rope attribute measurement system for gondola type ... -...
TRANSCRIPT

Rope Attribute Measurement System for Gondola Type Façade Robot
Dong Yeop Kim 1+, Joon Ho Kwon 1, Hwadong Sun 1, Bong-Seok Kim 1 and Chang-Woo Park 1 1 Intelligent Robotics Research Center, Korea Electronics Technology Institute,
Bucheon-si, Gyeonggi-do, Korea
Abstract. The façade of high-rise building is hard to maintenance by human labor. Robot system can be applied to avoid this danger. The orientation and localization information should be guaranteed to accomplish it. In this paper, a novel sensor system is proposed. It perceive the rope attribute of gondola type building maintenance robot.
Keywords: gondola, robot, building facade, rope attribute, sensor
1. Introduction Gondola in construction is useful equipment for maintaining building façades. Even though the height of
buildings approach over 300m, the requirement of gondola does not decrease. However, gondola is dangerous. Falling accidents of gondolas occur frequently. Thus, cost of gondola labour is high, and it is difficult to find skilled workers. We try to automate this gondola with robot system. It makes workers to stay in safe area and just monitor gondola robot system.
As E. Gambao and M. Hernando H. categorized, there are many kinematic approaches to façade cleaning robot [1]. There are rail guided robots, robots tensed up with cables, air suction robots, and gondola-typed robot. Zhang et al. showed a glass wall cleaning robot using cylinders driven by solenoid valves to attach on the wall [2]. The CAFE robotic system is an example of gondola typed robot [2].
With above approaches, we try to put more intelligence to gondola robot. As beginning, we design sensor systems that are appropriate to gondola type. In this paper, we present a novel sensor system to measure attribute of wire rope tensing up gondola robot.
2. Rope Attribute Measurement System
2.1. Rope Attribute To automate a gondola robot, intelligence should be added. It will simplify steps to maintaining building
facades. Workers may need to monitor and back up only. Human falling accidents will decrease extremely. Before designing this intelligence, we should secure proper sensor systems for gondola robot. Because intelligence is based on perceived data, it is important to produce meaningful sensor data.
Self posture and localization estimating is essential intelligence related to gondola. Other applications require highly accurate localization information. For localization intelligence, many kind of data can be applied. Among them, we focus on the rope attribute because high-rise buildings are unfavourable condition to sensor system. At the middle of the building, the gondola cage is located far from both of roof and ground. Therefore it is hard to get supports from them. Communications may be cut or delayed. Additionally, rope attribute can be a solution for fail-safe of sensor system.
Information from rope attribute needs an assumption that the wire rope from the gondola hanger to the gondola cage is straight and tight. This is feasible because gondola cage with robot system, automated tools, and consumable supplies (water or detergent) is presumed that its weight is over one ton. Additionally,
+ Corresponding author. Tel.: + 82-32-328-2859; fax: +82-32-621-2866. E-mail address: sword32.
2011 2nd International Conference on Construction and Project Management IPEDR vol.15 (2011) © (2011) IACSIT Press, Singapore
103
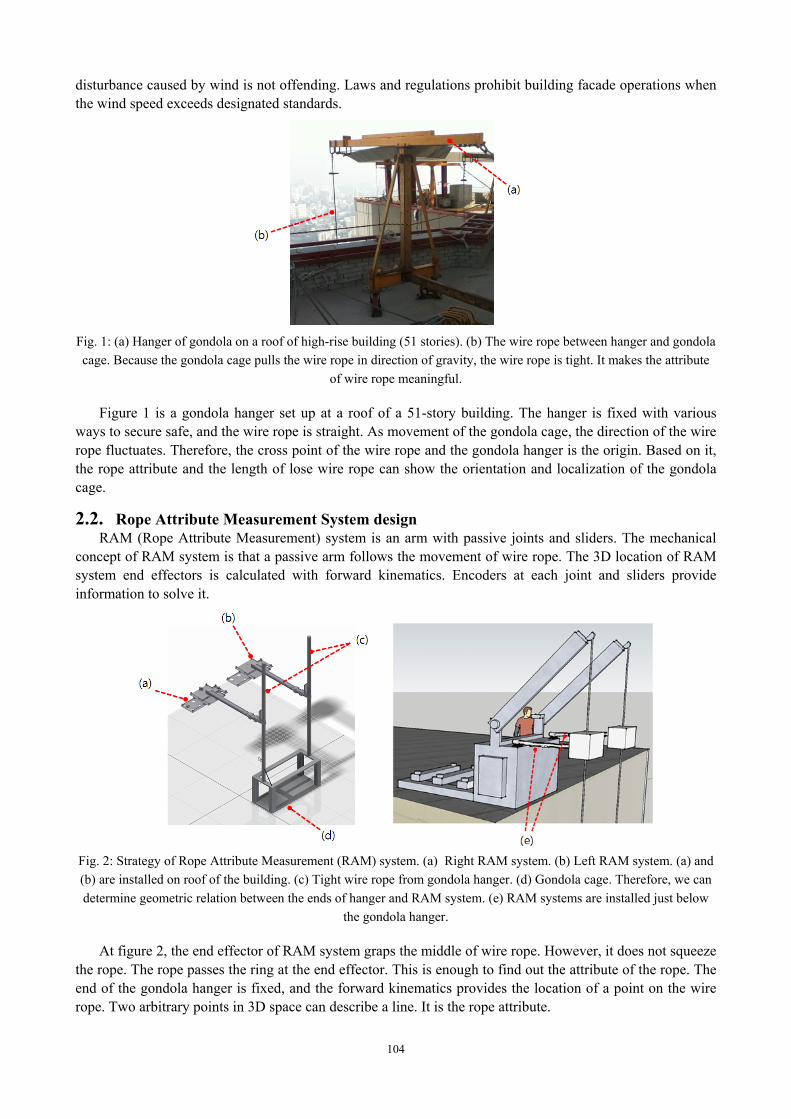
disturbance caused by wind is not offending. Laws and regulations prohibit building facade operations when the wind speed exceeds designated standards.
Fig. 1: (a) Hanger of gondola on a roof of high-rise building (51 stories). (b) The wire rope between hanger and gondola cage. Because the gondola cage pulls the wire rope in direction of gravity, the wire rope is tight. It makes the attribute
of wire rope meaningful.
Figure 1 is a gondola hanger set up at a roof of a 51-story building. The hanger is fixed with various ways to secure safe, and the wire rope is straight. As movement of the gondola cage, the direction of the wire rope fluctuates. Therefore, the cross point of the wire rope and the gondola hanger is the origin. Based on it, the rope attribute and the length of lose wire rope can show the orientation and localization of the gondola cage.
2.2. Rope Attribute Measurement System design RAM (Rope Attribute Measurement) system is an arm with passive joints and sliders. The mechanical
concept of RAM system is that a passive arm follows the movement of wire rope. The 3D location of RAM system end effectors is calculated with forward kinematics. Encoders at each joint and sliders provide information to solve it.
Fig. 2: Strategy of Rope Attribute Measurement (RAM) system. (a) Right RAM system. (b) Left RAM system. (a) and (b) are installed on roof of the building. (c) Tight wire rope from gondola hanger. (d) Gondola cage. Therefore, we can determine geometric relation between the ends of hanger and RAM system. (e) RAM systems are installed just below
the gondola hanger.
At figure 2, the end effector of RAM system graps the middle of wire rope. However, it does not squeeze the rope. The rope passes the ring at the end effector. This is enough to find out the attribute of the rope. The end of the gondola hanger is fixed, and the forward kinematics provides the location of a point on the wire rope. Two arbitrary points in 3D space can describe a line. It is the rope attribute.
104

Fig. 3: Mechanism of RAM system. (a) Entire parts of RAM system. (b) Slider on building roof with two DoF (Degree
of freedom). (c) Arm holding wire rope with three DoF. (d) Plate for 2D barcode for vision sensor.
Figure 3 is the mechanical components of RAM system. It consists of 2 DoF (Degree of Freedom) slider and 3 DoF passive joint arm. With 5 DoF, the RAM system can follow the movement of the wire rope without any disturbance.
Fig. 4: Five DoF (Degree of Freedom) of RAM system. (a) Basic posture. (b) Movement of first passive joint. This joint follows the movement on z-axis. (c) Movement of second passive joint. This joint follows the movement on xy-plane. (d) Third passive joint measures rotation on main shaft axis of RAM system. (e) Upper slider follows translation that is perpendicular to main shaft axis. (f) Lower slider detects translation along main shaft axis. (g) Encoder of upper slider
perceives translation with belt.
Figure 4 details the 5 DoF of the RAM system. These DoF are measured with encoders. The translation of sliders is converted to rotary movement by belt system. The encoder values provide the amount of translation with simple conversion.
3. Experiments and Results
Fig. 5: Nomination of DoF (Degree of Freedom) and link length. A1, A2, A3, and A4 are link lengths. θ1, θ2, and θ3 are rotations of passive angles. D1, and D2 are amounts of translation from the central point. (a) The central point of slider.
(b) The reference point of A1 link. The translations are measured through the difference of (a) and (b) on x-y plane.
105

Figure 5 nominates the elements of forward kinematics. Note that the encoder values of sliders are converted to translation amounts. Then, they are put at following equation.
(1)Note that c1 is the cosine function, and s1 is the sine function for brief expression. The input according to i is described at following table. Therefore, the total transform is
(2)
0T1 1T2 2T3 3T4 4T5 5T6 6T7 7T8 8T9 9T10
θi 0 0 0 θ1 0 0 0 π/2 0 0 di D1 0 A1 0 A2 0 A3 0 0 A4 ai 0 D2 0 0 0 0 0 0 0 0 αi 0 0 0 0 0 θ2 0 0 θ3 0
Table 1: Input for forward kinematics.
After table 1 is applied to eq (2), Ttotal is
(3)
Eq (3) is the total transformation of the RAM system. Following table is some outputs of real data. Ex, Ey , and Ez are the 3D location of RAM system end effector. No. D1 D2
θ 1
θ
2
θ
3 Ex Ey Ez
1 -55.69 70.31 0.21 0.20 0.18 -54.97 -1.45 1687.31 2 -70.48 70.31 0.19 0.18 0.16 -69.82 -1.31 1687.31 3 -90.09 70.26 0.21 0.20 0.18 -89.36 -1.45 1687.26 4 -95.86 64.70 0.17 0.16 0.14 -95.28 -1.16 1681.70 5 -101.76 62.61 0.21 0.20 0.18 -101.03 -1.45 1679.61
Table 2: Example of RAM System.
4.
Conclusion To automate the gondola type building facade robot, we proposed a sensor system to measure the rope
attribute. It is an arm with passive joints and sliders. The rope attribute is useful for high-rise building where sensor systems are under unfavourable condition. We can use this sensor system for fail-safe of measurement and sensor fusion.
106
5. Acknowledgement
The work presented in this paper was funded by BMRC(Building-Façade Maintenance Robot Research
Center), supported by Korea Institute of Construction and Transportation Technology Evaluation
6. References
[1] E. Gambao, M. Hernando. Control System for a Semi-automatic Façade Cleaning Robot. Proc. of the 23rd
International Symposium on Automation and Robotics in Construction. ISARC 2006, pp. 406-411.
[2] H. Zhang, J. Zhang, G. Zong, W. Wang, R. Liu. Sky Cleaner 3: a real pneumatic climbing robot for glass-wall
cleaning. Robotics & Automation Magazine, IEEE. 2006, 13 (1): 173-183.