positioning in ad-hoc networks - a problem statement jan beutel computer engineering and networks...
TRANSCRIPT
Positioning in Ad-Hoc Networks-
A Problem Statement
Jan BeutelComputer Engineering and Networks Lab
Swiss Federal Institute of Technology (ETH) Zurich
June 20, 2001
Computer EngineeringComputer Engineeringand Networks Laboratoryand Networks Laboratory

2
ETH
Zuri
ch
Jan Beutel, March 26, 2001Jan Beutel, March 26, 2001
Network Scenarios

3
ETH
Zuri
ch
Jan Beutel, March 26, 2001Jan Beutel, March 26, 2001
Positioning: Environment
• Stationary and Dynamic Environments
• Graph Connectivity
– Node Clusters
– Node Depletion
• Variance in
– Initial Position Estimates
– Range Estimates
• Map Data, Lookup Tables
• Multiple Link Reception Capability of Nodes
• Low Duty Cycle Radio Frontend
• Incorporate Positioning System in Communication Framework
4
ETH
Zuri
ch
Jan Beutel, March 26, 2001Jan Beutel, March 26, 2001
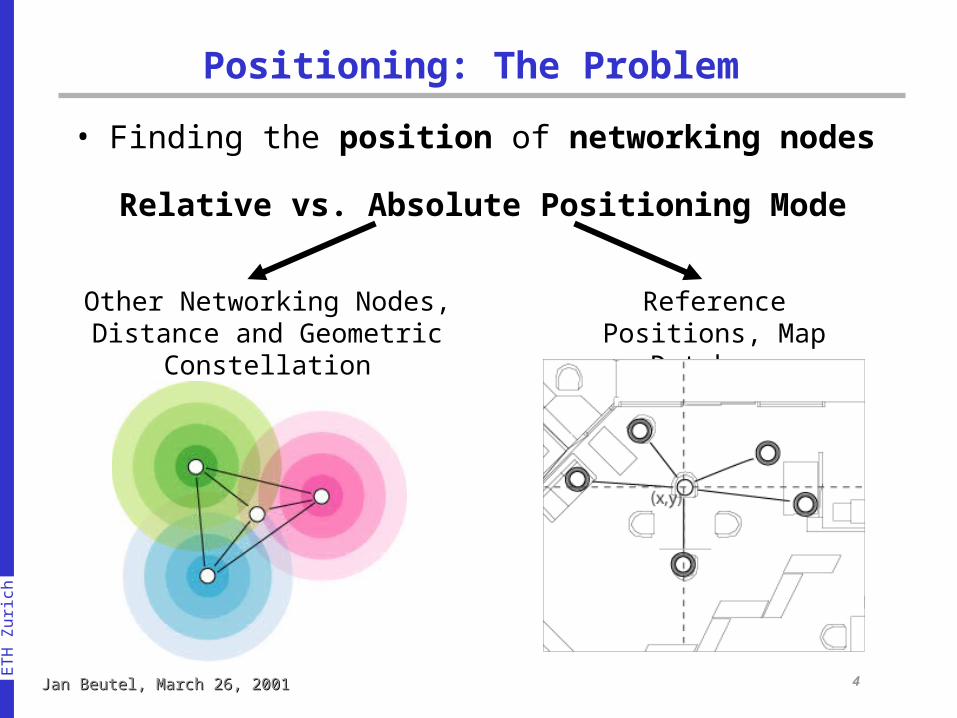
Positioning: The Problem
• Finding the position of networking nodes
Relative vs. Absolute Positioning Mode
Reference Positions, Map
Database
Other Networking Nodes, Distance and Geometric
Constellation

5
ETH
Zuri
ch
Jan Beutel, March 26, 2001Jan Beutel, March 26, 2001
Positioning: Definitions
• anchor node knows its location at start of algorithm
• unknown node does not know its location
• settled node has discovered its location
• neighborhood all nodes within one hop
• Context dependent on Positioning Mode
– Absolute Coordinates (Xi,Yi) Position
– Relative Coordinates (xi-X0,yi-X0) Orientation, Topology
– Range Value ri Proximity to Neighbors
6
ETH
Zuri
ch
Jan Beutel, March 26, 2001Jan Beutel, March 26, 2001
Positioning: Granularity
• Granularity of Solution Depends on– Network population (nodes/area)– Geometric constellation (Dilution of Precision)– Amount of settled nodes (convergence)– Dynamics in networking nodes (network links/area)– Bounds of the geometric solution
• Coarse Grain Positioning– Cell based proximity– Coarse topology discovery– Low precision coordinates– Invariants
• Fine Grain Positioning– High precision coordinates– Orientation
7
ETH
Zuri
ch
Jan Beutel, March 26, 2001Jan Beutel, March 26, 2001
Existing Solutions
• Cell Based Identification
• Triangulation to Base Stations (AOA, TDOA, TOA, RSSI, Carrier Phase…)– Global Positioning System– Radar/VOR– Mobile Phones
• Depending on Uni-/Bi-directional Communication Link
• Probability Spaces• Mapping to RF Reference Mappings• Event Based• Topology Information
8
ETH
Zuri
ch
Jan Beutel, March 26, 2001Jan Beutel, March 26, 2001
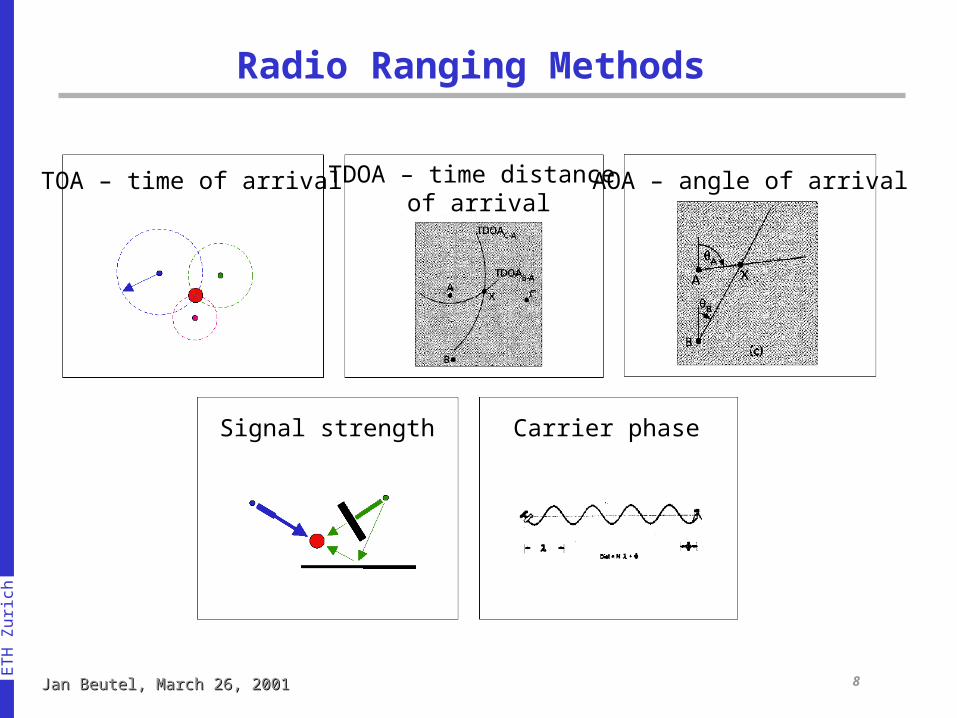
Radio Ranging Methods
TOA – time of arrival
Carrier phase
AOA – angle of arrival
Signal strength
TDOA – time distance of arrival
9
ETH
Zuri
ch
Jan Beutel, March 26, 2001Jan Beutel, March 26, 2001
Positioning Scenarios
• Initialization– Problem: Convergence
• Iteration– Single connected graphs– No dynamics– Problem: Large Amount of Data
• Motion– Multiple disconnected graphs– Mobile nodes– Additional metric incorporated– Problem: Distributed System

10
ETH
Zuri
ch
Jan Beutel, March 26, 2001Jan Beutel, March 26, 2001
Algorithms for Positioning
• Case: No Anchors available
Idea: Reuse High Connectivity

11
ETH
Zuri
ch
Jan Beutel, March 26, 2001Jan Beutel, March 26, 2001
Redundant Triangulation
Iteration on 25 individual ranges with 50% each
0 0.5 10
0.2
0.4
0.6
0.8
1
Delaunay Mesh of 25 Networked Nodes
x
0 0.5 10
0.2
0.4
0.6
0.8
1
Solution on 25 Ranges and 50% Error
x
0 0.5 10
0.2
0.4
0.6
0.8
1
50 Solutions and Mean
x
0.4 0.45 0.5 0.55 0.60.4
0.45
0.5
0.55
0.6
Zoom on Error
x
dx 0.0054
dy 0.0058
1% error
12
ETH
Zuri
ch
Jan Beutel, March 26, 2001Jan Beutel, March 26, 2001
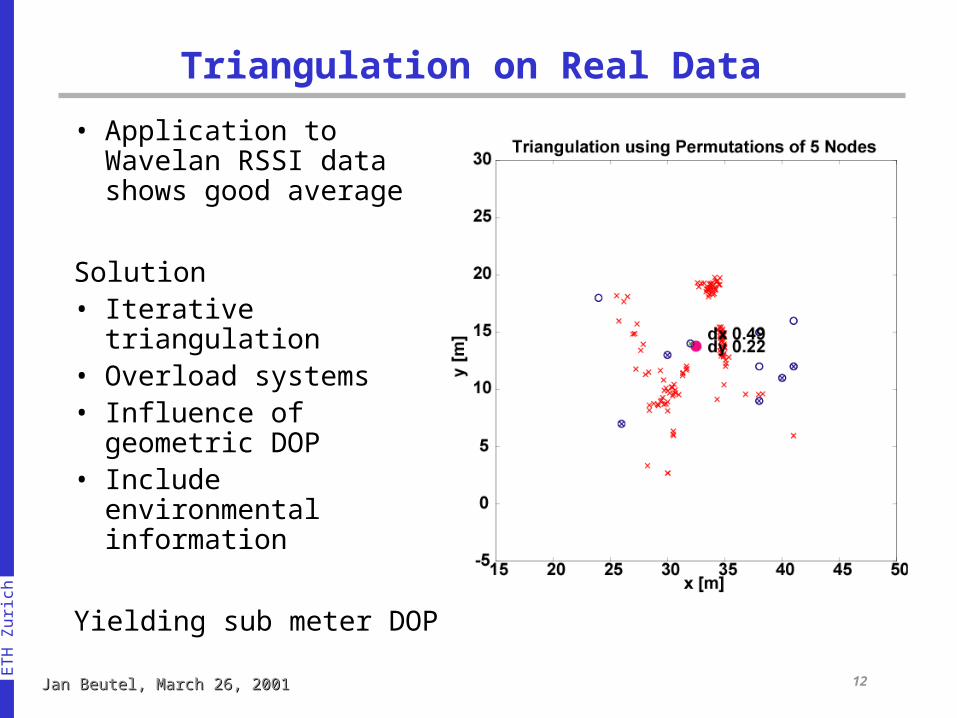
Triangulation on Real Data
• Application to Wavelan RSSI data shows good average
Solution• Iterative triangulation• Overload systems• Influence of
geometric DOP• Include
environmental information
Yielding sub meter DOP

13
ETH
Zuri
ch
Jan Beutel, March 26, 2001Jan Beutel, March 26, 2001
Algorithms for Positioning
• Case: Anchors available
Idea: Propagate Reference Data
14
ETH
Zuri
ch
Jan Beutel, March 26, 2001Jan Beutel, March 26, 2001
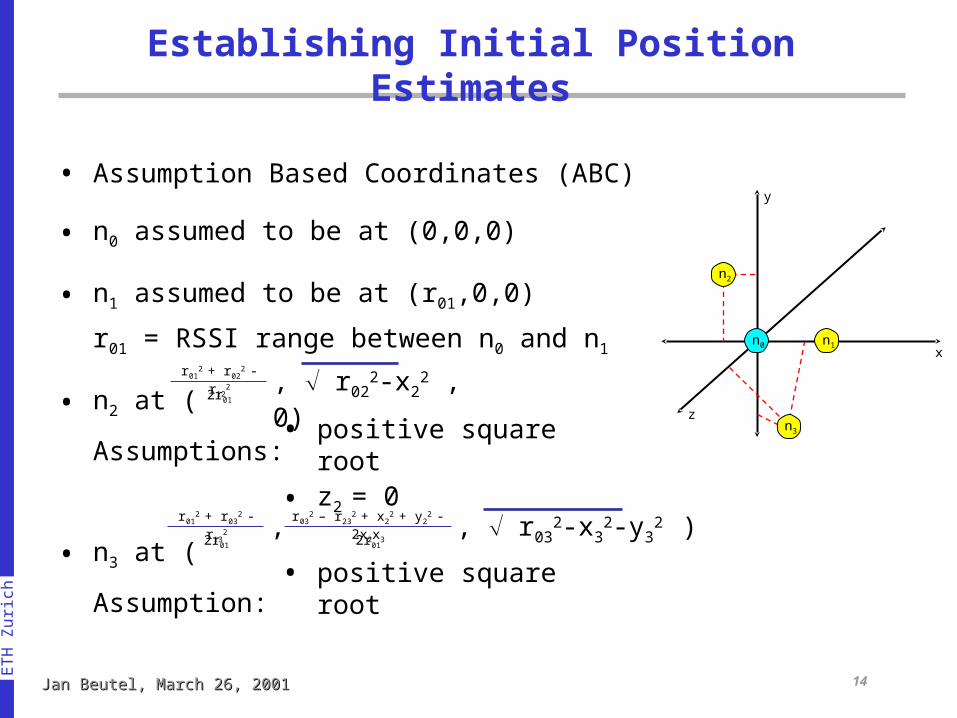
Establishing Initial Position Estimates
• Assumption Based Coordinates (ABC)
• n0 assumed to be at (0,0,0)
• n1 assumed to be at (r01,0,0)
r01 = RSSI range between n0 and n1
• n2 at (
Assumptions:
• n3 at (
Assumption:
r012 + r03
2 - r132
2r01
, r032-x3
2-y32 )
r032 – r23
2 + x22 + y2
2 - 2x2x3
2r01
,
r012 + r02
2 - r122
2r01
, r022-x2
2 , 0)x
y
z
n0 n1
n2
n3• positive square root• z2 = 0
• positive square root

15
ETH
Zuri
ch
Jan Beutel, March 26, 2001Jan Beutel, March 26, 2001
The TERRAIN Algorithm
• Triangulation via Extended Range and Redundant Association of Intermediate Nodes
• ABC algorithm creates maps
• Target node waits to beincluded in 3 maps
• Extended rangescalculated fromrespective maps
• Triangulation bytarget node basedon extended ranges
• Iterate network-widetriangulation
1
2
3
radio range
extended range
intermediate node
16
ETH
Zuri
ch
Jan Beutel, March 26, 2001Jan Beutel, March 26, 2001
Status
• Simulations yielding first results– Redundant triangulation works well– Range error impacts more than initial position– Initialization/Convergence a problem
• Testbed in setup phase– Smart it’s – BTnode– Multihop BT Prototype
• Simulation with real data in preperation
17
ETH
Zuri
ch
Jan Beutel, March 26, 2001Jan Beutel, March 26, 2001
Algorithms for Positioning using Bluetooth
• Appropriate HCI Commands and Events– Find Neighbors
• HCI_INQUIRY
– Classify Neighbors• HCI_READ_REMOTE_SUPPORTED_FEATURES
– Continuity in Neighbors• HCI_READ_CLOCK_OFFSET• HCI_READ_CONNECTION_ACCEPT_TIMEOUT• HCI_READ_PAGE_TIMEOUT• HCI_READ_LINK_SUPERVISION_TIMEOUT• HCI_READ_FAILED_CONTACT_NUMBER
– Find Ranges • HCI_READ_RSSI
18
ETH
Zuri
ch
Jan Beutel, March 26, 2001Jan Beutel, March 26, 2001
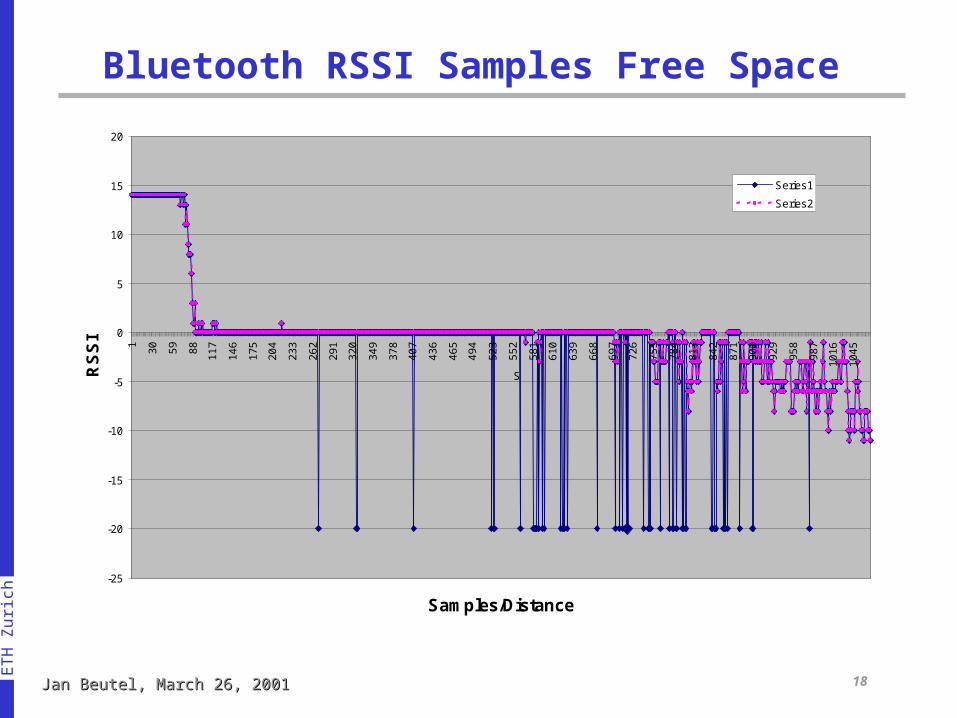
Bluetooth RSSI Samples Free Space
-25
-20
-15
-10
-5
0
5
10
15
201
30
59
88
11
7
14
6
17
5
20
4
23
3
26
2
29
1
32
0
34
9
37
8
40
7
43
6
46
5
49
4
52
3
55
2
58
1
61
0
63
9
66
8
69
7
72
6
75
5
78
4
81
3
84
2
87
1
90
0
92
9
95
8
98
7
10
16
10
45
Samples/Distance
RS
SI
Series1
Series2
S

19
ETH
Zuri
ch
Jan Beutel, March 26, 2001Jan Beutel, March 26, 2001
Bluetooth RSSI Samples Office Space
-25
-20
-15
-10
-5
0
5
10
15
201 7 13 19 25 31 37 43 49 55 61 67 73 79 85 91 97 103
109
115
121
127
133
139
145
151
157
163
169
175
181
187
193
199
Samples/Distance
RS
SI
Series1
Series2
Series3
20
ETH
Zuri
ch
Jan Beutel, March 26, 2001Jan Beutel, March 26, 2001
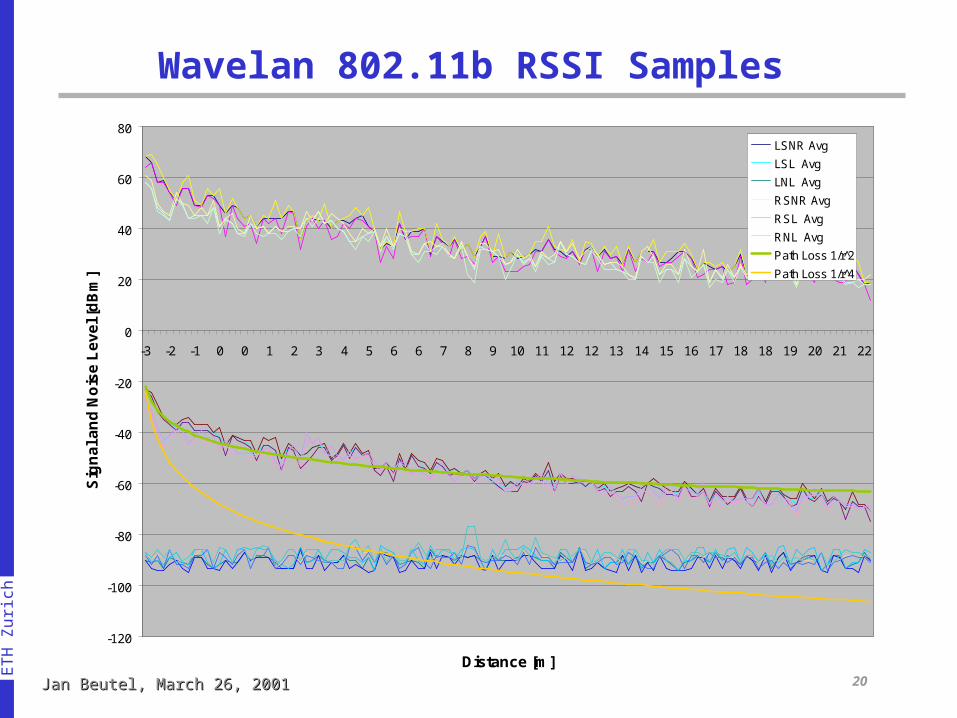
Wavelan 802.11b RSSI Samples
-120
-100
-80
-60
-40
-20
0
20
40
60
80
-3 -2 -1 0 0 1 2 3 4 5 6 6 7 8 9 10 11 12 12 13 14 15 16 17 18 18 19 20 21 22
Distance [m]
Sig
na
l an
d N
ois
e L
ev
el [
dB
m]
LSNR Avg
LSL Avg
LNL Avg
RSNR Avg
RSL Avg
RNL Avg
Path Loss 1/r 2̂
Path Loss 1/r 4̂