ring car following models by sharon gibson and mark mccartney school of computing & mathematics,...
TRANSCRIPT

Ring Car Following Ring Car Following ModelsModels
byby
Sharon Gibson and Mark McCartneySharon Gibson and Mark McCartney
School of Computing & Mathematics, University of Ulster at JordanstownSchool of Computing & Mathematics, University of Ulster at Jordanstown
Mathematical models which describe how individual drivers follow one another in a stream of traffic.
Many different approaches, including:
Fuzzy logic
Cellular Automata (CA)
Differential equations
Difference equations
Car Following ModelsCar Following Models
Car Following ModelsCar Following Models
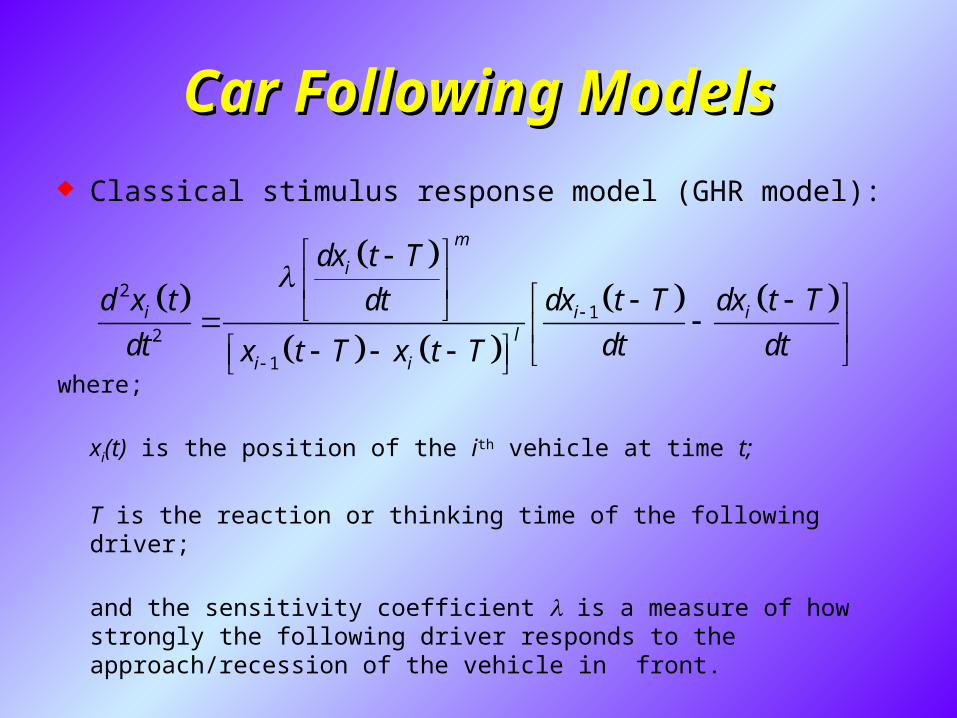
Classical stimulus response model (GHR model):
where;
xi(t) is the position of the ith vehicle at time t;
T is the reaction or thinking time of the following driver;
and the sensitivity coefficient is a measure of how strongly the following driver responds to the approach/recession of the vehicle in front.
2
12
1
m
i
i i il
i i
dx t T
d x t dx t T dx t Tdt
dt dt dtx t T x t T
Car Following ModelsCar Following Models
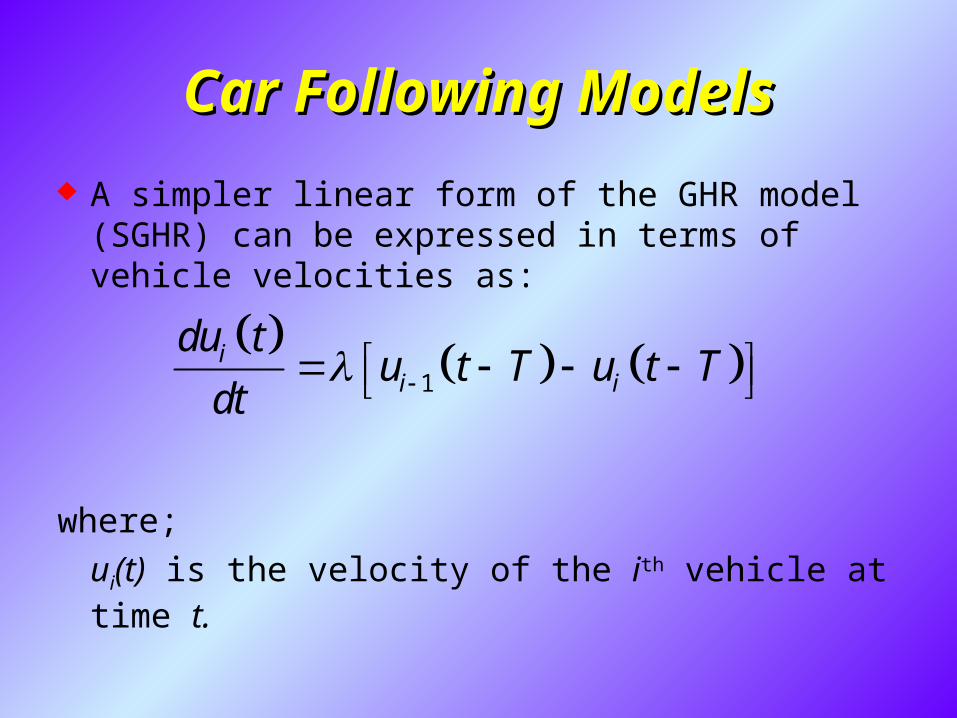
A simpler linear form of the GHR model (SGHR) can be expressed in terms of vehicle velocities as:
where;
ui(t) is the velocity of the ith vehicle at time t.
1i
i i
du tu t T u t T
dt
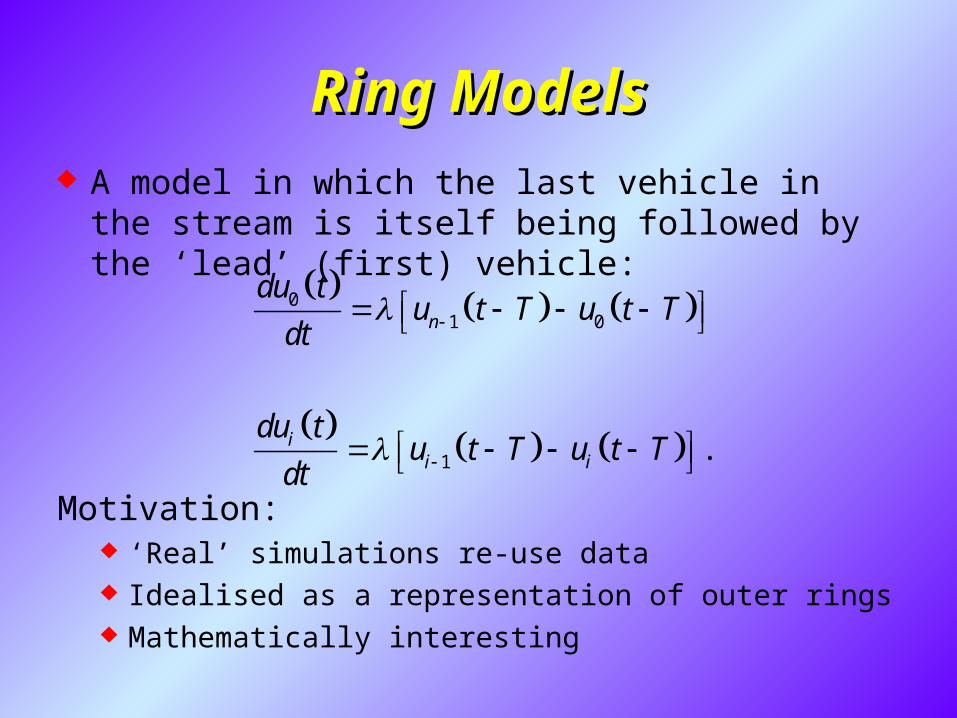
Ring ModelsRing Models A model in which the last vehicle in the stream is
itself being followed by the ‘lead’ (first) vehicle:
Motivation: ‘Real’ simulations re-use data Idealised as a representation of outer rings Mathematically interesting
01 0
1 .
n
ii i
du tu t T u t T
dt
du tu t T u t T
dt
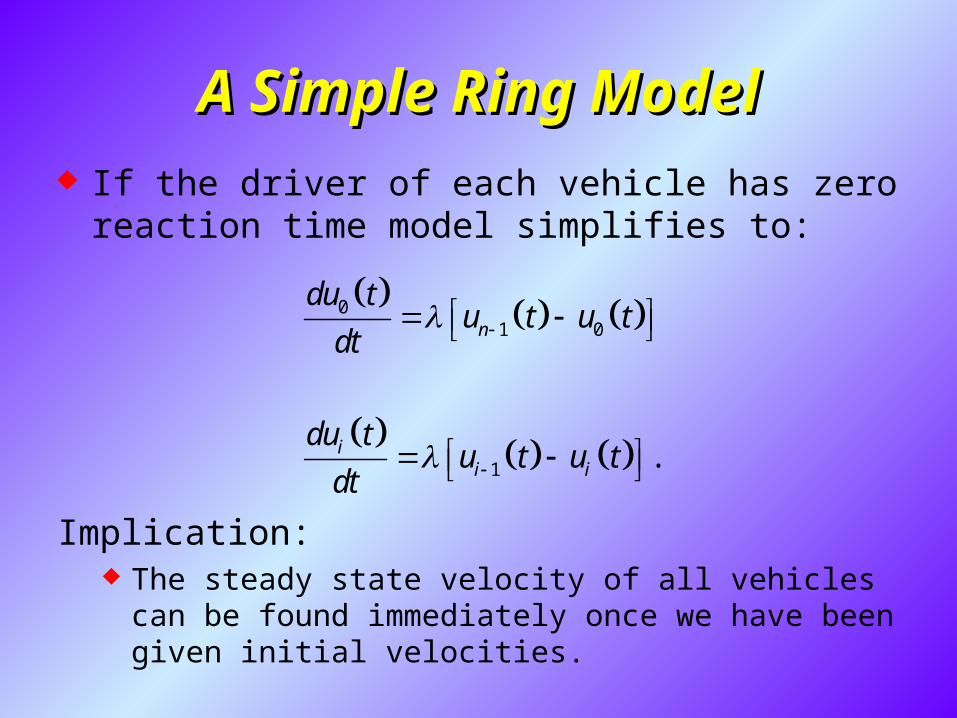
A Simple Ring ModelA Simple Ring Model If the driver of each vehicle has zero reaction time
model simplifies to:
Implication: The steady state velocity of all vehicles can be found
immediately once we have been given initial velocities.
01 0
1 .
n
ii i
du tu t u t
dt
du tu t u t
dt
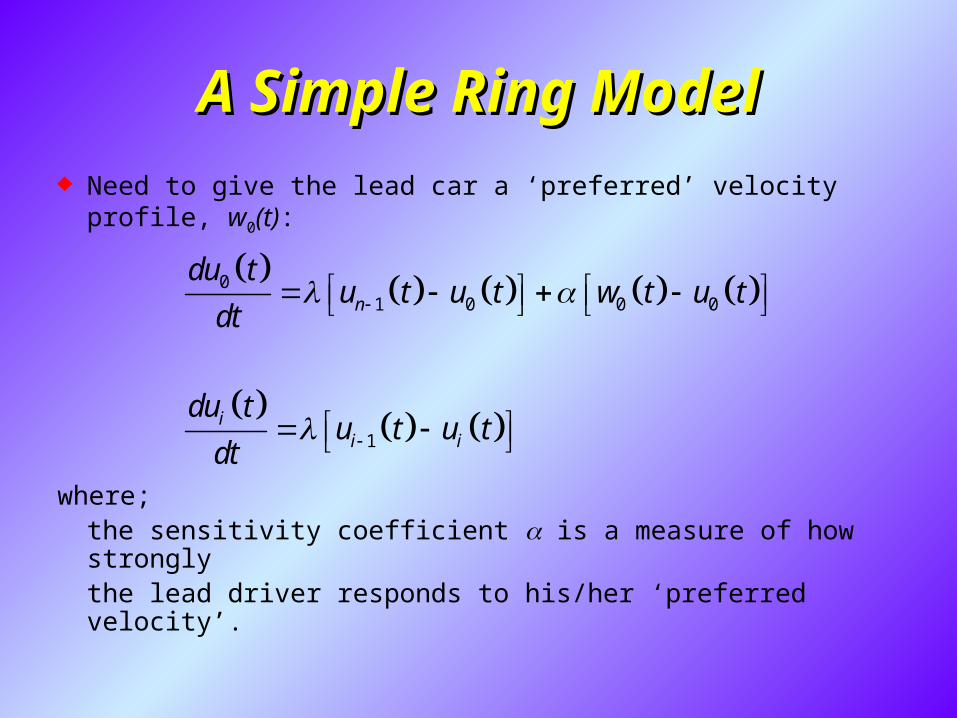
A Simple Ring ModelA Simple Ring Model
Need to give the lead car a ‘preferred’ velocity profile, w0(t):
where;the sensitivity coefficient is a measure of how stronglythe lead driver responds to his/her ‘preferred velocity’.
01 0 0 0
1
n
ii i
du tu t u t w t u t
dt
du tu t u t
dt
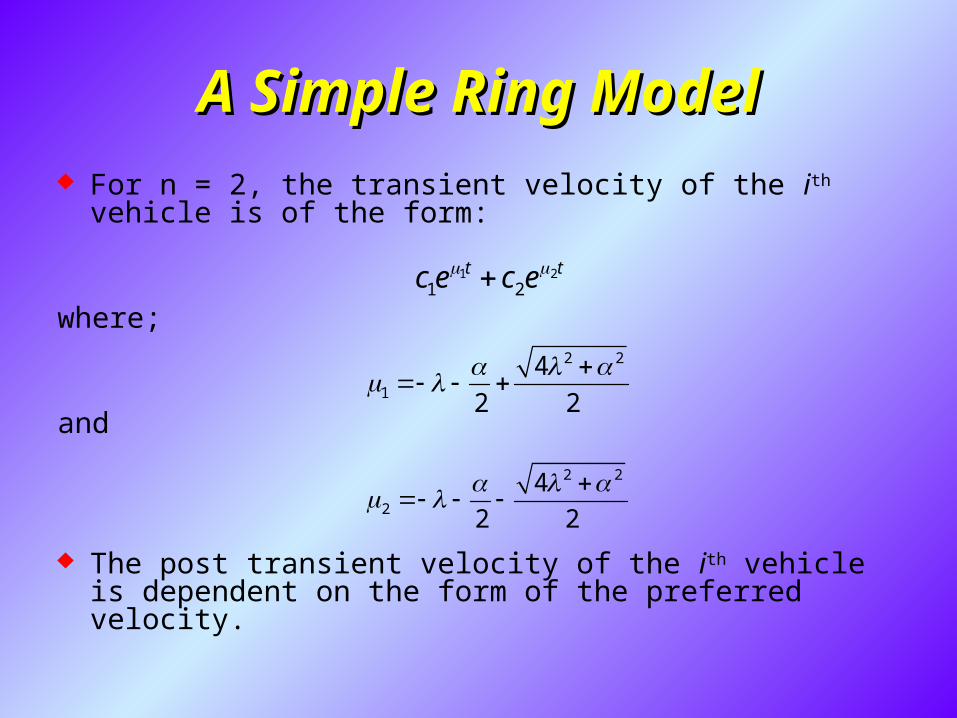
A Simple Ring ModelA Simple Ring Model For n = 2, the transient velocity of the ith vehicle is of the
form:
where;
and
The post transient velocity of the ith vehicle is dependent on the form of the preferred velocity.
1 21 2
t tc e c e
2 2
1
4
2 2
2 2
2
4
2 2
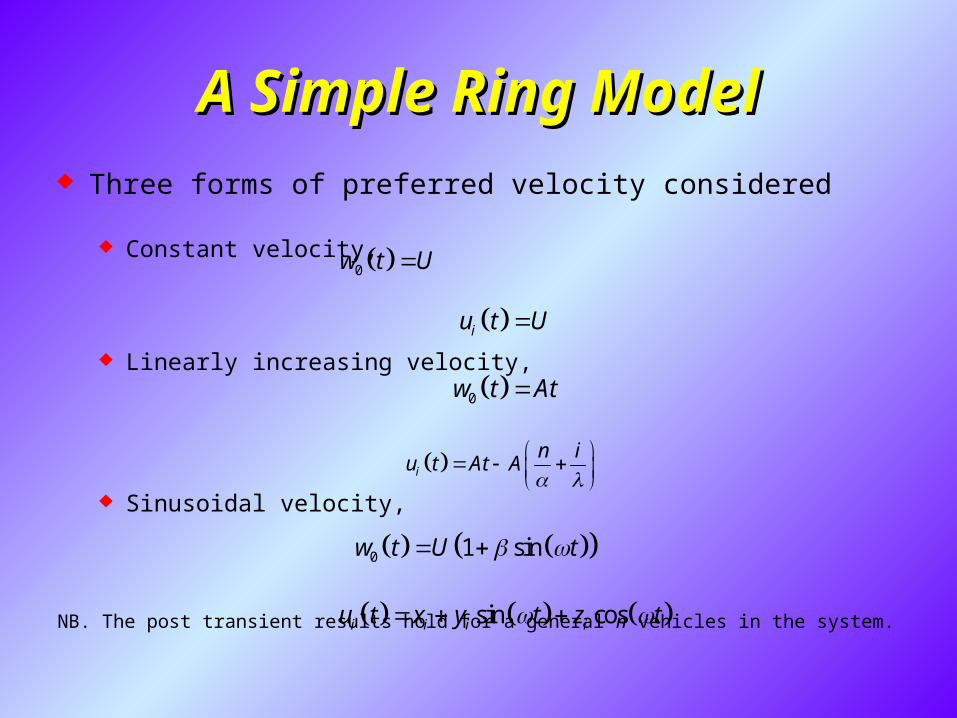
A Simple Ring ModelA Simple Ring Model Three forms of preferred velocity considered
Constant velocity,
Linearly increasing velocity,
Sinusoidal velocity,
NB. The post transient results hold for a general n vehicles in the system.
0w t U
iu t U
0w t At
i
n iu t At A
0 1 sinw t U t
sin cosi i i iu t x y t z t

ix U
1 2 1 222
0 02 2 2 1 20 0
1 1
iii i j i j
j j
i i j i jj j
i iy z yC C
12 2 12 2
0 02 2 2 2 10 0
1 1
i ii i j i j
j j
i i j i jj j
i iz z yC C
0 22 2 2
1
2 1
U by
a a b
0 22 2 22 1
U az
a a b
1
11 1 2 12
2 2 1 2 10
11
nn n j
j
n jj
na C
1
1 1 22
2 2 1 20
11
nn n j
j
n jj
nb C
where
and
where

Ring Model with Time DelayRing Model with Time Delay
♦ This new ring model when the drivers reaction times are included can be expressed as:
♦ We solve this system of Time Delay Differential Equations (TDDE) numerically using a RK4 routine
01 0 0 0
1
n
ii i
du tu t T u t T w t T u t T
dt
du tu t T u t T
dt
Approximating Time DelayApproximating Time Delay
An approximate solution to the Time Delay Differential Equation (TDDE) form of the Ring Model can be found using a Taylor’s series expansion in time delay, T:
0 11 0
0 00
1 0 10 1
du t du tu t T u t
dt dtdu t dw t
T w t Tdt dt
du t du t du tu t T u t T
dt dt dt

Approximating Time DelayApproximating Time Delay
For n = 2, the transient velocity of the ith vehicle is of the form:
where;
and
If system is to reach steady state then:
1 21 2
t tc e c e
2 2
1
42 2
1 2 1
T
T T T
2 2
2
42 2
1 2 1
T
T T T
2 22 4
2T

Comparison of Zero Time Delay, Taylor’s Series Approximation Comparison of Zero Time Delay, Taylor’s Series Approximation
& RK4 Numerical Methods& RK4 Numerical Methods
0 20 40 60 80 100-5
0
5
10
15
20
25
30
t = 0.1s, = 0.3s-1, = 0.8s-1
u0(t) (T = 0s)
u1(t) (T = 0s)
u0(t) (RK4, T = 0.7s)
u1(t) (RK4, T = 0.7s)
u0(t) (TSE, T = 0.7s)
u1(t) (TSE, T = 0.7s)
velo
city
ui(t
) (m
s-1)
time (seconds)

Stability of the Ring ModelStability of the Ring Model
System is locally stable if each car in the system eventually reaches a steady state velocity. Non-oscillatory motion Damped oscillatory motion
Stability criteria is dependent upon the number of vehicles in the system. General criteria for n = 2:
Criteria for n > 2 currently under investigation – One of the boundaries obtained for n = 3:
Hypothesis: The stable region for each value of n > 2 is bounded by exactly 2 boundaries.
22
2
T
T T
2 2 2
2 2 2
12 6
2 4 4
T T
T T T
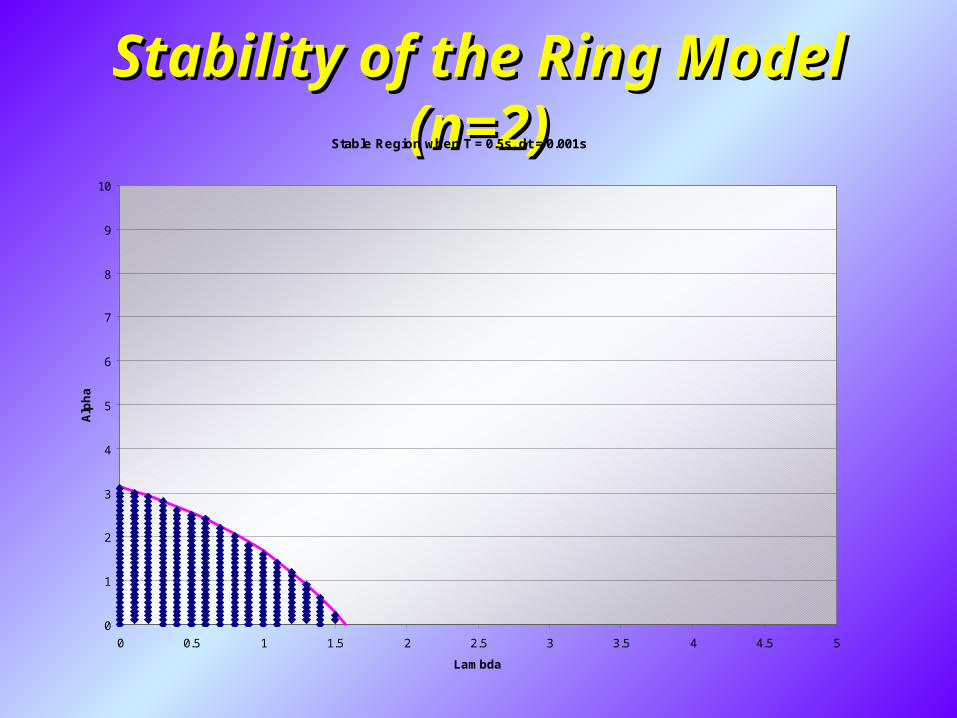
Stability of the Ring Model (n=2)Stability of the Ring Model (n=2)Stable Region when T = 0.5s, dt = 0.001s
0
1
2
3
4
5
6
7
8
9
10
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Lambda
Alp
ha
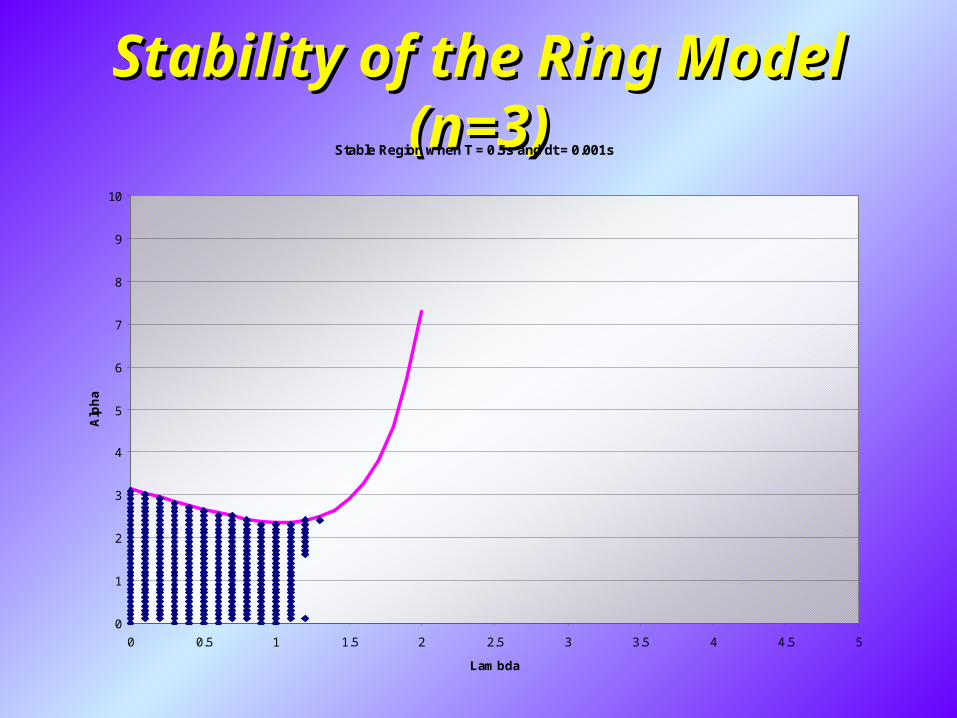
Stability of the Ring Model (n=3)Stability of the Ring Model (n=3)Stable Region when T = 0.5s and dt = 0.001s
0
1
2
3
4
5
6
7
8
9
10
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Lambda
Alp
ha
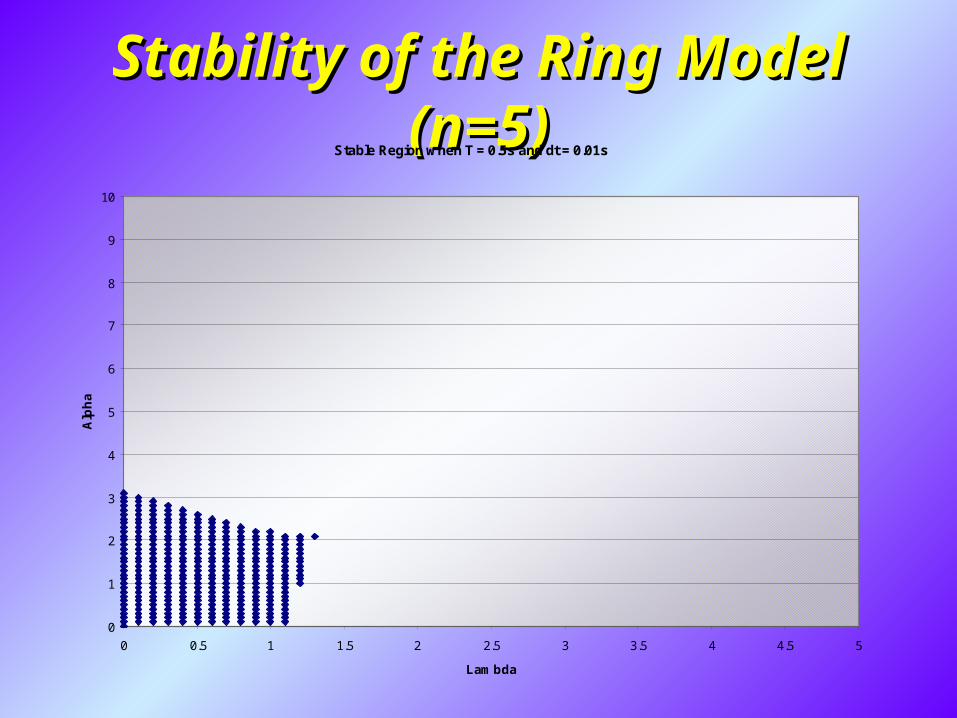
Stability of the Ring Model (n=5)Stability of the Ring Model (n=5)Stable Region when T = 0.5s and dt = 0.01s
0
1
2
3
4
5
6
7
8
9
10
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Lambda
Alp
ha
Future WorkFuture Work
Investigate discrete time models, as:
Easier to implement (Computationally faster)
Arguably more realistic
More likely to give rise to chaotic behaviour

Stability of the Ring Model (n=2)Stability of the Ring Model (n=2)(Euler Method)(Euler Method)Stable Region when T = 0.5s and dt = 0.001s
0
1
2
3
4
5
6
7
8
9
10
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Lambda
Alp
ha

Questions?Questions?