2.14.4 Exploitation quadruple Pour l'évaluation quadruple, les fronts montants et descendants des signaux A et B sont évalués.
La génération d'impulsions dans le sens comptage ou décomptage dépend du sens des fronts de l'un des signaux et du niveau de l'autre, respectivement, pendant ce temps.
La figure suivante montre un exemple d'évaluation quadruple de signaux de comptage 24 V et TTL :
La figure suivante montre un exemple d'évaluation quadruple de signaux de comptage RS422 :
Notions de base sur le comptage, la mesure et la détection de position 2.15 Mode synchrone
Comptage, mesure et détection de position 68 Description fonctionnelle, 02/2014, A5E32010205-AB
2.15 Mode synchrone Le module technologique prend en charge la fonction système "Mode synchrone" en fonctionnement décentralisé. Cette fonction permet de détecter les valeurs de position, de comptage et de mesure dans une cadence système fixe.
En mode synchrone, l'horloge du programme utilisateur, le transfert des signaux d'entrée et le traitement dans le module technologique sont synchronisés entre eux. Les signaux de sortie commutent dès que la condition de comparaison respective est remplie. Le changement d'état d'une entrée TOR entraîne immédiatement la réaction prévue du module technologique et la modification du bit d'état de l'entrée TOR dans l'interface de compte rendu.
Traitement des données Les données qui ont été transférées dans le cycle de bus actuel via l'interface de commande au module technologique sont opérantes si elles sont traitées dans le cycle interne du module technologique. À l'instant Ti, la valeur de position, de comptage ou de mesure, ainsi que les bits d'état, sont acquis et mis à disposition dans l'interface de compte rendu pour en être extraits dans le cycle de bus actuel.
En mode synchrone, les données dans l'interface de compte rendu sont toujours cohérentes dans tous les octets.
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 69
Utiliser High_Speed_Counter 3 3.1 Objet technologique High_Speed_Counter
STEP 7 (TIA-Portal) vous aide à configurer les fonctions de comptage et de mesure des modules technologiques grâce à la fonction "Objets technologiques" dans le navigateur de projet ("Projet > S7-1500 PLC > Objets technologiques") :
● Dans STEP 7 (TIA-Portal), configurez l'objet technologique High_Speed_Counter avec les paramètres des fonctions de comptage et de mesure.
● Dans le programme utilisateur, programmez l'instruction High_Speed_Counter correspondante. Cette instruction intègre l'alimentation de l'interface de commande et de compte rendu du module technologique
L'objet technologique High_Speed_Counter correspond au DB d'instance de l'instruction High_Speed_Counter. La configuration des fonctions de comptage et de mesure est enregistrée dans l'objet technologique. L'objet technologique se trouve dans le dossier "PLC > Objets technologiques". La réalisation se fait par un DB d'instance de l'instruction.
L'objet technologique High_Speed_Counter peut être utilisé de la même façon pour les modules technologiques des systèmes S7-1500 et ET 200SP.
Mode de fonctionnement Comptage En cas d'utilisation de l'objet technologique High_Speed_Counter, le mode de fonctionnement Comptage est automatiquement défini. La valeur de mesure est disponible en parallèle.
Mode de fonctionnement Mesure Pour le mode de fonctionnement Mesure, aucun objet technologique n'est disponible. Le paramétrage du mode de fonctionnement Mesure s'effectue via le paramétrage (HW Config) (Page 119) du module technologique. La commande du module technologique se fait par l'accès direct à l'interface de commande et de compte-rendu.
Détection de position ● Le paramétrage du codeur absolu SSI (Page 129) s'effectue via le paramétrage (HW
Config) (Page 119) du module technologique. Aucun objet technologique n'est disponible pour la détection de position avec un codeur absolu SSI.
● Le paramétrage des signaux de codeur pour la détection de position pour Motion Control (Page 112) s'effectue via la configuration du module technologique. Vous effectuez l'autre configuration de cette application via l'objet technologique "TO_ExternalEncoder" de S7-1500 Motion Control.

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position 70 Description fonctionnelle, 02/2014, A5E32010205-AB
3.2 Vue d'ensemble des étapes de configuration
Introduction Le tableau ci-après montre la marche à suivre de principe pour configurer les fonctions de comptage et de mesure du module technologique via l'objet technologique High_Speed_Counter.
Condition Pour mettre en œuvre l'objet technologique High_Speed_Counter, il faut créer un projet dans STEP 7 (TIA-Portal) avec une CPU S7-1500.
Marche à suivre Procédez dans l'ordre recommandé ci-après :
Etape Description 1 Configuration du module technologique et définition de l'utilisation de l'objet technologique
(Page 107) 2 Ajouter l'objet technologique (Page 71) 3 Travailler avec la boîte de dialogue de configuration (Page 73) 4 Appeler l'instruction dans le programme utilisateur (Page 92) 5 Chargement dans la CPU 6 Mettre l'objet technologique en service (Page 103) 7 Diagnostic de l'objet technologique (Page 105)

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 71
3.3 Ajouter l'objet technologique
Ajouter l'objet technologique dans le navigateur de projet Lorsque vous ajoutez un objet technologique, un DB d'instance est généré pour l'instruction de cet objet technologique. La configuration de l'objet technologique est stockée dans ce DB d'instance.
Condition Un projet est créé avec une CPU S7-1500.
Marche à suivre Pour ajouter un objet technologique, procédez de la manière suivante :
1. Dans le navigateur du projet, ouvrez le dossier de la CPU.
2. Ouvrez le dossier "Objets technologiques".
3. Double-cliquez sur "Ajouter un nouvel objet". La boîte de dialogue "Ajouter un nouvel objet" s'ouvre.
4. Choisissez la technologie "Comptage et mesure".
5. Choisissez l'objet "High_Speed_Counter".
6. Entrez un nom spécifique pour l'objet technologique dans le champ de saisie "Nom".
7. Si vous souhaitez modifier le numéro proposé du DB d'instance, sélectionnez l'option "Manuel".
8. Si vous souhaitez fournir vos propres informations sur l'objet technologique, cliquez sur "Informations complémentaires".
9. Confirmez en cliquant sur "OK".

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position 72 Description fonctionnelle, 02/2014, A5E32010205-AB
Résultat Le nouvel objet technologique est généré et rangé dans le dossier "Objets technologiques" dans la navigation de projet.
Objet Description
① Configuration (Page 73) Dans la boîte de dialogue de configuration : • Association du module technologique et de la voie • Réglage des paramètres de l'objet technologique pour
les fonctions de comptage et de mesure Si vous modifiez la configuration de l'objet technologique, vous devez ensuite charger l'objet technologique et la configuration matérielle dans la CPU.
② Mise en service (Page 103) Mise en service de l'objet technologique et test de ses fonctions : Simulation des paramètres de l'instruction High_Speed_Counter et observation des effets
③ Diagnostic (Page 105) Surveillance des fonctions de comptage et de mesure

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 73
3.4 Configurer High_Speed_Counter
3.4.1 Travailler avec la boîte de dialogue de configuration Vous configurez les propriétés de l'objet technologique dans la fenêtre de configuration. Pour ouvrir cette fenêtre, procédez comme suit :
1. Dans la navigation de projet, ouvrez le dossier "Objets technologiques".
2. Dans la navigation de projet, ouvrez l'objet technologique.
3. Double-cliquez sur l'objet "Configuration".
La configuration comporte les catégories suivantes :
● Paramètres de base
Les paramètres de base contiennent le choix du module technologique et le numéro de la voie de comptage pour laquelle l'objet technologique est configuré.
● Paramètres avancés
Les paramètres avancés contiennent les paramètres pour adapter les fonctions de comptage et de mesure et pour régler le comportement des entrées et des sorties TOR.

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position 74 Description fonctionnelle, 02/2014, A5E32010205-AB
Symboles de la fenêtre de configuration Dans la navigation de la configuration, des symboles donnent des détails supplémentaires sur l'état de la configuration :
La configuration contient des valeurs par défaut et elle est complète.
La configuration contient uniquement des valeurs par défaut. Celles-ci permettent la mise en œuvre de l'objet technologique sans aucune modification.
La configuration contient des valeurs définies par l'utilisateur et elle est complète Tous les champs de saisie de la configuration contiennent des valeurs valides et au moins une valeur par défaut a été modifiée.
La configuration est incomplète ou erronée Un champ de saisie ou une liste déroulante au moins contient une valeur invalide. Le champ ou la liste en question sont marqués en rouge. Un clic affiche la cause de l'erreur dans la liste déroulante des messages d'erreur.
Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 75
3.4.2 Paramètres de base Sous "Paramètres de base", établissez la liaison entre l'objet technologique High_Speed_Counter et le module technologique.
Module Vous sélectionnez le module technologique dans une boîte de dialogue suivante. Vous avez le choix entre tous les modules technologiques (centralisés ou décentralisés) configurés sous la CPU S7-1500 pour une utilisation avec un objet technologique de "Comptage et mesure".
Après avoir sélectionné le module technologique, vous pouvez ouvrir la configuration de l'appareil du module technologique en cliquant sur le bouton "Configuration de l'appareil"
Le paramétrage requis du module technologique pour utiliser l'objet technologique s'effectue via "Paramètres avancés" de l'objet technologique.
Voie Pour un module technologique à plusieurs voies de comptage, sélectionnez en plus le numéro de la voie à laquelle s'applique l'objet technologique High_Speed_Counter.
Harmonisation des valeurs de paramètre Si, après association de la voie de comptage à l'objet technologique, il y a une incohérence entre les valeurs de paramètres sous "Paramètres" (HWCN) et dans l'objet technologique, un bouton "Ecraser les paramètres du module technologique" apparaît. En cliquant sur le bouton, les valeurs de paramètres sous Paramètres" (HWCN) sont écrasées (après demande) par celles de l'objet technologique dans STEP 7 (TIA Portal). Les valeurs actuelles de paramètres de l'objet technologique sont affichées sous "Paramètres" (HWCN) (uniquement pour lecture).

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position 76 Description fonctionnelle, 02/2014, A5E32010205-AB
3.4.3 Entrées de comptage
3.4.3.1 Spécifier les signaux d'entrée/le type de codeur
Type de signal Vous avez le choix entre les types de signal (Page 59) suivants :
Symbole Type de signal Signification
Codeur incrémental (A, B décalage de phase)
Un codeur incrémental avec les signaux déphasés A et B est raccordé.
Codeur incrémental (A, B, N)
Un codeur incrémental avec les signaux déphasés A et B et un signal de zéro N est raccordé.
Impulsion (A) et sens (B) Un générateur d'impulsions (signal A) avec signal de sens (signal B) est raccordé.
Impulsion (A) Un générateur d'impulsions (signal A) sans signal de sens est raccordé. Vous pouvez spécifier le sens de comptage via l'interface de commande (Page 147).
Comptage (A), décomptage (B)
Des signaux pour le comptage (signal A) et pour le décomptage (signal B) sont raccordés.
Inverser le sens Vous pouvez inverser le sens de comptage pour l'adapter au processus.
L'inversion du sens n'est paramétrable et opérante que si vous avez sélectionné le type de signal "Codeur incrémental (A, B décalage de phase)" ou "Codeur incrémental (A, B, N)".

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 77
3.4.3.2 Autres paramètres
Evaluation du signal En paramétrant l'évaluation du signal (Page 65), vous déterminez quels fronts des signaux sont comptés.
Vous avez le choix entre les options suivantes :
Symbole Evaluation du
signal Signification
Simple (Page 65) (option par défaut)
Les fronts du signal A sont évalués pendant un niveau bas du signal B.
Double (Page 66) Chaque front du signal A est évalué.
Quadruple (Page 67)
Chaque front des signaux A et B est évalué.
Le paramètre est paramétrable pour les types de signaux suivants :
● Codeur incrémental (A, B décalage de phase)
● Codeur incrémental (A, B, N)

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position 78 Description fonctionnelle, 02/2014, A5E32010205-AB
Fréquence de filtre En paramétrant la fréquence de filtre, vous supprimez les perturbations aux entrées de comptage A, B et N.
La fréquence de filtre sélectionnée se réfère à un rapport impulsion/pause compris entre 40:60 et 60:40. Il en résulte ainsi une certaine durée minimale d'impulsion/de pause. Les transitions dont la durée est inférieure à la durée minimale d'impulsion/de pause sont inhibées.
Vous avez le choix entre les fréquences de filtre suivantes :
Tableau 3- 1 Fréquence de filtre et durée minimale d'impulsion/de pause respective
Fréquence de filtre Durée minimale d'impulsion/de pause 100 Hz 4,0 ms 200 Hz 2,0 ms 500 Hz 800 µs 1 kHz 400 µs 2 kHz 200 µs 5 kHz 80 µs 10 kHz 40 µs 20 kHz 20 µs 50 kHz 8,0 µs 100 kHz 4,0 µs 200 kHz (option par défaut de TM Count) 2,0 µs 500 kHz* 0,8 µs 1 MHz* (option par défaut pour TM PosInput) 0,4 µs * Uniquement pour TM PosInput

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 79
Type de capteur En paramétrant le type de capteur, vous déterminez comment les entrées de comptage sont commutées pour le TM Count.
Vous avez le choix entre les options suivantes :
Type de capteur Signification Commutateur P (option par défaut)
Le codeur ou le capteur commute les entrées A, B et N sur 24VDC.
Commutateur M Le codeur ou le capteur commute les entrées A, B et N sur M. Push-pull (commutateurs M et P) Le codeur ou le capteur commute les entrées A, B et N
alternativement sur M et 24VDC.
Pour les codeurs incrémentaux, on sélectionne habituellement "Push-pull". Dans le cas d'une utilisation de capteurs à 2 fils, par ex. des barrières photoélectriques ou des détecteurs de proximité, le câblage "Commutateur P" ou "Commutateur M" doit être choisi en conséquence.
Vous pouvez savoir si votre codeur incrémental est de type push-pull en consultant la fiche technique du codeur.
Remarque
Si vous utilisez un codeur de type push-pull, vous pouvez surveiller les signaux de codeur pour détecter une rupture de fil.
Norme d'interface Ce paramètre vous permet de définir pour TM PosInput si le codeur fournit des signaux symétriques (RS422) ou asymétriques (TTL).
Vous avez le choix entre les options suivantes :
Norme d'interface Signification RS422, symétrique Le codeur fournit des signaux symétriques conformément à la
norme RS422 (Page 62). TTL (5 V), asymétrique Le codeur fournit des signaux 5 V asymétriques conformément
à la norme TTL (Page 59).
Remarque
La norme RS422 offre une meilleure résistance aux perturbations que la norme TTL. Si votre codeur incrémental ou générateur d'impulsions remplit les exigences des normes RS422 et TTL, la norme RS422 est pour cette raison recommandée.

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position 80 Description fonctionnelle, 02/2014, A5E32010205-AB
Réaction en cas de signal N Avec ce paramètre, vous déterminez la réaction qui sera déclenchée par le signal N.
Vous avez le choix entre les options suivantes :
Option Signification Pas de réaction en cas de signal N (option par défaut)
Le compteur n'est pas influencé par le signal N.
Synchronisation en cas de signal N (Page 32) Le compteur est mis à la valeur initiale en cas de signal N. Si vous sélectionnez la fonction "Validation de synchronisation en cas de signal N" pour une entrée TOR, la synchronisation dépendra du niveau à l'entrée TOR.
Capture si signal N (Page 23) La valeur de comptage est enregistrée dans la valeur Capture pour le signal N.
Remarque
Vous ne pouvez choisir la réaction en cas de signal N que si vous avez sélectionné le type de signal (Page 76) "Codeur incrémental (A, B, N)".
Remarque
Si vous sélectionnez " Synchronisation en cas de signal N", vous pourrez sélectionner, pour une entrée TOR (Page 83), la fonction "Validation de synchronisation en cas de signal N".
Fréquence Avec ce paramètre, déterminez la fréquence des événements suivants :
● Synchronisation en cas de signal N
● Synchronisation comme fonction d'une entrée TOR
Vous avez le choix entre les options suivantes :
Option Signification Monocoup (option par défaut)
Le compteur n'est positionné qu'au premier signal N ou qu'au premier front paramétré de l'entrée TOR.
Périodique Le compteur est positionné à chaque signal N ou à chaque front paramétré de l'entrée TOR.

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 81
3.4.4 Réaction du compteur
3.4.4.1 Limites de comptage et valeur initiale
Limite supérieure de comptage En paramétrant la limite supérieure, vous limitez la plage de comptage. Vous pouvez saisir une valeur jusqu'à 2147483647 (231-1). Vous devez saisir une valeur supérieure à la limite de comptage inférieure.
La valeur par défaut est "2147483647".
Limite inférieure de comptage En paramétrant la limite inférieure, vous limitez la plage de comptage. Vous pouvez saisir une valeur jusqu'à -2147483648 (-231). Vous devez saisir une valeur inférieure à la limite supérieure de comptage.
La valeur par défaut est "-2147483648".
Valeur initiale Avec la valeur initiale, vous paramétrez à quelle valeur le comptage débutera et se poursuivra pour certains événements définis. Vous devez saisir une valeur comprise entre les limites de comptage ou égale à ces limites.
La valeur par défaut est "0".
Informations complémentaires Pour plus d'informations, référez-vous à Réaction du compteur au début de validation (Page 22).
3.4.4.2 Réaction du compteur aux limites et au début de la validation
Réaction en cas de dépassement d'une limite Vous pouvez paramétrer la réaction suivante au dépassement d'une limite de comptage :
Réaction Signification Arrêter le comptage L'opération de comptage est interrompue et la validation interne est
retirée après le dépassement d'une limite de comptage. Au redémarrage de l'opération de comptage, vous devez retirer puis redonner la validation logicielle ou matérielle, le cas échéant.
Poursuivre le comptage (option par défaut)
Le comptage continue soit à la valeur initiale, soit à l'autre limite de comptage, selon ce qui a été paramétré par ailleurs.

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position 82 Description fonctionnelle, 02/2014, A5E32010205-AB
Remise à 0 en cas de dépassement d'une limite de comptage Vous pouvez remettre le compteur à l'une des valeurs suivantes quand une limite de comptage se trouve dépassée :
Réinitialisation de la valeur Signification A la valeur initiale La valeur de comptage est mise à la valeur initiale. À l'autre limite de comptage (option par défaut)
La valeur de comptage est mise à l'autre limite de comptage.
Réaction en cas de début de validation Vous pouvez paramétrer la réaction au début de validation (Page 22) suivante :
Réaction Signification Régler à la valeur initiale Lorsque la validation est donnée, la valeur de comptage est
mise à la valeur initiale. Poursuivre avec la valeur actuelle (option par défaut)
Lorsque la validation est donnée, le comptage se poursuit à la dernière valeur de comptage.

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 83
3.4.5 Réaction d'une entrée TOR
3.4.5.1 Fonction d'une entrée TOR
Régler la fonction de l'entrée TOR (DI) En paramétrant une entrée TOR, vous déterminez quelle fonction son changement d'état logique va déclencher.
Vous avez le choix entre les options suivantes :
Fonction d'une entrée TOR Signification Début/fin de validation (commandé par niveau) Le niveau de l'entrée TOR respective met à 1 et
à 0 la validation matérielle (Page 20). Début de validation (commandé par front) Le front paramétré à l'entrée TOR respective met
à 1 la validation matérielle (Page 20). Fin de validation (commandée par front) Le front paramétré à l'entrée TOR respective met
à 0 la validation matérielle (Page 20). Synchronisation (Page 27) Le front paramétré à l'entrée TOR respective met
le compteur à la valeur initiale. Validation de synchronisation en cas de signal N Le niveau actif à l'entrée TOR respective active la
synchronisation du compteur en cas de signal N (Page 32).
Capture (Page 23) Le front paramétré à l'entrée TOR respective mémorise la valeur actuelle de comptage comme valeur de Capture.
Entrée TOR sans fonction Aucune fonction n'est associée à l'entrée TOR respective. La CPU peut lire l'état logique de l'entrée TOR via l'interface de compte rendu (Page 150).
Remarque
Chaque fonction, sauf "Entrée TOR sans fonction", peut être utilisée uniquement une fois et ne peut plus être sélectionnée par les autres entrées TOR.
Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position 84 Description fonctionnelle, 02/2014, A5E32010205-AB
Temps de filtre En paramétrant le temps de filtre, vous supprimez les perturbations aux entrées TOR. Les signaux dont la durée d'impulsion est inférieure au temps de filtre paramétré ne sont pas pris en compte.
Vous avez le choix entre les temps de filtre suivants :
● Aucun
● 0,05 ms
● 0,1 ms (option par défaut)
● 0,4 ms
● 0,8 ms
● 1,6 ms
● 3,2 ms
● 12,8 ms
● 20 ms
Remarque
Si vous choisissez l'option "Aucun" ou "0,05 ms", vous devez utiliser des câbles blindés pour le raccordement des entrées TOR.
Remarque
Vous pouvez paramétrer simultanément le temps de filtre uniquement sous "Comportement DI0" pour toutes les entrées TOR.

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 85
3.4.5.2 Options des fonctions Certaines fonctions nécessitent d'autres paramètres avec lesquels vous pouvez spécifier plus précisément le comportement. Ils sont paramétrables pour la fonction respective.
Sélection du niveau Avec ce paramètre, vous déterminez pour quel niveau l'entrée TOR sera active.
Vous avez le choix entre les options suivantes :
Niveau Signification Actif si niveau High (option par défaut)
L'entrée TOR en question est active quand elle a la valeur 1.
Activé si niveau Low L'entrée TOR en question est active quand elle a la valeur 0.
Le paramètre est paramétrable pour les fonctions suivantes d'une entrée TOR :
● Début/fin de validation (commandé par niveau)
● Validation de synchronisation en cas de signal N
Sélection du front Avec ce paramètre, vous déterminez sur quel front d'une entrée TOR la fonction paramétrée est déclenchée.
Selon la fonction sélectionnée, vous avez le choix entre les options suivantes :
● Si front montant (option par défaut)
● Si front descendant
● Si front montant et descendant
Le paramètre est paramétrable pour les fonctions suivantes d'une entrée TOR :
● Début de validation (commandé par front)
● Fin de validation (commandée par front)
● Synchronisation
● Capture
"Si front montant et descendant" est paramétrable uniquement pour la fonction "Capture".

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position 86 Description fonctionnelle, 02/2014, A5E32010205-AB
Réaction de la valeur de comptage après Capture Vous pouvez paramétrer le comportement suivant du compteur après un événement de Capture (Page 23) :
Signification Poursuivre le comptage (option par défaut)
L'opération de comptage reprend sans changement après enregistrement de la valeur actuelle de comptage comme valeur de Capture.
Réglage à la valeur initiale et poursuivre le comptage
L'opération de comptage reprend avec la valeur initiale après enregistrement de la valeur actuelle de comptage comme valeur de Capture.
Voir aussi Fonction d'une entrée TOR (Page 83)

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 87
3.4.6 Fonction d'une sortie TOR (DQ)
Définir sortie En paramétrant une sortie TOR, vous déterminez la condition (Page 36) pour laquelle elle commute.
Vous avez le choix entre les options suivantes :
Fonction d'une sortie TOR Signification Entre la valeur de comparaison et la limite supérieure de comptage (option par défaut)
La sortie TOR respective est active si la valeur de comptage se trouve entre la valeur de comparaison et la limite supérieure de comptage.
Entre valeur de comparaison et limite inférieure de comptage
La sortie TOR respective est active si la valeur de comptage se trouve entre la valeur de comparaison et la limite inférieure de comptage.
Entre les valeurs de comparaison 0 et 1 La sortie TOR DQ1 est active si la valeur de comptage se trouve entre la valeur de comparaison 0 et la valeur de comparaison 1.
Si valeur de comparaison pour une durée d'impulsion
La sortie TOR respective est active une fois pour la durée et le sens de comptage paramétrés si la valeur de comptage correspond à la valeur de comparaison.
Après commande de mise à 1 de la CPU jusqu'à la valeur de comparaison
Quand la CPU envoie une commande de mise à 1, la sortie TOR respective est active jusqu'à ce que la valeur de comptage corresponde à la valeur de comparaison.
Utilisation par le programme utilisateur La sortie TOR (Page 35) respective peut être commutée par la CPU via l'interface de commande (Page 147).
Remarque
Vous pouvez sélectionner la fonction Entre les valeurs de comparaison 0 et 1", si vous avez sélectionné la fonction "Utilisation par le programme utilisateur" pour la sorite TOR DQ0.
Remarque
Les fonctions "Si valeur de comparaison pour une durée d'impulsion" et "Après commande de CPU jusqu'à la valeur de comparaison" commutent la sortie TOR respective uniquement si la valeur de comparaison est atteinte par une impulsion de comptage. La sortie TOR ne commute pas avec la mise à 1 de la valeur de comptage, par ex. par synchronisation.

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position 88 Description fonctionnelle, 02/2014, A5E32010205-AB
Valeur de comparaison 0 En paramétrant la valeur de comparaison (Page 35), vous déterminez à quelle valeur de comptage la sortie TOR DQ0 commute en raison de l'événement de comparaison choisi.
Vous devez saisir une valeur supérieure ou égale à la limite inférieure de comptage et inférieure à la valeur de comparaison 1.
La valeur par défaut est "0".
Valeur de comparaison 1 En paramétrant la valeur de comparaison (Page 35), vous déterminez à quelle valeur de comptage la sortie TOR DQ1 commute en raison de l'événement de comparaison choisi.
Vous devez saisir une valeur supérieure à la valeur de comparaison 0 et inférieure ou égale à la limite supérieure de comptage.
La valeur par défaut est "10".
Sens de comptage Avec ce paramètre, vous déterminez pour quel sens de comptage la fonction choisie s'applique.
Vous avez le choix entre les options suivantes :
Sens de comptage Signification Dans les deux sens (option par défaut)
La sortie TOR respective est comparée et commutée indépendamment du sens de comptage.
Comptage La sortie TOR respective n'est comparée et commutée que dans le sens comptage.
Décomptage La sortie TOR respective n'est comparée et commutée que dans le sens décomptage.
Le paramètre est paramétrable pour les fonctions suivantes :
● Si valeur de comparaison pour une durée d'impulsion
● Après commande de mise à 1 de la CPU jusqu'à la valeur de comparaison
Durée d'impulsion En paramétrant la durée d'impulsion pour la fonction "Si valeur de comparaison pour une durée d'impulsion", vous déterminez pendant combien de millisecondes la sortie TOR respective est activée.
Si vous saisissez "0" et que la valeur de comptage correspond à la valeur de comparaison respective, la sortie TOR reste active jusqu'à la prochaine impulsion de comptage.
Une valeur comprise entre 0,0 et 6553,5 est admissible.
Le réglage par défaut est "500,0" et correspond à une durée d'impulsion de 0,5 s.

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 89
3.4.7 Hystérésis
Régler la zone d'hystérésis En paramétrant l'hystérésis (Page 54), définissez une plage autour des valeurs de comparaison. Dans la zone d'hystérésis, les sorties TOR ne peuvent pas être à nouveau commutées avant que la valeur de comptage n'ait quitté cette zone une fois.
La zone d'hystérésis se termine, indépendamment de la valeur d'hystérésis, à la limite inférieure ou supérieure de comptage. Si vous saisissez "0", l'hystérésis sera désactivée. Une valeur comprise entre 0 et 255 est admissible. La valeur par défaut est "0".
Vous pouvez paramétrer l'hystérésis uniquement en mode de fonctionnement Comptage.
3.4.8 Spécifier la valeur de mesure
Grandeur de mesure Ce paramètre vous permet de définir quelle grandeur de mesure (Page 49) le module technologique doit mettre à disposition.
Vous avez le choix entre les options suivantes :
Grandeur de mesure Signification Fréquence (option par défaut)
La grandeur de mesure est une fréquence. L'unité est le hertz (Hz).
Durée de période La grandeur de mesure est une durée de période. L'unité est la seconde (s). Vitesse La grandeur de mesure est une vitesse. Paramétrez séparément la base de
temps pour la mesure de la vitesse et les incréments par unité.

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position 90 Description fonctionnelle, 02/2014, A5E32010205-AB
Temps d'actualisation Avec le paramétrage du temps d'actualisation (Page 48) en millisecondes, définissez l'intervalle de temps entre deux actualisations de la valeur de mesure.
Le temps d'actualisation et le type de signal (Page 76) influencent la précision de la mesure. Avec des temps d'actualisation d'au moins 100 ms, l'influence du type de signal est négligeable.
Avec des temps d'actualisation inférieurs à 100 ms, atteignez la plus grande précision de mesure avec les types de signaux suivants :
● Codeur incrémental (A, B décalage de phase) avec évaluation du signal "Simple"
● Codeur incrémental (A, B, N) avec évaluation du signal "Simple"
● Impulsion (A) et sens (B)
● Impulsion (A)
Pour les autres types de signaux, la précision de la mesure dépend du codeur utilisé et de la ligne.
Si vous entrez "0", la valeur de mesure est actualisée à chaque cycle. Vous pouvez saisir jusqu'à trois décimales. Une valeur comprise entre 0,000 et 25000,000 est admissible. La valeur par défaut est "10,000".
Base de temps pour la mesure de la vitesse Avec ce paramètre, déterminez la base de temps avec laquelle la vitesse doit être mise à disposition.
Vous avez le choix entre les options suivantes :
● 1 ms
● 10 ms
● 100 ms
● 1 s
● 60 s/1 min
● La valeur par défaut est "60 s/1 min".
Incréments par unité Avec ce paramètre, déterminez le nombre d'impulsions de comptage par unité significative.
Le nombre d'impulsions de comptage dépend de l'évaluation du signal paramétrée. Une valeur comprise entre 1 et 65535 est admissible.
Exemple :
Votre codeur fournit 4000 incréments par mètre. La vitesse doit être mesurée en mètres par minute (m/min). L'évaluation du signal possède le paramètre "Double".
Dans ce cas, vous devez paramétrer les points suivants :
● Incréments par unité : 8000
● Base de temps pour la mesure de vitesse : 60 s/1 min
Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 91
3.5 Programmer High_Speed_Counter
3.5.1 Instruction High_Speed_Counter
High_Speed_Counter L'instruction High_Speed_Counter fait partie de l'objet technologique High_Speed_Counter et intègre l'alimentation de l'interface de commande et de compte-rendu du module technologique.
L'instruction High_Speed_Counter constitue ainsi l'interface logicielle entre la CPU et le module technologique. Elle est appelée cycliquement à partir du programme utilisateur pour harmoniser les données d'entrée et de sortie.
L'instruction High_Speed_Counter peut être utilisée de la même façon pour les modules technologiques des systèmes S7-1500 et ET 200SP.
Informations complémentaires Description de High_Speed_Counter (Page 93)
Paramètres d'entrée de High_Speed_Counter (Page 97)
Paramètres de sortie de High_Speed_Counter (Page 98)
Paramètre ErrorID (Page 100)
Variables statiques de High_Speed_Counter (Page 101)
Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position 92 Description fonctionnelle, 02/2014, A5E32010205-AB
3.5.2 Appeler l'instruction dans le programme utilisateur L'instruction High_Speed_Counter peut être appelée dans le cycle ou encore dans un programme commandé par horloge, une fois par compteur. Il n'est pas permis de l'appeler dans un programme d'alarme commandé par événement.
Marche à suivre Pour appeler l'instruction dans le programme utilisateur, procédez de la manière suivante :
1. Dans le navigateur du projet, ouvrez le dossier de la CPU.
2. Ouvrez le dossier "Blocs de programme".
3. Double-cliquez sur l'OB pour l'exécution cyclique du programme. Le bloc s'ouvre dans la zone de travail.
4. Ouvrez dans la fenêtre "Instructions" le groupe "Technologie" et le dossier "Comptage et mesure". Le dossier contient les instructions.
5. Sélectionnez une instruction et amenez-la dans votre OB par glisser-déplacer. La boîte de dialogue "Options d'appel" s'ouvre.
6. Sélectionnez un objet technologique dans la liste "Nom" ou saisissez le nom d'un nouvel objet technologique.
Résultat Si l'objet technologique n'existe pas encore, il est ajouté. L'instruction est insérée dans l'OB. L'objet technologique est associé à cet appel de l'instruction.

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 93
3.5.3 Description de High_Speed_Counter
Description Avec l'instruction High_Speed_Counter, commandez les fonctions de comptage et de mesure du module technologique via le programme utilisateur.
Appel L'instruction High_Speed_Counter doit être appelée dans le cycle ou encore dans un programme commandé par horloge, une fois par compteur. Il n'est pas permis de l'appeler dans un programme d'alarme commandé par événement.
Fonctionnement Valeur de comptage : La valeur de comptage est disponible au paramètre de sortie CountValue. La valeur de comptage est actualisée à chaque appel de l'instruction High_Speed_Counter.
Valeur de mesure : la valeur de mesure est disponible au paramètre de sortie MeasuredValue. Le module technologique relit la valeur de mesure à chaque appel de l'instruction High_Speed_Counter.
Les valeurs de mesure et de comptage sont disponibles en parallèle dans l'interface de compte rendu.
Capture : le paramètre de sortie CaptureStatus = TRUE affiche une valeur de Capture valide dans le paramètre de sortie CapturedValue an.
● Une valeur de Capture est acquise dans les conditions suivantes :
– Une entrée TOR a le paramétrage "Capture"
– CaptureEnable = TRUE
– Front à l'entrée TOR avec la fonction de Capture
● Le paramètre de sortie CaptureStatus est remis à 0 par un front descendant au paramètre d'entrée CaptureEnable.

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position 94 Description fonctionnelle, 02/2014, A5E32010205-AB
Synchronisation : Le paramètre de sortie SyncStatus = TRUE indique qu'une synchronisation est survenue.
● Une valeur de comptage est synchronisée dans les conditions suivantes :
– Une entrée TOR a le paramétrage "Synchronisation" ou le codeur incrémental a le paramétrage "Synchronisation en cas de signal N"
– SyncEnable = TRUE
– SyncUpDirection (ou SyncDownDirection) = TRUE
– Front à l'entrée TOR avec la fonction de synchronisation ou front montant du signal N à l'entrée du codeur
● Le paramètre de sortie SyncStatus est remis à 0 par un front descendant au
– paramètre d'entrée SyncEnable ou
– à la variable statique SyncDownDirection ou
– à la variable statique SyncUpDirection
Modification de paramètre via le programme utilisateur
Si vous souhaitez modifier des paramètres via le programme utilisateur, procédez de la manière suivante :
1. Vérifiez à l'aide de la variable Set respective si l'objet technologique est prêt pour la modification de paramètre (variable Set = FALSE) ou si une commande de modification est encore en cours (variable Set = TRUE).
2. Quand l'objet technologique est prêt pour la modification de paramètre, modifiez la variable statique respective.
3. Mettez à 1 la variable Set respective pour l'exécution de la commande de modification.
4. Vérifiez à l'aide du paramètre de sortie Error si une erreur s'est produite. Si aucune erreur ne s'est produite et que la variable Set est automatiquement remise à 0 par l'objet technologique, la modification de paramètre a réussi.
Limite de comptage inférieure ou supérieure : Les deux limites sont modifiées via le programme utilisateur de la manière suivante :
1. Contrôle de la variable statique SetUpperLimit (ou SetLowerLimit) = FALSE
2. Modification de la variable statique NewUpperLimit (ou NewLowerLimit)
3. SetUpperLimit (ou SetLowerLimit) = TRUE
4. Contrôle de la nouvelle limite de comptage dans les variables statiques CurUpperLimit ou CurLowerLimit
Remarque
Si la nouvelle limite supérieure de comptage est inférieure à la valeur de comptage actuelle, la valeur de comptage est mise à la limite inférieure de comptage ou à la valeur initiale selon le paramétrage. Si la nouvelle limite inférieure de comptage est supérieure à la valeur de comptage actuelle, la valeur de comptage est mise à la limite supérieure de comptage ou à la valeur initiale selon le paramétrage.

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 95
Valeurs de comparaison : Les deux valeurs de comparaison sont modifiées via le programme utilisateur de la manière suivante :
1. Contrôle de la variable statique SetReferenceValue0 (ou ReferenceValue1) = FALSE
2. Modification de la variable statique NewReferenceValue0 (ou NewReferenceValue1)
3. SetReferenceValue0 (ou SetReferenceValue1) = TRUE
4. Contrôle de la nouvelle valeur de comparaison dans la variable statique CurReferenceValue0 (ou CurReferenceValue1)
Valeur de comptage : Vous pouvez régler l'actuelle valeur de comptage sur une nouvelle valeur à partir du programme utilisateur. L'actuelle valeur de comptage est modifiée de la manière suivante :
1. Contrôle du paramètre d'entrée SetCountValue = FALSE
2. Modification de la variable statique NewCountValue
3. SetCountValue = TRUE
4. Contrôle de la nouvelle valeur de comptage dans le paramètre de sortie CountValue
Valeur initiale : La valeur initiale est modifiée via le programme utilisateur de la manière suivante :
1. Contrôle de la variable statique SetStartValue = FALSE
2. Modification de la variable statique NewStartValue
3. SetStartValue = TRUE
4. Contrôle de la nouvelle valeur initiale dans la variable statique CurStartValue
Acquittement des événements Procédez à l'acquittement d'événements signalés via le front montant du paramètre d'entrée EventAck. EventAck doit rester à 1 jusqu'à ce que l'objet technologique ait remis à 0 simultanément les bits d'état des événements suivants de la voie de comptage :
● CompResult0
● CompResult1
● ZeroStatus
● PosOverflow
● NegOverflow
Etat des entrées TOR Vous obtenez l'état des entrées TOR au moyen des variables statiques StatusDI0, StatusDI1 et StatusDI2.

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position 96 Description fonctionnelle, 02/2014, A5E32010205-AB
Utilisation des sorties TOR par le programme utilisateur Vous pouvez positionner les sorties TOR au moyen de l'instruction High_Speed_Counter
● quand "Définir sortie" est paramétré sur "Utilisation par le programme utilisateur"
● quand "Définir sortie" est paramétré sur "Après commande de mise à 1 de la CPU jusqu'à la valeur de comparaison"
● quand vous mettez à 1 la variable statique ManualCtrlDQm respective (écrasement temporaire).
Les variables statiques SetDQ0 et SetDQ1 n'ont d'effet que dans ces cas. Dans le premier et le troisième cas, DQm suit la valeur de SetDQm. Dans le second cas, DQm est mise à 1 avec un front (montant ou descendant) de SetDQm. DQm est remise à 0 lorsque la valeur de comptage correspond à la valeur de comparaison.
Comportement en cas d'erreur Si une erreur s'est produite lors de l'appel de l'instruction ou dans le module technologique, le paramètre de sortie est mis sur Error. Les informations d'erreur complémentaires peuvent alors être lues au paramètre de sortie ErrorID.
Eliminez la cause de l'erreur et acquittez le message d'erreur en mettant à 1 le paramètre d'entrée ErrorAck. Quand il n'y a plus d'erreur, l'objet technologique remet à 0 le paramètre de sortie Error. Aucune nouvelle erreur n'est signalée tant que vous n'avez pas acquitté l'erreur précédente.
Changement du sens de comptage Le programme utilisateur ne peut inverser le sens de comptage que si le type de signal paramétré est "Impulsion (A)". Dans tous les autres cas, le sens de comptage est déterminé par les signaux d'entrée du module technologique. Le sens de comptage peut être commandé par la variable statique NewDirection :
● +1: sens comptage
● -1: sens décomptage
Pour exécuter la commande de changement de sens, il est nécessaire de mettre à 1 la variable SetNewDirection = TRUE.
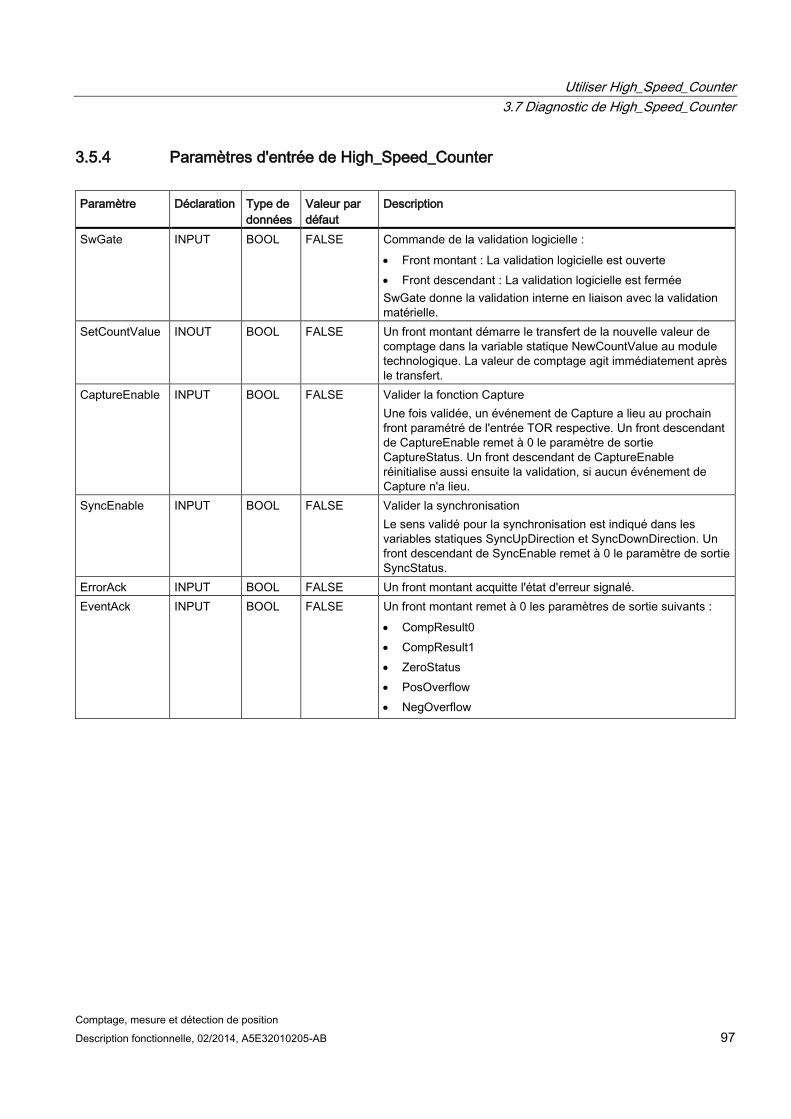
Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 97
3.5.4 Paramètres d'entrée de High_Speed_Counter Paramètre Déclaration Type de
données Valeur par défaut
Description
SwGate INPUT BOOL FALSE Commande de la validation logicielle : • Front montant : La validation logicielle est ouverte • Front descendant : La validation logicielle est fermée SwGate donne la validation interne en liaison avec la validation matérielle.
SetCountValue INOUT BOOL FALSE Un front montant démarre le transfert de la nouvelle valeur de comptage dans la variable statique NewCountValue au module technologique. La valeur de comptage agit immédiatement après le transfert.
CaptureEnable INPUT BOOL FALSE Valider la fonction Capture Une fois validée, un événement de Capture a lieu au prochain front paramétré de l'entrée TOR respective. Un front descendant de CaptureEnable remet à 0 le paramètre de sortie CaptureStatus. Un front descendant de CaptureEnable réinitialise aussi ensuite la validation, si aucun événement de Capture n'a lieu.
SyncEnable INPUT BOOL FALSE Valider la synchronisation Le sens validé pour la synchronisation est indiqué dans les variables statiques SyncUpDirection et SyncDownDirection. Un front descendant de SyncEnable remet à 0 le paramètre de sortie SyncStatus.
ErrorAck INPUT BOOL FALSE Un front montant acquitte l'état d'erreur signalé. EventAck INPUT BOOL FALSE Un front montant remet à 0 les paramètres de sortie suivants :
• CompResult0 • CompResult1 • ZeroStatus • PosOverflow • NegOverflow

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position 98 Description fonctionnelle, 02/2014, A5E32010205-AB
3.5.5 Paramètres de sortie de High_Speed_Counter Paramètre Déclaration Type de
données Valeur par défaut
Description
StatusHW OUTPUT BOOL FALSE Bit d'état du module technologique : le module est paramétré et prêt à fonctionner. Les données du module sont valables.
StatusGate OUTPUT BOOL FALSE Bit d'état : La validation interne est donnée quand le paramètre est mis à 1
StatusUp OUTPUT BOOL FALSE Bit d'état : La dernière impulsion de comptage a incrémenté le compteur et remonte à 0,5 s au maximum.
StatusDown OUTPUT BOOL FALSE Bit d'état : La dernière impulsion de comptage a décrémenté le compteur et remonte à 0,5 s au maximum.
CompResult0 OUTPUT BOOL FALSE Bit d'état : Événement de comparaison apparu pour DQ0 Au moyen du front montant du paramètre d'entrée EventAck, réinitialisez CompResult0.
CompResult1 OUTPUT BOOL FALSE Bit d'état : Evénement de comparaison apparu pour DQ1 Au moyen du front montant du paramètre d'entrée EventAck, réinitialisez CompResult1.
SyncStatus OUTPUT BOOL FALSE Bit d'état : Synchronisation apparue Si le paramètre d'entrée SyncEnable est mis à 1, le front paramétré met à 1 le bit d'état SyncStatus à l'entrée TOR respective. SyncStatus est remis à 0 par un front descendant de • SyncEnable (paramètre d'entrée) ou • SyncUpDirection (variable statique) ou • SyncDownDirection (variable statique)
CaptureStatus OUTPUT BOOL FALSE Bit d'état : Événement de Capture apparu Si le paramètre d'entrée CaptureEnable est mis à 1, le front paramétré met à 1 le bit d'état CaptureStatus. à l'entrée TOR respective. Le front descendant du paramètre d'entrée CaptureEnable remet CaptureStatus à 0.
ZeroStatus OUTPUT BOOL FALSE Bit d'état : CountValue a atteint la valeur de "0" Au moyen du front montant du paramètre d'entrée EventAck, réinitialisez ZeroStatus.
PosOverflow OUTPUT BOOL FALSE Bit d'état : CountValue a dépassé la limite supérieure de comptage Au moyen du front montant du paramètre d'entrée EventAck, réinitialisez PosOverflow.
NegOverflow OUTPUT BOOL FALSE Bit d'état : CountValue a dépassé la limite inférieure de comptage Au moyen du front montant du paramètre d'entrée EventAck, réinitialisez NegOverflow.
Error OUTPUT BOOL FALSE Une erreur s'est produite. La cause d'erreur est indiquée par le paramètre de sortie ErrorID.

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 99
Paramètre Déclaration Type de données
Valeur par défaut
Description
ErrorID OUTPUT WORD 0 Le paramètre ErrorID (Page 100) indique le numéro du message d'erreur. ErrorID = 0000H : Pas de présence d'erreur.
CountValue OUTPUT DINT 0 Valeur de comptage actuelle CapturedValue OUTPUT DINT 0 Dernière valeur de Capture acquise ; CaptureStatus = TRUE, si
un nouvel événement de Capture est apparu MeasuredValue OUTPUT REAL 0.0 Valeur actuelle de mesure pour la fréquence, la période ou la
vitesse (selon le paramétrage)

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position 100 Description fonctionnelle, 02/2014, A5E32010205-AB
3.5.6 Paramètre ErrorID Code d'erreur (W#16#...)
Description
0000 Pas d'erreur Messages d'erreur du module technologique 80A1 POWER_ERROR de l'interface de compte rendu : Tension d'alimentation L+ erronée 80A2 ENC_ERROR de l'interface de compte rendu : Signal de capteur erroné 80A3 LD_ERROR de l'interface de compte rendu : Erreur lors du chargement via l'interface de commande Messages d'erreur de l'instruction High_Speed_Counter 80B1 Sens de comptage non valable 80B4 La nouvelle limite inférieure de comptage ne remplit pas les conditions suivantes :
• Limite inférieure de comptage < Limite supérieure de comptage • Limite inférieure de comptage <= Valeur de comparaison/Valeur de comptage/Valeur initiale
80B5 La nouvelle limite supérieure de comptage ne remplit pas les conditions suivantes : • Limite inférieure de comptage < Limite supérieure de comptage • Limite supérieure de comptage >= Valeur de comparaison/Valeur de comptage/Valeur initiale
80B6 La nouvelle valeur initiale ne répond pas à la condition suivante : • limite inférieure de comptage <= valeur initiale <= limite supérieure de comptage
80B7 La nouvelle valeur de comptage ne répond pas à la condition suivante : • Limite inférieure de comptage <= Valeur de comptage <= Limite supérieure de comptage
80B8 La nouvelle valeur de comparaison 0 ne répond pas aux conditions suivantes : • Limite inférieure de comptage <= Valeur de comparaison 0 <= Limite supérieure de comptage • valeur de comparaison 0 < valeur de comparaison 1
80B9 La nouvelle valeur de comparaison 1 ne répond pas aux conditions suivantes : • Limite inférieure de comptage <= Valeur de comparaison 1 <= Limite supérieure de comptage • valeur de comparaison 0 < valeur de comparaison 1
80C0 L'instruction High_Speed_Counter a été appelée plusieurs fois par la même instance (DB) 80C1 La communication avec le module technologique a échoué (lecture des blocs de données) : Les
informations d'erreur de l'instruction interne RDREC sont consignées dans la variable statique AdditionalErrorID
80C2 La communication avec le module technologique a échoué (enregistrements en écriture) : Les informations d'erreur de l'instruction interne WRREC sont consignées dans la variable statique AdditionalErrorID
80C3 L'accès aux données d'entrée (interface de compte-rendu) a échoué : Les informations d'erreur de l'instruction interne GETIO_PART sont consignées dans la variable statique AdditionalErrorID
80C4 L'accès aux données de sortie (interface de commande) a échoué : Les informations d'erreur de l'instruction interne SETIO_PART sont consignées dans la variable statique AdditionalErrorID
80C5 La lecture des informations actuelles de démarrage de l'OB a échoué : Les informations d'erreur de l'instruction interne RD_SINFO sont consignées dans la variable statique AdditionalErrorID
80C6 La détermination des adresses d'E/S du module technologique a échoué : Les informations d'erreur de l'instruction interne RD_ADDR sont consignées dans la variable statique AdditionalErrorID

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 101
3.5.7 Variables statiques de High_Speed_Counter Variable Type de
données Valeur par défaut
Accès Description
NewCountValue DINT L#0 Écriture Nouvelle valeur de comptage NewReferenceValue0 DINT L#0 Écriture Nouvelle valeur de comparaison 0 NewReferenceValue1 DINT L#10 Écriture Nouvelle valeur de comparaison 1 NewUpperLimit DINT L#2147483647 Écriture Nouvelle limite supérieure de comptage NewLowerLimit DINT L#-2147483648 Écriture Nouvelle limite inférieure de comptage NewStartValue DINT L#0 Écriture Nouvelle valeur initiale CurReferenceValue0 DINT L#0 Lecture Valeur de comparaison 0 actuelle CurReferenceValue1 DINT L#10 Lecture Valeur de comparaison 1 actuelle CurUpperLimit DINT L#2147483647 Lecture Limite supérieure de comptage actuelle CurLowerLimit DINT L#-2147483648 Lecture Limite inférieure de comptage actuelle CurStartValue DINT L#0 Lecture Valeur initiale actuelle NewDirection INT 0 Écriture Nouveau sens de comptage :
+1: sens comptage -1: sens décomptage
AdditionalErrorID WORD W#16#0000 Lecture Informations d'erreur d'une instruction interne, par ex. RDREC
UserCmdFlags STRUCT - SetNewDirection BOOL FALSE Écriture Définir un nouveau sens de comptage SetUpperLimit BOOL FALSE Écriture Définir la limite supérieure SetLowerLimit BOOL FALSE Écriture Définir la limite inférieure SetReferenceValue0 BOOL FALSE Écriture Définir la valeur de comparaison 0 SetReferenceValue1 BOOL FALSE Écriture Définir la valeur de comparaison 1 SetStartValue BOOL FALSE Écriture Définir la valeur initiale : SyncDownDirection BOOL TRUE Écriture Valider la synchronisation dans le sens
décomptage SyncUpDirection BOOL TRUE Écriture Valider la synchronisation dans le sens
comptage SetDQ0 BOOL FALSE Écriture Définir la sortie TOR DQ0 SetDQ1 BOOL FALSE Écriture Définir la sortie TOR DQ1 ManualCtrlDQ0 BOOL FALSE Écriture Valider la mise à 1 de la sortie TOR DQ0 :
TRUE: • SetDQ0 met à 1 DQ0 • Bit de commande TM_CTRL_DQ0 = FALSE FALSE: • La mise à 1 n'est pas validée • Bit de commande TM_CTRL_DQ0 = TRUE

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position 102 Description fonctionnelle, 02/2014, A5E32010205-AB
Variable Type de données
Valeur par défaut
Accès Description
ManualCtrlDQ1 BOOL FALSE Écriture Valider la mise à 1 de la sortie TOR DQ1 : TRUE: • SetDQ1 met à 1 DQ1 • Bit de commande TM_CTRL_DQ1 = FALSE FALSE: • La mise à 1 n'est pas validée • Bit de commande TM_CTRL_DQ1 = TRUE
UserStatusFlags STRUCT - StatusDI0 BOOL FALSE Lecture État actuel de l'entrée TOR DI0 StatusDI1 BOOL FALSE Lecture État actuel de l'entrée TOR DI1 StatusDI2 BOOL FALSE Lecture État actuel de l'entrée TOR DI2 StatusDQ0 BOOL FALSE Lecture État actuel de la sortie TOR DQ0 StatusDQ1 BOOL FALSE Lecture État actuel de la sortie TOR DQ1

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 103
3.6 Mise en service de High_Speed_Counter
3.6.1 Mettre l'objet technologique en service L'éditeur de mise en service vous aide à mettre en service l'objet technologique et à tester ses fonctions. Vous pouvez modifier certains paramètres de l'instruction High_Speed_Counter dans le mode en ligne de la CPU ou de l'IM et en observer les effets.
Conditions requises ● Il existe une connexion en ligne entre STEP 7 (TIA-Portal) et la CPU.
● La CPU est à l'état de fonctionnement RUN.
● L'instruction High_Speed_Counter correspondante est appelée cycliquement à partir du programme utilisateur.
● Les paramètres de l'objet technologique ne sont pas écrasés à partir du programme utilisateur.
Marche à suivre Pour ouvrir l'éditeur de mise en service d'un objet technologique, procédez de la manière suivante :
1. Dans la navigation de projet, ouvrez le dossier "Objets technologiques".
2. Dans la navigation de projet, ouvrez l'objet technologique High_Speed_Counter.
3. Double-cliquez sur l'objet "Mise en service". Les fonctions de mise en service de l'objet technologique High_Speed_Counter s'affichent.
4. Cliquez sur le bouton "Démarrer l'affichage". Les paramètres (valeurs en ligne) de l'objet technologique High_Speed_Counter sont chargés et affichés.

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position 104 Description fonctionnelle, 02/2014, A5E32010205-AB
Mode en ligne En mode en ligne, vous pouvez modifier les paramètres suivants et tester ainsi le fonctionnement de l'objet technologique :
● Nouvelle valeur de comptage (NewCountValue)
● Nouvelle limite de comptage supérieure (NewUpperLimit)
● Nouvelle limite de comptage inférieure (NewLowerLimit)
● Nouvelle valeur de comparaison 0 (NewReferenceValue0)
● Nouvelle valeur de comparaison 1 (NewReferenceValue1)
● Nouvelle valeur initiale (NewStartValue)
● Démarrer et arrêter le compteur (SwGate)
● Valider Capture (CaptureEnable)
● Valider la synchronisation (SyncEnable)
● Acquitter des erreurs signalées (ErrorAck)
● Remise à 0 des drapeaux d'état (EventAck)
Les valeurs modifiées sont opérantes par abandon du champ de saisie ou actionnement d'ENTER ou par une autre mise à 1 de la variable Set respective comme nouveaux paramètres de l'objet technologique.
Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 105
3.7 Diagnostic de High_Speed_Counter
3.7.1 Observer les valeurs de comptage, de mesure, les entrées (DI) et sorties TOR (DQ)
Avec les fonctions de diagnostic, vous surveillez les fonctions de comptage et de mesure.
Conditions requises ● Il existe une connexion en ligne entre STEP 7 (TIA Portal) et la CPU.
● La CPU est à l'état de fonctionnement ARRET.
Marche à suivre Pour ouvrir l'éditeur d'affichage pour les fonctions de diagnostic, procédez de la manière suivante :
1. Dans la navigation de projet, ouvrez le dossier "Objets technologiques".
2. Dans la navigation de projet, ouvrez l'objet technologique High_Speed_Counter.
3. Double-cliquez sur l'objet "Diagnostic".

Utiliser High_Speed_Counter 3.7 Diagnostic de High_Speed_Counter
Comptage, mesure et détection de position 106 Description fonctionnelle, 02/2014, A5E32010205-AB
Affichage Les valeurs suivantes sont lues par l'objet technologique et affichées :
● Affichage d'événement/Informations de diagnostic
● Etats logiques des entrées TOR et des sorties TOR
● Valeur de comptage
● Valeur de Capture
● Valeur de mesure
Pour plus d'informations sur les affichages d'état, référez-vous à l'aide contextuelle de chaque événement dans STEP 7 (TIA-Portal). Si la CPU est en STOP, l'affichage d'état n'est pas mis à jour.

Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 107
Utiliser le module technologique 4 4.1 Configurer le module
4.1.1 Ajouter un module technologique à la configuration matérielle
Marche à suivre La configuration d'un module technologique suppose la création préalable d'un projet dans lequel vous pouvez enregistrer les données de configuration.
1. Ouvrez la configuration de la CPU ou de l'IM.
2. Sélectionnez un châssis.
3. Sélectionnez le module technologique à partir du catalogue des modules : "TM > Comptage ou Détection de position > Module technologique > N° de référence"
4. Amenez le module technologique par glisser-déplacer jusqu'à l'emplacement souhaité dans le châssis.
Résultat Dans la navigation de projet, le nouveau module technologique est affiché avec les objets suivants sous "Modules locaux" ou "Périphérie décentralisée". Un double-clic ouvre l'éditeur souhaité.
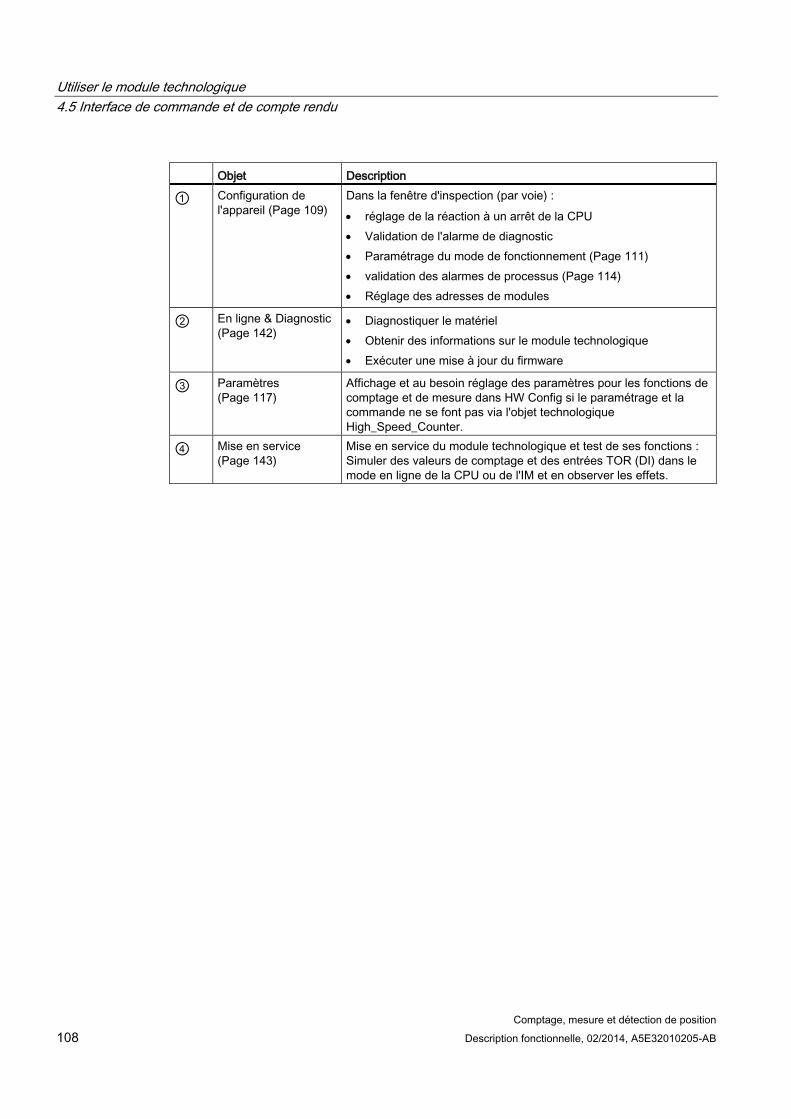
Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position 108 Description fonctionnelle, 02/2014, A5E32010205-AB
Objet Description
① Configuration de l'appareil (Page 109)
Dans la fenêtre d'inspection (par voie) : • réglage de la réaction à un arrêt de la CPU • Validation de l'alarme de diagnostic • Paramétrage du mode de fonctionnement (Page 111) • validation des alarmes de processus (Page 114) • Réglage des adresses de modules
② En ligne & Diagnostic (Page 142)
• Diagnostiquer le matériel • Obtenir des informations sur le module technologique • Exécuter une mise à jour du firmware
③ Paramètres (Page 117)
Affichage et au besoin réglage des paramètres pour les fonctions de comptage et de mesure dans HW Config si le paramétrage et la commande ne se font pas via l'objet technologique High_Speed_Counter.
④ Mise en service (Page 143)
Mise en service du module technologique et test de ses fonctions : Simuler des valeurs de comptage et des entrées TOR (DI) dans le mode en ligne de la CPU ou de l'IM et en observer les effets.

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 109
4.1.2 Paramètres de base
4.1.2.1 Réaction à un arrêt de la CPU
Réaction à un arrêt de la CPU C'est dans les paramètres de base de la configuration de l'appareil que vous réglez la réaction du module technologique en cas d'arrêt de la CPU.
Tableau 4- 1 Réaction du module technologique à un arrêt de la CPU en fonction du paramétrage (par voie)
Paramètres de base Réaction à un arrêt de la CPU Poursuivre l'opération Le module technologique poursuit son travail en étant
complètement opérationnel. Les impulsions de comptage entrantes sont traitées ou la position réelle est lue. Les sorties TOR continuent de commuter selon leur paramétrage.
Sortir valeur de remplacement Le module technologique fournit les valeurs de remplacement paramétrées aux sorties TOR jusqu'au passage de la CPU de STOP à RUN. Après un passage de STOP à RUN, le module technologique passe à l'état de mise en route : La valeur de comptage est mise à la valeur initiale (pour les codeurs incrémentaux ou les générateurs d'impulsion) et les sorties TOR commutent selon le paramétrage.
Conserver la dernière valeur Le module technologique fournit aux sorties TOR les valeurs valides au moment du passage en STOP et ce jusqu'au passage de la CPU de STOP à RUN. Après un passage de STOP à RUN, le module technologique passe à l'état de mise en route : La valeur de comptage est mise à la valeur initiale (pour les codeurs incrémentaux ou les générateurs d'impulsion) et les sorties TOR commutent selon le paramétrage.
Valeur de remplacement pour DQ0 Avec ce paramètre, déterminez pour le comportement "Sortir la valeur de remplacement" quelle valeur le module technologique doit fournir en cas de STOP de la CPU à la sortie TOR DQ0.
Valeur de remplacement pour DQ1 Avec ce paramètre, déterminez pour le comportement "Sortir la valeur de remplacement" quelle valeur le module technologique doit fournir à la sortie TOR DQ1 en cas de STOP de la CPU.

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position 110 Description fonctionnelle, 02/2014, A5E32010205-AB
4.1.2.2 Alarmes de diagnostic Le module technologique peut déclencher des alarmes de diagnostic supplémentaires quand vous activez la validation des alarmes de diagnostic dans les paramètres de base. Vous traitez les alarmes de diagnostic dans un OB d'alarme.
Validation alarme de diagnostic en cas de rupture de fil Ce paramètre vous permet de déterminer pour les codeurs suivants si une alarme de diagnostic est déclenchée en cas de rupture de fil des signaux utilisés :
● Codeur 24 V (Page 59) à commutation push-pull
● Codeur RS422 (Page 62) (surveillance additionnelle pour détecter un court-circuit et une tension manquante)
● Codeur absolu SSI (Page 64) (surveillance additionnelle pour détecter un court-circuit et une tension de défaut)
Remarque
Si vous utilisez un codeur avec un autre type de capteur ou une autre norme d'interface, il est possible qu'une rupture de fil ne puisse pas être détectée.
Validation d'autres alarmes de diagnostic Ce paramètre vous permet de déterminer si des alarmes de diagnostic sont déclenchées en cas d'erreurs supplémentaires.
Référez-vous au manuel du module technologique pour savoir quelles erreurs peuvent déclencher une alarme de diagnostic pendant le fonctionnement.

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 111
4.1.2.3 Mode de fonctionnement
Sélection du mode de fonctionnement pour la voie Avec ce réglage, déterminez comment le paramétrage et la commande des fonctions de comptage et de mesure de la voie doivent s'effectuer.
Mode de fonctionnement Description Fonctionnement avec objet technologique
Le paramétrage de la voie se fait via l'objet technologique High_Speed_Counter. L'instruction High_Speed_Counter correspondante intègre l'accès à l'interface de commande et de compte rendu du module technologique dans le programme utilisateur. Déterminez l'association entre module technologique/voie et objet technologique au début du paramétrage de l'objet technologique : voir Paramètres de base de l'objet technologique (Page 75) En cas d'utilisation de l'objet technologique High_Speed_Counter, le mode de fonctionnement Comptage est automatiquement défini.
Détection de position pour Motion Control
Le module technologique sert de détection de position pour une commande Motion Control de niveau supérieur. Dans ce cas, toutes les voies du module technologique sont disponibles pour Motion Control. Le paramétrage s'effectue via la configuration de l'appareil du module technologique. Le paramétrage des signaux de codeur s'effectue via les paramètres de module (Page 112).
Fonctionnement manuel Le paramétrage de la voie s'effectue via le paramétrage (HW Config) (Page 119) du module technologique. Vous avez un accès direct à l'interface de commande et de compte rendu du module technologique via le programme utilisateur.
Sélection du mode de fonctionnement pour la voie Avec ce paramètre, déterminez pour le "Mode manuel" pour quelle fonction la voie du module technologique est utilisée. En fonction de cela, les possibilités de réglage sont adaptées sous "Paramètres" (HW Config).
Mode de fonctionnement Description Comptage (Page 15) / détection de position (Page 17)
La fonction Comptage ou Détection de position est la fonction principale du module technologique. Les fonctions de comparaison et les alarmes de processus utilisent la valeur de comptage ou la valeur de position. La valeur de mesure est disponible en parallèle.
Mesure (Page 46) La fonction Mesure est la fonction principale du module technologique. Les fonctions de comparaison (Page 127) et les alarmes de processus pour les événements de comparaison fonctionnent avec la valeur de mesure. La valeur de comptage est disponible en parallèle.

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position 112 Description fonctionnelle, 02/2014, A5E32010205-AB
4.1.2.4 Paramètres de module (détection de position pour Motion Control) En mode de fonctionnement "Détection de position pour Motion Control", réglez les paramètres des signaux de codeur de la voie sous "Paramètres de module". Les paramètres dépendent du codeur utilisé.
Paramètres de module pour codeur incrémental et générateur d'impulsions Si vous utilisez un codeur incrémental ou un générateur d'impulsions, réglez les paramètres suivants pour les signaux de codeur de la voie.
● Type de signal
● Inverser le sens
● Evaluation du signal
● Fréquence de filtre
● Type de capteur(pour TM Count)
● Norme d'interface (pour TM PosInput)
● Sélection de signal pour repère de référence 0
● Incréments par unité et
● Vitesse de rotation de référence
Référez-vous au paragraphe Entrées de comptage (Page 76) pour obtenir des explications sur les six premiers paramètres.
Paramètres de module pour codeur absolu SSI Si vous utilisez un TM PosInput avec un codeur absolu SSI, réglez les paramètres suivants pour les signaux de codeur de la voie.
● Type de signal
● Inverser le sens
● Longueur du télégramme
● Type de code
● Vitesse de transmission
● Période de la bascule monostable
● Parité
● Numéro de bit du LSB de la valeur de position
● Numéro de bit du MSB de la valeur de position
● Incréments par unité et
● Vitesse de rotation de référence
Référez-vous au paragraphe Paramétrer la détection de position avec codeur absolu SSI (Page 129) pour obtenir des explications sur les neuf premiers paramètres.

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 113
Sélection de signal pour repère de référence 0 Avec ce paramètre, déterminez en cas d'utilisation d'un S7-1500 Motion Control pour quel signal de référence externe un nouveau repère de référence est mémorisé pour la position du codeur.
Vous avez le choix entre les options suivantes : Option Signification DI0 Avec un front montant de l'entrée TOR DI0, la valeur actuelle de
comptage est mémorisée comme nouveau repère de référence pour la position du codeur.
Signal N du codeur incrémental Avec un front montant du signal N du codeur incrémental, la valeur actuelle de comptage est mémorisée comme nouveau repère de référence pour la position du codeur.
Incréments par unité En cas d'utilisation d'un codeur incrémental ou d'un générateur d'impulsions, vous définissez avec ce paramètre le nombre d'impulsions de comptage par tour de codeur. En cas d'utilisation d'un codeur absolu SSI, vous définissez avec ce paramètre le nombre d'incréments que le codeur fournit par tour.
Le nombre d'impulsions de comptage dépend de l'évaluation du signal paramétrée. Une valeur comprise entre 1 et 65535 est admissible.
Exemple de codeur incrémental ou de générateur d'impulsions :
Votre codeur incrémental ou votre générateur d'impulsions fournit 2048 incréments par tour. Selon l'évaluation du signal, vous devez dans ce cas paramétrer les points suivants :
Evaluation du signal Incréments par unité Simple 2048 Double 4096 Quadruple 8192
Vitesse de rotation de référence En cas d'utilisation d'un S7-1500 Motion Control, le codeur transfère la mesure de la vitesse de rotation comme pourcentage relatif à la vitesse de rotation de référence. Avec ce paramètre, vous déterminez la vitesse de rotation en U/min qui doit correspondre à la valeur 100 %. La vitesse de rotation de référence doit être identique au réglage dans la commande.
Une valeur comprise entre 6,00 et 210000,00 est admissible. La valeur par défaut est "3000,00".
Autre configuration Vous effectuez l'autre configuration via l'objet technologique "TO_ExternalEncoder" de S7-1500 Motion Control. Veuillez vous référer à la description fonctionnelle S7-1500 Motion Control (http://support.automation.siemens.com/WW/view/fr/59381279) pour en apprendre davantage sur la configuration et la mise en service de la détection de position.

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position 114 Description fonctionnelle, 02/2014, A5E32010205-AB
4.1.2.5 Alarmes de processus Dans les paramètres de base du module technologique, vous pouvez régler pour chaque voie quels événements doivent déclencher une alarme de processus pendant le fonctionnement.
Dans un système S7-1500, entrez un nom d'événement approprié pour chaque alarme de processus validée et associez un OB d'alarme de processus correspondant à chaque alarme de processus. Si une alarme de processus est déclenchée, l'OB respectif est démarré pour évaluer les données de l'alarme.
Une alarme de processus se déclenche lorsque la condition de la modification du bit d'état ou d'événement correspondant est remplie dans l'interface de compte rendu.
Alarme de processus perdue Si un événement devant déclencher une alarme de processus se produit alors que le même événement précédent n'a pas encore été pris en charge, aucune nouvelle alarme de processus n'est déclenchée. L'alarme de processus est perdue. Selon le paramétrage, cela peut déclencher l'alarme de diagnostic "Alarme de processus perdue".
Alarmes de processus activables Alarme de processus
Disponible en mode de fonctionnement Comptage avec utilisation d'un
Disponible en mode de fonctionnement Comptage avec utilisation d'un
Disponible en mode de fonctionne-ment Détection de position pour Motion Control
Description Numéro EventType
Codeur in-crémental ou géné-rateur d'im-pulsions
Codeur absolu SSI
Codeur in-crémental ou géné-rateur d'im-pulsions
Codeur absolu SSI
Nouvelle valeur de Capture disponible
Oui Oui Non Non Non Alarme de processus d'enregistrement de la valeur actuelle de comptage ou de position comme valeur Capture
8
Synchroni-sation du compteur par signal externe
Oui Non Oui Non Non Alarme de processus de synchronisation du compteur par signal N ou front d'entrée TOR (DI)
9
Début de validation
Oui Non Oui Non Non Alarme de processus en cas de validation interne
1
Fin de validation
Oui Non Oui Non Non Alarme de processus en cas d'inhibition interne
2

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 115
Alarme de processus
Disponible en mode de fonctionnement Comptage avec utilisation d'un
Disponible en mode de fonctionnement Comptage avec utilisation d'un
Disponible en mode de fonctionne-ment Détection de position pour Motion Control
Description Numéro EventType
Codeur in-crémental ou géné-rateur d'im-pulsions
Codeur absolu SSI
Codeur in-crémental ou géné-rateur d'im-pulsions
Codeur absolu SSI
Dépassement haut (limite supérieure de comptage dépassée)
Relatif à la valeur de comptage
Non Relatif à la valeur de comptage
Non Non Alarme de processus si la valeur de comptage dépasse la limite supérieure de comptage
3
Dépassement bas (limite inférieure de comptage dépassée)
Relatif à la valeur de comptage
Non Relatif à la valeur de comptage
Non Non Alarme de processus si la valeur de comptage passe en dessous de la limite inférieure de comptage
4
Inversion du sens*
Relatif à la valeur de comptage
Relatif à la valeur de position
Relatif à la valeur de comptage
Relatif à la valeur de position
Non Alarme de processus en cas d'inversion du sens de la valeur de comptage ou de position
10
Passage à zéro
Relatif à la valeur de comptage
Relatif à la valeur de position
Relatif à la valeur de comptage
Relatif à la valeur de position
Non Alarme de processus en cas de passage à zéro de la valeur de comptage ou de position
7

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position 116 Description fonctionnelle, 02/2014, A5E32010205-AB
Alarme de processus
Disponible en mode de fonctionnement Comptage avec utilisation d'un
Disponible en mode de fonctionnement Comptage avec utilisation d'un
Disponible en mode de fonctionne-ment Détection de position pour Motion Control
Description Numéro EventType
Codeur in-crémental ou géné-rateur d'im-pulsions
Codeur absolu SSI
Codeur in-crémental ou géné-rateur d'im-pulsions
Codeur absolu SSI
Evénement de comparaison pour DQ0
Relatif à la valeur de comptage
Relatif à la valeur de position
Relatif à la valeur de mesure
Relatif à la valeur de mesure
Non Alarme de processus si un événement de comparaison apparaît pour DQ0 en raison de la condition de comparaison choisie ; Pas d'alarme de processus si la modification de la valeur de comptage n'a pas été provoquée par une impulsion de comptage pour un codeur incrémental ou un générateur d'impulsions
5
Evénement de comparaison pour DQ1
Relatif à la valeur de comptage
Relatif à la valeur de position
Relatif à la valeur de mesure
Relatif à la valeur de mesure
Non Alarme de processus si un événement de comparaison apparaît pour DQ1 en raison de la condition de comparaison choisie ; Pas d'alarme de processus si la modification de la valeur de comptage n'a pas été provoquée par une impulsion de comptage pour un codeur incrémental ou un générateur d'impulsions
6
* Au bit d'information en retour STS_DIR est préaffectée la valeur "0". Lorsque la première modification de la valeur de comptage ou de la valeur de position s'effectue dans le sens de décomptage directement après la mise en route du module technologique, aucune alarme de processus ne se déclenche.
Par défaut Par défaut, les alarmes de processus ne sont pas validées.

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 117
4.2 Paramétrer le module
4.2.1 Possibilités du paramétrage
Mode de fonctionnement Comptage — Possibilités du paramétrage Pour les fonctions de comptage, deux possibilités s'offrent à vous pour le paramétrage et la commande des fonctions du module technologique :
● Configuration d'un objet technologique High_Speed_Counter et commande via l'instruction High_Speed_Counter correspondante
Remarque
Configuration par objet technologique
Nous recommandons la configuration conviviale et graphique via l'objet technologique High_Speed_Counter. Vous trouverez la description détaillée de cette configuration au paragraphe Objet technologique High_Speed_Counter (Page 69).
Au début du paramétrage de l'objet technologique (Page 75), associez le module technologique configuré et la voie de comptage à l'objet technologique.
● Paramétrage via HW Config (Page 119) et commande via l'interface de commande et de compte rendu du module technologique
Remarque
Paramétrage via HW Config
Pour plus d'aide sur le paramétrage via HWCN , référez-vous à l'aide contextuelle des paramètres dans STEP 7 (TIA-Portal). L'interface de commande et de compte rendu est décrite aux paragraphes suivants :
Affectation de l'interface de commande (Page 147)
Affectation de l'interface de compte-rendu (Page 150)

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position 118 Description fonctionnelle, 02/2014, A5E32010205-AB
Mode de fonctionnement Mesure Pour le mode de fonctionnement Mesure, aucun objet technologique n'est disponible. Le paramétrage (Page 119) du mode de fonctionnement "Mesure" s'effectue via le paramétrage (HW Config) (Page 119) du module technologique.
La commande du module technologique se fait par l'accès direct à l'interface de commande et de compte rendu.
Détection de position avec codeur absolu SSI Aucun objet technologique n'est disponible pour la détection de position avec codeur absolu SSI.
● En mode de fonctionnement "Mode manuel", effectuez le paramétrage (Page 129) du codeur absolu SSI et des entrées et sorties TOR via le paramétrage (HW Config) (Page 119) du module technologique.
● En mode de fonctionnement "Détection de position pour Motion Control", effectuez le paramétrage du codeur absolu SSI via les paramètres de module (Page 112) lors de la configuration du module technologique.
Les retours d'informations du module technologique s'effectuent via l'interface de compte rendu.

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 119
4.2.2 Ouvrir le paramétrage (HW Config)
Ouverture par navigation de projet Procédez comme suit :
1. Ouvrez le dossier "Modules locaux" ou "Périphérie décentralisée" dans la navigation de projet.
2. Dans la navigation de projet, ouvrez le module technologique.
3. Double-cliquez sur l'objet "Paramètres".
Ouverture par vue de l'appareil Procédez comme suit :
1. Ouvrez la Configuration de l'appareil de la CPU ou de l'IM.
2. Sélectionnez la Vue de l'appareil.
3. Cliquez avec le bouton droit de la souris sur le module technologique et sélectionnez "Paramètres".
4.2.3 Mode de fonctionnement Mesure
4.2.3.1 Vue d'ensemble En mode de fonctionnement "Mesure", vous effectuez les paramétrages suivants :
● Entrées de comptage
– Spécifier les signaux d'entrée/le type de codeur (Page 120)
– Autres paramètres (Page 121)
● Spécifier la valeur de mesure (Page 89)
● Comportement d'une entrée TOR (DI)
– Fonction d'une entrée TOR (DI) (Page 124)
– Options des fonctions (Page 126)
● Comportement d'une sortie TOR (DQ)
– Fonction d'une sortie TOR (DQ) (Page 127)
● Réaction du compteur (Page 81)

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position 120 Description fonctionnelle, 02/2014, A5E32010205-AB
4.2.3.2 Entrées de comptage : Spécifier les signaux d'entrée/le type de codeur (mode de fonctionnement "Mesure")
Type de signal Vous avez le choix entre les types de signaux suivants :
Type de signal Signification Codeur incrémental (A, B décalage de phase)
Un codeur incrémental avec les signaux déphasés A et B est raccordé.
Codeur incrémental (A, B, N) Un codeur incrémental avec les signaux déphasés A et B et un signal de zéro N est raccordé.
Impulsion (A) et sens (B) Un générateur d'impulsions (signal A) avec signal de sens (signal B) est raccordé.
Impulsion (A) Un générateur d'impulsions (signal A) sans signal de sens est raccordé. Vous pouvez spécifier le sens de comptage via l'interface de commande (Page 147).
Comptage (A), décomptage (B)
Des signaux pour le comptage (signal A) et pour le décomptage (signal B) sont raccordés.
Codeur absolu (SSI) Un codeur absolu SSI est raccordé (uniquement en cas d'utilisation de TM PosInput) : voir Paramétrer la détection de position avec codeur absolu SSI (Page 129)
Inverser le sens Vous pouvez inverser le sens de comptage ou les valeurs de position pour les adapter au processus.
L'inversion est paramétrable et opérante pour les types de signaux suivants :
● Codeur incrémental (A, B décalage de phase)
● Codeur incrémental (A, B, N)
● Codeur absolu (SSI)

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 121
4.2.3.3 Entrées de comptage : Autres paramètres (mode de fonctionnement "Mesure")
Evaluation du signal En paramétrant l'évaluation du signal (Page 65), vous déterminez quels fronts des signaux sont comptés.
Vous avez le choix entre les options suivantes :
Evaluation du signal Signification Simple (option par défaut)
Les fronts du signal A sont évalués pendant un niveau bas du signal B.
Double Chaque front du signal A est évalué. Quadruple Chaque front des signaux A et B est évalué.
Le paramètre est paramétrable pour les types de signaux suivants :
● Codeur incrémental (A, B décalage de phase)
● Codeur incrémental (A, B, N)
Fréquence de filtre En paramétrant la fréquence de filtre, vous supprimez les perturbations aux entrées de comptage A, B et N.
La fréquence de filtre sélectionnée se réfère à un rapport impulsion/pause compris entre 40:60 et 60:40. Il en résulte ainsi une certaine durée minimale d'impulsion/de pause. Les transitions dont la durée est inférieure à la durée minimale d'impulsion/de pause sont inhibées.
Vous avez le choix entre les fréquences de filtre suivantes :
Tableau 4- 2 Fréquence de filtre et durée minimale d'impulsion/de pause respective
Fréquence de filtre Durée minimale d'impulsion/de pause 100 Hz 4,0 ms 200 Hz 2,0 ms 500 Hz 800 µs 1 kHz 400 µs 2 kHz 200 µs 5 kHz 80 µs 10 kHz 40 µs 20 kHz 20 µs 50 kHz 8,0 µs 100 kHz 4,0 µs 200 kHz (option par défaut de TM Count) 2,0 µs 500 kHz* 0,8 µs 1 MHz* (option par défaut pour TM PosInput) 0,4 µs * Uniquement pour TM PosInput

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position 122 Description fonctionnelle, 02/2014, A5E32010205-AB
Type de capteur En paramétrant le type de capteur, vous déterminez comment les entrées de comptage sont commutées pour le TM Count. Vous avez le choix entre les options suivantes : Type de capteur Signification Commutateur P (option par défaut)
Le codeur ou le capteur commute les entrées A, B et N actives sur 24VDC.
Commutateur M Le codeur ou le capteur commute les entrées A, B et N actives sur M.
Push-pull (commutateurs M et P) Le codeur ou le capteur commute les entrées A, B et N alternativement actives sur M et 24VDC.
Pour les codeurs incrémentaux, on sélectionne habituellement "Push-pull". Dans le cas d'une utilisation de capteurs à 2 fils, par ex. des barrières photoélectriques ou des détecteurs de proximité, le câblage "Commutateur P" ou "Commutateur M" doit être choisi en conséquence. Vous pouvez savoir si votre codeur incrémental est de type push-pull en consultant la fiche technique du codeur.
Remarque
Si vous utilisez un codeur incrémental de type push-pull, vous pouvez surveiller les signaux de codeur pour détecter une rupture de fil.
Réaction en cas de signal N Avec ce paramètre, vous déterminez la réaction qui sera déclenchée par le signal N. Vous avez le choix entre les options suivantes : Option Signification Pas de réaction en cas de signal N (option par défaut)
Le compteur n'est pas influencé par le signal N.
Synchronisation en cas de signal N (Page 32)
Le compteur est mis à la valeur initiale en cas de signal N. Si vous sélectionnez la fonction "Validation de synchronisation en cas de signal N" pour une entrée TOR, la synchronisation dépendra du niveau à l'entrée TOR.
Remarque
Vous ne pouvez choisir la réaction en cas de signal N que si vous avez sélectionné le type de signal (Page 120) "Codeur incrémental (A, B, N)".
Remarque
Si vous sélectionnez " Synchronisation en cas de signal N", vous pourrez sélectionner, pour une entrée TOR (Page 124), la fonction "Validation de synchronisation en cas de signal N".

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 123
Fréquence Avec ce paramètre, déterminez la fréquence des événements suivants :
● Synchronisation en cas de signal N
● Synchronisation comme fonction d'une entrée TOR
Vous avez le choix entre les options suivantes :
Option Signification Monocoup (option par défaut)
Le compteur n'est positionné qu'au premier signal N ou qu'au premier front paramétré de l'entrée TOR.
Périodique Le compteur est positionné à chaque signal N ou à chaque front paramétré de l'entrée TOR.

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position 124 Description fonctionnelle, 02/2014, A5E32010205-AB
4.2.3.4 Comportement d'une entrée TOR (DI) : Fonction d'une entrée TOR (DI) (mode de fonctionnement "Mesure")
Régler la fonction de l'entrée TOR (DI) En paramétrant une entrée TOR, vous déterminez quelle fonction son changement d'état logique va déclencher.
Vous avez le choix entre les options suivantes :
Fonction d'une entrée TOR Signification Début/fin de validation (commandé par niveau) Le niveau de l'entrée TOR respective met à 1
et 0 la validation matérielle (Page 20). Début de validation (commandé par front) Le front paramétré à l'entrée TOR respective met
à 1 la validation matérielle (Page 20). Fin de validation (commandée par front) Le front paramétré à l'entrée TOR respective met
à 0 la validation matérielle (Page 20). Synchronisation (Page 27) Le front paramétré à l'entrée TOR respective met
le compteur à la valeur initiale. Validation de synchronisation en cas de signal N Le niveau actif à l'entrée TOR respective active la
synchronisation du compteur en cas de signal N (Page 32).
Entrée TOR sans fonction Aucune fonction n'est associée à l'entrée TOR respective. La CPU peut lire l'état logique de l'entrée TOR via l'interface de compte rendu (Page 150).
Remarque
Chaque fonction, sauf "Entrée TOR sans fonction", peut être utilisée uniquement une fois et ne peut plus être sélectionnée par les autres entrées TOR.
Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 125
Temps de filtre En paramétrant le temps de filtre, vous supprimez les perturbations aux entrées TOR. Les signaux dont la durée d'impulsion est inférieure au temps de filtre paramétré ne sont pas pris en compte.
Vous avez le choix entre les temps de filtre suivants :
● Aucun
● 0,05 ms
● 0,1 ms(option par défaut)
● 0,4 ms
● 0,8 ms
● 1,6 ms
● 3,2 ms
● 12,8 ms
● 20 ms
Remarque
Si vous choisissez l'option "Aucun" ou "0,05 ms", vous devez utiliser des câbles blindés pour le raccordement des entrées TOR.
Remarque
Vous pouvez paramétrer simultanément le temps de filtre uniquement sous "Comportement DI0" pour toutes les entrées TOR.

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position 126 Description fonctionnelle, 02/2014, A5E32010205-AB
4.2.3.5 Comportement d'une entrée TOR (DI) : Options des fonctions (mode de fonctionnement "Mesure")
Certaines fonctions nécessitent d'autres paramètres avec lesquels vous pouvez spécifier plus précisément le comportement. Ils sont paramétrables pour la fonction respective.
Sélection du niveau Avec ce paramètre, vous déterminez pour quel niveau l'entrée TOR sera active.
Vous avez le choix entre les options suivantes :
Niveau Signification Actif si niveau High (option par défaut)
L'entrée TOR en question est active quand elle a la valeur 1.
Activé si niveau Low L'entrée TOR en question est active quand elle a la valeur 0.
Le paramètre est paramétrable pour les fonctions suivantes d'une entrée TOR :
● Début/fin de validation (commandé par niveau)
● Validation de synchronisation en cas de signal N
Sélection du front Avec ce paramètre, vous déterminez sur quel front d'une entrée TOR la fonction paramétrée est déclenchée.
Vous avez le choix entre les options suivantes :
● Si front montant (option par défaut)
● Si front descendant
Le paramètre est paramétrable pour les fonctions suivantes d'une entrée TOR :
● Début de validation (commandé par front)
● Fin de validation (commandée par front)
● Synchronisation
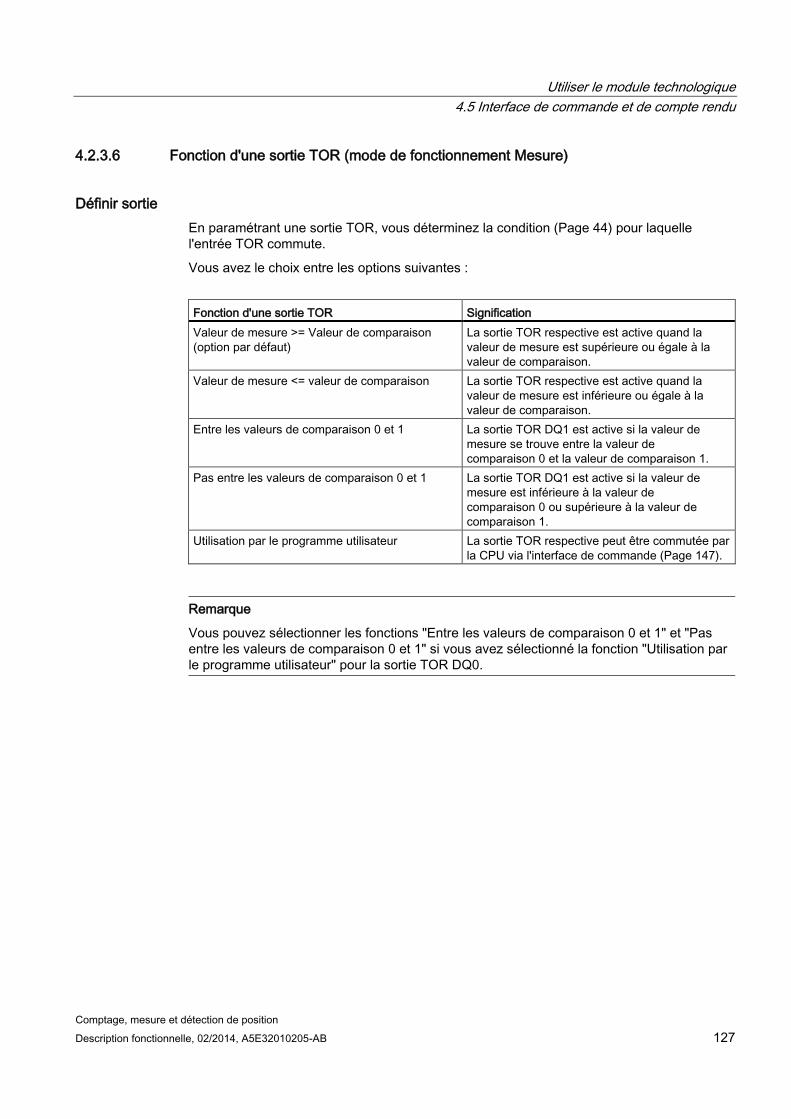
Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 127
4.2.3.6 Fonction d'une sortie TOR (mode de fonctionnement Mesure)
Définir sortie En paramétrant une sortie TOR, vous déterminez la condition (Page 44) pour laquelle l'entrée TOR commute.
Vous avez le choix entre les options suivantes :
Fonction d'une sortie TOR Signification Valeur de mesure >= Valeur de comparaison (option par défaut)
La sortie TOR respective est active quand la valeur de mesure est supérieure ou égale à la valeur de comparaison.
Valeur de mesure <= valeur de comparaison La sortie TOR respective est active quand la valeur de mesure est inférieure ou égale à la valeur de comparaison.
Entre les valeurs de comparaison 0 et 1 La sortie TOR DQ1 est active si la valeur de mesure se trouve entre la valeur de comparaison 0 et la valeur de comparaison 1.
Pas entre les valeurs de comparaison 0 et 1 La sortie TOR DQ1 est active si la valeur de mesure est inférieure à la valeur de comparaison 0 ou supérieure à la valeur de comparaison 1.
Utilisation par le programme utilisateur La sortie TOR respective peut être commutée par la CPU via l'interface de commande (Page 147).
Remarque
Vous pouvez sélectionner les fonctions "Entre les valeurs de comparaison 0 et 1" et "Pas entre les valeurs de comparaison 0 et 1" si vous avez sélectionné la fonction "Utilisation par le programme utilisateur" pour la sortie TOR DQ0.

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position 128 Description fonctionnelle, 02/2014, A5E32010205-AB
Valeur de comparaison 0 En paramétrant la valeur de comparaison (Page 51), vous déterminez pour quelle valeur de mesure la sortie TOR DQ0 commute en raison de l'événement de comparaison choisi.
Vous devez saisir une valeur inférieure à la valeur de comparaison 1. Vous pouvez saisir jusqu'à six décimales.
La valeur par défaut est "0.000000". L'unité de la valeur de comparaison dépend de la grandeur de mesure.
Valeur de comparaison 1 En paramétrant la valeur de comparaison (Page 51), vous déterminez pour quelle valeur de mesure la sortie TOR DQ1 commute en raison de l'événement de comparaison choisi.
Vous devez saisir une valeur supérieure à la valeur de comparaison 0. Vous pouvez saisir jusqu'à six décimales.
La valeur par défaut est "10.000000". L'unité de la valeur de comparaison dépend de la grandeur de mesure.

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 129
4.2.4 Paramétrer la détection de position avec codeur absolu SSI
4.2.4.1 Vue d'ensemble Lors de l'utilisation d'un codeur absolu SSI, vous effectuez les paramétrages suivants :
● Entrées de comptage
– Spécifier les signaux d'entrée/le type de codeur (Page 129)
– Autres paramètres (Page 130)
● Comportement d'une entrée TOR (DI)
– Fonction d'une DI en mode "Comptage" (Page 133)
– Fonction d'une DI en mode "Mesure" (Page 134)
– Options des fonctions (Page 135)
● Comportement d'une sortie TOR (DQ)
– Fonction d'une DQ en mode "Comptage" (Page 135)
– Fonction d'une DQ en mode "Mesure" (Page 137)
● Hystérésis (Page 137)
● Spécifier la valeur de mesure (Page 137)
Vous trouverez deux exemples de structure du télégramme SSI dans le module technologique à la rubrique Exemples de structure du télégramme (Page 139)
4.2.4.2 Entrées de comptage : Spécifier les signaux d'entrée/le type de codeur (SSI)
Type de signal Si un codeur absolu SSI (Page 17) est raccordé, sélectionnez le type de signal "Codeur absolu (SSI)".
Inverser le sens Vous pouvez inverser les valeurs fournies par le codeur absolu SSI pour les adapter au processus.

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position 130 Description fonctionnelle, 02/2014, A5E32010205-AB
4.2.4.3 Entrées de comptage : Autres paramètres (SSI)
Longueur du télégramme En paramétrant la longueur de télégramme, définissez le nombre de bits d'un télégramme SSI. Vous trouverez la longueur du télégramme de votre codeur absolu SSI dans la fiche technique du codeur. Un bit de parité existant ne compte pas dans la longueur de télégramme.
Une longueur de télégramme de 10 bits à 40 bits est admissible. La valeur par défaut est "13 Bit".
Type de code En paramétrant le type de code, vous déterminez si le codeur fournit un code binaire ou un code de Gray.
Vous avez le choix entre les options suivantes :
Type de code Signification Gray (option par défaut)
La valeur de position fournie en code de Gray par le codeur absolu SSI est convertie en code binaire.
Dual La valeur fournie par le codeur absolu SSI n'est pas convertie.
Vitesse de transmission En paramétrant la vitesse de transmission, vous déterminez la vitesse de transmission des données du codeur absolu SSI au module technologique. Vous avez le choix entre plusieurs options parmi 125 kHz et 2 MHz. La valeur par défaut est "125 kHz".
La vitesse de transmission maximale dépend de la longueur de ligne et des caractéristiques techniques du codeur absolu SSI. Pour plus d'informations, référez-vous à la description du capteur.

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 131
Période de la bascule monostable En paramétrant la période de la bascule monostable, vous déterminez le temps de pause entre deux télégrammes SSI.
La période de la bascule monostable paramétrée doit être supérieure à celle du codeur absolu SSI utilisé. Vous trouverez cette valeur dans les caractéristiques techniques du codeur absolu SSI.
Vous avez le choix entre les options suivantes :
● Automatique (par défaut)
● 16 µs
● 32 µs
● 48 µs
● 64 µs
Remarque
Si vous utilisez la fonction système "Synchronisme d'horloge", l'option "Automatique" correspond à une Période de la bascule monostable de 64 µs.
Parité En paramétrant la parité, vous déterminez si le codeur absolu SSI transmet un bit de parité.
Ainsi, quand un codeur à 25 bits est paramétré avec parité, le module technologique lit 26 bits. C'est le bit suivant le bit de poids faible (LSB) dans le télégramme SSI qui est évalué comme bit de parité. Une erreur de parité est signalée dans l'interface de compte rendu (Page 150) par le bit ENC_ERROR.
Numéro de bit du LSB de la valeur de position Avec ce paramètre, déterminez le numéro de bit du LSB (bit de poids faible) de la valeur de position dans le télégramme du codeur absolu SSI. Vous limitez ainsi la résolution du codeur absolu SSI. La valeur doit être inférieure au numéro de bit du MSB de la valeur de position. La différence entre les numéros de bit du MSB et du LSB de la valeur de position doit être inférieure à 31.
La valeur par défaut est "0".

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position 132 Description fonctionnelle, 02/2014, A5E32010205-AB
Numéro de bit du MSB de la valeur de position Avec ce paramètre, déterminez le numéro de bit du MSB (bit de poids fort) de la valeur de position dans le télégramme du codeur absolu SSI. Vous limitez ainsi la résolution du codeur absolu SSI. La valeur doit être inférieure à la longueur du télégramme et supérieure au numéro de bit du LSB de la valeur de position. La différence entre les numéros de bit du MSB et du LSB de la valeur de position doit être inférieure à 31.
La valeur par défaut est "12".
Remarque
Si vous avez choisi comme type de code "Gray", seule la plage du LSB au MSB de la valeur de position est convertie en code binaire.

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 133
4.2.4.4 Comportement d'une entrée TOR (DI) : Fonction d'une entrée TOR (DI) (SSI, mode de fonctionnement "Comptage")
Régler la fonction de l'entrée TOR (DI) En paramétrant une entrée TOR, vous déterminez quelle fonction son changement d'état logique va déclencher.
Vous avez le choix entre les options suivantes :
Fonction d'une entrée TOR Signification Capture (Page 25) Le front paramétré à l'entrée TOR respective mémorise la valeur
actuelle de position comme valeur de Capture. La fonction peut uniquement être utilisée pour une entrée TOR.
Entrée TOR sans fonction Aucune fonction n'est associée à l'entrée TOR respective. La CPU peut lire l'état logique de l'entrée TOR via l'interface de compte rendu (Page 150).
Temps de filtre En paramétrant le temps de filtre, vous supprimez les perturbations aux entrées TOR. Les signaux dont la durée d'impulsion est inférieure au temps de filtre paramétré ne sont pas pris en compte.
Vous avez le choix entre les temps de filtre suivants :
● Aucun
● 0,05 ms
● 0,1 ms(option par défaut)
● 0,4 ms
● 0,8 ms
● 1,6 ms
● 3,2 ms
● 12,8 ms
● 20 ms
Remarque
Si vous choisissez l'option "Aucun" ou "0,05 ms", vous devez utiliser des câbles blindés pour le raccordement des entrées TOR.
Remarque
Vous pouvez paramétrer simultanément le temps de filtre uniquement sous "Comportement DI0" pour toutes les entrées TOR.

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position 134 Description fonctionnelle, 02/2014, A5E32010205-AB
4.2.4.5 Comportement d'une entrée TOR (DI) : Fonction d'une entrée TOR (DI) (SSI, mode de fonctionnement "Mesure")
Régler la fonction de l'entrée TOR (DI) "Entrée TOR sans fonction" est associé à l'entrée TOR respective. La CPU peut lire l'état logique de l'entrée TOR via l'interface de compte rendu (Page 150).
Temps de filtre En paramétrant le temps de filtre, vous supprimez les perturbations aux entrées TOR. Les signaux dont la durée d'impulsion est inférieure au temps de filtre paramétré ne sont pas pris en compte.
Vous avez le choix entre les temps de filtre suivants :
● Aucun
● 0,05 ms
● 0,1 ms (option par défaut)
● 0,4 ms
● 0,8 ms
● 1,6 ms
● 3,2 ms
● 12,8 ms
● 20 ms
Remarque
Si vous choisissez l'option "Aucun" ou "0,05 ms", vous devez utiliser des câbles blindés pour le raccordement des entrées TOR.
Remarque
Vous pouvez paramétrer le temps de filtre simultanément pour toutes les entrées TOR uniquement sous "Comportement DI0".
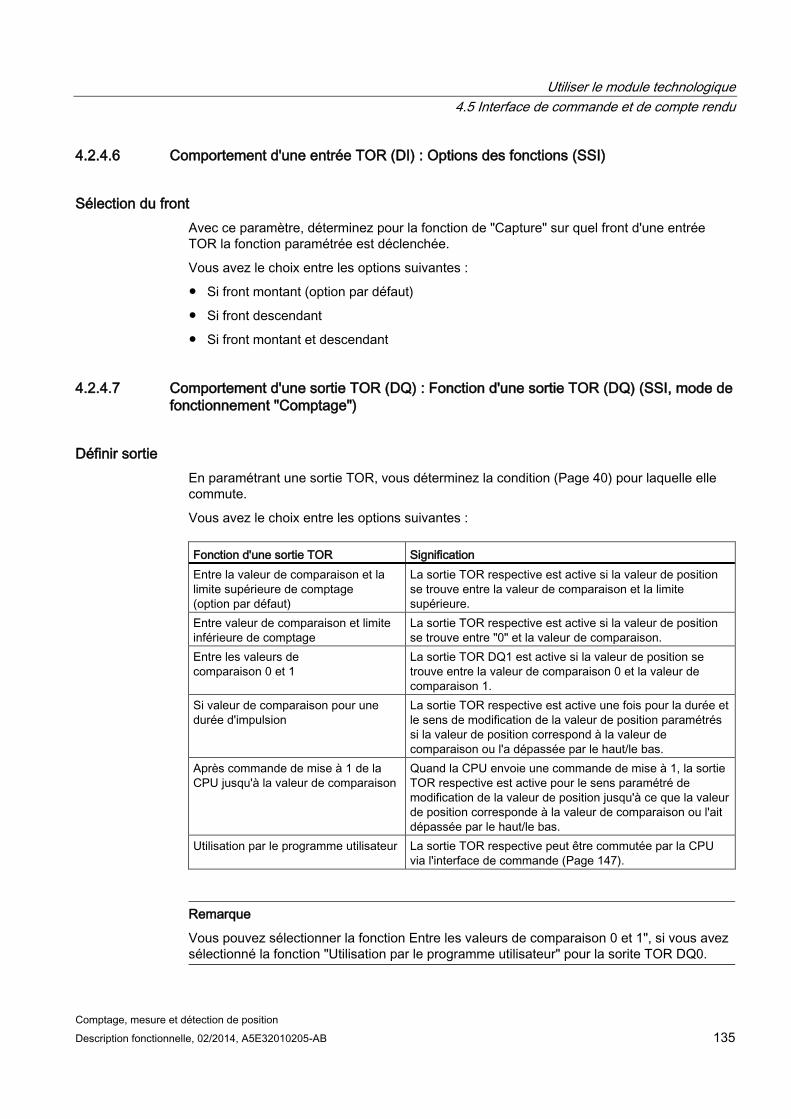
Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 135
4.2.4.6 Comportement d'une entrée TOR (DI) : Options des fonctions (SSI)
Sélection du front Avec ce paramètre, déterminez pour la fonction de "Capture" sur quel front d'une entrée TOR la fonction paramétrée est déclenchée.
Vous avez le choix entre les options suivantes :
● Si front montant (option par défaut)
● Si front descendant
● Si front montant et descendant
4.2.4.7 Comportement d'une sortie TOR (DQ) : Fonction d'une sortie TOR (DQ) (SSI, mode de fonctionnement "Comptage")
Définir sortie En paramétrant une sortie TOR, vous déterminez la condition (Page 40) pour laquelle elle commute.
Vous avez le choix entre les options suivantes : Fonction d'une sortie TOR Signification Entre la valeur de comparaison et la limite supérieure de comptage (option par défaut)
La sortie TOR respective est active si la valeur de position se trouve entre la valeur de comparaison et la limite supérieure.
Entre valeur de comparaison et limite inférieure de comptage
La sortie TOR respective est active si la valeur de position se trouve entre "0" et la valeur de comparaison.
Entre les valeurs de comparaison 0 et 1
La sortie TOR DQ1 est active si la valeur de position se trouve entre la valeur de comparaison 0 et la valeur de comparaison 1.
Si valeur de comparaison pour une durée d'impulsion
La sortie TOR respective est active une fois pour la durée et le sens de modification de la valeur de position paramétrés si la valeur de position correspond à la valeur de comparaison ou l'a dépassée par le haut/le bas.
Après commande de mise à 1 de la CPU jusqu'à la valeur de comparaison
Quand la CPU envoie une commande de mise à 1, la sortie TOR respective est active pour le sens paramétré de modification de la valeur de position jusqu'à ce que la valeur de position corresponde à la valeur de comparaison ou l'ait dépassée par le haut/le bas.
Utilisation par le programme utilisateur La sortie TOR respective peut être commutée par la CPU via l'interface de commande (Page 147).
Remarque
Vous pouvez sélectionner la fonction Entre les valeurs de comparaison 0 et 1", si vous avez sélectionné la fonction "Utilisation par le programme utilisateur" pour la sorite TOR DQ0.

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position 136 Description fonctionnelle, 02/2014, A5E32010205-AB
Valeur de comparaison 0 En paramétrant la valeur de comparaison, vous déterminez à quelle valeur de position la sortie TOR DQ0 commute en raison de l'événement de comparaison choisi.
Vous devez saisir une valeur inférieure à la valeur de comparaison 1.
La valeur par défaut est "0".
Valeur de comparaison 1 En paramétrant la valeur de comparaison, vous déterminez à quelle valeur de position la sortie TOR DQ1 commute en raison de l'événement de comparaison choisi.
Vous devez saisir une valeur supérieure à la valeur de comparaison 0.
La valeur par défaut est "10".
Sens de comptage Ce paramètre vous permet de déterminer pour quel sens de modification de la valeur de position la fonction choisie s'applique.
Vous avez le choix entre les options suivantes :
Sens de modification de la valeur de position Signification Dans les deux sens (option par défaut)
La sortie TOR respective est comparée et commutée indépendamment du fait que la valeur de position diminue ou augmente.
Comptage La sortie TOR respective n'est comparée et commutée que si la valeur de position augmente.
Décomptage La sortie TOR respective n'est comparée et commutée que si la valeur de position diminue.
Le paramètre est paramétrable pour les fonctions suivantes :
● Si valeur de comparaison pour une durée d'impulsion
● Après commande de mise à 1 de la CPU jusqu'à la valeur de comparaison
Durée d'impulsion En paramétrant la durée d'impulsion pour la fonction "Si valeur de comparaison pour une durée d'impulsion", vous déterminez pendant combien de millisecondes la sortie TOR respective est activée.
Une valeur comprise entre 0,5 et 6553,5 s est admissible.
Le réglage par défaut est "500,0" et correspond à une durée d'impulsion de 0,5 s.

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 137
4.2.4.8 Comportement d'une sortie TOR (DQ) : Fonction d'une sortie TOR (DQ) (SSI, mode de fonctionnement "Mesure")
En mode de fonctionnement Mesure, définissez les paramètres décrits au paragraphe Fonction d'une sortie TOR (mode de fonctionnement Mesure) (Page 127) pour les sorties TOR de la voie.
4.2.4.9 Hystérésis (SSI)
Régler la zone d'hystérésis En paramétrant l'hystérésis (Page 56), définissez une plage autour des valeurs de comparaison. Dans la zone d'hystérésis, les sorties TOR ne peuvent pas être à nouveau commutées avant que la valeur de position n'ait quitté cette zone une fois.
Si vous saisissez "0", l'hystérésis sera désactivée. Une valeur comprise entre 0 et 255 est admissible. La valeur par défaut est "0".
Vous pouvez paramétrer l'hystérésis uniquement en mode de fonctionnement Comptage.
4.2.4.10 Spécifier la valeur de mesure (SSI)
Grandeur de mesure Ce paramètre vous permet de définir quelle grandeur de mesure (Page 52) le module technologique doit mettre à disposition.
Vous avez le choix entre les options suivantes :
Grandeur de mesure Signification Fréquence (option par défaut)
La grandeur de mesure est une fréquence. L'unité est le hertz (Hz). Les modifications incrémentales de la valeur de position sont mesurées.
Durée de période La grandeur de mesure est une période qui correspond à l'inverse de la fréquence. L'unité est la seconde (s).
Vitesse La grandeur de mesure est une vitesse. Paramétrez séparément la base de temps pour la mesure de la vitesse et les incréments par unité.
Télégramme SSI complet Les premiers 32 bits du télégramme SSI sont retournés au lieu d'une grandeur de mesure. Ce faisant, des bits supplémentaires, qui n'appartiennent pas à l'information de position réelle, sont fournis. Une inversion de sens paramétrée n'est pas prise en compte.
Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position 138 Description fonctionnelle, 02/2014, A5E32010205-AB
Temps d'actualisation Avec le paramétrage du temps d'actualisation (Page 51) en millisecondes, définissez l'intervalle de temps entre deux actualisations de la valeur de mesure.
Le temps d'actualisation influe sur la précision de la mesure.
Si vous entrez "0", la valeur de mesure est actualisée à chaque cycle. Vous pouvez saisir jusqu'à trois décimales. Une valeur comprise entre 0,000 et 25000,000 est admissible. La valeur par défaut est "10,000".
Base de temps pour la mesure de la vitesse Avec ce paramètre, déterminez la base de temps avec laquelle la vitesse doit être mise à disposition.
Vous avez le choix entre les options suivantes :
● 1 ms
● 10 ms
● 100 ms
● 1 s
● 60 s/1 min
La valeur par défaut est "60 s/1 min".
Incréments par unité Avec ce paramètre, vous définissez le nombre d'incréments que le codeur absolu SSI fournit par tour.
Une valeur comprise entre 1 et 65535 est admissible.
Exemple :
Votre codeur fonctionne avec une résolution de 12 bits par tour et fournit 4096 incréments par tour. La vitesse doit être mesurée en tours par minute (tr/min).
Dans ce cas, vous devez paramétrer les points suivants :
● Incréments par unité : 4096
● Base de temps pour la mesure de vitesse : 60 s/1 min

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 139
4.2.4.11 Exemples de structure du télégramme
Exemple 1 Dans cet exemple, le codeur absolu SSI a la spécification suivante :
● Le télégramme SSI a une longueur de 25 bits.
● Le MSB de la valeur de position est le bit 24.
● Le LSB de la valeur de position est le bit 0.
● La valeur de position présente un codage de Gray.
● Il n'y a pas de bit de parité.
La structure du télégramme est la suivante :
MG Bit Multiturn en code de Gray SG Bit Singleturn en code de Gray
Télégramme SSI complet
Si au lieu d'une grandeur de mesure, vous souhaitez recevoir le télégramme SSI non traité, ce dernier est fourni en retour dans l'interface de compte rendu et aligné à droite :
MG Bit Multiturn en code de Gray SG Bit Singleturn en code de Gray
Valeur de retour de la valeur de position
La valeur de position fournie en code de Gray est convertie en code binaire par le module technologique et fournie en retour dans l'interface de compte rendu, alignée à droite :
MD Bit Multiturn en code binaire (Dual Code) SD Bit Singleturn en code binaire (Dual Code)

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position 140 Description fonctionnelle, 02/2014, A5E32010205-AB
Exemple 2 Dans cet exemple, le codeur absolu SSI a la spécification suivante :
● Le télégramme SSI a une longueur de 34 bits.
● Le MSB de la valeur de position est le bit 33.
● Le LSB de la valeur de position est le bit 6.
● La valeur de position présente un codage de Gray.
● Le télégramme SSI a deux bits spéciaux.
● Il y a un bit de parité. Le bit de parité ne compte pas dans la longueur de télégramme.
La structure du télégramme est la suivante :
MG Bit Multiturn en code de Gray SG Bit Singleturn en code de Gray S1 Bit d'état 1 S2 Bit d'état 2 P Bit de parité
Télégramme SSI complet
Si au lieu d'une grandeur de mesure, vous souhaitez recevoir le télégramme SSI non traité, le module technologique lit au maximum les 32 bits de poids le plus faible du codeur. Le module technologique fournit le bit suivant le LSB comme bit de parité. C'est pour cette raison que, dans cet exemple, le module technologique lit les 31 bits de poids le plus faible du télégramme SSI.
La structure du télégramme SSI complet fourni en retour est la suivante :
MG Bit Multiturn en code de Gray SG Bit Singleturn en code de Gray
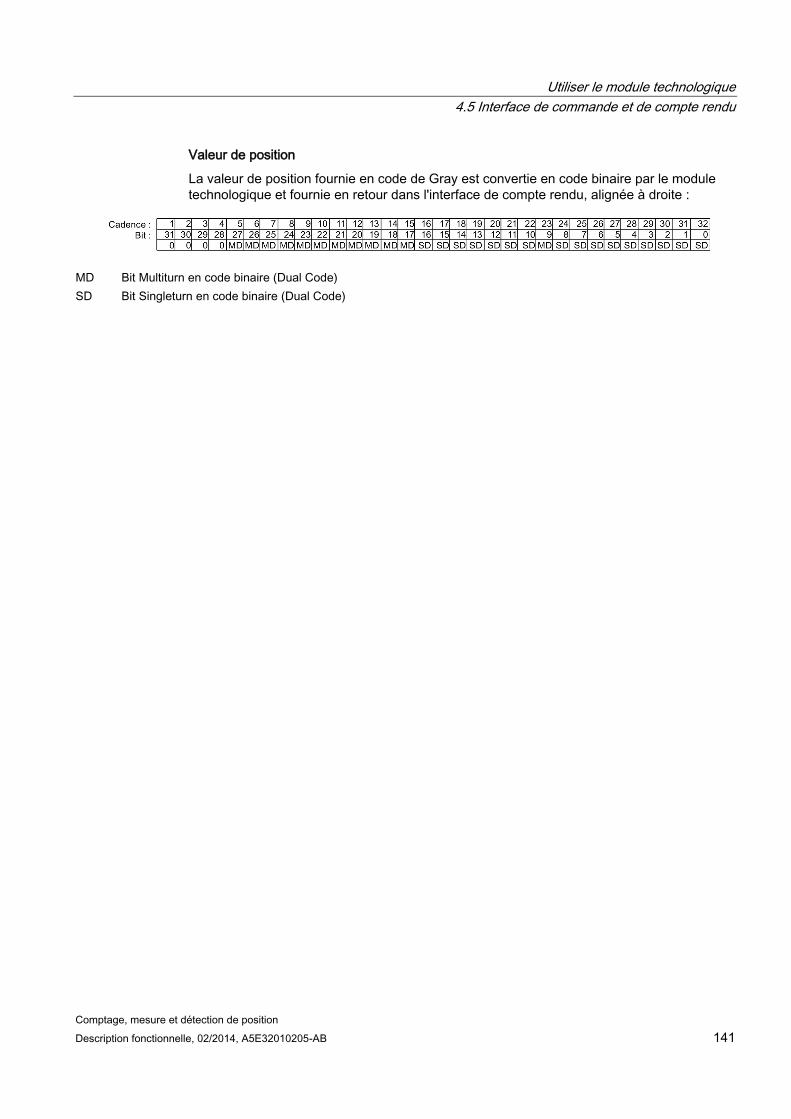
Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 141
Valeur de position
La valeur de position fournie en code de Gray est convertie en code binaire par le module technologique et fournie en retour dans l'interface de compte rendu, alignée à droite :
MD Bit Multiturn en code binaire (Dual Code) SD Bit Singleturn en code binaire (Dual Code)

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position 142 Description fonctionnelle, 02/2014, A5E32010205-AB
4.3 Module En ligne & Diagnostic
4.3.1 Affichage et exploitation de diagnostic Vous pouvez diagnostiquer le matériel via la vue en ligne et de diagnostic. De plus, vous pouvez
● obtenir des informations sur le module technologique (par ex. la version du Firmware et le numéro de série)
● En cas de besoin, effectuer une mise à jour du système d'exploitation
Marche à suivre Pour ouvrir l'éditeur d'affichage pour les fonctions de diagnostic, procédez de la manière suivante :
1. Ouvrez le dossier "Modules locaux" ou "Périphérie décentralisée" dans la navigation de projet.
2. Dans la navigation de projet, ouvrez le module technologique.
3. Double-cliquez sur l'objet "En ligne & Diagnostic".
4. Cliquez sur l'affichage souhaité dans le navigateur de diagnostic.
Pour plus d'informations Pour plus d'informations sur les messages de diagnostic et les possibles mesures correctives, référez-vous au manuel du module technologique.
Remarque Détection de position pour Motion Control
En mode de fonctionnement "Détection de position pour Motion Control", le diagnostic de voie n'est pas disponible pour le module technologique.

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 143
4.4 Mise en service du module L'éditeur de mise en service vous aidera à mettre le module technologique en service et à tester ses fonctions.
Vous pouvez simuler des signaux de comptage sans câblage du processus et la commande des états des entrées TOR. Vous pouvez ainsi observer et contrôler le comportement de votre programme utilisateur lors d'un comptage.
Remarque
Le déclenchement des fonctions paramétrées des sorties TOR et des alarmes de processus paramétrées dépend de la valeur de comptage simulée.
Remarque
En mode de fonctionnement "Détection de position pour Motion Control", l'éditeur de mise en service n'est pas utilisé.
Voir aussi Affectation de l'interface de compte-rendu (Page 150)
4.4.1 Observer les valeurs de comptage, de mesure, les entrées (DI) et sorties TOR (DQ)
Conditions ● Il existe une connexion en ligne entre STEP 7 (TIA-Portal) et la CPU.
● La CPU est à l'état de fonctionnement RUN.
Marche à suivre Pour ouvrir l'éditeur de mise en service d'un module technologique, procédez de la manière suivante :
1. Ouvrez le dossier "Modules locaux" ou "Périphérie décentralisée" dans la navigation de projet.
2. Dans la navigation de projet, ouvrez le module technologique.
3. Double-cliquez sur l'objet "Mise en service".
L'éditeur de mise en service commute automatiquement en mode en ligne. La Task Card "Tester" affiche à droite le panneau de commande de la CPU, qui sert à commander son état de fonctionnement.

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position 144 Description fonctionnelle, 02/2014, A5E32010205-AB
Visualiser les valeurs Les valeurs suivantes sont lues cycliquement par le module technologique et affichées sous "Visualiser les valeurs" :
● Valeur de comptage
● Valeur de mesure
● Valeur de Capture
● Code d'erreur
Les valeurs suivantes sont lues une fois par le module technologique et affichées sous "Visualiser les valeurs" :
● Valeur de comparaison 0
● Valeur de comparaison 1
● Limite supérieure de comptage
● Limite inférieure de comptage
● Valeur initiale
Dans la colonne "Format d'affichage", vous pouvez choisir entre décimal et hexadécimal pour le format des valeurs affichées. Pour la valeur de mesure, le format d'affichage "Nombre à virgule flottante" s'applique également.
Visualiser drapeaux d'état Les informations d'état du module technologique sont lues et affichées en ligne. Quand la CPU est en STOP, l'affichage d'état n'est pas mis à jour.
Visualiser DI & DQ Les états logiques des entrées et sorties TOR du module technologique sont affichés sous "Visualiser/Commander DI & DQ". La colonne "Commentaire" affiche la fonction actuelle paramétrée. Avec le tableau de commande au-dessus de la table, vous pouvez modifier les valeurs manuellement et simuler ainsi les fonctions de comptage et de mesure : voir Commande manuelle des valeurs de comptage, entrées TOR et sorties TOR (Page 145)
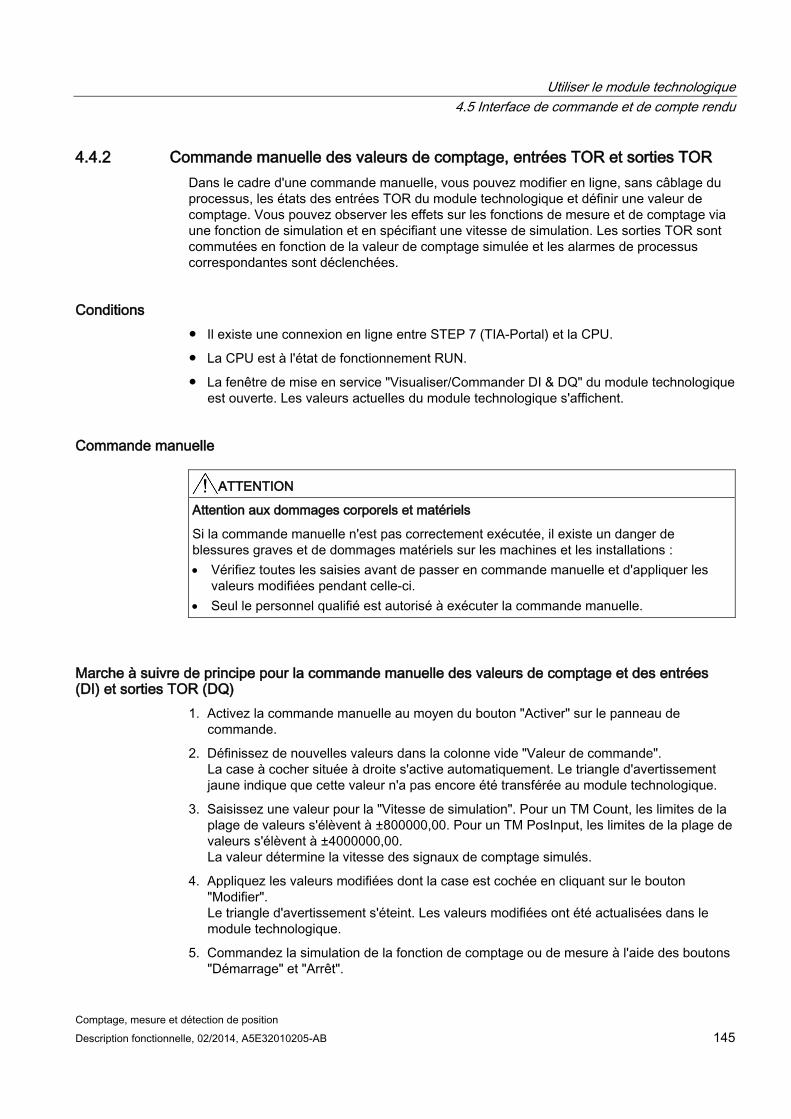
Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 145
4.4.2 Commande manuelle des valeurs de comptage, entrées TOR et sorties TOR Dans le cadre d'une commande manuelle, vous pouvez modifier en ligne, sans câblage du processus, les états des entrées TOR du module technologique et définir une valeur de comptage. Vous pouvez observer les effets sur les fonctions de mesure et de comptage via une fonction de simulation et en spécifiant une vitesse de simulation. Les sorties TOR sont commutées en fonction de la valeur de comptage simulée et les alarmes de processus correspondantes sont déclenchées.
Conditions ● Il existe une connexion en ligne entre STEP 7 (TIA-Portal) et la CPU.
● La CPU est à l'état de fonctionnement RUN.
● La fenêtre de mise en service "Visualiser/Commander DI & DQ" du module technologique est ouverte. Les valeurs actuelles du module technologique s'affichent.
Commande manuelle
ATTENTION
Attention aux dommages corporels et matériels
Si la commande manuelle n'est pas correctement exécutée, il existe un danger de blessures graves et de dommages matériels sur les machines et les installations : • Vérifiez toutes les saisies avant de passer en commande manuelle et d'appliquer les
valeurs modifiées pendant celle-ci. • Seul le personnel qualifié est autorisé à exécuter la commande manuelle.
Marche à suivre de principe pour la commande manuelle des valeurs de comptage et des entrées (DI) et sorties TOR (DQ)
1. Activez la commande manuelle au moyen du bouton "Activer" sur le panneau de commande.
2. Définissez de nouvelles valeurs dans la colonne vide "Valeur de commande". La case à cocher située à droite s'active automatiquement. Le triangle d'avertissement jaune indique que cette valeur n'a pas encore été transférée au module technologique.
3. Saisissez une valeur pour la "Vitesse de simulation". Pour un TM Count, les limites de la plage de valeurs s'élèvent à ±800000,00. Pour un TM PosInput, les limites de la plage de valeurs s'élèvent à ±4000000,00. La valeur détermine la vitesse des signaux de comptage simulés.
4. Appliquez les valeurs modifiées dont la case est cochée en cliquant sur le bouton "Modifier". Le triangle d'avertissement s'éteint. Les valeurs modifiées ont été actualisées dans le module technologique.
5. Commandez la simulation de la fonction de comptage ou de mesure à l'aide des boutons "Démarrage" et "Arrêt".

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position 146 Description fonctionnelle, 02/2014, A5E32010205-AB
6. Observez les affichages sous "Visualiser les valeurs", "Visualiser les drapeaux d'état" et "Visualiser/Commander DI & DQ" et contrôlez les réactions de votre programme utilisateur.
7. Adaptez au besoin les valeurs dans la colonne "Valeur de forçage" en répétant les étapes 2 à 4.

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 147
4.5 Interface de commande et de compte rendu Vous trouverez des informations sur l'utilisation de l'interface de commande et de compte rendu sous Vue d'ensemble des utilisations possibles.
4.5.1 Affectation de l'interface de commande Le programme utilisateur influence la réaction du module technologique au moyen de l'interface de commande.
Interface de commande par voie Le tableau ci-dessous montre l’affectation de l'interface de commande :
Décalage de l'adresse de début
Paramètre Signification
Octets 0 … 3 Slot 0 Valeur de chargement (la signification de la valeur est indiquée dans LD_SLOT_0)
Octets 4 … 7 Slot 1 Valeur de chargement (la signification de la valeur est indiquée dans LD_SLOT_1)
Octet 8 LD_SLOT_0* Spécifie la signification de la valeur dans Slot 0 Bit 3 Bit 2 Bit 1 Bit 0 0 0 0 0 Pas d'action, état de repos 0 0 0 1 Charger la valeur de comptage (pour codeur
incrémental ou générateur d'impulsions) 0 0 1 0 Réservé 0 0 1 1 Charger la Valeur initiale (pour codeur
incrémental ou générateur d'impulsions) 0 1 0 0 Charger la valeur de comparaison 0 0 1 0 1 Charger la valeur de comparaison 1 0 1 1 0 Charger la Limite inférieure de comptage (pour
codeur incrémental ou générateur d'impulsions)
0 1 1 1 Charger la Limite supérieure de comptage (pour codeur incrémental ou générateur d'impulsions)
1 0 0 0 Réservé à 1 1 1 1

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position 148 Description fonctionnelle, 02/2014, A5E32010205-AB
Décalage de l'adresse de début
Paramètre Signification
Octet 8 LD_SLOT_1* Spécifie la signification de la valeur dans Slot 1 Bit 7 Bit 6 Bit 5 Bit 4 0 0 0 0 Pas d'action, état de repos 0 0 0 1 Charger la valeur de comptage (pour codeur
incrémental ou générateur d'impulsions) 0 0 1 0 Réservé 0 0 1 1 Charger la Valeur initiale (pour codeur
incrémental ou générateur d'impulsions) 0 1 0 0 Charger la valeur de comparaison 0 0 1 0 1 Charger la valeur de comparaison 1 0 1 1 0 Charger la Limite inférieure de comptage (pour
codeur incrémental ou générateur d'impulsions)
0 1 1 1 Charger la Limite supérieure de comptage (pour codeur incrémental ou générateur d'impulsions)
1 0 0 0 Réservé à 1 1 1 1
Octet 9 EN_CAPTURE Bit 7 : Validation fonction de Capture EN_SYNC_DN Bit 6 : Validation de la synchronisation dans le sens décomptage (pour codeur
incrémental ou générateur d'impulsions) EN_SYNC_UP Bit 5 : Validation de la synchronisation dans le sens comptage (pour codeur
incrémental ou générateur d'impulsions) SET_DQ1 Bit 4 : mise à 1 de DQ1 SET_DQ0 Bit 3 : mise à 1 de DQ0 TM_CTRL_DQ1 Bit 2 : Validation fonction technologique DQ1 TM_CTRL_DQ0 Bit 1 : Validation fonction technologique DQ0 SW_GATE Bit 0 : Validation logicielle (pour codeur incrémental ou générateur d'impulsions)
Octet 10 SET_DIR Bit 7 : Sens de comptage (pour signal de capteur ou de sens) – Bits 2 à 6 : réserve ; les bits doivent être mis à 0 RES_EVENT Bit 1 : remise à zéro des événements mémorisés RES_ERROR Bit 0 : remise à zéro des états d'erreur mémorisés
Octet 11 – Bits 0 à 7 : réserve ; les bits doivent être mis à 0 * Si des valeurs sont chargées simultanément via LD_SLOT_0 et LD_SLOT_1, la valeur de Slot 0 est d'abord reprise en
interne puis celle de Slot 1. De ce fait, des états intermédiaires inattendus peuvent survenir.

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 149
Explications des bits de commande Bit de commande Explications EN_CAPTURE Ce bit sert à valider la fonction de Capture. Une remise à 0 du bit remet à 0 un EVENT_CAP
mis à 1 dans l'interface de compte rendu. EN_SYNC_DN Ce bit sert à valider la synchronisation du compteur dans le sens de décomptage lors de
l'utilisation d'un codeur incrémental ou d'un générateur d'impulsions. Une remise à 0 du bit remet à 0 un EVENT_SYNC mis à 1 dans l'interface de compte rendu.
EN_SYNC_UP Ce bit sert à valider la synchronisation du compteur dans le sens de comptage lors de l'utilisation d'un codeur incrémental ou d'un générateur d'impulsions. Une remise à 0 du bit remet à 0 un EVENT_SYNC mis à 1 dans l'interface de compte rendu.
RES_EVENT Ce bit sert à déclencher la remise à 0 des événements mémorisés dans les bits d'information en retour EVENT_ZERO, EVENT_OFLW, EVENT_UFLW, EVENT_CMP0, EVENT_CMP1.
RES_ERROR Ce bit sert à déclencher la remise à zéro des états d'erreur mémorisés LD_ERROR et ENC_ERROR.
SET_DIR Ce bit sert à spécifier le sens de comptage pour le type de signal "Impulsion (A)". 0 signifie : comptage 1 signifie : décomptage
SET_DQ0 Ce bit sert à mettre à 1 la sortie TOR DQ0, si TM_CTRL_DQ0 est mis sur 0. Avec la fonction "Après commande de la CPU jusqu'à la valeur de comparaison", SET_DQ0 s'applique indépendamment de TM_CTRL_DQ0 tant que la valeur de comptage ne correspond pas à la valeur de comparaison.
SET_DQ1 Ce bit sert à mettre à 1 la sortie TOR DQ1, si TM_CTRL_DQ1 est mis à 0. Avec la fonction "Après commande de CPU jusqu'à la valeur de comparaison", SET_DQ1 s'applique indépendamment de TM_CTRL_DQ1 tant que la valeur de comptage ne correspond pas à la valeur de comparaison.
SW_GATE Ce bit sert à donner et retirer la validation logicielle lors de l'utilisation d'un codeur incrémental ou d'un générateur d'impulsions. La validation logicielle combinée à la validation matérielle fournit la validation interne. Le module technologique compte seulement quand la validation interne est donnée. 0 signifie : inhibition logicielle 1 signifie : validation logicielle
TM_CTRL_DQ0 Ce bit sert à valider la fonction technologique de la sortie TOR DQ0. 0 signifie : SET_DQ0 détermine l'état de DQ0 1 signifie : la fonction paramétrée détermine l'état de DQ0
TM_CTRL_DQ1 Ce bit sert à valider la fonction technologique de la sortie TOR DQ1. 0 signifie : SET_DQ1 détermine l'état de DQ1 1 signifie : la fonction paramétrée détermine l'état de DQ1

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position 150 Description fonctionnelle, 02/2014, A5E32010205-AB
4.5.2 Affectation de l'interface de compte-rendu Le programme utilisateur reçoit les valeurs actuelles et les informations d'état du module technologique via l'interface de compte rendu.
Interface de compte rendu par voie Le tableau suivant montre l'affectation de l'interface de compte rendu :
Décalage de l'adresse de début
Paramètres Signification
Octets 0 … 3 COUNT VALUE Valeur de comptage ou de position actuelle Octets 4 … 7 CAPTURED VALUE Dernière valeur de Capture acquise Octets 8 … 11 MEASURED VALUE Valeur de mesure actuelle ou télégramme SSI complet Octet 12 – Bits 3 à 7 : Réservé ; mis à 0
LD_ERROR Bit 2 : Erreur lors du chargement via l'interface de commande ENC_ERROR Bit 1 : Signal de capteur ou télégramme SSI erroné POWER_ERROR Bit 0 : Module S7-1500 : tension d'alimentation L+ erronée / module
ET 200SP : tension d'alimentation trop faible L+ Octet 13 – Bits 6 à 7 : Réservé ; mis à 0
STS_SW_GATE Bit 5 : Etat validation logicielle (pour codeur incrémental ou générateur d'impulsions)
STS_READY Bit 4 : Module technologique démarré et paramétré LD_STS_SLOT_1 Bit 3 : Demande de chargement pour Slot 1 détectée et exécutée
(commutation) LD_STS_SLOT_0 Bit 2 : Demande de chargement pour Slot 0 détectée et exécutée
(commutation) RES_EVENT_ACK Bit 1 : Remise à zéro des bits d'événement activée – Bit 0 : Réservé ; mis à 0
Octet 14 STS_DI2 (TM Count) Bit 7 : TM Count: état DI2 / TM PosInput : Réservé ; mis à 0 STS_DI1 Bit 6 : état DI1 STS_DI0 Bit 5 : état DI0 STS_DQ1 Bit 4 : état DQ1 STS_DQ0 Bit 3 : état DQ0 STS_GATE Bit 2 : Etat de la validation interne (pour codeur incrémental ou générateur
d'impulsions) STS_CNT Bit 1 : impulsion de comptage ou modification de la valeur de position
détectée dans les dernières 0,5 s env. STS_DIR Bit 0 : Sens de la dernière modification de la valeur de comptage ou de
position
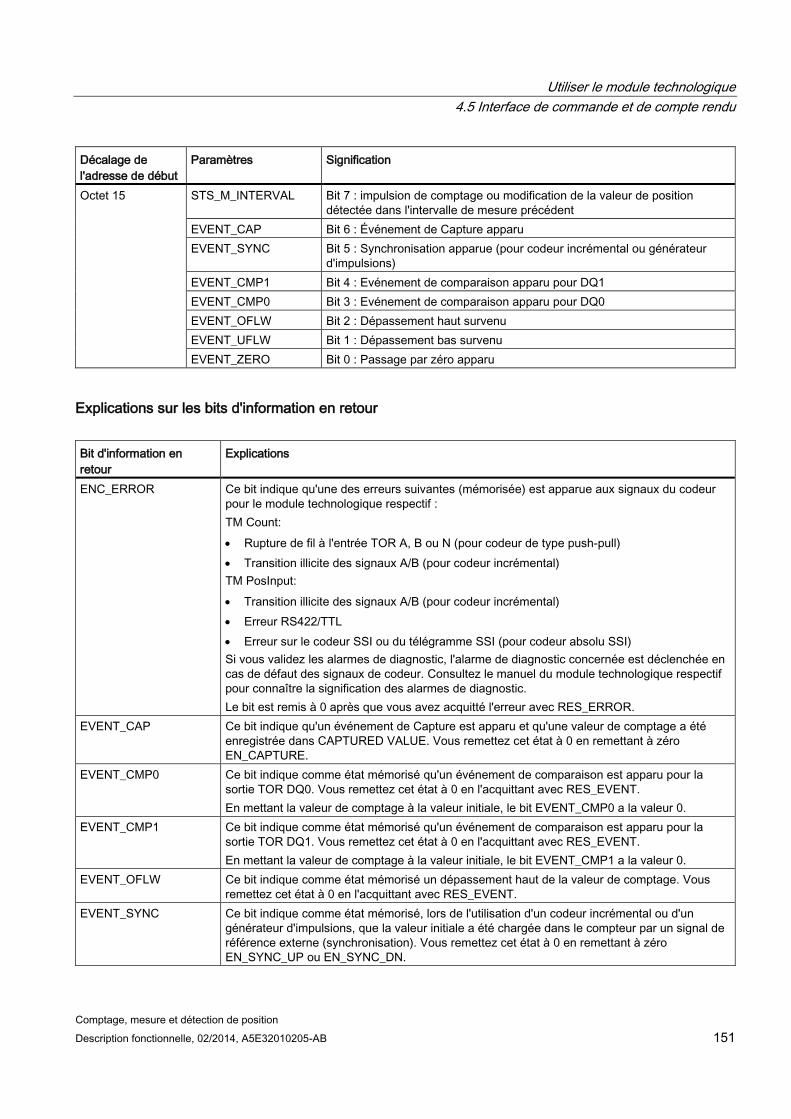
Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 151
Décalage de l'adresse de début
Paramètres Signification
Octet 15 STS_M_INTERVAL Bit 7 : impulsion de comptage ou modification de la valeur de position détectée dans l'intervalle de mesure précédent
EVENT_CAP Bit 6 : Événement de Capture apparu EVENT_SYNC Bit 5 : Synchronisation apparue (pour codeur incrémental ou générateur
d'impulsions) EVENT_CMP1 Bit 4 : Evénement de comparaison apparu pour DQ1 EVENT_CMP0 Bit 3 : Evénement de comparaison apparu pour DQ0 EVENT_OFLW Bit 2 : Dépassement haut survenu EVENT_UFLW Bit 1 : Dépassement bas survenu EVENT_ZERO Bit 0 : Passage par zéro apparu
Explications sur les bits d'information en retour Bit d'information en retour
Explications
ENC_ERROR Ce bit indique qu'une des erreurs suivantes (mémorisée) est apparue aux signaux du codeur pour le module technologique respectif : TM Count: • Rupture de fil à l'entrée TOR A, B ou N (pour codeur de type push-pull) • Transition illicite des signaux A/B (pour codeur incrémental) TM PosInput: • Transition illicite des signaux A/B (pour codeur incrémental) • Erreur RS422/TTL • Erreur sur le codeur SSI ou du télégramme SSI (pour codeur absolu SSI) Si vous validez les alarmes de diagnostic, l'alarme de diagnostic concernée est déclenchée en cas de défaut des signaux de codeur. Consultez le manuel du module technologique respectif pour connaître la signification des alarmes de diagnostic. Le bit est remis à 0 après que vous avez acquitté l'erreur avec RES_ERROR.
EVENT_CAP Ce bit indique qu'un événement de Capture est apparu et qu'une valeur de comptage a été enregistrée dans CAPTURED VALUE. Vous remettez cet état à 0 en remettant à zéro EN_CAPTURE.
EVENT_CMP0 Ce bit indique comme état mémorisé qu'un événement de comparaison est apparu pour la sortie TOR DQ0. Vous remettez cet état à 0 en l'acquittant avec RES_EVENT. En mettant la valeur de comptage à la valeur initiale, le bit EVENT_CMP0 a la valeur 0.
EVENT_CMP1 Ce bit indique comme état mémorisé qu'un événement de comparaison est apparu pour la sortie TOR DQ1. Vous remettez cet état à 0 en l'acquittant avec RES_EVENT. En mettant la valeur de comptage à la valeur initiale, le bit EVENT_CMP1 a la valeur 0.
EVENT_OFLW Ce bit indique comme état mémorisé un dépassement haut de la valeur de comptage. Vous remettez cet état à 0 en l'acquittant avec RES_EVENT.
EVENT_SYNC Ce bit indique comme état mémorisé, lors de l'utilisation d'un codeur incrémental ou d'un générateur d'impulsions, que la valeur initiale a été chargée dans le compteur par un signal de référence externe (synchronisation). Vous remettez cet état à 0 en remettant à zéro EN_SYNC_UP ou EN_SYNC_DN.

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position 152 Description fonctionnelle, 02/2014, A5E32010205-AB
Bit d'information en retour
Explications
EVENT_UFLW Ce bit indique comme état mémorisé un dépassement bas de la valeur de comptage. Vous remettez cet état à 0 en l'acquittant avec RES_EVENT.
EVENT_ZERO Ce bit indique comme état mémorisé que la valeur de comptage ou la valeur de position est passée par zéro. Vous remettez cet état à 0 en l'acquittant avec RES_EVENT.
LD_ERROR Ce bit indique qu'une erreur (mémorisée) est apparue lors du chargement via l'interface de commande. Les valeurs chargées ne sont pas acceptées. L'une des conditions suivantes n'est pas remplie si un codeur incrémental ou un générateur d'impulsions est utilisé : • limite inférieure de comptage <= valeur de comptage <= limite supérieure de comptage • limite inférieure de comptage <= valeur initiale <= limite supérieure de comptage • limite inférieure de comptage <= valeur de comparaison 0/1 <= limite supérieure de
comptage • valeur de comparaison 0 < valeur de comparaison 1 L'une des conditions suivantes n'est pas remplie si un codeur absolu SSI est utilisé : • 0 <= Valeur de position <= Valeur de position maximale • 0 <= Valeur de comparaison 0/1 <= Valeur de position maximale • Valeur de comparaison 0 < Valeur de comparaison 1 Le bit est remis à 0 après que vous avez acquitté l'erreur avec RES_ERROR.
LD_STS_SLOT_0 Ce bit indique par un changement d'état (commutation) que la demande de chargement pour Slot 0 (LD_SLOT_0) a été détectée et réalisée.
LD_STS_SLOT_1 Ce bit indique par un changement d'état (commutation) que la demande de chargement pour Slot 1 (LD_SLOT_1) a été détectée et réalisée.
POWER_ERROR Ce bit indique, pour un module technologique S7-1500, que la tension d'alimentation L+ est absente ou trop basse, ou que le connecteur frontal n'est pas enfiché. Ce bit indique, pour un module technologique ET 200SP, que la tension d'alimentation L+ est trop basse. Si la tension d'alimentation L+ est correctement rétablie, POWER_ERROR est automatiquement mis sur 0.
RES_EVENT_ACK Ce bit indique que la remise à 0 des bits d'événement EVENT_SYNC, EVENT_CMP0, EVENT_CMP1, EVENT_OFLW, EVENT_UFLW, EVENT_ZERO est activée.
STS_CNT Ce bit indique qu'au moins une impulsion de comptage ou une modification de la valeur de position a été acquise dans les dernières 0,5 s env.
STS_DI0 Ce bit indique l'état de l'entrée TOR DI0. STS_DI1 Ce bit indique l'état de l'entrée TOR DI1. STS_DI2 Ce bit indique l'état de l'entrée TOR DI2 de TM Count. STS_DIR Ce bit indique le sens de comptage de la dernière impulsion de comptage ou le sens de la
dernière modification de la valeur de position. 0 signifie : décomptage 1 signifie : comptage
STS_DQ0 Ce bit indique l'état de la sortie TOR DQ0. STS_DQ1 Ce bit indique l'état de la sortie TOR DQ1. STS_GATE Ce bit indique l'état de la validation interne lors de l'utilisation d'un codeur incrémental ou d'un
générateur d'impulsions. 0 signifie : inhibition 1 signifie : validation
STS_M_INTERVAL Ce bit indique qu'au moins une impulsion ou une modification de la valeur de position a été acquise dans l'intervalle de mesure précédent.

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 153
Bit d'information en retour
Explications
STS_READY Ce bit indique que le module technologique fournit des données utiles valides. Le module technologique est démarré et paramétré.
STS_SW_GATE Ce bit indique l'état de la validation logicielle. 0 signifie : inhibition 1 signifie : validation
Principe d'acquittement intégral Les bits avec mémorisation sont acquittés selon le principe d'acquittement intégral.
La figure suivante montre un exemple de déroulement du principe d'acquittement intégral en cas de débordement haut :
① Le bit d'information en retour EVENT_OFLW est défini comme événement avec mémorisation
en cas de débordement haut. ② Le bit de commande RES_EVENT est mis à 1 pour déclencher la remise à zéro de
EVENT_OFLW. ③ Le bit d'information en retour RES_EVENT_ACK est mis à 1 si la remise à zéro de
EVENT_OFLW a été détectée. ④ Le bit de commande RES_EVENT est remis à 0. ⑤ Le bit d'information en retour RES_EVENT_ACK est mis à 0.

Utiliser le module technologique 4.5 Interface de commande et de compte rendu
Comptage, mesure et détection de position 154 Description fonctionnelle, 02/2014, A5E32010205-AB

Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 155
Service & Support A
Offre complète unique, sur l'intégralité du cycle de vie Pour tous les constructeurs de machines, fournisseurs de solutions ou exploitants d'installations : l'offre de services de Siemens Industry Automation and Drive Technologies comprend des services complets à l'intention des utilisateurs les plus divers de toutes les branches de l'industrie manufacturière et des processus.
Nous offrons, pour tous nos produits et systèmes, des prestations de service cohérentes et structurées qui apportent une assistance précieuse dans toutes les phases du cycle de vie de votre machine ou de votre installation, de l'étude de projet à la maintenance et à la modernisation, en passant par la réalisation et la mise en service.
Notre service d'assistance Service & Support vous accompagne dans le monde entier pour toutes les questions relatives aux techniques d'automatisation et d'entraînement de Siemens. Directement sur place dans plus de 100 pays et pendant toutes les phases du cycle de vie de vos machines et installations.
Une équipe de spécialistes expérimentés est à votre disposition pour vous assister efficacement grâce à une concentration de savoir-faire unique. Des formations régulières et un contact intensif de nos collaborateurs entre eux – à travers tous les continents – garantissent un service fiable dans une multitude de domaines.

Service & Support
Comptage, mesure et détection de position 156 Description fonctionnelle, 02/2014, A5E32010205-AB
Assistance en ligne (Online Support) La plate-forme d'information en ligne exhaustive de notre Service & Support vous assiste à tout moment et en tout lieu dans le monde entier.
Vous trouverez l'assistance en ligne sur Internet (http://www.siemens.com/automation/service&support) à l'adresse suivante.
Conseil technique (Technical Consulting) Assistance en phase d'étude et de conception de votre projet : de l'analyse détaillée de la situation réelle aboutissant à la définition des objectifs, en passant par la consultation sur toutes les questions concernant les produits et systèmes jusqu'à l'élaboration de votre solution d'automatisme.
Assistance technique (Technical Support) Des conseils compétents sur toutes les questions techniques avec un large éventail de prestations sur mesure associées à nos produits et systèmes.
Vous trouverez l'assistance technique sur Internet (http://www.siemens.com/automation/support-request) à l'adresse suivante.
Formation Renforcez votre avantage concurrentiel – grâce à un savoir-faire pratique directement du constructeur.
Vous trouverez notre offre de formation sur Internet (http://www.siemens.com/sitrain) à l'adresse suivante.
Assistance ingénierie (Engineering Support) Assistance au niveau étude du projet et développement grâce à des services adaptés allant de la configuration à la mise en œuvre d'un projet d'automatisation.
Service sur site (Field Service) Avec notre service sur site, nous offrons des prestations exhaustives de mise en service et de maintenance, afin de garantir la disponibilité de vos machines et de vos installations dans toutes les situations.
Pièces de rechange Dans toutes les branches, partout dans le monde, les exigences de disponibilité des installations et des systèmes croissent. Nous vous aidons à éviter tout arrêt des installations : au moyen d'un réseau mondial et de chaînes logistiques optimales.

Service & Support
Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 157
Réparations Les périodes d'arrêt sont synonymes d'entrave au fonctionnement et de coûts inutiles. Nous vous aidons à les limiter autant que possible et vous offrons des possibilités de réparation partout dans le monde.
Optimisation Durant la phase d'exploitation des machines ou des installations, il existe souvent un potentiel important d'augmentation de la productivité ou de réduction des coûts.
Pour le détecter et vous en faire profiter, nous vous offrons une gamme de services relatifs à l'optimisation.
Modernisation Notre assistance couvre également la modernisation, avec des prestations complètes allant de la planification à la mise en service.
Programmes de service Nos programmes de service sont des paquets de prestations ciblés destinés à un groupe précis de systèmes ou de produits des techniques d'automatisation et d'entraînement. Les différents services sont harmonisés sur tout le cycle de vie et vous assistent pour une utilisation optimale de vos produits et systèmes.
Il est possible d'adapter à volonté les prestations d'un programme de services et de les utiliser indépendamment les unes des autres.
Exemples de programmes de services :
● Contrats de services
● Plant IT Security Services (services de sécurité informatique des installations)
● Life Cycle Services (services cycle de vie) pour entraînements
● SIMATIC PCS 7 Life Cycle Services (services cycle de vie pour SIMATIC PCS 7)
● SINUMERIK Manufacturing Excellence
● SIMATIC Remote Support Services (services de téléassistance SIMATIC)
Les avantages en bref :
● Des temps d'arrêt réduits pour une productivité accrue
● Des coûts de maintenance optimaux grâce à des prestations sur mesure
● Coûts calculables et par conséquent planifiables
● Fiabilité du service grâce à des temps de réaction et à des délais de livraison des pièces de rechange garantis
● Complément et décharge du personnel de maintenance de l'exploitant
● Service complet centralisé et non dispersé et savoir-faire maximal

Service & Support
Comptage, mesure et détection de position 158 Description fonctionnelle, 02/2014, A5E32010205-AB
Interlocuteur A votre disposition sur place, dans le monde entier : des partenaires en matière de conseils, vente, formation, maintenance, assistance, pièces de rechange... pour l'ensemble de l'offre Industry Automation and Drive Technologies.
Vous trouverez votre interlocuteur personnel dans notre base de données d'interlocuteurs sur Internet (http://www.siemens.com/automation/partner).

Comptage, mesure et détection de position Description fonctionnelle, 02/2014, A5E32010205-AB 159
Index
A Alarme de diagnostic, 58
Validation, 110 Alarme de processus, 58
perdue, 114 Validation, 116
Appel High_Speed_Counter, 93
Arrêt de la CPU, 109
C Capture, 83, 124, 133 Code binaire, 58 Code de Gray, 58 Codeur absolu, 17 Codeur absolu SSI, 129, 130 Commande par validation, 83, 124 Commutateur M, 78, 121 Commutateur P, 78, 121 Comptage
Valeur de comparaison, 87, 135
D Détection de position
avec codeur absolu SSI, 17 avec Motion Control, 58
Diagnostic High_Speed_Counter, 105 Module technologique, 142
E Entrée TOR
Fonctions, 83, 124, 133, 134 ErrorID, 100 Evaluation du signal, 77, 121
F Fonctionnement
High_Speed_Counter, 93 Fonctions de comptage, 15 Fonctions de mesure, 46 Fréquence de filtre, 78, 121
H High_Speed_Counter, 69, 93
Appel, 93 Configurer, 73 Description, 93 Diagnostic, 105 Fonctionnement, 93 Mise en service, 103 Paramètres de base, 75 Paramètres de sortie, 99 Paramètres d'entrée, 97 Programmer, 92 Réaction en cas d'erreur, 96 Variables statiques, 102
Hystérésis, 54, 56, 89, 137
I Interface de commande, 147 Interface de compte rendu, 150 Intervalle de mesure, 51
L Limites de comptage, 15, 18, 81
M Mesure
Valeur de comparaison, 127 Mesure de fréquence, 46 Mesure de période, 46 Mesure de vitesse, 46 Mise en service
High_Speed_Counter, 103 Module technologique, 143

Index
Comptage, mesure et détection de position 160 Description fonctionnelle, 02/2014, A5E32010205-AB
Mode de fonctionnement, 111 Mesure, 119
Mode synchrone, 68 Module technologique
Caractéristiques de service, 11 Configuration matérielle, 107 En ligne & Diagnostic, 142 Interface de commande, 147 Interface de compte rendu, 150 paramétrer, 117 Paramètres de base, 109 Utilisations possibles, 13
O Objet technologique
High_Speed_Counter, 69
P Paramétrage
Module technologique, 14, 117 Paramètre
ErrorID, 100 Paramètres de base
High_Speed_Counter, Module technologique, 109
Paramètres de sortie High_Speed_Counter, 99
Paramètres d'entrée High_Speed_Counter, 97
Période d'actualisation, 46 Plage de mesure, 47, 51
R Réaction à un arrêt de la CPU, 109 Réaction en cas d'erreur
High_Speed_Counter, 96 Rupture de fil, 110
S Signal N, 78, 121 Sortie TOR
Fonctions, 87, 127, 135 Valeur de comparaison, 35, 87, 127, 135
SW_GATE, 20 Synchronisation, 16, 27, 83, 124
en cas de signal N, 32 par entrée TOR, 30
T Type de capteur, 78, 121 Type de signal, 76, 120, 129
V Valeur de comparaison, 35, 87, 127, 135
Comptage, 87, 135 Mesure, 127
Valeur initiale, 15, 81 Validation
Alarme de diagnostic, 58 Alarme de processus, 58
Validation logicielle, 15, 20 Validation matérielle, 15, 20, 83, 124 Variables statiques
High_Speed_Counter, 102