research article autopilot design method for the...
TRANSCRIPT

Research ArticleAutopilot Design Method for the Blended MissileBased on Model Predictive Control
Baoqing Yang and Yuyu Zhao
Control and Simulation Center Harbin Institute of Technology Harbin 150001 China
Correspondence should be addressed to Baoqing Yang ybqhiteducn
Received 19 September 2014 Revised 24 January 2015 Accepted 26 January 2015
Academic Editor Mahmut Reyhanoglu
Copyright copy 2015 B Yang and Y ZhaoThis is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
This paper develops a novel autopilot designmethod for blendedmissiles with aerodynamic control surfaces and lateral jets Firstlythe nonlinear model of blended missiles is reduced into a piecewise affine (PWA)model according to the aerodynamics propertiesSecondly based on the equivalence between the PWA model and mixed logical dynamical (MLD) model the MLD model ofblended missiles is proposed taking into account the on-off constraints of lateral pulse jets Thirdly a hybrid model predictivecontrol (MPC)method is employed to design autopilot Finally simulation results under different conditions are presented to showthe effectiveness of the proposed method which demonstrate that control allocation between aerodynamic control surfaces andlateral jets is realized by adjusting the weighting matrix in an index function
1 Introduction
The emergence of highly maneuverable targets has broughtnew challenges to guidance technology The improvementof homing guidance performance against highly maneu-verable targets in the future guided missiles requires thecontrol system to have faster response and wider operationrange [1] In the meantime as an important property ofadvanced missiles multiple actuators are often employed toenhance maneuverability as well as interception probabilityFor example both aerodynamic surfaces and reaction jets areemployed in the control system of PAC-3
With a higher angle of attack the missile dynamic modelis highly nonlinear and the coupling effects [2] as well as theuncertainties in both aerodynamic parameters and reactionjet thrust are oblivious Munson and Garbrick introducedamplification factors to describe the lateral jet interferenceeffect [3] Graham and Weinacht studied the interactionbetween the side jet and the external flow by a numericalmethod [4] It is obvious that the autopilot designed using thelinearized model around an operation point is usually unableto achieve satisfactory performance over a full flight envelopeRecently many nonlinear control methods are proposed forthe design of conventional aerofin autopilots For instance
the gain-scheduled approach was proposed in [5] wherelinear parameter varying transformations were adopted
On the other hand the autopilot design for blendedmissile has not been much reported which is more com-plicated than that of conventional aerofin autopilot due tothe heterogeneous actuation [1] Hirokawa et al [1] designedan autopilot for the case with aerodynamic surfaces andreaction jet using the coefficient diagram method (CDM)The feasibility of the autopilot based on variable structurewas discussed in [6] where a simple blending strategy isinvestigated aerodynamic control is used at low angles ofattack while reaction jet control is used when the missilemoves beyond the stall region Optimal control and staticcontrol allocation were combined in [7] to address the issueof dual control missile while a dynamic control allocationmethod was presented in [8]
In addition for the autopilot design of blended missiles(such as PAC-3) two aspects of control input constraintsshould be taken into account the saturation constraint onaerodynamic surfaces and the finite set constraint on reactionjets However they are not simultaneously considered inthe aforementioned work Besides the hybrid properties ofcontrol inputs (continuous aerodynamic surfaces and on-offreaction jets) are often neglected as in [6ndash8] Motivated by
Hindawi Publishing CorporationInternational Journal of Aerospace EngineeringVolume 2015 Article ID 718036 13 pageshttpdxdoiorg1011552015718036
2 International Journal of Aerospace Engineering
these facts this paper attempts to design an autopilot usingexplicit hybrid MPC for blended missiles by noting thatMPC is a promising methodology for the control problem ofconstrained uncertain systems [9] and that the computationalburden of on-line optimization is effectively reduced by usingexplicit MPC instead of traditional MPC [10]
The remainder of this paper is as follows Section 2gives a mathematical model of blended missile including theconfiguration of reaction jets In Section 3 the piecewiseaffine model of blended missile is established followed by anMLD model which is obtained based on the equivalence ofpiecewise affine model and mixed logical dynamical modelIn Section 4 a hybrid MPC based method for autopilotdesign is proposed and an explicit control law is constructedIn Section 5 the effectiveness of the proposed methodis verified by simulation cases under different conditionsFinally several concluding remarks are given in Section 6
2 Mathematical Model of the Missile
The plane reference coordinate system 119874119880119881119882 the bodycoordinate system 119874119909119887119910119887119911119887 the trajectory coordinate sys-tem 119874119909119908119910119908119911119908 and velocity coordinate system 119874119909V119910V119911V areinvolved in this paper Figure 1 shows a missile with some keyvariables and identified axes The axes 119911119908 119911V are not givenwhose directions can be determined by the right hand rule
21 Missile Dynamic Model Thenonlinear motion equationsare given by
119898 = 119875 cos120572 cos120573 minus 119883119886 minus 119898119892 sin 120579 + 119865119886
119909119908
119898119881 120579 = 119875 (sin120572 cos 120574V + cos120572 sin120573 sin 120574V) + 119884119886 cos 120574V
minus 119898119892 cos 120579 + 119865119886
119910119908
119898119881 cos 120579V = minus 119875 (sin120572 sin 120574V minus cos120572 sin120573 cos 120574V)
minus 119884119886 sin 120574V minus 119885119886 cos 120574V minus 119865119886
119911119908
(1)
119869119909 = (119869119910 minus 119869119911) 119903119902 + 119872119909
119869119910 119902 = (119869119911 minus 119869119909) 119901119903 + 119872119910
119869119911 119903 = (119869119909 minus 119869119910) 119901119902 + 119872119911
(2)
where 119865119886
119909119908
119865119886
119910119908
119865119886
119911119908
are lateral forces in the 119909 119910 and 119911
directions of trajectory coordinate system respectively Forsimplicity we suppose that the body is symmetric about the119909-axis that is 119869119909119910 = 119869119910119911 = 119869119911119909 = 0 In (2) each of themoments119872119909119872119910 and119872119911 contains two components that are generatedby aerodynamic surface and the lateral pulse jets respectively
119872119909 = 119872119890119909 + 119872119886
119909119887
119872119910 = 119872119890119910 + 119872119886
119910119887
119872119911 = 119872119890119911 + 119872119886
119911119887
(3)
yw
y
V(yb)
q
120574 xw(x)
120573120572
120579O
r
W(zb)
Jets
U(xb)
120595 p
Figure 1 Key coordinate systems
where 119872119890119909 119872119890119910 and 119872119890119911 denote aerodynamic momentcomponents and 119872
119886
119909119887
119872119886119910119887
and 119872119886
119911119887
are pulse jet momentcomponents
22 Lateral Jet Forces and Moments Model As shown inFigure 1 the lateral jet force is generated by 180 pulse jetslocated in front of the center of mass of PAC-3 These jets aredivided into 10 rings and arranged in staggered positions (18pulse jets are included in each ring) In each ring these jetsare uniformly distributed and the central angle between twoneighboring jets is 20 degree Use 119894 (119894 = 1 2 10) and 119895
(119895 = 1 2 18) to denote the ringrsquos label and the jetrsquos labelin each ring respectivelyThe distance between ring 119894 and thecenter ofmass is denoted by 119897119894 while spacing of adjacent ringsis Δ119897 The layout scheme of pulse jets is shown in Figures 2and 3 Assume the force generated by each individual jet isa constant 119865119898 In body coordinate system the lateral forcegenerated by the (119894 119895) pulse jet is given by
[[
[
119865119894119895
119909119887
119865119894119895
119910119887
119865119894119895
119911119887
]]
]
=
[[[[[
[
0
119865119898 cos(2119895 minus 119894lowast
18120587)
minus119865119898 sin(2119895 minus 119894lowast
18120587)
]]]]]
]
(4)
The corresponding moment is given by
[[
[
119872119894119895
119909119887
119872119894119895
119910119887
119872119894119895
119911119887
]]
]
=
[[[[[
[
0
119865119898119897119894 sin(2119895 minus 119894lowast
18120587)
119865119898119897119894 cos(2119895 minus 119894lowast
18120587)
]]]]]
]
(5)
International Journal of Aerospace Engineering 3
12
3
4
5
6
7
8
910
11
12
13
14
15
16
17
18
yb
zb
(a) Odd-numbered rings
1
2
3
4
5
6
7
8
91011
12
13
14
15
16
17
18
yb
zb
(b) Even-numbered rings
Figure 2 The layout scheme of lateral pulse jets
where
119894lowast= 2 119894 is odd
119894lowast= 1 119894 is even
(6)
For the situation where all pulse jets are fired at the sametime the total force and moment are given by
[
[
119865119909119887
119865119910119887
119865119911119887
]
]
=
[[[[[[[[[[
[
0
119894=10
sum
119894=1
119895=18
sum
119895=1
119865119894119895
119910119887
119894=10
sum
119894=1
119895=18
sum
119895=1
119865119894119895
119911119887
]]]]]]]]]]
]
[
[
119872119909119887
119872119910119887
119872119911119887
]
]
=
[[[[[[[[[[
[
0
minus
119894=10
sum
119894=1
119895=18
sum
119895=1
119865119894119895
119911119887
119897119894
119894=10
sum
119894=1
119895=18
sum
119895=1
119865119894119895
119910119887
119897119894
]]]]]]]]]]
]
(7)
In order to avoid the coupling between the pitch momentand yaw moment each ring is divided into four controlregions positive pitch negative pitch positive yaw andnegative yaw control region as shown in Figure 4
The autopilot design of PAC-3 is more complicated thanthat of other conventional missiles which are controlled
12
88
99
1010
1111
1212
xb
zb
i
lil1
Δl
middot middot middotmiddot middot middot
O
Figure 3 The ring frames expansion of lateral pulse jets
only by aerodynamic surfaces due to the hybrid propertyof control inputs and the on-off property of pulse jet (thepulse jet can be fired only one time) To deal with thisproblem the work [7] proposed two-step design procedures(1) in the first step neglect the hybrid property (or on-offproperty) and design the expected force andmoment signals(2) in the other step the fire logic is derived by solving theretaliation problem of these signals with taking into accountthe hybrid property (or on-off property) Different fromthe above traditional procedures a novel procedure will bepresented in what follows where only one step is included Inpractical applications only a small number of jets (in a certainof rings) are activated over a finite time interval To make theidea of the following development clear we here consider asimple but representative situation where no more than two
4 International Journal of Aerospace Engineering
yb
zb
Negative pitchcontrol region
Negative yawcontrol region
Positive pitchcontrol region
Positive yawcontrol region
17
8
910
11
12
12
3
4
5
6
713
14
15
16
18
(a) Odd-numbered rings
1
2
3
4
5
6
7
8
910
11
12
13
14
15
16
17
18
yb
zb
Negative pitchcontrol region
Negative yawcontrol region
Positive pitchcontrol region
Positive yawcontrol region
(b) Even-numbered rings
Figure 4 Schematic of control regions
rings are allowed to be fired simultaneously and no morethan two jets are activated in each fired ring Meanwhile itshould be ensured that only odd rings or even rings are firedand the jets are fired symmetrically about the correspondingsymmetry axis of each control region
Take the positive pitch control region as an example Theforces provided by the jets (119894 1) (119894 2) (119894 3) (119894 17) and (119894 18)
in an odd ring are given by
119865119900 = [119865119898 119865119898 cos120587
9119865119898 cos
2120587
9119865119898 cos
2120587
9119865119898 cos
120587
9]
119879
(8)
Similarly the forces provided by the jets (119894 1) (119894 2) (119894 17)and (119894 18) in an even ring are given by
119865119890 = [119865119898 cos120587
18119865119898 cos
120587
6119865119898 cos
120587
6119865119898 cos
120587
18]
119879
(9)
where119865119900 and119865119890 denote the forces associated with an odd ringand an even ring respectively
Use 119865119894 to denote the lateral force generated by ring 119894
Clearly 119865119894 should satisfy the condition
1198651= 1198659 119865
3= 1198657 119865
2= 11986510 119865
4= 1198658 (10)
When odd ring is fired the lateral force and moment aregiven by
119865119910119887
isin 119865119898 2119865119898 cos120587
9 2119865119898 cos
2120587
9 2119865119898 4119865119898 cos
120587
9
4119865119898 cos2120587
9
119872119911119887
isin 1198651198981198975 21198651198981198975 cos120587
9 21198651198981198975 cos
2120587
9 21198651198981198975
41198651198981198975 cos120587
9 41198651198981198975 cos
2120587
9
(11)
While even ring is fired the lateral force and moment aregiven by
119865119910119887
isin 2119865119898 cos120587
18 2119865119898 cos
120587
6 4119865119898 cos
120587
18 4119865119898 cos
120587
6
119872119911119887
isin 21198651198981198976 cos120587
18 21198651198981198976 cos
120587
6 41198651198981198976 cos
120587
18
41198651198981198976 cos120587
6
(12)
Noting Δ119897 is quite small we consider 1198975 ≃ 1198976 = 119897 Inorder to ensure that the jets fire efficiency the jets resultingin small moment components along 119911119887 axis are not activatedAs a result the sets of forces and moments are respectivelygiven by
119880119910+
119865= 119865119898 2119865119898 cos
120587
9 2119865119898 cos
120587
18 2119865119898 4119865119898 cos
120587
9
4119865119898 cos120587
18
(13)
119880119910+
119872= 119865119898119897 2119865119898119897 cos
120587
9 2119865119898119897 cos
120587
18 2119865119898119897 4119865119898119897 cos
120587
9
4119865119898119897 cos120587
18
(14)
where 119865119910119887
isin 119880119910+
119865and119872119911
119887
isin 119880119910+
119872 During each control period
a control moment belonging to119880119910+
119872will be used as the input
The mutual interference between high-speed jet streamand air leads to lateral jet interference effect In orderto take into account this interference force and moment
International Journal of Aerospace Engineering 5
amplification factors 119870119865119910
119870119865119911
119870119872119910
and 119870119872119911
are introducedas in [3 4]Then the resulting lateral forces andmoments are
[[[
[
119865119886
119909119887
119865119886
119910119887
119865119886
119911119887
]]]
]
= [
[
0
119865119910119887
+ 119870119865119910
119865119910119887
119865119911119887
+ 119870119865119911
119865119911119887
]
]
[[[
[
119872119886
119909119887
119872119886
119910119887
119872119886
119911119887
]]]
]
= [
[
0
119872119910119887
+ 119870119872119910
119872119910119887
119872119911119887
+ 119870119872119911
119872119911119887
]
]
(15)
Remark 1 In fact each pulse jet can be fired only once so thelocation of the fired jet cannot provide force anymore Basedon this precondition elements of sets 119880
119910+
119865and 119880
119910+
119872will be
less and less over time In this paper quantity change of setsrsquoelements is not considered to simplify the problem
23 Attitude Control Model Some transformation and sim-plification are applied to themissile model for control designIt is assumed that themissilersquosmass is of a constant valueNotethat the goal is to establish the angle of attack and sideslipangle The attitude control model is given by
= 119903 + 119902 sin120572 tan120573 minus
119876119878 (119862120572
119910120572 + 119862
120575119911
119910120575119911) cos120572
119898119881 cos120573
minus
(119865119910119887
+ 119870119865119910
119865119910119887
) cos120572
119898119881 cos120573minus
119866119910 cos120572119898119881 cos120573
120573 = 119902 cos120572 +
(119876119878 (119862120573
119911120573 + 119862
120575119910
119911 120575119910) + 119865119911119887
+ 119870119865119911
119865119911119887
) cos120573
119898119881
+
(119876119878 (119862120572
119910120572 + 119862
120575119911
119910120575119911) + 119865119910
119887
+ 119870119865119910
119865119910119887
) sin120572 sin120573
119898119881
+119866119911 cos120573
119898119881+
119866119910 sin120572 sin120573
119898119881
119902 =119872119910119887
119869119910
+
119870119872119910
119872119910119887
119869119910
+
119876119878119871119898120573
119910120573
119869119910
+119876119878119871119898
120575119910
119910 120575119910
119869119910
+
119876119878119871119898119902
119910119902
119869119910
119903 =119872119911119887
119869119911
+119870119872119911
119872119911119887
119869119911
+119876119878119871119898
120572
119911120572
119869119911
+119876119878119871119898
120575119911
119911120575119911
119869119911
+119876119878119871119898
119903
119911119903
119869119911
(16)
where 119898120573
119910 119898120575119911
119910 119898119902
119910 119898120572
119911 119898120575119911
119911 and 119898
119903
119911are aerodynamic
parameters
3 Mixed Logical Dynamical Model ofBlended Missile
31 Piecewise Affine Model of Blended Missile To simplifyanalysis the gravity term and the channel coupling term are
Table 1 Missilersquos overall parameters
Missilersquos takeoff mass [kg] 255Missilersquos full-length [m] 486Missilersquos diameter [m] 0317Distance between missile head and center ofmass [m] 2569
Moment of inertia 119869119909 119869119910 119869119911 [kgsdotm2] 303 3063 3063
Lateral force provided by individual jets [N] 2200Distance between jet ring center and centerof mass [m] 126
Range of angle of attack [rad] minus120587
6le 120572 le
120587
6
Range of pitch angular velocity [rads] minus5120587
3le 119903 le
5120587
3
Range of elevator deflection [rad] minus120587
6le 120575119911 le
120587
6
ignoredWith (16) themissile attitude control model of pitchchannel is
= 119903 minus
119876119878 (119862120572
119910120572 + 119862
120575119911
119910120575119911) cos120572
119898119881minus
(1 + 119870119865119910
) 119865119910119887
cos120572
119898119881
119903 =
(1 + 119870119872119911
) 119865119910119887
119897
119869119911
+119876119878119871119898
120572
119911120572
119869119911
+119876119878119871119898
120575119911
119911120575119911
119869119911
+119876119878119871119898
119903
119911119903
119869119911
(17)
Choose 119909 = [120572 119903]119879 as system state and 119906 = [120575119911 119865119910
119887
]119879 as
control input The considered output is 119910 = 120572 Then (17) canbe rewritten into the following state space form
= 119891 (119909) + 119892 (119909) 119906
119910 = [1 0] 119909
(18)
where
119891 (119909) =
[[[[
[
119903 minus
119876119878119862120572
119910120572 cos120572
119898119881
119876119878119871 (119898120572
119911120572 + 119898
119903
119911119903)
119869119911
]]]]
]
119892 (119909) =
[[[[[[
[
minus
119876119878119862120575119911
119910cos120572
119898119881minus
(1 + 119870119865119910
) cos120572
119898119881
119876119878119871119898120575119911
119911
119869119911
(1 + 119870119872119911
) 119897
119869119911
]]]]]]
]
(19)
The missile parameters are presented in Table 1Generally the aerodynamic coefficients 119862
120572
119910 119862120575119911
119910 119898120572
119911
and 119898120575119911
119911and the amplification factors 119870119865
119910
119870119872119911
are mainlyaffected by the flight velocity 119881 and the angle of attack 120572
[11 12] Since the terminal guidance phase is consideredin this paper the flight time is quite short and the flightvelocity of the missile can be treated as a constant Thusthe aerodynamic coefficients and the amplification factors are
6 International Journal of Aerospace Engineering
mainly affected by the angle of attack 120572 The relationshipsbetween them are shown in Figure 5
In practical application since 120572 is the main factor thatleads to system nonlinearities the system model is usuallylinearized if 120572 varies in small range As seen from Figure 5curves of the relation between aerodynamic parametersand angle of attack can be expressed by six line segmentsapproximately Here we choose 120572 = minus037 rad minus0153 rad0 0153 rad and 037 rad as the operation points and dividethe whole operation region into six subregions As a resultthe original model (17) can be converted to the followingpiecewise affine models
=
1198861119909 + 1198871119906 + 1198901 [1 0] 119909 le minus037
1198862119909 + 1198872119906 + 1198902 minus037 lt [1 0] 119909 le minus0153
1198863119909 + 1198873119906 + 1198903 minus0153 lt [1 0] 119909 le 0
1198864119909 + 1198874119906 + 1198904 0 lt [1 0] 119909 le 0153
1198865119909 + 1198875119906 + 1198905 0153 lt [1 0] 119909 le 037
1198866119909 + 1198876119906 + 1198906 [1 0] 119909 gt 037
(20)
119910 = [1 0] 119909 (21)
where
119886119894 =120597119891(119909)
120597119909
10038161003816100381610038161003816100381610038161003816119909=1199091198940
= [11988611
11989411988612
119894
11988621
11989411988622
119894
]
119887119894 = 119892 (1199091198940) = [11988711
11989411988712
119894
11988721
11989411988722
119894
] 119890119894 = [1198901
119894
1198902
119894
]
11988611
119894=
1205971198911 (119909)
120597120572
10038161003816100381610038161003816100381610038161003816119909=1199091198940
= minus119876119878
119898119881(
120597119862120572
119910
120597120572
1003816100381610038161003816100381610038161003816100381610038161003816120572=1205721198940
1205721198940 cos1205721198940 + 119862120572
119910(1205721198940) cos1205721198940
minus 119862120572
119910(1205721198940) 1205721198940 sin1205721198940)
11988612
119894=
1205971198911(119909)
120597119903
10038161003816100381610038161003816100381610038161003816119909=1199091198940
= 1
11988621
119894=
1205971198912 (119909)
120597120572
10038161003816100381610038161003816100381610038161003816119909=1199091198940
=119876119878119871
119869119911
(120597119898120572
119911
120597120572
100381610038161003816100381610038161003816100381610038161003816120572=1205721198940
1205721198940 + 119898120572
119911(1205721198940) +
120597119898119903
119911
120597120572
100381610038161003816100381610038161003816100381610038161003816120572=1205721198940
1199031198940)
11988622
119894=
1205971198912(119909)
120597119903
10038161003816100381610038161003816100381610038161003816119909=1199091198940
=119876119878119871
119869119911
119898120572
119911(1205721198940)
11988711
119894= minus
119876119878119862120575119911
119910(1205721198940) cos1205721198940119898119881
11988712
119894= minus
(1 + 119870119865119910
(1205721198940)) cos1205721198940119898119881
11988721
119894=
119876119878119871119898120575119911
119911(1205721198940)
119869119911
11988722
119894=
(1 + 119870119872119911
(1205721198940)) 119897
119869119911
1198901
119894= 11988611
1198941205721198940 + 119886
12
1198941199031198940
1198902
119894= 11988621
1198941205721198940 + 119886
22
1198941199031198940
(22)
where 119894 (119894 = 1 2 6) is the label corresponding to the 119894thregion
From Table 1 and Figure 5 we get the set of aerodynamicparameters at the point (119867119881) = (20 km 1000ms) as shownin Table 2
Choose the sampling period 119879119904 = 0025 s The discretestate-space expression is then given by
119909 (119896 + 1)
=
1198861119909 (119896) + 1119906 (119896) + 1198901 [1 0] 119909 (119896) le minus037
1198862119909 (119896) + 2119906 (119896) + 1198902 minus037 lt [1 0] 119909 (119896) le minus0153
1198863119909 (119896) + 3119906 (119896) + 1198903 minus0153 lt [1 0] 119909 (119896) le 0
1198864119909 (119896) + 4119906 (119896) + 1198904 0 lt [1 0] 119909 (119896) le 0153
1198865119909 (119896) + 5119906 (119896) + 1198905 0153 lt [1 0] 119909 (119896) le 037
1198866119909 (119896) + 6119906 (119896) + 1198906 [1 0] 119909 (119896) gt 037
(23)
119910 (119896) = [1 0] 119909 (119896) (24)
where
1198861 = [104 0025
022 0995] 1198862 = [
1051 0025
0218 0995]
1198863 = [1023 00252
0248 09951] 1198864 = [
09954 00248
02732 09954]
1198865 = [09697 00245
02913 09956] 1198866 = [
09594 00244
03137 09959]
1198901 = [minus00183
minus01123] 1198902 = [
minus00175
minus00792]
1198903 = [minus00131
minus00376] 1198904 = [
0
0]
1198905 = [minus00053
00454] 1198906 = [
minus00169
01193]
1 = [minus0028 159 times 10
minus6
minus2166 142 times 10minus4]
2 = [minus003 218 times 10
minus6
minus2224 187 times 10minus4]
International Journal of Aerospace Engineering 7
2
15
1
05
0
minus05
minus1
minus15minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (Q
SmV
)C120572 y
(a) Relation between 119862120572119910and 120572
0092
009
0088
0086
0084
0082
008
0078
0076
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (Q
SmV
)C120575119911y
(b) Relation between 119862120575119911119910 and 120572
125
12
115
11
105
10
95
9minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (Q
SLJz)m
120572 z
(c) Relation between119898120572119911and 120572
96
94
92
90
88
86
84minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (minusQSL
Jz)m
120575119911z
(d) Relation between119898120575119911119911 and 120572
1
09
08
07
06
05
04
03
02
01
Am
plifi
catio
n fa
ctorKF
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
(e) Relation between119870119865119910
and 120572
12
11
1
09
08
07
06
05
04
03
Am
plifi
catio
n fa
ctorKM119911
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
(f) Relation between119870119872119911
and 120572
Figure 5 Aerodynamic parameters as functions of angle of attack
8 International Journal of Aerospace Engineering
Table 2 Aerodynamic parameters of pitch channel
Aerodynamic parameter 119876119878119862120572
119910119898119881 119876119878119862
120575119911
119910119898119881 119876119878119871119898
120572
119911119869119911
119876119878119871119898119903
119911119869119911
119876119878119871119898120575119911
119911119869119911
120572 = minus053 minus1175 0076 947 minus032 minus8489
120572 = minus037 minus0944 0082 973 minus032 minus8924
120572 = minus0153 minus023 0082 1043 minus032 minus8938
120572 = 0 036 009 1101 minus032 minus9510
120572 = 0153 094 0082 1158 minus032 minus8934
120572 = 037 163 0082 1224 minus032 minus8918
3 = [minus003 268 times 10
minus6
minus2228 223 times 10minus4]
4 = [minus0032 277 times 10
minus6
minus2371 232 times 10minus4]
5 = [minus003 227 times 10
minus6
minus2228 198 times 10minus4]
6 = [minus0029 191 times 10
minus6
minus2224 173 times 10minus4]
(25)
32 Constraints Analysis Due to the symmetry of jet config-uration the set of possible negative pitch control force is givenby
119880119910minus
119865= minus119865119898 minus2119865119898 cos
120587
9 minus2119865119898 cos
120587
18 minus2119865119898 minus4119865119898 cos
120587
9
minus4119865119898 cos120587
18
(26)
By combining (13) and (26) we obtain the set of allpossible pitch control force
119880119910
119865= 119865119898 2119865119898 cos
120587
9 2119865119898 cos
120587
18 2119865119898 4119865119898 cos
120587
9
4119865119898 cos120587
18 minus119865119898 minus2119865119898 cos
120587
9 minus2119865119898 cos
120587
18 minus2119865119898
minus4119865119898 cos120587
9 minus4119865119898 cos
120587
18
(27)
Substituting the jet parameters shown in Table 1 into theforegoing set yields
119880119910
119865= 2200 4135 4333 4400 8269 8666 minus2200 minus4135
minus4333 minus4400 minus8269 minus8666
(28)
Noting that the lateral forces are discrete variable we willutilize the linear combination of logical variables to describethe lateral force In terms of piecewise affine model (20) we
introduce logical variables 120575119865119894
isin 0 1 119894 = 1 2 12 toexpress the lateral thrust 119865119910
119887
119865119910119887
= 22001205751198651
+ 41351205751198652
+ 43331205751198653
+ 44001205751198654
+ 82691205751198655
+ 86661205751198656
minus 22001205751198657
minus 41351205751198658
minus 43331205751198659
minus 440012057511986510
minus 826912057511986511
minus 866612057511986512
(29)
In (29) the logical variables should satisfy the constraints
12
sum
119894=1
120575119865119894
= 0 or 1 (30)
where 0 means that no lateral force is generated while 1
means that the applied lateral force equals to one element ofset 119880119910119865
Denote 1199061 = 120575119911 the control input 119906 in model (23) can berewritten as
119906 = [1199061 119865119910119887
]119879 (31)
As shown in Table 1 the constraints on system states andcontrol input are
119909min le 119909 (119896) le 119909max
1199061min le 1199061 (119896) le 1199061max(32)
where 119909min = [minus053 minus522]119879 119909max = [053 522]
119879 1199061min =
minus053 1199061max = 053According to (30) we have
12
sum
119894=1
120575119865119894
le 1 (33)
which shows the constraint on the logical control inputUse logical variables 120575119894(119896) isin 0 1 119894 = 1 2 5 to
describe the operation points which satisfy the constraints
[1 0] 119909 (119896) + 037 le 0 lArrrArr 1205751 (119896) = 1
[1 0] 119909 (119896) + 0153 le 0 lArrrArr 1205752 (119896) = 1
[1 0] 119909 (119896) le 0 lArrrArr 1205753 (119896) = 1
[1 0] 119909 (119896) minus 0153 le 0 lArrrArr 1205754 (119896) = 1
[1 0] 119909 (119896) minus 037 le 0 lArrrArr 1205755 (119896) = 1
(34)
International Journal of Aerospace Engineering 9
Equation (34) can be transformed into the followingequivalent mixed logical inequalities [13]
[1 0] 119909 (119896) + 037 ge 120576 + (1198981 minus 120576) 1205751 (119896)
[1 0] 119909 (119896) + 037 le 1198721 (1 minus 1205751 (119896))
[1 0] 119909 (119896) + 0153 ge 120576 + (1198982 minus 120576) 1205752 (119896)
[1 0] 119909 (119896) + 0153 le 1198722 (1 minus 1205752 (119896))
[1 0] 119909 (119896) ge 120576 + (1198983 minus 120576) 1205753 (119896)
[1 0] 119909 (119896) le 1198723 (1 minus 1205753 (119896))
[1 0] 119909 (119896) minus 0153 ge 120576 + (1198984 minus 120576) 1205754 (119896)
[1 0] 119909 (119896) minus 0153 le 1198724 (1 minus 1205754 (119896))
[1 0] 119909 (119896) minus 037 ge 120576 + (1198985 minus 120576) 1205755 (119896)
[1 0] 119909 (119896) minus 037 le 1198725 (1 minus 1205755 (119896))
(35)
where 1198981 = minus016 1198721 = 090 1198982 = minus0377 1198722 = 06831198983 = minus053 1198723 = 053 1198984 = minus0683 1198724 = 0377 1198985 =
minus0901198725 = 016 and 120576 = 10minus6
In addition we introduce the auxiliary logical variables120575119894(119896) isin 0 1 119894 = 6 9 as follows
1205756 (119896) = (1 minus 1205751 (119896)) 1205752 (119896)
1205757 (119896) = (1 minus 1205752 (119896)) 1205753 (119896)
1205758 (119896) = (1 minus 1205753 (119896)) 1205754 (119896)
1205759 (119896) = (1 minus 1205754 (119896)) 1205755 (119896)
(36)
With 1205751 1205756 1205757 1205758 1205759 and 1 minus 1205755 the six regions canbe presented Similarly (36) can be transformed into theequivalent mixed logical inequalities
minus1205751 (119896) + 1205752 (119896) minus 1205756 (119896) le 0
1205751 (119896) + 1205756 (119896) le 1
minus1205752 (119896) + 1205756 (119896) le 0
minus1205752 (119896) + 1205753 (119896) minus 1205757 (119896) le 0
1205752 (119896) + 1205757 (119896) le 1
minus1205753 (119896) + 1205757 (119896) le 0
minus1205753 (119896) + 1205754 (119896) minus 1205758 (119896) le 0
1205753 (119896) + 1205758 (119896) le 1
minus1205754 (119896) + 1205758 (119896) le 0
minus1205754 (119896) + 1205755 (119896) minus 1205759 (119896) le 0
1205754 (119896) + 1205759 (119896) le 1
minus1205755 (119896) + 1205759 (119896) le 0
(37)
To describe the state space model of each region weintroduce the following auxiliary continuous variables
1199111 (119896) = (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) 1205751 (119896)
1199112 (119896) = (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) 1205756 (119896)
1199113 (119896) = (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) 1205757 (119896)
1199114 (119896) = (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) 1205758 (119896)
1199115 (119896) = (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) 1205759 (119896)
1199116 (119896) = (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) (1 minus 1205755 (119896))
(38)
Equation (38) can be converted to the equivalent mixedlogical inequalities
1199111 (119896) ge (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) minus 1198721198911 (1 minus 1205751 (119896))
1199111 (119896) le (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) minus 1198981198911 (1 minus 1205751 (119896))
1199111 (119896) ge 11989811989111205751 (119896)
1199111 (119896) le 11987211989111205751 (119896)
1199112 (119896) ge (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) minus 1198721198912 (1 minus 1205756 (119896))
1199112 (119896) le (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) minus 1198981198912 (1 minus 1205756 (119896))
1199112 (119896) ge 11989811989121205756 (119896)
1199112 (119896) le 11987211989121205756 (119896)
1199113 (119896) ge (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) minus 1198721198913 (1 minus 1205757 (119896))
1199113 (119896) le (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) minus 1198981198913 (1 minus 1205757 (119896))
1199113 (119896) ge 11989811989131205757 (119896)
1199113 (119896) le 11987211989131205757 (119896)
1199114 (119896) ge (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) minus 1198721198914 (1 minus 1205758 (119896))
1199114 (119896) le (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) minus 1198981198914 (1 minus 1205758 (119896))
1199114 (119896) ge 11989811989141205758 (119896)
1199114 (119896) le 11987211989141205758 (119896)
1199115 (119896) ge (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) minus 1198721198915 (1 minus 1205759 (119896))
1199115 (119896) le (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) minus 1198981198915 (1 minus 1205759 (119896))
10 International Journal of Aerospace Engineering
1199115 (119896) ge 11989811989151205759 (119896)
1199115 (119896) le 11987211989151205759 (119896)
1199116 (119896) ge (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) minus 11987211989151205755 (119896)
1199116 (119896) le (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) minus 11989811989151205755 (119896)
1199116 (119896) ge 1198981198916 (1 minus 1205755 (119896))
1199116 (119896) le 1198721198916 (1 minus 1205755 (119896))
(39)
where1198721198911 = [073 1084]1198791198981198911 = [minus077 minus1106]
1198791198721198912 =[076 1166]
119879 1198981198912 = [minus079 minus 1256]119879 1198721198913 =
[077 1273]119879 1198981198913 = [minus078 minus 1280]
119879 1198721198914 =
[076 1403]119879 1198981198914 = [minus076 minus 1403]
119879 1198721198915 =
[0725 1291]119879 1198981198915 = [minus0736 minus 1205]
119879 1198721198916 =
[0696 1154]119879 and1198981198916 = [minus073 minus 1130]
119879Then the whole MLD model of the missile is given by
119909 (119896 + 1) =
6
sum
119894=1
119911119894 (119896)
119910 (119896) = [1 0] 119909 (119896)
st (28) (30) (32) (34) (36) (38)
(40)
where (29) (31) (33) (35) (37) and (39) represent all theconstraint inequalities
4 Autopilot Design UsingHybrid MPC Method
In general we expect that the output 119910 tracks its command 119910119888
as fast as possible with a small amount of fuel consumptionMotivated by this observation we consider the followingoptimization problem
119869lowast
= min119906(119896)119906(119896+1)120575(119896)120575(119896+1|119896)119911(119896)119911(119896+1|119896)
119873
sum
119894=1
(1003817100381710038171003817119910 (119896 + 119894 | 119896)
minus119910119888 (119896 + 119894)1003817100381710038171003817
2
119876
+ 119906(119896 + 119894)2
119877)
st MLD model (39)
1199061min le 1199061 (119896) 1199061 (119896 + 1) le 1199061max
119909min le 119909 (119896) 119909 (119896 + 1) le 119909max
(41)
where 119910119888 is the command for angle of attack 119910(119896 + 119894 | 119896) ispredictive value of angle of attack 119873 denotes the predictivehorizon 119876 and 119877 are the weighting matrices and 119877 =
diag(119877120575119911
119877119865119910
) 119877120575119911
119877119865119910
are weighted coefficients of aerody-namic control surfaces and lateral pulse jets respectivelyThe
ratio of 119877120575119911
and 119877119865119910
represents the control allocation betweenaerodynamic control surfaces and lateral pulse jets When119877119865119910
119877120575119911
is increased the requirement for lateral force will bedeclined that is the fuel consumption can be lessened Inaddition the deduction can be verified from the simulationresults of Case 1 and Case 2
Different control allocation between the dual actuators(aerodynamic control surfaces and lateral pulse jets) can beobtained by setting different 119876 and 119877 Since both logicaland continuous variables are involved in (41) the aboveon-line optimization problem is a mixed integer quadraticprogramming (MIQP) problemwhich can be solved by usingthe hybrid MPC toolbox of MATLAB [14 15]
Remark 2 In an explicit MPC controller the main factorsaffecting the number of subregions include the systemdimen-sion the predictive horizon and the number of constrains Inthis paper the blendedmissile with aerodynamic control sur-faces and lateral jets is investigated To deal with the discreteproperty of the lateral jet forces some logical variables areintroduced for MPC controller design which increases thenumber of subregions inevitably
5 Numerical Simulations
51 Case 1 Numerical simulations are performed to ver-ify the feasibility of the proposed method in this sectionThe involved parameters are given in Table 1 The weightmatrices are set as 119876 = 10 119877120575
119911
= 0025 and 119877119865119910
=
diag(0005 0005 0005) Suppose the initial state is 1205720 =0 1199030 = 0 In order to avoid excessive computational load wechoose predictive horizon119873 = 2 and control horizon119872 = 2The command for angle of attack is 120572119888 = 02 rad
Explicit form of the optimal controller is provided byhybrid toolbox which is not given here for simplicity Insteadwe present the partition results associated with the controllerin Figure 6 where 4190 subregions are obtained and for eachsubregion a control law of the form 119906 = 119870119909 + 119887 is givenAs a benefit of using explicit MPC the controller parameters119870 and 119887 for all the subregions are obtained simultaneouslyonce the optimization problem is solved This property isobviously different from that of gain-scheduled controller(where the controller parameters for different regions areseparately determined)
However by a simple calculation we conclude that thesesubregions donot require toomuch storage space (the neededstorage space is approximately 14 times 8 times 4190 = 450KB)Moreover it should be noted that when the algorithm isimplemented in practice much more time will be needed toidentify which subregion the current states enter into This isanother important factor that affects the computational costof the proposed algorithm
The simulation results are shown in Figures 7ndash9 It isseen from Figure 7 that the actual angle of attack tracksthe command in less than 01 seconds As shown in Figures8 and 9 the aerodynamic force converges to a constant astime increases while the jets are only activated during thebeginning period (when the tracking error is obvious)
International Journal of Aerospace Engineering 11
58
68
73
108
174
180
245
252
254
270
271
272
273
274
276
277
299
300
301
302
06
04
02
0
minus02
minus04
Elev
ator
defl
ectio
n (r
ad)
Angle of attack (rad)minus04 minus02 0 02 04 06
1634
1635
1638
1648
1649
1650
1664
1673
1677
1678
1679
1712
1726
1743
1744
1746
1748
1751
1752
1983
1985
1993
2011
Late
ral f
orce
(N)
Angle of attack (rad)minus04 minus02 0 02 04 06
1000
800
600
400
200
0
minus200
minus400
minus600
minus800
minus1000
Polyhedral partitionmdash4190 regions Polyhedral partitionmdash4190 regions
Figure 6 The partition associated with the explicit controller
025
02
015
01
005
0
ActualCommand
0 02 04 06 08 1
Time (s)
Ang
le o
f atta
ck (r
ad)
Figure 7 The response of angle of attack
52 Case 2 The results for the case with a different weight119877120575119911
= 0005 are shown in Figures 10ndash12 It is seen that adifferent control allocation result is obtained
04
02
0
minus02
minus04
minus060 02 04 06 08 1
Time (s)
Elev
ator
defl
ectio
n (r
ad)
Figure 8 The response of elevator deflection
53 Case 3 In this case a different command 120572119888 =
02 cos(05120587119905) rad is considered and the weight matrices arethe same as the ones for Case 1 The simulation results areshown in Figures 13ndash15
It is seen from Figure 13 that asymptotic tracking is alsoachievedThemethod proposed in this paper can realize both
12 International Journal of Aerospace Engineering
1
05
0
minus05
minus1
times104
0 02 04 06 08 1
Time (s)
Late
ral f
orce
(N)
Figure 9 The response of lateral force
025
02
015
01
005
0
Ang
le o
f atta
ck (r
ad)
0 02 04 06 08 1
Time (s)
ActualCommand
Figure 10 The response of angle of attack
06
04
02
0
minus02
minus04
minus06
minus08
Elev
ator
defl
ectio
n (r
ad)
0 02 04 06 08 1
Time (s)
Figure 11 The response of elevator deflection
1
05
0
minus05
minus1
Late
ral f
orce
(N)
times104
0 02 04 06 08 1
Time (s)
Figure 12 The response of lateral force
03
025
02
015
01
005
0
minus005
minus01
minus015
minus02
Ang
le o
f atta
ck (r
ad)
0 05 1 15 2 25 3 35 4
Time (s)
ActualCommand
Figure 13 The response of angle of attack
06
04
02
0
minus02
minus04
minus06
minus08
Elev
ator
defl
ectio
n (r
ad)
0 05 1 15 2 25 3 35 4
Time (s)
Figure 14 The response of elevator deflection
International Journal of Aerospace Engineering 13
1
08
06
04
02
0
minus02
minus04
minus06
minus08
minus1
Late
ral f
orce
(N)
0 05 1 15 2 25 3 35 4
Time (s)
times104
Figure 15 The response of lateral force
fast tracking command and control allocation It is seen fromFigure 15 that the jets are activated while the tracking erroris obvious or command is varying rapidly
6 Conclusion
An autopilot design method for a missile with aerodynamiccontrol surfaces and lateral jets is presented in this paperThe nonlinear attitude control model is reduced to an MLDmodel Meanwhile the lateral force is described as linearcombination of logical variables due to the discrete values oflateral force Then the whole MLD model of attitude controlsystem is derived Autopilot design is accomplished usinghybrid MPC method By setting the related weighted coeffi-cients in index function the control allocation is obtainedMoreover numerical simulations are performed under thedifferent conditions the performance of tracking the attitudecommand and control allocation is verified and the explicitform of the control law can be obtained as well
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research presented in this document is supportedby the National Natural Science Foundation of Chinaunder Grant nos 61104193 61203191 and 61333001 theFundamental Research Funds for the Central Universities(HITNSRIF2012032) the Program for IBRSEM in HarbinInstitute of Technology under Grant HITIBRSEMA201415and the Foundation of Supporting Technology for Aerospaceunder Grant 2014-HT-HGD7
References
[1] R Hirokawa K Sato and S Manabe ldquoAutopilot design fora missile with reaction-jet using coefficient diagram methodrdquoin Proceedings of the AIAA Guidance Navigation and ControlConference and Exhibit 2001 August 2001
[2] P K Menon and V R Iragavarapu Adaptive Techniques forMultiple Actuator Blending Defense Technical InformationCenter 1998
[3] A G Munson and M W Garbrick ldquoJet interaction investiga-tionrdquo Report OR-9933 Martin Marietta Orlando Fla USA1969
[4] M Graham and P Weinacht ldquoNumerical simulation of lateralcontrol jetsrdquo in Proceedings of the 37th Aerospace SciencesMeeting and Exhibit 1999 AIAA Paper
[5] J S Shamma and J R Cloutier ldquoGain-scheduledmissile autopi-lot design using linear parameter varying transformationsrdquoJournal of Guidance Control and Dynamics vol 16 no 2 pp256ndash263 1993
[6] M Innocenti and A Thukral ldquoSimultaneous reaction jet andaerodynamic control of missile systemsrdquo AlAA 93-3739-CP1993
[7] D B Ridgely Y Lee and T Fanciullo ldquoDual aeropropulsivemissile control-optimal control and control allocationrdquo inProceedings of the AIAA Guidance Navigation and ControlConference and Exhibit Keystone Colo USA 2006
[8] D B Ridgely D Drake L Triplett and C Geise ldquoDynamiccontrol allocation of a missile with tails and reaction jetsrdquo inProceedings of the AIAA Guidance Navigation and ControlConference pp 3158ndash3189 August 2007
[9] D Q Mayne J B Rawlings C V Rao and P O ScokaertldquoConstrained model predictive control stability and optimal-ityrdquo Automatica vol 36 no 6 pp 789ndash814 2000
[10] A Bemporad F Borrelli and M Morari ldquoModel predictivecontrol based on linear programmingmdashthe explicit solutionrdquoIEEE Transactions on Automatic Control vol 47 no 12 pp1974ndash1985 2002
[11] C Jouannet and P Krus ldquoModelling of high angle of attackaerodynamicrdquo in Proceedings of the 25th AIAA Applied Aerody-namics Conference pp 1481ndash1516 June 2007
[12] S Venugopal and M Krishnamurthy ldquoMissile aerodynamics athigh angles of attack a prediction coderdquo Journal of Spacecraftand Rockets vol 32 no 2 pp 263ndash269 1995
[13] A Bemporad ldquoEfficient conversion of mixed logical dynamicalsystems into an equivalent piecewise affine formrdquo IEEE Trans-actions on Automatic Control vol 49 no 5 pp 832ndash838 2004
[14] F D Torrisi andA Bemporad ldquoHYSDELmdasha tool for generatingcomputational hybrid models for analysis and synthesis prob-lemsrdquo IEEE Transactions on Control Systems Technology vol 12no 2 pp 235ndash249 2004
[15] A Bemporad W P M H Heemels and B De SchutterldquoOn hybrid systems and closed-loop MPC systemsrdquo IEEETransactions on Automatic Control vol 47 no 5 pp 863ndash8692002
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 International Journal of Aerospace Engineering
these facts this paper attempts to design an autopilot usingexplicit hybrid MPC for blended missiles by noting thatMPC is a promising methodology for the control problem ofconstrained uncertain systems [9] and that the computationalburden of on-line optimization is effectively reduced by usingexplicit MPC instead of traditional MPC [10]
The remainder of this paper is as follows Section 2gives a mathematical model of blended missile including theconfiguration of reaction jets In Section 3 the piecewiseaffine model of blended missile is established followed by anMLD model which is obtained based on the equivalence ofpiecewise affine model and mixed logical dynamical modelIn Section 4 a hybrid MPC based method for autopilotdesign is proposed and an explicit control law is constructedIn Section 5 the effectiveness of the proposed methodis verified by simulation cases under different conditionsFinally several concluding remarks are given in Section 6
2 Mathematical Model of the Missile
The plane reference coordinate system 119874119880119881119882 the bodycoordinate system 119874119909119887119910119887119911119887 the trajectory coordinate sys-tem 119874119909119908119910119908119911119908 and velocity coordinate system 119874119909V119910V119911V areinvolved in this paper Figure 1 shows a missile with some keyvariables and identified axes The axes 119911119908 119911V are not givenwhose directions can be determined by the right hand rule
21 Missile Dynamic Model Thenonlinear motion equationsare given by
119898 = 119875 cos120572 cos120573 minus 119883119886 minus 119898119892 sin 120579 + 119865119886
119909119908
119898119881 120579 = 119875 (sin120572 cos 120574V + cos120572 sin120573 sin 120574V) + 119884119886 cos 120574V
minus 119898119892 cos 120579 + 119865119886
119910119908
119898119881 cos 120579V = minus 119875 (sin120572 sin 120574V minus cos120572 sin120573 cos 120574V)
minus 119884119886 sin 120574V minus 119885119886 cos 120574V minus 119865119886
119911119908
(1)
119869119909 = (119869119910 minus 119869119911) 119903119902 + 119872119909
119869119910 119902 = (119869119911 minus 119869119909) 119901119903 + 119872119910
119869119911 119903 = (119869119909 minus 119869119910) 119901119902 + 119872119911
(2)
where 119865119886
119909119908
119865119886
119910119908
119865119886
119911119908
are lateral forces in the 119909 119910 and 119911
directions of trajectory coordinate system respectively Forsimplicity we suppose that the body is symmetric about the119909-axis that is 119869119909119910 = 119869119910119911 = 119869119911119909 = 0 In (2) each of themoments119872119909119872119910 and119872119911 contains two components that are generatedby aerodynamic surface and the lateral pulse jets respectively
119872119909 = 119872119890119909 + 119872119886
119909119887
119872119910 = 119872119890119910 + 119872119886
119910119887
119872119911 = 119872119890119911 + 119872119886
119911119887
(3)
yw
y
V(yb)
q
120574 xw(x)
120573120572
120579O
r
W(zb)
Jets
U(xb)
120595 p
Figure 1 Key coordinate systems
where 119872119890119909 119872119890119910 and 119872119890119911 denote aerodynamic momentcomponents and 119872
119886
119909119887
119872119886119910119887
and 119872119886
119911119887
are pulse jet momentcomponents
22 Lateral Jet Forces and Moments Model As shown inFigure 1 the lateral jet force is generated by 180 pulse jetslocated in front of the center of mass of PAC-3 These jets aredivided into 10 rings and arranged in staggered positions (18pulse jets are included in each ring) In each ring these jetsare uniformly distributed and the central angle between twoneighboring jets is 20 degree Use 119894 (119894 = 1 2 10) and 119895
(119895 = 1 2 18) to denote the ringrsquos label and the jetrsquos labelin each ring respectivelyThe distance between ring 119894 and thecenter ofmass is denoted by 119897119894 while spacing of adjacent ringsis Δ119897 The layout scheme of pulse jets is shown in Figures 2and 3 Assume the force generated by each individual jet isa constant 119865119898 In body coordinate system the lateral forcegenerated by the (119894 119895) pulse jet is given by
[[
[
119865119894119895
119909119887
119865119894119895
119910119887
119865119894119895
119911119887
]]
]
=
[[[[[
[
0
119865119898 cos(2119895 minus 119894lowast
18120587)
minus119865119898 sin(2119895 minus 119894lowast
18120587)
]]]]]
]
(4)
The corresponding moment is given by
[[
[
119872119894119895
119909119887
119872119894119895
119910119887
119872119894119895
119911119887
]]
]
=
[[[[[
[
0
119865119898119897119894 sin(2119895 minus 119894lowast
18120587)
119865119898119897119894 cos(2119895 minus 119894lowast
18120587)
]]]]]
]
(5)
International Journal of Aerospace Engineering 3
12
3
4
5
6
7
8
910
11
12
13
14
15
16
17
18
yb
zb
(a) Odd-numbered rings
1
2
3
4
5
6
7
8
91011
12
13
14
15
16
17
18
yb
zb
(b) Even-numbered rings
Figure 2 The layout scheme of lateral pulse jets
where
119894lowast= 2 119894 is odd
119894lowast= 1 119894 is even
(6)
For the situation where all pulse jets are fired at the sametime the total force and moment are given by
[
[
119865119909119887
119865119910119887
119865119911119887
]
]
=
[[[[[[[[[[
[
0
119894=10
sum
119894=1
119895=18
sum
119895=1
119865119894119895
119910119887
119894=10
sum
119894=1
119895=18
sum
119895=1
119865119894119895
119911119887
]]]]]]]]]]
]
[
[
119872119909119887
119872119910119887
119872119911119887
]
]
=
[[[[[[[[[[
[
0
minus
119894=10
sum
119894=1
119895=18
sum
119895=1
119865119894119895
119911119887
119897119894
119894=10
sum
119894=1
119895=18
sum
119895=1
119865119894119895
119910119887
119897119894
]]]]]]]]]]
]
(7)
In order to avoid the coupling between the pitch momentand yaw moment each ring is divided into four controlregions positive pitch negative pitch positive yaw andnegative yaw control region as shown in Figure 4
The autopilot design of PAC-3 is more complicated thanthat of other conventional missiles which are controlled
12
88
99
1010
1111
1212
xb
zb
i
lil1
Δl
middot middot middotmiddot middot middot
O
Figure 3 The ring frames expansion of lateral pulse jets
only by aerodynamic surfaces due to the hybrid propertyof control inputs and the on-off property of pulse jet (thepulse jet can be fired only one time) To deal with thisproblem the work [7] proposed two-step design procedures(1) in the first step neglect the hybrid property (or on-offproperty) and design the expected force andmoment signals(2) in the other step the fire logic is derived by solving theretaliation problem of these signals with taking into accountthe hybrid property (or on-off property) Different fromthe above traditional procedures a novel procedure will bepresented in what follows where only one step is included Inpractical applications only a small number of jets (in a certainof rings) are activated over a finite time interval To make theidea of the following development clear we here consider asimple but representative situation where no more than two
4 International Journal of Aerospace Engineering
yb
zb
Negative pitchcontrol region
Negative yawcontrol region
Positive pitchcontrol region
Positive yawcontrol region
17
8
910
11
12
12
3
4
5
6
713
14
15
16
18
(a) Odd-numbered rings
1
2
3
4
5
6
7
8
910
11
12
13
14
15
16
17
18
yb
zb
Negative pitchcontrol region
Negative yawcontrol region
Positive pitchcontrol region
Positive yawcontrol region
(b) Even-numbered rings
Figure 4 Schematic of control regions
rings are allowed to be fired simultaneously and no morethan two jets are activated in each fired ring Meanwhile itshould be ensured that only odd rings or even rings are firedand the jets are fired symmetrically about the correspondingsymmetry axis of each control region
Take the positive pitch control region as an example Theforces provided by the jets (119894 1) (119894 2) (119894 3) (119894 17) and (119894 18)
in an odd ring are given by
119865119900 = [119865119898 119865119898 cos120587
9119865119898 cos
2120587
9119865119898 cos
2120587
9119865119898 cos
120587
9]
119879
(8)
Similarly the forces provided by the jets (119894 1) (119894 2) (119894 17)and (119894 18) in an even ring are given by
119865119890 = [119865119898 cos120587
18119865119898 cos
120587
6119865119898 cos
120587
6119865119898 cos
120587
18]
119879
(9)
where119865119900 and119865119890 denote the forces associated with an odd ringand an even ring respectively
Use 119865119894 to denote the lateral force generated by ring 119894
Clearly 119865119894 should satisfy the condition
1198651= 1198659 119865
3= 1198657 119865
2= 11986510 119865
4= 1198658 (10)
When odd ring is fired the lateral force and moment aregiven by
119865119910119887
isin 119865119898 2119865119898 cos120587
9 2119865119898 cos
2120587
9 2119865119898 4119865119898 cos
120587
9
4119865119898 cos2120587
9
119872119911119887
isin 1198651198981198975 21198651198981198975 cos120587
9 21198651198981198975 cos
2120587
9 21198651198981198975
41198651198981198975 cos120587
9 41198651198981198975 cos
2120587
9
(11)
While even ring is fired the lateral force and moment aregiven by
119865119910119887
isin 2119865119898 cos120587
18 2119865119898 cos
120587
6 4119865119898 cos
120587
18 4119865119898 cos
120587
6
119872119911119887
isin 21198651198981198976 cos120587
18 21198651198981198976 cos
120587
6 41198651198981198976 cos
120587
18
41198651198981198976 cos120587
6
(12)
Noting Δ119897 is quite small we consider 1198975 ≃ 1198976 = 119897 Inorder to ensure that the jets fire efficiency the jets resultingin small moment components along 119911119887 axis are not activatedAs a result the sets of forces and moments are respectivelygiven by
119880119910+
119865= 119865119898 2119865119898 cos
120587
9 2119865119898 cos
120587
18 2119865119898 4119865119898 cos
120587
9
4119865119898 cos120587
18
(13)
119880119910+
119872= 119865119898119897 2119865119898119897 cos
120587
9 2119865119898119897 cos
120587
18 2119865119898119897 4119865119898119897 cos
120587
9
4119865119898119897 cos120587
18
(14)
where 119865119910119887
isin 119880119910+
119865and119872119911
119887
isin 119880119910+
119872 During each control period
a control moment belonging to119880119910+
119872will be used as the input
The mutual interference between high-speed jet streamand air leads to lateral jet interference effect In orderto take into account this interference force and moment
International Journal of Aerospace Engineering 5
amplification factors 119870119865119910
119870119865119911
119870119872119910
and 119870119872119911
are introducedas in [3 4]Then the resulting lateral forces andmoments are
[[[
[
119865119886
119909119887
119865119886
119910119887
119865119886
119911119887
]]]
]
= [
[
0
119865119910119887
+ 119870119865119910
119865119910119887
119865119911119887
+ 119870119865119911
119865119911119887
]
]
[[[
[
119872119886
119909119887
119872119886
119910119887
119872119886
119911119887
]]]
]
= [
[
0
119872119910119887
+ 119870119872119910
119872119910119887
119872119911119887
+ 119870119872119911
119872119911119887
]
]
(15)
Remark 1 In fact each pulse jet can be fired only once so thelocation of the fired jet cannot provide force anymore Basedon this precondition elements of sets 119880
119910+
119865and 119880
119910+
119872will be
less and less over time In this paper quantity change of setsrsquoelements is not considered to simplify the problem
23 Attitude Control Model Some transformation and sim-plification are applied to themissile model for control designIt is assumed that themissilersquosmass is of a constant valueNotethat the goal is to establish the angle of attack and sideslipangle The attitude control model is given by
= 119903 + 119902 sin120572 tan120573 minus
119876119878 (119862120572
119910120572 + 119862
120575119911
119910120575119911) cos120572
119898119881 cos120573
minus
(119865119910119887
+ 119870119865119910
119865119910119887
) cos120572
119898119881 cos120573minus
119866119910 cos120572119898119881 cos120573
120573 = 119902 cos120572 +
(119876119878 (119862120573
119911120573 + 119862
120575119910
119911 120575119910) + 119865119911119887
+ 119870119865119911
119865119911119887
) cos120573
119898119881
+
(119876119878 (119862120572
119910120572 + 119862
120575119911
119910120575119911) + 119865119910
119887
+ 119870119865119910
119865119910119887
) sin120572 sin120573
119898119881
+119866119911 cos120573
119898119881+
119866119910 sin120572 sin120573
119898119881
119902 =119872119910119887
119869119910
+
119870119872119910
119872119910119887
119869119910
+
119876119878119871119898120573
119910120573
119869119910
+119876119878119871119898
120575119910
119910 120575119910
119869119910
+
119876119878119871119898119902
119910119902
119869119910
119903 =119872119911119887
119869119911
+119870119872119911
119872119911119887
119869119911
+119876119878119871119898
120572
119911120572
119869119911
+119876119878119871119898
120575119911
119911120575119911
119869119911
+119876119878119871119898
119903
119911119903
119869119911
(16)
where 119898120573
119910 119898120575119911
119910 119898119902
119910 119898120572
119911 119898120575119911
119911 and 119898
119903
119911are aerodynamic
parameters
3 Mixed Logical Dynamical Model ofBlended Missile
31 Piecewise Affine Model of Blended Missile To simplifyanalysis the gravity term and the channel coupling term are
Table 1 Missilersquos overall parameters
Missilersquos takeoff mass [kg] 255Missilersquos full-length [m] 486Missilersquos diameter [m] 0317Distance between missile head and center ofmass [m] 2569
Moment of inertia 119869119909 119869119910 119869119911 [kgsdotm2] 303 3063 3063
Lateral force provided by individual jets [N] 2200Distance between jet ring center and centerof mass [m] 126
Range of angle of attack [rad] minus120587
6le 120572 le
120587
6
Range of pitch angular velocity [rads] minus5120587
3le 119903 le
5120587
3
Range of elevator deflection [rad] minus120587
6le 120575119911 le
120587
6
ignoredWith (16) themissile attitude control model of pitchchannel is
= 119903 minus
119876119878 (119862120572
119910120572 + 119862
120575119911
119910120575119911) cos120572
119898119881minus
(1 + 119870119865119910
) 119865119910119887
cos120572
119898119881
119903 =
(1 + 119870119872119911
) 119865119910119887
119897
119869119911
+119876119878119871119898
120572
119911120572
119869119911
+119876119878119871119898
120575119911
119911120575119911
119869119911
+119876119878119871119898
119903
119911119903
119869119911
(17)
Choose 119909 = [120572 119903]119879 as system state and 119906 = [120575119911 119865119910
119887
]119879 as
control input The considered output is 119910 = 120572 Then (17) canbe rewritten into the following state space form
= 119891 (119909) + 119892 (119909) 119906
119910 = [1 0] 119909
(18)
where
119891 (119909) =
[[[[
[
119903 minus
119876119878119862120572
119910120572 cos120572
119898119881
119876119878119871 (119898120572
119911120572 + 119898
119903
119911119903)
119869119911
]]]]
]
119892 (119909) =
[[[[[[
[
minus
119876119878119862120575119911
119910cos120572
119898119881minus
(1 + 119870119865119910
) cos120572
119898119881
119876119878119871119898120575119911
119911
119869119911
(1 + 119870119872119911
) 119897
119869119911
]]]]]]
]
(19)
The missile parameters are presented in Table 1Generally the aerodynamic coefficients 119862
120572
119910 119862120575119911
119910 119898120572
119911
and 119898120575119911
119911and the amplification factors 119870119865
119910
119870119872119911
are mainlyaffected by the flight velocity 119881 and the angle of attack 120572
[11 12] Since the terminal guidance phase is consideredin this paper the flight time is quite short and the flightvelocity of the missile can be treated as a constant Thusthe aerodynamic coefficients and the amplification factors are
6 International Journal of Aerospace Engineering
mainly affected by the angle of attack 120572 The relationshipsbetween them are shown in Figure 5
In practical application since 120572 is the main factor thatleads to system nonlinearities the system model is usuallylinearized if 120572 varies in small range As seen from Figure 5curves of the relation between aerodynamic parametersand angle of attack can be expressed by six line segmentsapproximately Here we choose 120572 = minus037 rad minus0153 rad0 0153 rad and 037 rad as the operation points and dividethe whole operation region into six subregions As a resultthe original model (17) can be converted to the followingpiecewise affine models
=
1198861119909 + 1198871119906 + 1198901 [1 0] 119909 le minus037
1198862119909 + 1198872119906 + 1198902 minus037 lt [1 0] 119909 le minus0153
1198863119909 + 1198873119906 + 1198903 minus0153 lt [1 0] 119909 le 0
1198864119909 + 1198874119906 + 1198904 0 lt [1 0] 119909 le 0153
1198865119909 + 1198875119906 + 1198905 0153 lt [1 0] 119909 le 037
1198866119909 + 1198876119906 + 1198906 [1 0] 119909 gt 037
(20)
119910 = [1 0] 119909 (21)
where
119886119894 =120597119891(119909)
120597119909
10038161003816100381610038161003816100381610038161003816119909=1199091198940
= [11988611
11989411988612
119894
11988621
11989411988622
119894
]
119887119894 = 119892 (1199091198940) = [11988711
11989411988712
119894
11988721
11989411988722
119894
] 119890119894 = [1198901
119894
1198902
119894
]
11988611
119894=
1205971198911 (119909)
120597120572
10038161003816100381610038161003816100381610038161003816119909=1199091198940
= minus119876119878
119898119881(
120597119862120572
119910
120597120572
1003816100381610038161003816100381610038161003816100381610038161003816120572=1205721198940
1205721198940 cos1205721198940 + 119862120572
119910(1205721198940) cos1205721198940
minus 119862120572
119910(1205721198940) 1205721198940 sin1205721198940)
11988612
119894=
1205971198911(119909)
120597119903
10038161003816100381610038161003816100381610038161003816119909=1199091198940
= 1
11988621
119894=
1205971198912 (119909)
120597120572
10038161003816100381610038161003816100381610038161003816119909=1199091198940
=119876119878119871
119869119911
(120597119898120572
119911
120597120572
100381610038161003816100381610038161003816100381610038161003816120572=1205721198940
1205721198940 + 119898120572
119911(1205721198940) +
120597119898119903
119911
120597120572
100381610038161003816100381610038161003816100381610038161003816120572=1205721198940
1199031198940)
11988622
119894=
1205971198912(119909)
120597119903
10038161003816100381610038161003816100381610038161003816119909=1199091198940
=119876119878119871
119869119911
119898120572
119911(1205721198940)
11988711
119894= minus
119876119878119862120575119911
119910(1205721198940) cos1205721198940119898119881
11988712
119894= minus
(1 + 119870119865119910
(1205721198940)) cos1205721198940119898119881
11988721
119894=
119876119878119871119898120575119911
119911(1205721198940)
119869119911
11988722
119894=
(1 + 119870119872119911
(1205721198940)) 119897
119869119911
1198901
119894= 11988611
1198941205721198940 + 119886
12
1198941199031198940
1198902
119894= 11988621
1198941205721198940 + 119886
22
1198941199031198940
(22)
where 119894 (119894 = 1 2 6) is the label corresponding to the 119894thregion
From Table 1 and Figure 5 we get the set of aerodynamicparameters at the point (119867119881) = (20 km 1000ms) as shownin Table 2
Choose the sampling period 119879119904 = 0025 s The discretestate-space expression is then given by
119909 (119896 + 1)
=
1198861119909 (119896) + 1119906 (119896) + 1198901 [1 0] 119909 (119896) le minus037
1198862119909 (119896) + 2119906 (119896) + 1198902 minus037 lt [1 0] 119909 (119896) le minus0153
1198863119909 (119896) + 3119906 (119896) + 1198903 minus0153 lt [1 0] 119909 (119896) le 0
1198864119909 (119896) + 4119906 (119896) + 1198904 0 lt [1 0] 119909 (119896) le 0153
1198865119909 (119896) + 5119906 (119896) + 1198905 0153 lt [1 0] 119909 (119896) le 037
1198866119909 (119896) + 6119906 (119896) + 1198906 [1 0] 119909 (119896) gt 037
(23)
119910 (119896) = [1 0] 119909 (119896) (24)
where
1198861 = [104 0025
022 0995] 1198862 = [
1051 0025
0218 0995]
1198863 = [1023 00252
0248 09951] 1198864 = [
09954 00248
02732 09954]
1198865 = [09697 00245
02913 09956] 1198866 = [
09594 00244
03137 09959]
1198901 = [minus00183
minus01123] 1198902 = [
minus00175
minus00792]
1198903 = [minus00131
minus00376] 1198904 = [
0
0]
1198905 = [minus00053
00454] 1198906 = [
minus00169
01193]
1 = [minus0028 159 times 10
minus6
minus2166 142 times 10minus4]
2 = [minus003 218 times 10
minus6
minus2224 187 times 10minus4]
International Journal of Aerospace Engineering 7
2
15
1
05
0
minus05
minus1
minus15minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (Q
SmV
)C120572 y
(a) Relation between 119862120572119910and 120572
0092
009
0088
0086
0084
0082
008
0078
0076
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (Q
SmV
)C120575119911y
(b) Relation between 119862120575119911119910 and 120572
125
12
115
11
105
10
95
9minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (Q
SLJz)m
120572 z
(c) Relation between119898120572119911and 120572
96
94
92
90
88
86
84minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (minusQSL
Jz)m
120575119911z
(d) Relation between119898120575119911119911 and 120572
1
09
08
07
06
05
04
03
02
01
Am
plifi
catio
n fa
ctorKF
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
(e) Relation between119870119865119910
and 120572
12
11
1
09
08
07
06
05
04
03
Am
plifi
catio
n fa
ctorKM119911
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
(f) Relation between119870119872119911
and 120572
Figure 5 Aerodynamic parameters as functions of angle of attack
8 International Journal of Aerospace Engineering
Table 2 Aerodynamic parameters of pitch channel
Aerodynamic parameter 119876119878119862120572
119910119898119881 119876119878119862
120575119911
119910119898119881 119876119878119871119898
120572
119911119869119911
119876119878119871119898119903
119911119869119911
119876119878119871119898120575119911
119911119869119911
120572 = minus053 minus1175 0076 947 minus032 minus8489
120572 = minus037 minus0944 0082 973 minus032 minus8924
120572 = minus0153 minus023 0082 1043 minus032 minus8938
120572 = 0 036 009 1101 minus032 minus9510
120572 = 0153 094 0082 1158 minus032 minus8934
120572 = 037 163 0082 1224 minus032 minus8918
3 = [minus003 268 times 10
minus6
minus2228 223 times 10minus4]
4 = [minus0032 277 times 10
minus6
minus2371 232 times 10minus4]
5 = [minus003 227 times 10
minus6
minus2228 198 times 10minus4]
6 = [minus0029 191 times 10
minus6
minus2224 173 times 10minus4]
(25)
32 Constraints Analysis Due to the symmetry of jet config-uration the set of possible negative pitch control force is givenby
119880119910minus
119865= minus119865119898 minus2119865119898 cos
120587
9 minus2119865119898 cos
120587
18 minus2119865119898 minus4119865119898 cos
120587
9
minus4119865119898 cos120587
18
(26)
By combining (13) and (26) we obtain the set of allpossible pitch control force
119880119910
119865= 119865119898 2119865119898 cos
120587
9 2119865119898 cos
120587
18 2119865119898 4119865119898 cos
120587
9
4119865119898 cos120587
18 minus119865119898 minus2119865119898 cos
120587
9 minus2119865119898 cos
120587
18 minus2119865119898
minus4119865119898 cos120587
9 minus4119865119898 cos
120587
18
(27)
Substituting the jet parameters shown in Table 1 into theforegoing set yields
119880119910
119865= 2200 4135 4333 4400 8269 8666 minus2200 minus4135
minus4333 minus4400 minus8269 minus8666
(28)
Noting that the lateral forces are discrete variable we willutilize the linear combination of logical variables to describethe lateral force In terms of piecewise affine model (20) we
introduce logical variables 120575119865119894
isin 0 1 119894 = 1 2 12 toexpress the lateral thrust 119865119910
119887
119865119910119887
= 22001205751198651
+ 41351205751198652
+ 43331205751198653
+ 44001205751198654
+ 82691205751198655
+ 86661205751198656
minus 22001205751198657
minus 41351205751198658
minus 43331205751198659
minus 440012057511986510
minus 826912057511986511
minus 866612057511986512
(29)
In (29) the logical variables should satisfy the constraints
12
sum
119894=1
120575119865119894
= 0 or 1 (30)
where 0 means that no lateral force is generated while 1
means that the applied lateral force equals to one element ofset 119880119910119865
Denote 1199061 = 120575119911 the control input 119906 in model (23) can berewritten as
119906 = [1199061 119865119910119887
]119879 (31)
As shown in Table 1 the constraints on system states andcontrol input are
119909min le 119909 (119896) le 119909max
1199061min le 1199061 (119896) le 1199061max(32)
where 119909min = [minus053 minus522]119879 119909max = [053 522]
119879 1199061min =
minus053 1199061max = 053According to (30) we have
12
sum
119894=1
120575119865119894
le 1 (33)
which shows the constraint on the logical control inputUse logical variables 120575119894(119896) isin 0 1 119894 = 1 2 5 to
describe the operation points which satisfy the constraints
[1 0] 119909 (119896) + 037 le 0 lArrrArr 1205751 (119896) = 1
[1 0] 119909 (119896) + 0153 le 0 lArrrArr 1205752 (119896) = 1
[1 0] 119909 (119896) le 0 lArrrArr 1205753 (119896) = 1
[1 0] 119909 (119896) minus 0153 le 0 lArrrArr 1205754 (119896) = 1
[1 0] 119909 (119896) minus 037 le 0 lArrrArr 1205755 (119896) = 1
(34)
International Journal of Aerospace Engineering 9
Equation (34) can be transformed into the followingequivalent mixed logical inequalities [13]
[1 0] 119909 (119896) + 037 ge 120576 + (1198981 minus 120576) 1205751 (119896)
[1 0] 119909 (119896) + 037 le 1198721 (1 minus 1205751 (119896))
[1 0] 119909 (119896) + 0153 ge 120576 + (1198982 minus 120576) 1205752 (119896)
[1 0] 119909 (119896) + 0153 le 1198722 (1 minus 1205752 (119896))
[1 0] 119909 (119896) ge 120576 + (1198983 minus 120576) 1205753 (119896)
[1 0] 119909 (119896) le 1198723 (1 minus 1205753 (119896))
[1 0] 119909 (119896) minus 0153 ge 120576 + (1198984 minus 120576) 1205754 (119896)
[1 0] 119909 (119896) minus 0153 le 1198724 (1 minus 1205754 (119896))
[1 0] 119909 (119896) minus 037 ge 120576 + (1198985 minus 120576) 1205755 (119896)
[1 0] 119909 (119896) minus 037 le 1198725 (1 minus 1205755 (119896))
(35)
where 1198981 = minus016 1198721 = 090 1198982 = minus0377 1198722 = 06831198983 = minus053 1198723 = 053 1198984 = minus0683 1198724 = 0377 1198985 =
minus0901198725 = 016 and 120576 = 10minus6
In addition we introduce the auxiliary logical variables120575119894(119896) isin 0 1 119894 = 6 9 as follows
1205756 (119896) = (1 minus 1205751 (119896)) 1205752 (119896)
1205757 (119896) = (1 minus 1205752 (119896)) 1205753 (119896)
1205758 (119896) = (1 minus 1205753 (119896)) 1205754 (119896)
1205759 (119896) = (1 minus 1205754 (119896)) 1205755 (119896)
(36)
With 1205751 1205756 1205757 1205758 1205759 and 1 minus 1205755 the six regions canbe presented Similarly (36) can be transformed into theequivalent mixed logical inequalities
minus1205751 (119896) + 1205752 (119896) minus 1205756 (119896) le 0
1205751 (119896) + 1205756 (119896) le 1
minus1205752 (119896) + 1205756 (119896) le 0
minus1205752 (119896) + 1205753 (119896) minus 1205757 (119896) le 0
1205752 (119896) + 1205757 (119896) le 1
minus1205753 (119896) + 1205757 (119896) le 0
minus1205753 (119896) + 1205754 (119896) minus 1205758 (119896) le 0
1205753 (119896) + 1205758 (119896) le 1
minus1205754 (119896) + 1205758 (119896) le 0
minus1205754 (119896) + 1205755 (119896) minus 1205759 (119896) le 0
1205754 (119896) + 1205759 (119896) le 1
minus1205755 (119896) + 1205759 (119896) le 0
(37)
To describe the state space model of each region weintroduce the following auxiliary continuous variables
1199111 (119896) = (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) 1205751 (119896)
1199112 (119896) = (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) 1205756 (119896)
1199113 (119896) = (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) 1205757 (119896)
1199114 (119896) = (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) 1205758 (119896)
1199115 (119896) = (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) 1205759 (119896)
1199116 (119896) = (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) (1 minus 1205755 (119896))
(38)
Equation (38) can be converted to the equivalent mixedlogical inequalities
1199111 (119896) ge (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) minus 1198721198911 (1 minus 1205751 (119896))
1199111 (119896) le (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) minus 1198981198911 (1 minus 1205751 (119896))
1199111 (119896) ge 11989811989111205751 (119896)
1199111 (119896) le 11987211989111205751 (119896)
1199112 (119896) ge (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) minus 1198721198912 (1 minus 1205756 (119896))
1199112 (119896) le (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) minus 1198981198912 (1 minus 1205756 (119896))
1199112 (119896) ge 11989811989121205756 (119896)
1199112 (119896) le 11987211989121205756 (119896)
1199113 (119896) ge (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) minus 1198721198913 (1 minus 1205757 (119896))
1199113 (119896) le (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) minus 1198981198913 (1 minus 1205757 (119896))
1199113 (119896) ge 11989811989131205757 (119896)
1199113 (119896) le 11987211989131205757 (119896)
1199114 (119896) ge (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) minus 1198721198914 (1 minus 1205758 (119896))
1199114 (119896) le (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) minus 1198981198914 (1 minus 1205758 (119896))
1199114 (119896) ge 11989811989141205758 (119896)
1199114 (119896) le 11987211989141205758 (119896)
1199115 (119896) ge (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) minus 1198721198915 (1 minus 1205759 (119896))
1199115 (119896) le (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) minus 1198981198915 (1 minus 1205759 (119896))
10 International Journal of Aerospace Engineering
1199115 (119896) ge 11989811989151205759 (119896)
1199115 (119896) le 11987211989151205759 (119896)
1199116 (119896) ge (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) minus 11987211989151205755 (119896)
1199116 (119896) le (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) minus 11989811989151205755 (119896)
1199116 (119896) ge 1198981198916 (1 minus 1205755 (119896))
1199116 (119896) le 1198721198916 (1 minus 1205755 (119896))
(39)
where1198721198911 = [073 1084]1198791198981198911 = [minus077 minus1106]
1198791198721198912 =[076 1166]
119879 1198981198912 = [minus079 minus 1256]119879 1198721198913 =
[077 1273]119879 1198981198913 = [minus078 minus 1280]
119879 1198721198914 =
[076 1403]119879 1198981198914 = [minus076 minus 1403]
119879 1198721198915 =
[0725 1291]119879 1198981198915 = [minus0736 minus 1205]
119879 1198721198916 =
[0696 1154]119879 and1198981198916 = [minus073 minus 1130]
119879Then the whole MLD model of the missile is given by
119909 (119896 + 1) =
6
sum
119894=1
119911119894 (119896)
119910 (119896) = [1 0] 119909 (119896)
st (28) (30) (32) (34) (36) (38)
(40)
where (29) (31) (33) (35) (37) and (39) represent all theconstraint inequalities
4 Autopilot Design UsingHybrid MPC Method
In general we expect that the output 119910 tracks its command 119910119888
as fast as possible with a small amount of fuel consumptionMotivated by this observation we consider the followingoptimization problem
119869lowast
= min119906(119896)119906(119896+1)120575(119896)120575(119896+1|119896)119911(119896)119911(119896+1|119896)
119873
sum
119894=1
(1003817100381710038171003817119910 (119896 + 119894 | 119896)
minus119910119888 (119896 + 119894)1003817100381710038171003817
2
119876
+ 119906(119896 + 119894)2
119877)
st MLD model (39)
1199061min le 1199061 (119896) 1199061 (119896 + 1) le 1199061max
119909min le 119909 (119896) 119909 (119896 + 1) le 119909max
(41)
where 119910119888 is the command for angle of attack 119910(119896 + 119894 | 119896) ispredictive value of angle of attack 119873 denotes the predictivehorizon 119876 and 119877 are the weighting matrices and 119877 =
diag(119877120575119911
119877119865119910
) 119877120575119911
119877119865119910
are weighted coefficients of aerody-namic control surfaces and lateral pulse jets respectivelyThe
ratio of 119877120575119911
and 119877119865119910
represents the control allocation betweenaerodynamic control surfaces and lateral pulse jets When119877119865119910
119877120575119911
is increased the requirement for lateral force will bedeclined that is the fuel consumption can be lessened Inaddition the deduction can be verified from the simulationresults of Case 1 and Case 2
Different control allocation between the dual actuators(aerodynamic control surfaces and lateral pulse jets) can beobtained by setting different 119876 and 119877 Since both logicaland continuous variables are involved in (41) the aboveon-line optimization problem is a mixed integer quadraticprogramming (MIQP) problemwhich can be solved by usingthe hybrid MPC toolbox of MATLAB [14 15]
Remark 2 In an explicit MPC controller the main factorsaffecting the number of subregions include the systemdimen-sion the predictive horizon and the number of constrains Inthis paper the blendedmissile with aerodynamic control sur-faces and lateral jets is investigated To deal with the discreteproperty of the lateral jet forces some logical variables areintroduced for MPC controller design which increases thenumber of subregions inevitably
5 Numerical Simulations
51 Case 1 Numerical simulations are performed to ver-ify the feasibility of the proposed method in this sectionThe involved parameters are given in Table 1 The weightmatrices are set as 119876 = 10 119877120575
119911
= 0025 and 119877119865119910
=
diag(0005 0005 0005) Suppose the initial state is 1205720 =0 1199030 = 0 In order to avoid excessive computational load wechoose predictive horizon119873 = 2 and control horizon119872 = 2The command for angle of attack is 120572119888 = 02 rad
Explicit form of the optimal controller is provided byhybrid toolbox which is not given here for simplicity Insteadwe present the partition results associated with the controllerin Figure 6 where 4190 subregions are obtained and for eachsubregion a control law of the form 119906 = 119870119909 + 119887 is givenAs a benefit of using explicit MPC the controller parameters119870 and 119887 for all the subregions are obtained simultaneouslyonce the optimization problem is solved This property isobviously different from that of gain-scheduled controller(where the controller parameters for different regions areseparately determined)
However by a simple calculation we conclude that thesesubregions donot require toomuch storage space (the neededstorage space is approximately 14 times 8 times 4190 = 450KB)Moreover it should be noted that when the algorithm isimplemented in practice much more time will be needed toidentify which subregion the current states enter into This isanother important factor that affects the computational costof the proposed algorithm
The simulation results are shown in Figures 7ndash9 It isseen from Figure 7 that the actual angle of attack tracksthe command in less than 01 seconds As shown in Figures8 and 9 the aerodynamic force converges to a constant astime increases while the jets are only activated during thebeginning period (when the tracking error is obvious)
International Journal of Aerospace Engineering 11
58
68
73
108
174
180
245
252
254
270
271
272
273
274
276
277
299
300
301
302
06
04
02
0
minus02
minus04
Elev
ator
defl
ectio
n (r
ad)
Angle of attack (rad)minus04 minus02 0 02 04 06
1634
1635
1638
1648
1649
1650
1664
1673
1677
1678
1679
1712
1726
1743
1744
1746
1748
1751
1752
1983
1985
1993
2011
Late
ral f
orce
(N)
Angle of attack (rad)minus04 minus02 0 02 04 06
1000
800
600
400
200
0
minus200
minus400
minus600
minus800
minus1000
Polyhedral partitionmdash4190 regions Polyhedral partitionmdash4190 regions
Figure 6 The partition associated with the explicit controller
025
02
015
01
005
0
ActualCommand
0 02 04 06 08 1
Time (s)
Ang
le o
f atta
ck (r
ad)
Figure 7 The response of angle of attack
52 Case 2 The results for the case with a different weight119877120575119911
= 0005 are shown in Figures 10ndash12 It is seen that adifferent control allocation result is obtained
04
02
0
minus02
minus04
minus060 02 04 06 08 1
Time (s)
Elev
ator
defl
ectio
n (r
ad)
Figure 8 The response of elevator deflection
53 Case 3 In this case a different command 120572119888 =
02 cos(05120587119905) rad is considered and the weight matrices arethe same as the ones for Case 1 The simulation results areshown in Figures 13ndash15
It is seen from Figure 13 that asymptotic tracking is alsoachievedThemethod proposed in this paper can realize both
12 International Journal of Aerospace Engineering
1
05
0
minus05
minus1
times104
0 02 04 06 08 1
Time (s)
Late
ral f
orce
(N)
Figure 9 The response of lateral force
025
02
015
01
005
0
Ang
le o
f atta
ck (r
ad)
0 02 04 06 08 1
Time (s)
ActualCommand
Figure 10 The response of angle of attack
06
04
02
0
minus02
minus04
minus06
minus08
Elev
ator
defl
ectio
n (r
ad)
0 02 04 06 08 1
Time (s)
Figure 11 The response of elevator deflection
1
05
0
minus05
minus1
Late
ral f
orce
(N)
times104
0 02 04 06 08 1
Time (s)
Figure 12 The response of lateral force
03
025
02
015
01
005
0
minus005
minus01
minus015
minus02
Ang
le o
f atta
ck (r
ad)
0 05 1 15 2 25 3 35 4
Time (s)
ActualCommand
Figure 13 The response of angle of attack
06
04
02
0
minus02
minus04
minus06
minus08
Elev
ator
defl
ectio
n (r
ad)
0 05 1 15 2 25 3 35 4
Time (s)
Figure 14 The response of elevator deflection
International Journal of Aerospace Engineering 13
1
08
06
04
02
0
minus02
minus04
minus06
minus08
minus1
Late
ral f
orce
(N)
0 05 1 15 2 25 3 35 4
Time (s)
times104
Figure 15 The response of lateral force
fast tracking command and control allocation It is seen fromFigure 15 that the jets are activated while the tracking erroris obvious or command is varying rapidly
6 Conclusion
An autopilot design method for a missile with aerodynamiccontrol surfaces and lateral jets is presented in this paperThe nonlinear attitude control model is reduced to an MLDmodel Meanwhile the lateral force is described as linearcombination of logical variables due to the discrete values oflateral force Then the whole MLD model of attitude controlsystem is derived Autopilot design is accomplished usinghybrid MPC method By setting the related weighted coeffi-cients in index function the control allocation is obtainedMoreover numerical simulations are performed under thedifferent conditions the performance of tracking the attitudecommand and control allocation is verified and the explicitform of the control law can be obtained as well
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research presented in this document is supportedby the National Natural Science Foundation of Chinaunder Grant nos 61104193 61203191 and 61333001 theFundamental Research Funds for the Central Universities(HITNSRIF2012032) the Program for IBRSEM in HarbinInstitute of Technology under Grant HITIBRSEMA201415and the Foundation of Supporting Technology for Aerospaceunder Grant 2014-HT-HGD7
References
[1] R Hirokawa K Sato and S Manabe ldquoAutopilot design fora missile with reaction-jet using coefficient diagram methodrdquoin Proceedings of the AIAA Guidance Navigation and ControlConference and Exhibit 2001 August 2001
[2] P K Menon and V R Iragavarapu Adaptive Techniques forMultiple Actuator Blending Defense Technical InformationCenter 1998
[3] A G Munson and M W Garbrick ldquoJet interaction investiga-tionrdquo Report OR-9933 Martin Marietta Orlando Fla USA1969
[4] M Graham and P Weinacht ldquoNumerical simulation of lateralcontrol jetsrdquo in Proceedings of the 37th Aerospace SciencesMeeting and Exhibit 1999 AIAA Paper
[5] J S Shamma and J R Cloutier ldquoGain-scheduledmissile autopi-lot design using linear parameter varying transformationsrdquoJournal of Guidance Control and Dynamics vol 16 no 2 pp256ndash263 1993
[6] M Innocenti and A Thukral ldquoSimultaneous reaction jet andaerodynamic control of missile systemsrdquo AlAA 93-3739-CP1993
[7] D B Ridgely Y Lee and T Fanciullo ldquoDual aeropropulsivemissile control-optimal control and control allocationrdquo inProceedings of the AIAA Guidance Navigation and ControlConference and Exhibit Keystone Colo USA 2006
[8] D B Ridgely D Drake L Triplett and C Geise ldquoDynamiccontrol allocation of a missile with tails and reaction jetsrdquo inProceedings of the AIAA Guidance Navigation and ControlConference pp 3158ndash3189 August 2007
[9] D Q Mayne J B Rawlings C V Rao and P O ScokaertldquoConstrained model predictive control stability and optimal-ityrdquo Automatica vol 36 no 6 pp 789ndash814 2000
[10] A Bemporad F Borrelli and M Morari ldquoModel predictivecontrol based on linear programmingmdashthe explicit solutionrdquoIEEE Transactions on Automatic Control vol 47 no 12 pp1974ndash1985 2002
[11] C Jouannet and P Krus ldquoModelling of high angle of attackaerodynamicrdquo in Proceedings of the 25th AIAA Applied Aerody-namics Conference pp 1481ndash1516 June 2007
[12] S Venugopal and M Krishnamurthy ldquoMissile aerodynamics athigh angles of attack a prediction coderdquo Journal of Spacecraftand Rockets vol 32 no 2 pp 263ndash269 1995
[13] A Bemporad ldquoEfficient conversion of mixed logical dynamicalsystems into an equivalent piecewise affine formrdquo IEEE Trans-actions on Automatic Control vol 49 no 5 pp 832ndash838 2004
[14] F D Torrisi andA Bemporad ldquoHYSDELmdasha tool for generatingcomputational hybrid models for analysis and synthesis prob-lemsrdquo IEEE Transactions on Control Systems Technology vol 12no 2 pp 235ndash249 2004
[15] A Bemporad W P M H Heemels and B De SchutterldquoOn hybrid systems and closed-loop MPC systemsrdquo IEEETransactions on Automatic Control vol 47 no 5 pp 863ndash8692002
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 3
12
3
4
5
6
7
8
910
11
12
13
14
15
16
17
18
yb
zb
(a) Odd-numbered rings
1
2
3
4
5
6
7
8
91011
12
13
14
15
16
17
18
yb
zb
(b) Even-numbered rings
Figure 2 The layout scheme of lateral pulse jets
where
119894lowast= 2 119894 is odd
119894lowast= 1 119894 is even
(6)
For the situation where all pulse jets are fired at the sametime the total force and moment are given by
[
[
119865119909119887
119865119910119887
119865119911119887
]
]
=
[[[[[[[[[[
[
0
119894=10
sum
119894=1
119895=18
sum
119895=1
119865119894119895
119910119887
119894=10
sum
119894=1
119895=18
sum
119895=1
119865119894119895
119911119887
]]]]]]]]]]
]
[
[
119872119909119887
119872119910119887
119872119911119887
]
]
=
[[[[[[[[[[
[
0
minus
119894=10
sum
119894=1
119895=18
sum
119895=1
119865119894119895
119911119887
119897119894
119894=10
sum
119894=1
119895=18
sum
119895=1
119865119894119895
119910119887
119897119894
]]]]]]]]]]
]
(7)
In order to avoid the coupling between the pitch momentand yaw moment each ring is divided into four controlregions positive pitch negative pitch positive yaw andnegative yaw control region as shown in Figure 4
The autopilot design of PAC-3 is more complicated thanthat of other conventional missiles which are controlled
12
88
99
1010
1111
1212
xb
zb
i
lil1
Δl
middot middot middotmiddot middot middot
O
Figure 3 The ring frames expansion of lateral pulse jets
only by aerodynamic surfaces due to the hybrid propertyof control inputs and the on-off property of pulse jet (thepulse jet can be fired only one time) To deal with thisproblem the work [7] proposed two-step design procedures(1) in the first step neglect the hybrid property (or on-offproperty) and design the expected force andmoment signals(2) in the other step the fire logic is derived by solving theretaliation problem of these signals with taking into accountthe hybrid property (or on-off property) Different fromthe above traditional procedures a novel procedure will bepresented in what follows where only one step is included Inpractical applications only a small number of jets (in a certainof rings) are activated over a finite time interval To make theidea of the following development clear we here consider asimple but representative situation where no more than two
4 International Journal of Aerospace Engineering
yb
zb
Negative pitchcontrol region
Negative yawcontrol region
Positive pitchcontrol region
Positive yawcontrol region
17
8
910
11
12
12
3
4
5
6
713
14
15
16
18
(a) Odd-numbered rings
1
2
3
4
5
6
7
8
910
11
12
13
14
15
16
17
18
yb
zb
Negative pitchcontrol region
Negative yawcontrol region
Positive pitchcontrol region
Positive yawcontrol region
(b) Even-numbered rings
Figure 4 Schematic of control regions
rings are allowed to be fired simultaneously and no morethan two jets are activated in each fired ring Meanwhile itshould be ensured that only odd rings or even rings are firedand the jets are fired symmetrically about the correspondingsymmetry axis of each control region
Take the positive pitch control region as an example Theforces provided by the jets (119894 1) (119894 2) (119894 3) (119894 17) and (119894 18)
in an odd ring are given by
119865119900 = [119865119898 119865119898 cos120587
9119865119898 cos
2120587
9119865119898 cos
2120587
9119865119898 cos
120587
9]
119879
(8)
Similarly the forces provided by the jets (119894 1) (119894 2) (119894 17)and (119894 18) in an even ring are given by
119865119890 = [119865119898 cos120587
18119865119898 cos
120587
6119865119898 cos
120587
6119865119898 cos
120587
18]
119879
(9)
where119865119900 and119865119890 denote the forces associated with an odd ringand an even ring respectively
Use 119865119894 to denote the lateral force generated by ring 119894
Clearly 119865119894 should satisfy the condition
1198651= 1198659 119865
3= 1198657 119865
2= 11986510 119865
4= 1198658 (10)
When odd ring is fired the lateral force and moment aregiven by
119865119910119887
isin 119865119898 2119865119898 cos120587
9 2119865119898 cos
2120587
9 2119865119898 4119865119898 cos
120587
9
4119865119898 cos2120587
9
119872119911119887
isin 1198651198981198975 21198651198981198975 cos120587
9 21198651198981198975 cos
2120587
9 21198651198981198975
41198651198981198975 cos120587
9 41198651198981198975 cos
2120587
9
(11)
While even ring is fired the lateral force and moment aregiven by
119865119910119887
isin 2119865119898 cos120587
18 2119865119898 cos
120587
6 4119865119898 cos
120587
18 4119865119898 cos
120587
6
119872119911119887
isin 21198651198981198976 cos120587
18 21198651198981198976 cos
120587
6 41198651198981198976 cos
120587
18
41198651198981198976 cos120587
6
(12)
Noting Δ119897 is quite small we consider 1198975 ≃ 1198976 = 119897 Inorder to ensure that the jets fire efficiency the jets resultingin small moment components along 119911119887 axis are not activatedAs a result the sets of forces and moments are respectivelygiven by
119880119910+
119865= 119865119898 2119865119898 cos
120587
9 2119865119898 cos
120587
18 2119865119898 4119865119898 cos
120587
9
4119865119898 cos120587
18
(13)
119880119910+
119872= 119865119898119897 2119865119898119897 cos
120587
9 2119865119898119897 cos
120587
18 2119865119898119897 4119865119898119897 cos
120587
9
4119865119898119897 cos120587
18
(14)
where 119865119910119887
isin 119880119910+
119865and119872119911
119887
isin 119880119910+
119872 During each control period
a control moment belonging to119880119910+
119872will be used as the input
The mutual interference between high-speed jet streamand air leads to lateral jet interference effect In orderto take into account this interference force and moment
International Journal of Aerospace Engineering 5
amplification factors 119870119865119910
119870119865119911
119870119872119910
and 119870119872119911
are introducedas in [3 4]Then the resulting lateral forces andmoments are
[[[
[
119865119886
119909119887
119865119886
119910119887
119865119886
119911119887
]]]
]
= [
[
0
119865119910119887
+ 119870119865119910
119865119910119887
119865119911119887
+ 119870119865119911
119865119911119887
]
]
[[[
[
119872119886
119909119887
119872119886
119910119887
119872119886
119911119887
]]]
]
= [
[
0
119872119910119887
+ 119870119872119910
119872119910119887
119872119911119887
+ 119870119872119911
119872119911119887
]
]
(15)
Remark 1 In fact each pulse jet can be fired only once so thelocation of the fired jet cannot provide force anymore Basedon this precondition elements of sets 119880
119910+
119865and 119880
119910+
119872will be
less and less over time In this paper quantity change of setsrsquoelements is not considered to simplify the problem
23 Attitude Control Model Some transformation and sim-plification are applied to themissile model for control designIt is assumed that themissilersquosmass is of a constant valueNotethat the goal is to establish the angle of attack and sideslipangle The attitude control model is given by
= 119903 + 119902 sin120572 tan120573 minus
119876119878 (119862120572
119910120572 + 119862
120575119911
119910120575119911) cos120572
119898119881 cos120573
minus
(119865119910119887
+ 119870119865119910
119865119910119887
) cos120572
119898119881 cos120573minus
119866119910 cos120572119898119881 cos120573
120573 = 119902 cos120572 +
(119876119878 (119862120573
119911120573 + 119862
120575119910
119911 120575119910) + 119865119911119887
+ 119870119865119911
119865119911119887
) cos120573
119898119881
+
(119876119878 (119862120572
119910120572 + 119862
120575119911
119910120575119911) + 119865119910
119887
+ 119870119865119910
119865119910119887
) sin120572 sin120573
119898119881
+119866119911 cos120573
119898119881+
119866119910 sin120572 sin120573
119898119881
119902 =119872119910119887
119869119910
+
119870119872119910
119872119910119887
119869119910
+
119876119878119871119898120573
119910120573
119869119910
+119876119878119871119898
120575119910
119910 120575119910
119869119910
+
119876119878119871119898119902
119910119902
119869119910
119903 =119872119911119887
119869119911
+119870119872119911
119872119911119887
119869119911
+119876119878119871119898
120572
119911120572
119869119911
+119876119878119871119898
120575119911
119911120575119911
119869119911
+119876119878119871119898
119903
119911119903
119869119911
(16)
where 119898120573
119910 119898120575119911
119910 119898119902
119910 119898120572
119911 119898120575119911
119911 and 119898
119903
119911are aerodynamic
parameters
3 Mixed Logical Dynamical Model ofBlended Missile
31 Piecewise Affine Model of Blended Missile To simplifyanalysis the gravity term and the channel coupling term are
Table 1 Missilersquos overall parameters
Missilersquos takeoff mass [kg] 255Missilersquos full-length [m] 486Missilersquos diameter [m] 0317Distance between missile head and center ofmass [m] 2569
Moment of inertia 119869119909 119869119910 119869119911 [kgsdotm2] 303 3063 3063
Lateral force provided by individual jets [N] 2200Distance between jet ring center and centerof mass [m] 126
Range of angle of attack [rad] minus120587
6le 120572 le
120587
6
Range of pitch angular velocity [rads] minus5120587
3le 119903 le
5120587
3
Range of elevator deflection [rad] minus120587
6le 120575119911 le
120587
6
ignoredWith (16) themissile attitude control model of pitchchannel is
= 119903 minus
119876119878 (119862120572
119910120572 + 119862
120575119911
119910120575119911) cos120572
119898119881minus
(1 + 119870119865119910
) 119865119910119887
cos120572
119898119881
119903 =
(1 + 119870119872119911
) 119865119910119887
119897
119869119911
+119876119878119871119898
120572
119911120572
119869119911
+119876119878119871119898
120575119911
119911120575119911
119869119911
+119876119878119871119898
119903
119911119903
119869119911
(17)
Choose 119909 = [120572 119903]119879 as system state and 119906 = [120575119911 119865119910
119887
]119879 as
control input The considered output is 119910 = 120572 Then (17) canbe rewritten into the following state space form
= 119891 (119909) + 119892 (119909) 119906
119910 = [1 0] 119909
(18)
where
119891 (119909) =
[[[[
[
119903 minus
119876119878119862120572
119910120572 cos120572
119898119881
119876119878119871 (119898120572
119911120572 + 119898
119903
119911119903)
119869119911
]]]]
]
119892 (119909) =
[[[[[[
[
minus
119876119878119862120575119911
119910cos120572
119898119881minus
(1 + 119870119865119910
) cos120572
119898119881
119876119878119871119898120575119911
119911
119869119911
(1 + 119870119872119911
) 119897
119869119911
]]]]]]
]
(19)
The missile parameters are presented in Table 1Generally the aerodynamic coefficients 119862
120572
119910 119862120575119911
119910 119898120572
119911
and 119898120575119911
119911and the amplification factors 119870119865
119910
119870119872119911
are mainlyaffected by the flight velocity 119881 and the angle of attack 120572
[11 12] Since the terminal guidance phase is consideredin this paper the flight time is quite short and the flightvelocity of the missile can be treated as a constant Thusthe aerodynamic coefficients and the amplification factors are
6 International Journal of Aerospace Engineering
mainly affected by the angle of attack 120572 The relationshipsbetween them are shown in Figure 5
In practical application since 120572 is the main factor thatleads to system nonlinearities the system model is usuallylinearized if 120572 varies in small range As seen from Figure 5curves of the relation between aerodynamic parametersand angle of attack can be expressed by six line segmentsapproximately Here we choose 120572 = minus037 rad minus0153 rad0 0153 rad and 037 rad as the operation points and dividethe whole operation region into six subregions As a resultthe original model (17) can be converted to the followingpiecewise affine models
=
1198861119909 + 1198871119906 + 1198901 [1 0] 119909 le minus037
1198862119909 + 1198872119906 + 1198902 minus037 lt [1 0] 119909 le minus0153
1198863119909 + 1198873119906 + 1198903 minus0153 lt [1 0] 119909 le 0
1198864119909 + 1198874119906 + 1198904 0 lt [1 0] 119909 le 0153
1198865119909 + 1198875119906 + 1198905 0153 lt [1 0] 119909 le 037
1198866119909 + 1198876119906 + 1198906 [1 0] 119909 gt 037
(20)
119910 = [1 0] 119909 (21)
where
119886119894 =120597119891(119909)
120597119909
10038161003816100381610038161003816100381610038161003816119909=1199091198940
= [11988611
11989411988612
119894
11988621
11989411988622
119894
]
119887119894 = 119892 (1199091198940) = [11988711
11989411988712
119894
11988721
11989411988722
119894
] 119890119894 = [1198901
119894
1198902
119894
]
11988611
119894=
1205971198911 (119909)
120597120572
10038161003816100381610038161003816100381610038161003816119909=1199091198940
= minus119876119878
119898119881(
120597119862120572
119910
120597120572
1003816100381610038161003816100381610038161003816100381610038161003816120572=1205721198940
1205721198940 cos1205721198940 + 119862120572
119910(1205721198940) cos1205721198940
minus 119862120572
119910(1205721198940) 1205721198940 sin1205721198940)
11988612
119894=
1205971198911(119909)
120597119903
10038161003816100381610038161003816100381610038161003816119909=1199091198940
= 1
11988621
119894=
1205971198912 (119909)
120597120572
10038161003816100381610038161003816100381610038161003816119909=1199091198940
=119876119878119871
119869119911
(120597119898120572
119911
120597120572
100381610038161003816100381610038161003816100381610038161003816120572=1205721198940
1205721198940 + 119898120572
119911(1205721198940) +
120597119898119903
119911
120597120572
100381610038161003816100381610038161003816100381610038161003816120572=1205721198940
1199031198940)
11988622
119894=
1205971198912(119909)
120597119903
10038161003816100381610038161003816100381610038161003816119909=1199091198940
=119876119878119871
119869119911
119898120572
119911(1205721198940)
11988711
119894= minus
119876119878119862120575119911
119910(1205721198940) cos1205721198940119898119881
11988712
119894= minus
(1 + 119870119865119910
(1205721198940)) cos1205721198940119898119881
11988721
119894=
119876119878119871119898120575119911
119911(1205721198940)
119869119911
11988722
119894=
(1 + 119870119872119911
(1205721198940)) 119897
119869119911
1198901
119894= 11988611
1198941205721198940 + 119886
12
1198941199031198940
1198902
119894= 11988621
1198941205721198940 + 119886
22
1198941199031198940
(22)
where 119894 (119894 = 1 2 6) is the label corresponding to the 119894thregion
From Table 1 and Figure 5 we get the set of aerodynamicparameters at the point (119867119881) = (20 km 1000ms) as shownin Table 2
Choose the sampling period 119879119904 = 0025 s The discretestate-space expression is then given by
119909 (119896 + 1)
=
1198861119909 (119896) + 1119906 (119896) + 1198901 [1 0] 119909 (119896) le minus037
1198862119909 (119896) + 2119906 (119896) + 1198902 minus037 lt [1 0] 119909 (119896) le minus0153
1198863119909 (119896) + 3119906 (119896) + 1198903 minus0153 lt [1 0] 119909 (119896) le 0
1198864119909 (119896) + 4119906 (119896) + 1198904 0 lt [1 0] 119909 (119896) le 0153
1198865119909 (119896) + 5119906 (119896) + 1198905 0153 lt [1 0] 119909 (119896) le 037
1198866119909 (119896) + 6119906 (119896) + 1198906 [1 0] 119909 (119896) gt 037
(23)
119910 (119896) = [1 0] 119909 (119896) (24)
where
1198861 = [104 0025
022 0995] 1198862 = [
1051 0025
0218 0995]
1198863 = [1023 00252
0248 09951] 1198864 = [
09954 00248
02732 09954]
1198865 = [09697 00245
02913 09956] 1198866 = [
09594 00244
03137 09959]
1198901 = [minus00183
minus01123] 1198902 = [
minus00175
minus00792]
1198903 = [minus00131
minus00376] 1198904 = [
0
0]
1198905 = [minus00053
00454] 1198906 = [
minus00169
01193]
1 = [minus0028 159 times 10
minus6
minus2166 142 times 10minus4]
2 = [minus003 218 times 10
minus6
minus2224 187 times 10minus4]
International Journal of Aerospace Engineering 7
2
15
1
05
0
minus05
minus1
minus15minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (Q
SmV
)C120572 y
(a) Relation between 119862120572119910and 120572
0092
009
0088
0086
0084
0082
008
0078
0076
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (Q
SmV
)C120575119911y
(b) Relation between 119862120575119911119910 and 120572
125
12
115
11
105
10
95
9minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (Q
SLJz)m
120572 z
(c) Relation between119898120572119911and 120572
96
94
92
90
88
86
84minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (minusQSL
Jz)m
120575119911z
(d) Relation between119898120575119911119911 and 120572
1
09
08
07
06
05
04
03
02
01
Am
plifi
catio
n fa
ctorKF
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
(e) Relation between119870119865119910
and 120572
12
11
1
09
08
07
06
05
04
03
Am
plifi
catio
n fa
ctorKM119911
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
(f) Relation between119870119872119911
and 120572
Figure 5 Aerodynamic parameters as functions of angle of attack
8 International Journal of Aerospace Engineering
Table 2 Aerodynamic parameters of pitch channel
Aerodynamic parameter 119876119878119862120572
119910119898119881 119876119878119862
120575119911
119910119898119881 119876119878119871119898
120572
119911119869119911
119876119878119871119898119903
119911119869119911
119876119878119871119898120575119911
119911119869119911
120572 = minus053 minus1175 0076 947 minus032 minus8489
120572 = minus037 minus0944 0082 973 minus032 minus8924
120572 = minus0153 minus023 0082 1043 minus032 minus8938
120572 = 0 036 009 1101 minus032 minus9510
120572 = 0153 094 0082 1158 minus032 minus8934
120572 = 037 163 0082 1224 minus032 minus8918
3 = [minus003 268 times 10
minus6
minus2228 223 times 10minus4]
4 = [minus0032 277 times 10
minus6
minus2371 232 times 10minus4]
5 = [minus003 227 times 10
minus6
minus2228 198 times 10minus4]
6 = [minus0029 191 times 10
minus6
minus2224 173 times 10minus4]
(25)
32 Constraints Analysis Due to the symmetry of jet config-uration the set of possible negative pitch control force is givenby
119880119910minus
119865= minus119865119898 minus2119865119898 cos
120587
9 minus2119865119898 cos
120587
18 minus2119865119898 minus4119865119898 cos
120587
9
minus4119865119898 cos120587
18
(26)
By combining (13) and (26) we obtain the set of allpossible pitch control force
119880119910
119865= 119865119898 2119865119898 cos
120587
9 2119865119898 cos
120587
18 2119865119898 4119865119898 cos
120587
9
4119865119898 cos120587
18 minus119865119898 minus2119865119898 cos
120587
9 minus2119865119898 cos
120587
18 minus2119865119898
minus4119865119898 cos120587
9 minus4119865119898 cos
120587
18
(27)
Substituting the jet parameters shown in Table 1 into theforegoing set yields
119880119910
119865= 2200 4135 4333 4400 8269 8666 minus2200 minus4135
minus4333 minus4400 minus8269 minus8666
(28)
Noting that the lateral forces are discrete variable we willutilize the linear combination of logical variables to describethe lateral force In terms of piecewise affine model (20) we
introduce logical variables 120575119865119894
isin 0 1 119894 = 1 2 12 toexpress the lateral thrust 119865119910
119887
119865119910119887
= 22001205751198651
+ 41351205751198652
+ 43331205751198653
+ 44001205751198654
+ 82691205751198655
+ 86661205751198656
minus 22001205751198657
minus 41351205751198658
minus 43331205751198659
minus 440012057511986510
minus 826912057511986511
minus 866612057511986512
(29)
In (29) the logical variables should satisfy the constraints
12
sum
119894=1
120575119865119894
= 0 or 1 (30)
where 0 means that no lateral force is generated while 1
means that the applied lateral force equals to one element ofset 119880119910119865
Denote 1199061 = 120575119911 the control input 119906 in model (23) can berewritten as
119906 = [1199061 119865119910119887
]119879 (31)
As shown in Table 1 the constraints on system states andcontrol input are
119909min le 119909 (119896) le 119909max
1199061min le 1199061 (119896) le 1199061max(32)
where 119909min = [minus053 minus522]119879 119909max = [053 522]
119879 1199061min =
minus053 1199061max = 053According to (30) we have
12
sum
119894=1
120575119865119894
le 1 (33)
which shows the constraint on the logical control inputUse logical variables 120575119894(119896) isin 0 1 119894 = 1 2 5 to
describe the operation points which satisfy the constraints
[1 0] 119909 (119896) + 037 le 0 lArrrArr 1205751 (119896) = 1
[1 0] 119909 (119896) + 0153 le 0 lArrrArr 1205752 (119896) = 1
[1 0] 119909 (119896) le 0 lArrrArr 1205753 (119896) = 1
[1 0] 119909 (119896) minus 0153 le 0 lArrrArr 1205754 (119896) = 1
[1 0] 119909 (119896) minus 037 le 0 lArrrArr 1205755 (119896) = 1
(34)
International Journal of Aerospace Engineering 9
Equation (34) can be transformed into the followingequivalent mixed logical inequalities [13]
[1 0] 119909 (119896) + 037 ge 120576 + (1198981 minus 120576) 1205751 (119896)
[1 0] 119909 (119896) + 037 le 1198721 (1 minus 1205751 (119896))
[1 0] 119909 (119896) + 0153 ge 120576 + (1198982 minus 120576) 1205752 (119896)
[1 0] 119909 (119896) + 0153 le 1198722 (1 minus 1205752 (119896))
[1 0] 119909 (119896) ge 120576 + (1198983 minus 120576) 1205753 (119896)
[1 0] 119909 (119896) le 1198723 (1 minus 1205753 (119896))
[1 0] 119909 (119896) minus 0153 ge 120576 + (1198984 minus 120576) 1205754 (119896)
[1 0] 119909 (119896) minus 0153 le 1198724 (1 minus 1205754 (119896))
[1 0] 119909 (119896) minus 037 ge 120576 + (1198985 minus 120576) 1205755 (119896)
[1 0] 119909 (119896) minus 037 le 1198725 (1 minus 1205755 (119896))
(35)
where 1198981 = minus016 1198721 = 090 1198982 = minus0377 1198722 = 06831198983 = minus053 1198723 = 053 1198984 = minus0683 1198724 = 0377 1198985 =
minus0901198725 = 016 and 120576 = 10minus6
In addition we introduce the auxiliary logical variables120575119894(119896) isin 0 1 119894 = 6 9 as follows
1205756 (119896) = (1 minus 1205751 (119896)) 1205752 (119896)
1205757 (119896) = (1 minus 1205752 (119896)) 1205753 (119896)
1205758 (119896) = (1 minus 1205753 (119896)) 1205754 (119896)
1205759 (119896) = (1 minus 1205754 (119896)) 1205755 (119896)
(36)
With 1205751 1205756 1205757 1205758 1205759 and 1 minus 1205755 the six regions canbe presented Similarly (36) can be transformed into theequivalent mixed logical inequalities
minus1205751 (119896) + 1205752 (119896) minus 1205756 (119896) le 0
1205751 (119896) + 1205756 (119896) le 1
minus1205752 (119896) + 1205756 (119896) le 0
minus1205752 (119896) + 1205753 (119896) minus 1205757 (119896) le 0
1205752 (119896) + 1205757 (119896) le 1
minus1205753 (119896) + 1205757 (119896) le 0
minus1205753 (119896) + 1205754 (119896) minus 1205758 (119896) le 0
1205753 (119896) + 1205758 (119896) le 1
minus1205754 (119896) + 1205758 (119896) le 0
minus1205754 (119896) + 1205755 (119896) minus 1205759 (119896) le 0
1205754 (119896) + 1205759 (119896) le 1
minus1205755 (119896) + 1205759 (119896) le 0
(37)
To describe the state space model of each region weintroduce the following auxiliary continuous variables
1199111 (119896) = (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) 1205751 (119896)
1199112 (119896) = (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) 1205756 (119896)
1199113 (119896) = (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) 1205757 (119896)
1199114 (119896) = (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) 1205758 (119896)
1199115 (119896) = (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) 1205759 (119896)
1199116 (119896) = (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) (1 minus 1205755 (119896))
(38)
Equation (38) can be converted to the equivalent mixedlogical inequalities
1199111 (119896) ge (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) minus 1198721198911 (1 minus 1205751 (119896))
1199111 (119896) le (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) minus 1198981198911 (1 minus 1205751 (119896))
1199111 (119896) ge 11989811989111205751 (119896)
1199111 (119896) le 11987211989111205751 (119896)
1199112 (119896) ge (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) minus 1198721198912 (1 minus 1205756 (119896))
1199112 (119896) le (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) minus 1198981198912 (1 minus 1205756 (119896))
1199112 (119896) ge 11989811989121205756 (119896)
1199112 (119896) le 11987211989121205756 (119896)
1199113 (119896) ge (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) minus 1198721198913 (1 minus 1205757 (119896))
1199113 (119896) le (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) minus 1198981198913 (1 minus 1205757 (119896))
1199113 (119896) ge 11989811989131205757 (119896)
1199113 (119896) le 11987211989131205757 (119896)
1199114 (119896) ge (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) minus 1198721198914 (1 minus 1205758 (119896))
1199114 (119896) le (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) minus 1198981198914 (1 minus 1205758 (119896))
1199114 (119896) ge 11989811989141205758 (119896)
1199114 (119896) le 11987211989141205758 (119896)
1199115 (119896) ge (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) minus 1198721198915 (1 minus 1205759 (119896))
1199115 (119896) le (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) minus 1198981198915 (1 minus 1205759 (119896))
10 International Journal of Aerospace Engineering
1199115 (119896) ge 11989811989151205759 (119896)
1199115 (119896) le 11987211989151205759 (119896)
1199116 (119896) ge (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) minus 11987211989151205755 (119896)
1199116 (119896) le (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) minus 11989811989151205755 (119896)
1199116 (119896) ge 1198981198916 (1 minus 1205755 (119896))
1199116 (119896) le 1198721198916 (1 minus 1205755 (119896))
(39)
where1198721198911 = [073 1084]1198791198981198911 = [minus077 minus1106]
1198791198721198912 =[076 1166]
119879 1198981198912 = [minus079 minus 1256]119879 1198721198913 =
[077 1273]119879 1198981198913 = [minus078 minus 1280]
119879 1198721198914 =
[076 1403]119879 1198981198914 = [minus076 minus 1403]
119879 1198721198915 =
[0725 1291]119879 1198981198915 = [minus0736 minus 1205]
119879 1198721198916 =
[0696 1154]119879 and1198981198916 = [minus073 minus 1130]
119879Then the whole MLD model of the missile is given by
119909 (119896 + 1) =
6
sum
119894=1
119911119894 (119896)
119910 (119896) = [1 0] 119909 (119896)
st (28) (30) (32) (34) (36) (38)
(40)
where (29) (31) (33) (35) (37) and (39) represent all theconstraint inequalities
4 Autopilot Design UsingHybrid MPC Method
In general we expect that the output 119910 tracks its command 119910119888
as fast as possible with a small amount of fuel consumptionMotivated by this observation we consider the followingoptimization problem
119869lowast
= min119906(119896)119906(119896+1)120575(119896)120575(119896+1|119896)119911(119896)119911(119896+1|119896)
119873
sum
119894=1
(1003817100381710038171003817119910 (119896 + 119894 | 119896)
minus119910119888 (119896 + 119894)1003817100381710038171003817
2
119876
+ 119906(119896 + 119894)2
119877)
st MLD model (39)
1199061min le 1199061 (119896) 1199061 (119896 + 1) le 1199061max
119909min le 119909 (119896) 119909 (119896 + 1) le 119909max
(41)
where 119910119888 is the command for angle of attack 119910(119896 + 119894 | 119896) ispredictive value of angle of attack 119873 denotes the predictivehorizon 119876 and 119877 are the weighting matrices and 119877 =
diag(119877120575119911
119877119865119910
) 119877120575119911
119877119865119910
are weighted coefficients of aerody-namic control surfaces and lateral pulse jets respectivelyThe
ratio of 119877120575119911
and 119877119865119910
represents the control allocation betweenaerodynamic control surfaces and lateral pulse jets When119877119865119910
119877120575119911
is increased the requirement for lateral force will bedeclined that is the fuel consumption can be lessened Inaddition the deduction can be verified from the simulationresults of Case 1 and Case 2
Different control allocation between the dual actuators(aerodynamic control surfaces and lateral pulse jets) can beobtained by setting different 119876 and 119877 Since both logicaland continuous variables are involved in (41) the aboveon-line optimization problem is a mixed integer quadraticprogramming (MIQP) problemwhich can be solved by usingthe hybrid MPC toolbox of MATLAB [14 15]
Remark 2 In an explicit MPC controller the main factorsaffecting the number of subregions include the systemdimen-sion the predictive horizon and the number of constrains Inthis paper the blendedmissile with aerodynamic control sur-faces and lateral jets is investigated To deal with the discreteproperty of the lateral jet forces some logical variables areintroduced for MPC controller design which increases thenumber of subregions inevitably
5 Numerical Simulations
51 Case 1 Numerical simulations are performed to ver-ify the feasibility of the proposed method in this sectionThe involved parameters are given in Table 1 The weightmatrices are set as 119876 = 10 119877120575
119911
= 0025 and 119877119865119910
=
diag(0005 0005 0005) Suppose the initial state is 1205720 =0 1199030 = 0 In order to avoid excessive computational load wechoose predictive horizon119873 = 2 and control horizon119872 = 2The command for angle of attack is 120572119888 = 02 rad
Explicit form of the optimal controller is provided byhybrid toolbox which is not given here for simplicity Insteadwe present the partition results associated with the controllerin Figure 6 where 4190 subregions are obtained and for eachsubregion a control law of the form 119906 = 119870119909 + 119887 is givenAs a benefit of using explicit MPC the controller parameters119870 and 119887 for all the subregions are obtained simultaneouslyonce the optimization problem is solved This property isobviously different from that of gain-scheduled controller(where the controller parameters for different regions areseparately determined)
However by a simple calculation we conclude that thesesubregions donot require toomuch storage space (the neededstorage space is approximately 14 times 8 times 4190 = 450KB)Moreover it should be noted that when the algorithm isimplemented in practice much more time will be needed toidentify which subregion the current states enter into This isanother important factor that affects the computational costof the proposed algorithm
The simulation results are shown in Figures 7ndash9 It isseen from Figure 7 that the actual angle of attack tracksthe command in less than 01 seconds As shown in Figures8 and 9 the aerodynamic force converges to a constant astime increases while the jets are only activated during thebeginning period (when the tracking error is obvious)
International Journal of Aerospace Engineering 11
58
68
73
108
174
180
245
252
254
270
271
272
273
274
276
277
299
300
301
302
06
04
02
0
minus02
minus04
Elev
ator
defl
ectio
n (r
ad)
Angle of attack (rad)minus04 minus02 0 02 04 06
1634
1635
1638
1648
1649
1650
1664
1673
1677
1678
1679
1712
1726
1743
1744
1746
1748
1751
1752
1983
1985
1993
2011
Late
ral f
orce
(N)
Angle of attack (rad)minus04 minus02 0 02 04 06
1000
800
600
400
200
0
minus200
minus400
minus600
minus800
minus1000
Polyhedral partitionmdash4190 regions Polyhedral partitionmdash4190 regions
Figure 6 The partition associated with the explicit controller
025
02
015
01
005
0
ActualCommand
0 02 04 06 08 1
Time (s)
Ang
le o
f atta
ck (r
ad)
Figure 7 The response of angle of attack
52 Case 2 The results for the case with a different weight119877120575119911
= 0005 are shown in Figures 10ndash12 It is seen that adifferent control allocation result is obtained
04
02
0
minus02
minus04
minus060 02 04 06 08 1
Time (s)
Elev
ator
defl
ectio
n (r
ad)
Figure 8 The response of elevator deflection
53 Case 3 In this case a different command 120572119888 =
02 cos(05120587119905) rad is considered and the weight matrices arethe same as the ones for Case 1 The simulation results areshown in Figures 13ndash15
It is seen from Figure 13 that asymptotic tracking is alsoachievedThemethod proposed in this paper can realize both
12 International Journal of Aerospace Engineering
1
05
0
minus05
minus1
times104
0 02 04 06 08 1
Time (s)
Late
ral f
orce
(N)
Figure 9 The response of lateral force
025
02
015
01
005
0
Ang
le o
f atta
ck (r
ad)
0 02 04 06 08 1
Time (s)
ActualCommand
Figure 10 The response of angle of attack
06
04
02
0
minus02
minus04
minus06
minus08
Elev
ator
defl
ectio
n (r
ad)
0 02 04 06 08 1
Time (s)
Figure 11 The response of elevator deflection
1
05
0
minus05
minus1
Late
ral f
orce
(N)
times104
0 02 04 06 08 1
Time (s)
Figure 12 The response of lateral force
03
025
02
015
01
005
0
minus005
minus01
minus015
minus02
Ang
le o
f atta
ck (r
ad)
0 05 1 15 2 25 3 35 4
Time (s)
ActualCommand
Figure 13 The response of angle of attack
06
04
02
0
minus02
minus04
minus06
minus08
Elev
ator
defl
ectio
n (r
ad)
0 05 1 15 2 25 3 35 4
Time (s)
Figure 14 The response of elevator deflection
International Journal of Aerospace Engineering 13
1
08
06
04
02
0
minus02
minus04
minus06
minus08
minus1
Late
ral f
orce
(N)
0 05 1 15 2 25 3 35 4
Time (s)
times104
Figure 15 The response of lateral force
fast tracking command and control allocation It is seen fromFigure 15 that the jets are activated while the tracking erroris obvious or command is varying rapidly
6 Conclusion
An autopilot design method for a missile with aerodynamiccontrol surfaces and lateral jets is presented in this paperThe nonlinear attitude control model is reduced to an MLDmodel Meanwhile the lateral force is described as linearcombination of logical variables due to the discrete values oflateral force Then the whole MLD model of attitude controlsystem is derived Autopilot design is accomplished usinghybrid MPC method By setting the related weighted coeffi-cients in index function the control allocation is obtainedMoreover numerical simulations are performed under thedifferent conditions the performance of tracking the attitudecommand and control allocation is verified and the explicitform of the control law can be obtained as well
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research presented in this document is supportedby the National Natural Science Foundation of Chinaunder Grant nos 61104193 61203191 and 61333001 theFundamental Research Funds for the Central Universities(HITNSRIF2012032) the Program for IBRSEM in HarbinInstitute of Technology under Grant HITIBRSEMA201415and the Foundation of Supporting Technology for Aerospaceunder Grant 2014-HT-HGD7
References
[1] R Hirokawa K Sato and S Manabe ldquoAutopilot design fora missile with reaction-jet using coefficient diagram methodrdquoin Proceedings of the AIAA Guidance Navigation and ControlConference and Exhibit 2001 August 2001
[2] P K Menon and V R Iragavarapu Adaptive Techniques forMultiple Actuator Blending Defense Technical InformationCenter 1998
[3] A G Munson and M W Garbrick ldquoJet interaction investiga-tionrdquo Report OR-9933 Martin Marietta Orlando Fla USA1969
[4] M Graham and P Weinacht ldquoNumerical simulation of lateralcontrol jetsrdquo in Proceedings of the 37th Aerospace SciencesMeeting and Exhibit 1999 AIAA Paper
[5] J S Shamma and J R Cloutier ldquoGain-scheduledmissile autopi-lot design using linear parameter varying transformationsrdquoJournal of Guidance Control and Dynamics vol 16 no 2 pp256ndash263 1993
[6] M Innocenti and A Thukral ldquoSimultaneous reaction jet andaerodynamic control of missile systemsrdquo AlAA 93-3739-CP1993
[7] D B Ridgely Y Lee and T Fanciullo ldquoDual aeropropulsivemissile control-optimal control and control allocationrdquo inProceedings of the AIAA Guidance Navigation and ControlConference and Exhibit Keystone Colo USA 2006
[8] D B Ridgely D Drake L Triplett and C Geise ldquoDynamiccontrol allocation of a missile with tails and reaction jetsrdquo inProceedings of the AIAA Guidance Navigation and ControlConference pp 3158ndash3189 August 2007
[9] D Q Mayne J B Rawlings C V Rao and P O ScokaertldquoConstrained model predictive control stability and optimal-ityrdquo Automatica vol 36 no 6 pp 789ndash814 2000
[10] A Bemporad F Borrelli and M Morari ldquoModel predictivecontrol based on linear programmingmdashthe explicit solutionrdquoIEEE Transactions on Automatic Control vol 47 no 12 pp1974ndash1985 2002
[11] C Jouannet and P Krus ldquoModelling of high angle of attackaerodynamicrdquo in Proceedings of the 25th AIAA Applied Aerody-namics Conference pp 1481ndash1516 June 2007
[12] S Venugopal and M Krishnamurthy ldquoMissile aerodynamics athigh angles of attack a prediction coderdquo Journal of Spacecraftand Rockets vol 32 no 2 pp 263ndash269 1995
[13] A Bemporad ldquoEfficient conversion of mixed logical dynamicalsystems into an equivalent piecewise affine formrdquo IEEE Trans-actions on Automatic Control vol 49 no 5 pp 832ndash838 2004
[14] F D Torrisi andA Bemporad ldquoHYSDELmdasha tool for generatingcomputational hybrid models for analysis and synthesis prob-lemsrdquo IEEE Transactions on Control Systems Technology vol 12no 2 pp 235ndash249 2004
[15] A Bemporad W P M H Heemels and B De SchutterldquoOn hybrid systems and closed-loop MPC systemsrdquo IEEETransactions on Automatic Control vol 47 no 5 pp 863ndash8692002
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 International Journal of Aerospace Engineering
yb
zb
Negative pitchcontrol region
Negative yawcontrol region
Positive pitchcontrol region
Positive yawcontrol region
17
8
910
11
12
12
3
4
5
6
713
14
15
16
18
(a) Odd-numbered rings
1
2
3
4
5
6
7
8
910
11
12
13
14
15
16
17
18
yb
zb
Negative pitchcontrol region
Negative yawcontrol region
Positive pitchcontrol region
Positive yawcontrol region
(b) Even-numbered rings
Figure 4 Schematic of control regions
rings are allowed to be fired simultaneously and no morethan two jets are activated in each fired ring Meanwhile itshould be ensured that only odd rings or even rings are firedand the jets are fired symmetrically about the correspondingsymmetry axis of each control region
Take the positive pitch control region as an example Theforces provided by the jets (119894 1) (119894 2) (119894 3) (119894 17) and (119894 18)
in an odd ring are given by
119865119900 = [119865119898 119865119898 cos120587
9119865119898 cos
2120587
9119865119898 cos
2120587
9119865119898 cos
120587
9]
119879
(8)
Similarly the forces provided by the jets (119894 1) (119894 2) (119894 17)and (119894 18) in an even ring are given by
119865119890 = [119865119898 cos120587
18119865119898 cos
120587
6119865119898 cos
120587
6119865119898 cos
120587
18]
119879
(9)
where119865119900 and119865119890 denote the forces associated with an odd ringand an even ring respectively
Use 119865119894 to denote the lateral force generated by ring 119894
Clearly 119865119894 should satisfy the condition
1198651= 1198659 119865
3= 1198657 119865
2= 11986510 119865
4= 1198658 (10)
When odd ring is fired the lateral force and moment aregiven by
119865119910119887
isin 119865119898 2119865119898 cos120587
9 2119865119898 cos
2120587
9 2119865119898 4119865119898 cos
120587
9
4119865119898 cos2120587
9
119872119911119887
isin 1198651198981198975 21198651198981198975 cos120587
9 21198651198981198975 cos
2120587
9 21198651198981198975
41198651198981198975 cos120587
9 41198651198981198975 cos
2120587
9
(11)
While even ring is fired the lateral force and moment aregiven by
119865119910119887
isin 2119865119898 cos120587
18 2119865119898 cos
120587
6 4119865119898 cos
120587
18 4119865119898 cos
120587
6
119872119911119887
isin 21198651198981198976 cos120587
18 21198651198981198976 cos
120587
6 41198651198981198976 cos
120587
18
41198651198981198976 cos120587
6
(12)
Noting Δ119897 is quite small we consider 1198975 ≃ 1198976 = 119897 Inorder to ensure that the jets fire efficiency the jets resultingin small moment components along 119911119887 axis are not activatedAs a result the sets of forces and moments are respectivelygiven by
119880119910+
119865= 119865119898 2119865119898 cos
120587
9 2119865119898 cos
120587
18 2119865119898 4119865119898 cos
120587
9
4119865119898 cos120587
18
(13)
119880119910+
119872= 119865119898119897 2119865119898119897 cos
120587
9 2119865119898119897 cos
120587
18 2119865119898119897 4119865119898119897 cos
120587
9
4119865119898119897 cos120587
18
(14)
where 119865119910119887
isin 119880119910+
119865and119872119911
119887
isin 119880119910+
119872 During each control period
a control moment belonging to119880119910+
119872will be used as the input
The mutual interference between high-speed jet streamand air leads to lateral jet interference effect In orderto take into account this interference force and moment
International Journal of Aerospace Engineering 5
amplification factors 119870119865119910
119870119865119911
119870119872119910
and 119870119872119911
are introducedas in [3 4]Then the resulting lateral forces andmoments are
[[[
[
119865119886
119909119887
119865119886
119910119887
119865119886
119911119887
]]]
]
= [
[
0
119865119910119887
+ 119870119865119910
119865119910119887
119865119911119887
+ 119870119865119911
119865119911119887
]
]
[[[
[
119872119886
119909119887
119872119886
119910119887
119872119886
119911119887
]]]
]
= [
[
0
119872119910119887
+ 119870119872119910
119872119910119887
119872119911119887
+ 119870119872119911
119872119911119887
]
]
(15)
Remark 1 In fact each pulse jet can be fired only once so thelocation of the fired jet cannot provide force anymore Basedon this precondition elements of sets 119880
119910+
119865and 119880
119910+
119872will be
less and less over time In this paper quantity change of setsrsquoelements is not considered to simplify the problem
23 Attitude Control Model Some transformation and sim-plification are applied to themissile model for control designIt is assumed that themissilersquosmass is of a constant valueNotethat the goal is to establish the angle of attack and sideslipangle The attitude control model is given by
= 119903 + 119902 sin120572 tan120573 minus
119876119878 (119862120572
119910120572 + 119862
120575119911
119910120575119911) cos120572
119898119881 cos120573
minus
(119865119910119887
+ 119870119865119910
119865119910119887
) cos120572
119898119881 cos120573minus
119866119910 cos120572119898119881 cos120573
120573 = 119902 cos120572 +
(119876119878 (119862120573
119911120573 + 119862
120575119910
119911 120575119910) + 119865119911119887
+ 119870119865119911
119865119911119887
) cos120573
119898119881
+
(119876119878 (119862120572
119910120572 + 119862
120575119911
119910120575119911) + 119865119910
119887
+ 119870119865119910
119865119910119887
) sin120572 sin120573
119898119881
+119866119911 cos120573
119898119881+
119866119910 sin120572 sin120573
119898119881
119902 =119872119910119887
119869119910
+
119870119872119910
119872119910119887
119869119910
+
119876119878119871119898120573
119910120573
119869119910
+119876119878119871119898
120575119910
119910 120575119910
119869119910
+
119876119878119871119898119902
119910119902
119869119910
119903 =119872119911119887
119869119911
+119870119872119911
119872119911119887
119869119911
+119876119878119871119898
120572
119911120572
119869119911
+119876119878119871119898
120575119911
119911120575119911
119869119911
+119876119878119871119898
119903
119911119903
119869119911
(16)
where 119898120573
119910 119898120575119911
119910 119898119902
119910 119898120572
119911 119898120575119911
119911 and 119898
119903
119911are aerodynamic
parameters
3 Mixed Logical Dynamical Model ofBlended Missile
31 Piecewise Affine Model of Blended Missile To simplifyanalysis the gravity term and the channel coupling term are
Table 1 Missilersquos overall parameters
Missilersquos takeoff mass [kg] 255Missilersquos full-length [m] 486Missilersquos diameter [m] 0317Distance between missile head and center ofmass [m] 2569
Moment of inertia 119869119909 119869119910 119869119911 [kgsdotm2] 303 3063 3063
Lateral force provided by individual jets [N] 2200Distance between jet ring center and centerof mass [m] 126
Range of angle of attack [rad] minus120587
6le 120572 le
120587
6
Range of pitch angular velocity [rads] minus5120587
3le 119903 le
5120587
3
Range of elevator deflection [rad] minus120587
6le 120575119911 le
120587
6
ignoredWith (16) themissile attitude control model of pitchchannel is
= 119903 minus
119876119878 (119862120572
119910120572 + 119862
120575119911
119910120575119911) cos120572
119898119881minus
(1 + 119870119865119910
) 119865119910119887
cos120572
119898119881
119903 =
(1 + 119870119872119911
) 119865119910119887
119897
119869119911
+119876119878119871119898
120572
119911120572
119869119911
+119876119878119871119898
120575119911
119911120575119911
119869119911
+119876119878119871119898
119903
119911119903
119869119911
(17)
Choose 119909 = [120572 119903]119879 as system state and 119906 = [120575119911 119865119910
119887
]119879 as
control input The considered output is 119910 = 120572 Then (17) canbe rewritten into the following state space form
= 119891 (119909) + 119892 (119909) 119906
119910 = [1 0] 119909
(18)
where
119891 (119909) =
[[[[
[
119903 minus
119876119878119862120572
119910120572 cos120572
119898119881
119876119878119871 (119898120572
119911120572 + 119898
119903
119911119903)
119869119911
]]]]
]
119892 (119909) =
[[[[[[
[
minus
119876119878119862120575119911
119910cos120572
119898119881minus
(1 + 119870119865119910
) cos120572
119898119881
119876119878119871119898120575119911
119911
119869119911
(1 + 119870119872119911
) 119897
119869119911
]]]]]]
]
(19)
The missile parameters are presented in Table 1Generally the aerodynamic coefficients 119862
120572
119910 119862120575119911
119910 119898120572
119911
and 119898120575119911
119911and the amplification factors 119870119865
119910
119870119872119911
are mainlyaffected by the flight velocity 119881 and the angle of attack 120572
[11 12] Since the terminal guidance phase is consideredin this paper the flight time is quite short and the flightvelocity of the missile can be treated as a constant Thusthe aerodynamic coefficients and the amplification factors are
6 International Journal of Aerospace Engineering
mainly affected by the angle of attack 120572 The relationshipsbetween them are shown in Figure 5
In practical application since 120572 is the main factor thatleads to system nonlinearities the system model is usuallylinearized if 120572 varies in small range As seen from Figure 5curves of the relation between aerodynamic parametersand angle of attack can be expressed by six line segmentsapproximately Here we choose 120572 = minus037 rad minus0153 rad0 0153 rad and 037 rad as the operation points and dividethe whole operation region into six subregions As a resultthe original model (17) can be converted to the followingpiecewise affine models
=
1198861119909 + 1198871119906 + 1198901 [1 0] 119909 le minus037
1198862119909 + 1198872119906 + 1198902 minus037 lt [1 0] 119909 le minus0153
1198863119909 + 1198873119906 + 1198903 minus0153 lt [1 0] 119909 le 0
1198864119909 + 1198874119906 + 1198904 0 lt [1 0] 119909 le 0153
1198865119909 + 1198875119906 + 1198905 0153 lt [1 0] 119909 le 037
1198866119909 + 1198876119906 + 1198906 [1 0] 119909 gt 037
(20)
119910 = [1 0] 119909 (21)
where
119886119894 =120597119891(119909)
120597119909
10038161003816100381610038161003816100381610038161003816119909=1199091198940
= [11988611
11989411988612
119894
11988621
11989411988622
119894
]
119887119894 = 119892 (1199091198940) = [11988711
11989411988712
119894
11988721
11989411988722
119894
] 119890119894 = [1198901
119894
1198902
119894
]
11988611
119894=
1205971198911 (119909)
120597120572
10038161003816100381610038161003816100381610038161003816119909=1199091198940
= minus119876119878
119898119881(
120597119862120572
119910
120597120572
1003816100381610038161003816100381610038161003816100381610038161003816120572=1205721198940
1205721198940 cos1205721198940 + 119862120572
119910(1205721198940) cos1205721198940
minus 119862120572
119910(1205721198940) 1205721198940 sin1205721198940)
11988612
119894=
1205971198911(119909)
120597119903
10038161003816100381610038161003816100381610038161003816119909=1199091198940
= 1
11988621
119894=
1205971198912 (119909)
120597120572
10038161003816100381610038161003816100381610038161003816119909=1199091198940
=119876119878119871
119869119911
(120597119898120572
119911
120597120572
100381610038161003816100381610038161003816100381610038161003816120572=1205721198940
1205721198940 + 119898120572
119911(1205721198940) +
120597119898119903
119911
120597120572
100381610038161003816100381610038161003816100381610038161003816120572=1205721198940
1199031198940)
11988622
119894=
1205971198912(119909)
120597119903
10038161003816100381610038161003816100381610038161003816119909=1199091198940
=119876119878119871
119869119911
119898120572
119911(1205721198940)
11988711
119894= minus
119876119878119862120575119911
119910(1205721198940) cos1205721198940119898119881
11988712
119894= minus
(1 + 119870119865119910
(1205721198940)) cos1205721198940119898119881
11988721
119894=
119876119878119871119898120575119911
119911(1205721198940)
119869119911
11988722
119894=
(1 + 119870119872119911
(1205721198940)) 119897
119869119911
1198901
119894= 11988611
1198941205721198940 + 119886
12
1198941199031198940
1198902
119894= 11988621
1198941205721198940 + 119886
22
1198941199031198940
(22)
where 119894 (119894 = 1 2 6) is the label corresponding to the 119894thregion
From Table 1 and Figure 5 we get the set of aerodynamicparameters at the point (119867119881) = (20 km 1000ms) as shownin Table 2
Choose the sampling period 119879119904 = 0025 s The discretestate-space expression is then given by
119909 (119896 + 1)
=
1198861119909 (119896) + 1119906 (119896) + 1198901 [1 0] 119909 (119896) le minus037
1198862119909 (119896) + 2119906 (119896) + 1198902 minus037 lt [1 0] 119909 (119896) le minus0153
1198863119909 (119896) + 3119906 (119896) + 1198903 minus0153 lt [1 0] 119909 (119896) le 0
1198864119909 (119896) + 4119906 (119896) + 1198904 0 lt [1 0] 119909 (119896) le 0153
1198865119909 (119896) + 5119906 (119896) + 1198905 0153 lt [1 0] 119909 (119896) le 037
1198866119909 (119896) + 6119906 (119896) + 1198906 [1 0] 119909 (119896) gt 037
(23)
119910 (119896) = [1 0] 119909 (119896) (24)
where
1198861 = [104 0025
022 0995] 1198862 = [
1051 0025
0218 0995]
1198863 = [1023 00252
0248 09951] 1198864 = [
09954 00248
02732 09954]
1198865 = [09697 00245
02913 09956] 1198866 = [
09594 00244
03137 09959]
1198901 = [minus00183
minus01123] 1198902 = [
minus00175
minus00792]
1198903 = [minus00131
minus00376] 1198904 = [
0
0]
1198905 = [minus00053
00454] 1198906 = [
minus00169
01193]
1 = [minus0028 159 times 10
minus6
minus2166 142 times 10minus4]
2 = [minus003 218 times 10
minus6
minus2224 187 times 10minus4]
International Journal of Aerospace Engineering 7
2
15
1
05
0
minus05
minus1
minus15minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (Q
SmV
)C120572 y
(a) Relation between 119862120572119910and 120572
0092
009
0088
0086
0084
0082
008
0078
0076
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (Q
SmV
)C120575119911y
(b) Relation between 119862120575119911119910 and 120572
125
12
115
11
105
10
95
9minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (Q
SLJz)m
120572 z
(c) Relation between119898120572119911and 120572
96
94
92
90
88
86
84minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (minusQSL
Jz)m
120575119911z
(d) Relation between119898120575119911119911 and 120572
1
09
08
07
06
05
04
03
02
01
Am
plifi
catio
n fa
ctorKF
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
(e) Relation between119870119865119910
and 120572
12
11
1
09
08
07
06
05
04
03
Am
plifi
catio
n fa
ctorKM119911
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
(f) Relation between119870119872119911
and 120572
Figure 5 Aerodynamic parameters as functions of angle of attack
8 International Journal of Aerospace Engineering
Table 2 Aerodynamic parameters of pitch channel
Aerodynamic parameter 119876119878119862120572
119910119898119881 119876119878119862
120575119911
119910119898119881 119876119878119871119898
120572
119911119869119911
119876119878119871119898119903
119911119869119911
119876119878119871119898120575119911
119911119869119911
120572 = minus053 minus1175 0076 947 minus032 minus8489
120572 = minus037 minus0944 0082 973 minus032 minus8924
120572 = minus0153 minus023 0082 1043 minus032 minus8938
120572 = 0 036 009 1101 minus032 minus9510
120572 = 0153 094 0082 1158 minus032 minus8934
120572 = 037 163 0082 1224 minus032 minus8918
3 = [minus003 268 times 10
minus6
minus2228 223 times 10minus4]
4 = [minus0032 277 times 10
minus6
minus2371 232 times 10minus4]
5 = [minus003 227 times 10
minus6
minus2228 198 times 10minus4]
6 = [minus0029 191 times 10
minus6
minus2224 173 times 10minus4]
(25)
32 Constraints Analysis Due to the symmetry of jet config-uration the set of possible negative pitch control force is givenby
119880119910minus
119865= minus119865119898 minus2119865119898 cos
120587
9 minus2119865119898 cos
120587
18 minus2119865119898 minus4119865119898 cos
120587
9
minus4119865119898 cos120587
18
(26)
By combining (13) and (26) we obtain the set of allpossible pitch control force
119880119910
119865= 119865119898 2119865119898 cos
120587
9 2119865119898 cos
120587
18 2119865119898 4119865119898 cos
120587
9
4119865119898 cos120587
18 minus119865119898 minus2119865119898 cos
120587
9 minus2119865119898 cos
120587
18 minus2119865119898
minus4119865119898 cos120587
9 minus4119865119898 cos
120587
18
(27)
Substituting the jet parameters shown in Table 1 into theforegoing set yields
119880119910
119865= 2200 4135 4333 4400 8269 8666 minus2200 minus4135
minus4333 minus4400 minus8269 minus8666
(28)
Noting that the lateral forces are discrete variable we willutilize the linear combination of logical variables to describethe lateral force In terms of piecewise affine model (20) we
introduce logical variables 120575119865119894
isin 0 1 119894 = 1 2 12 toexpress the lateral thrust 119865119910
119887
119865119910119887
= 22001205751198651
+ 41351205751198652
+ 43331205751198653
+ 44001205751198654
+ 82691205751198655
+ 86661205751198656
minus 22001205751198657
minus 41351205751198658
minus 43331205751198659
minus 440012057511986510
minus 826912057511986511
minus 866612057511986512
(29)
In (29) the logical variables should satisfy the constraints
12
sum
119894=1
120575119865119894
= 0 or 1 (30)
where 0 means that no lateral force is generated while 1
means that the applied lateral force equals to one element ofset 119880119910119865
Denote 1199061 = 120575119911 the control input 119906 in model (23) can berewritten as
119906 = [1199061 119865119910119887
]119879 (31)
As shown in Table 1 the constraints on system states andcontrol input are
119909min le 119909 (119896) le 119909max
1199061min le 1199061 (119896) le 1199061max(32)
where 119909min = [minus053 minus522]119879 119909max = [053 522]
119879 1199061min =
minus053 1199061max = 053According to (30) we have
12
sum
119894=1
120575119865119894
le 1 (33)
which shows the constraint on the logical control inputUse logical variables 120575119894(119896) isin 0 1 119894 = 1 2 5 to
describe the operation points which satisfy the constraints
[1 0] 119909 (119896) + 037 le 0 lArrrArr 1205751 (119896) = 1
[1 0] 119909 (119896) + 0153 le 0 lArrrArr 1205752 (119896) = 1
[1 0] 119909 (119896) le 0 lArrrArr 1205753 (119896) = 1
[1 0] 119909 (119896) minus 0153 le 0 lArrrArr 1205754 (119896) = 1
[1 0] 119909 (119896) minus 037 le 0 lArrrArr 1205755 (119896) = 1
(34)
International Journal of Aerospace Engineering 9
Equation (34) can be transformed into the followingequivalent mixed logical inequalities [13]
[1 0] 119909 (119896) + 037 ge 120576 + (1198981 minus 120576) 1205751 (119896)
[1 0] 119909 (119896) + 037 le 1198721 (1 minus 1205751 (119896))
[1 0] 119909 (119896) + 0153 ge 120576 + (1198982 minus 120576) 1205752 (119896)
[1 0] 119909 (119896) + 0153 le 1198722 (1 minus 1205752 (119896))
[1 0] 119909 (119896) ge 120576 + (1198983 minus 120576) 1205753 (119896)
[1 0] 119909 (119896) le 1198723 (1 minus 1205753 (119896))
[1 0] 119909 (119896) minus 0153 ge 120576 + (1198984 minus 120576) 1205754 (119896)
[1 0] 119909 (119896) minus 0153 le 1198724 (1 minus 1205754 (119896))
[1 0] 119909 (119896) minus 037 ge 120576 + (1198985 minus 120576) 1205755 (119896)
[1 0] 119909 (119896) minus 037 le 1198725 (1 minus 1205755 (119896))
(35)
where 1198981 = minus016 1198721 = 090 1198982 = minus0377 1198722 = 06831198983 = minus053 1198723 = 053 1198984 = minus0683 1198724 = 0377 1198985 =
minus0901198725 = 016 and 120576 = 10minus6
In addition we introduce the auxiliary logical variables120575119894(119896) isin 0 1 119894 = 6 9 as follows
1205756 (119896) = (1 minus 1205751 (119896)) 1205752 (119896)
1205757 (119896) = (1 minus 1205752 (119896)) 1205753 (119896)
1205758 (119896) = (1 minus 1205753 (119896)) 1205754 (119896)
1205759 (119896) = (1 minus 1205754 (119896)) 1205755 (119896)
(36)
With 1205751 1205756 1205757 1205758 1205759 and 1 minus 1205755 the six regions canbe presented Similarly (36) can be transformed into theequivalent mixed logical inequalities
minus1205751 (119896) + 1205752 (119896) minus 1205756 (119896) le 0
1205751 (119896) + 1205756 (119896) le 1
minus1205752 (119896) + 1205756 (119896) le 0
minus1205752 (119896) + 1205753 (119896) minus 1205757 (119896) le 0
1205752 (119896) + 1205757 (119896) le 1
minus1205753 (119896) + 1205757 (119896) le 0
minus1205753 (119896) + 1205754 (119896) minus 1205758 (119896) le 0
1205753 (119896) + 1205758 (119896) le 1
minus1205754 (119896) + 1205758 (119896) le 0
minus1205754 (119896) + 1205755 (119896) minus 1205759 (119896) le 0
1205754 (119896) + 1205759 (119896) le 1
minus1205755 (119896) + 1205759 (119896) le 0
(37)
To describe the state space model of each region weintroduce the following auxiliary continuous variables
1199111 (119896) = (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) 1205751 (119896)
1199112 (119896) = (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) 1205756 (119896)
1199113 (119896) = (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) 1205757 (119896)
1199114 (119896) = (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) 1205758 (119896)
1199115 (119896) = (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) 1205759 (119896)
1199116 (119896) = (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) (1 minus 1205755 (119896))
(38)
Equation (38) can be converted to the equivalent mixedlogical inequalities
1199111 (119896) ge (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) minus 1198721198911 (1 minus 1205751 (119896))
1199111 (119896) le (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) minus 1198981198911 (1 minus 1205751 (119896))
1199111 (119896) ge 11989811989111205751 (119896)
1199111 (119896) le 11987211989111205751 (119896)
1199112 (119896) ge (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) minus 1198721198912 (1 minus 1205756 (119896))
1199112 (119896) le (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) minus 1198981198912 (1 minus 1205756 (119896))
1199112 (119896) ge 11989811989121205756 (119896)
1199112 (119896) le 11987211989121205756 (119896)
1199113 (119896) ge (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) minus 1198721198913 (1 minus 1205757 (119896))
1199113 (119896) le (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) minus 1198981198913 (1 minus 1205757 (119896))
1199113 (119896) ge 11989811989131205757 (119896)
1199113 (119896) le 11987211989131205757 (119896)
1199114 (119896) ge (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) minus 1198721198914 (1 minus 1205758 (119896))
1199114 (119896) le (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) minus 1198981198914 (1 minus 1205758 (119896))
1199114 (119896) ge 11989811989141205758 (119896)
1199114 (119896) le 11987211989141205758 (119896)
1199115 (119896) ge (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) minus 1198721198915 (1 minus 1205759 (119896))
1199115 (119896) le (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) minus 1198981198915 (1 minus 1205759 (119896))
10 International Journal of Aerospace Engineering
1199115 (119896) ge 11989811989151205759 (119896)
1199115 (119896) le 11987211989151205759 (119896)
1199116 (119896) ge (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) minus 11987211989151205755 (119896)
1199116 (119896) le (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) minus 11989811989151205755 (119896)
1199116 (119896) ge 1198981198916 (1 minus 1205755 (119896))
1199116 (119896) le 1198721198916 (1 minus 1205755 (119896))
(39)
where1198721198911 = [073 1084]1198791198981198911 = [minus077 minus1106]
1198791198721198912 =[076 1166]
119879 1198981198912 = [minus079 minus 1256]119879 1198721198913 =
[077 1273]119879 1198981198913 = [minus078 minus 1280]
119879 1198721198914 =
[076 1403]119879 1198981198914 = [minus076 minus 1403]
119879 1198721198915 =
[0725 1291]119879 1198981198915 = [minus0736 minus 1205]
119879 1198721198916 =
[0696 1154]119879 and1198981198916 = [minus073 minus 1130]
119879Then the whole MLD model of the missile is given by
119909 (119896 + 1) =
6
sum
119894=1
119911119894 (119896)
119910 (119896) = [1 0] 119909 (119896)
st (28) (30) (32) (34) (36) (38)
(40)
where (29) (31) (33) (35) (37) and (39) represent all theconstraint inequalities
4 Autopilot Design UsingHybrid MPC Method
In general we expect that the output 119910 tracks its command 119910119888
as fast as possible with a small amount of fuel consumptionMotivated by this observation we consider the followingoptimization problem
119869lowast
= min119906(119896)119906(119896+1)120575(119896)120575(119896+1|119896)119911(119896)119911(119896+1|119896)
119873
sum
119894=1
(1003817100381710038171003817119910 (119896 + 119894 | 119896)
minus119910119888 (119896 + 119894)1003817100381710038171003817
2
119876
+ 119906(119896 + 119894)2
119877)
st MLD model (39)
1199061min le 1199061 (119896) 1199061 (119896 + 1) le 1199061max
119909min le 119909 (119896) 119909 (119896 + 1) le 119909max
(41)
where 119910119888 is the command for angle of attack 119910(119896 + 119894 | 119896) ispredictive value of angle of attack 119873 denotes the predictivehorizon 119876 and 119877 are the weighting matrices and 119877 =
diag(119877120575119911
119877119865119910
) 119877120575119911
119877119865119910
are weighted coefficients of aerody-namic control surfaces and lateral pulse jets respectivelyThe
ratio of 119877120575119911
and 119877119865119910
represents the control allocation betweenaerodynamic control surfaces and lateral pulse jets When119877119865119910
119877120575119911
is increased the requirement for lateral force will bedeclined that is the fuel consumption can be lessened Inaddition the deduction can be verified from the simulationresults of Case 1 and Case 2
Different control allocation between the dual actuators(aerodynamic control surfaces and lateral pulse jets) can beobtained by setting different 119876 and 119877 Since both logicaland continuous variables are involved in (41) the aboveon-line optimization problem is a mixed integer quadraticprogramming (MIQP) problemwhich can be solved by usingthe hybrid MPC toolbox of MATLAB [14 15]
Remark 2 In an explicit MPC controller the main factorsaffecting the number of subregions include the systemdimen-sion the predictive horizon and the number of constrains Inthis paper the blendedmissile with aerodynamic control sur-faces and lateral jets is investigated To deal with the discreteproperty of the lateral jet forces some logical variables areintroduced for MPC controller design which increases thenumber of subregions inevitably
5 Numerical Simulations
51 Case 1 Numerical simulations are performed to ver-ify the feasibility of the proposed method in this sectionThe involved parameters are given in Table 1 The weightmatrices are set as 119876 = 10 119877120575
119911
= 0025 and 119877119865119910
=
diag(0005 0005 0005) Suppose the initial state is 1205720 =0 1199030 = 0 In order to avoid excessive computational load wechoose predictive horizon119873 = 2 and control horizon119872 = 2The command for angle of attack is 120572119888 = 02 rad
Explicit form of the optimal controller is provided byhybrid toolbox which is not given here for simplicity Insteadwe present the partition results associated with the controllerin Figure 6 where 4190 subregions are obtained and for eachsubregion a control law of the form 119906 = 119870119909 + 119887 is givenAs a benefit of using explicit MPC the controller parameters119870 and 119887 for all the subregions are obtained simultaneouslyonce the optimization problem is solved This property isobviously different from that of gain-scheduled controller(where the controller parameters for different regions areseparately determined)
However by a simple calculation we conclude that thesesubregions donot require toomuch storage space (the neededstorage space is approximately 14 times 8 times 4190 = 450KB)Moreover it should be noted that when the algorithm isimplemented in practice much more time will be needed toidentify which subregion the current states enter into This isanother important factor that affects the computational costof the proposed algorithm
The simulation results are shown in Figures 7ndash9 It isseen from Figure 7 that the actual angle of attack tracksthe command in less than 01 seconds As shown in Figures8 and 9 the aerodynamic force converges to a constant astime increases while the jets are only activated during thebeginning period (when the tracking error is obvious)
International Journal of Aerospace Engineering 11
58
68
73
108
174
180
245
252
254
270
271
272
273
274
276
277
299
300
301
302
06
04
02
0
minus02
minus04
Elev
ator
defl
ectio
n (r
ad)
Angle of attack (rad)minus04 minus02 0 02 04 06
1634
1635
1638
1648
1649
1650
1664
1673
1677
1678
1679
1712
1726
1743
1744
1746
1748
1751
1752
1983
1985
1993
2011
Late
ral f
orce
(N)
Angle of attack (rad)minus04 minus02 0 02 04 06
1000
800
600
400
200
0
minus200
minus400
minus600
minus800
minus1000
Polyhedral partitionmdash4190 regions Polyhedral partitionmdash4190 regions
Figure 6 The partition associated with the explicit controller
025
02
015
01
005
0
ActualCommand
0 02 04 06 08 1
Time (s)
Ang
le o
f atta
ck (r
ad)
Figure 7 The response of angle of attack
52 Case 2 The results for the case with a different weight119877120575119911
= 0005 are shown in Figures 10ndash12 It is seen that adifferent control allocation result is obtained
04
02
0
minus02
minus04
minus060 02 04 06 08 1
Time (s)
Elev
ator
defl
ectio
n (r
ad)
Figure 8 The response of elevator deflection
53 Case 3 In this case a different command 120572119888 =
02 cos(05120587119905) rad is considered and the weight matrices arethe same as the ones for Case 1 The simulation results areshown in Figures 13ndash15
It is seen from Figure 13 that asymptotic tracking is alsoachievedThemethod proposed in this paper can realize both
12 International Journal of Aerospace Engineering
1
05
0
minus05
minus1
times104
0 02 04 06 08 1
Time (s)
Late
ral f
orce
(N)
Figure 9 The response of lateral force
025
02
015
01
005
0
Ang
le o
f atta
ck (r
ad)
0 02 04 06 08 1
Time (s)
ActualCommand
Figure 10 The response of angle of attack
06
04
02
0
minus02
minus04
minus06
minus08
Elev
ator
defl
ectio
n (r
ad)
0 02 04 06 08 1
Time (s)
Figure 11 The response of elevator deflection
1
05
0
minus05
minus1
Late
ral f
orce
(N)
times104
0 02 04 06 08 1
Time (s)
Figure 12 The response of lateral force
03
025
02
015
01
005
0
minus005
minus01
minus015
minus02
Ang
le o
f atta
ck (r
ad)
0 05 1 15 2 25 3 35 4
Time (s)
ActualCommand
Figure 13 The response of angle of attack
06
04
02
0
minus02
minus04
minus06
minus08
Elev
ator
defl
ectio
n (r
ad)
0 05 1 15 2 25 3 35 4
Time (s)
Figure 14 The response of elevator deflection
International Journal of Aerospace Engineering 13
1
08
06
04
02
0
minus02
minus04
minus06
minus08
minus1
Late
ral f
orce
(N)
0 05 1 15 2 25 3 35 4
Time (s)
times104
Figure 15 The response of lateral force
fast tracking command and control allocation It is seen fromFigure 15 that the jets are activated while the tracking erroris obvious or command is varying rapidly
6 Conclusion
An autopilot design method for a missile with aerodynamiccontrol surfaces and lateral jets is presented in this paperThe nonlinear attitude control model is reduced to an MLDmodel Meanwhile the lateral force is described as linearcombination of logical variables due to the discrete values oflateral force Then the whole MLD model of attitude controlsystem is derived Autopilot design is accomplished usinghybrid MPC method By setting the related weighted coeffi-cients in index function the control allocation is obtainedMoreover numerical simulations are performed under thedifferent conditions the performance of tracking the attitudecommand and control allocation is verified and the explicitform of the control law can be obtained as well
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research presented in this document is supportedby the National Natural Science Foundation of Chinaunder Grant nos 61104193 61203191 and 61333001 theFundamental Research Funds for the Central Universities(HITNSRIF2012032) the Program for IBRSEM in HarbinInstitute of Technology under Grant HITIBRSEMA201415and the Foundation of Supporting Technology for Aerospaceunder Grant 2014-HT-HGD7
References
[1] R Hirokawa K Sato and S Manabe ldquoAutopilot design fora missile with reaction-jet using coefficient diagram methodrdquoin Proceedings of the AIAA Guidance Navigation and ControlConference and Exhibit 2001 August 2001
[2] P K Menon and V R Iragavarapu Adaptive Techniques forMultiple Actuator Blending Defense Technical InformationCenter 1998
[3] A G Munson and M W Garbrick ldquoJet interaction investiga-tionrdquo Report OR-9933 Martin Marietta Orlando Fla USA1969
[4] M Graham and P Weinacht ldquoNumerical simulation of lateralcontrol jetsrdquo in Proceedings of the 37th Aerospace SciencesMeeting and Exhibit 1999 AIAA Paper
[5] J S Shamma and J R Cloutier ldquoGain-scheduledmissile autopi-lot design using linear parameter varying transformationsrdquoJournal of Guidance Control and Dynamics vol 16 no 2 pp256ndash263 1993
[6] M Innocenti and A Thukral ldquoSimultaneous reaction jet andaerodynamic control of missile systemsrdquo AlAA 93-3739-CP1993
[7] D B Ridgely Y Lee and T Fanciullo ldquoDual aeropropulsivemissile control-optimal control and control allocationrdquo inProceedings of the AIAA Guidance Navigation and ControlConference and Exhibit Keystone Colo USA 2006
[8] D B Ridgely D Drake L Triplett and C Geise ldquoDynamiccontrol allocation of a missile with tails and reaction jetsrdquo inProceedings of the AIAA Guidance Navigation and ControlConference pp 3158ndash3189 August 2007
[9] D Q Mayne J B Rawlings C V Rao and P O ScokaertldquoConstrained model predictive control stability and optimal-ityrdquo Automatica vol 36 no 6 pp 789ndash814 2000
[10] A Bemporad F Borrelli and M Morari ldquoModel predictivecontrol based on linear programmingmdashthe explicit solutionrdquoIEEE Transactions on Automatic Control vol 47 no 12 pp1974ndash1985 2002
[11] C Jouannet and P Krus ldquoModelling of high angle of attackaerodynamicrdquo in Proceedings of the 25th AIAA Applied Aerody-namics Conference pp 1481ndash1516 June 2007
[12] S Venugopal and M Krishnamurthy ldquoMissile aerodynamics athigh angles of attack a prediction coderdquo Journal of Spacecraftand Rockets vol 32 no 2 pp 263ndash269 1995
[13] A Bemporad ldquoEfficient conversion of mixed logical dynamicalsystems into an equivalent piecewise affine formrdquo IEEE Trans-actions on Automatic Control vol 49 no 5 pp 832ndash838 2004
[14] F D Torrisi andA Bemporad ldquoHYSDELmdasha tool for generatingcomputational hybrid models for analysis and synthesis prob-lemsrdquo IEEE Transactions on Control Systems Technology vol 12no 2 pp 235ndash249 2004
[15] A Bemporad W P M H Heemels and B De SchutterldquoOn hybrid systems and closed-loop MPC systemsrdquo IEEETransactions on Automatic Control vol 47 no 5 pp 863ndash8692002
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 5
amplification factors 119870119865119910
119870119865119911
119870119872119910
and 119870119872119911
are introducedas in [3 4]Then the resulting lateral forces andmoments are
[[[
[
119865119886
119909119887
119865119886
119910119887
119865119886
119911119887
]]]
]
= [
[
0
119865119910119887
+ 119870119865119910
119865119910119887
119865119911119887
+ 119870119865119911
119865119911119887
]
]
[[[
[
119872119886
119909119887
119872119886
119910119887
119872119886
119911119887
]]]
]
= [
[
0
119872119910119887
+ 119870119872119910
119872119910119887
119872119911119887
+ 119870119872119911
119872119911119887
]
]
(15)
Remark 1 In fact each pulse jet can be fired only once so thelocation of the fired jet cannot provide force anymore Basedon this precondition elements of sets 119880
119910+
119865and 119880
119910+
119872will be
less and less over time In this paper quantity change of setsrsquoelements is not considered to simplify the problem
23 Attitude Control Model Some transformation and sim-plification are applied to themissile model for control designIt is assumed that themissilersquosmass is of a constant valueNotethat the goal is to establish the angle of attack and sideslipangle The attitude control model is given by
= 119903 + 119902 sin120572 tan120573 minus
119876119878 (119862120572
119910120572 + 119862
120575119911
119910120575119911) cos120572
119898119881 cos120573
minus
(119865119910119887
+ 119870119865119910
119865119910119887
) cos120572
119898119881 cos120573minus
119866119910 cos120572119898119881 cos120573
120573 = 119902 cos120572 +
(119876119878 (119862120573
119911120573 + 119862
120575119910
119911 120575119910) + 119865119911119887
+ 119870119865119911
119865119911119887
) cos120573
119898119881
+
(119876119878 (119862120572
119910120572 + 119862
120575119911
119910120575119911) + 119865119910
119887
+ 119870119865119910
119865119910119887
) sin120572 sin120573
119898119881
+119866119911 cos120573
119898119881+
119866119910 sin120572 sin120573
119898119881
119902 =119872119910119887
119869119910
+
119870119872119910
119872119910119887
119869119910
+
119876119878119871119898120573
119910120573
119869119910
+119876119878119871119898
120575119910
119910 120575119910
119869119910
+
119876119878119871119898119902
119910119902
119869119910
119903 =119872119911119887
119869119911
+119870119872119911
119872119911119887
119869119911
+119876119878119871119898
120572
119911120572
119869119911
+119876119878119871119898
120575119911
119911120575119911
119869119911
+119876119878119871119898
119903
119911119903
119869119911
(16)
where 119898120573
119910 119898120575119911
119910 119898119902
119910 119898120572
119911 119898120575119911
119911 and 119898
119903
119911are aerodynamic
parameters
3 Mixed Logical Dynamical Model ofBlended Missile
31 Piecewise Affine Model of Blended Missile To simplifyanalysis the gravity term and the channel coupling term are
Table 1 Missilersquos overall parameters
Missilersquos takeoff mass [kg] 255Missilersquos full-length [m] 486Missilersquos diameter [m] 0317Distance between missile head and center ofmass [m] 2569
Moment of inertia 119869119909 119869119910 119869119911 [kgsdotm2] 303 3063 3063
Lateral force provided by individual jets [N] 2200Distance between jet ring center and centerof mass [m] 126
Range of angle of attack [rad] minus120587
6le 120572 le
120587
6
Range of pitch angular velocity [rads] minus5120587
3le 119903 le
5120587
3
Range of elevator deflection [rad] minus120587
6le 120575119911 le
120587
6
ignoredWith (16) themissile attitude control model of pitchchannel is
= 119903 minus
119876119878 (119862120572
119910120572 + 119862
120575119911
119910120575119911) cos120572
119898119881minus
(1 + 119870119865119910
) 119865119910119887
cos120572
119898119881
119903 =
(1 + 119870119872119911
) 119865119910119887
119897
119869119911
+119876119878119871119898
120572
119911120572
119869119911
+119876119878119871119898
120575119911
119911120575119911
119869119911
+119876119878119871119898
119903
119911119903
119869119911
(17)
Choose 119909 = [120572 119903]119879 as system state and 119906 = [120575119911 119865119910
119887
]119879 as
control input The considered output is 119910 = 120572 Then (17) canbe rewritten into the following state space form
= 119891 (119909) + 119892 (119909) 119906
119910 = [1 0] 119909
(18)
where
119891 (119909) =
[[[[
[
119903 minus
119876119878119862120572
119910120572 cos120572
119898119881
119876119878119871 (119898120572
119911120572 + 119898
119903
119911119903)
119869119911
]]]]
]
119892 (119909) =
[[[[[[
[
minus
119876119878119862120575119911
119910cos120572
119898119881minus
(1 + 119870119865119910
) cos120572
119898119881
119876119878119871119898120575119911
119911
119869119911
(1 + 119870119872119911
) 119897
119869119911
]]]]]]
]
(19)
The missile parameters are presented in Table 1Generally the aerodynamic coefficients 119862
120572
119910 119862120575119911
119910 119898120572
119911
and 119898120575119911
119911and the amplification factors 119870119865
119910
119870119872119911
are mainlyaffected by the flight velocity 119881 and the angle of attack 120572
[11 12] Since the terminal guidance phase is consideredin this paper the flight time is quite short and the flightvelocity of the missile can be treated as a constant Thusthe aerodynamic coefficients and the amplification factors are
6 International Journal of Aerospace Engineering
mainly affected by the angle of attack 120572 The relationshipsbetween them are shown in Figure 5
In practical application since 120572 is the main factor thatleads to system nonlinearities the system model is usuallylinearized if 120572 varies in small range As seen from Figure 5curves of the relation between aerodynamic parametersand angle of attack can be expressed by six line segmentsapproximately Here we choose 120572 = minus037 rad minus0153 rad0 0153 rad and 037 rad as the operation points and dividethe whole operation region into six subregions As a resultthe original model (17) can be converted to the followingpiecewise affine models
=
1198861119909 + 1198871119906 + 1198901 [1 0] 119909 le minus037
1198862119909 + 1198872119906 + 1198902 minus037 lt [1 0] 119909 le minus0153
1198863119909 + 1198873119906 + 1198903 minus0153 lt [1 0] 119909 le 0
1198864119909 + 1198874119906 + 1198904 0 lt [1 0] 119909 le 0153
1198865119909 + 1198875119906 + 1198905 0153 lt [1 0] 119909 le 037
1198866119909 + 1198876119906 + 1198906 [1 0] 119909 gt 037
(20)
119910 = [1 0] 119909 (21)
where
119886119894 =120597119891(119909)
120597119909
10038161003816100381610038161003816100381610038161003816119909=1199091198940
= [11988611
11989411988612
119894
11988621
11989411988622
119894
]
119887119894 = 119892 (1199091198940) = [11988711
11989411988712
119894
11988721
11989411988722
119894
] 119890119894 = [1198901
119894
1198902
119894
]
11988611
119894=
1205971198911 (119909)
120597120572
10038161003816100381610038161003816100381610038161003816119909=1199091198940
= minus119876119878
119898119881(
120597119862120572
119910
120597120572
1003816100381610038161003816100381610038161003816100381610038161003816120572=1205721198940
1205721198940 cos1205721198940 + 119862120572
119910(1205721198940) cos1205721198940
minus 119862120572
119910(1205721198940) 1205721198940 sin1205721198940)
11988612
119894=
1205971198911(119909)
120597119903
10038161003816100381610038161003816100381610038161003816119909=1199091198940
= 1
11988621
119894=
1205971198912 (119909)
120597120572
10038161003816100381610038161003816100381610038161003816119909=1199091198940
=119876119878119871
119869119911
(120597119898120572
119911
120597120572
100381610038161003816100381610038161003816100381610038161003816120572=1205721198940
1205721198940 + 119898120572
119911(1205721198940) +
120597119898119903
119911
120597120572
100381610038161003816100381610038161003816100381610038161003816120572=1205721198940
1199031198940)
11988622
119894=
1205971198912(119909)
120597119903
10038161003816100381610038161003816100381610038161003816119909=1199091198940
=119876119878119871
119869119911
119898120572
119911(1205721198940)
11988711
119894= minus
119876119878119862120575119911
119910(1205721198940) cos1205721198940119898119881
11988712
119894= minus
(1 + 119870119865119910
(1205721198940)) cos1205721198940119898119881
11988721
119894=
119876119878119871119898120575119911
119911(1205721198940)
119869119911
11988722
119894=
(1 + 119870119872119911
(1205721198940)) 119897
119869119911
1198901
119894= 11988611
1198941205721198940 + 119886
12
1198941199031198940
1198902
119894= 11988621
1198941205721198940 + 119886
22
1198941199031198940
(22)
where 119894 (119894 = 1 2 6) is the label corresponding to the 119894thregion
From Table 1 and Figure 5 we get the set of aerodynamicparameters at the point (119867119881) = (20 km 1000ms) as shownin Table 2
Choose the sampling period 119879119904 = 0025 s The discretestate-space expression is then given by
119909 (119896 + 1)
=
1198861119909 (119896) + 1119906 (119896) + 1198901 [1 0] 119909 (119896) le minus037
1198862119909 (119896) + 2119906 (119896) + 1198902 minus037 lt [1 0] 119909 (119896) le minus0153
1198863119909 (119896) + 3119906 (119896) + 1198903 minus0153 lt [1 0] 119909 (119896) le 0
1198864119909 (119896) + 4119906 (119896) + 1198904 0 lt [1 0] 119909 (119896) le 0153
1198865119909 (119896) + 5119906 (119896) + 1198905 0153 lt [1 0] 119909 (119896) le 037
1198866119909 (119896) + 6119906 (119896) + 1198906 [1 0] 119909 (119896) gt 037
(23)
119910 (119896) = [1 0] 119909 (119896) (24)
where
1198861 = [104 0025
022 0995] 1198862 = [
1051 0025
0218 0995]
1198863 = [1023 00252
0248 09951] 1198864 = [
09954 00248
02732 09954]
1198865 = [09697 00245
02913 09956] 1198866 = [
09594 00244
03137 09959]
1198901 = [minus00183
minus01123] 1198902 = [
minus00175
minus00792]
1198903 = [minus00131
minus00376] 1198904 = [
0
0]
1198905 = [minus00053
00454] 1198906 = [
minus00169
01193]
1 = [minus0028 159 times 10
minus6
minus2166 142 times 10minus4]
2 = [minus003 218 times 10
minus6
minus2224 187 times 10minus4]
International Journal of Aerospace Engineering 7
2
15
1
05
0
minus05
minus1
minus15minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (Q
SmV
)C120572 y
(a) Relation between 119862120572119910and 120572
0092
009
0088
0086
0084
0082
008
0078
0076
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (Q
SmV
)C120575119911y
(b) Relation between 119862120575119911119910 and 120572
125
12
115
11
105
10
95
9minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (Q
SLJz)m
120572 z
(c) Relation between119898120572119911and 120572
96
94
92
90
88
86
84minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (minusQSL
Jz)m
120575119911z
(d) Relation between119898120575119911119911 and 120572
1
09
08
07
06
05
04
03
02
01
Am
plifi
catio
n fa
ctorKF
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
(e) Relation between119870119865119910
and 120572
12
11
1
09
08
07
06
05
04
03
Am
plifi
catio
n fa
ctorKM119911
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
(f) Relation between119870119872119911
and 120572
Figure 5 Aerodynamic parameters as functions of angle of attack
8 International Journal of Aerospace Engineering
Table 2 Aerodynamic parameters of pitch channel
Aerodynamic parameter 119876119878119862120572
119910119898119881 119876119878119862
120575119911
119910119898119881 119876119878119871119898
120572
119911119869119911
119876119878119871119898119903
119911119869119911
119876119878119871119898120575119911
119911119869119911
120572 = minus053 minus1175 0076 947 minus032 minus8489
120572 = minus037 minus0944 0082 973 minus032 minus8924
120572 = minus0153 minus023 0082 1043 minus032 minus8938
120572 = 0 036 009 1101 minus032 minus9510
120572 = 0153 094 0082 1158 minus032 minus8934
120572 = 037 163 0082 1224 minus032 minus8918
3 = [minus003 268 times 10
minus6
minus2228 223 times 10minus4]
4 = [minus0032 277 times 10
minus6
minus2371 232 times 10minus4]
5 = [minus003 227 times 10
minus6
minus2228 198 times 10minus4]
6 = [minus0029 191 times 10
minus6
minus2224 173 times 10minus4]
(25)
32 Constraints Analysis Due to the symmetry of jet config-uration the set of possible negative pitch control force is givenby
119880119910minus
119865= minus119865119898 minus2119865119898 cos
120587
9 minus2119865119898 cos
120587
18 minus2119865119898 minus4119865119898 cos
120587
9
minus4119865119898 cos120587
18
(26)
By combining (13) and (26) we obtain the set of allpossible pitch control force
119880119910
119865= 119865119898 2119865119898 cos
120587
9 2119865119898 cos
120587
18 2119865119898 4119865119898 cos
120587
9
4119865119898 cos120587
18 minus119865119898 minus2119865119898 cos
120587
9 minus2119865119898 cos
120587
18 minus2119865119898
minus4119865119898 cos120587
9 minus4119865119898 cos
120587
18
(27)
Substituting the jet parameters shown in Table 1 into theforegoing set yields
119880119910
119865= 2200 4135 4333 4400 8269 8666 minus2200 minus4135
minus4333 minus4400 minus8269 minus8666
(28)
Noting that the lateral forces are discrete variable we willutilize the linear combination of logical variables to describethe lateral force In terms of piecewise affine model (20) we
introduce logical variables 120575119865119894
isin 0 1 119894 = 1 2 12 toexpress the lateral thrust 119865119910
119887
119865119910119887
= 22001205751198651
+ 41351205751198652
+ 43331205751198653
+ 44001205751198654
+ 82691205751198655
+ 86661205751198656
minus 22001205751198657
minus 41351205751198658
minus 43331205751198659
minus 440012057511986510
minus 826912057511986511
minus 866612057511986512
(29)
In (29) the logical variables should satisfy the constraints
12
sum
119894=1
120575119865119894
= 0 or 1 (30)
where 0 means that no lateral force is generated while 1
means that the applied lateral force equals to one element ofset 119880119910119865
Denote 1199061 = 120575119911 the control input 119906 in model (23) can berewritten as
119906 = [1199061 119865119910119887
]119879 (31)
As shown in Table 1 the constraints on system states andcontrol input are
119909min le 119909 (119896) le 119909max
1199061min le 1199061 (119896) le 1199061max(32)
where 119909min = [minus053 minus522]119879 119909max = [053 522]
119879 1199061min =
minus053 1199061max = 053According to (30) we have
12
sum
119894=1
120575119865119894
le 1 (33)
which shows the constraint on the logical control inputUse logical variables 120575119894(119896) isin 0 1 119894 = 1 2 5 to
describe the operation points which satisfy the constraints
[1 0] 119909 (119896) + 037 le 0 lArrrArr 1205751 (119896) = 1
[1 0] 119909 (119896) + 0153 le 0 lArrrArr 1205752 (119896) = 1
[1 0] 119909 (119896) le 0 lArrrArr 1205753 (119896) = 1
[1 0] 119909 (119896) minus 0153 le 0 lArrrArr 1205754 (119896) = 1
[1 0] 119909 (119896) minus 037 le 0 lArrrArr 1205755 (119896) = 1
(34)
International Journal of Aerospace Engineering 9
Equation (34) can be transformed into the followingequivalent mixed logical inequalities [13]
[1 0] 119909 (119896) + 037 ge 120576 + (1198981 minus 120576) 1205751 (119896)
[1 0] 119909 (119896) + 037 le 1198721 (1 minus 1205751 (119896))
[1 0] 119909 (119896) + 0153 ge 120576 + (1198982 minus 120576) 1205752 (119896)
[1 0] 119909 (119896) + 0153 le 1198722 (1 minus 1205752 (119896))
[1 0] 119909 (119896) ge 120576 + (1198983 minus 120576) 1205753 (119896)
[1 0] 119909 (119896) le 1198723 (1 minus 1205753 (119896))
[1 0] 119909 (119896) minus 0153 ge 120576 + (1198984 minus 120576) 1205754 (119896)
[1 0] 119909 (119896) minus 0153 le 1198724 (1 minus 1205754 (119896))
[1 0] 119909 (119896) minus 037 ge 120576 + (1198985 minus 120576) 1205755 (119896)
[1 0] 119909 (119896) minus 037 le 1198725 (1 minus 1205755 (119896))
(35)
where 1198981 = minus016 1198721 = 090 1198982 = minus0377 1198722 = 06831198983 = minus053 1198723 = 053 1198984 = minus0683 1198724 = 0377 1198985 =
minus0901198725 = 016 and 120576 = 10minus6
In addition we introduce the auxiliary logical variables120575119894(119896) isin 0 1 119894 = 6 9 as follows
1205756 (119896) = (1 minus 1205751 (119896)) 1205752 (119896)
1205757 (119896) = (1 minus 1205752 (119896)) 1205753 (119896)
1205758 (119896) = (1 minus 1205753 (119896)) 1205754 (119896)
1205759 (119896) = (1 minus 1205754 (119896)) 1205755 (119896)
(36)
With 1205751 1205756 1205757 1205758 1205759 and 1 minus 1205755 the six regions canbe presented Similarly (36) can be transformed into theequivalent mixed logical inequalities
minus1205751 (119896) + 1205752 (119896) minus 1205756 (119896) le 0
1205751 (119896) + 1205756 (119896) le 1
minus1205752 (119896) + 1205756 (119896) le 0
minus1205752 (119896) + 1205753 (119896) minus 1205757 (119896) le 0
1205752 (119896) + 1205757 (119896) le 1
minus1205753 (119896) + 1205757 (119896) le 0
minus1205753 (119896) + 1205754 (119896) minus 1205758 (119896) le 0
1205753 (119896) + 1205758 (119896) le 1
minus1205754 (119896) + 1205758 (119896) le 0
minus1205754 (119896) + 1205755 (119896) minus 1205759 (119896) le 0
1205754 (119896) + 1205759 (119896) le 1
minus1205755 (119896) + 1205759 (119896) le 0
(37)
To describe the state space model of each region weintroduce the following auxiliary continuous variables
1199111 (119896) = (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) 1205751 (119896)
1199112 (119896) = (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) 1205756 (119896)
1199113 (119896) = (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) 1205757 (119896)
1199114 (119896) = (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) 1205758 (119896)
1199115 (119896) = (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) 1205759 (119896)
1199116 (119896) = (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) (1 minus 1205755 (119896))
(38)
Equation (38) can be converted to the equivalent mixedlogical inequalities
1199111 (119896) ge (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) minus 1198721198911 (1 minus 1205751 (119896))
1199111 (119896) le (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) minus 1198981198911 (1 minus 1205751 (119896))
1199111 (119896) ge 11989811989111205751 (119896)
1199111 (119896) le 11987211989111205751 (119896)
1199112 (119896) ge (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) minus 1198721198912 (1 minus 1205756 (119896))
1199112 (119896) le (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) minus 1198981198912 (1 minus 1205756 (119896))
1199112 (119896) ge 11989811989121205756 (119896)
1199112 (119896) le 11987211989121205756 (119896)
1199113 (119896) ge (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) minus 1198721198913 (1 minus 1205757 (119896))
1199113 (119896) le (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) minus 1198981198913 (1 minus 1205757 (119896))
1199113 (119896) ge 11989811989131205757 (119896)
1199113 (119896) le 11987211989131205757 (119896)
1199114 (119896) ge (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) minus 1198721198914 (1 minus 1205758 (119896))
1199114 (119896) le (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) minus 1198981198914 (1 minus 1205758 (119896))
1199114 (119896) ge 11989811989141205758 (119896)
1199114 (119896) le 11987211989141205758 (119896)
1199115 (119896) ge (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) minus 1198721198915 (1 minus 1205759 (119896))
1199115 (119896) le (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) minus 1198981198915 (1 minus 1205759 (119896))
10 International Journal of Aerospace Engineering
1199115 (119896) ge 11989811989151205759 (119896)
1199115 (119896) le 11987211989151205759 (119896)
1199116 (119896) ge (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) minus 11987211989151205755 (119896)
1199116 (119896) le (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) minus 11989811989151205755 (119896)
1199116 (119896) ge 1198981198916 (1 minus 1205755 (119896))
1199116 (119896) le 1198721198916 (1 minus 1205755 (119896))
(39)
where1198721198911 = [073 1084]1198791198981198911 = [minus077 minus1106]
1198791198721198912 =[076 1166]
119879 1198981198912 = [minus079 minus 1256]119879 1198721198913 =
[077 1273]119879 1198981198913 = [minus078 minus 1280]
119879 1198721198914 =
[076 1403]119879 1198981198914 = [minus076 minus 1403]
119879 1198721198915 =
[0725 1291]119879 1198981198915 = [minus0736 minus 1205]
119879 1198721198916 =
[0696 1154]119879 and1198981198916 = [minus073 minus 1130]
119879Then the whole MLD model of the missile is given by
119909 (119896 + 1) =
6
sum
119894=1
119911119894 (119896)
119910 (119896) = [1 0] 119909 (119896)
st (28) (30) (32) (34) (36) (38)
(40)
where (29) (31) (33) (35) (37) and (39) represent all theconstraint inequalities
4 Autopilot Design UsingHybrid MPC Method
In general we expect that the output 119910 tracks its command 119910119888
as fast as possible with a small amount of fuel consumptionMotivated by this observation we consider the followingoptimization problem
119869lowast
= min119906(119896)119906(119896+1)120575(119896)120575(119896+1|119896)119911(119896)119911(119896+1|119896)
119873
sum
119894=1
(1003817100381710038171003817119910 (119896 + 119894 | 119896)
minus119910119888 (119896 + 119894)1003817100381710038171003817
2
119876
+ 119906(119896 + 119894)2
119877)
st MLD model (39)
1199061min le 1199061 (119896) 1199061 (119896 + 1) le 1199061max
119909min le 119909 (119896) 119909 (119896 + 1) le 119909max
(41)
where 119910119888 is the command for angle of attack 119910(119896 + 119894 | 119896) ispredictive value of angle of attack 119873 denotes the predictivehorizon 119876 and 119877 are the weighting matrices and 119877 =
diag(119877120575119911
119877119865119910
) 119877120575119911
119877119865119910
are weighted coefficients of aerody-namic control surfaces and lateral pulse jets respectivelyThe
ratio of 119877120575119911
and 119877119865119910
represents the control allocation betweenaerodynamic control surfaces and lateral pulse jets When119877119865119910
119877120575119911
is increased the requirement for lateral force will bedeclined that is the fuel consumption can be lessened Inaddition the deduction can be verified from the simulationresults of Case 1 and Case 2
Different control allocation between the dual actuators(aerodynamic control surfaces and lateral pulse jets) can beobtained by setting different 119876 and 119877 Since both logicaland continuous variables are involved in (41) the aboveon-line optimization problem is a mixed integer quadraticprogramming (MIQP) problemwhich can be solved by usingthe hybrid MPC toolbox of MATLAB [14 15]
Remark 2 In an explicit MPC controller the main factorsaffecting the number of subregions include the systemdimen-sion the predictive horizon and the number of constrains Inthis paper the blendedmissile with aerodynamic control sur-faces and lateral jets is investigated To deal with the discreteproperty of the lateral jet forces some logical variables areintroduced for MPC controller design which increases thenumber of subregions inevitably
5 Numerical Simulations
51 Case 1 Numerical simulations are performed to ver-ify the feasibility of the proposed method in this sectionThe involved parameters are given in Table 1 The weightmatrices are set as 119876 = 10 119877120575
119911
= 0025 and 119877119865119910
=
diag(0005 0005 0005) Suppose the initial state is 1205720 =0 1199030 = 0 In order to avoid excessive computational load wechoose predictive horizon119873 = 2 and control horizon119872 = 2The command for angle of attack is 120572119888 = 02 rad
Explicit form of the optimal controller is provided byhybrid toolbox which is not given here for simplicity Insteadwe present the partition results associated with the controllerin Figure 6 where 4190 subregions are obtained and for eachsubregion a control law of the form 119906 = 119870119909 + 119887 is givenAs a benefit of using explicit MPC the controller parameters119870 and 119887 for all the subregions are obtained simultaneouslyonce the optimization problem is solved This property isobviously different from that of gain-scheduled controller(where the controller parameters for different regions areseparately determined)
However by a simple calculation we conclude that thesesubregions donot require toomuch storage space (the neededstorage space is approximately 14 times 8 times 4190 = 450KB)Moreover it should be noted that when the algorithm isimplemented in practice much more time will be needed toidentify which subregion the current states enter into This isanother important factor that affects the computational costof the proposed algorithm
The simulation results are shown in Figures 7ndash9 It isseen from Figure 7 that the actual angle of attack tracksthe command in less than 01 seconds As shown in Figures8 and 9 the aerodynamic force converges to a constant astime increases while the jets are only activated during thebeginning period (when the tracking error is obvious)
International Journal of Aerospace Engineering 11
58
68
73
108
174
180
245
252
254
270
271
272
273
274
276
277
299
300
301
302
06
04
02
0
minus02
minus04
Elev
ator
defl
ectio
n (r
ad)
Angle of attack (rad)minus04 minus02 0 02 04 06
1634
1635
1638
1648
1649
1650
1664
1673
1677
1678
1679
1712
1726
1743
1744
1746
1748
1751
1752
1983
1985
1993
2011
Late
ral f
orce
(N)
Angle of attack (rad)minus04 minus02 0 02 04 06
1000
800
600
400
200
0
minus200
minus400
minus600
minus800
minus1000
Polyhedral partitionmdash4190 regions Polyhedral partitionmdash4190 regions
Figure 6 The partition associated with the explicit controller
025
02
015
01
005
0
ActualCommand
0 02 04 06 08 1
Time (s)
Ang
le o
f atta
ck (r
ad)
Figure 7 The response of angle of attack
52 Case 2 The results for the case with a different weight119877120575119911
= 0005 are shown in Figures 10ndash12 It is seen that adifferent control allocation result is obtained
04
02
0
minus02
minus04
minus060 02 04 06 08 1
Time (s)
Elev
ator
defl
ectio
n (r
ad)
Figure 8 The response of elevator deflection
53 Case 3 In this case a different command 120572119888 =
02 cos(05120587119905) rad is considered and the weight matrices arethe same as the ones for Case 1 The simulation results areshown in Figures 13ndash15
It is seen from Figure 13 that asymptotic tracking is alsoachievedThemethod proposed in this paper can realize both
12 International Journal of Aerospace Engineering
1
05
0
minus05
minus1
times104
0 02 04 06 08 1
Time (s)
Late
ral f
orce
(N)
Figure 9 The response of lateral force
025
02
015
01
005
0
Ang
le o
f atta
ck (r
ad)
0 02 04 06 08 1
Time (s)
ActualCommand
Figure 10 The response of angle of attack
06
04
02
0
minus02
minus04
minus06
minus08
Elev
ator
defl
ectio
n (r
ad)
0 02 04 06 08 1
Time (s)
Figure 11 The response of elevator deflection
1
05
0
minus05
minus1
Late
ral f
orce
(N)
times104
0 02 04 06 08 1
Time (s)
Figure 12 The response of lateral force
03
025
02
015
01
005
0
minus005
minus01
minus015
minus02
Ang
le o
f atta
ck (r
ad)
0 05 1 15 2 25 3 35 4
Time (s)
ActualCommand
Figure 13 The response of angle of attack
06
04
02
0
minus02
minus04
minus06
minus08
Elev
ator
defl
ectio
n (r
ad)
0 05 1 15 2 25 3 35 4
Time (s)
Figure 14 The response of elevator deflection
International Journal of Aerospace Engineering 13
1
08
06
04
02
0
minus02
minus04
minus06
minus08
minus1
Late
ral f
orce
(N)
0 05 1 15 2 25 3 35 4
Time (s)
times104
Figure 15 The response of lateral force
fast tracking command and control allocation It is seen fromFigure 15 that the jets are activated while the tracking erroris obvious or command is varying rapidly
6 Conclusion
An autopilot design method for a missile with aerodynamiccontrol surfaces and lateral jets is presented in this paperThe nonlinear attitude control model is reduced to an MLDmodel Meanwhile the lateral force is described as linearcombination of logical variables due to the discrete values oflateral force Then the whole MLD model of attitude controlsystem is derived Autopilot design is accomplished usinghybrid MPC method By setting the related weighted coeffi-cients in index function the control allocation is obtainedMoreover numerical simulations are performed under thedifferent conditions the performance of tracking the attitudecommand and control allocation is verified and the explicitform of the control law can be obtained as well
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research presented in this document is supportedby the National Natural Science Foundation of Chinaunder Grant nos 61104193 61203191 and 61333001 theFundamental Research Funds for the Central Universities(HITNSRIF2012032) the Program for IBRSEM in HarbinInstitute of Technology under Grant HITIBRSEMA201415and the Foundation of Supporting Technology for Aerospaceunder Grant 2014-HT-HGD7
References
[1] R Hirokawa K Sato and S Manabe ldquoAutopilot design fora missile with reaction-jet using coefficient diagram methodrdquoin Proceedings of the AIAA Guidance Navigation and ControlConference and Exhibit 2001 August 2001
[2] P K Menon and V R Iragavarapu Adaptive Techniques forMultiple Actuator Blending Defense Technical InformationCenter 1998
[3] A G Munson and M W Garbrick ldquoJet interaction investiga-tionrdquo Report OR-9933 Martin Marietta Orlando Fla USA1969
[4] M Graham and P Weinacht ldquoNumerical simulation of lateralcontrol jetsrdquo in Proceedings of the 37th Aerospace SciencesMeeting and Exhibit 1999 AIAA Paper
[5] J S Shamma and J R Cloutier ldquoGain-scheduledmissile autopi-lot design using linear parameter varying transformationsrdquoJournal of Guidance Control and Dynamics vol 16 no 2 pp256ndash263 1993
[6] M Innocenti and A Thukral ldquoSimultaneous reaction jet andaerodynamic control of missile systemsrdquo AlAA 93-3739-CP1993
[7] D B Ridgely Y Lee and T Fanciullo ldquoDual aeropropulsivemissile control-optimal control and control allocationrdquo inProceedings of the AIAA Guidance Navigation and ControlConference and Exhibit Keystone Colo USA 2006
[8] D B Ridgely D Drake L Triplett and C Geise ldquoDynamiccontrol allocation of a missile with tails and reaction jetsrdquo inProceedings of the AIAA Guidance Navigation and ControlConference pp 3158ndash3189 August 2007
[9] D Q Mayne J B Rawlings C V Rao and P O ScokaertldquoConstrained model predictive control stability and optimal-ityrdquo Automatica vol 36 no 6 pp 789ndash814 2000
[10] A Bemporad F Borrelli and M Morari ldquoModel predictivecontrol based on linear programmingmdashthe explicit solutionrdquoIEEE Transactions on Automatic Control vol 47 no 12 pp1974ndash1985 2002
[11] C Jouannet and P Krus ldquoModelling of high angle of attackaerodynamicrdquo in Proceedings of the 25th AIAA Applied Aerody-namics Conference pp 1481ndash1516 June 2007
[12] S Venugopal and M Krishnamurthy ldquoMissile aerodynamics athigh angles of attack a prediction coderdquo Journal of Spacecraftand Rockets vol 32 no 2 pp 263ndash269 1995
[13] A Bemporad ldquoEfficient conversion of mixed logical dynamicalsystems into an equivalent piecewise affine formrdquo IEEE Trans-actions on Automatic Control vol 49 no 5 pp 832ndash838 2004
[14] F D Torrisi andA Bemporad ldquoHYSDELmdasha tool for generatingcomputational hybrid models for analysis and synthesis prob-lemsrdquo IEEE Transactions on Control Systems Technology vol 12no 2 pp 235ndash249 2004
[15] A Bemporad W P M H Heemels and B De SchutterldquoOn hybrid systems and closed-loop MPC systemsrdquo IEEETransactions on Automatic Control vol 47 no 5 pp 863ndash8692002
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 International Journal of Aerospace Engineering
mainly affected by the angle of attack 120572 The relationshipsbetween them are shown in Figure 5
In practical application since 120572 is the main factor thatleads to system nonlinearities the system model is usuallylinearized if 120572 varies in small range As seen from Figure 5curves of the relation between aerodynamic parametersand angle of attack can be expressed by six line segmentsapproximately Here we choose 120572 = minus037 rad minus0153 rad0 0153 rad and 037 rad as the operation points and dividethe whole operation region into six subregions As a resultthe original model (17) can be converted to the followingpiecewise affine models
=
1198861119909 + 1198871119906 + 1198901 [1 0] 119909 le minus037
1198862119909 + 1198872119906 + 1198902 minus037 lt [1 0] 119909 le minus0153
1198863119909 + 1198873119906 + 1198903 minus0153 lt [1 0] 119909 le 0
1198864119909 + 1198874119906 + 1198904 0 lt [1 0] 119909 le 0153
1198865119909 + 1198875119906 + 1198905 0153 lt [1 0] 119909 le 037
1198866119909 + 1198876119906 + 1198906 [1 0] 119909 gt 037
(20)
119910 = [1 0] 119909 (21)
where
119886119894 =120597119891(119909)
120597119909
10038161003816100381610038161003816100381610038161003816119909=1199091198940
= [11988611
11989411988612
119894
11988621
11989411988622
119894
]
119887119894 = 119892 (1199091198940) = [11988711
11989411988712
119894
11988721
11989411988722
119894
] 119890119894 = [1198901
119894
1198902
119894
]
11988611
119894=
1205971198911 (119909)
120597120572
10038161003816100381610038161003816100381610038161003816119909=1199091198940
= minus119876119878
119898119881(
120597119862120572
119910
120597120572
1003816100381610038161003816100381610038161003816100381610038161003816120572=1205721198940
1205721198940 cos1205721198940 + 119862120572
119910(1205721198940) cos1205721198940
minus 119862120572
119910(1205721198940) 1205721198940 sin1205721198940)
11988612
119894=
1205971198911(119909)
120597119903
10038161003816100381610038161003816100381610038161003816119909=1199091198940
= 1
11988621
119894=
1205971198912 (119909)
120597120572
10038161003816100381610038161003816100381610038161003816119909=1199091198940
=119876119878119871
119869119911
(120597119898120572
119911
120597120572
100381610038161003816100381610038161003816100381610038161003816120572=1205721198940
1205721198940 + 119898120572
119911(1205721198940) +
120597119898119903
119911
120597120572
100381610038161003816100381610038161003816100381610038161003816120572=1205721198940
1199031198940)
11988622
119894=
1205971198912(119909)
120597119903
10038161003816100381610038161003816100381610038161003816119909=1199091198940
=119876119878119871
119869119911
119898120572
119911(1205721198940)
11988711
119894= minus
119876119878119862120575119911
119910(1205721198940) cos1205721198940119898119881
11988712
119894= minus
(1 + 119870119865119910
(1205721198940)) cos1205721198940119898119881
11988721
119894=
119876119878119871119898120575119911
119911(1205721198940)
119869119911
11988722
119894=
(1 + 119870119872119911
(1205721198940)) 119897
119869119911
1198901
119894= 11988611
1198941205721198940 + 119886
12
1198941199031198940
1198902
119894= 11988621
1198941205721198940 + 119886
22
1198941199031198940
(22)
where 119894 (119894 = 1 2 6) is the label corresponding to the 119894thregion
From Table 1 and Figure 5 we get the set of aerodynamicparameters at the point (119867119881) = (20 km 1000ms) as shownin Table 2
Choose the sampling period 119879119904 = 0025 s The discretestate-space expression is then given by
119909 (119896 + 1)
=
1198861119909 (119896) + 1119906 (119896) + 1198901 [1 0] 119909 (119896) le minus037
1198862119909 (119896) + 2119906 (119896) + 1198902 minus037 lt [1 0] 119909 (119896) le minus0153
1198863119909 (119896) + 3119906 (119896) + 1198903 minus0153 lt [1 0] 119909 (119896) le 0
1198864119909 (119896) + 4119906 (119896) + 1198904 0 lt [1 0] 119909 (119896) le 0153
1198865119909 (119896) + 5119906 (119896) + 1198905 0153 lt [1 0] 119909 (119896) le 037
1198866119909 (119896) + 6119906 (119896) + 1198906 [1 0] 119909 (119896) gt 037
(23)
119910 (119896) = [1 0] 119909 (119896) (24)
where
1198861 = [104 0025
022 0995] 1198862 = [
1051 0025
0218 0995]
1198863 = [1023 00252
0248 09951] 1198864 = [
09954 00248
02732 09954]
1198865 = [09697 00245
02913 09956] 1198866 = [
09594 00244
03137 09959]
1198901 = [minus00183
minus01123] 1198902 = [
minus00175
minus00792]
1198903 = [minus00131
minus00376] 1198904 = [
0
0]
1198905 = [minus00053
00454] 1198906 = [
minus00169
01193]
1 = [minus0028 159 times 10
minus6
minus2166 142 times 10minus4]
2 = [minus003 218 times 10
minus6
minus2224 187 times 10minus4]
International Journal of Aerospace Engineering 7
2
15
1
05
0
minus05
minus1
minus15minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (Q
SmV
)C120572 y
(a) Relation between 119862120572119910and 120572
0092
009
0088
0086
0084
0082
008
0078
0076
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (Q
SmV
)C120575119911y
(b) Relation between 119862120575119911119910 and 120572
125
12
115
11
105
10
95
9minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (Q
SLJz)m
120572 z
(c) Relation between119898120572119911and 120572
96
94
92
90
88
86
84minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (minusQSL
Jz)m
120575119911z
(d) Relation between119898120575119911119911 and 120572
1
09
08
07
06
05
04
03
02
01
Am
plifi
catio
n fa
ctorKF
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
(e) Relation between119870119865119910
and 120572
12
11
1
09
08
07
06
05
04
03
Am
plifi
catio
n fa
ctorKM119911
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
(f) Relation between119870119872119911
and 120572
Figure 5 Aerodynamic parameters as functions of angle of attack
8 International Journal of Aerospace Engineering
Table 2 Aerodynamic parameters of pitch channel
Aerodynamic parameter 119876119878119862120572
119910119898119881 119876119878119862
120575119911
119910119898119881 119876119878119871119898
120572
119911119869119911
119876119878119871119898119903
119911119869119911
119876119878119871119898120575119911
119911119869119911
120572 = minus053 minus1175 0076 947 minus032 minus8489
120572 = minus037 minus0944 0082 973 minus032 minus8924
120572 = minus0153 minus023 0082 1043 minus032 minus8938
120572 = 0 036 009 1101 minus032 minus9510
120572 = 0153 094 0082 1158 minus032 minus8934
120572 = 037 163 0082 1224 minus032 minus8918
3 = [minus003 268 times 10
minus6
minus2228 223 times 10minus4]
4 = [minus0032 277 times 10
minus6
minus2371 232 times 10minus4]
5 = [minus003 227 times 10
minus6
minus2228 198 times 10minus4]
6 = [minus0029 191 times 10
minus6
minus2224 173 times 10minus4]
(25)
32 Constraints Analysis Due to the symmetry of jet config-uration the set of possible negative pitch control force is givenby
119880119910minus
119865= minus119865119898 minus2119865119898 cos
120587
9 minus2119865119898 cos
120587
18 minus2119865119898 minus4119865119898 cos
120587
9
minus4119865119898 cos120587
18
(26)
By combining (13) and (26) we obtain the set of allpossible pitch control force
119880119910
119865= 119865119898 2119865119898 cos
120587
9 2119865119898 cos
120587
18 2119865119898 4119865119898 cos
120587
9
4119865119898 cos120587
18 minus119865119898 minus2119865119898 cos
120587
9 minus2119865119898 cos
120587
18 minus2119865119898
minus4119865119898 cos120587
9 minus4119865119898 cos
120587
18
(27)
Substituting the jet parameters shown in Table 1 into theforegoing set yields
119880119910
119865= 2200 4135 4333 4400 8269 8666 minus2200 minus4135
minus4333 minus4400 minus8269 minus8666
(28)
Noting that the lateral forces are discrete variable we willutilize the linear combination of logical variables to describethe lateral force In terms of piecewise affine model (20) we
introduce logical variables 120575119865119894
isin 0 1 119894 = 1 2 12 toexpress the lateral thrust 119865119910
119887
119865119910119887
= 22001205751198651
+ 41351205751198652
+ 43331205751198653
+ 44001205751198654
+ 82691205751198655
+ 86661205751198656
minus 22001205751198657
minus 41351205751198658
minus 43331205751198659
minus 440012057511986510
minus 826912057511986511
minus 866612057511986512
(29)
In (29) the logical variables should satisfy the constraints
12
sum
119894=1
120575119865119894
= 0 or 1 (30)
where 0 means that no lateral force is generated while 1
means that the applied lateral force equals to one element ofset 119880119910119865
Denote 1199061 = 120575119911 the control input 119906 in model (23) can berewritten as
119906 = [1199061 119865119910119887
]119879 (31)
As shown in Table 1 the constraints on system states andcontrol input are
119909min le 119909 (119896) le 119909max
1199061min le 1199061 (119896) le 1199061max(32)
where 119909min = [minus053 minus522]119879 119909max = [053 522]
119879 1199061min =
minus053 1199061max = 053According to (30) we have
12
sum
119894=1
120575119865119894
le 1 (33)
which shows the constraint on the logical control inputUse logical variables 120575119894(119896) isin 0 1 119894 = 1 2 5 to
describe the operation points which satisfy the constraints
[1 0] 119909 (119896) + 037 le 0 lArrrArr 1205751 (119896) = 1
[1 0] 119909 (119896) + 0153 le 0 lArrrArr 1205752 (119896) = 1
[1 0] 119909 (119896) le 0 lArrrArr 1205753 (119896) = 1
[1 0] 119909 (119896) minus 0153 le 0 lArrrArr 1205754 (119896) = 1
[1 0] 119909 (119896) minus 037 le 0 lArrrArr 1205755 (119896) = 1
(34)
International Journal of Aerospace Engineering 9
Equation (34) can be transformed into the followingequivalent mixed logical inequalities [13]
[1 0] 119909 (119896) + 037 ge 120576 + (1198981 minus 120576) 1205751 (119896)
[1 0] 119909 (119896) + 037 le 1198721 (1 minus 1205751 (119896))
[1 0] 119909 (119896) + 0153 ge 120576 + (1198982 minus 120576) 1205752 (119896)
[1 0] 119909 (119896) + 0153 le 1198722 (1 minus 1205752 (119896))
[1 0] 119909 (119896) ge 120576 + (1198983 minus 120576) 1205753 (119896)
[1 0] 119909 (119896) le 1198723 (1 minus 1205753 (119896))
[1 0] 119909 (119896) minus 0153 ge 120576 + (1198984 minus 120576) 1205754 (119896)
[1 0] 119909 (119896) minus 0153 le 1198724 (1 minus 1205754 (119896))
[1 0] 119909 (119896) minus 037 ge 120576 + (1198985 minus 120576) 1205755 (119896)
[1 0] 119909 (119896) minus 037 le 1198725 (1 minus 1205755 (119896))
(35)
where 1198981 = minus016 1198721 = 090 1198982 = minus0377 1198722 = 06831198983 = minus053 1198723 = 053 1198984 = minus0683 1198724 = 0377 1198985 =
minus0901198725 = 016 and 120576 = 10minus6
In addition we introduce the auxiliary logical variables120575119894(119896) isin 0 1 119894 = 6 9 as follows
1205756 (119896) = (1 minus 1205751 (119896)) 1205752 (119896)
1205757 (119896) = (1 minus 1205752 (119896)) 1205753 (119896)
1205758 (119896) = (1 minus 1205753 (119896)) 1205754 (119896)
1205759 (119896) = (1 minus 1205754 (119896)) 1205755 (119896)
(36)
With 1205751 1205756 1205757 1205758 1205759 and 1 minus 1205755 the six regions canbe presented Similarly (36) can be transformed into theequivalent mixed logical inequalities
minus1205751 (119896) + 1205752 (119896) minus 1205756 (119896) le 0
1205751 (119896) + 1205756 (119896) le 1
minus1205752 (119896) + 1205756 (119896) le 0
minus1205752 (119896) + 1205753 (119896) minus 1205757 (119896) le 0
1205752 (119896) + 1205757 (119896) le 1
minus1205753 (119896) + 1205757 (119896) le 0
minus1205753 (119896) + 1205754 (119896) minus 1205758 (119896) le 0
1205753 (119896) + 1205758 (119896) le 1
minus1205754 (119896) + 1205758 (119896) le 0
minus1205754 (119896) + 1205755 (119896) minus 1205759 (119896) le 0
1205754 (119896) + 1205759 (119896) le 1
minus1205755 (119896) + 1205759 (119896) le 0
(37)
To describe the state space model of each region weintroduce the following auxiliary continuous variables
1199111 (119896) = (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) 1205751 (119896)
1199112 (119896) = (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) 1205756 (119896)
1199113 (119896) = (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) 1205757 (119896)
1199114 (119896) = (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) 1205758 (119896)
1199115 (119896) = (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) 1205759 (119896)
1199116 (119896) = (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) (1 minus 1205755 (119896))
(38)
Equation (38) can be converted to the equivalent mixedlogical inequalities
1199111 (119896) ge (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) minus 1198721198911 (1 minus 1205751 (119896))
1199111 (119896) le (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) minus 1198981198911 (1 minus 1205751 (119896))
1199111 (119896) ge 11989811989111205751 (119896)
1199111 (119896) le 11987211989111205751 (119896)
1199112 (119896) ge (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) minus 1198721198912 (1 minus 1205756 (119896))
1199112 (119896) le (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) minus 1198981198912 (1 minus 1205756 (119896))
1199112 (119896) ge 11989811989121205756 (119896)
1199112 (119896) le 11987211989121205756 (119896)
1199113 (119896) ge (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) minus 1198721198913 (1 minus 1205757 (119896))
1199113 (119896) le (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) minus 1198981198913 (1 minus 1205757 (119896))
1199113 (119896) ge 11989811989131205757 (119896)
1199113 (119896) le 11987211989131205757 (119896)
1199114 (119896) ge (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) minus 1198721198914 (1 minus 1205758 (119896))
1199114 (119896) le (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) minus 1198981198914 (1 minus 1205758 (119896))
1199114 (119896) ge 11989811989141205758 (119896)
1199114 (119896) le 11987211989141205758 (119896)
1199115 (119896) ge (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) minus 1198721198915 (1 minus 1205759 (119896))
1199115 (119896) le (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) minus 1198981198915 (1 minus 1205759 (119896))
10 International Journal of Aerospace Engineering
1199115 (119896) ge 11989811989151205759 (119896)
1199115 (119896) le 11987211989151205759 (119896)
1199116 (119896) ge (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) minus 11987211989151205755 (119896)
1199116 (119896) le (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) minus 11989811989151205755 (119896)
1199116 (119896) ge 1198981198916 (1 minus 1205755 (119896))
1199116 (119896) le 1198721198916 (1 minus 1205755 (119896))
(39)
where1198721198911 = [073 1084]1198791198981198911 = [minus077 minus1106]
1198791198721198912 =[076 1166]
119879 1198981198912 = [minus079 minus 1256]119879 1198721198913 =
[077 1273]119879 1198981198913 = [minus078 minus 1280]
119879 1198721198914 =
[076 1403]119879 1198981198914 = [minus076 minus 1403]
119879 1198721198915 =
[0725 1291]119879 1198981198915 = [minus0736 minus 1205]
119879 1198721198916 =
[0696 1154]119879 and1198981198916 = [minus073 minus 1130]
119879Then the whole MLD model of the missile is given by
119909 (119896 + 1) =
6
sum
119894=1
119911119894 (119896)
119910 (119896) = [1 0] 119909 (119896)
st (28) (30) (32) (34) (36) (38)
(40)
where (29) (31) (33) (35) (37) and (39) represent all theconstraint inequalities
4 Autopilot Design UsingHybrid MPC Method
In general we expect that the output 119910 tracks its command 119910119888
as fast as possible with a small amount of fuel consumptionMotivated by this observation we consider the followingoptimization problem
119869lowast
= min119906(119896)119906(119896+1)120575(119896)120575(119896+1|119896)119911(119896)119911(119896+1|119896)
119873
sum
119894=1
(1003817100381710038171003817119910 (119896 + 119894 | 119896)
minus119910119888 (119896 + 119894)1003817100381710038171003817
2
119876
+ 119906(119896 + 119894)2
119877)
st MLD model (39)
1199061min le 1199061 (119896) 1199061 (119896 + 1) le 1199061max
119909min le 119909 (119896) 119909 (119896 + 1) le 119909max
(41)
where 119910119888 is the command for angle of attack 119910(119896 + 119894 | 119896) ispredictive value of angle of attack 119873 denotes the predictivehorizon 119876 and 119877 are the weighting matrices and 119877 =
diag(119877120575119911
119877119865119910
) 119877120575119911
119877119865119910
are weighted coefficients of aerody-namic control surfaces and lateral pulse jets respectivelyThe
ratio of 119877120575119911
and 119877119865119910
represents the control allocation betweenaerodynamic control surfaces and lateral pulse jets When119877119865119910
119877120575119911
is increased the requirement for lateral force will bedeclined that is the fuel consumption can be lessened Inaddition the deduction can be verified from the simulationresults of Case 1 and Case 2
Different control allocation between the dual actuators(aerodynamic control surfaces and lateral pulse jets) can beobtained by setting different 119876 and 119877 Since both logicaland continuous variables are involved in (41) the aboveon-line optimization problem is a mixed integer quadraticprogramming (MIQP) problemwhich can be solved by usingthe hybrid MPC toolbox of MATLAB [14 15]
Remark 2 In an explicit MPC controller the main factorsaffecting the number of subregions include the systemdimen-sion the predictive horizon and the number of constrains Inthis paper the blendedmissile with aerodynamic control sur-faces and lateral jets is investigated To deal with the discreteproperty of the lateral jet forces some logical variables areintroduced for MPC controller design which increases thenumber of subregions inevitably
5 Numerical Simulations
51 Case 1 Numerical simulations are performed to ver-ify the feasibility of the proposed method in this sectionThe involved parameters are given in Table 1 The weightmatrices are set as 119876 = 10 119877120575
119911
= 0025 and 119877119865119910
=
diag(0005 0005 0005) Suppose the initial state is 1205720 =0 1199030 = 0 In order to avoid excessive computational load wechoose predictive horizon119873 = 2 and control horizon119872 = 2The command for angle of attack is 120572119888 = 02 rad
Explicit form of the optimal controller is provided byhybrid toolbox which is not given here for simplicity Insteadwe present the partition results associated with the controllerin Figure 6 where 4190 subregions are obtained and for eachsubregion a control law of the form 119906 = 119870119909 + 119887 is givenAs a benefit of using explicit MPC the controller parameters119870 and 119887 for all the subregions are obtained simultaneouslyonce the optimization problem is solved This property isobviously different from that of gain-scheduled controller(where the controller parameters for different regions areseparately determined)
However by a simple calculation we conclude that thesesubregions donot require toomuch storage space (the neededstorage space is approximately 14 times 8 times 4190 = 450KB)Moreover it should be noted that when the algorithm isimplemented in practice much more time will be needed toidentify which subregion the current states enter into This isanother important factor that affects the computational costof the proposed algorithm
The simulation results are shown in Figures 7ndash9 It isseen from Figure 7 that the actual angle of attack tracksthe command in less than 01 seconds As shown in Figures8 and 9 the aerodynamic force converges to a constant astime increases while the jets are only activated during thebeginning period (when the tracking error is obvious)
International Journal of Aerospace Engineering 11
58
68
73
108
174
180
245
252
254
270
271
272
273
274
276
277
299
300
301
302
06
04
02
0
minus02
minus04
Elev
ator
defl
ectio
n (r
ad)
Angle of attack (rad)minus04 minus02 0 02 04 06
1634
1635
1638
1648
1649
1650
1664
1673
1677
1678
1679
1712
1726
1743
1744
1746
1748
1751
1752
1983
1985
1993
2011
Late
ral f
orce
(N)
Angle of attack (rad)minus04 minus02 0 02 04 06
1000
800
600
400
200
0
minus200
minus400
minus600
minus800
minus1000
Polyhedral partitionmdash4190 regions Polyhedral partitionmdash4190 regions
Figure 6 The partition associated with the explicit controller
025
02
015
01
005
0
ActualCommand
0 02 04 06 08 1
Time (s)
Ang
le o
f atta
ck (r
ad)
Figure 7 The response of angle of attack
52 Case 2 The results for the case with a different weight119877120575119911
= 0005 are shown in Figures 10ndash12 It is seen that adifferent control allocation result is obtained
04
02
0
minus02
minus04
minus060 02 04 06 08 1
Time (s)
Elev
ator
defl
ectio
n (r
ad)
Figure 8 The response of elevator deflection
53 Case 3 In this case a different command 120572119888 =
02 cos(05120587119905) rad is considered and the weight matrices arethe same as the ones for Case 1 The simulation results areshown in Figures 13ndash15
It is seen from Figure 13 that asymptotic tracking is alsoachievedThemethod proposed in this paper can realize both
12 International Journal of Aerospace Engineering
1
05
0
minus05
minus1
times104
0 02 04 06 08 1
Time (s)
Late
ral f
orce
(N)
Figure 9 The response of lateral force
025
02
015
01
005
0
Ang
le o
f atta
ck (r
ad)
0 02 04 06 08 1
Time (s)
ActualCommand
Figure 10 The response of angle of attack
06
04
02
0
minus02
minus04
minus06
minus08
Elev
ator
defl
ectio
n (r
ad)
0 02 04 06 08 1
Time (s)
Figure 11 The response of elevator deflection
1
05
0
minus05
minus1
Late
ral f
orce
(N)
times104
0 02 04 06 08 1
Time (s)
Figure 12 The response of lateral force
03
025
02
015
01
005
0
minus005
minus01
minus015
minus02
Ang
le o
f atta
ck (r
ad)
0 05 1 15 2 25 3 35 4
Time (s)
ActualCommand
Figure 13 The response of angle of attack
06
04
02
0
minus02
minus04
minus06
minus08
Elev
ator
defl
ectio
n (r
ad)
0 05 1 15 2 25 3 35 4
Time (s)
Figure 14 The response of elevator deflection
International Journal of Aerospace Engineering 13
1
08
06
04
02
0
minus02
minus04
minus06
minus08
minus1
Late
ral f
orce
(N)
0 05 1 15 2 25 3 35 4
Time (s)
times104
Figure 15 The response of lateral force
fast tracking command and control allocation It is seen fromFigure 15 that the jets are activated while the tracking erroris obvious or command is varying rapidly
6 Conclusion
An autopilot design method for a missile with aerodynamiccontrol surfaces and lateral jets is presented in this paperThe nonlinear attitude control model is reduced to an MLDmodel Meanwhile the lateral force is described as linearcombination of logical variables due to the discrete values oflateral force Then the whole MLD model of attitude controlsystem is derived Autopilot design is accomplished usinghybrid MPC method By setting the related weighted coeffi-cients in index function the control allocation is obtainedMoreover numerical simulations are performed under thedifferent conditions the performance of tracking the attitudecommand and control allocation is verified and the explicitform of the control law can be obtained as well
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research presented in this document is supportedby the National Natural Science Foundation of Chinaunder Grant nos 61104193 61203191 and 61333001 theFundamental Research Funds for the Central Universities(HITNSRIF2012032) the Program for IBRSEM in HarbinInstitute of Technology under Grant HITIBRSEMA201415and the Foundation of Supporting Technology for Aerospaceunder Grant 2014-HT-HGD7
References
[1] R Hirokawa K Sato and S Manabe ldquoAutopilot design fora missile with reaction-jet using coefficient diagram methodrdquoin Proceedings of the AIAA Guidance Navigation and ControlConference and Exhibit 2001 August 2001
[2] P K Menon and V R Iragavarapu Adaptive Techniques forMultiple Actuator Blending Defense Technical InformationCenter 1998
[3] A G Munson and M W Garbrick ldquoJet interaction investiga-tionrdquo Report OR-9933 Martin Marietta Orlando Fla USA1969
[4] M Graham and P Weinacht ldquoNumerical simulation of lateralcontrol jetsrdquo in Proceedings of the 37th Aerospace SciencesMeeting and Exhibit 1999 AIAA Paper
[5] J S Shamma and J R Cloutier ldquoGain-scheduledmissile autopi-lot design using linear parameter varying transformationsrdquoJournal of Guidance Control and Dynamics vol 16 no 2 pp256ndash263 1993
[6] M Innocenti and A Thukral ldquoSimultaneous reaction jet andaerodynamic control of missile systemsrdquo AlAA 93-3739-CP1993
[7] D B Ridgely Y Lee and T Fanciullo ldquoDual aeropropulsivemissile control-optimal control and control allocationrdquo inProceedings of the AIAA Guidance Navigation and ControlConference and Exhibit Keystone Colo USA 2006
[8] D B Ridgely D Drake L Triplett and C Geise ldquoDynamiccontrol allocation of a missile with tails and reaction jetsrdquo inProceedings of the AIAA Guidance Navigation and ControlConference pp 3158ndash3189 August 2007
[9] D Q Mayne J B Rawlings C V Rao and P O ScokaertldquoConstrained model predictive control stability and optimal-ityrdquo Automatica vol 36 no 6 pp 789ndash814 2000
[10] A Bemporad F Borrelli and M Morari ldquoModel predictivecontrol based on linear programmingmdashthe explicit solutionrdquoIEEE Transactions on Automatic Control vol 47 no 12 pp1974ndash1985 2002
[11] C Jouannet and P Krus ldquoModelling of high angle of attackaerodynamicrdquo in Proceedings of the 25th AIAA Applied Aerody-namics Conference pp 1481ndash1516 June 2007
[12] S Venugopal and M Krishnamurthy ldquoMissile aerodynamics athigh angles of attack a prediction coderdquo Journal of Spacecraftand Rockets vol 32 no 2 pp 263ndash269 1995
[13] A Bemporad ldquoEfficient conversion of mixed logical dynamicalsystems into an equivalent piecewise affine formrdquo IEEE Trans-actions on Automatic Control vol 49 no 5 pp 832ndash838 2004
[14] F D Torrisi andA Bemporad ldquoHYSDELmdasha tool for generatingcomputational hybrid models for analysis and synthesis prob-lemsrdquo IEEE Transactions on Control Systems Technology vol 12no 2 pp 235ndash249 2004
[15] A Bemporad W P M H Heemels and B De SchutterldquoOn hybrid systems and closed-loop MPC systemsrdquo IEEETransactions on Automatic Control vol 47 no 5 pp 863ndash8692002
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 7
2
15
1
05
0
minus05
minus1
minus15minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (Q
SmV
)C120572 y
(a) Relation between 119862120572119910and 120572
0092
009
0088
0086
0084
0082
008
0078
0076
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (Q
SmV
)C120575119911y
(b) Relation between 119862120575119911119910 and 120572
125
12
115
11
105
10
95
9minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (Q
SLJz)m
120572 z
(c) Relation between119898120572119911and 120572
96
94
92
90
88
86
84minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
Aero
dyna
mic
par
amet
er (minusQSL
Jz)m
120575119911z
(d) Relation between119898120575119911119911 and 120572
1
09
08
07
06
05
04
03
02
01
Am
plifi
catio
n fa
ctorKF
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
(e) Relation between119870119865119910
and 120572
12
11
1
09
08
07
06
05
04
03
Am
plifi
catio
n fa
ctorKM119911
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
Angle of attack (rad)
(f) Relation between119870119872119911
and 120572
Figure 5 Aerodynamic parameters as functions of angle of attack
8 International Journal of Aerospace Engineering
Table 2 Aerodynamic parameters of pitch channel
Aerodynamic parameter 119876119878119862120572
119910119898119881 119876119878119862
120575119911
119910119898119881 119876119878119871119898
120572
119911119869119911
119876119878119871119898119903
119911119869119911
119876119878119871119898120575119911
119911119869119911
120572 = minus053 minus1175 0076 947 minus032 minus8489
120572 = minus037 minus0944 0082 973 minus032 minus8924
120572 = minus0153 minus023 0082 1043 minus032 minus8938
120572 = 0 036 009 1101 minus032 minus9510
120572 = 0153 094 0082 1158 minus032 minus8934
120572 = 037 163 0082 1224 minus032 minus8918
3 = [minus003 268 times 10
minus6
minus2228 223 times 10minus4]
4 = [minus0032 277 times 10
minus6
minus2371 232 times 10minus4]
5 = [minus003 227 times 10
minus6
minus2228 198 times 10minus4]
6 = [minus0029 191 times 10
minus6
minus2224 173 times 10minus4]
(25)
32 Constraints Analysis Due to the symmetry of jet config-uration the set of possible negative pitch control force is givenby
119880119910minus
119865= minus119865119898 minus2119865119898 cos
120587
9 minus2119865119898 cos
120587
18 minus2119865119898 minus4119865119898 cos
120587
9
minus4119865119898 cos120587
18
(26)
By combining (13) and (26) we obtain the set of allpossible pitch control force
119880119910
119865= 119865119898 2119865119898 cos
120587
9 2119865119898 cos
120587
18 2119865119898 4119865119898 cos
120587
9
4119865119898 cos120587
18 minus119865119898 minus2119865119898 cos
120587
9 minus2119865119898 cos
120587
18 minus2119865119898
minus4119865119898 cos120587
9 minus4119865119898 cos
120587
18
(27)
Substituting the jet parameters shown in Table 1 into theforegoing set yields
119880119910
119865= 2200 4135 4333 4400 8269 8666 minus2200 minus4135
minus4333 minus4400 minus8269 minus8666
(28)
Noting that the lateral forces are discrete variable we willutilize the linear combination of logical variables to describethe lateral force In terms of piecewise affine model (20) we
introduce logical variables 120575119865119894
isin 0 1 119894 = 1 2 12 toexpress the lateral thrust 119865119910
119887
119865119910119887
= 22001205751198651
+ 41351205751198652
+ 43331205751198653
+ 44001205751198654
+ 82691205751198655
+ 86661205751198656
minus 22001205751198657
minus 41351205751198658
minus 43331205751198659
minus 440012057511986510
minus 826912057511986511
minus 866612057511986512
(29)
In (29) the logical variables should satisfy the constraints
12
sum
119894=1
120575119865119894
= 0 or 1 (30)
where 0 means that no lateral force is generated while 1
means that the applied lateral force equals to one element ofset 119880119910119865
Denote 1199061 = 120575119911 the control input 119906 in model (23) can berewritten as
119906 = [1199061 119865119910119887
]119879 (31)
As shown in Table 1 the constraints on system states andcontrol input are
119909min le 119909 (119896) le 119909max
1199061min le 1199061 (119896) le 1199061max(32)
where 119909min = [minus053 minus522]119879 119909max = [053 522]
119879 1199061min =
minus053 1199061max = 053According to (30) we have
12
sum
119894=1
120575119865119894
le 1 (33)
which shows the constraint on the logical control inputUse logical variables 120575119894(119896) isin 0 1 119894 = 1 2 5 to
describe the operation points which satisfy the constraints
[1 0] 119909 (119896) + 037 le 0 lArrrArr 1205751 (119896) = 1
[1 0] 119909 (119896) + 0153 le 0 lArrrArr 1205752 (119896) = 1
[1 0] 119909 (119896) le 0 lArrrArr 1205753 (119896) = 1
[1 0] 119909 (119896) minus 0153 le 0 lArrrArr 1205754 (119896) = 1
[1 0] 119909 (119896) minus 037 le 0 lArrrArr 1205755 (119896) = 1
(34)
International Journal of Aerospace Engineering 9
Equation (34) can be transformed into the followingequivalent mixed logical inequalities [13]
[1 0] 119909 (119896) + 037 ge 120576 + (1198981 minus 120576) 1205751 (119896)
[1 0] 119909 (119896) + 037 le 1198721 (1 minus 1205751 (119896))
[1 0] 119909 (119896) + 0153 ge 120576 + (1198982 minus 120576) 1205752 (119896)
[1 0] 119909 (119896) + 0153 le 1198722 (1 minus 1205752 (119896))
[1 0] 119909 (119896) ge 120576 + (1198983 minus 120576) 1205753 (119896)
[1 0] 119909 (119896) le 1198723 (1 minus 1205753 (119896))
[1 0] 119909 (119896) minus 0153 ge 120576 + (1198984 minus 120576) 1205754 (119896)
[1 0] 119909 (119896) minus 0153 le 1198724 (1 minus 1205754 (119896))
[1 0] 119909 (119896) minus 037 ge 120576 + (1198985 minus 120576) 1205755 (119896)
[1 0] 119909 (119896) minus 037 le 1198725 (1 minus 1205755 (119896))
(35)
where 1198981 = minus016 1198721 = 090 1198982 = minus0377 1198722 = 06831198983 = minus053 1198723 = 053 1198984 = minus0683 1198724 = 0377 1198985 =
minus0901198725 = 016 and 120576 = 10minus6
In addition we introduce the auxiliary logical variables120575119894(119896) isin 0 1 119894 = 6 9 as follows
1205756 (119896) = (1 minus 1205751 (119896)) 1205752 (119896)
1205757 (119896) = (1 minus 1205752 (119896)) 1205753 (119896)
1205758 (119896) = (1 minus 1205753 (119896)) 1205754 (119896)
1205759 (119896) = (1 minus 1205754 (119896)) 1205755 (119896)
(36)
With 1205751 1205756 1205757 1205758 1205759 and 1 minus 1205755 the six regions canbe presented Similarly (36) can be transformed into theequivalent mixed logical inequalities
minus1205751 (119896) + 1205752 (119896) minus 1205756 (119896) le 0
1205751 (119896) + 1205756 (119896) le 1
minus1205752 (119896) + 1205756 (119896) le 0
minus1205752 (119896) + 1205753 (119896) minus 1205757 (119896) le 0
1205752 (119896) + 1205757 (119896) le 1
minus1205753 (119896) + 1205757 (119896) le 0
minus1205753 (119896) + 1205754 (119896) minus 1205758 (119896) le 0
1205753 (119896) + 1205758 (119896) le 1
minus1205754 (119896) + 1205758 (119896) le 0
minus1205754 (119896) + 1205755 (119896) minus 1205759 (119896) le 0
1205754 (119896) + 1205759 (119896) le 1
minus1205755 (119896) + 1205759 (119896) le 0
(37)
To describe the state space model of each region weintroduce the following auxiliary continuous variables
1199111 (119896) = (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) 1205751 (119896)
1199112 (119896) = (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) 1205756 (119896)
1199113 (119896) = (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) 1205757 (119896)
1199114 (119896) = (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) 1205758 (119896)
1199115 (119896) = (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) 1205759 (119896)
1199116 (119896) = (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) (1 minus 1205755 (119896))
(38)
Equation (38) can be converted to the equivalent mixedlogical inequalities
1199111 (119896) ge (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) minus 1198721198911 (1 minus 1205751 (119896))
1199111 (119896) le (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) minus 1198981198911 (1 minus 1205751 (119896))
1199111 (119896) ge 11989811989111205751 (119896)
1199111 (119896) le 11987211989111205751 (119896)
1199112 (119896) ge (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) minus 1198721198912 (1 minus 1205756 (119896))
1199112 (119896) le (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) minus 1198981198912 (1 minus 1205756 (119896))
1199112 (119896) ge 11989811989121205756 (119896)
1199112 (119896) le 11987211989121205756 (119896)
1199113 (119896) ge (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) minus 1198721198913 (1 minus 1205757 (119896))
1199113 (119896) le (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) minus 1198981198913 (1 minus 1205757 (119896))
1199113 (119896) ge 11989811989131205757 (119896)
1199113 (119896) le 11987211989131205757 (119896)
1199114 (119896) ge (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) minus 1198721198914 (1 minus 1205758 (119896))
1199114 (119896) le (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) minus 1198981198914 (1 minus 1205758 (119896))
1199114 (119896) ge 11989811989141205758 (119896)
1199114 (119896) le 11987211989141205758 (119896)
1199115 (119896) ge (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) minus 1198721198915 (1 minus 1205759 (119896))
1199115 (119896) le (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) minus 1198981198915 (1 minus 1205759 (119896))
10 International Journal of Aerospace Engineering
1199115 (119896) ge 11989811989151205759 (119896)
1199115 (119896) le 11987211989151205759 (119896)
1199116 (119896) ge (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) minus 11987211989151205755 (119896)
1199116 (119896) le (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) minus 11989811989151205755 (119896)
1199116 (119896) ge 1198981198916 (1 minus 1205755 (119896))
1199116 (119896) le 1198721198916 (1 minus 1205755 (119896))
(39)
where1198721198911 = [073 1084]1198791198981198911 = [minus077 minus1106]
1198791198721198912 =[076 1166]
119879 1198981198912 = [minus079 minus 1256]119879 1198721198913 =
[077 1273]119879 1198981198913 = [minus078 minus 1280]
119879 1198721198914 =
[076 1403]119879 1198981198914 = [minus076 minus 1403]
119879 1198721198915 =
[0725 1291]119879 1198981198915 = [minus0736 minus 1205]
119879 1198721198916 =
[0696 1154]119879 and1198981198916 = [minus073 minus 1130]
119879Then the whole MLD model of the missile is given by
119909 (119896 + 1) =
6
sum
119894=1
119911119894 (119896)
119910 (119896) = [1 0] 119909 (119896)
st (28) (30) (32) (34) (36) (38)
(40)
where (29) (31) (33) (35) (37) and (39) represent all theconstraint inequalities
4 Autopilot Design UsingHybrid MPC Method
In general we expect that the output 119910 tracks its command 119910119888
as fast as possible with a small amount of fuel consumptionMotivated by this observation we consider the followingoptimization problem
119869lowast
= min119906(119896)119906(119896+1)120575(119896)120575(119896+1|119896)119911(119896)119911(119896+1|119896)
119873
sum
119894=1
(1003817100381710038171003817119910 (119896 + 119894 | 119896)
minus119910119888 (119896 + 119894)1003817100381710038171003817
2
119876
+ 119906(119896 + 119894)2
119877)
st MLD model (39)
1199061min le 1199061 (119896) 1199061 (119896 + 1) le 1199061max
119909min le 119909 (119896) 119909 (119896 + 1) le 119909max
(41)
where 119910119888 is the command for angle of attack 119910(119896 + 119894 | 119896) ispredictive value of angle of attack 119873 denotes the predictivehorizon 119876 and 119877 are the weighting matrices and 119877 =
diag(119877120575119911
119877119865119910
) 119877120575119911
119877119865119910
are weighted coefficients of aerody-namic control surfaces and lateral pulse jets respectivelyThe
ratio of 119877120575119911
and 119877119865119910
represents the control allocation betweenaerodynamic control surfaces and lateral pulse jets When119877119865119910
119877120575119911
is increased the requirement for lateral force will bedeclined that is the fuel consumption can be lessened Inaddition the deduction can be verified from the simulationresults of Case 1 and Case 2
Different control allocation between the dual actuators(aerodynamic control surfaces and lateral pulse jets) can beobtained by setting different 119876 and 119877 Since both logicaland continuous variables are involved in (41) the aboveon-line optimization problem is a mixed integer quadraticprogramming (MIQP) problemwhich can be solved by usingthe hybrid MPC toolbox of MATLAB [14 15]
Remark 2 In an explicit MPC controller the main factorsaffecting the number of subregions include the systemdimen-sion the predictive horizon and the number of constrains Inthis paper the blendedmissile with aerodynamic control sur-faces and lateral jets is investigated To deal with the discreteproperty of the lateral jet forces some logical variables areintroduced for MPC controller design which increases thenumber of subregions inevitably
5 Numerical Simulations
51 Case 1 Numerical simulations are performed to ver-ify the feasibility of the proposed method in this sectionThe involved parameters are given in Table 1 The weightmatrices are set as 119876 = 10 119877120575
119911
= 0025 and 119877119865119910
=
diag(0005 0005 0005) Suppose the initial state is 1205720 =0 1199030 = 0 In order to avoid excessive computational load wechoose predictive horizon119873 = 2 and control horizon119872 = 2The command for angle of attack is 120572119888 = 02 rad
Explicit form of the optimal controller is provided byhybrid toolbox which is not given here for simplicity Insteadwe present the partition results associated with the controllerin Figure 6 where 4190 subregions are obtained and for eachsubregion a control law of the form 119906 = 119870119909 + 119887 is givenAs a benefit of using explicit MPC the controller parameters119870 and 119887 for all the subregions are obtained simultaneouslyonce the optimization problem is solved This property isobviously different from that of gain-scheduled controller(where the controller parameters for different regions areseparately determined)
However by a simple calculation we conclude that thesesubregions donot require toomuch storage space (the neededstorage space is approximately 14 times 8 times 4190 = 450KB)Moreover it should be noted that when the algorithm isimplemented in practice much more time will be needed toidentify which subregion the current states enter into This isanother important factor that affects the computational costof the proposed algorithm
The simulation results are shown in Figures 7ndash9 It isseen from Figure 7 that the actual angle of attack tracksthe command in less than 01 seconds As shown in Figures8 and 9 the aerodynamic force converges to a constant astime increases while the jets are only activated during thebeginning period (when the tracking error is obvious)
International Journal of Aerospace Engineering 11
58
68
73
108
174
180
245
252
254
270
271
272
273
274
276
277
299
300
301
302
06
04
02
0
minus02
minus04
Elev
ator
defl
ectio
n (r
ad)
Angle of attack (rad)minus04 minus02 0 02 04 06
1634
1635
1638
1648
1649
1650
1664
1673
1677
1678
1679
1712
1726
1743
1744
1746
1748
1751
1752
1983
1985
1993
2011
Late
ral f
orce
(N)
Angle of attack (rad)minus04 minus02 0 02 04 06
1000
800
600
400
200
0
minus200
minus400
minus600
minus800
minus1000
Polyhedral partitionmdash4190 regions Polyhedral partitionmdash4190 regions
Figure 6 The partition associated with the explicit controller
025
02
015
01
005
0
ActualCommand
0 02 04 06 08 1
Time (s)
Ang
le o
f atta
ck (r
ad)
Figure 7 The response of angle of attack
52 Case 2 The results for the case with a different weight119877120575119911
= 0005 are shown in Figures 10ndash12 It is seen that adifferent control allocation result is obtained
04
02
0
minus02
minus04
minus060 02 04 06 08 1
Time (s)
Elev
ator
defl
ectio
n (r
ad)
Figure 8 The response of elevator deflection
53 Case 3 In this case a different command 120572119888 =
02 cos(05120587119905) rad is considered and the weight matrices arethe same as the ones for Case 1 The simulation results areshown in Figures 13ndash15
It is seen from Figure 13 that asymptotic tracking is alsoachievedThemethod proposed in this paper can realize both
12 International Journal of Aerospace Engineering
1
05
0
minus05
minus1
times104
0 02 04 06 08 1
Time (s)
Late
ral f
orce
(N)
Figure 9 The response of lateral force
025
02
015
01
005
0
Ang
le o
f atta
ck (r
ad)
0 02 04 06 08 1
Time (s)
ActualCommand
Figure 10 The response of angle of attack
06
04
02
0
minus02
minus04
minus06
minus08
Elev
ator
defl
ectio
n (r
ad)
0 02 04 06 08 1
Time (s)
Figure 11 The response of elevator deflection
1
05
0
minus05
minus1
Late
ral f
orce
(N)
times104
0 02 04 06 08 1
Time (s)
Figure 12 The response of lateral force
03
025
02
015
01
005
0
minus005
minus01
minus015
minus02
Ang
le o
f atta
ck (r
ad)
0 05 1 15 2 25 3 35 4
Time (s)
ActualCommand
Figure 13 The response of angle of attack
06
04
02
0
minus02
minus04
minus06
minus08
Elev
ator
defl
ectio
n (r
ad)
0 05 1 15 2 25 3 35 4
Time (s)
Figure 14 The response of elevator deflection
International Journal of Aerospace Engineering 13
1
08
06
04
02
0
minus02
minus04
minus06
minus08
minus1
Late
ral f
orce
(N)
0 05 1 15 2 25 3 35 4
Time (s)
times104
Figure 15 The response of lateral force
fast tracking command and control allocation It is seen fromFigure 15 that the jets are activated while the tracking erroris obvious or command is varying rapidly
6 Conclusion
An autopilot design method for a missile with aerodynamiccontrol surfaces and lateral jets is presented in this paperThe nonlinear attitude control model is reduced to an MLDmodel Meanwhile the lateral force is described as linearcombination of logical variables due to the discrete values oflateral force Then the whole MLD model of attitude controlsystem is derived Autopilot design is accomplished usinghybrid MPC method By setting the related weighted coeffi-cients in index function the control allocation is obtainedMoreover numerical simulations are performed under thedifferent conditions the performance of tracking the attitudecommand and control allocation is verified and the explicitform of the control law can be obtained as well
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research presented in this document is supportedby the National Natural Science Foundation of Chinaunder Grant nos 61104193 61203191 and 61333001 theFundamental Research Funds for the Central Universities(HITNSRIF2012032) the Program for IBRSEM in HarbinInstitute of Technology under Grant HITIBRSEMA201415and the Foundation of Supporting Technology for Aerospaceunder Grant 2014-HT-HGD7
References
[1] R Hirokawa K Sato and S Manabe ldquoAutopilot design fora missile with reaction-jet using coefficient diagram methodrdquoin Proceedings of the AIAA Guidance Navigation and ControlConference and Exhibit 2001 August 2001
[2] P K Menon and V R Iragavarapu Adaptive Techniques forMultiple Actuator Blending Defense Technical InformationCenter 1998
[3] A G Munson and M W Garbrick ldquoJet interaction investiga-tionrdquo Report OR-9933 Martin Marietta Orlando Fla USA1969
[4] M Graham and P Weinacht ldquoNumerical simulation of lateralcontrol jetsrdquo in Proceedings of the 37th Aerospace SciencesMeeting and Exhibit 1999 AIAA Paper
[5] J S Shamma and J R Cloutier ldquoGain-scheduledmissile autopi-lot design using linear parameter varying transformationsrdquoJournal of Guidance Control and Dynamics vol 16 no 2 pp256ndash263 1993
[6] M Innocenti and A Thukral ldquoSimultaneous reaction jet andaerodynamic control of missile systemsrdquo AlAA 93-3739-CP1993
[7] D B Ridgely Y Lee and T Fanciullo ldquoDual aeropropulsivemissile control-optimal control and control allocationrdquo inProceedings of the AIAA Guidance Navigation and ControlConference and Exhibit Keystone Colo USA 2006
[8] D B Ridgely D Drake L Triplett and C Geise ldquoDynamiccontrol allocation of a missile with tails and reaction jetsrdquo inProceedings of the AIAA Guidance Navigation and ControlConference pp 3158ndash3189 August 2007
[9] D Q Mayne J B Rawlings C V Rao and P O ScokaertldquoConstrained model predictive control stability and optimal-ityrdquo Automatica vol 36 no 6 pp 789ndash814 2000
[10] A Bemporad F Borrelli and M Morari ldquoModel predictivecontrol based on linear programmingmdashthe explicit solutionrdquoIEEE Transactions on Automatic Control vol 47 no 12 pp1974ndash1985 2002
[11] C Jouannet and P Krus ldquoModelling of high angle of attackaerodynamicrdquo in Proceedings of the 25th AIAA Applied Aerody-namics Conference pp 1481ndash1516 June 2007
[12] S Venugopal and M Krishnamurthy ldquoMissile aerodynamics athigh angles of attack a prediction coderdquo Journal of Spacecraftand Rockets vol 32 no 2 pp 263ndash269 1995
[13] A Bemporad ldquoEfficient conversion of mixed logical dynamicalsystems into an equivalent piecewise affine formrdquo IEEE Trans-actions on Automatic Control vol 49 no 5 pp 832ndash838 2004
[14] F D Torrisi andA Bemporad ldquoHYSDELmdasha tool for generatingcomputational hybrid models for analysis and synthesis prob-lemsrdquo IEEE Transactions on Control Systems Technology vol 12no 2 pp 235ndash249 2004
[15] A Bemporad W P M H Heemels and B De SchutterldquoOn hybrid systems and closed-loop MPC systemsrdquo IEEETransactions on Automatic Control vol 47 no 5 pp 863ndash8692002
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 International Journal of Aerospace Engineering
Table 2 Aerodynamic parameters of pitch channel
Aerodynamic parameter 119876119878119862120572
119910119898119881 119876119878119862
120575119911
119910119898119881 119876119878119871119898
120572
119911119869119911
119876119878119871119898119903
119911119869119911
119876119878119871119898120575119911
119911119869119911
120572 = minus053 minus1175 0076 947 minus032 minus8489
120572 = minus037 minus0944 0082 973 minus032 minus8924
120572 = minus0153 minus023 0082 1043 minus032 minus8938
120572 = 0 036 009 1101 minus032 minus9510
120572 = 0153 094 0082 1158 minus032 minus8934
120572 = 037 163 0082 1224 minus032 minus8918
3 = [minus003 268 times 10
minus6
minus2228 223 times 10minus4]
4 = [minus0032 277 times 10
minus6
minus2371 232 times 10minus4]
5 = [minus003 227 times 10
minus6
minus2228 198 times 10minus4]
6 = [minus0029 191 times 10
minus6
minus2224 173 times 10minus4]
(25)
32 Constraints Analysis Due to the symmetry of jet config-uration the set of possible negative pitch control force is givenby
119880119910minus
119865= minus119865119898 minus2119865119898 cos
120587
9 minus2119865119898 cos
120587
18 minus2119865119898 minus4119865119898 cos
120587
9
minus4119865119898 cos120587
18
(26)
By combining (13) and (26) we obtain the set of allpossible pitch control force
119880119910
119865= 119865119898 2119865119898 cos
120587
9 2119865119898 cos
120587
18 2119865119898 4119865119898 cos
120587
9
4119865119898 cos120587
18 minus119865119898 minus2119865119898 cos
120587
9 minus2119865119898 cos
120587
18 minus2119865119898
minus4119865119898 cos120587
9 minus4119865119898 cos
120587
18
(27)
Substituting the jet parameters shown in Table 1 into theforegoing set yields
119880119910
119865= 2200 4135 4333 4400 8269 8666 minus2200 minus4135
minus4333 minus4400 minus8269 minus8666
(28)
Noting that the lateral forces are discrete variable we willutilize the linear combination of logical variables to describethe lateral force In terms of piecewise affine model (20) we
introduce logical variables 120575119865119894
isin 0 1 119894 = 1 2 12 toexpress the lateral thrust 119865119910
119887
119865119910119887
= 22001205751198651
+ 41351205751198652
+ 43331205751198653
+ 44001205751198654
+ 82691205751198655
+ 86661205751198656
minus 22001205751198657
minus 41351205751198658
minus 43331205751198659
minus 440012057511986510
minus 826912057511986511
minus 866612057511986512
(29)
In (29) the logical variables should satisfy the constraints
12
sum
119894=1
120575119865119894
= 0 or 1 (30)
where 0 means that no lateral force is generated while 1
means that the applied lateral force equals to one element ofset 119880119910119865
Denote 1199061 = 120575119911 the control input 119906 in model (23) can berewritten as
119906 = [1199061 119865119910119887
]119879 (31)
As shown in Table 1 the constraints on system states andcontrol input are
119909min le 119909 (119896) le 119909max
1199061min le 1199061 (119896) le 1199061max(32)
where 119909min = [minus053 minus522]119879 119909max = [053 522]
119879 1199061min =
minus053 1199061max = 053According to (30) we have
12
sum
119894=1
120575119865119894
le 1 (33)
which shows the constraint on the logical control inputUse logical variables 120575119894(119896) isin 0 1 119894 = 1 2 5 to
describe the operation points which satisfy the constraints
[1 0] 119909 (119896) + 037 le 0 lArrrArr 1205751 (119896) = 1
[1 0] 119909 (119896) + 0153 le 0 lArrrArr 1205752 (119896) = 1
[1 0] 119909 (119896) le 0 lArrrArr 1205753 (119896) = 1
[1 0] 119909 (119896) minus 0153 le 0 lArrrArr 1205754 (119896) = 1
[1 0] 119909 (119896) minus 037 le 0 lArrrArr 1205755 (119896) = 1
(34)
International Journal of Aerospace Engineering 9
Equation (34) can be transformed into the followingequivalent mixed logical inequalities [13]
[1 0] 119909 (119896) + 037 ge 120576 + (1198981 minus 120576) 1205751 (119896)
[1 0] 119909 (119896) + 037 le 1198721 (1 minus 1205751 (119896))
[1 0] 119909 (119896) + 0153 ge 120576 + (1198982 minus 120576) 1205752 (119896)
[1 0] 119909 (119896) + 0153 le 1198722 (1 minus 1205752 (119896))
[1 0] 119909 (119896) ge 120576 + (1198983 minus 120576) 1205753 (119896)
[1 0] 119909 (119896) le 1198723 (1 minus 1205753 (119896))
[1 0] 119909 (119896) minus 0153 ge 120576 + (1198984 minus 120576) 1205754 (119896)
[1 0] 119909 (119896) minus 0153 le 1198724 (1 minus 1205754 (119896))
[1 0] 119909 (119896) minus 037 ge 120576 + (1198985 minus 120576) 1205755 (119896)
[1 0] 119909 (119896) minus 037 le 1198725 (1 minus 1205755 (119896))
(35)
where 1198981 = minus016 1198721 = 090 1198982 = minus0377 1198722 = 06831198983 = minus053 1198723 = 053 1198984 = minus0683 1198724 = 0377 1198985 =
minus0901198725 = 016 and 120576 = 10minus6
In addition we introduce the auxiliary logical variables120575119894(119896) isin 0 1 119894 = 6 9 as follows
1205756 (119896) = (1 minus 1205751 (119896)) 1205752 (119896)
1205757 (119896) = (1 minus 1205752 (119896)) 1205753 (119896)
1205758 (119896) = (1 minus 1205753 (119896)) 1205754 (119896)
1205759 (119896) = (1 minus 1205754 (119896)) 1205755 (119896)
(36)
With 1205751 1205756 1205757 1205758 1205759 and 1 minus 1205755 the six regions canbe presented Similarly (36) can be transformed into theequivalent mixed logical inequalities
minus1205751 (119896) + 1205752 (119896) minus 1205756 (119896) le 0
1205751 (119896) + 1205756 (119896) le 1
minus1205752 (119896) + 1205756 (119896) le 0
minus1205752 (119896) + 1205753 (119896) minus 1205757 (119896) le 0
1205752 (119896) + 1205757 (119896) le 1
minus1205753 (119896) + 1205757 (119896) le 0
minus1205753 (119896) + 1205754 (119896) minus 1205758 (119896) le 0
1205753 (119896) + 1205758 (119896) le 1
minus1205754 (119896) + 1205758 (119896) le 0
minus1205754 (119896) + 1205755 (119896) minus 1205759 (119896) le 0
1205754 (119896) + 1205759 (119896) le 1
minus1205755 (119896) + 1205759 (119896) le 0
(37)
To describe the state space model of each region weintroduce the following auxiliary continuous variables
1199111 (119896) = (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) 1205751 (119896)
1199112 (119896) = (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) 1205756 (119896)
1199113 (119896) = (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) 1205757 (119896)
1199114 (119896) = (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) 1205758 (119896)
1199115 (119896) = (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) 1205759 (119896)
1199116 (119896) = (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) (1 minus 1205755 (119896))
(38)
Equation (38) can be converted to the equivalent mixedlogical inequalities
1199111 (119896) ge (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) minus 1198721198911 (1 minus 1205751 (119896))
1199111 (119896) le (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) minus 1198981198911 (1 minus 1205751 (119896))
1199111 (119896) ge 11989811989111205751 (119896)
1199111 (119896) le 11987211989111205751 (119896)
1199112 (119896) ge (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) minus 1198721198912 (1 minus 1205756 (119896))
1199112 (119896) le (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) minus 1198981198912 (1 minus 1205756 (119896))
1199112 (119896) ge 11989811989121205756 (119896)
1199112 (119896) le 11987211989121205756 (119896)
1199113 (119896) ge (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) minus 1198721198913 (1 minus 1205757 (119896))
1199113 (119896) le (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) minus 1198981198913 (1 minus 1205757 (119896))
1199113 (119896) ge 11989811989131205757 (119896)
1199113 (119896) le 11987211989131205757 (119896)
1199114 (119896) ge (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) minus 1198721198914 (1 minus 1205758 (119896))
1199114 (119896) le (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) minus 1198981198914 (1 minus 1205758 (119896))
1199114 (119896) ge 11989811989141205758 (119896)
1199114 (119896) le 11987211989141205758 (119896)
1199115 (119896) ge (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) minus 1198721198915 (1 minus 1205759 (119896))
1199115 (119896) le (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) minus 1198981198915 (1 minus 1205759 (119896))
10 International Journal of Aerospace Engineering
1199115 (119896) ge 11989811989151205759 (119896)
1199115 (119896) le 11987211989151205759 (119896)
1199116 (119896) ge (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) minus 11987211989151205755 (119896)
1199116 (119896) le (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) minus 11989811989151205755 (119896)
1199116 (119896) ge 1198981198916 (1 minus 1205755 (119896))
1199116 (119896) le 1198721198916 (1 minus 1205755 (119896))
(39)
where1198721198911 = [073 1084]1198791198981198911 = [minus077 minus1106]
1198791198721198912 =[076 1166]
119879 1198981198912 = [minus079 minus 1256]119879 1198721198913 =
[077 1273]119879 1198981198913 = [minus078 minus 1280]
119879 1198721198914 =
[076 1403]119879 1198981198914 = [minus076 minus 1403]
119879 1198721198915 =
[0725 1291]119879 1198981198915 = [minus0736 minus 1205]
119879 1198721198916 =
[0696 1154]119879 and1198981198916 = [minus073 minus 1130]
119879Then the whole MLD model of the missile is given by
119909 (119896 + 1) =
6
sum
119894=1
119911119894 (119896)
119910 (119896) = [1 0] 119909 (119896)
st (28) (30) (32) (34) (36) (38)
(40)
where (29) (31) (33) (35) (37) and (39) represent all theconstraint inequalities
4 Autopilot Design UsingHybrid MPC Method
In general we expect that the output 119910 tracks its command 119910119888
as fast as possible with a small amount of fuel consumptionMotivated by this observation we consider the followingoptimization problem
119869lowast
= min119906(119896)119906(119896+1)120575(119896)120575(119896+1|119896)119911(119896)119911(119896+1|119896)
119873
sum
119894=1
(1003817100381710038171003817119910 (119896 + 119894 | 119896)
minus119910119888 (119896 + 119894)1003817100381710038171003817
2
119876
+ 119906(119896 + 119894)2
119877)
st MLD model (39)
1199061min le 1199061 (119896) 1199061 (119896 + 1) le 1199061max
119909min le 119909 (119896) 119909 (119896 + 1) le 119909max
(41)
where 119910119888 is the command for angle of attack 119910(119896 + 119894 | 119896) ispredictive value of angle of attack 119873 denotes the predictivehorizon 119876 and 119877 are the weighting matrices and 119877 =
diag(119877120575119911
119877119865119910
) 119877120575119911
119877119865119910
are weighted coefficients of aerody-namic control surfaces and lateral pulse jets respectivelyThe
ratio of 119877120575119911
and 119877119865119910
represents the control allocation betweenaerodynamic control surfaces and lateral pulse jets When119877119865119910
119877120575119911
is increased the requirement for lateral force will bedeclined that is the fuel consumption can be lessened Inaddition the deduction can be verified from the simulationresults of Case 1 and Case 2
Different control allocation between the dual actuators(aerodynamic control surfaces and lateral pulse jets) can beobtained by setting different 119876 and 119877 Since both logicaland continuous variables are involved in (41) the aboveon-line optimization problem is a mixed integer quadraticprogramming (MIQP) problemwhich can be solved by usingthe hybrid MPC toolbox of MATLAB [14 15]
Remark 2 In an explicit MPC controller the main factorsaffecting the number of subregions include the systemdimen-sion the predictive horizon and the number of constrains Inthis paper the blendedmissile with aerodynamic control sur-faces and lateral jets is investigated To deal with the discreteproperty of the lateral jet forces some logical variables areintroduced for MPC controller design which increases thenumber of subregions inevitably
5 Numerical Simulations
51 Case 1 Numerical simulations are performed to ver-ify the feasibility of the proposed method in this sectionThe involved parameters are given in Table 1 The weightmatrices are set as 119876 = 10 119877120575
119911
= 0025 and 119877119865119910
=
diag(0005 0005 0005) Suppose the initial state is 1205720 =0 1199030 = 0 In order to avoid excessive computational load wechoose predictive horizon119873 = 2 and control horizon119872 = 2The command for angle of attack is 120572119888 = 02 rad
Explicit form of the optimal controller is provided byhybrid toolbox which is not given here for simplicity Insteadwe present the partition results associated with the controllerin Figure 6 where 4190 subregions are obtained and for eachsubregion a control law of the form 119906 = 119870119909 + 119887 is givenAs a benefit of using explicit MPC the controller parameters119870 and 119887 for all the subregions are obtained simultaneouslyonce the optimization problem is solved This property isobviously different from that of gain-scheduled controller(where the controller parameters for different regions areseparately determined)
However by a simple calculation we conclude that thesesubregions donot require toomuch storage space (the neededstorage space is approximately 14 times 8 times 4190 = 450KB)Moreover it should be noted that when the algorithm isimplemented in practice much more time will be needed toidentify which subregion the current states enter into This isanother important factor that affects the computational costof the proposed algorithm
The simulation results are shown in Figures 7ndash9 It isseen from Figure 7 that the actual angle of attack tracksthe command in less than 01 seconds As shown in Figures8 and 9 the aerodynamic force converges to a constant astime increases while the jets are only activated during thebeginning period (when the tracking error is obvious)
International Journal of Aerospace Engineering 11
58
68
73
108
174
180
245
252
254
270
271
272
273
274
276
277
299
300
301
302
06
04
02
0
minus02
minus04
Elev
ator
defl
ectio
n (r
ad)
Angle of attack (rad)minus04 minus02 0 02 04 06
1634
1635
1638
1648
1649
1650
1664
1673
1677
1678
1679
1712
1726
1743
1744
1746
1748
1751
1752
1983
1985
1993
2011
Late
ral f
orce
(N)
Angle of attack (rad)minus04 minus02 0 02 04 06
1000
800
600
400
200
0
minus200
minus400
minus600
minus800
minus1000
Polyhedral partitionmdash4190 regions Polyhedral partitionmdash4190 regions
Figure 6 The partition associated with the explicit controller
025
02
015
01
005
0
ActualCommand
0 02 04 06 08 1
Time (s)
Ang
le o
f atta
ck (r
ad)
Figure 7 The response of angle of attack
52 Case 2 The results for the case with a different weight119877120575119911
= 0005 are shown in Figures 10ndash12 It is seen that adifferent control allocation result is obtained
04
02
0
minus02
minus04
minus060 02 04 06 08 1
Time (s)
Elev
ator
defl
ectio
n (r
ad)
Figure 8 The response of elevator deflection
53 Case 3 In this case a different command 120572119888 =
02 cos(05120587119905) rad is considered and the weight matrices arethe same as the ones for Case 1 The simulation results areshown in Figures 13ndash15
It is seen from Figure 13 that asymptotic tracking is alsoachievedThemethod proposed in this paper can realize both
12 International Journal of Aerospace Engineering
1
05
0
minus05
minus1
times104
0 02 04 06 08 1
Time (s)
Late
ral f
orce
(N)
Figure 9 The response of lateral force
025
02
015
01
005
0
Ang
le o
f atta
ck (r
ad)
0 02 04 06 08 1
Time (s)
ActualCommand
Figure 10 The response of angle of attack
06
04
02
0
minus02
minus04
minus06
minus08
Elev
ator
defl
ectio
n (r
ad)
0 02 04 06 08 1
Time (s)
Figure 11 The response of elevator deflection
1
05
0
minus05
minus1
Late
ral f
orce
(N)
times104
0 02 04 06 08 1
Time (s)
Figure 12 The response of lateral force
03
025
02
015
01
005
0
minus005
minus01
minus015
minus02
Ang
le o
f atta
ck (r
ad)
0 05 1 15 2 25 3 35 4
Time (s)
ActualCommand
Figure 13 The response of angle of attack
06
04
02
0
minus02
minus04
minus06
minus08
Elev
ator
defl
ectio
n (r
ad)
0 05 1 15 2 25 3 35 4
Time (s)
Figure 14 The response of elevator deflection
International Journal of Aerospace Engineering 13
1
08
06
04
02
0
minus02
minus04
minus06
minus08
minus1
Late
ral f
orce
(N)
0 05 1 15 2 25 3 35 4
Time (s)
times104
Figure 15 The response of lateral force
fast tracking command and control allocation It is seen fromFigure 15 that the jets are activated while the tracking erroris obvious or command is varying rapidly
6 Conclusion
An autopilot design method for a missile with aerodynamiccontrol surfaces and lateral jets is presented in this paperThe nonlinear attitude control model is reduced to an MLDmodel Meanwhile the lateral force is described as linearcombination of logical variables due to the discrete values oflateral force Then the whole MLD model of attitude controlsystem is derived Autopilot design is accomplished usinghybrid MPC method By setting the related weighted coeffi-cients in index function the control allocation is obtainedMoreover numerical simulations are performed under thedifferent conditions the performance of tracking the attitudecommand and control allocation is verified and the explicitform of the control law can be obtained as well
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research presented in this document is supportedby the National Natural Science Foundation of Chinaunder Grant nos 61104193 61203191 and 61333001 theFundamental Research Funds for the Central Universities(HITNSRIF2012032) the Program for IBRSEM in HarbinInstitute of Technology under Grant HITIBRSEMA201415and the Foundation of Supporting Technology for Aerospaceunder Grant 2014-HT-HGD7
References
[1] R Hirokawa K Sato and S Manabe ldquoAutopilot design fora missile with reaction-jet using coefficient diagram methodrdquoin Proceedings of the AIAA Guidance Navigation and ControlConference and Exhibit 2001 August 2001
[2] P K Menon and V R Iragavarapu Adaptive Techniques forMultiple Actuator Blending Defense Technical InformationCenter 1998
[3] A G Munson and M W Garbrick ldquoJet interaction investiga-tionrdquo Report OR-9933 Martin Marietta Orlando Fla USA1969
[4] M Graham and P Weinacht ldquoNumerical simulation of lateralcontrol jetsrdquo in Proceedings of the 37th Aerospace SciencesMeeting and Exhibit 1999 AIAA Paper
[5] J S Shamma and J R Cloutier ldquoGain-scheduledmissile autopi-lot design using linear parameter varying transformationsrdquoJournal of Guidance Control and Dynamics vol 16 no 2 pp256ndash263 1993
[6] M Innocenti and A Thukral ldquoSimultaneous reaction jet andaerodynamic control of missile systemsrdquo AlAA 93-3739-CP1993
[7] D B Ridgely Y Lee and T Fanciullo ldquoDual aeropropulsivemissile control-optimal control and control allocationrdquo inProceedings of the AIAA Guidance Navigation and ControlConference and Exhibit Keystone Colo USA 2006
[8] D B Ridgely D Drake L Triplett and C Geise ldquoDynamiccontrol allocation of a missile with tails and reaction jetsrdquo inProceedings of the AIAA Guidance Navigation and ControlConference pp 3158ndash3189 August 2007
[9] D Q Mayne J B Rawlings C V Rao and P O ScokaertldquoConstrained model predictive control stability and optimal-ityrdquo Automatica vol 36 no 6 pp 789ndash814 2000
[10] A Bemporad F Borrelli and M Morari ldquoModel predictivecontrol based on linear programmingmdashthe explicit solutionrdquoIEEE Transactions on Automatic Control vol 47 no 12 pp1974ndash1985 2002
[11] C Jouannet and P Krus ldquoModelling of high angle of attackaerodynamicrdquo in Proceedings of the 25th AIAA Applied Aerody-namics Conference pp 1481ndash1516 June 2007
[12] S Venugopal and M Krishnamurthy ldquoMissile aerodynamics athigh angles of attack a prediction coderdquo Journal of Spacecraftand Rockets vol 32 no 2 pp 263ndash269 1995
[13] A Bemporad ldquoEfficient conversion of mixed logical dynamicalsystems into an equivalent piecewise affine formrdquo IEEE Trans-actions on Automatic Control vol 49 no 5 pp 832ndash838 2004
[14] F D Torrisi andA Bemporad ldquoHYSDELmdasha tool for generatingcomputational hybrid models for analysis and synthesis prob-lemsrdquo IEEE Transactions on Control Systems Technology vol 12no 2 pp 235ndash249 2004
[15] A Bemporad W P M H Heemels and B De SchutterldquoOn hybrid systems and closed-loop MPC systemsrdquo IEEETransactions on Automatic Control vol 47 no 5 pp 863ndash8692002
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 9
Equation (34) can be transformed into the followingequivalent mixed logical inequalities [13]
[1 0] 119909 (119896) + 037 ge 120576 + (1198981 minus 120576) 1205751 (119896)
[1 0] 119909 (119896) + 037 le 1198721 (1 minus 1205751 (119896))
[1 0] 119909 (119896) + 0153 ge 120576 + (1198982 minus 120576) 1205752 (119896)
[1 0] 119909 (119896) + 0153 le 1198722 (1 minus 1205752 (119896))
[1 0] 119909 (119896) ge 120576 + (1198983 minus 120576) 1205753 (119896)
[1 0] 119909 (119896) le 1198723 (1 minus 1205753 (119896))
[1 0] 119909 (119896) minus 0153 ge 120576 + (1198984 minus 120576) 1205754 (119896)
[1 0] 119909 (119896) minus 0153 le 1198724 (1 minus 1205754 (119896))
[1 0] 119909 (119896) minus 037 ge 120576 + (1198985 minus 120576) 1205755 (119896)
[1 0] 119909 (119896) minus 037 le 1198725 (1 minus 1205755 (119896))
(35)
where 1198981 = minus016 1198721 = 090 1198982 = minus0377 1198722 = 06831198983 = minus053 1198723 = 053 1198984 = minus0683 1198724 = 0377 1198985 =
minus0901198725 = 016 and 120576 = 10minus6
In addition we introduce the auxiliary logical variables120575119894(119896) isin 0 1 119894 = 6 9 as follows
1205756 (119896) = (1 minus 1205751 (119896)) 1205752 (119896)
1205757 (119896) = (1 minus 1205752 (119896)) 1205753 (119896)
1205758 (119896) = (1 minus 1205753 (119896)) 1205754 (119896)
1205759 (119896) = (1 minus 1205754 (119896)) 1205755 (119896)
(36)
With 1205751 1205756 1205757 1205758 1205759 and 1 minus 1205755 the six regions canbe presented Similarly (36) can be transformed into theequivalent mixed logical inequalities
minus1205751 (119896) + 1205752 (119896) minus 1205756 (119896) le 0
1205751 (119896) + 1205756 (119896) le 1
minus1205752 (119896) + 1205756 (119896) le 0
minus1205752 (119896) + 1205753 (119896) minus 1205757 (119896) le 0
1205752 (119896) + 1205757 (119896) le 1
minus1205753 (119896) + 1205757 (119896) le 0
minus1205753 (119896) + 1205754 (119896) minus 1205758 (119896) le 0
1205753 (119896) + 1205758 (119896) le 1
minus1205754 (119896) + 1205758 (119896) le 0
minus1205754 (119896) + 1205755 (119896) minus 1205759 (119896) le 0
1205754 (119896) + 1205759 (119896) le 1
minus1205755 (119896) + 1205759 (119896) le 0
(37)
To describe the state space model of each region weintroduce the following auxiliary continuous variables
1199111 (119896) = (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) 1205751 (119896)
1199112 (119896) = (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) 1205756 (119896)
1199113 (119896) = (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) 1205757 (119896)
1199114 (119896) = (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) 1205758 (119896)
1199115 (119896) = (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) 1205759 (119896)
1199116 (119896) = (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) (1 minus 1205755 (119896))
(38)
Equation (38) can be converted to the equivalent mixedlogical inequalities
1199111 (119896) ge (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) minus 1198721198911 (1 minus 1205751 (119896))
1199111 (119896) le (1198861 (119896) 119909 (119896) + 1 (119896) 119906 (119896) + 1198901) minus 1198981198911 (1 minus 1205751 (119896))
1199111 (119896) ge 11989811989111205751 (119896)
1199111 (119896) le 11987211989111205751 (119896)
1199112 (119896) ge (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) minus 1198721198912 (1 minus 1205756 (119896))
1199112 (119896) le (1198862 (119896) 119909 (119896) + 2 (119896) 119906 (119896) + 1198902) minus 1198981198912 (1 minus 1205756 (119896))
1199112 (119896) ge 11989811989121205756 (119896)
1199112 (119896) le 11987211989121205756 (119896)
1199113 (119896) ge (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) minus 1198721198913 (1 minus 1205757 (119896))
1199113 (119896) le (1198863 (119896) 119909 (119896) + 3 (119896) 119906 (119896) + 1198903) minus 1198981198913 (1 minus 1205757 (119896))
1199113 (119896) ge 11989811989131205757 (119896)
1199113 (119896) le 11987211989131205757 (119896)
1199114 (119896) ge (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) minus 1198721198914 (1 minus 1205758 (119896))
1199114 (119896) le (1198864 (119896) 119909 (119896) + 4 (119896) 119906 (119896) + 1198904) minus 1198981198914 (1 minus 1205758 (119896))
1199114 (119896) ge 11989811989141205758 (119896)
1199114 (119896) le 11987211989141205758 (119896)
1199115 (119896) ge (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) minus 1198721198915 (1 minus 1205759 (119896))
1199115 (119896) le (1198865 (119896) 119909 (119896) + 5 (119896) 119906 (119896) + 1198905) minus 1198981198915 (1 minus 1205759 (119896))
10 International Journal of Aerospace Engineering
1199115 (119896) ge 11989811989151205759 (119896)
1199115 (119896) le 11987211989151205759 (119896)
1199116 (119896) ge (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) minus 11987211989151205755 (119896)
1199116 (119896) le (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) minus 11989811989151205755 (119896)
1199116 (119896) ge 1198981198916 (1 minus 1205755 (119896))
1199116 (119896) le 1198721198916 (1 minus 1205755 (119896))
(39)
where1198721198911 = [073 1084]1198791198981198911 = [minus077 minus1106]
1198791198721198912 =[076 1166]
119879 1198981198912 = [minus079 minus 1256]119879 1198721198913 =
[077 1273]119879 1198981198913 = [minus078 minus 1280]
119879 1198721198914 =
[076 1403]119879 1198981198914 = [minus076 minus 1403]
119879 1198721198915 =
[0725 1291]119879 1198981198915 = [minus0736 minus 1205]
119879 1198721198916 =
[0696 1154]119879 and1198981198916 = [minus073 minus 1130]
119879Then the whole MLD model of the missile is given by
119909 (119896 + 1) =
6
sum
119894=1
119911119894 (119896)
119910 (119896) = [1 0] 119909 (119896)
st (28) (30) (32) (34) (36) (38)
(40)
where (29) (31) (33) (35) (37) and (39) represent all theconstraint inequalities
4 Autopilot Design UsingHybrid MPC Method
In general we expect that the output 119910 tracks its command 119910119888
as fast as possible with a small amount of fuel consumptionMotivated by this observation we consider the followingoptimization problem
119869lowast
= min119906(119896)119906(119896+1)120575(119896)120575(119896+1|119896)119911(119896)119911(119896+1|119896)
119873
sum
119894=1
(1003817100381710038171003817119910 (119896 + 119894 | 119896)
minus119910119888 (119896 + 119894)1003817100381710038171003817
2
119876
+ 119906(119896 + 119894)2
119877)
st MLD model (39)
1199061min le 1199061 (119896) 1199061 (119896 + 1) le 1199061max
119909min le 119909 (119896) 119909 (119896 + 1) le 119909max
(41)
where 119910119888 is the command for angle of attack 119910(119896 + 119894 | 119896) ispredictive value of angle of attack 119873 denotes the predictivehorizon 119876 and 119877 are the weighting matrices and 119877 =
diag(119877120575119911
119877119865119910
) 119877120575119911
119877119865119910
are weighted coefficients of aerody-namic control surfaces and lateral pulse jets respectivelyThe
ratio of 119877120575119911
and 119877119865119910
represents the control allocation betweenaerodynamic control surfaces and lateral pulse jets When119877119865119910
119877120575119911
is increased the requirement for lateral force will bedeclined that is the fuel consumption can be lessened Inaddition the deduction can be verified from the simulationresults of Case 1 and Case 2
Different control allocation between the dual actuators(aerodynamic control surfaces and lateral pulse jets) can beobtained by setting different 119876 and 119877 Since both logicaland continuous variables are involved in (41) the aboveon-line optimization problem is a mixed integer quadraticprogramming (MIQP) problemwhich can be solved by usingthe hybrid MPC toolbox of MATLAB [14 15]
Remark 2 In an explicit MPC controller the main factorsaffecting the number of subregions include the systemdimen-sion the predictive horizon and the number of constrains Inthis paper the blendedmissile with aerodynamic control sur-faces and lateral jets is investigated To deal with the discreteproperty of the lateral jet forces some logical variables areintroduced for MPC controller design which increases thenumber of subregions inevitably
5 Numerical Simulations
51 Case 1 Numerical simulations are performed to ver-ify the feasibility of the proposed method in this sectionThe involved parameters are given in Table 1 The weightmatrices are set as 119876 = 10 119877120575
119911
= 0025 and 119877119865119910
=
diag(0005 0005 0005) Suppose the initial state is 1205720 =0 1199030 = 0 In order to avoid excessive computational load wechoose predictive horizon119873 = 2 and control horizon119872 = 2The command for angle of attack is 120572119888 = 02 rad
Explicit form of the optimal controller is provided byhybrid toolbox which is not given here for simplicity Insteadwe present the partition results associated with the controllerin Figure 6 where 4190 subregions are obtained and for eachsubregion a control law of the form 119906 = 119870119909 + 119887 is givenAs a benefit of using explicit MPC the controller parameters119870 and 119887 for all the subregions are obtained simultaneouslyonce the optimization problem is solved This property isobviously different from that of gain-scheduled controller(where the controller parameters for different regions areseparately determined)
However by a simple calculation we conclude that thesesubregions donot require toomuch storage space (the neededstorage space is approximately 14 times 8 times 4190 = 450KB)Moreover it should be noted that when the algorithm isimplemented in practice much more time will be needed toidentify which subregion the current states enter into This isanother important factor that affects the computational costof the proposed algorithm
The simulation results are shown in Figures 7ndash9 It isseen from Figure 7 that the actual angle of attack tracksthe command in less than 01 seconds As shown in Figures8 and 9 the aerodynamic force converges to a constant astime increases while the jets are only activated during thebeginning period (when the tracking error is obvious)
International Journal of Aerospace Engineering 11
58
68
73
108
174
180
245
252
254
270
271
272
273
274
276
277
299
300
301
302
06
04
02
0
minus02
minus04
Elev
ator
defl
ectio
n (r
ad)
Angle of attack (rad)minus04 minus02 0 02 04 06
1634
1635
1638
1648
1649
1650
1664
1673
1677
1678
1679
1712
1726
1743
1744
1746
1748
1751
1752
1983
1985
1993
2011
Late
ral f
orce
(N)
Angle of attack (rad)minus04 minus02 0 02 04 06
1000
800
600
400
200
0
minus200
minus400
minus600
minus800
minus1000
Polyhedral partitionmdash4190 regions Polyhedral partitionmdash4190 regions
Figure 6 The partition associated with the explicit controller
025
02
015
01
005
0
ActualCommand
0 02 04 06 08 1
Time (s)
Ang
le o
f atta
ck (r
ad)
Figure 7 The response of angle of attack
52 Case 2 The results for the case with a different weight119877120575119911
= 0005 are shown in Figures 10ndash12 It is seen that adifferent control allocation result is obtained
04
02
0
minus02
minus04
minus060 02 04 06 08 1
Time (s)
Elev
ator
defl
ectio
n (r
ad)
Figure 8 The response of elevator deflection
53 Case 3 In this case a different command 120572119888 =
02 cos(05120587119905) rad is considered and the weight matrices arethe same as the ones for Case 1 The simulation results areshown in Figures 13ndash15
It is seen from Figure 13 that asymptotic tracking is alsoachievedThemethod proposed in this paper can realize both
12 International Journal of Aerospace Engineering
1
05
0
minus05
minus1
times104
0 02 04 06 08 1
Time (s)
Late
ral f
orce
(N)
Figure 9 The response of lateral force
025
02
015
01
005
0
Ang
le o
f atta
ck (r
ad)
0 02 04 06 08 1
Time (s)
ActualCommand
Figure 10 The response of angle of attack
06
04
02
0
minus02
minus04
minus06
minus08
Elev
ator
defl
ectio
n (r
ad)
0 02 04 06 08 1
Time (s)
Figure 11 The response of elevator deflection
1
05
0
minus05
minus1
Late
ral f
orce
(N)
times104
0 02 04 06 08 1
Time (s)
Figure 12 The response of lateral force
03
025
02
015
01
005
0
minus005
minus01
minus015
minus02
Ang
le o
f atta
ck (r
ad)
0 05 1 15 2 25 3 35 4
Time (s)
ActualCommand
Figure 13 The response of angle of attack
06
04
02
0
minus02
minus04
minus06
minus08
Elev
ator
defl
ectio
n (r
ad)
0 05 1 15 2 25 3 35 4
Time (s)
Figure 14 The response of elevator deflection
International Journal of Aerospace Engineering 13
1
08
06
04
02
0
minus02
minus04
minus06
minus08
minus1
Late
ral f
orce
(N)
0 05 1 15 2 25 3 35 4
Time (s)
times104
Figure 15 The response of lateral force
fast tracking command and control allocation It is seen fromFigure 15 that the jets are activated while the tracking erroris obvious or command is varying rapidly
6 Conclusion
An autopilot design method for a missile with aerodynamiccontrol surfaces and lateral jets is presented in this paperThe nonlinear attitude control model is reduced to an MLDmodel Meanwhile the lateral force is described as linearcombination of logical variables due to the discrete values oflateral force Then the whole MLD model of attitude controlsystem is derived Autopilot design is accomplished usinghybrid MPC method By setting the related weighted coeffi-cients in index function the control allocation is obtainedMoreover numerical simulations are performed under thedifferent conditions the performance of tracking the attitudecommand and control allocation is verified and the explicitform of the control law can be obtained as well
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research presented in this document is supportedby the National Natural Science Foundation of Chinaunder Grant nos 61104193 61203191 and 61333001 theFundamental Research Funds for the Central Universities(HITNSRIF2012032) the Program for IBRSEM in HarbinInstitute of Technology under Grant HITIBRSEMA201415and the Foundation of Supporting Technology for Aerospaceunder Grant 2014-HT-HGD7
References
[1] R Hirokawa K Sato and S Manabe ldquoAutopilot design fora missile with reaction-jet using coefficient diagram methodrdquoin Proceedings of the AIAA Guidance Navigation and ControlConference and Exhibit 2001 August 2001
[2] P K Menon and V R Iragavarapu Adaptive Techniques forMultiple Actuator Blending Defense Technical InformationCenter 1998
[3] A G Munson and M W Garbrick ldquoJet interaction investiga-tionrdquo Report OR-9933 Martin Marietta Orlando Fla USA1969
[4] M Graham and P Weinacht ldquoNumerical simulation of lateralcontrol jetsrdquo in Proceedings of the 37th Aerospace SciencesMeeting and Exhibit 1999 AIAA Paper
[5] J S Shamma and J R Cloutier ldquoGain-scheduledmissile autopi-lot design using linear parameter varying transformationsrdquoJournal of Guidance Control and Dynamics vol 16 no 2 pp256ndash263 1993
[6] M Innocenti and A Thukral ldquoSimultaneous reaction jet andaerodynamic control of missile systemsrdquo AlAA 93-3739-CP1993
[7] D B Ridgely Y Lee and T Fanciullo ldquoDual aeropropulsivemissile control-optimal control and control allocationrdquo inProceedings of the AIAA Guidance Navigation and ControlConference and Exhibit Keystone Colo USA 2006
[8] D B Ridgely D Drake L Triplett and C Geise ldquoDynamiccontrol allocation of a missile with tails and reaction jetsrdquo inProceedings of the AIAA Guidance Navigation and ControlConference pp 3158ndash3189 August 2007
[9] D Q Mayne J B Rawlings C V Rao and P O ScokaertldquoConstrained model predictive control stability and optimal-ityrdquo Automatica vol 36 no 6 pp 789ndash814 2000
[10] A Bemporad F Borrelli and M Morari ldquoModel predictivecontrol based on linear programmingmdashthe explicit solutionrdquoIEEE Transactions on Automatic Control vol 47 no 12 pp1974ndash1985 2002
[11] C Jouannet and P Krus ldquoModelling of high angle of attackaerodynamicrdquo in Proceedings of the 25th AIAA Applied Aerody-namics Conference pp 1481ndash1516 June 2007
[12] S Venugopal and M Krishnamurthy ldquoMissile aerodynamics athigh angles of attack a prediction coderdquo Journal of Spacecraftand Rockets vol 32 no 2 pp 263ndash269 1995
[13] A Bemporad ldquoEfficient conversion of mixed logical dynamicalsystems into an equivalent piecewise affine formrdquo IEEE Trans-actions on Automatic Control vol 49 no 5 pp 832ndash838 2004
[14] F D Torrisi andA Bemporad ldquoHYSDELmdasha tool for generatingcomputational hybrid models for analysis and synthesis prob-lemsrdquo IEEE Transactions on Control Systems Technology vol 12no 2 pp 235ndash249 2004
[15] A Bemporad W P M H Heemels and B De SchutterldquoOn hybrid systems and closed-loop MPC systemsrdquo IEEETransactions on Automatic Control vol 47 no 5 pp 863ndash8692002
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

10 International Journal of Aerospace Engineering
1199115 (119896) ge 11989811989151205759 (119896)
1199115 (119896) le 11987211989151205759 (119896)
1199116 (119896) ge (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) minus 11987211989151205755 (119896)
1199116 (119896) le (1198866 (119896) 119909 (119896) + 6 (119896) 119906 (119896) + 1198906) minus 11989811989151205755 (119896)
1199116 (119896) ge 1198981198916 (1 minus 1205755 (119896))
1199116 (119896) le 1198721198916 (1 minus 1205755 (119896))
(39)
where1198721198911 = [073 1084]1198791198981198911 = [minus077 minus1106]
1198791198721198912 =[076 1166]
119879 1198981198912 = [minus079 minus 1256]119879 1198721198913 =
[077 1273]119879 1198981198913 = [minus078 minus 1280]
119879 1198721198914 =
[076 1403]119879 1198981198914 = [minus076 minus 1403]
119879 1198721198915 =
[0725 1291]119879 1198981198915 = [minus0736 minus 1205]
119879 1198721198916 =
[0696 1154]119879 and1198981198916 = [minus073 minus 1130]
119879Then the whole MLD model of the missile is given by
119909 (119896 + 1) =
6
sum
119894=1
119911119894 (119896)
119910 (119896) = [1 0] 119909 (119896)
st (28) (30) (32) (34) (36) (38)
(40)
where (29) (31) (33) (35) (37) and (39) represent all theconstraint inequalities
4 Autopilot Design UsingHybrid MPC Method
In general we expect that the output 119910 tracks its command 119910119888
as fast as possible with a small amount of fuel consumptionMotivated by this observation we consider the followingoptimization problem
119869lowast
= min119906(119896)119906(119896+1)120575(119896)120575(119896+1|119896)119911(119896)119911(119896+1|119896)
119873
sum
119894=1
(1003817100381710038171003817119910 (119896 + 119894 | 119896)
minus119910119888 (119896 + 119894)1003817100381710038171003817
2
119876
+ 119906(119896 + 119894)2
119877)
st MLD model (39)
1199061min le 1199061 (119896) 1199061 (119896 + 1) le 1199061max
119909min le 119909 (119896) 119909 (119896 + 1) le 119909max
(41)
where 119910119888 is the command for angle of attack 119910(119896 + 119894 | 119896) ispredictive value of angle of attack 119873 denotes the predictivehorizon 119876 and 119877 are the weighting matrices and 119877 =
diag(119877120575119911
119877119865119910
) 119877120575119911
119877119865119910
are weighted coefficients of aerody-namic control surfaces and lateral pulse jets respectivelyThe
ratio of 119877120575119911
and 119877119865119910
represents the control allocation betweenaerodynamic control surfaces and lateral pulse jets When119877119865119910
119877120575119911
is increased the requirement for lateral force will bedeclined that is the fuel consumption can be lessened Inaddition the deduction can be verified from the simulationresults of Case 1 and Case 2
Different control allocation between the dual actuators(aerodynamic control surfaces and lateral pulse jets) can beobtained by setting different 119876 and 119877 Since both logicaland continuous variables are involved in (41) the aboveon-line optimization problem is a mixed integer quadraticprogramming (MIQP) problemwhich can be solved by usingthe hybrid MPC toolbox of MATLAB [14 15]
Remark 2 In an explicit MPC controller the main factorsaffecting the number of subregions include the systemdimen-sion the predictive horizon and the number of constrains Inthis paper the blendedmissile with aerodynamic control sur-faces and lateral jets is investigated To deal with the discreteproperty of the lateral jet forces some logical variables areintroduced for MPC controller design which increases thenumber of subregions inevitably
5 Numerical Simulations
51 Case 1 Numerical simulations are performed to ver-ify the feasibility of the proposed method in this sectionThe involved parameters are given in Table 1 The weightmatrices are set as 119876 = 10 119877120575
119911
= 0025 and 119877119865119910
=
diag(0005 0005 0005) Suppose the initial state is 1205720 =0 1199030 = 0 In order to avoid excessive computational load wechoose predictive horizon119873 = 2 and control horizon119872 = 2The command for angle of attack is 120572119888 = 02 rad
Explicit form of the optimal controller is provided byhybrid toolbox which is not given here for simplicity Insteadwe present the partition results associated with the controllerin Figure 6 where 4190 subregions are obtained and for eachsubregion a control law of the form 119906 = 119870119909 + 119887 is givenAs a benefit of using explicit MPC the controller parameters119870 and 119887 for all the subregions are obtained simultaneouslyonce the optimization problem is solved This property isobviously different from that of gain-scheduled controller(where the controller parameters for different regions areseparately determined)
However by a simple calculation we conclude that thesesubregions donot require toomuch storage space (the neededstorage space is approximately 14 times 8 times 4190 = 450KB)Moreover it should be noted that when the algorithm isimplemented in practice much more time will be needed toidentify which subregion the current states enter into This isanother important factor that affects the computational costof the proposed algorithm
The simulation results are shown in Figures 7ndash9 It isseen from Figure 7 that the actual angle of attack tracksthe command in less than 01 seconds As shown in Figures8 and 9 the aerodynamic force converges to a constant astime increases while the jets are only activated during thebeginning period (when the tracking error is obvious)
International Journal of Aerospace Engineering 11
58
68
73
108
174
180
245
252
254
270
271
272
273
274
276
277
299
300
301
302
06
04
02
0
minus02
minus04
Elev
ator
defl
ectio
n (r
ad)
Angle of attack (rad)minus04 minus02 0 02 04 06
1634
1635
1638
1648
1649
1650
1664
1673
1677
1678
1679
1712
1726
1743
1744
1746
1748
1751
1752
1983
1985
1993
2011
Late
ral f
orce
(N)
Angle of attack (rad)minus04 minus02 0 02 04 06
1000
800
600
400
200
0
minus200
minus400
minus600
minus800
minus1000
Polyhedral partitionmdash4190 regions Polyhedral partitionmdash4190 regions
Figure 6 The partition associated with the explicit controller
025
02
015
01
005
0
ActualCommand
0 02 04 06 08 1
Time (s)
Ang
le o
f atta
ck (r
ad)
Figure 7 The response of angle of attack
52 Case 2 The results for the case with a different weight119877120575119911
= 0005 are shown in Figures 10ndash12 It is seen that adifferent control allocation result is obtained
04
02
0
minus02
minus04
minus060 02 04 06 08 1
Time (s)
Elev
ator
defl
ectio
n (r
ad)
Figure 8 The response of elevator deflection
53 Case 3 In this case a different command 120572119888 =
02 cos(05120587119905) rad is considered and the weight matrices arethe same as the ones for Case 1 The simulation results areshown in Figures 13ndash15
It is seen from Figure 13 that asymptotic tracking is alsoachievedThemethod proposed in this paper can realize both
12 International Journal of Aerospace Engineering
1
05
0
minus05
minus1
times104
0 02 04 06 08 1
Time (s)
Late
ral f
orce
(N)
Figure 9 The response of lateral force
025
02
015
01
005
0
Ang
le o
f atta
ck (r
ad)
0 02 04 06 08 1
Time (s)
ActualCommand
Figure 10 The response of angle of attack
06
04
02
0
minus02
minus04
minus06
minus08
Elev
ator
defl
ectio
n (r
ad)
0 02 04 06 08 1
Time (s)
Figure 11 The response of elevator deflection
1
05
0
minus05
minus1
Late
ral f
orce
(N)
times104
0 02 04 06 08 1
Time (s)
Figure 12 The response of lateral force
03
025
02
015
01
005
0
minus005
minus01
minus015
minus02
Ang
le o
f atta
ck (r
ad)
0 05 1 15 2 25 3 35 4
Time (s)
ActualCommand
Figure 13 The response of angle of attack
06
04
02
0
minus02
minus04
minus06
minus08
Elev
ator
defl
ectio
n (r
ad)
0 05 1 15 2 25 3 35 4
Time (s)
Figure 14 The response of elevator deflection
International Journal of Aerospace Engineering 13
1
08
06
04
02
0
minus02
minus04
minus06
minus08
minus1
Late
ral f
orce
(N)
0 05 1 15 2 25 3 35 4
Time (s)
times104
Figure 15 The response of lateral force
fast tracking command and control allocation It is seen fromFigure 15 that the jets are activated while the tracking erroris obvious or command is varying rapidly
6 Conclusion
An autopilot design method for a missile with aerodynamiccontrol surfaces and lateral jets is presented in this paperThe nonlinear attitude control model is reduced to an MLDmodel Meanwhile the lateral force is described as linearcombination of logical variables due to the discrete values oflateral force Then the whole MLD model of attitude controlsystem is derived Autopilot design is accomplished usinghybrid MPC method By setting the related weighted coeffi-cients in index function the control allocation is obtainedMoreover numerical simulations are performed under thedifferent conditions the performance of tracking the attitudecommand and control allocation is verified and the explicitform of the control law can be obtained as well
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research presented in this document is supportedby the National Natural Science Foundation of Chinaunder Grant nos 61104193 61203191 and 61333001 theFundamental Research Funds for the Central Universities(HITNSRIF2012032) the Program for IBRSEM in HarbinInstitute of Technology under Grant HITIBRSEMA201415and the Foundation of Supporting Technology for Aerospaceunder Grant 2014-HT-HGD7
References
[1] R Hirokawa K Sato and S Manabe ldquoAutopilot design fora missile with reaction-jet using coefficient diagram methodrdquoin Proceedings of the AIAA Guidance Navigation and ControlConference and Exhibit 2001 August 2001
[2] P K Menon and V R Iragavarapu Adaptive Techniques forMultiple Actuator Blending Defense Technical InformationCenter 1998
[3] A G Munson and M W Garbrick ldquoJet interaction investiga-tionrdquo Report OR-9933 Martin Marietta Orlando Fla USA1969
[4] M Graham and P Weinacht ldquoNumerical simulation of lateralcontrol jetsrdquo in Proceedings of the 37th Aerospace SciencesMeeting and Exhibit 1999 AIAA Paper
[5] J S Shamma and J R Cloutier ldquoGain-scheduledmissile autopi-lot design using linear parameter varying transformationsrdquoJournal of Guidance Control and Dynamics vol 16 no 2 pp256ndash263 1993
[6] M Innocenti and A Thukral ldquoSimultaneous reaction jet andaerodynamic control of missile systemsrdquo AlAA 93-3739-CP1993
[7] D B Ridgely Y Lee and T Fanciullo ldquoDual aeropropulsivemissile control-optimal control and control allocationrdquo inProceedings of the AIAA Guidance Navigation and ControlConference and Exhibit Keystone Colo USA 2006
[8] D B Ridgely D Drake L Triplett and C Geise ldquoDynamiccontrol allocation of a missile with tails and reaction jetsrdquo inProceedings of the AIAA Guidance Navigation and ControlConference pp 3158ndash3189 August 2007
[9] D Q Mayne J B Rawlings C V Rao and P O ScokaertldquoConstrained model predictive control stability and optimal-ityrdquo Automatica vol 36 no 6 pp 789ndash814 2000
[10] A Bemporad F Borrelli and M Morari ldquoModel predictivecontrol based on linear programmingmdashthe explicit solutionrdquoIEEE Transactions on Automatic Control vol 47 no 12 pp1974ndash1985 2002
[11] C Jouannet and P Krus ldquoModelling of high angle of attackaerodynamicrdquo in Proceedings of the 25th AIAA Applied Aerody-namics Conference pp 1481ndash1516 June 2007
[12] S Venugopal and M Krishnamurthy ldquoMissile aerodynamics athigh angles of attack a prediction coderdquo Journal of Spacecraftand Rockets vol 32 no 2 pp 263ndash269 1995
[13] A Bemporad ldquoEfficient conversion of mixed logical dynamicalsystems into an equivalent piecewise affine formrdquo IEEE Trans-actions on Automatic Control vol 49 no 5 pp 832ndash838 2004
[14] F D Torrisi andA Bemporad ldquoHYSDELmdasha tool for generatingcomputational hybrid models for analysis and synthesis prob-lemsrdquo IEEE Transactions on Control Systems Technology vol 12no 2 pp 235ndash249 2004
[15] A Bemporad W P M H Heemels and B De SchutterldquoOn hybrid systems and closed-loop MPC systemsrdquo IEEETransactions on Automatic Control vol 47 no 5 pp 863ndash8692002
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 11
58
68
73
108
174
180
245
252
254
270
271
272
273
274
276
277
299
300
301
302
06
04
02
0
minus02
minus04
Elev
ator
defl
ectio
n (r
ad)
Angle of attack (rad)minus04 minus02 0 02 04 06
1634
1635
1638
1648
1649
1650
1664
1673
1677
1678
1679
1712
1726
1743
1744
1746
1748
1751
1752
1983
1985
1993
2011
Late
ral f
orce
(N)
Angle of attack (rad)minus04 minus02 0 02 04 06
1000
800
600
400
200
0
minus200
minus400
minus600
minus800
minus1000
Polyhedral partitionmdash4190 regions Polyhedral partitionmdash4190 regions
Figure 6 The partition associated with the explicit controller
025
02
015
01
005
0
ActualCommand
0 02 04 06 08 1
Time (s)
Ang
le o
f atta
ck (r
ad)
Figure 7 The response of angle of attack
52 Case 2 The results for the case with a different weight119877120575119911
= 0005 are shown in Figures 10ndash12 It is seen that adifferent control allocation result is obtained
04
02
0
minus02
minus04
minus060 02 04 06 08 1
Time (s)
Elev
ator
defl
ectio
n (r
ad)
Figure 8 The response of elevator deflection
53 Case 3 In this case a different command 120572119888 =
02 cos(05120587119905) rad is considered and the weight matrices arethe same as the ones for Case 1 The simulation results areshown in Figures 13ndash15
It is seen from Figure 13 that asymptotic tracking is alsoachievedThemethod proposed in this paper can realize both
12 International Journal of Aerospace Engineering
1
05
0
minus05
minus1
times104
0 02 04 06 08 1
Time (s)
Late
ral f
orce
(N)
Figure 9 The response of lateral force
025
02
015
01
005
0
Ang
le o
f atta
ck (r
ad)
0 02 04 06 08 1
Time (s)
ActualCommand
Figure 10 The response of angle of attack
06
04
02
0
minus02
minus04
minus06
minus08
Elev
ator
defl
ectio
n (r
ad)
0 02 04 06 08 1
Time (s)
Figure 11 The response of elevator deflection
1
05
0
minus05
minus1
Late
ral f
orce
(N)
times104
0 02 04 06 08 1
Time (s)
Figure 12 The response of lateral force
03
025
02
015
01
005
0
minus005
minus01
minus015
minus02
Ang
le o
f atta
ck (r
ad)
0 05 1 15 2 25 3 35 4
Time (s)
ActualCommand
Figure 13 The response of angle of attack
06
04
02
0
minus02
minus04
minus06
minus08
Elev
ator
defl
ectio
n (r
ad)
0 05 1 15 2 25 3 35 4
Time (s)
Figure 14 The response of elevator deflection
International Journal of Aerospace Engineering 13
1
08
06
04
02
0
minus02
minus04
minus06
minus08
minus1
Late
ral f
orce
(N)
0 05 1 15 2 25 3 35 4
Time (s)
times104
Figure 15 The response of lateral force
fast tracking command and control allocation It is seen fromFigure 15 that the jets are activated while the tracking erroris obvious or command is varying rapidly
6 Conclusion
An autopilot design method for a missile with aerodynamiccontrol surfaces and lateral jets is presented in this paperThe nonlinear attitude control model is reduced to an MLDmodel Meanwhile the lateral force is described as linearcombination of logical variables due to the discrete values oflateral force Then the whole MLD model of attitude controlsystem is derived Autopilot design is accomplished usinghybrid MPC method By setting the related weighted coeffi-cients in index function the control allocation is obtainedMoreover numerical simulations are performed under thedifferent conditions the performance of tracking the attitudecommand and control allocation is verified and the explicitform of the control law can be obtained as well
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research presented in this document is supportedby the National Natural Science Foundation of Chinaunder Grant nos 61104193 61203191 and 61333001 theFundamental Research Funds for the Central Universities(HITNSRIF2012032) the Program for IBRSEM in HarbinInstitute of Technology under Grant HITIBRSEMA201415and the Foundation of Supporting Technology for Aerospaceunder Grant 2014-HT-HGD7
References
[1] R Hirokawa K Sato and S Manabe ldquoAutopilot design fora missile with reaction-jet using coefficient diagram methodrdquoin Proceedings of the AIAA Guidance Navigation and ControlConference and Exhibit 2001 August 2001
[2] P K Menon and V R Iragavarapu Adaptive Techniques forMultiple Actuator Blending Defense Technical InformationCenter 1998
[3] A G Munson and M W Garbrick ldquoJet interaction investiga-tionrdquo Report OR-9933 Martin Marietta Orlando Fla USA1969
[4] M Graham and P Weinacht ldquoNumerical simulation of lateralcontrol jetsrdquo in Proceedings of the 37th Aerospace SciencesMeeting and Exhibit 1999 AIAA Paper
[5] J S Shamma and J R Cloutier ldquoGain-scheduledmissile autopi-lot design using linear parameter varying transformationsrdquoJournal of Guidance Control and Dynamics vol 16 no 2 pp256ndash263 1993
[6] M Innocenti and A Thukral ldquoSimultaneous reaction jet andaerodynamic control of missile systemsrdquo AlAA 93-3739-CP1993
[7] D B Ridgely Y Lee and T Fanciullo ldquoDual aeropropulsivemissile control-optimal control and control allocationrdquo inProceedings of the AIAA Guidance Navigation and ControlConference and Exhibit Keystone Colo USA 2006
[8] D B Ridgely D Drake L Triplett and C Geise ldquoDynamiccontrol allocation of a missile with tails and reaction jetsrdquo inProceedings of the AIAA Guidance Navigation and ControlConference pp 3158ndash3189 August 2007
[9] D Q Mayne J B Rawlings C V Rao and P O ScokaertldquoConstrained model predictive control stability and optimal-ityrdquo Automatica vol 36 no 6 pp 789ndash814 2000
[10] A Bemporad F Borrelli and M Morari ldquoModel predictivecontrol based on linear programmingmdashthe explicit solutionrdquoIEEE Transactions on Automatic Control vol 47 no 12 pp1974ndash1985 2002
[11] C Jouannet and P Krus ldquoModelling of high angle of attackaerodynamicrdquo in Proceedings of the 25th AIAA Applied Aerody-namics Conference pp 1481ndash1516 June 2007
[12] S Venugopal and M Krishnamurthy ldquoMissile aerodynamics athigh angles of attack a prediction coderdquo Journal of Spacecraftand Rockets vol 32 no 2 pp 263ndash269 1995
[13] A Bemporad ldquoEfficient conversion of mixed logical dynamicalsystems into an equivalent piecewise affine formrdquo IEEE Trans-actions on Automatic Control vol 49 no 5 pp 832ndash838 2004
[14] F D Torrisi andA Bemporad ldquoHYSDELmdasha tool for generatingcomputational hybrid models for analysis and synthesis prob-lemsrdquo IEEE Transactions on Control Systems Technology vol 12no 2 pp 235ndash249 2004
[15] A Bemporad W P M H Heemels and B De SchutterldquoOn hybrid systems and closed-loop MPC systemsrdquo IEEETransactions on Automatic Control vol 47 no 5 pp 863ndash8692002
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

12 International Journal of Aerospace Engineering
1
05
0
minus05
minus1
times104
0 02 04 06 08 1
Time (s)
Late
ral f
orce
(N)
Figure 9 The response of lateral force
025
02
015
01
005
0
Ang
le o
f atta
ck (r
ad)
0 02 04 06 08 1
Time (s)
ActualCommand
Figure 10 The response of angle of attack
06
04
02
0
minus02
minus04
minus06
minus08
Elev
ator
defl
ectio
n (r
ad)
0 02 04 06 08 1
Time (s)
Figure 11 The response of elevator deflection
1
05
0
minus05
minus1
Late
ral f
orce
(N)
times104
0 02 04 06 08 1
Time (s)
Figure 12 The response of lateral force
03
025
02
015
01
005
0
minus005
minus01
minus015
minus02
Ang
le o
f atta
ck (r
ad)
0 05 1 15 2 25 3 35 4
Time (s)
ActualCommand
Figure 13 The response of angle of attack
06
04
02
0
minus02
minus04
minus06
minus08
Elev
ator
defl
ectio
n (r
ad)
0 05 1 15 2 25 3 35 4
Time (s)
Figure 14 The response of elevator deflection
International Journal of Aerospace Engineering 13
1
08
06
04
02
0
minus02
minus04
minus06
minus08
minus1
Late
ral f
orce
(N)
0 05 1 15 2 25 3 35 4
Time (s)
times104
Figure 15 The response of lateral force
fast tracking command and control allocation It is seen fromFigure 15 that the jets are activated while the tracking erroris obvious or command is varying rapidly
6 Conclusion
An autopilot design method for a missile with aerodynamiccontrol surfaces and lateral jets is presented in this paperThe nonlinear attitude control model is reduced to an MLDmodel Meanwhile the lateral force is described as linearcombination of logical variables due to the discrete values oflateral force Then the whole MLD model of attitude controlsystem is derived Autopilot design is accomplished usinghybrid MPC method By setting the related weighted coeffi-cients in index function the control allocation is obtainedMoreover numerical simulations are performed under thedifferent conditions the performance of tracking the attitudecommand and control allocation is verified and the explicitform of the control law can be obtained as well
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research presented in this document is supportedby the National Natural Science Foundation of Chinaunder Grant nos 61104193 61203191 and 61333001 theFundamental Research Funds for the Central Universities(HITNSRIF2012032) the Program for IBRSEM in HarbinInstitute of Technology under Grant HITIBRSEMA201415and the Foundation of Supporting Technology for Aerospaceunder Grant 2014-HT-HGD7
References
[1] R Hirokawa K Sato and S Manabe ldquoAutopilot design fora missile with reaction-jet using coefficient diagram methodrdquoin Proceedings of the AIAA Guidance Navigation and ControlConference and Exhibit 2001 August 2001
[2] P K Menon and V R Iragavarapu Adaptive Techniques forMultiple Actuator Blending Defense Technical InformationCenter 1998
[3] A G Munson and M W Garbrick ldquoJet interaction investiga-tionrdquo Report OR-9933 Martin Marietta Orlando Fla USA1969
[4] M Graham and P Weinacht ldquoNumerical simulation of lateralcontrol jetsrdquo in Proceedings of the 37th Aerospace SciencesMeeting and Exhibit 1999 AIAA Paper
[5] J S Shamma and J R Cloutier ldquoGain-scheduledmissile autopi-lot design using linear parameter varying transformationsrdquoJournal of Guidance Control and Dynamics vol 16 no 2 pp256ndash263 1993
[6] M Innocenti and A Thukral ldquoSimultaneous reaction jet andaerodynamic control of missile systemsrdquo AlAA 93-3739-CP1993
[7] D B Ridgely Y Lee and T Fanciullo ldquoDual aeropropulsivemissile control-optimal control and control allocationrdquo inProceedings of the AIAA Guidance Navigation and ControlConference and Exhibit Keystone Colo USA 2006
[8] D B Ridgely D Drake L Triplett and C Geise ldquoDynamiccontrol allocation of a missile with tails and reaction jetsrdquo inProceedings of the AIAA Guidance Navigation and ControlConference pp 3158ndash3189 August 2007
[9] D Q Mayne J B Rawlings C V Rao and P O ScokaertldquoConstrained model predictive control stability and optimal-ityrdquo Automatica vol 36 no 6 pp 789ndash814 2000
[10] A Bemporad F Borrelli and M Morari ldquoModel predictivecontrol based on linear programmingmdashthe explicit solutionrdquoIEEE Transactions on Automatic Control vol 47 no 12 pp1974ndash1985 2002
[11] C Jouannet and P Krus ldquoModelling of high angle of attackaerodynamicrdquo in Proceedings of the 25th AIAA Applied Aerody-namics Conference pp 1481ndash1516 June 2007
[12] S Venugopal and M Krishnamurthy ldquoMissile aerodynamics athigh angles of attack a prediction coderdquo Journal of Spacecraftand Rockets vol 32 no 2 pp 263ndash269 1995
[13] A Bemporad ldquoEfficient conversion of mixed logical dynamicalsystems into an equivalent piecewise affine formrdquo IEEE Trans-actions on Automatic Control vol 49 no 5 pp 832ndash838 2004
[14] F D Torrisi andA Bemporad ldquoHYSDELmdasha tool for generatingcomputational hybrid models for analysis and synthesis prob-lemsrdquo IEEE Transactions on Control Systems Technology vol 12no 2 pp 235ndash249 2004
[15] A Bemporad W P M H Heemels and B De SchutterldquoOn hybrid systems and closed-loop MPC systemsrdquo IEEETransactions on Automatic Control vol 47 no 5 pp 863ndash8692002
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
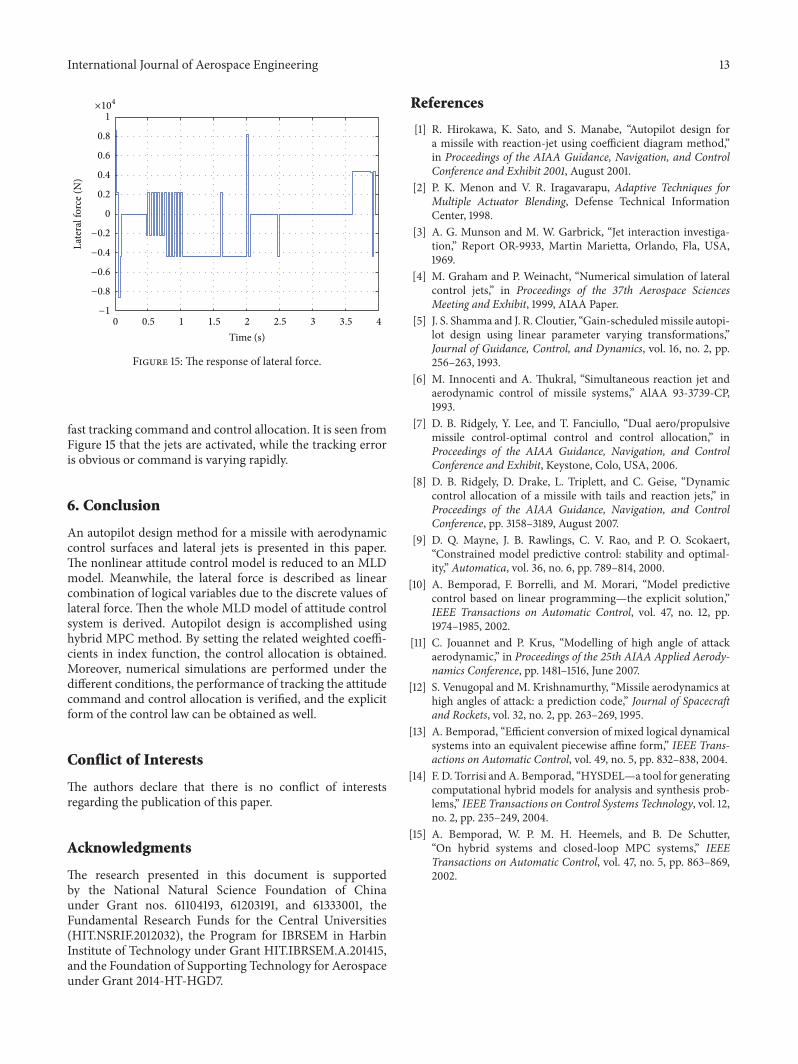
International Journal of Aerospace Engineering 13
1
08
06
04
02
0
minus02
minus04
minus06
minus08
minus1
Late
ral f
orce
(N)
0 05 1 15 2 25 3 35 4
Time (s)
times104
Figure 15 The response of lateral force
fast tracking command and control allocation It is seen fromFigure 15 that the jets are activated while the tracking erroris obvious or command is varying rapidly
6 Conclusion
An autopilot design method for a missile with aerodynamiccontrol surfaces and lateral jets is presented in this paperThe nonlinear attitude control model is reduced to an MLDmodel Meanwhile the lateral force is described as linearcombination of logical variables due to the discrete values oflateral force Then the whole MLD model of attitude controlsystem is derived Autopilot design is accomplished usinghybrid MPC method By setting the related weighted coeffi-cients in index function the control allocation is obtainedMoreover numerical simulations are performed under thedifferent conditions the performance of tracking the attitudecommand and control allocation is verified and the explicitform of the control law can be obtained as well
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research presented in this document is supportedby the National Natural Science Foundation of Chinaunder Grant nos 61104193 61203191 and 61333001 theFundamental Research Funds for the Central Universities(HITNSRIF2012032) the Program for IBRSEM in HarbinInstitute of Technology under Grant HITIBRSEMA201415and the Foundation of Supporting Technology for Aerospaceunder Grant 2014-HT-HGD7
References
[1] R Hirokawa K Sato and S Manabe ldquoAutopilot design fora missile with reaction-jet using coefficient diagram methodrdquoin Proceedings of the AIAA Guidance Navigation and ControlConference and Exhibit 2001 August 2001
[2] P K Menon and V R Iragavarapu Adaptive Techniques forMultiple Actuator Blending Defense Technical InformationCenter 1998
[3] A G Munson and M W Garbrick ldquoJet interaction investiga-tionrdquo Report OR-9933 Martin Marietta Orlando Fla USA1969
[4] M Graham and P Weinacht ldquoNumerical simulation of lateralcontrol jetsrdquo in Proceedings of the 37th Aerospace SciencesMeeting and Exhibit 1999 AIAA Paper
[5] J S Shamma and J R Cloutier ldquoGain-scheduledmissile autopi-lot design using linear parameter varying transformationsrdquoJournal of Guidance Control and Dynamics vol 16 no 2 pp256ndash263 1993
[6] M Innocenti and A Thukral ldquoSimultaneous reaction jet andaerodynamic control of missile systemsrdquo AlAA 93-3739-CP1993
[7] D B Ridgely Y Lee and T Fanciullo ldquoDual aeropropulsivemissile control-optimal control and control allocationrdquo inProceedings of the AIAA Guidance Navigation and ControlConference and Exhibit Keystone Colo USA 2006
[8] D B Ridgely D Drake L Triplett and C Geise ldquoDynamiccontrol allocation of a missile with tails and reaction jetsrdquo inProceedings of the AIAA Guidance Navigation and ControlConference pp 3158ndash3189 August 2007
[9] D Q Mayne J B Rawlings C V Rao and P O ScokaertldquoConstrained model predictive control stability and optimal-ityrdquo Automatica vol 36 no 6 pp 789ndash814 2000
[10] A Bemporad F Borrelli and M Morari ldquoModel predictivecontrol based on linear programmingmdashthe explicit solutionrdquoIEEE Transactions on Automatic Control vol 47 no 12 pp1974ndash1985 2002
[11] C Jouannet and P Krus ldquoModelling of high angle of attackaerodynamicrdquo in Proceedings of the 25th AIAA Applied Aerody-namics Conference pp 1481ndash1516 June 2007
[12] S Venugopal and M Krishnamurthy ldquoMissile aerodynamics athigh angles of attack a prediction coderdquo Journal of Spacecraftand Rockets vol 32 no 2 pp 263ndash269 1995
[13] A Bemporad ldquoEfficient conversion of mixed logical dynamicalsystems into an equivalent piecewise affine formrdquo IEEE Trans-actions on Automatic Control vol 49 no 5 pp 832ndash838 2004
[14] F D Torrisi andA Bemporad ldquoHYSDELmdasha tool for generatingcomputational hybrid models for analysis and synthesis prob-lemsrdquo IEEE Transactions on Control Systems Technology vol 12no 2 pp 235ndash249 2004
[15] A Bemporad W P M H Heemels and B De SchutterldquoOn hybrid systems and closed-loop MPC systemsrdquo IEEETransactions on Automatic Control vol 47 no 5 pp 863ndash8692002
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of