overview of team ford: active park assist software engineering - cse435 michigan state university...
TRANSCRIPT

Overview of Team Ford: Active Park AssistSoftware Engineering - CSE435
Michigan State UniversityFall 2014
Team members:Project Manager: Joe ReederFacilitator: Kenneth MichaelCustomer Liason: Ryan BoyceConfiguration Manager: Ethan EttemaSafety Engineering: Stephanie Brown
Customer: Eileen Davidson, Ford Motor Company
Instructor: Dr. Betty H.C. Cheng*
*Please direct all inquiries to the instructor.
Project Overview
•System provides automated parallel and perpendicular parking services
•Designed to provide a safer parking experience▫Eliminates human error in parking▫Facilitates steering, acceleration, and
braking▫Provides simple, easy-to-use interface

Overview of Features
•Automated parallel or perpendicular parking
•Ultra-sonic sensors on all sides to measure space availability
•Cameras on front and rear to provide live view to customer
•Ultrasonic sensors and camera work together to detect and prevent collision

Overview of Features (cont.)
•Options for driver to terminate process before completion
•System memory to immediately continue parking process after interruption without need for reassessment

Overview of Features (cont.)• Human Machine Interface for system interaction• Convenient use through touch screen menus• Highlights potential parking spaces• Displays system warnings to user
• Safety Features• Avoids collisions with obstacles detected while
system is active• System timeout to prevent malicious use• Seed and key subsystem communication

Domain Research
• Investigated active park assist systems currently available on the market
• Researched potential security vulnerabilities for current embedded systems
• Needed to apply domain knowledge to embedded system design and application

Project Constraints
• Vehicles with shift by wire transmission only
• Failure of any hardware component disables uses of APA system
• System must avoid collision with obstacles detected by sensors during parking maneuvers
• Once system initiated, process must be completed within 75 seconds

Part II: Model-Based View of System
Parallel Park
Verify
Perpendicular Park
Display Camera Images
Deactivate System
Maneuver Vehicle
Into Spot
Identify Parking
Spot
Detect Obstacl
e
Activate
System
<<includes>>
<<includes>>
<<includes>>
<<includes>>
<<extends>>
Driver
Obstacle
Active Park Assist
Part III: Demonstration• JavaScript application
to simulate HMI•Example scenarios
▫Successful parallel parking
▫User aborts maneuver by braking
▫Obstacle encountered
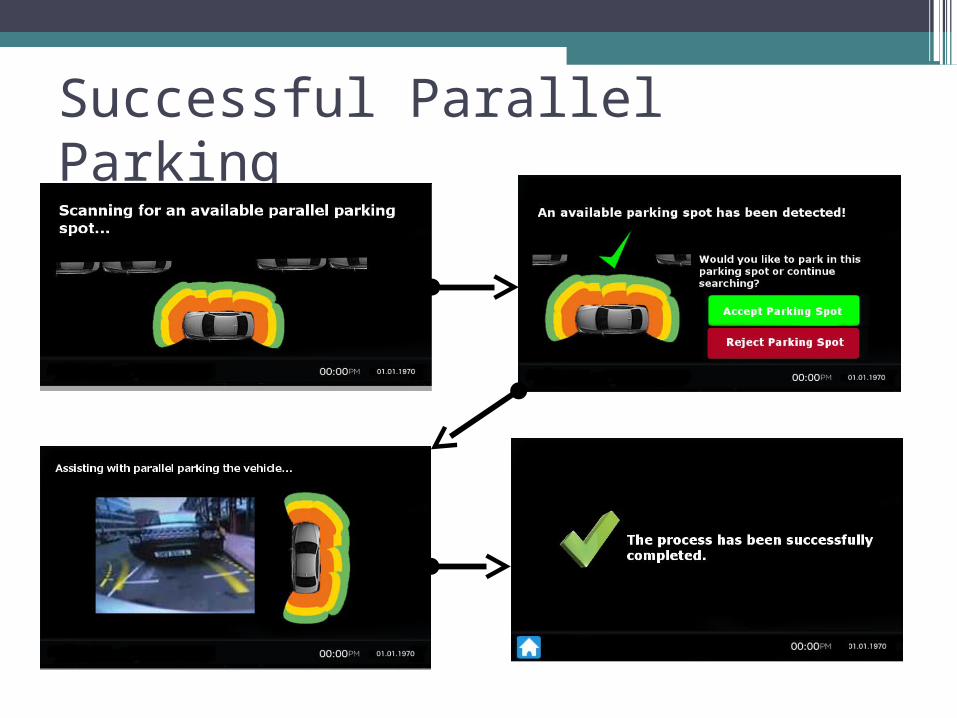
Successful Parallel Parking

User Aborts Maneuver By Braking

Obstacle Encountered - Timeout
Acknowledgements
•We gratefully acknowledge and appreciate the participation of our customer, Eileen Davidson from Ford Motor Company