px4 seminar 03
TRANSCRIPT


Ground Control Station

QGroundControl• Main Features
• Open-source MAVLink Micro Air Vehicle Communication Protocol with lightweight serialization functions for microcontrollers
• Windows / Linux / MacOS support
• 2/3D aerial maps (Google Earth support) with drag-and-drop waypoints
• In-flight manipulation of waypoints and onboard parameters (in EEPROM)
• Real-time plotting of sensor and telemetry data
• Logging and plotting of sensor logs
• Support for UDP, serial (radio modem) and mesh networks
• Supports multiple Autopilots (pxIMU, ArduPilotMega, SLUGS, MatrixPilot/UAVDevBoard, many more)
• MAVLink protocol supports up to 255 vehicles in parallel and project-specific custom messages can be added
• Head-up-display, support for digital video transmission/display
• Competition-proven at IMAV and EMAV competitions (QGroundControl was used in the EMAV 2009 1st place Indoor Autonomy entry)

Dependency Package
• Qt5.4 and SDL1.2
• git and some essential packages for building
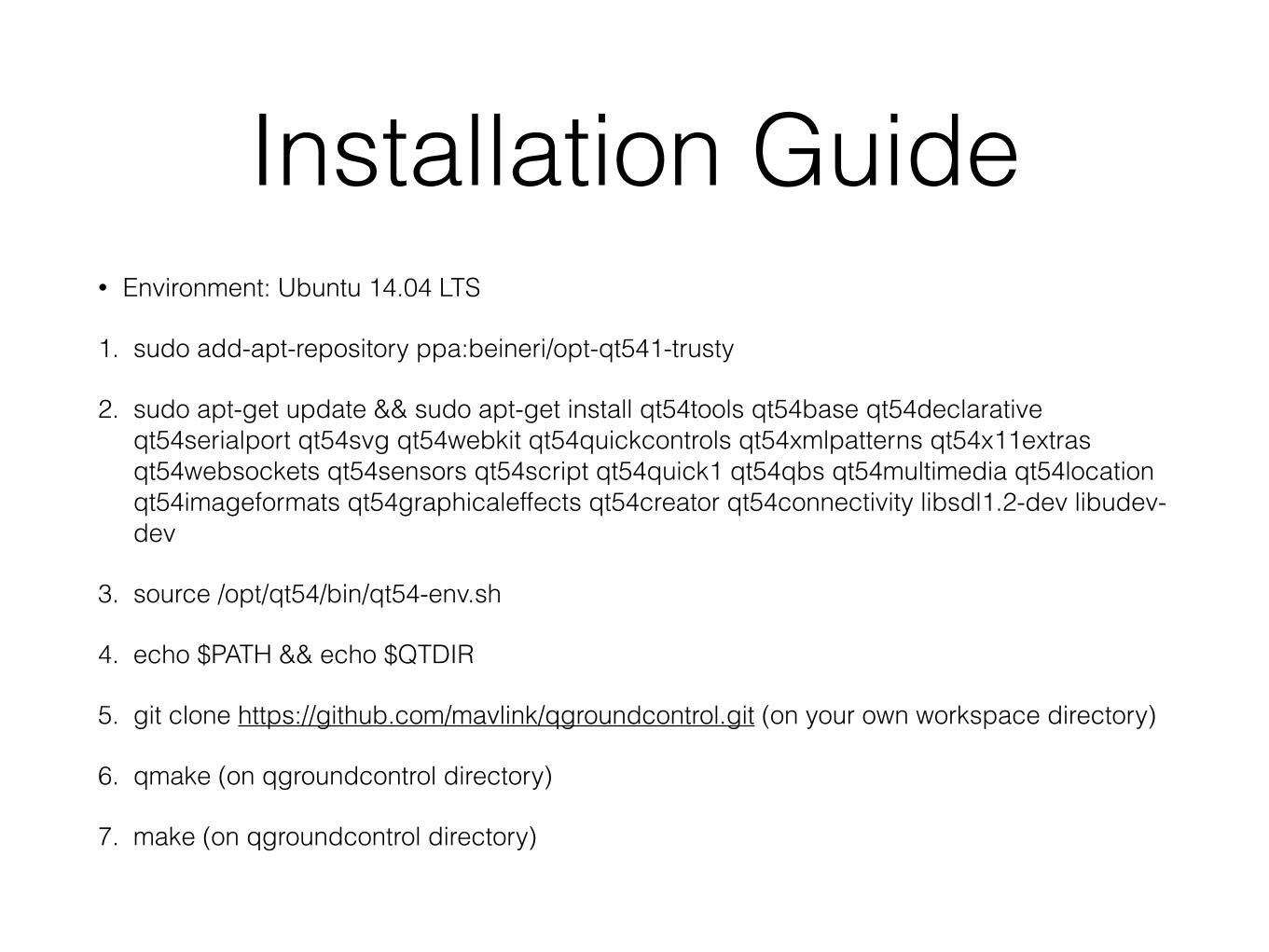
Installation Guide• Environment: Ubuntu 14.04 LTS
1. sudo add-apt-repository ppa:beineri/opt-qt541-trusty
2. sudo apt-get update && sudo apt-get install qt54tools qt54base qt54declarative qt54serialport qt54svg qt54webkit qt54quickcontrols qt54xmlpatterns qt54x11extras qt54websockets qt54sensors qt54script qt54quick1 qt54qbs qt54multimedia qt54location qt54imageformats qt54graphicaleffects qt54creator qt54connectivity libsdl1.2-dev libudev-dev
3. source /opt/qt54/bin/qt54-env.sh
4. echo $PATH && echo $QTDIR
5. git clone https://github.com/mavlink/qgroundcontrol.git (on your own workspace directory)
6. qmake (on qgroundcontrol directory)
7. make (on qgroundcontrol directory)
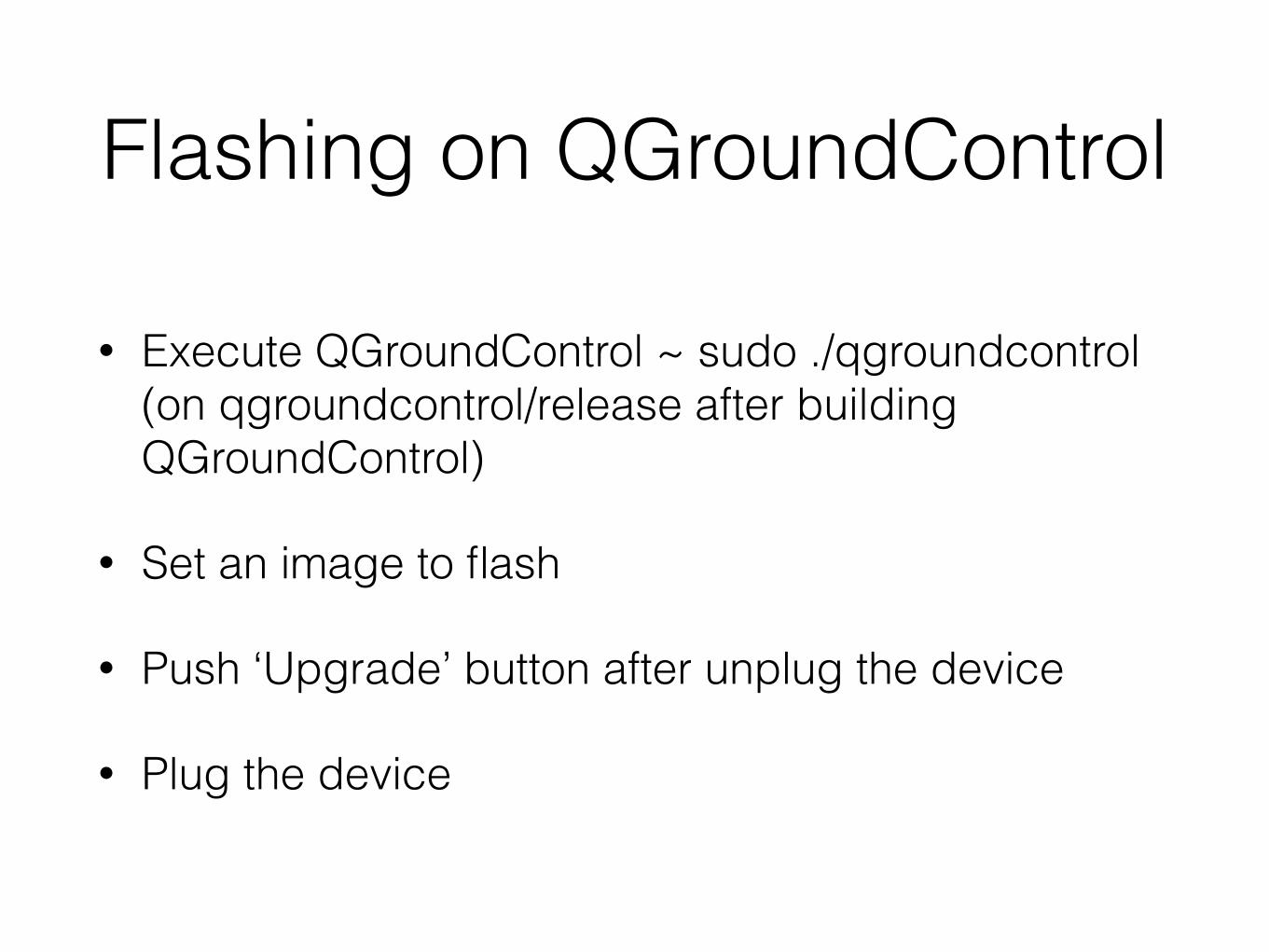
Flashing on QGroundControl
• Execute QGroundControl ~ sudo ./qgroundcontrol (on qgroundcontrol/release after building QGroundControl)
• Set an image to flash
• Push ‘Upgrade’ button after unplug the device
• Plug the device
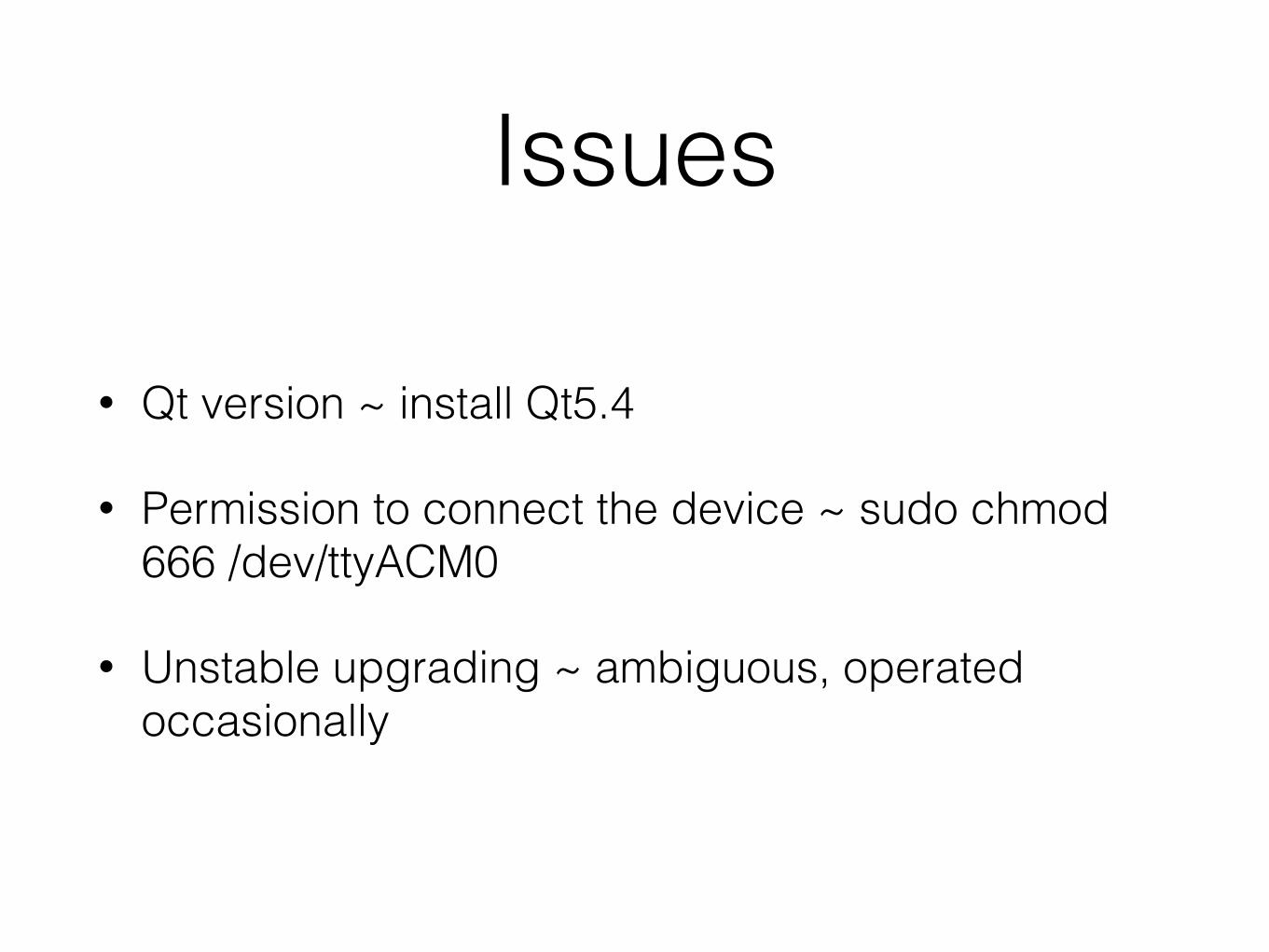
Issues
• Qt version ~ install Qt5.4
• Permission to connect the device ~ sudo chmod 666 /dev/ttyACM0
• Unstable upgrading ~ ambiguous, operated occasionally

Reference
• http://legion-ts-llc.com/uav_manufacturers.html
• http://qgroundcontrol.org
• https://github.com/mavlink/qgroundcontrol