presentation at ipg apply & innovate: automatic generation ......automatic generation of...
TRANSCRIPT
FZ
I FO
RS
CH
UN
GS
ZE
NT
RU
M
INF
OR
MA
TIK
Automatic generation of realistic simulation
scenarios out of video recordings
Jochen Kramer, Jennifer Friedmann, Dr.-Ing. Martin Hillenbrand,
Prof. Dr.-Ing. Klaus D. Müller-Glaser
apply & innovate 2014 – IPG Technology Conference
23./24. September 2014 This project is supported by

Division ESS at FZI
Embedded Systems and Sensors Engineering
• Prof. Dr.-Ing. Klaus Müller-Glaser
• Prof. Dr.-Ing. Dr. h. c. Jürgen Becker
• Prof. Dr. rer. nat. Wilhelm Stork Prof. Dr.-Ing. Michael Hübner
Directors
• 25 research associates in Karlsruhe
• Ca. 65 students as Hiwis and for theses
• Transaction volume: 2,2 Mio €
Personnel
© FZI Research Center for Information Technology | Dipl.-Ing. Jochen Kramer 2 08.09.2014

Division ESS at FZI
Embedded Systems and Sensors Engineering
Analysis, development and testing of innovative technologies, design
methods and applications for embedded systems
Model-driven design methods and tools
technology-oriented research
application-oriented research and development projects
3 08.09.2014 © FZI Research Center for Information Technology | Dipl.-Ing. Jochen Kramer

Motivation – new Testing Approaches
08.09.2014 4 © FZI Research Center for Information Technology | Dipl.-Ing. Jochen Kramer
System
Specification
& Design
Component
Specification
& Design
Implementation
Component
Integration
System
Integration
Test
Test
Vehicle
Environment
Realistic
Scenarios
against
against
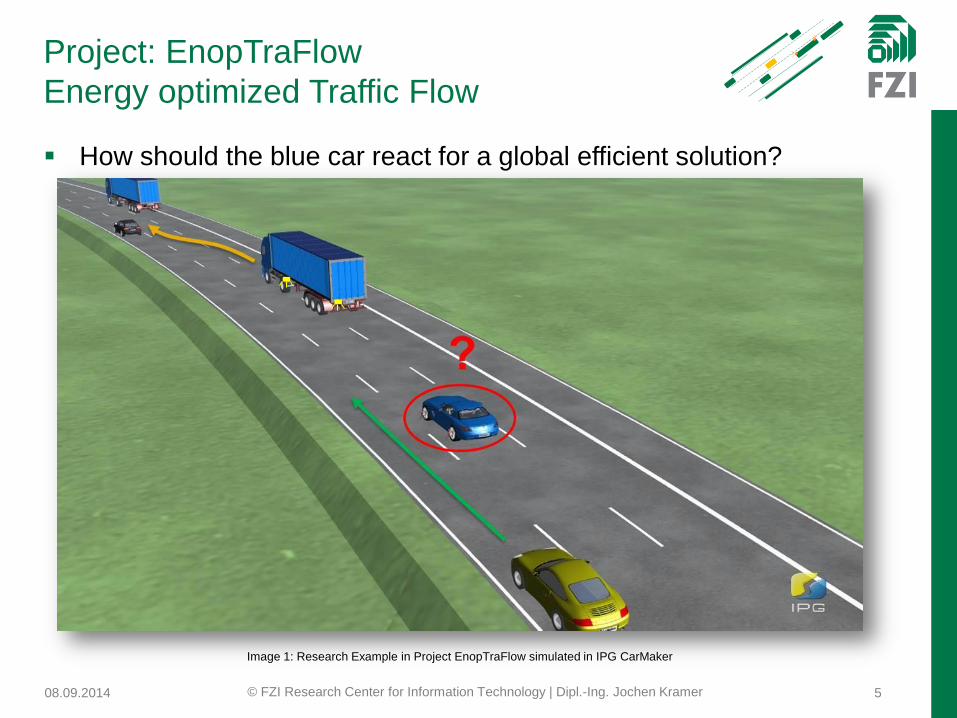
How should the blue car react for a global efficient solution?
Project: EnopTraFlow
Energy optimized Traffic Flow
08.09.2014 5 © FZI Research Center for Information Technology | Dipl.-Ing. Jochen Kramer
Image 1: Research Example in Project EnopTraFlow simulated in IPG CarMaker

Project: EnopTraFlow
Energy optimized Traffic Flow
08.09.2014 6 © FZI Research Center for Information Technology | Dipl.-Ing. Jochen Kramer
Image 2: EnopTraFlow Project Logo
?
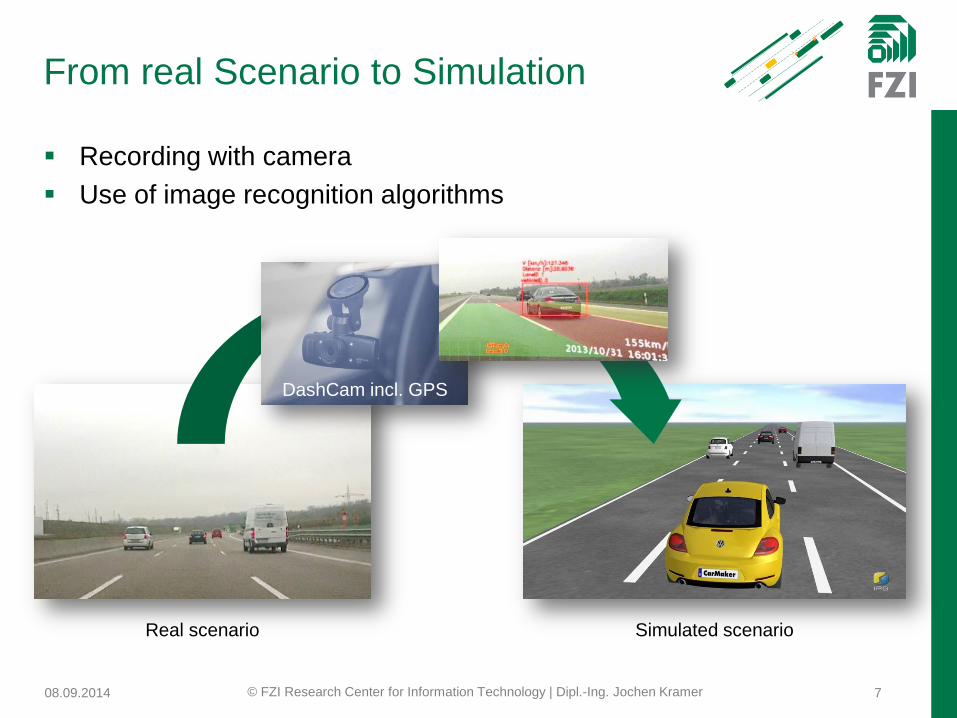
From real Scenario to Simulation
08.09.2014 7 © FZI Research Center for Information Technology | Dipl.-Ing. Jochen Kramer
Recording with camera
Use of image recognition algorithms
Real scenario Simulated scenario
DashCam incl. GPS

Transformation Process Overview
08.09.2014 8 © FZI Research Center for Information Technology | Dipl.-Ing. Jochen Kramer
D
Pre-processing
Inverse
Projective
Geometry
Vehicle
Detection
Lane
Detection
Identified Objects and Properties (e.g. reference lane, relative distance, relative speed, relative lane)
Simulation of Scenario

Transformation Process in Detail
Creation of Video Recordings
08.09.2014 9
D
Pre-processing
Inverse
Projective
Geometry
Vehicle
Detection
Lane
Detection
Identified Objects and Properties (e.g. reference lane, relative distance, relative speed, relative lane)
Simulation of Scenario
© FZI Research Center for Information Technology | Dipl.-Ing. Jochen Kramer
Creation of Video Recordings
with e.g. DashCam incl. GPS

Transformation Process in Detail
Pre-Processing
Checking video conformity
Rectification of lens deformation
Manual selection of reference points for transformation into bird’s
eye view
08.09.2014 10 © FZI Research Center for Information Technology | Dipl.-Ing. Jochen Kramer

Transformation Process in Detail
Object Recognition
Transformation of recognized objects frame by frame
Creation of object lists for each frame
Filling object lists with recognized object properties
08.09.2014 11
Frame0
Ego
Obj0
Obj1
...
… FrameN
Ego
Obj0
Obj1
…
© FZI Research Center for Information Technology | Dipl.-Ing. Jochen Kramer

© FZI Research Center for Information Technology | Dipl.-Ing. Jochen Kramer
Transformation Process in Detail
Distance and Speed Calculation
Usage of bird’s eye view
Bounding box for distance calculation between two video frames
Frame rate for time difference
08.09.2014 12
Mapping
Frame t-1 Frame t
Bottom line of
Bounding Box

Transformation Process in Detail
Post-Processing
08.09.2014 13 © FZI Research Center for Information Technology | Dipl.-Ing. Jochen Kramer

Results: Real Scenario (recorded)
08.09.2014
Video 1: Recorded scenario with object recognition
14 © FZI Research Center for Information Technology | Dipl.-Ing. Jochen Kramer

Results: Simulated Scenario
08.09.2014 15 © FZI Research Center for Information Technology | Dipl.-Ing. Jochen Kramer
Video 2: Simulated scenario in IPG CarMaker
08.09.2014 16
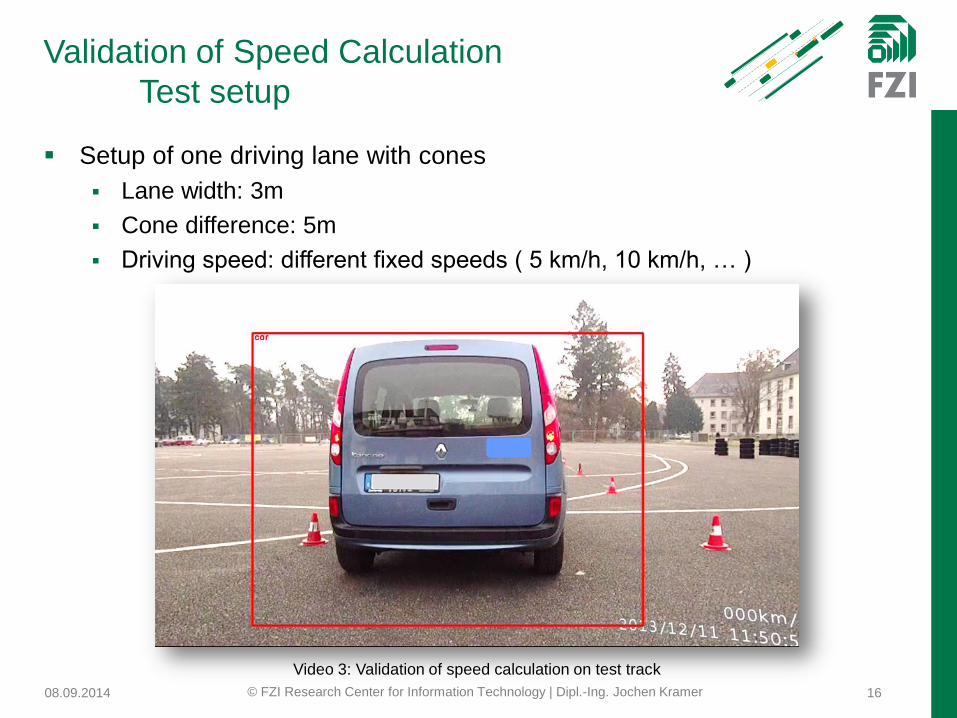
Validation of Speed Calculation
Test setup
© FZI Research Center for Information Technology | Dipl.-Ing. Jochen Kramer
Setup of one driving lane with cones
Lane width: 3m
Cone difference: 5m
Driving speed: different fixed speeds ( 5 km/h, 10 km/h, … )
Video 3: Validation of speed calculation on test track

08.09.2014 17
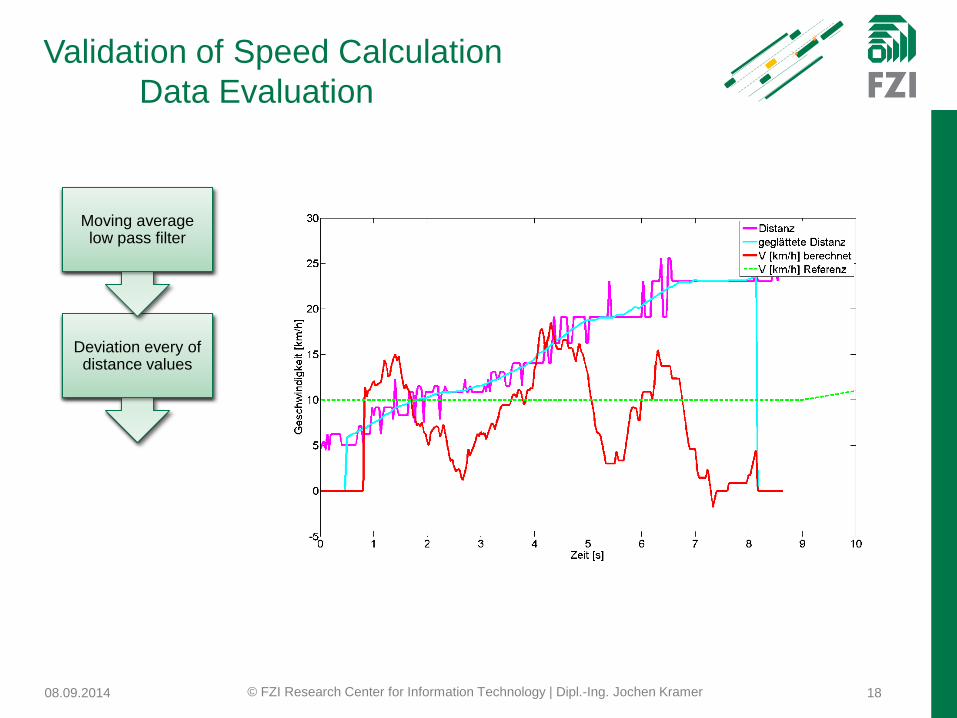
Moving average low pass filter
Validation of Speed Calculation
Data Evaluation
© FZI Research Center for Information Technology | Dipl.-Ing. Jochen Kramer
08.09.2014 18
Deviation every of distance values
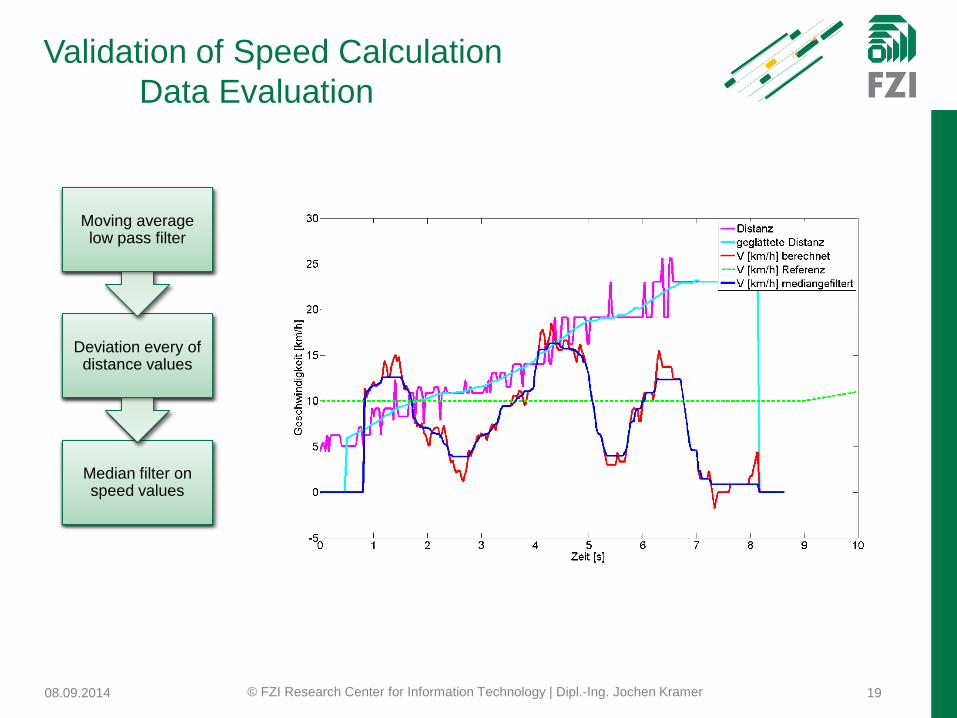
Moving average low pass filter
Validation of Speed Calculation
Data Evaluation
© FZI Research Center for Information Technology | Dipl.-Ing. Jochen Kramer
08.09.2014 19
Median filter on speed values
Deviation every of distance values
Moving average low pass filter
Validation of Speed Calculation
Data Evaluation
© FZI Research Center for Information Technology | Dipl.-Ing. Jochen Kramer

08.09.2014 20
Median filter on speed values
Deviation every of distance values
Moving average low pass filter
Validation of Speed Calculation
Data Evaluation
© FZI Research Center for Information Technology | Dipl.-Ing. Jochen Kramer
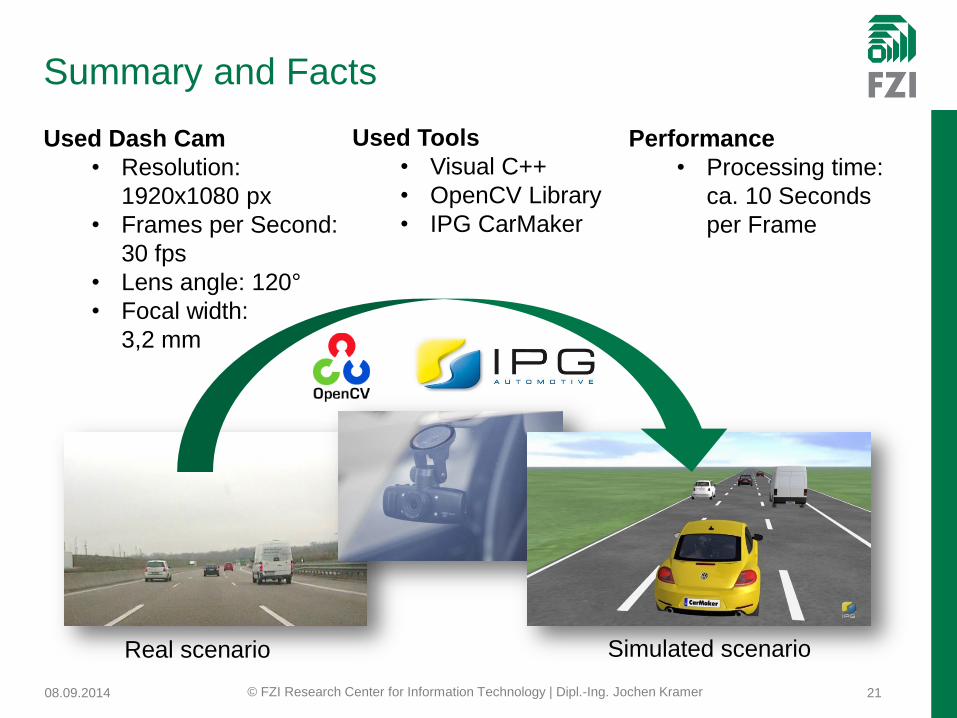
Summary and Facts
08.09.2014 21
Real scenario Simulated scenario
Used Dash Cam
• Resolution:
1920x1080 px
• Frames per Second:
30 fps
• Lens angle: 120°
• Focal width:
3,2 mm
Used Tools
• Visual C++
• OpenCV Library
• IPG CarMaker
Performance
• Processing time:
ca. 10 Seconds
per Frame
© FZI Research Center for Information Technology | Dipl.-Ing. Jochen Kramer

Actual working on
Front and Back Camera
08.09.2014
Synchronization of two camera
streams
Usage of front and back camera
to extend virtual environment
22 © FZI Research Center for Information Technology | Dipl.-Ing. Jochen Kramer
View of front camera
View of back camera

Research Project LogDaSim
08.09.2014 23
Driving Scenario
Ontology
Domain Model
Instance Model
Reactive Simulation
Environment
Tests
Adapted Log Data
Scenario Filter
Integration
Parameterized
Scenarios
Derivation use
Functional
Specification Categorization Prototypes
Data Logger
Driver Assistant System
© FZI Research Center for Information Technology | Dipl.-Ing. Jochen Kramer

Thank you for your attention!
This project is supported by