rescue robot based on embedded and rov
TRANSCRIPT

RESCUE ROBOT
Siddharth Bhatt
Kratika Nagar
Jyoti Shinde
N.B.Hulle
PRESENTATION ON

CONTENTS
I. Introduction
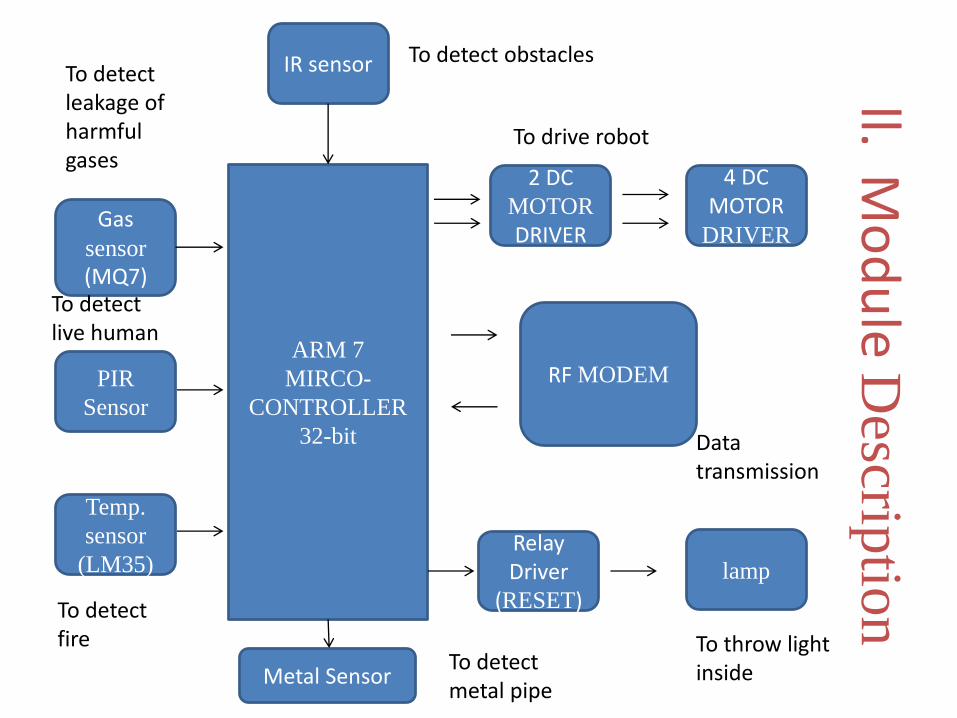
II. Module Description
III. Methodology
IV.Our Contribution
V. Conclusion
VI.References

I. INTRODUCTION
• The basic aim is to design a cost effective Robot to work effortlessly
in critical circumstances.
• The goal of the RESCUE ROBOT basically a USAR(URBAN
SEARCH AND RESCUE) is to search the traces of the alive human
body where people are not able to reach.
• The important objective that are associated in using of Robotic
system in Rescue operation are:
1) Saving of manpower.
2) Improve the accuracy.
3) Ability to work in a hazardous environment.

• There is a 3D LAW which is followed by USAR robot.
where 3D’s are :
a. DIRTY
b. DANGEROUS
c. DULL TASKS
They can do what rescuers and rescue dogs do it.
EXAMPLE of USAR is DRDO DAKSH:
• Daksh is a battery-operated remote-controlled
robot on wheels and its primary role is to
recover bombs.
• It can climb staircases, negotiate steep slopes,
navigate narrow corridors and tow vehicles to
reach hazardous materials.
• Using its robotized arm, it can lift a suspect
object and scan it using its portable X-Ray
device.
• If the object is a bomb, Daksh can defuse it
with its water jet disrupter. It has a shotgun,
which can break open locked doors, and it can
scan cars for explosives.

DAKSH IMPROVISATION
• The newer version of Daksh is made of aluminum alloy as against the older version.
• The use of new material has not just reduced the weight but has also made it more rugged.
• To improve speed the new Daksh has used custom-made motors that can increased the speed by three times.
• The new Daksh has been integrated with DRDO’s Unmanned Areal Vehicle (UAV) Netra, and the integrated system is being called CBRN Remotely Operated Platform (ROP).
• In case of a radiation hazard, the radiation detection unit fitted on Netra can be flown to the affected area. Netra model being used for this platform has an increased range of four kilometers and double the flying time.
• This system will not just be useful for the armed forces, but also the paramilitary forces operating in areas where the nature of conflict is different. There will be demand for this version of Daksh from the different security agencies.
• The Faster, lighter version of the ROV along with added advantage also has enhanced capabilities that will be certainly useful in the backdrop of changing nature of warfare in insurgency affected areas, especially with increased threat of dirty bombs, which use radioactive material.

Benefits of USAR
• They can do what rescuers or rescue dogs can't!
a. voids smaller than person can enter
b. voids on fire or oxygen depleted
lose 0.5 congitive attention with each level of protection.

19.4
42.2
5.6
1.1 0.7 0.31.9
9.9 9.7
2.2 3 4
30min 1 day 2 days 3days 4days 5days
Survival Rate
% rescued survived % rescued dead
% o
f re
scu
ed
• NOT ENOUGH TRAINED PEOPLE
a. 1 survivor, entombed : 10 rescuers, 4 hours
b. 1 survivor, trapped/crushed : 10 rescuers, 10hours
135 rescuers died Mexico City , 65 in confined spaces.
• Time is very critical
setup time ~1.5min
Time

Robots compared with SearchCams
Price : ~$10k
Operational range
setup time < 1.5min
Dogs at rescue sites• injured by sharp metal
• smell only 0.3m due to humidity etc
• lack of circulating air
Price: ~$12k
Operational range <30m
Setup time<1.5min
II.ll. M
od
ule
Descrip
tion
ARM 7
MIRCO-
CONTROLLER
32-bit
Gas sensor
(MQ7)
PIR
Sensor
Temp.
sensor
(LM35)
IR sensor
2 DC MOTOR
DRIVER
4 DC MOTOR
DRIVER
RF MODEM
RelayDriver
(RESET)lamp
To detect obstacles To detect leakage of harmful gases
To detect live human
To detect fire
Data transmission
To drive robot
To throw light inside Metal Sensor
To detect metal pipe

REMOTE PC
ANDROID IP CAM
Or
REMOTE PC
LINE
DRIVER
RF
MODEM
Receiver side
Navigation using GUI
Data transmission

III. Methodology
OUR SYSTEM(ROBO)
Remote pc
Receiver and transmitter
ALIVE HUMAN DETECTED
Searching
ACKNOWLEDGEMENT

1. Robot control
Understand how a remote operator tracks, monitor and directs a
semi autonomous robot to accomplish a task.
2. Sensory information and decision making
Understand what information a rescue robots needs from the debris and
its priority.
3. Environment
Understand the physical and environmental limitations placed on a
rescue robots ability to use an electronic device.
Focus

IV. Our Contribution
• We have incorporated a camera module that captures
the location and condition of alive human body.
Hence enhanced monitoring.
• Reliability of our robot is enhanced by integrating 5
sensors in a single robot.
• Control of robot is done by using GUI. Hence easy
controllability.

V. Conclusion
• The unmanned robot is designed that efficiently using
ARM based controller to give maximum out of it.
• Sensors provide details which help unskilled
operators for easy understability.
• Increase in Survival rate after the use of such robots.
Being more helpful to mankind.

VI. References
• T. B. Bhondve, P. R. Satyanarayan, and P. M. Mukhedkar, “Mobile Rescue
Robot for Human Body Detection in Rescue Operation of Disaster,” Int. J.
Adv. Res. Electr. Electron. Instrum. Eng., vol. 3, no. 6, pp. 9876–9882,
2014.
• R. Joshi, P. C. Poudel, and P. Bhandari, “An Embedded Autonomous
Robotic System for Alive Human Body Detection and Rescue Operation,”
Int. J. Sci. Res. Publ., vol. 4, no. 5, pp. 1–4, 2014.
• S. Chakkath, S. Hariharansiddharath, and B. Hemalatha, “Mobile Robot in
Coal Mine Disaster Surveillance,” J. Eng., vol. 2, no. 10, pp. 77–82, 2012.

QUESTIONS ?

THANKYOU !!