reoptimization algorithms and persistent turing machines
TRANSCRIPT
Reoptimization Algorithms and Persistent Machines
Jhoirene B Clemente
December 2, 2014Algorithms and Complexity LabDepartment of Computer Science
University of the Philippines Diliman
33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
Introduction2 Optimization Problem
Approximation Algorithm
ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Recall: Combinatorial Optimization Problem
Definition (Combinatorial Optimization Problem[Papadimitriou and Steiglitz, 1998])An optimization problem Π = (DΠ,RΠ, costΠ, goalΠ) consists of1. A set of valid instances DΠ. Let I ∈ DΠ, denote an input
instance.2. Each I ∈ DΠ has a set of feasible solutions, RΠ(I ).3. Objective function, costΠ, that assigns a nonnegative
rational number to each pair (I ,SOL), where I is an instanceand SOL is a feasible solution to I.
4. Either minimization or maximization problem:goalΠ ∈ {min,max}.

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
3 Approximation Algorithm
ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Approximation Algorithms
Definition (Recall: Approximation Algorithm[Williamson and Shmoy, 2010] )An ρ-approximation algorithm for an optimization problem is apolynomial-time algorithm that for all instances of the problemproduces a solution whose value is within a factor of ρ of thevalue of an optimal solution.Given an problem instance I with an optimal solution Opt(I ), i.e.the cost function cost(Opt(I )) is minimum/maximum.
I An algorithm for a minimization problem is calledρ-approximative algorithm for some ρ > 1, if the algorithmobtains a maximum cost of ρ · cost(Opt(I )), for any inputinstance I .
I An algorithm for a maximization problem is calledρ-approximative algorithm, for some ρ < 1, if the algorithmobtains a minimum cost of ρ · cost(Opt(I )), for any inputinstance I .

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
3 Approximation Algorithm
ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Approximation Algorithms
Definition (Recall: Approximation Algorithm[Williamson and Shmoy, 2010] )An ρ-approximation algorithm for an optimization problem is apolynomial-time algorithm that for all instances of the problemproduces a solution whose value is within a factor of ρ of thevalue of an optimal solution.Given an problem instance I with an optimal solution Opt(I ), i.e.the cost function cost(Opt(I )) is minimum/maximum.
I An algorithm for a minimization problem is calledρ-approximative algorithm for some ρ > 1, if the algorithmobtains a maximum cost of ρ · cost(Opt(I )), for any inputinstance I .
I An algorithm for a maximization problem is calledρ-approximative algorithm, for some ρ < 1, if the algorithmobtains a minimum cost of ρ · cost(Opt(I )), for any inputinstance I .

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
3 Approximation Algorithm
ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Approximation Algorithms
Definition (Recall: Approximation Algorithm[Williamson and Shmoy, 2010] )An ρ-approximation algorithm for an optimization problem is apolynomial-time algorithm that for all instances of the problemproduces a solution whose value is within a factor of ρ of thevalue of an optimal solution.Given an problem instance I with an optimal solution Opt(I ), i.e.the cost function cost(Opt(I )) is minimum/maximum.
I An algorithm for a minimization problem is calledρ-approximative algorithm for some ρ > 1, if the algorithmobtains a maximum cost of ρ · cost(Opt(I )), for any inputinstance I .
I An algorithm for a maximization problem is calledρ-approximative algorithm, for some ρ < 1, if the algorithmobtains a minimum cost of ρ · cost(Opt(I )), for any inputinstance I .

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
4 ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Reoptimization
Don’t start from scratch when confronted with aproblem, but try to make good use of prior knowledgeabout similar problem instances whenever they areavailable.
Definition (Reoptimization (Bockenhauer, 2008) )Given a problem instance and an optimal solution for it, we are toefficiently obtain an optimal solution for a locally modifiedinstance of the problem.
INPUT: I , SOL, I ′, where (I , I ′) ∈MOUTPUT: SOL′

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
4 ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Reoptimization
Don’t start from scratch when confronted with aproblem, but try to make good use of prior knowledgeabout similar problem instances whenever they areavailable.
Definition (Reoptimization (Bockenhauer, 2008) )Given a problem instance and an optimal solution for it, we are toefficiently obtain an optimal solution for a locally modifiedinstance of the problem.
INPUT: I , SOL, I ′, where (I , I ′) ∈MOUTPUT: SOL′
33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
4 ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Reoptimization
Don’t start from scratch when confronted with aproblem, but try to make good use of prior knowledgeabout similar problem instances whenever they areavailable.
Definition (Reoptimization (Bockenhauer, 2008) )Given a problem instance and an optimal solution for it, we are toefficiently obtain an optimal solution for a locally modifiedinstance of the problem.
INPUT: I , SOL, I ′, where (I , I ′) ∈MOUTPUT: SOL′

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
4 ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Reoptimization
Don’t start from scratch when confronted with aproblem, but try to make good use of prior knowledgeabout similar problem instances whenever they areavailable.
Definition (Reoptimization (Bockenhauer, 2008) )Given a problem instance and an optimal solution for it, we are toefficiently obtain an optimal solution for a locally modifiedinstance of the problem.
INPUT: I , SOL, I ′, where (I , I ′) ∈MOUTPUT: SOL′

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
5 ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Reoptimization
Definition (Reoptimization [Zych, 2012])Let Π = (DΠ,RΠ, cost, goal) be an optimization problem andM⊆ DΠ ×DΠ be a binary relation (the modification). Thecorresponding reoptimization problem
RM(Π) = (DRM(Π),RRM(Π), costRM(Π), goalRM(Π))
consists of
1. a set of feasible instances defined as
DRM(Π) = {(I , I ′,SOL) : (I , I ′) ∈M and SOL ∈ RΠ(I )};
we refer to I as the original instance and to I ′ as themodified instance
2. a feasibility relation defined as
RRM(Π)((I , I ′,SOL)) = RΠ(I ′)
A solution to a reoptimization variant of the problem isdenoted by SOL′.

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
5 ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Reoptimization
Definition (Reoptimization [Zych, 2012])Let Π = (DΠ,RΠ, cost, goal) be an optimization problem andM⊆ DΠ ×DΠ be a binary relation (the modification). Thecorresponding reoptimization problem
RM(Π) = (DRM(Π),RRM(Π), costRM(Π), goalRM(Π))
consists of1. a set of feasible instances defined as
DRM(Π) = {(I , I ′,SOL) : (I , I ′) ∈M and SOL ∈ RΠ(I )};
we refer to I as the original instance and to I ′ as themodified instance
2. a feasibility relation defined as
RRM(Π)((I , I ′,SOL)) = RΠ(I ′)
A solution to a reoptimization variant of the problem isdenoted by SOL′.

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
5 ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Reoptimization
Definition (Reoptimization [Zych, 2012])Let Π = (DΠ,RΠ, cost, goal) be an optimization problem andM⊆ DΠ ×DΠ be a binary relation (the modification). Thecorresponding reoptimization problem
RM(Π) = (DRM(Π),RRM(Π), costRM(Π), goalRM(Π))
consists of1. a set of feasible instances defined as
DRM(Π) = {(I , I ′,SOL) : (I , I ′) ∈M and SOL ∈ RΠ(I )};
we refer to I as the original instance and to I ′ as themodified instance
2. a feasibility relation defined as
RRM(Π)((I , I ′,SOL)) = RΠ(I ′)
A solution to a reoptimization variant of the problem isdenoted by SOL′.

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
6 ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Reoptimization
1. Reoptimization can help in providing efficient algorithms toproblems involved in dynamic systems
I Shortest Path Problem [Pallottino and Scutella, 2003][Nardelli et al., 2003]
I Dynamic Minimum Spanning Tree [Thorup, 2000] with edgeweights [Ribeiro and Toso, 2007] [Cattaneo et al., 2010]
I Vehicle Routing Problem [Secomandi and Margot, 2009]I Facility Location Problem [Shachnai et al., 2012]
2. Reoptimization can help in providing a better solution or anefficient algorithm for computationally hard problems
I Traveling salesman problem [Královic and Mömke, 2007][Hans-joachim Böckenhauer, 2008] [Ausiello et al., 2011]
I Steiner tree problem [Hromkovič, 2009][?][Bilo and Zych, 2012] [Böckenhauer et al., 2012]
I Shortest common superstring [Bilo,2011] [Popov, 2013]I Hereditary problems on Graphs [Boria et al., 2012]I Scheduling Problem [Boria et al., 2012]I Pattern Matching [Yue and Tang, 2008]
[Clemente et al., 2014]

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
6 ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Reoptimization
1. Reoptimization can help in providing efficient algorithms toproblems involved in dynamic systems
I Shortest Path Problem [Pallottino and Scutella, 2003][Nardelli et al., 2003]
I Dynamic Minimum Spanning Tree [Thorup, 2000] with edgeweights [Ribeiro and Toso, 2007] [Cattaneo et al., 2010]
I Vehicle Routing Problem [Secomandi and Margot, 2009]I Facility Location Problem [Shachnai et al., 2012]
2. Reoptimization can help in providing a better solution or anefficient algorithm for computationally hard problems
I Traveling salesman problem [Královic and Mömke, 2007][Hans-joachim Böckenhauer, 2008] [Ausiello et al., 2011]
I Steiner tree problem [Hromkovič, 2009][?][Bilo and Zych, 2012] [Böckenhauer et al., 2012]
I Shortest common superstring [Bilo,2011] [Popov, 2013]I Hereditary problems on Graphs [Boria et al., 2012]I Scheduling Problem [Boria et al., 2012]I Pattern Matching [Yue and Tang, 2008]
[Clemente et al., 2014]

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
7 ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Metric TSP: with additional information

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
8 ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Metric TSP: with additional information

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
9 ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Metric TSP: with additional information

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
10 ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Metric TSP: Nearest Insert[Ausiello et al., 2009]

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
11 ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Metric TSP: Nearest Insert[Ausiello et al., 2009]

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
12 ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Metric TSP: Nearest Insert[Ausiello et al., 2009]

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
13 ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Metric TSP: Nearest Insert[Ausiello et al., 2009]
10 + 12 + 6 + 4 + 5 + 11 = 48

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
14 ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Example: Reoptimization for Metric TSP
Definition (Metric TSP)INPUT: In+1OUTPUT: Hn+1
TheoremThere is a 3/2-Approximation algorithm for solving Metric TSP.
Definition (Reoptimization Metric TSP)INPUT: In,H ∗n , In+1OUTPUT: Hn+1
Reoptimization can still improve the approximationratio.

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
14 ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Example: Reoptimization for Metric TSP
Definition (Metric TSP)INPUT: In+1OUTPUT: Hn+1
TheoremThere is a 3/2-Approximation algorithm for solving Metric TSP.
Definition (Reoptimization Metric TSP)INPUT: In,H ∗n , In+1OUTPUT: Hn+1
Reoptimization can still improve the approximationratio.

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
14 ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Example: Reoptimization for Metric TSP
Definition (Metric TSP)INPUT: In+1OUTPUT: Hn+1
TheoremThere is a 3/2-Approximation algorithm for solving Metric TSP.
Definition (Reoptimization Metric TSP)INPUT: In,H ∗n , In+1OUTPUT: Hn+1
Reoptimization can still improve the approximationratio.

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
14 ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Example: Reoptimization for Metric TSP
Definition (Metric TSP)INPUT: In+1OUTPUT: Hn+1
TheoremThere is a 3/2-Approximation algorithm for solving Metric TSP.
Definition (Reoptimization Metric TSP)INPUT: In,H ∗n , In+1OUTPUT: Hn+1
Reoptimization can still improve the approximationratio.

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
15 ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Reoptimization Solution for Metric TSP
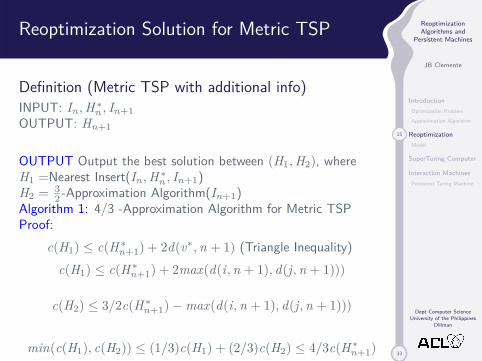
Definition (Metric TSP with additional info)INPUT: In,H ∗n , In+1OUTPUT: Hn+1
OUTPUT Output the best solution between (H1,H2), whereH1 =Nearest Insert(In,H ∗n , In+1)H2 = 3
2 -Approximation Algorithm(In+1)Algorithm 1: 4/3 -Approximation Algorithm for Metric TSP
Proof:c(H1) ≤ c(H ∗n+1) + 2d(v∗,n + 1) (Triangle Inequality)
c(H1) ≤ c(H ∗n+1) + 2max(d(i,n + 1), d(j,n + 1)))
c(H2) ≤ 3/2c(H ∗n+1)−max(d(i,n + 1), d(j,n + 1)))
min(c(H1), c(H2)) ≤ (1/3)c(H1) + (2/3)c(H2) ≤ 4/3c(H ∗n+1)

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
15 ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Reoptimization Solution for Metric TSP
Definition (Metric TSP with additional info)INPUT: In,H ∗n , In+1OUTPUT: Hn+1
OUTPUT Output the best solution between (H1,H2), whereH1 =Nearest Insert(In,H ∗n , In+1)H2 = 3
2 -Approximation Algorithm(In+1)Algorithm 1: 4/3 -Approximation Algorithm for Metric TSP
Proof:c(H1) ≤ c(H ∗n+1) + 2d(v∗,n + 1) (Triangle Inequality)
c(H1) ≤ c(H ∗n+1) + 2max(d(i,n + 1), d(j,n + 1)))
c(H2) ≤ 3/2c(H ∗n+1)−max(d(i,n + 1), d(j,n + 1)))
min(c(H1), c(H2)) ≤ (1/3)c(H1) + (2/3)c(H2) ≤ 4/3c(H ∗n+1)
33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
15 ReoptimizationModel
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Reoptimization Solution for Metric TSP
Definition (Metric TSP with additional info)INPUT: In,H ∗n , In+1OUTPUT: Hn+1
OUTPUT Output the best solution between (H1,H2), whereH1 =Nearest Insert(In,H ∗n , In+1)H2 = 3
2 -Approximation Algorithm(In+1)Algorithm 1: 4/3 -Approximation Algorithm for Metric TSPProof:
c(H1) ≤ c(H ∗n+1) + 2d(v∗,n + 1) (Triangle Inequality)c(H1) ≤ c(H ∗n+1) + 2max(d(i,n + 1), d(j,n + 1)))
c(H2) ≤ 3/2c(H ∗n+1)−max(d(i,n + 1), d(j,n + 1)))
min(c(H1), c(H2)) ≤ (1/3)c(H1) + (2/3)c(H2) ≤ 4/3c(H ∗n+1)

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
Reoptimization16 Model
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Another Model for Combinatorial Reoptimiza-tion [Shachnai et al., 2012]
Given an optimization problem Π, let I0 be an input for Π, and let
CI0 = {C 1I0,C 2
I0,C 3
I0, . . . .}
be the set of configurations corresponding to the solution space ofΠ for I0.
In R(Π), we are given C jI0∈ CI0 of an initial instance I0, and a
new instance I obtained from I0
For any i ∈ I and configuration C kI , let δ be the transition cost.
δ(i,C ji0,C k
I )
The goal of reoptimization is to find C ∗I with an optimalcost(C ∗I ) and transition cost
δ(i,C jI0,C ∗I )

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
Reoptimization16 Model
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Another Model for Combinatorial Reoptimiza-tion [Shachnai et al., 2012]
Given an optimization problem Π, let I0 be an input for Π, and let
CI0 = {C 1I0,C 2
I0,C 3
I0, . . . .}
be the set of configurations corresponding to the solution space ofΠ for I0.
In R(Π), we are given C jI0∈ CI0 of an initial instance I0, and a
new instance I obtained from I0
For any i ∈ I and configuration C kI , let δ be the transition cost.
δ(i,C ji0,C k
I )
The goal of reoptimization is to find C ∗I with an optimalcost(C ∗I ) and transition cost
δ(i,C jI0,C ∗I )

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
Reoptimization16 Model
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Another Model for Combinatorial Reoptimiza-tion [Shachnai et al., 2012]
Given an optimization problem Π, let I0 be an input for Π, and let
CI0 = {C 1I0,C 2
I0,C 3
I0, . . . .}
be the set of configurations corresponding to the solution space ofΠ for I0.
In R(Π), we are given C jI0∈ CI0 of an initial instance I0, and a
new instance I obtained from I0
For any i ∈ I and configuration C kI , let δ be the transition cost.
δ(i,C ji0,C k
I )
The goal of reoptimization is to find C ∗I with an optimalcost(C ∗I ) and transition cost
δ(i,C jI0,C ∗I )

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
Reoptimization16 Model
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Another Model for Combinatorial Reoptimiza-tion [Shachnai et al., 2012]
Given an optimization problem Π, let I0 be an input for Π, and let
CI0 = {C 1I0,C 2
I0,C 3
I0, . . . .}
be the set of configurations corresponding to the solution space ofΠ for I0.
In R(Π), we are given C jI0∈ CI0 of an initial instance I0, and a
new instance I obtained from I0
For any i ∈ I and configuration C kI , let δ be the transition cost.
δ(i,C ji0,C k
I )
The goal of reoptimization is to find C ∗I with an optimalcost(C ∗I ) and transition cost
δ(i,C jI0,C ∗I )

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
Reoptimization17 Model
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Reoptimization from an Online Environment
I = {I0, I1, I2, I3, . . . , It}
SOL = {SOL0,SOL1,SOL2,SOL3, . . . ,SOLt}

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
Reoptimization18 Model
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Online Algorithm
I Many problems such as routing, scheduling, or the pagingproblem work in so called online environments and theiralgorithmic formulation and analysis demand a model inwhich an algorithm deals with such a problem knows only apart of its input at any specific point during runtime.
I These problems are called online problems and the respectivealgorithms are called online algorithms.
I An online algorithm A has to make decisions at any timestep i without knowing what the next chunk of input at timestep i + 1 will be. Algorithm A has to produce part of thefinal output in every step, it cannot revoke decisions it hasalready made.

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
Reoptimization18 Model
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Online Algorithm
I Many problems such as routing, scheduling, or the pagingproblem work in so called online environments and theiralgorithmic formulation and analysis demand a model inwhich an algorithm deals with such a problem knows only apart of its input at any specific point during runtime.
I These problems are called online problems and the respectivealgorithms are called online algorithms.
I An online algorithm A has to make decisions at any timestep i without knowing what the next chunk of input at timestep i + 1 will be. Algorithm A has to produce part of thefinal output in every step, it cannot revoke decisions it hasalready made.
33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
Reoptimization18 Model
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Online Algorithm
I Many problems such as routing, scheduling, or the pagingproblem work in so called online environments and theiralgorithmic formulation and analysis demand a model inwhich an algorithm deals with such a problem knows only apart of its input at any specific point during runtime.
I These problems are called online problems and the respectivealgorithms are called online algorithms.
I An online algorithm A has to make decisions at any timestep i without knowing what the next chunk of input at timestep i + 1 will be. Algorithm A has to produce part of thefinal output in every step, it cannot revoke decisions it hasalready made.

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
Reoptimization18 Model
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Online Algorithm
I Many problems such as routing, scheduling, or the pagingproblem work in so called online environments and theiralgorithmic formulation and analysis demand a model inwhich an algorithm deals with such a problem knows only apart of its input at any specific point during runtime.
I These problems are called online problems and the respectivealgorithms are called online algorithms.
I An online algorithm A has to make decisions at any timestep i without knowing what the next chunk of input at timestep i + 1 will be. Algorithm A has to produce part of thefinal output in every step, it cannot revoke decisions it hasalready made.

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
Reoptimization18 Model
SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Online Algorithm
I Many problems such as routing, scheduling, or the pagingproblem work in so called online environments and theiralgorithmic formulation and analysis demand a model inwhich an algorithm deals with such a problem knows only apart of its input at any specific point during runtime.
I These problems are called online problems and the respectivealgorithms are called online algorithms.
I An online algorithm A has to make decisions at any timestep i without knowing what the next chunk of input at timestep i + 1 will be. Algorithm A has to produce part of thefinal output in every step, it cannot revoke decisions it hasalready made.

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
ReoptimizationModel
19 SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Limitations of TM
The TM is too weak to describe properly the Internet,evolution or robotics, because it is a closed model,which requires that all inputs are given in advance, andTM is allowed to use an unbounded but only finiteamount of time or memory resources [(Eberbach, 2003),(Wegner, 2003)].
In Reoptimization,
1. We expect changes in the environment.2. We assume that the initial solution (SOL0) is obtained from
the environment.3. We make use of previous configurations in solving new input
instances.Interaction Machines allow inputs to be generateddynamically and require inputs to be represented by apotentially infinite stream. [Eberbach,Wegner, 2003]

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
ReoptimizationModel
19 SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Limitations of TM
The TM is too weak to describe properly the Internet,evolution or robotics, because it is a closed model,which requires that all inputs are given in advance, andTM is allowed to use an unbounded but only finiteamount of time or memory resources [(Eberbach, 2003),(Wegner, 2003)].
In Reoptimization,
1. We expect changes in the environment.2. We assume that the initial solution (SOL0) is obtained from
the environment.3. We make use of previous configurations in solving new input
instances.Interaction Machines allow inputs to be generateddynamically and require inputs to be represented by apotentially infinite stream. [Eberbach,Wegner, 2003]

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
ReoptimizationModel
19 SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Limitations of TM
The TM is too weak to describe properly the Internet,evolution or robotics, because it is a closed model,which requires that all inputs are given in advance, andTM is allowed to use an unbounded but only finiteamount of time or memory resources [(Eberbach, 2003),(Wegner, 2003)].
In Reoptimization,1. We expect changes in the environment.
2. We assume that the initial solution (SOL0) is obtained fromthe environment.
3. We make use of previous configurations in solving new inputinstances.Interaction Machines allow inputs to be generateddynamically and require inputs to be represented by apotentially infinite stream. [Eberbach,Wegner, 2003]

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
ReoptimizationModel
19 SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Limitations of TM
The TM is too weak to describe properly the Internet,evolution or robotics, because it is a closed model,which requires that all inputs are given in advance, andTM is allowed to use an unbounded but only finiteamount of time or memory resources [(Eberbach, 2003),(Wegner, 2003)].
In Reoptimization,1. We expect changes in the environment.2. We assume that the initial solution (SOL0) is obtained from
the environment.
3. We make use of previous configurations in solving new inputinstances.Interaction Machines allow inputs to be generateddynamically and require inputs to be represented by apotentially infinite stream. [Eberbach,Wegner, 2003]

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
ReoptimizationModel
19 SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Limitations of TM
The TM is too weak to describe properly the Internet,evolution or robotics, because it is a closed model,which requires that all inputs are given in advance, andTM is allowed to use an unbounded but only finiteamount of time or memory resources [(Eberbach, 2003),(Wegner, 2003)].
In Reoptimization,1. We expect changes in the environment.2. We assume that the initial solution (SOL0) is obtained from
the environment.3. We make use of previous configurations in solving new input
instances.
Interaction Machines allow inputs to be generateddynamically and require inputs to be represented by apotentially infinite stream. [Eberbach,Wegner, 2003]

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
ReoptimizationModel
19 SuperTuring Computer
Interaction MachinesPersistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Limitations of TM
The TM is too weak to describe properly the Internet,evolution or robotics, because it is a closed model,which requires that all inputs are given in advance, andTM is allowed to use an unbounded but only finiteamount of time or memory resources [(Eberbach, 2003),(Wegner, 2003)].
In Reoptimization,1. We expect changes in the environment.2. We assume that the initial solution (SOL0) is obtained from
the environment.3. We make use of previous configurations in solving new input
instances.Interaction Machines allow inputs to be generateddynamically and require inputs to be represented by apotentially infinite stream. [Eberbach,Wegner, 2003]

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
ReoptimizationModel
SuperTuring Computer
Interaction Machines20 Persistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Persistent Turing Machines
The canonical model of interaction machinesI minimal extension of Turing Machines (TMs) that express
interactive behavior.
I reactive systemI multitape machine with a persistent worktape preserved
between interactionsI inputs and outputs are dynamically generated streams of
strings.

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
ReoptimizationModel
SuperTuring Computer
Interaction Machines20 Persistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Persistent Turing Machines
The canonical model of interaction machinesI minimal extension of Turing Machines (TMs) that express
interactive behavior.I reactive system
I multitape machine with a persistent worktape preservedbetween interactions
I inputs and outputs are dynamically generated streams ofstrings.

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
ReoptimizationModel
SuperTuring Computer
Interaction Machines20 Persistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Persistent Turing Machines
The canonical model of interaction machinesI minimal extension of Turing Machines (TMs) that express
interactive behavior.I reactive systemI multitape machine with a persistent worktape preserved
between interactions
I inputs and outputs are dynamically generated streams ofstrings.

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
ReoptimizationModel
SuperTuring Computer
Interaction Machines20 Persistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Persistent Turing Machines
The canonical model of interaction machinesI minimal extension of Turing Machines (TMs) that express
interactive behavior.I reactive systemI multitape machine with a persistent worktape preserved
between interactionsI inputs and outputs are dynamically generated streams of
strings.

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
ReoptimizationModel
SuperTuring Computer
Interaction Machines21 Persistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
PTM: Definition
I PTM states are not to be confused with TM states. Unlikefor TMs,the set of PTM states is infinite, represented bystrings of unbounded length.
I Since the worktape (state) at the beginning of a PTMcomputation step is not always the same, the output of aPTM M at the end of the computation step depends both onthe input and on the worktape.
fM : I ×W → O ×W
33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
ReoptimizationModel
SuperTuring Computer
Interaction Machines21 Persistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
PTM: Definition
I PTM states are not to be confused with TM states. Unlikefor TMs,the set of PTM states is infinite, represented bystrings of unbounded length.
I Since the worktape (state) at the beginning of a PTMcomputation step is not always the same, the output of aPTM M at the end of the computation step depends both onthe input and on the worktape.
fM : I ×W → O ×W

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
ReoptimizationModel
SuperTuring Computer
Interaction Machines22 Persistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
PTM: Example

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
ReoptimizationModel
SuperTuring Computer
Interaction Machines23 Persistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
PTM: Example

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
ReoptimizationModel
SuperTuring Computer
Interaction Machines24 Persistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
PTM: Computation
I Input streams are generated by the environment.
I The streams have dynamic evaluation semantics, where thenext value is not generated until the previous one isconsumed.

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
ReoptimizationModel
SuperTuring Computer
Interaction Machines24 Persistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
PTM: Computation
I Input streams are generated by the environment.I The streams have dynamic evaluation semantics, where the
next value is not generated until the previous one isconsumed.

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
ReoptimizationModel
SuperTuring Computer
Interaction Machines25 Persistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
PTM: Interaction

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
ReoptimizationModel
SuperTuring Computer
Interaction Machines26 Persistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
PTM: Interaction

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
ReoptimizationModel
SuperTuring Computer
Interaction Machines27 Persistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
Thank you for listening.

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
ReoptimizationModel
SuperTuring Computer
Interaction Machines28 Persistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
References
Ausiello, G., Bonifaci, V., and Escoffier, B. (2011).Complexity and approximation in reoptimization.In Computability in Context: Computation and Logic in the RealWorld, volume 2, pages 101–129.
Ausiello, G., Escoffier, B., Monnot, J., and Paschos, V. (2009).Reoptimization of minimum and maximum traveling salesman’stours.Journal of Discrete Algorithms, 7(4):453–463.
Bilo, D. and Zych, A. (2012).New Advances in Reoptimizing the Minimum Steiner TreeProblem.Lecture Notes in Computer Science, Mathematical Foundationsof Computer Science, 7464:184–197.

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
ReoptimizationModel
SuperTuring Computer
Interaction Machines29 Persistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
References (cont.)
Böckenhauer, H.-J., Freiermuth, K., Hromkovič, J., Mömke, T.,Sprock, A., and Steffen, B. (2012).Steiner tree reoptimization in graphs with sharpened triangleinequality.Journal of Discrete Algorithms, 11:73–86.
Boria, N., Monnot, J., and Paschos, V. T. (2012).Reoptimization of the Maximum Weighted Pk-Free SubgraphProblem under Vertex Insertion.pages 76–87.
Cattaneo, G., Faruolo, P., Petrillo, U. F., and Italiano, G.(2010).Maintaining dynamic minimum spanning trees: An experimentalstudy.Discrete Applied Mathematics, 158(5):404–425.

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
ReoptimizationModel
SuperTuring Computer
Interaction Machines30 Persistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
References (cont.)
Clemente, J., Aborot, J., and Adorna, H. (2014).Reoptimization of Motif Finding Problem.Proceedings of the International MultiConference of Engineersand Computer Scientists, I.
Hans-joachim Böckenhauer, J. H. T. M. P. W. (2008).On the hardness of reoptimization.In Proc. of the 34th International Conference on Current Trendsin Theory and Practice of Computer Science (SOFSEM 2008),LNCS, 4910.Hromkovič, J. (2009).Algorithmic adventures: from knowledge to magic.
Královic, R. and Mömke, T. (2007).Approximation Hardness of the Traveling SalesmanReoptimization Problem.MEMICS 2007, 293.

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
ReoptimizationModel
SuperTuring Computer
Interaction Machines31 Persistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
References (cont.)
Nardelli, E., Proietti, G., and Widmayer, P. (2003).Swapping a Failing Edge of a Single Source Shortest Paths TreeIs Good and Fast.Algorithmica, pages 56–74.
Pallottino, S. and Scutella, M. (2003).A new algorithm for reoptimizing shortest paths when the arccosts change.Operations Research Letters.
Papadimitriou, C. and Steiglitz, K. (1998).Combinatorial optimization: algorithms and complexity.
Popov, V. (2013).On Reoptimization of the Shortest Common SuperstringProblem.Applied Mathematical Sciences, 7(24):1195–1197.

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
ReoptimizationModel
SuperTuring Computer
Interaction Machines32 Persistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
References (cont.)
Ribeiro, C. and Toso, R. (2007).Experimental analysis of algorithms for updating minimumspanning trees on graphs subject to changes on edge weights.Experimental Algorithms.
Secomandi, N. and Margot, F. (2009).Reoptimization approaches for the vehicle-routing problem withstochastic demands.Operations Research, 57:1–11.
Shachnai, H., Tamir, G., and Tamir, T. (2012).A Theory and Algorithms for Combinatorial Reoptimization.Lecture Notes in Computer Science, 7256(1574):618–630.
Thorup, M. (2000).Dynamic Graph Algorithms with Applications.Proceedings of the 7th Scandinavian Workshop on AlgorithmTheory, pages 1–9.

33
ReoptimizationAlgorithms and
Persistent Machines
JB Clemente
IntroductionOptimization Problem
Approximation Algorithm
ReoptimizationModel
SuperTuring Computer
Interaction Machines33 Persistent Turing Machine
Dept Computer ScienceUniversity of the Philippines
Diliman
References (cont.)
Williamson, D. and Shmoy, D. (2010).The Design of Approximation Algorithms.
Yue, F. and Tang, J. (2008).A new approach for tree alignment based on localre-optimization.In International Conference on BioMedical Engineering andInformatics, BMEI 2008.Zych, A. (2012).Reoptimization of NP-hard Problems.PhD thesis, ETH Zurich.