school of engineering & technology - poornima …€¦ · · 2017-02-21detailed syllabus i...
TRANSCRIPT
Page 1Page | 1
M.Tech. (Industrial
Automation & Control)
Detailed Syllabus I Semester
Detailed Syllabus – I Semester
SCHOOL OF ENGINEERING & TECHNOLOGY
] POORNIMA UNIVERSITY
PU/2012-13/1st SEMESTER/SYLLABUS/SET/MTECH Page 2
DETAILED SYLLABUS: M. Tech. IAC
1.1 FIRST SEMESTER
1.1.1 Modern Control System Code: MT301ME101 4 Credits [LTP: 4-0-0]
A. DETAILED SYLLABUS
B. RECOMMENDED STUDY MATERIAL:
S.No Title of the Book Author 1. Modern Control Systems Dorf,Pearson 2. Control Systems Engineering Bhattacharya,Pearson 3. Systems & Control Zak,Oxford 4. Automatic Control Systems B. C. Kuo,Oxford 5 Digital Control System M-Gopal ,TMH
1.1.2 Modeling of Dynamical Systems Code: MT301ME102 4 Credits [LTP: 4-0-0]
A. DETAILED SYLLABUS
Unit Contents
State variable analysis and design: State space model for continuous time linear system and discrete time linear system. State space representation using phase variables and canonical variables, transfer function from state model, state model from transfer function, diagonalization Eigen values and eigen vector, solution of state equation. Controllability, observability and reproducibility, controllable companion transformation, interpretation of controllability, observability criteria, duality, output function controllability, input function observability. State feedback control. State feedback and output feedback, pole assignment using state feedback and output feedback, reconstructing the state from available outputs. Analysis of state equations, Control law design for full state feedback, Selection of pole locations for good design, Estimator design, Combined control law and Estimator loop transfer recovery, Integral control and robust tracking, Design of systems with pure time delay.
Unit Contents
Systems approach: Classification of inputs and models, Analytical and experimental methods of modelling: transform methods. Energy approach of modelling: Co-ordinates and velocities, Generalized co-ordinates, Degrees of freedom, The Lagrangian, Rayleigh dissipation function. Application to a simple pendulum, simple circuit, elastic pendulum, capacitor microphone, spherical elastic pendulum. Levy’s curve fitting technique: Methods based on decomposition, Levy’s basic theory, Levy’s special technique.
] POORNIMA UNIVERSITY
PU/2012-13/1st SEMESTER/SYLLABUS/SET/MTECH Page 3
B. RECOMMENDED STUDY MATERIAL:
S.No Title of the Book Author 1. Modeling and Control of Dynamic Systems Narcisco F. Macia, George J. Thaler, Thomson Learning
1.1.3 Measurement System & Error analysis Code: MT301ME103 4 Credits [LTP: 4-0-0]
A. DETAILED SYLLABUS
B. RECOMMENDED STUDY MATERIAL:
S.No Title of the Book Author 1. Electronic Instrumentation And Measurement Bell,Oxford 2. Electronic Instrumentation 3/E,Kalsi,Oxford 3. Elements Of Electronic Instrumentation And Measurement Carr,Pearson 4. Instrumentation For Engineering Measurements Dally,Pearson
Least squares method: Regression function, least squares estimator, minimum variance estimator, sequential least-squares estimation, multi-dependent variable system, and recursive estimation for increasing parameter numbers. Application of above techniques in modeling of thermal, chemical, electrical, medicalhealth, population, and agricultural systems etc
Unit Contents
Fundamental methods of measurements, concept of a generalized measurement system, types of measurements, Experimental engineering analysis. Static performance characteristics-static sensitivity, Linearity, Threshold Resolution, Hysteresis and Dead span and readability of scale. Generalized static stiffness & input and output impedances. Dynamic performance characteristics, Generalized mathematical model of measurement system, operational transfer function. Input types, order of instruments. Response of zero, first and second order instruments to step, ramp and sinusoidal inputs. Transient and frequency response. Requirements of instrument transfer function for accurate measurement. Numerical correction of dynamic data. Experimental determination of measurement system parameters. Loading effect under dynamic conditions. Accuracy and precision, types of errors, statistical analysis of data, Systematic (nonrandom) errors, Determination and minimization of systematic errors, Probability concept and distribution law, Accidental (random) errors, calculation of mean value and standard deviation from the measurements, confidence limits, conversion tables, Testing a distribution for normalcy, Propagation of error, significance test & Chi-square test, Contingency table. Model of measurement systems, Models of resistive, capacitive piezo electric, optron, Seismic and Gyroscopic pickups. Dynamic studies of models.
] POORNIMA UNIVERSITY
PU/2012-13/1st SEMESTER/SYLLABUS/SET/MTECH Page 4
1.1.4 ELECTIVE I 4 Credits [LTP: 4-0-0]
1.1.4.1 Real time System Code: MT301CS104.1 4 Credits [LTP: 4-0-0]
A. DETAILED SYLLABUS
B. RECOMMENDED STUDY MATERIAL:
S.No Title of the Book Author 1. Real Time System Design, Mc Graw Hill Levi and Agarwal 2. Real Time Systems and Programming Languages, Addison Wesley A. Burns and A. Wellings 3. Real Time Systems, Pearson Liu 4. Real Time Computer Control: An Introduction, Pearson Bennett
1.1.4.2 Electrical Sensors and Transducers Code: MT301EE104.2 4 Credits [LTP: 4-0-0]
A. DETAILED SYLLABUS
Unit Contents
Overview of Real Time Systems: Definition, Evolution, Typology, Structure and applications. Temporal modeling and specification of real time systems, State diagram, Finite automata model, Petri-net, State chart and mode chart, Q-model, Formal methods. Sequential and Logic Control: Ladder diagram, PLC programming, Case studies in interlocking and sequence control Hardware Components and Configuration of Real Time System: Interfacing systems for analog and digital I/O, Programmable logic control system architecture, Computer control system architecture, Flight control systems, Hardware-in-loop simulation systems, Distributed control architecture, Reliability enhancement by redundancy.
Real Time Operating Systems: Features, Primary components, Structured design of real time systems, Data flow oriented method of analysis and design, Mode chart oriented methods, Development, Integration and validation of real time systems, Special consideration for safety critical systems.
Unit Contents
Introduction: Differences between devices used for measurement of various parameters–sensors, transducers, probes, etc. Principle of physical and chemical transduction sensor classification-thin/thick film, active/passive, electrical/mechanical/optical etc. Static and dynamic performance characteristics of analogue and digital transducers. Specifications. Determination of sensor characteristics, characterization and calibration. Electrical Transducers: Principles design considerations for better performance characteristics output circuits and interfacing techniques and applications of following transducers. Variable resistance type–Potentiometers, strain gauges, RTD, thermistors, hotwire, anemometers. Variable inductance type–self and mutual inductance, pulse transducer. Variable capacitance transducers.
] POORNIMA UNIVERSITY
PU/2012-13/1st SEMESTER/SYLLABUS/SET/MTECH Page 5
B. RECOMMENDED STUDY MATERIAL:
S.No Title of the Book Author 1. Measurement Systems: Application and Design, Mc Graw Hill Doeblin, E.O. 2. Sensors and Transducers Patranabis,D
1.1.4.3 Signal Theory Code: MT301EC104.3 4 Credits [LTP: 4-0-0]
B. DETAILED SYLLABUS
B. RECOMMENDED STUDY MATERIAL:
S. No. Title of the Book Author 1. Principles Of Linear Systems And Signals Lathi ,2nd,Oxford 2. Signal & Systems 3e,Chen 3rd,Oxford 3. Fundamentals Of Signals And Systems M.J. Roberts ,Wiley 4. Signals And Systems P Rao,TMH
Special Transducers: Semiconductor temperature sensors thermo-electric sensors, piezoelectric sensors magnetostrictive sensors polymer like polypyrrole smart sensors. Electromechanical Transducers, Electrodynamic, eddy current, force balance transducers. Basics of MEMs devices. Power System Transducers: Analogue and digital transducers for measurement of voltage current ,power factor, frequency, power –active and reactive.RTU for tariff calculation. Analogue Signal Conditioning techniques: Bridge amplifier, carrier amplifiers, charge amplifiers and impedance converters, modulation-demodulation , dynamic compensation linearization multiplexing and demultiplexing. Digital Interfacing techniques: Digital interfacing techniques. Interfaces, processors, code converters, linearizers. Signal Transmission: Transmitters, V-I and V-f converters. Single transmission. Cable transmission of analog and digital signal, fibre optic signal transmission, radio, telemetry, pneumatic transmission. Signal Display/Recording systems: Signal Display/Recording systems. Graphic display systems, storage oscilloscope recorders-ink, thermal, UV, Data loggers.
Unit Contents
Representation of deterministic signals: Orthogonal representation of signals. Dimensionality of signal spaces. Construction of orthogonal basis functions. Random Processes: Definition and classification, stochastic integrals, Fourier transforms of random processes, stationary and non-stationary processes, correlation functions. Ergodicity, power spectral density, transformations of random processes by linear systems. Representation of random processes (via sampling, K-L expansion and narrow band representations), special random processes: white Gaussian noise, Wiener-Levy process, Poisson process, shot-noise process, Markov process. Optimum Filtering: Matched filters for deterministic signals in white and colored Gaussian noise. Wiener filters for random signals in white and colored Gaussian noise
] POORNIMA UNIVERSITY
PU/2012-13/1st SEMESTER/SYLLABUS/SET/MTECH Page 6
1.1.5 Lab 1 Code: MT301EE205 2 Credits [LTP: 0-0-2]
A. DETAILED SYLLABUS
1.1.6 SEMINAR 1 Code: MT301ME406 2 Credits [LTP: 2-0-0]
A. DETAILED SYLLABUS
Unit Contents
Minimum 3-4 four experiments to be performed in each subject compulsory as well as Electives.
Unit Contents
Students will be grouped in two to three, will have to decide final thesis area, download research papers from IEEE, ACM, Elsevier, Springer etc. Summarizing paper – Reading abstracts and finding ideas, conclusion, Advantages of Their approach, the drawbacks of the papers. Generalize results from a research paper to related research problems. Comparing the approach - Identify weaknesses and strengths in recent research articles in the subject. Practice sessions on how to read, analyze and summarize research papers. Students in group will have to deliver seminar, prepare a report and a review paper based on analysis.

Page 1Page | 1
M.Tech. (Industrial
Automation & Control)
Detailed Syllabus II Semester
Detailed Syllabus – II Semester
SCHOOL OF ENGINEERING & TECHNOLOGY

] POORNIMA UNIVERSITY
PU/2012-13/2nd SEMESTER/SYLLABUS/SET/MTECH Page 2
DETAILED SYLLABUS: M. Tech. IAC
1.1 SECOND SEMESTER
1.1.1 Industrial Automation Code: MT302ME101 4 Credits [LTP: 4-0-0]
A. DETAILED SYLLABUS
Unit Contents
Introduction Processes; Classification of Control system; Open loop and Closed loop system; elements used in feedback control system; control loop study, samples of disturbances, control actions. Basic control schemes and controllers On – off Control; Time proportional control; PI Control; PD Control; PID Control. Controller: Block diagram; Types of controllers; Self operated controllers; Electronic controller; Analog controller; Pneumatic controller; comparison between Pneumatic & Electronic controller; Hydraulic Controller; Programmable Logic Controller (PLC). Complex Control Ratio Control: Objectives; Applications; Implementation methods; Loop Diagram; Furnace Air / fuel ratio control system; Important role of ratio control system Cascade Control: Objectives; key features for cascade control to be successful; advantage of Cascade Control system; Block diagram description; Transfer function. Design of Cascade Control System in shell and tube heat exchanger and Continuous Stirred Tank Reactor (CSTR) Feed forward Control: Distinguished between feedback; Cascade and feed forward Control System; Objectives : loop diagram; Analysis of combine Feedback and feed forward control in a boiler drum level, Shell tube heat exchanger etc., Block Diagram Description; Mathematical Details of the algorithm. Control Inverse Derivative Control Controller Tuning, Selective Control; Process example. Overwrite control: Objectives; Loop diagram description; Design and Analysis of overwrite control system of a shell and tube heat exchanger; flow control in a pumping system for a sand water slurry. Split range control: Computer Control Direct Digital Control (DDC), Distributed Control Systems (DCS): SCADA System; PLC System : Architecture; Systematic approach in designing a process control system, I/O Devices in a PLC; Powering Field Devices in a PLC; PLC input / output types; Sourcing and sinking concept; PLC connections with process control system;. Adaptive Control Self adaptive, predictive, Self tuning. Process Control System Boiler Control Steel Plant Instrumentation / Control System, control in Paper Industry, materials balances diagram; steady state materials balances; pressure control; level control; selection of appropriate distillation column strategy; composition control.
] POORNIMA UNIVERSITY
PU/2012-13/2nd SEMESTER/SYLLABUS/SET/MTECH Page 3
B. RECOMMENDED STUDY MATERIAL:
S. No Title of the Book Author 1. Instrument Engineers Hand book Process control and optimization Bela G. Liptak , CRC Press
2. Process/industrial instruments and controls handbook Douglas M. Considine, TMH
1.1.2 Research Methodology Code: MT302CS102 4 Credits [LTP: 4-0-0]
A. DETAILED SYLLABUS
B. RECOMMENDED STUDY MATERIAL:
S.No Title of the Book Author 1. Research Methodology R. Panneerselvam, PHI 2. Research Methodology: Methods and Trends Dr. C. R. Kothari 3. Research Methodology: A Step by Step Guide for Beginners Ranjit Kumar
Unit Contents 1. Overview of Research Methodology
Introduction, Mathematical tools for analysis, Research problems in management, Types of research, Research Process
2. Data Collection & Presentation Introduction, Primary data, Secondary data, Data Presentation
3. Review of Basic Statistical Measures Introduction, Measures of Central Tendencies, Measures of Variation, Measures of Skewness
4. Design and Analysis of Experiments
Introduction, Analysis of Variance, Completely Randomized design, Randomized complete block design, Latin square design, Duncan’s multiple Range Test, Functional design, second factorial experiment, Expected Mean Square.
5. Basic Multivariate Analysis Introduction, Correlation analysis, Forecasting, Linear regression & Time series
6. Algorithmic Research Introduction, Algorithmic Research Problems, Types,Types of Solution Procedures, Steps of development,
Steps of Algorithmic Research, Designof Experiments, Meta Heuristics for Combinational Problems. 7. Simulation Introduction, Need for simulation, Types, Simulation Languages, case study. 8. Report Writing and Presentation Introduction, Types of report, Guidelines for review draft, Report format, Typing Instructions, Oral
Presentations

] POORNIMA UNIVERSITY
PU/2012-13/2nd SEMESTER/SYLLABUS/SET/MTECH Page 4
1.1.3 ELECTIVE II 4 Credits [LTP: 4-0-0]
1.1.3.1 Advance soft computing techniques Code: MT302ME103.1 4 Credits [LTP: 4-0-0]
A. DETAILED SYLLABUS
B. RECOMMENDED STUDY MATERIAL:
S.No Title of the Book Author 1. Rough set data analysis: A Road to Non-invasive Knowledge
Discovery, Methodos Publishers Duntsch,I and Gediga, G.
2. Fuzzy Sets and Fuzzy Logic, Theory and Applications, PrenticeHall of India Private Limited Klir, G. J., Yuan, Bo
3. Fuzzy Logic with Engineering Applications, Wiley Ross, T.J.
1.1.3.2 Advanced Computer concepts for Automation Code: MT302ME103.2 4 Credits [LTP: 4-0-0]
A. DETAILED SYLLABUS
Unit Contents
Introduction to Soft Computing: Review of AI techniques and soft computing techniques & their applications in instrumentation engineering. Multiobjective optimization: Comparison with single objective optimization, Dominance ,Non Dominated shorting, Multiobjective optimization using GA. Advanced AI Techniques: Swarm Intelligence (SI), Particle swarm optimization (PSO), Ant-Colony Optimization, Petrinets, Coloured-Petrinets, Entropy , Multi-agent and Hierarchical applications of advanced AI techbniques in Control/ Signal processing/ Robotics. Rough Set Theory: Introduction, Information system, Indiscernibility, Rough sets, Rough set theory, Set approximation, Rough membership, Attributes, Dependency of attributes, Rough equivalence, Reducts, Rough Reducts based on SVM, Hybrid set systems Fuzzy rough sets, Topological structures of rough sets over fuzzy lattices, Fuzzy reasoning based on universal logic Granular Computing: Soft sets to information systems, Uses and applications of granular computing in instrumentation engineering. Hybrid AI Techniques: Introduction to Hybrid AI systems : Neuro- Fuzzy, Fuzzy-rough set systems, Neuro-Fuzzy-GA systems and case studies around Hybrid systems.
Unit Contents
Introduction: Computer Automation, Elements of Automation, and Types of Automation, Importance of Computers in Automation, Computer Networks and Topology Types. Computer Graphics, VDU Basics, Components, Display Adapters, Video Display Modes. Object Oriented Programming Introduction: Necessity of Object Oriented Programming, Procedural Language and Object Oriented Approach, Characteristics of Object Oriented Languages. OOP’s Concept: Objects, Classes, Inheritance, Overloading, Virtual Functions, and Polymorphism OOP’s feature for Automation: Templates and Exceptions, C++ Input and output concepts, OOPS for Automation. Introduction to JAVA, Features of JAVA, OOPS through JAVA.
] POORNIMA UNIVERSITY
PU/2012-13/2nd SEMESTER/SYLLABUS/SET/MTECH Page 5
B. RECOMMENDED STUDY MATERIAL:
S.No Title of the Book Author 1. C++ Programming Bjarne Stroustrup, Addison Wesley 2. Fundamentals of DBMS Ramez Elmasri and Navathe, Addison Wesley 3. Operating System Concepts Silberschatz, Galvin, Gagne, Sixth edition, John Wiley
1.1.3.3 Artificial Intelligence & Expert System in Automation Code: MT302ME103.3 4 Credits [LTP: 4-0-0]
A. DETAILED SYLLABUS
B. RECOMMENDED STUDY MATERIAL:
S.No Title of the Book Author 1. Introduction to Artificial Intelligence and Expert Systems DAN.W.Patterson, PHI/Pearson 2. Artificial Intelligence, Fourth Edition George.F.Luger, Pearson Education, Asia. 3. Artificial Intelligence: An Engineering Approach Robert J. Schalkeff, PHI/Pearson 4. A Guide to Expert Systems Donald A Waterman, Addison Wesley/Pearson
Database Management System Introduction: Comparison of File System, Database Management System, Characteristic Features of Database Management Systems. Database Design: Relational Databases, Logical Database Design, Data Base Models, DBMS Languages and Interfaces. Data Base Security and Authorization. Data Ware House. Operating Systems and Protocols: Basic Concepts of Batch Systems, Multi Programming, Time-Sharing, Distributed and Real Time Systems. Operating System Structures: Operating System Components and Services & brief discussion about protocols-FTP, TCP/IP & HTTP.
Unit Contents
Artificial Intelligence: Overview of Artificial Intelligence, The Importance, Early Work and Related Fields. Artificial Intelligence in CAD, Application of Artificial Intelligence in Design, Scope and History of AI. The AI Problems, Task Domains of AI, AI Techniques. Application of AI in Matching, Pattern Recognition. AI Components, Languages and Strategies: Definition and Importance of Knowledge, Components of Knowledge, Knowledge Based System, Knowledge representation, Organization, Manipulation and Acquisition. Strategies for Knowledge Acquisition, Knowledge Representation Languages, Issues in Knowledge Representation. A Network Representation Language. Introduction to LISP, Syntax and Numeric Functions, Search Strategies in LISP, Recursive Unification, Function Interpreters and Embedded Languages. Logic Programming in LISP. Streams and Delayed Evaluation. Object Oriented Representation. An Expert System Shell in LISP. Automated Reasoning: The General Problem Solver and Difference Tables. Resolution Theorem Proving. Machine Learning. Perceptron Learning, Back Propagation Learning, Competitive Learning. The Genetic Algorithm: The Genetic Programming. Artificial Life and Society Based Learning. Knowledge Based Design Aids: Inference Process, Backward Chaining, Forward Chaining, Hybrid Chaining. Feature Based Modeling, Feature Recognition, Design by Features. Application of Feature Based Models: Role of AI in Manufacturing. Fuzzy Logic and Neural Networks. Expert System Architecture: Rule based System Architectures, Non Production System Architectures, Dealing with Uncertainty, Knowledge System Building tools, Expert Systems Architecture, Structure of an Expert System, Building an Expert System, Representing and using Domain Knowledge. Expert System Shells.
] POORNIMA UNIVERSITY
PU/2012-13/2nd SEMESTER/SYLLABUS/SET/MTECH Page 6
1.1.3.4 Intelligent control techniques and application Code: MT302ME103.4 4 Credits [LTP: 4-0-0]
A. DETAILED SYLLABUS
B. RECOMMENDED STUDY MATERIAL:
S.No Title of the Book Author 1. Artificial Neural Networks, PrenticeHall of India Narayana, Y. 2. Artificial intelligence, McGraw Hill Rich, E., and Knight, K. 3. Fuzzy Logic with Engineering Applications, John Wiley Ross, J. T. 4. Neural Networks, Fuzzy Logic And Genetic Algorithm: Synthesis
And Applications S. Rajasekaran, G. A. Vijayalakshmi Pai, PHI
1.1.4 ELECTIVE III 4 Credits [LTP: 4-0-0]
1.1.4.1 Advance embedded system Code: MT302ME104.1 4 Credits [LTP: 4-0-0]
A. DETAILED SYLLABUS
Unit Contents
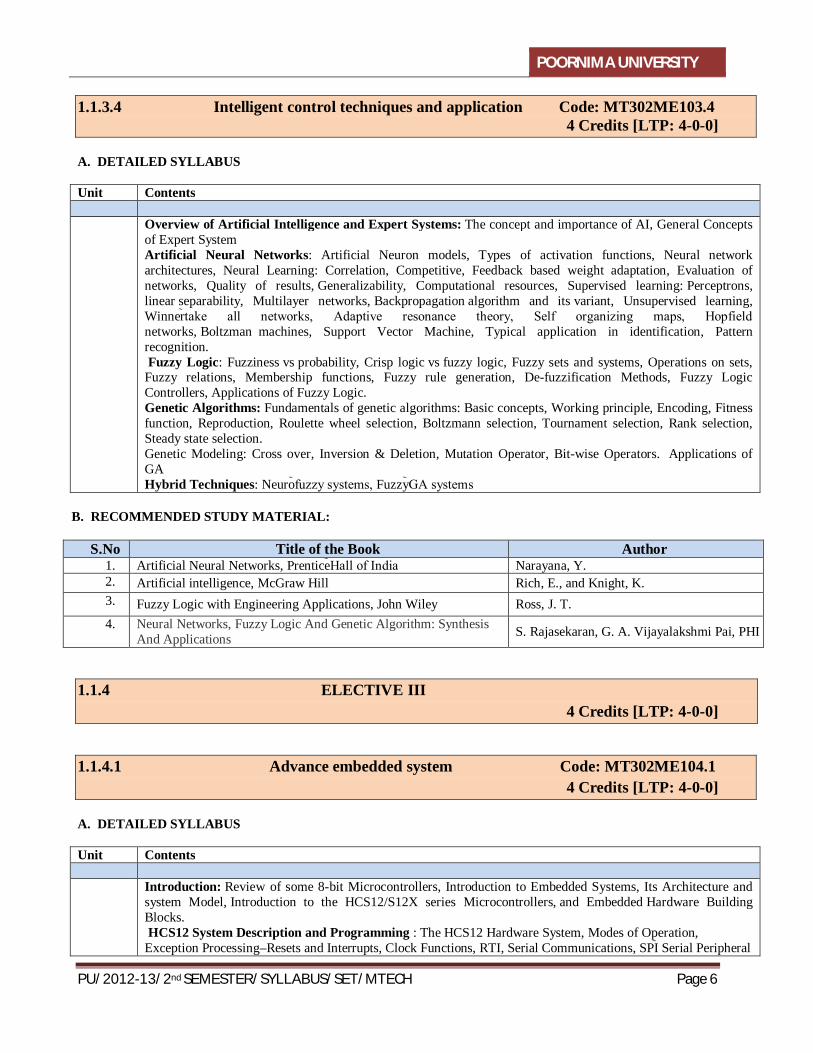
Overview of Artificial Intelligence and Expert Systems: The concept and importance of AI, General Concepts of Expert System Artificial Neural Networks: Artificial Neuron models, Types of activation functions, Neural network architectures, Neural Learning: Correlation, Competitive, Feedback based weight adaptation, Evaluation of networks, Quality of results, Generalizability, Computational resources, Supervised learning: Perceptrons, linear separability, Multilayer networks, Backpropagation algorithm and its variant, Unsupervised learning, Winner take all networks, Adaptive resonance theory, Self organizing maps, Hopfield networks, Boltzman machines, Support Vector Machine, Typical application in identification, Pattern recognition. Fuzzy Logic: Fuzziness vs probability, Crisp logic vs fuzzy logic, Fuzzy sets and systems, Operations on sets, Fuzzy relations, Membership functions, Fuzzy rule generation, De-fuzzification Methods, Fuzzy Logic Controllers, Applications of Fuzzy Logic. Genetic Algorithms: Fundamentals of genetic algorithms: Basic concepts, Working principle, Encoding, Fitness function, Reproduction, Roulette wheel selection, Boltzmann selection, Tournament selection, Rank selection, Steady state selection. Genetic Modeling: Cross over, Inversion & Deletion, Mutation Operator, Bit-wise Operators. Applications of GA Hybrid Techniques: Neurofuzzy systems, FuzzyGA systems
Unit Contents
Introduction: Review of some 8-bit Microcontrollers, Introduction to Embedded Systems, Its Architecture and system Model, Introduction to the HCS12/S12X series Microcontrollers, and Embedded Hardware Building Blocks. HCS12 System Description and Programming : The HCS12 Hardware System, Modes of Operation, Exception Processing–Resets and Interrupts, Clock Functions, RTI, Serial Communications, SPI Serial Peripheral

] POORNIMA UNIVERSITY
PU/2012-13/2nd SEMESTER/SYLLABUS/SET/MTECH Page 7
B. RECOMMENDED STUDY MATERIAL:
S.No Title of the Book Author 1. Embedded Systems, Dorling Kingsley Barrett, S.F. and Pack, J.D. 2. Assembly and C programming for HCS12 Microcontrollers, Oxford
University Fredrick, M.C.
3. The HCS12 / 9S12: An Introduction to Software and Hardware Interfacing, Cengage Learning Haung, H.W.
4. Advance Microprocessors and Peripherals – Architecture, Programming and Interfacing, Tata McGrawHill Ray, A.K.
1.1.4.2 Biometric techniques Code: MT302ME104.2 4 Credits [LTP: 4-0-0]
A. DETAILED SYLLABUS
B. RECOMMENDED STUDY MATERIAL:
S.No Title of the Book Author 1. Biometrics for Network Security, Dorling Kingsley Reid, P. 2. Biometrics, McGraw Hill Woodward, J.D. and Orlans, Nicholos M.
1.1.4.3 Industrial instrumentation and control Code: MT302ME104.3
Interface, HCS12 Analog-to-Digital Conversion System. Basic Interfacing Concepts: Interfacing to Keypad, Motors, LCDs, The RS232 Interface and their Examples. Networking and Connectivity: Introduction to various networking techniques, Controller Area Network (CAN), IrDA, Bluetooth, Zigbee, Description of their protocols and applications in Sensor. Development and Programming Tools: Hardware and Software development tools, C language programming, Dedicated Tools like Code-warior tools: Project IDE, Compiler, Assembler and Debugger, JTAG and Hardware Debuggers. Real-time Operating Systems: Basic concepts of RTOS and its types, Concurrency, Reentrancy, Intertask communication, Implementation of RTOS with some case studies. Laboratory Work: Various programming examples on HCS12 core, Interfacing of LCD, Motor, Keypad, ADC, and RS232. Case study of Embedded system around HCS12.
Unit Contents
Introduction: Benefits of biometrics, Verification and identification: Basic working of biometric matching, Accuracy, False match rate, False non-match rate, Failure to enroll rate, Active and passive biometric, Parameters of a good biometrics Finger Biometric Technology: General description of fingerprints, Micro and Macro Features , Types of algorithms used for interpretation, Components and Operations: Strength and weakness. Facial Biometric Technology: General description, Features , Types of algorithms used for interpretation, Components and Operations, Strength and weakness. Iris Biometric Technology: General description, Features , Types of algorithms used for interpretation, Components and Operations, Strength and weakness. Voice Biometric Technology: General description, Features , Types of algorithms used for interpretation, Components and Operations , Strength and weakness. Other Physiological Biometrics: Hand scan , Retina scan, Behavioral Biometrics: Signature scan, keystroke scan etc. Applications of biometrics.
] POORNIMA UNIVERSITY
PU/2012-13/2nd SEMESTER/SYLLABUS/SET/MTECH Page 8
4 Credits [LTP: 4-0-0]
A. DETAILED SYLLABUS
B. RECOMMENDED STUDY MATERIAL:
S.No Title of the Book Author 1. Electronic Instruments and Instrumentation technology, PHI Anand, M.M.S. 2. Robotics technology and flexible automation, Tata McGraw Hill Deb S. 3. Measurement systems: applications and design, Tata McGraw Hill Doeblin E.O. 4. Process control: Instrument engineers Handbook, Butterwirth Heinemann Liptak B.G.
1.1.4.4 Process Instrumentation and Control Code: MT302ME104.4
4 Credits [LTP: 4-0-0]
A. DETAILED SYLLABUS
Unit Contents
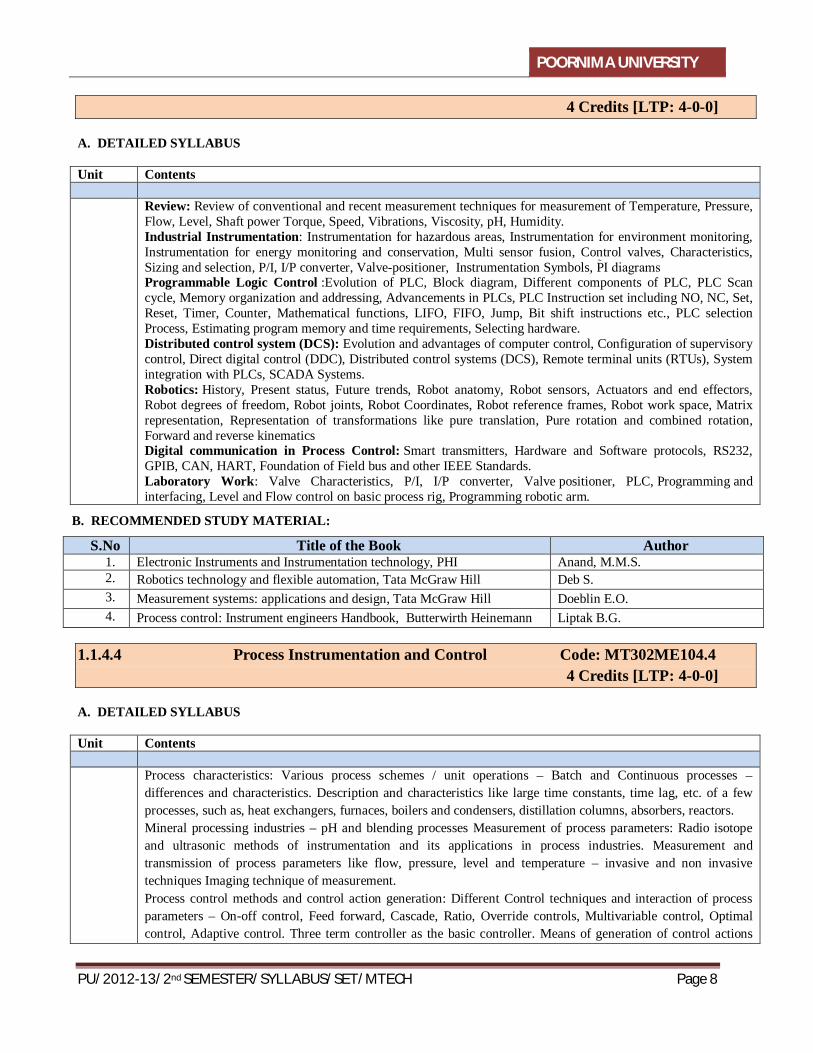
Review: Review of conventional and recent measurement techniques for measurement of Temperature, Pressure, Flow, Level, Shaft power Torque, Speed, Vibrations, Viscosity, pH, Humidity. Industrial Instrumentation: Instrumentation for hazardous areas, Instrumentation for environment monitoring, Instrumentation for energy monitoring and conservation, Multi sensor fusion, Control valves, Characteristics, Sizing and selection, P/I, I/P converter, Valve-positioner, Instrumentation Symbols, PI diagrams Programmable Logic Control :Evolution of PLC, Block diagram, Different components of PLC, PLC Scan cycle, Memory organization and addressing, Advancements in PLCs, PLC Instruction set including NO, NC, Set, Reset, Timer, Counter, Mathematical functions, LIFO, FIFO, Jump, Bit shift instructions etc., PLC selection Process, Estimating program memory and time requirements, Selecting hardware. Distributed control system (DCS): Evolution and advantages of computer control, Configuration of supervisory control, Direct digital control (DDC), Distributed control systems (DCS), Remote terminal units (RTUs), System integration with PLCs, SCADA Systems. Robotics: History, Present status, Future trends, Robot anatomy, Robot sensors, Actuators and end effectors, Robot degrees of freedom, Robot joints, Robot Coordinates, Robot reference frames, Robot work space, Matrix representation, Representation of transformations like pure translation, Pure rotation and combined rotation, Forward and reverse kinematics Digital communication in Process Control: Smart transmitters, Hardware and Software protocols, RS232, GPIB, CAN, HART, Foundation of Field bus and other IEEE Standards. Laboratory Work: Valve Characteristics, P/I, I/P converter, Valve positioner, PLC, Programming and interfacing, Level and Flow control on basic process rig, Programming robotic arm.
Unit Contents
Process characteristics: Various process schemes / unit operations – Batch and Continuous processes – differences and characteristics. Description and characteristics like large time constants, time lag, etc. of a few processes, such as, heat exchangers, furnaces, boilers and condensers, distillation columns, absorbers, reactors. Mineral processing industries – pH and blending processes Measurement of process parameters: Radio isotope and ultrasonic methods of instrumentation and its applications in process industries. Measurement and transmission of process parameters like flow, pressure, level and temperature – invasive and non invasive techniques Imaging technique of measurement. Process control methods and control action generation: Different Control techniques and interaction of process parameters – On-off control, Feed forward, Cascade, Ratio, Override controls, Multivariable control, Optimal control, Adaptive control. Three term controller as the basic controller. Means of generation of control actions
] POORNIMA UNIVERSITY
PU/2012-13/2nd SEMESTER/SYLLABUS/SET/MTECH Page 9
B. RECOMMENDED STUDY MATERIAL:
S.No Title of the Book Author 1. Process Control. TMH Harriot 2. D. Principles of Process Control. TMH Patranabis 3. Process System Analysis and Control. Mc Graw Hill Coughnower and Koppel 4. Digital Computer Process Control. Intext Education Publishers Smith, L. 5. Digital Control of Dynamic Systems. 3rd Edition. Pearson Franklin
1.1.5 Lab 2 Code: MT302EC205 2 Credits [LTP: 0-0-2]
A. DETAILED SYLLABUS
1.1.6 SEMINAR II Code: MT302ME406
2 Credits [LTP: 2-0-0]
A. DETAILED SYLLABUS
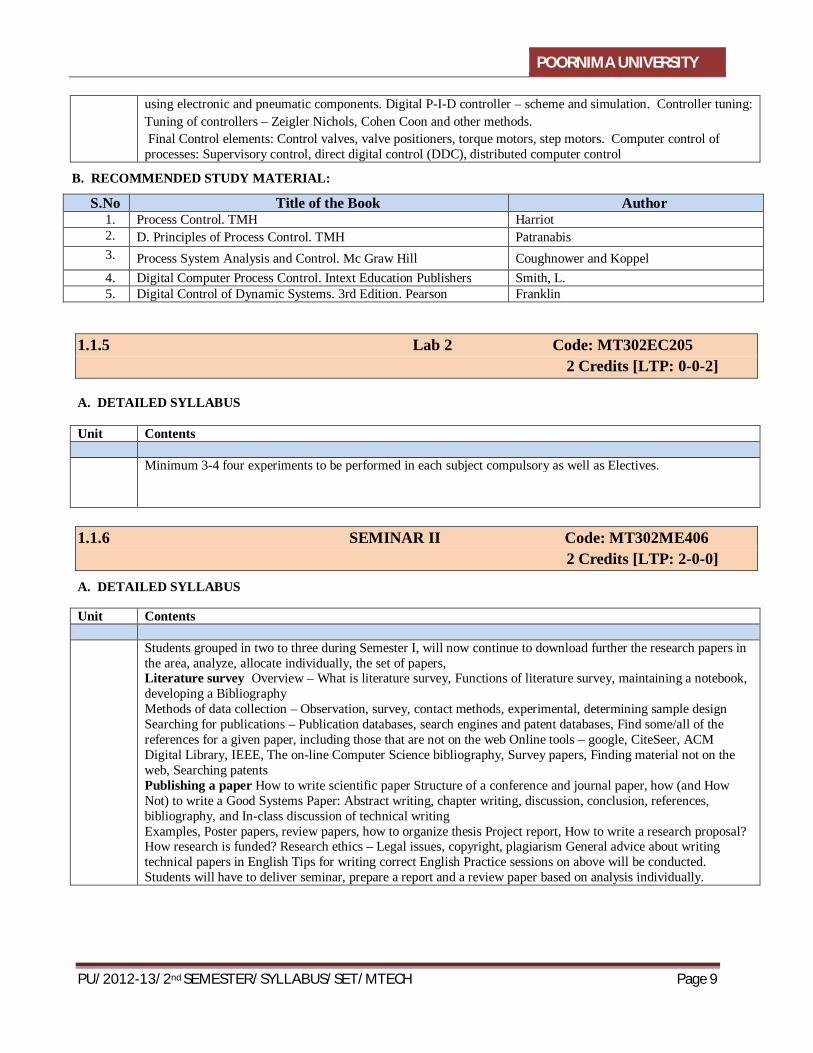
using electronic and pneumatic components. Digital P-I-D controller – scheme and simulation. Controller tuning: Tuning of controllers – Zeigler Nichols, Cohen Coon and other methods. Final Control elements: Control valves, valve positioners, torque motors, step motors. Computer control of processes: Supervisory control, direct digital control (DDC), distributed computer control
Unit Contents
Minimum 3-4 four experiments to be performed in each subject compulsory as well as Electives.
Unit Contents
Students grouped in two to three during Semester I, will now continue to download further the research papers in the area, analyze, allocate individually, the set of papers, Literature survey Overview – What is literature survey, Functions of literature survey, maintaining a notebook, developing a Bibliography Methods of data collection – Observation, survey, contact methods, experimental, determining sample design Searching for publications – Publication databases, search engines and patent databases, Find some/all of the references for a given paper, including those that are not on the web Online tools – google, CiteSeer, ACM Digital Library, IEEE, The on-line Computer Science bibliography, Survey papers, Finding material not on the web, Searching patents Publishing a paper How to write scientific paper Structure of a conference and journal paper, how (and How Not) to write a Good Systems Paper: Abstract writing, chapter writing, discussion, conclusion, references, bibliography, and In-class discussion of technical writing Examples, Poster papers, review papers, how to organize thesis Project report, How to write a research proposal? How research is funded? Research ethics – Legal issues, copyright, plagiarism General advice about writing technical papers in English Tips for writing correct English Practice sessions on above will be conducted. Students will have to deliver seminar, prepare a report and a review paper based on analysis individually.
Page 1Page | 1
M.Tech. (Industrial
Automation & Control)
Detailed Syllabus II Semester
Detailed Syllabus – II Semester
SCHOOL OF ENGINEERING & TECHNOLOGY
] POORNIMA UNIVERSITY
PU/2012-14/3rd SEMESTER/SYLLABUS/SET/MTECH/IAC Page 2
M. Tech. INDUSTRIAL AUTOMATION & CONTROL (IAC) Syllabus – Third Semester
1.1 Virtual Instrumentation Code: MIA03101 4 Credits [LTP: 4-0-0]
A. DETAILED SYLLABUS
B. RECOMMENDED STUDY MATERIAL:
S.No Title of the Book Author 1. LABVIEW Graphical Programming, McGraw Hill Gary Johnson 2. Virtual Instrumentation Using Lab View, Tata McGraw Hill Gupta 3. PC Interfacing for Data Acquisition and Process Control, ISA S. Gupta, J.P. Gupta 4. Virtual Instrumentation using LabVIEW, TMH Sanjay Gupta and Joseph John
1.2 ROBOTIC TECHNOLOGY Code: MIA03102 4 Credits [LTP: 4-0-0]
A. DETAILED SYLLABUS
Unit Contents
Virtual Instrumentation: Historical perspective, advantages, blocks diagram and architecture of a virtual instrument, data-flow techniques, graphical programming in data flow, comparison with conventional programming. VI programming techniques: VIS and sub-VIS, loops and charts, arrays, clusters and graphs, case and sequence structures, formula nodes, local and global variables, string and file I/O, Instrument Drivers, Publishing measurement data in the web. Data acquisition basics: Introduction to data acquisition on PC, Sampling fundamentals, Input/Output techniques and buses. ADC, DAC, Digital I/O, counters and timers, DMA, Software and hardware installation, Calibration, Resolution, Data acquisition interface requirements. VI Chassis requirements. Common Instrument Interfaces: Current loop, RS 232C/ RS485, GPIB. Bus Interfaces: USB, PCMCIA, VXI, SCSI, PCI, PXI, Firewire. PXI system controllers, Ethernet control of PXI. Networking basics for office & Industrial applications, VISA and IVI. VI toolsets, Distributed I/O modules. Application of Virtual Instrumentation: Instrument Control, Development of process database management system, Simulation of systems using VI, Development of Control system, Industrial Communication, Image acquisition and processing, Motion control.
Unit Contents
Fundamentals: historical information, robot components, Robot characteristics, Robot anatomy, Basic structure of robots, Resolution, Accuracy and repeatability Robot Kinematics : Position Analysis forward and inverse kinematics of robots, Including frame representations, Transformations, position and orientation analysis and the DenavitHartenberg representation of robot kinematics, The manipulators, The wrist motion and grippers.
] POORNIMA UNIVERSITY
PU/2012-14/3rd SEMESTER/SYLLABUS/SET/MTECH/IAC Page 3
B. RECOMMENDED STUDY MATERIAL:
S.No Title of the Book Author 1. Robotics Control Sensing, Vision and Intelligence, McGraw Hill Gonzalez, R. C., Fu, K. S. and Lee, C.S.G. 2. Robotics for Engineers, McGraw Hill Koren,Y. 3. Introduction to Robotics, Analysis, Systems, Applications, Dorling
Kingsley, Dorling Kingsley Niku, S.B.
4. Programming robot controllers, McGraw Hill Predko, M.
1.3 ELECTIVE V 4 Credits [LTP: 4-0-0]
1.3.1 Environment Monitoring Instrumentation Code: MIA03103 4 Credits [LTP: 4-0-0]
A. DETAILED SYLLABUS
Differential motions, Inverse Manipulator Kinematics: Differential motions and velocity analysis of robots and frames. Robot Dynamic Analysis and Forces: Analysis of robot dynamics and forces, Lagrangian mechanics is used as the primary method of analysis and development. Trajectory Planning: Methods of path and trajectory planning, Both in jointspace and in Cartesianspace. Actuators and Sensors: Actuators, including hydraulic devices, Electric motors such as DC servomotors and stepper motors, Pneumatic devices, as well as many other novel actuators, It also covers microprocessor control of these actuators, Mechatronics, Tactile sensors, Proximity and range sensors, Force and torque sensors, Uses of sensors in robotics Robot Programming, Systems and Applications: Robot languages, Method of robots programming, Lead through programming methods, A robot programs as a path in space, Motion interpolation, WAIT, SIGNAL and DELAY commands, Branching capabilities and limitation of lead through methods and robotic applications. Fuzzy Logic Control: Basic principles of fuzzy logic and its applications in microprocessor control and robotics.
Unit Contents
Air Pollution: Impact of man of the environment: An overview, Air pollution sources and effects, Metrological aspect of air pollutant dispersion, Air pollution sampling and measurement, Air pollution control methods and equipment, Air sampling techniques, Gas analyzer, Gas chromatography, Control of specific gaseous pollutants, Measurement of automobile pollution, Smoke level meter, CO/HC analyzer. Water pollution: Sources And classification of water pollution, Waste water sampling and analysis, Waste water sampling techniques and analyzers, Gravimetric, Volumetric, Calometric, Potentiometer, Flame photometry, Atomic absorption spectroscopy, Ion chromatography, Instruments used in waste water treatment and control, Solid waste management techniques.

] POORNIMA UNIVERSITY
PU/2012-14/3rd SEMESTER/SYLLABUS/SET/MTECH/IAC Page 4
B. RECOMMENDED STUDY MATERIAL:
S.No Title of the Book Author 1. Environmental Pollution Control, New Age International Rao. C.S. 2. A Text Book in Environmental Pollution and control, Galgotia Publication Bhatai, H.S. 3. Environmental Engineering and Management, S.K Kataria Dhameja, S.K. 4. Air Pollution, Tata McGraw Hill Rao, M.N. and Rao, H.V.
1.3.2 Remote Sensing and Geographical Information Code: MIA03104 4 Credits [LTP: 4-0-0]
A. DETAILED SYLLABUS
B. RECOMMENDED STUDY MATERIAL:
Pollution Management: Management of radioactive pollutants, Noise level measurement techniques, Instrumentation for environmental pollution, Monitoring and audit, Instrumentation setup for pollution abatement.
Unit Contents
Remote Sensing Aerial photography and photogrammetry: basic principles, photographic systems, visual interpretation and mapping. Ground truth verification radiometer and its application. Basic concepts of remote sensing: Idealized remote sensing system. Physics of remote sensing, electromagnetic spectrum, black body concept, atmospheric windows, geometry of scanners, CCD arrays and platforms, history of space imaging characteristics of space platform like LANDSAT, SPOT, IRS, etc. Characteristics of sensors like MSS, TM, LISS I and LISS II. Outputs from various sensors. Classification of digital data and information: Supervised, unsupervised. Extractionprocedure for different applications and terrain evaluation. Thematic interpretation, transfer of interpreted thematic information to base map. Ground verification. Application of remote sensing: Civil Engineering, Earth Science, Forestry, Agriculture, Oceanography, Fisheries, Water resources, Town planning and land use/land cover mapping. Geographic Information System Introduction: Map and use of maps through time, thematic and multiple theme maps, Development of GIS as an introduction and decision making system An Overview of GIS: Definition, Objectives and basic concepts, Contributing disciplines and technologies. Digital Representation of Geographic Data: Technical issues related to digital representation of geographic data, Data quality and standards, Assessment of data quality, Managing spatial errors, Data standards and GIS development. Components of GIS: Computer hardware, peripherals and software Integration of Remote Sensing and GIS: Extracting metric information from Remotely Sensed images, Extracting thematic information from Remotely Sensed images, Integration of information from remote sensing in GIS .GIS application areas.
] POORNIMA UNIVERSITY
PU/2012-14/3rd SEMESTER/SYLLABUS/SET/MTECH/IAC Page 5
S.No Title of the Book Author 1. Remote Sensing and Image Interpreation, John Wiley Lillesand, M.T. and Ralph, W. 2. Elements of photogrammetry –- Mc Graw-Hill Paul R Wolf 3. Remote Sensing and Geographic information systems – BS, Publishers M. Anji Reddy 4. Fundamentals of Remote Sensing- -Universities Press George Joseph 5. Remote Sensing and its Applications, Universities Press L R A Narayan
1.3.3 Real Time & Embedded System Code: MIA03105 4 Credits [LTP: 4-0-0]
A. DETAILED SYLLABUS
B. RECOMMENDED STUDY MATERIAL:
S.No Title of the Book Author 1. Embedded microprocessor systems – Real World Design, Prentice Hall Ball S.R 2. Real Time Systems – Design for Distributed Embedded Applications,
Kluwer Academic Herma K
3. Art of Programming Embedded Systems, Academic Press, Gassle J, 4. An Introduction to Real Time Systems, PHI Raymond J.A. Buhr, Donald L. Bailey 5. Design with Micro controllers, McGraw Hill Peatman, J.B
Unit Contents
System Design: Definitions, Classifications and brief overview of micro-controllers, microprocessors and DSPs. Embedded processor architectural definitions. Typical application scenarios of embedded systems. Interface Issues Related to Embedded Systems: A/D, D/A converters, timers, actuators, power, FPGA, ASIC, diagnostic port. Techniques for Embedded Systems: State Machine and state tables in embedded design, Simulation and Emulation of embedded systems. High-level language descriptions of S/W for embedded system, Java embedded system design. Real time Models, Language and Operating Systems: Event based, process based and graph based models, Petrinet models – Real time languages – The real time kernel, OS tasks, task state4s, task scheduling, interrupt processing, clocking communication and synchronization, control blocks, memory requirements and control, kernel services. Case Studies: Discussion of specific examples of complete embedded systems using mc68 HC11, mc8051, ADSP2181, PIC series of microcontroller.

] POORNIMA UNIVERSITY
PU/2012-14/3rd SEMESTER/SYLLABUS/SET/MTECH/IAC Page 6
1.3.4 Industrial Communication Systems Code: MIA03106 4 Credits [LTP: 4-0-0]
A. DETAILED SYLLABUS
B. RECOMMENDED STUDY MATERIAL:
S.No Title of the Book Author 1. Process software and digital networks, 3rd Edition, CRC press B.G. Liptak 2. Instrumentation Reference Book”, 2nd Edition, Butterworth Heinemann Noltingk B.E. 3.
1.4 Lab III Code: MIA03207
2 Credits [LTP: 0-0-2]
A. DETAILED SYLLABUS
1.5 DISSERTATION PART I
Credits [LTP: 0-0-10]
Unit Contents
Interface: Introduction, Principles of interface, serial interface and its standards. Parallel interfaces and buses. Fieldbus: Use of fieldbuses in industrial plants, functions, international standards, performance, use of Ethernet networks, fieldbus advantages and disadvantages. Fieldbus design, installation, economics and documentation. Instrumentation network design and upgrade: Instrumentation design goals, cost optimal and accurate sensor networks. Global system architectures, advantages and limitations of open networks, HART network and Foundation fieldbus network. PROFIBUS-PA: Basics, architecture, model, network design and system configuration. Designing PROFIBUS-PA and Foundation Fieldbus segments: general considerations, network design.
Unit Contents
3-4 Experiments based on each theory subject will have to be carried out.
Unit Contents
Dissertation Part I consist of Finalization of thesis title based on literature review carried out during Semester I and II
Objective finalization & presentation Design & experimentation details Experimentation work (partial) Part I thesis preparation Presentation and submission of research prepare based on experimentation carried out.

] POORNIMA UNIVERSITY
PU/2012-14/3rd SEMESTER/SYLLABUS/SET/MTECH/IAC Page 7
School of ENGINEERING & TEchNoloGY
Teaching Schemes – Fourth Semester
Subject Code Subject Name Teaching Scheme (Hrs per week) Credits Lec Tut Prac Dissertation Part II Presentation 4 4 Viva-Voce 16 Total 4 20
DISSERTATION PART II Credits [LTP: 0-0-20]
Unit Contents
Dissertation Part II includes completion of experimentation work final thesis writing, presentation to internal expert committee Research paper publication in some journal/conference Presentation / demonstration to external examiners.
Page 1Page | 1
M.Tech. (Industrial
Automation & Control)
Detailed Syllabus IV Semester
Detailed Syllabus – IV Semester
SCHOOL OF ENGINEERING & TECHNOLOGY

] POORNIMA UNIVERSITY
PU/2013-15/4th SEMESTER/SYLLABUS/SET/MTECH/IAC Page 2
M. Tech. INDUSTRIAL AUTOMATION & CONTROL (IAC) Syllabus – Fourth Semester
DISSERTATION PART II Credits [LTP: 0-0-20]
Unit Contents
Dissertation Part II includes completion of experimentation work final thesis writing, presentation to internal expert committee Research paper publication in some journal/conference Presentation / demonstration to external examiners.